Изобретение относится к посадочным системам многоразовых космических кораблей с манипуляторами-ловушками (улавливающими устройствами).
Из уровня техники известен параллельный робот для тренировки нижних конечностей, приводимый в действие гибким кабелем с избыточным ограничением, робот включает в себя внешнюю раму, дублирующее устройство подачи гибкого троса, регулируемое фиксирующее устройство для верхней конечности, датчики тока в ноге и устройства для фиксации стопы, при этом регулируемое фиксирующее устройство для верхней конечности, регулируемое фиксирующее устройство для ног нижних конечностей, датчики и устройства для фиксации стопы расположены во внешней раме, регулируемое фиксирующее устройство для ношения верхней конечности надевается на часть тела человека выше талии, датчики тока для ног нижних конечностей надеваются на ноги человеческого тела, а устройства для фиксации стопы надеваются на ступни человеческого тела и закреплены на спортивной площадке, датчики тока нижней конечности и датчики давления, расположенные на устройствах фиксации стопы, определяют намерение движения человеческого тела (см. CN111419632, опубл. в 2020 году). В данном техническом решении механизм параллельного робота даёт возможность очень оперативно (почти мгновенно) реагировать на малейшее движение (намерение) человеческого тела.
Известно использование параллельных роботов для перемещения грузов (см. CN 111409069, опубл. в 2020 году, а также US2020001552, опубл. в 2020 году; WO2019241690, опубл. в 2019 году; KR20190123957, опубл. в 2019 году).
Известен космический аппарат для утилизации космического мусора и систему утилизации космического мусора в топливо на основе измельченного в барабанно-шаровой мельнице космического мусора для двигателей космического аппарата, роботизированную систему поиска космического мусора, при этом ловушка для космического мусора состоит из деформируемых куполообразной и конусообразной сетей, сходящихся-расходящихся друг относительно друга и связанных между собой тросами, которые затягиваются с помощью телескопического обруча куполообразной сети и телескопических балок конусообразной сети, образуя при этом замкнутую полость (см. патент на изобретение RU2686415, опубл. в 2019 году). Такое устройство может выполнять свою функцию только в космическом пространстве, где нет действия силы тяготения земли.
Известно захватное устройство для манипулятора космического назначения, содержащее корпус, выравнивающие лепестки, выдвижную штангу, головку захвата с защелками, преобразователь вращательного движения привода в поступательное движение выдвижной штанги, механизм сочленения электроразъемов, а в качестве преобразователя вращательного движения электропривода захватного устройства в поступательное движение выдвижной штанги с головкой захвата используется втулка, жестко закрепленная на корпусе захватного устройства, оснащенная двумя группами винтовых пазов с переменными углами подъема, механизм сочленения электроразъемов расположен в активной части захватного устройства и выполнен независимым (см. патент на полезную модель RU181772, опубл. в 2018 году). Это устройство предназначено для захвата, удержания, ориентации и освобождения свободнолетающих космических объектов, выполняя, по сути, роль ловушки для космического «мусора», а также для стыковки/расстыковки космических кораблей.
Известна система стыковки космического корабля, включающая конструкцию параллельного робота с кабелями для быстрого и точного выполнения стыковки космического корабля, позволяет стыковать корабль сближения с целевым кораблем, включает: множество опорных баз, которые устанавливаются в стыковочной части целевого корабля, простираются к внешней стороне стыковочной части целевого корабля и являются снабжен направляющим роликом на его конце; приводной блок, который установлен на целевом корабле; множество кабелей, которые наматываются или разматываются с помощью приводного блока и проходят через направляющий ролик каждой опорной базы; концевой эффектор, который соединен с множеством тросов, проводимых через направляющие ролики, обеспечивает различные положения среди множества опорных оснований в соответствии с регулировкой длины троса и присоединен к стыковочной части корабля сближения (см. KR101808553, опубл. в 2017 году с названием «A spacecraft docking system using a cable-driven parallel robot structure»). Это устройство предназначено для использования на орбите при стыковке космических кораблей.
Известно устройство для взлета и посадки беспилотного летательного аппарата, содержащее посадочную площадку, устройство захвата строп парашюта, манипулятор с закрепленными на нем видеокамерой и электронными посадочными средствами излучения в разных диапазонах частоты с конусообразными диаграммами направленности, консоль, двухплоскостной стабилизатор, приемную камеру и индикатор, причем к посадочной площадке шарнирно закреплен своим концом манипулятор, который другим своим концом шарнирно прикреплен к консоли, при этом другой конец консоли соединен с двухплоскостным стабилизатором, причем манипулятор выполнен телескопическим с четырьмя степенями свободы и возможностью изменения угловой скорости, а сетка-улавливатель шарнирно прикреплена к посадочной площадке и выполнена с возможностью ее складывания при складывании посадочной площадки в приемную камеру (см. патент на изобретение RU2694251, опубл. в 2018 году). Это устройство имеет следующие средства для посадки летательного аппарата: посадочную площадку, устройство захвата, манипулятор, улавливатель. Однако оно относится к устройствам для управления беспилотными летательными аппаратами, в частности для взлета и захвата строп при спуске на парашюте.
Наиболее близким техническим решением к заявленному изобретению является система для приема ракет с вертикальным приземлением, включающая посадочную платформу, по периметру которой установлены стационарные опоры, связанные направляющими, представляющую собой расположенные в верхней зоне опор рельсы с тележками, тросовую систему улавливания ракет с окном-ловушкой и механизмы перемещения тележек с закрепленными на них тросами вдоль рельсовых направляющих, а также электронную посадочную систему (см. https://www.researchgate.net/publication/347616346_Arresting-Cable_System_for_Robust_Terminal_Landing_of_Reusable_Rockets). Такая конструкция движущихся механизмов имеет недостаточную скорость перемещения при улавливании космического корабля при высокой инерционности движения длинного троса. В процессе улавливания корпуса космического корабля размер тросового окна-ловушки остаётся неизменным. Это не позволяет уводить тросы от пламени факела тормозных двигателей корабля. А улавливание падающего в свободном падении крупного космического корабля и вовсе может привести к полному разрушению инфраструктуры посадочной площадки. Жесткая привязанность к неизменному размеру улавливающего окна не позволяет ему обходить на корабле разные рулевые крылья и другие технологические неровности на поверхности корабля.
Технической проблемой является безопасная посадка приземляющегося многоразового космического корабля под действием тормозных двигателей на заранее возведенную посадочную площадку. Работающие двигатели существующих в настоящее время многоразовых космических кораблей с вертикальной посадкой, задача которых посадить корабль в четко очерченный контур, часто сжигают и разрушают саму площадку и её инфраструктуру. В ситуации, когда не удаётся посадить корабль на площадку, он может взорваться, или разбиться.
Настоящее изобретение направлено на решение технической задачи повышения безопасности посадки многоразового космического корабля, исключения пожароопасной обстановки и разрушения корабля и инфраструктуры.
Решение поставленной технической задачи достигается тем, что в станции обеспечения мягкой посадки космических кораблей, включающей посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, ловушка выполнена накидной в виде подвижно установленной на внутренних концах тросов рамки с жестко натянутыми внутри тросами, образующими улавливающие ячейки, а механизмы перемещения тросов ловушки попарно закреплены на стационарных опорах один над другим и выполнены в виде приводов с механизмами торможения.
А также тем, что станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, причём ловушка выполнена в виде подвижно установленной на тросах рамки с подвижно установленными внутри рамки тросами, образующими улавливающие ячейки, при этом механизмы перемещения тросов ловушки закреплены на стационарных опорах, выполнены в виде привода с механизмами торможения, а механизмы перемещения тросов внутри рамки ловушки закреплены на кронштейнах рамки и выполнены в виде дополнительных приводов перемещения с механизмами торможения. Рамка ловушки выполнена из жестко закрепленных на кронштейнах тросов, а расположенные внутри рамки тросы выполнены подвижными и снабжены роликовыми механизмами, расположенными с противоположных концов этих тросов с возможностью перемещения вдоль рамки, и связанными с дополнительными приводами перемещения, расположенными на кронштейнах рамки. Рамка ловушки выполнена из жестко закрепленных на кронштейнах тросов, а расположенные внутри рамки тросы выполнены подвижными, снабжены роликовыми механизмами с одного конца с возможностью перемещения вдоль рамки и связаны с дополнительными приводами перемещения, при этом противоположные концы тросов рамки установлены поворотно на кронштейнах рамки. Рамка ловушки выполнена из парных жестко закрепленных на кронштейнах тросов, а расположенные внутри рамки парные тросы выполнены подвижными и снабжены роликовыми механизмами с возможностью перемещения вдоль рамки, расположенными с противоположных концов этих тросов, и связанными с дополнительными приводами перемещения, расположенными на кронштейнах рамки. Рамка ловушки выполнена жесткой, а расположенные внутри рамки тросы выполнены подвижными и снабжены роликовыми механизмами с возможностью перемещения вдоль рамки, расположенными с противоположных концов этих тросов, и связанными с дополнительными приводами перемещения, расположенными на кронштейнах рамки. Рамка ловушки выполнена жесткой, а расположенные внутри рамки тросы выполнены подвижными, снабжены роликовыми механизмами с одного конца с возможностью перемещения вдоль рамки и связаны с дополнительными приводами перемещения, при этом противоположные концы тросов рамки установлены поворотно на кронштейнах рамки.
А также тем, что станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, при этом направляющие, связывающие стационарные опоры, выполнены в виде верхнего контура силовых тросов, установленных на роликовых блоках, закрепленных на стационарных опорах и снабженных парными каретками с возможностью перемещения посредством приводов с механизмами перемещения и торможения, при этом парные тросы, размещенные внутри направляющих и закрепленные на каретках с возможностью перемещения относительно силовых тросов, представляют собой ловушку, образующую при сдвигании друг к другу улавливающую квадратную ячейку, причем механизмы перемещения кареток ловушки закреплены на стационарных опорах, а механизмы растяжения тросов ловушки установлены на каретках и выполнены в виде приводов с механизмами растяжения и торможения. Станция снабжена нижним контуром с направляющими для перемещения кареток, предназначенных для размещения приводов с механизмами синхронизации, растяжения и торможения тросов ловушки, установленных на каретках верхнего контура силовых тросов. Станция снабжена нижним контуром с направляющими рейками для горизонтального перемещения кареток тормозных гидроцилиндров, связанных с тросами ловушки, установленными на каретках верхнего контура силовых тросов.
А также тем, что станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, при этом направляющие, связывающие стационарные опоры, размещены на парных верхних жестких контурах, закрепленных на стационарных опорах один под другим, при этом каждая направляющая снабжена парными каретками с возможностью перемещения посредством приводов с механизмами перемещения и торможения тросов, представляющих собой ловушки, размещённые одна под другой и образующие при сдвигании друг к другу улавливающую квадратную ячейку, причем механизмы перемещения кареток ловушки закреплены на стационарных опорах, а механизмы растяжения тросов ловушки установлены на каретках и выполнены в виде приводов с механизмами растяжения и торможения.
А также тем, что станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, выполнена многоуровневой, при этом ловушка первого уровня выполнена накидной в виде подвижно установленной на внутренних концах тросов рамки с жестко натянутыми внутри тросами, образующими улавливающие ячейки, а механизмы перемещения тросов ловушки попарно закреплены на стационарных опорах один над другим и выполнены в виде приводов с механизмами торможения, а направляющие второго уровня, связывающие стационарные опоры, размещены под первым уровнем и выполнены в виде верхнего контура силовых тросов, установленных на роликовых блоках, закрепленных на стационарных опорах и снабженных парными каретками с возможностью перемещения посредством приводов с механизмами перемещения и торможения, при этом парные тросы, размещенные внутри направляющих и закрепленные на каретках с возможностью перемещения относительно силовых тросов, представляют собой ловушку, образующую при сдвигании друг к другу улавливающую квадратную ячейку, причем механизмы перемещения кареток ловушки закреплены на стационарных опорах, а механизмы растяжения тросов ловушки установлены на каретках и выполнены в виде приводов с механизмами растяжения и торможения, при этом направляющие третьего уровня размещены на жестких контурах, расположенных под вторым уровнем, при этом каждая направляющая снабжена парными каретками с возможностью перемещения посредством приводов с механизмами перемещения и торможения тросов, представляющих собой ловушки, образующие при сдвигании друг к другу улавливающую квадратную ячейку, причем механизмы перемещения кареток ловушки закреплены на стационарных опорах, а механизмы растяжения тросов ловушки установлены на каретках и выполнены в виде приводов с механизмами растяжения и торможения, а ловушка четвертого уровня выполнена в виде подвижно установленной на тросах рамки с подвижно установленными внутри рамки тросами, образующими улавливающие ячейки, при этом механизмы перемещения тросов ловушки закреплены на стационарных опорах, выполнены в виде привода с механизмами торможения, а механизмы перемещения тросов внутри рамки ловушки закреплены на кронштейнах рамки и выполнены в виде дополнительных приводов перемещения с механизмами торможения, при этом посадочная площадка снабжена подвижной опорой посредством тросов, связанных с механизмами перемещения и торможения тросов.
Изобретение поясняется чертежами.
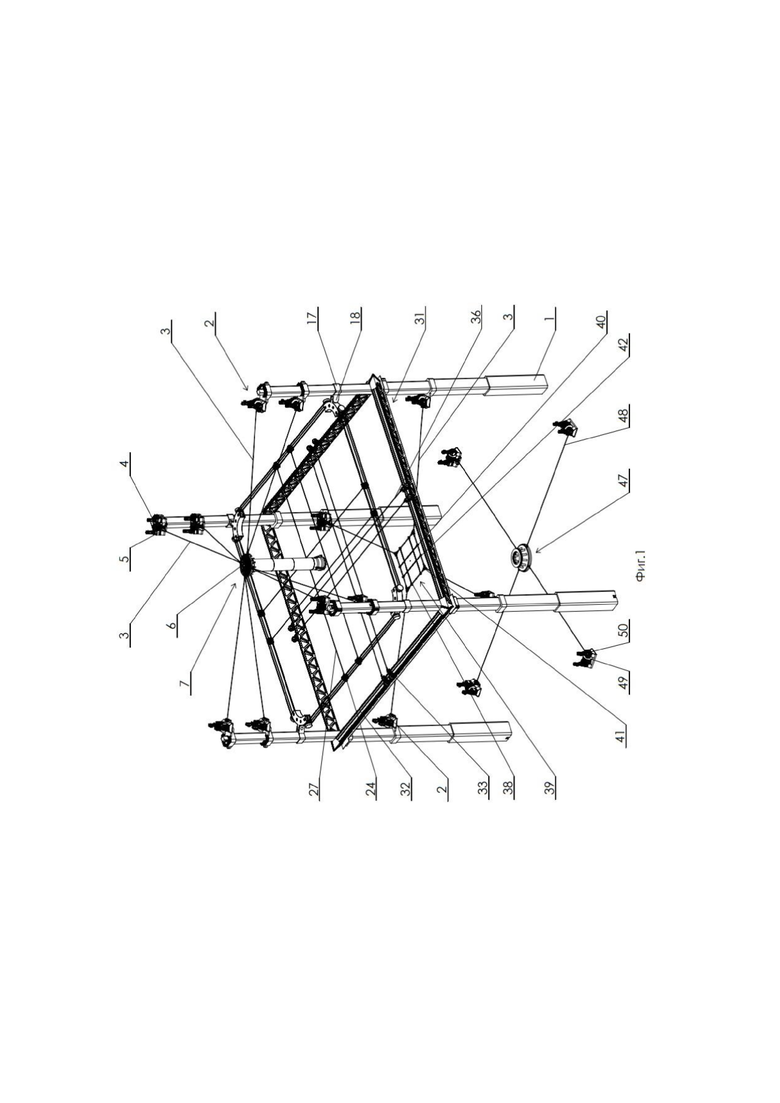
На фиг. 1 изображен общий вид многоуровневой станции обеспечения мягкой посадки космических кораблей, в изометрии. На фиг. 2 – восьмилучевая четырёхопорная станция. На фиг. 3 – то же, опора в изометрии. На фиг. 4 – то же, лебедки, расположенные на опоре. На фиг. 5 – то же, решетчатая ловушка. На фиг. 6 – четырёхопорная станция с силовой тросовой системой по верхнему периметру для перемещения кареток канатов ловушки. На фиг. 7 – то же, роликовый блок растяжки силовой тросовой системы в изометрии. На фиг. 8 – то же, каретки перемещения каната, вид спереди. На фиг. 9 – то же, каретки перемещения каната, вид сзади. На фиг. 10 – то же, канатная ловушка. На фиг. 11 – многоопорная станция с двумя контурами по периметру жестких рамных конструкций для размещения направляющих кареток перемещения каната. На фиг. 12 то же, фрагмент рамной конструкции с каретками, в изометрии. На фиг. 13 – четырёхопорная станция с верхним тросовым контуром и нижним жёстким контуром, предназначенными для перемещения кареток каната. На фиг. 14 – то же, роликовый блок растяжки силовой тросовой системы в изометрии. На фиг. 15 – то же, каретки перемещения каната, вид спереди. На фиг. 16 – то же, каретки перемещения каната, вид сзади. На фиг. 17 – то же, фрагмент нижнего жёсткого контура с каретками. На фиг. 18 – то же, система синхронизации движения канатов. На фиг. 19 – четырёхопорная станция с верхним тросовым контуром, нижним жёстким контуром и гидроцилиндрами для перемещения канатов. На фиг. 20 – то же, фрагмент станции с гидроцилиндрами перемещения канатов. На фиг. 21 – четырёхлучевая четырёхопорная станция. На фиг. 22 – то же, решетчатая тросовая ловушка. На фиг. 23 – шестилучевая трёхопорная станция. На фиг. 24 – то же, решетчатая треугольная тросовая ловушка. На фиг. 25 – тросовая четырёхугольная ловушка. На фиг. 26 – тросовая четырёхугольная ловушка, заключенная в кольцо. На фиг. 27 – десятилучевая пятиопорная станция. На фиг. 28 – то же, пятигранная тросовая ловушка. На фиг. 29 – двенадцатилучевая шестиопорная станция. На фиг. 30 – то же, шестигранная тросовая ловушка звездочной формы. На фиг. 31 – то же, шестигранная тросовая ловушка лучевой формы. На фиг. 32 – четырнадцатилучевая семиопорная станция. На фиг. 33 – то же, семигранная тросовая ловушка звездочной формы. На фиг. 34 – шестнадцатилучевая восьмиопорная станция. На фиг. 35 – то же, восьмигранная тросовая ловушка звездочной формы. На фиг. 36 – шестигранная станция с ловушкой лучевой формы. На фиг. 37 – восьмигранная станция с ловушкой лучевой формы.
Станция обеспечения мягкой посадки космических кораблей основана на работе тросовых (канатных) систем (в технике такие системы чаще всего называют «параллельными роботами») с функцией сверхбыстрой ловушки приземляющегося космического корабля. На фиг. 1 изображена многоуровневая станция обеспечения мягкой посадки космических кораблей. Первый уровень захватывания космических кораблей показан на примере восьмилучевой четырёхопорной системы: на бетонных опорах 1 расположены подвижные механизмы 2 перемещения канатов (тросов) 3. Механизмы 2 могут располагаться на горизонтальных площадках бетонных опор 1, расположенных попарно по высоте опоры 1. Механизмы 2 представляют собой барабаны 4 с канатами 3 и редукторами 5. Каждый канат 3 одним концом закреплён на раме 6 ловушки 7, а другим концом намотан на барабан 4. Причём попарно связанные с рамой 6 концы канатов 3 расположены вертикально (один под другим) и закреплены на кронштейнах 8 рамы 6 ловушки 7. Ловушка 7 может быть выполнена в виде, например, рамки 6 круглой формы усиленного типа в виде концентрично расположенных колец 9 и 10, жёстко связанных между собой распорками 11. Причём кронштейны 8 канатов 3 закреплены на внешней стороне наружного кольца 9. Сеть ловушки 7 выполнена из жёстко натянутых тросов 12, расположенных внутри внутреннего кольца 10. Такая накидная ловушка 7 предназначена для улавливания космического корабля 13 за расположенный в его верхней зоне зацеп 14, который при контакте с тросами 12 ловушки 7 имеет возможность раскрываться, как зонтик. Причём эта ловушка 7 предназначена для накидывания сверху на опускающийся в зону приземления (станции обеспечения мягкой посадки) корабль 13 после того, как корабль опустится ниже натянутых тросов 12. Скорость срабатывания такой ловушки 7 значительно выше скорости спускания космического корабля с помощью тормозных двигателей.
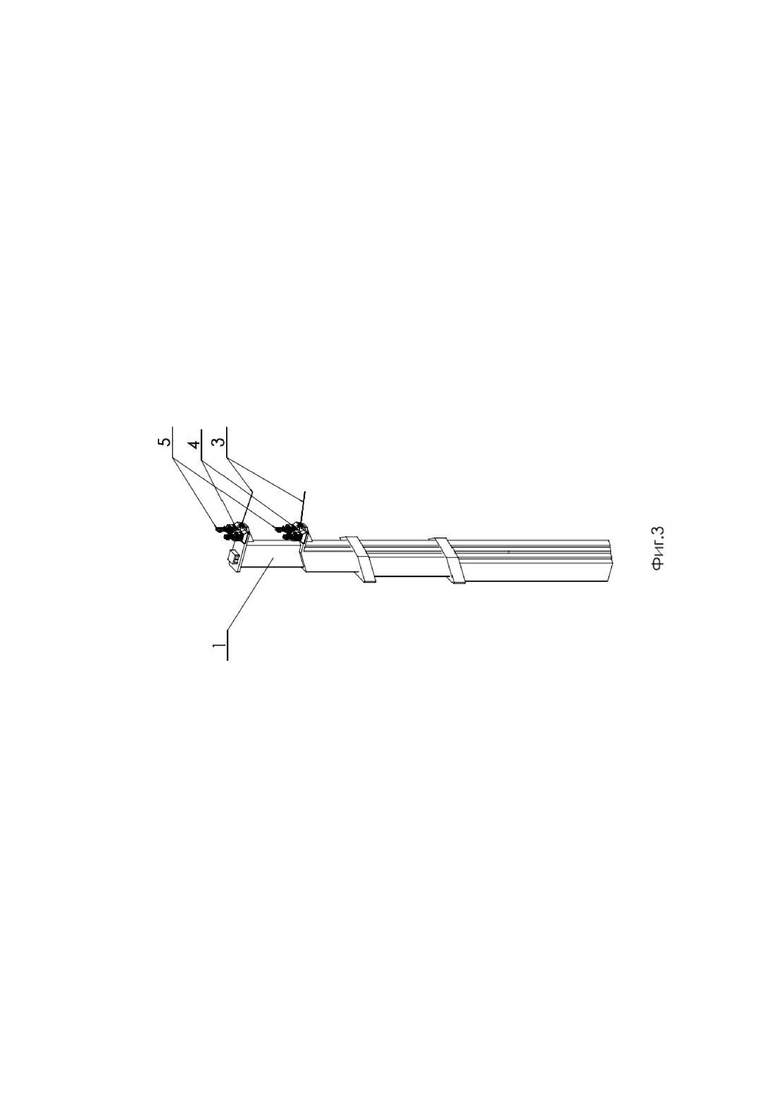
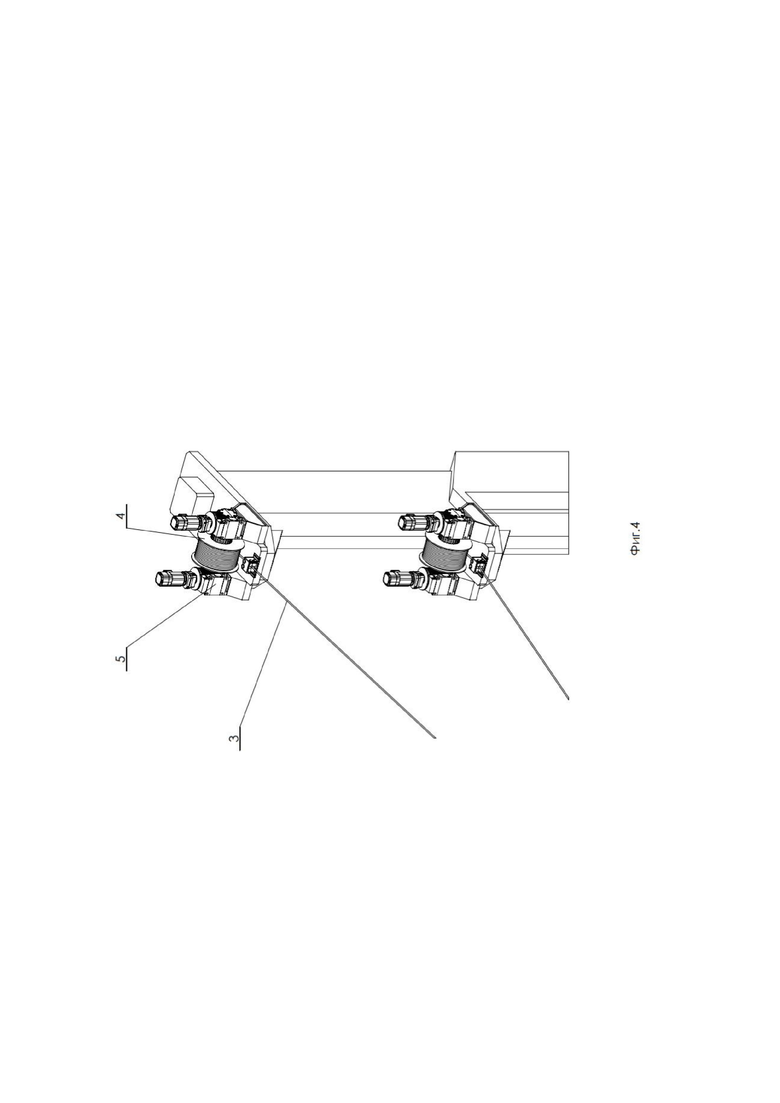
Этот первый уровень захватывания космических кораблей можно использовать отдельно от остальных механизмов. Такая восьмилучевая четырёхопорная станция обеспечения мягкой посадки космических кораблей изображена на фиг. 2-5.
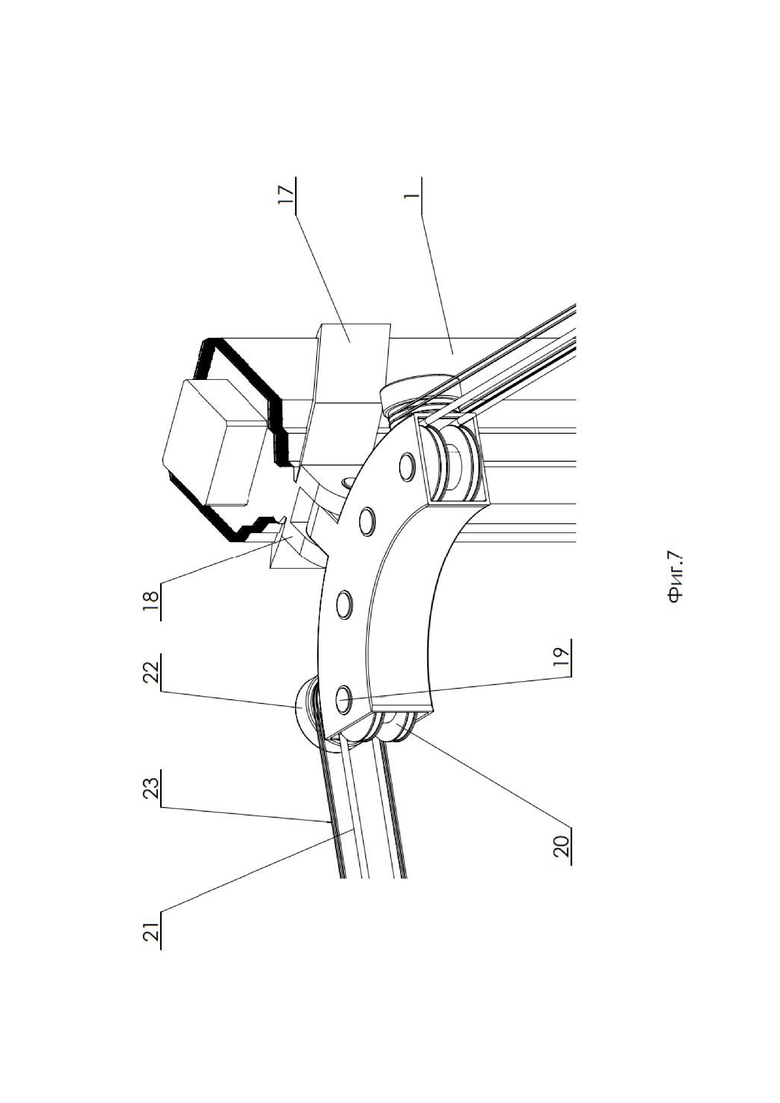
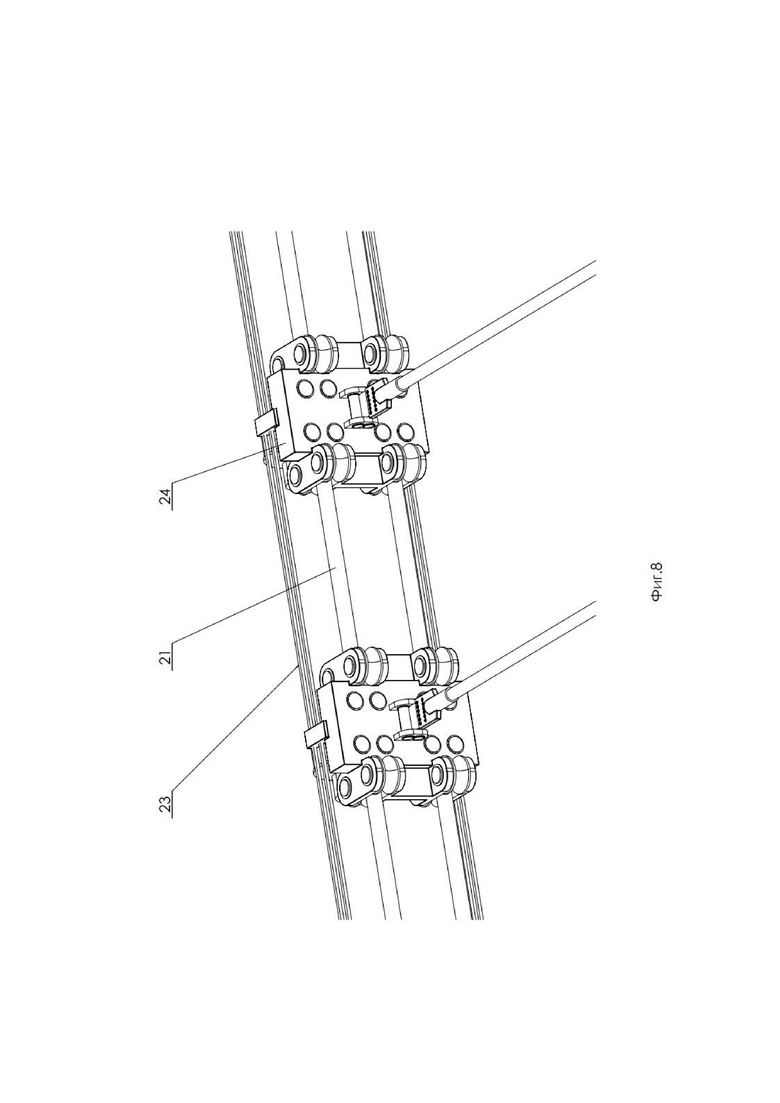
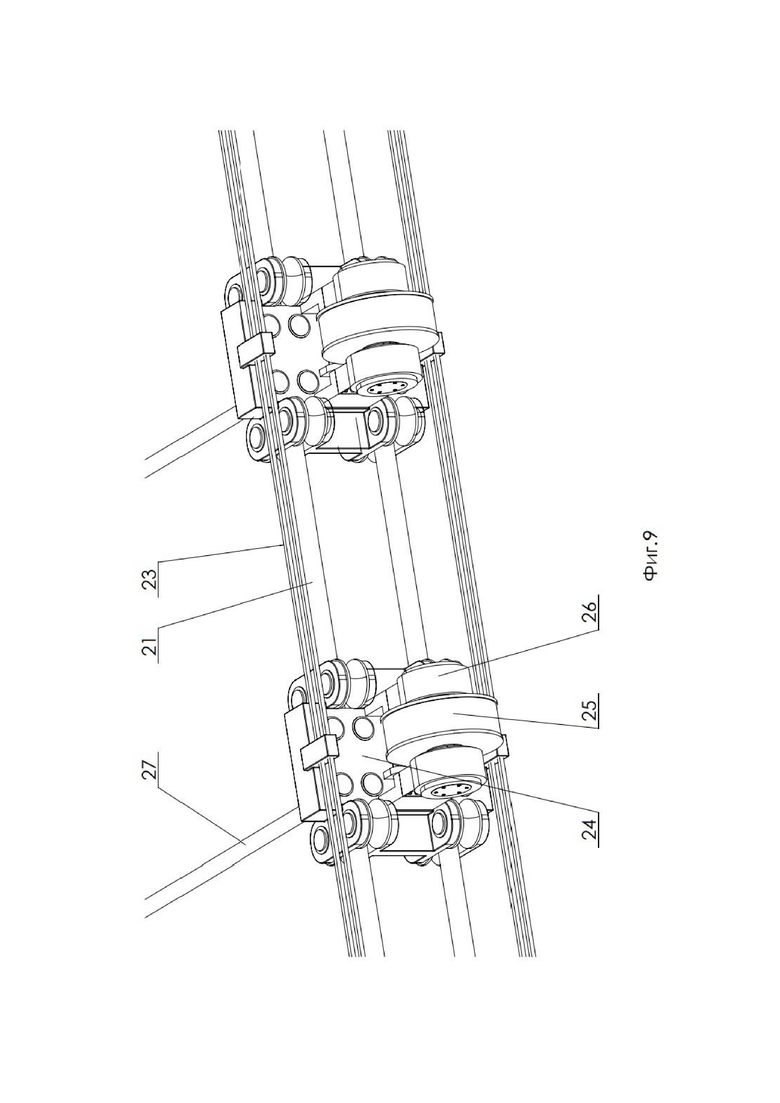
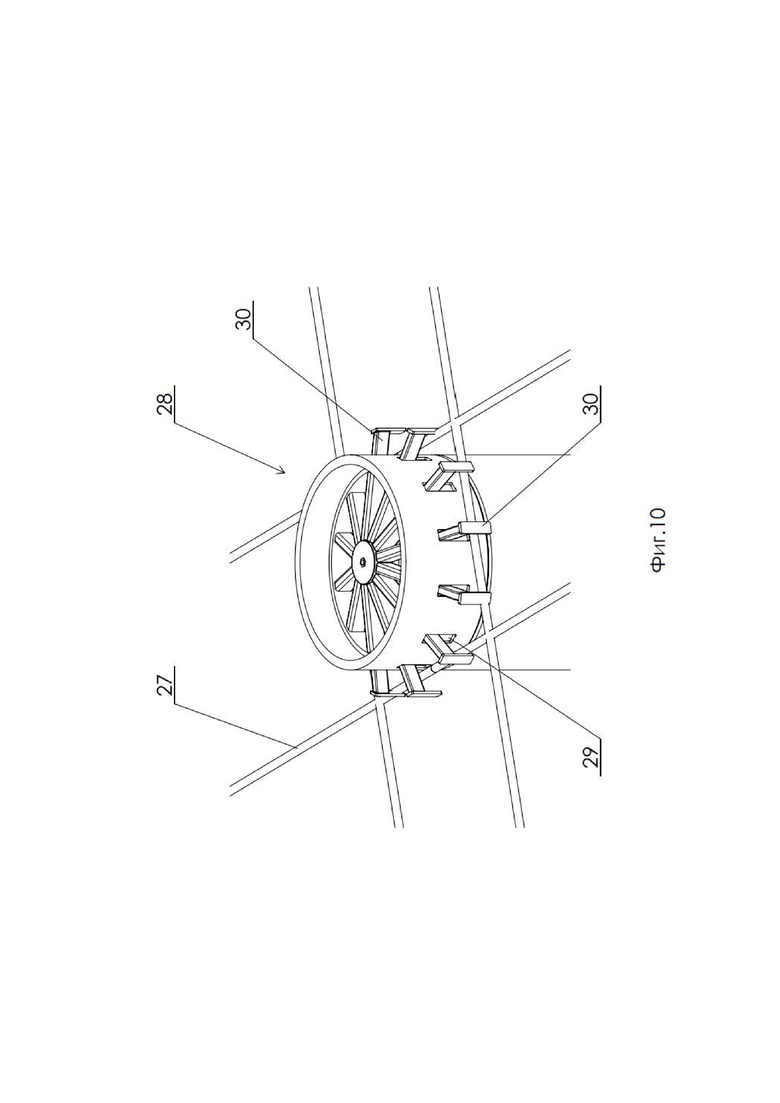
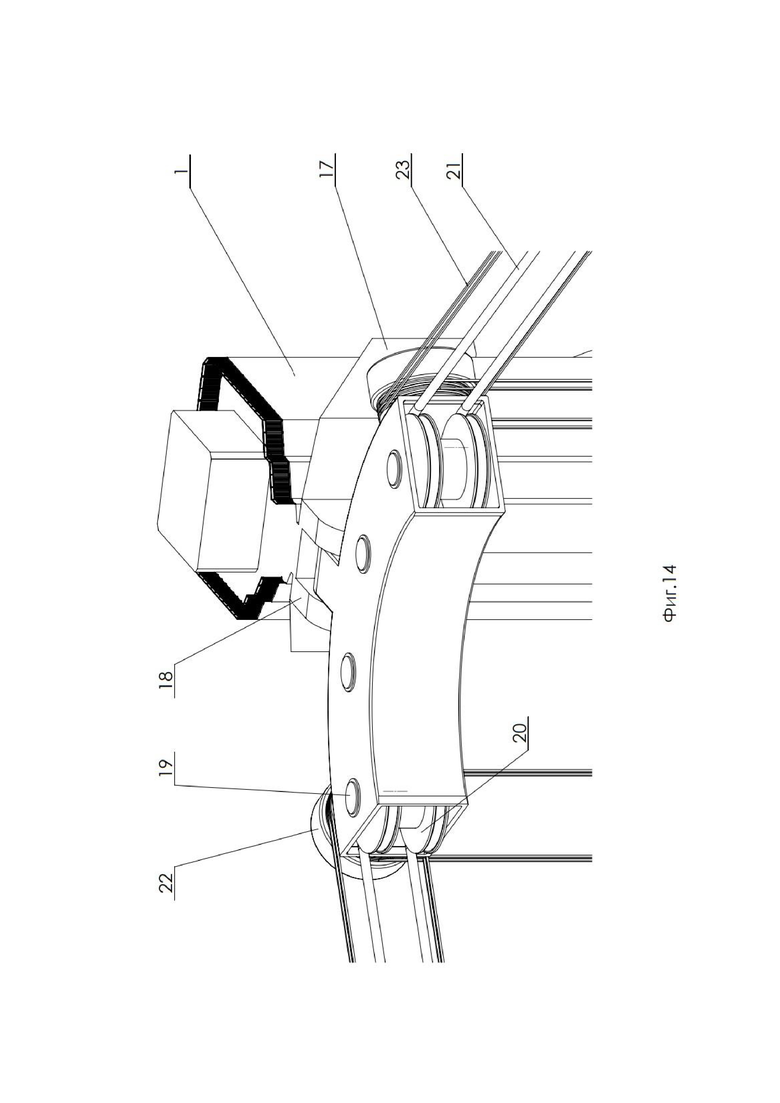
Станция обеспечения мягкой посадки космических кораблей может включать второй уровень захватывания космических кораблей (см. фиг. 1). Под первым уровнем на бетонных опорах 1 расположены пояса 17 с закреплёнными на них кронштейнами 18 роликовых блоков. Роликовые блоки представляют собой закреплённые на вертикальной оси 19 ролики 20 для силовых тросов 21. Приводные моторы 22 (моторы позиционирования) также закреплены на кронштейнах 18 и служат для привода ремней 23. На силовых тросах 21 подвешены каретки 24, приводимые в движение ремнями 23. Каждая каретка 24 снабжена тормозным барабаном 25 с гидравлическим устройством торможения (на рисунке не показано) и моторами 26. На каждой каретке 24 закреплен канат (трос) 27 ловушки 28. Канаты (тросы) 27 ловушки 28 предназначены для улавливания (захватывания) космических кораблей, спускаемых в зону станции, за раскрываемые в верхней зоне космического корабля через его пазы 29 зацепы 30 типа «зонтик».
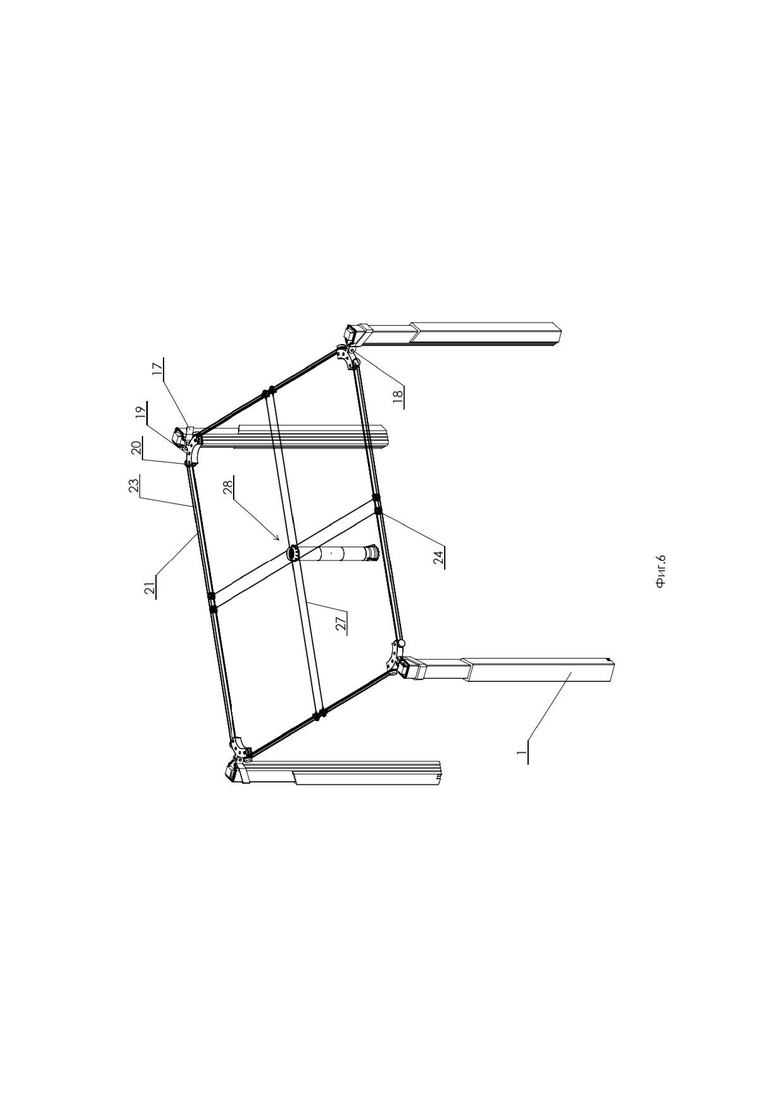
Такой второй уровень захватывания космических кораблей также можно использовать отдельно от остальных механизмов. Четырёхопорная станция с силовой тросовой системой по верхнему периметру для перемещения кареток канатов ловушки станция обеспечения мягкой посадки космических кораблей изображена на фиг. 6-10.
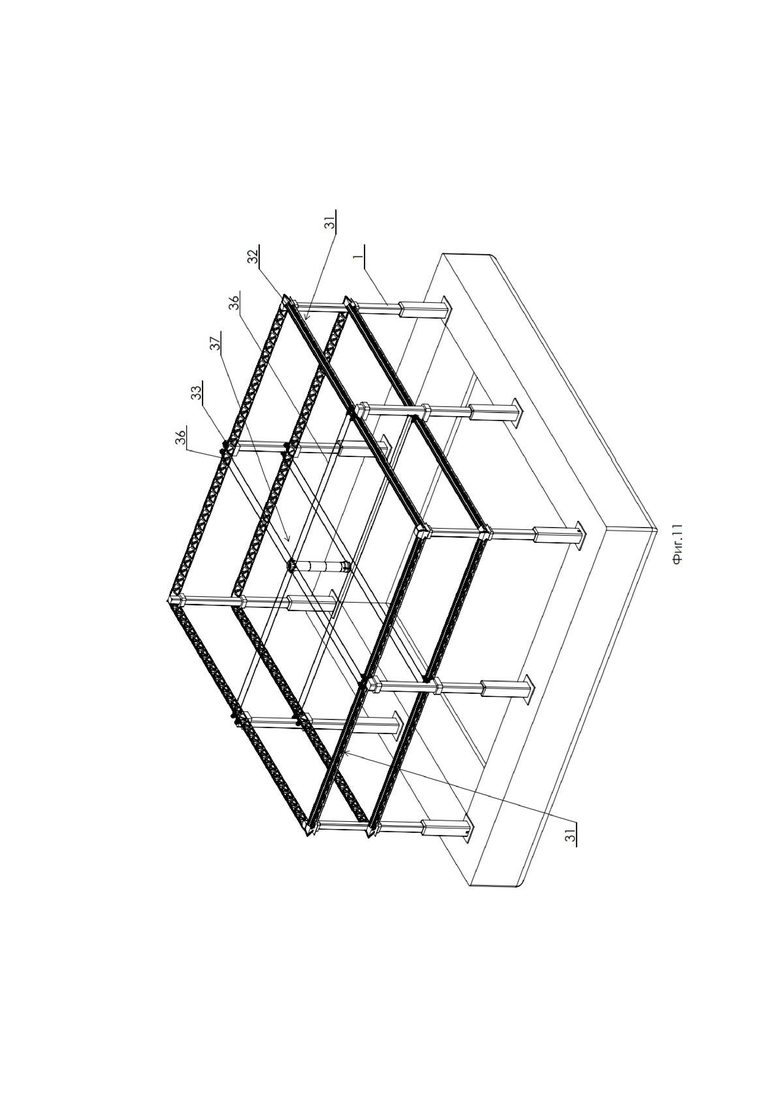
Станция обеспечения мягкой посадки космических кораблей может включать третий уровень захватывания космических кораблей (см. фиг. 1). Его конструкция похожа на конструкцию четырёхопорной станции с силовой тросовой системой по верхнему периметру для перемещения кареток канатов (тросов) ловушки, изображённой на фиг. 6-10. Отличие третьего уровня заключается в том, что вместо тросовой системы на опорах 1 установлен жёсткий каркас 31, выполненный в виде фермы с параллельными поясами. На каркасе 31 размещены направляющие 32 для кареток 33. Каждая каретка 33 оснащена тормозным барабаном 34 с гидравлическим устройством торможения (на рисунке не показано) и моторами 35. На каретках 33 жёстко закреплены концы канатов (тросов) 36 ловушки 37.
Третий уровень захватывания космических кораблей, изображённый на фиг. 1, также можно использовать отдельно от остальных механизмов в качестве станции обеспечения мягкой посадки космических кораблей.
Станция обеспечения мягкой посадки космических кораблей может включать нижний четвёртый уровень захватывания космических кораблей (см. фиг. 1). Этот уровень изображён на фиг. 1 в виде четырёхлучевой четырехопорной станции. Его крепление на бетонных опорах 1 представляет собой подвижные механизмы 2 перемещения канатов (тросов) 3, аналогичные механизмам 2 первого уровня. Механизмы 2 могут располагаться на горизонтальных площадках бетонных опор 1. Механизмы 2 представляют собой барабаны 4 с канатами 3 и редукторами 5. Каждый канат 3 одним концом закреплён на рамке 38 ловушки 39, а другим концом намотан на барабан 4. Рамка 38 ловушки 39 представляет собой систему растяжек (тросов) 40, связанных с кронштейнами 41, на которых закреплены концы канатов (тросов) 3. Ловушка 39 включает тросовую решётку, состоящую из системы перпендикулярно расположенных тросов 42, связанных с растяжками (тросами) 40 посредством роликовых механизмов 43. Роликовые механизмы 43 расположены с противоположных концов тросов 42 и связанны с дополнительными приводами перемещения (на рисунке не показано), расположенными на кронштейнах 41 и выполненными аналогично приводу, изображённому на фиг. 7. Размеры образованных тросами 42 клеток превышают размеры корпуса 44 космического корабля, но при смыкании тросов 42 значительно меньше размеров зацепов 45 зонтичного типа и выдвигаемых лопастей 46.
Станция обеспечения мягкой посадки космических кораблей может быть дополнительно оснащена расположенной в нижней зоне посадочной площадкой с опорой 47 для вертикальной фиксации мягко спускаемых ловушками космических кораблей. Опора 47 также может быть выполнена подвижной посредством канатов (тросов) 48, связанных с барабанами 49, оснащенными редукторами 50.
Станция обеспечения мягкой посадки космических кораблей, изображенная на фиг. 2-5, выполненная в виде восьмилучевой четырёхопорной системы, снабжена бетонными опорами 1, на которых расположены подвижные механизмы 2 перемещения канатов (тросов) 3. Механизмы 2 установлены на горизонтальных площадках бетонных опор 1, расположенных попарно по высоте опоры 1. Механизмы 2 представляют собой барабаны 4 с канатами 3 и редукторами 5. Каждый канат 3 одним концом закреплён на рамке 6 ловушки 7, а другим концом намотан на барабан 4. Причём попарно связанные с рамкой 6 концы канатов 3 расположены вертикально (один под другим) и закреплены на кронштейнах 8 рамки 6 ловушки 7. Ловушка 7 выполнена в виде рамки 6 круглой формы усиленного типа в виде концентрично расположенных колец 9 и 10, жёстко связанных между собой распорками 11. Причём кронштейны 8 канатов 3 закреплены на внешней стороне наружного кольца 9. Сеть ловушки 7 выполнена из тросов 12, расположенных внутри внутреннего кольца 10. Такая накидная ловушка 7 предназначена для улавливания космического корабля 13 за расположенный в его верхней зоне зацеп 14, который при контакте с тросами 12 ловушки 7 имеет возможность раскрываться, как зонтик. Причём эта ловушка 7 предназначена для накидывания сверху на опускающийся в зону приземления (станции обеспечения мягкой посадки) корабль 13 после того, как корабль опустится ниже натянутых тросов 12. Скорость срабатывания такой ловушки 7 значительно выше скорости спускания космического корабля.
Четырёхопорная станция с силовой тросовой системой по верхнему периметру для перемещения кареток канатов ловушки станция обеспечения мягкой посадки космических кораблей, изображенная на фиг. 6-10, включает пояса 17, расположенные на бетонных опорах 1. На поясах 17 закреплены кронштейны 18 роликовых блоков. Роликовые блоки представляют собой закреплённые на вертикальной оси 19 ролики 20 для силовых тросов 21. Приводные моторы 22 (моторы позиционирования) также закреплены на кронштейнах 18 и служат для привода ремней 23. На силовых тросах 21 подвешены каретки 24, приводимые в движение ремнями 23. Каждая каретка 24 снабжена тормозным барабаном 25 с гидравлическим устройством торможения (на рисунке не показано) и моторами 26. На каждой каретке 24 закреплен канат (трос) 27 ловушки 28. Канаты (тросы) 27 ловушки 28 предназначены для улавливания (захватывания) космических кораблей, спускаемых в зону станции, за раскрываемые в верхней зоне космического корабля через его пазы 29 зацепы 30 типа «зонтик».
Изображённая на фиг. 11 и 12 многоопорная станция с двумя контурами по периметру жестких рамных конструкций для размещения направляющих 32 кареток 33. В этой станции на опорах 1 установлен жёсткий каркас 31, выполненный в виде фермы с параллельными поясами. На каркасе 31 размещены направляющие 32 для кареток 33. Каждая каретка 33 оснащена тормозным барабаном 34 с моторами 35. На каретках 33 жёстко закреплены концы канатов (тросов) 36 ловушки 37. Принцип действия ловушки 37 аналогичен ловушке 28, изображенной на фиг. 6-10.
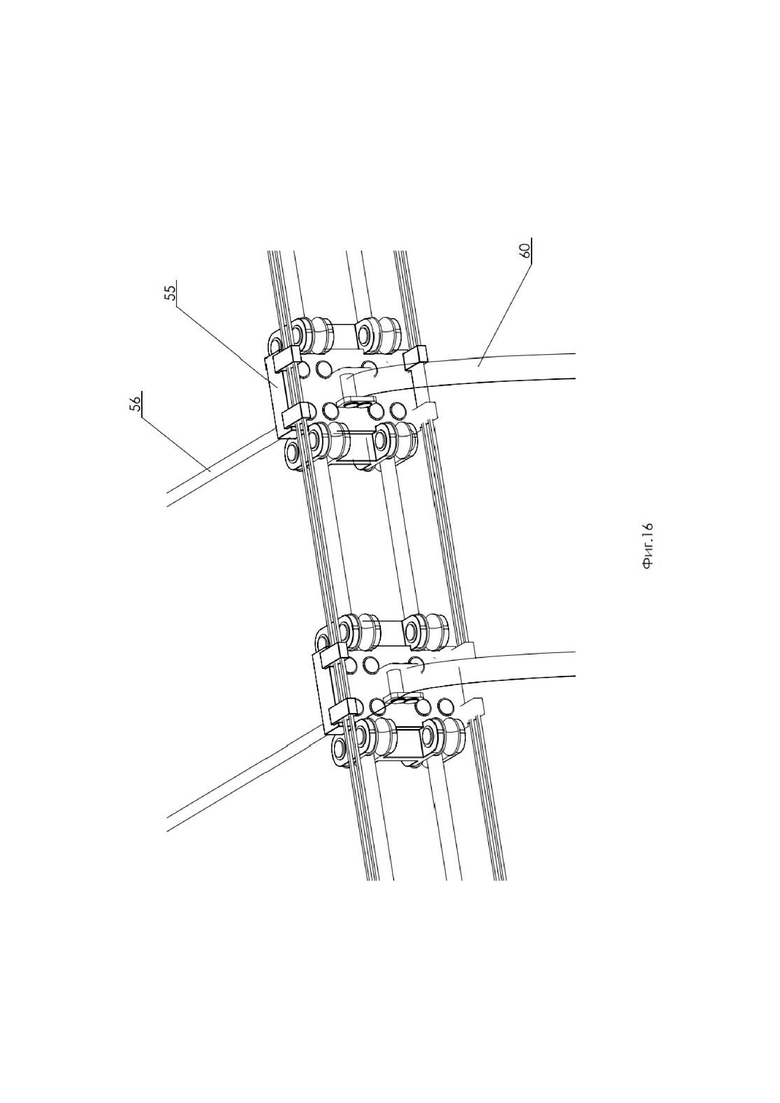
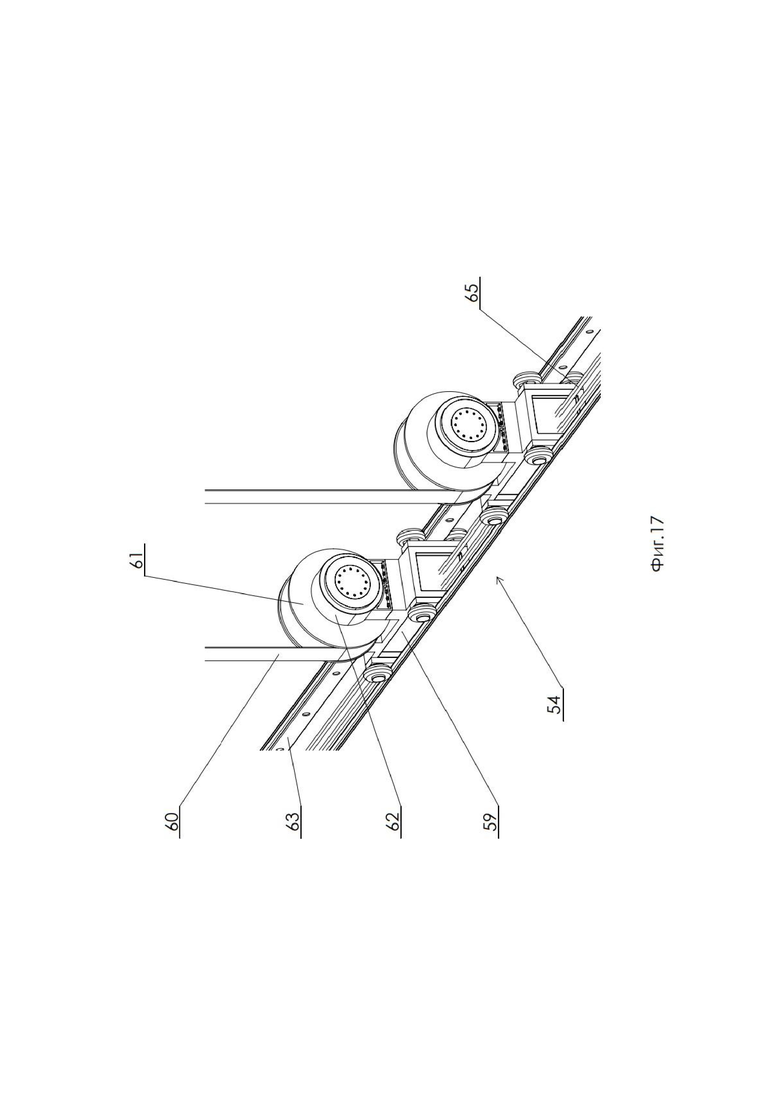
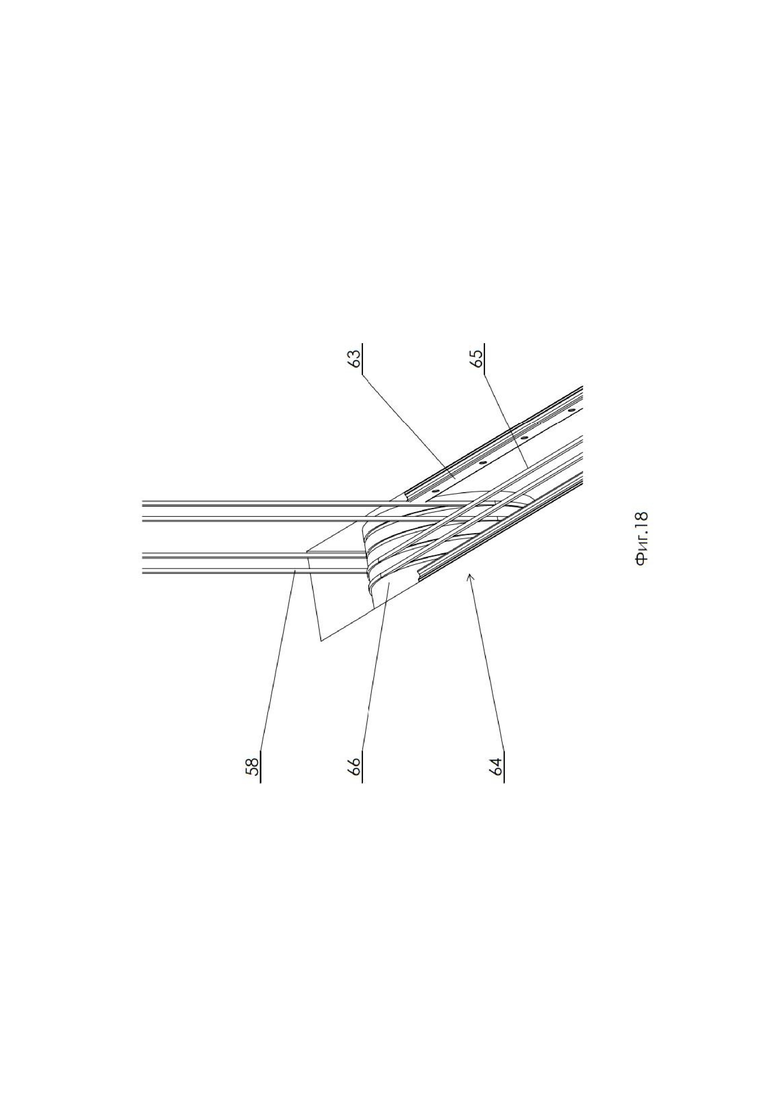
Четырёхопорная станция с верхним тросовым контуром 53 и нижним жёстким контуром 54, предназначенными для перемещения кареток 55 каната (троса) 56, изображена на фиг. 13-18. Верхний тросовый контур 53 аналогичен изображенному на фиг. 6-10. Он включает пояса 17, расположенные на бетонных опорах 1. На поясах 17 закреплены кронштейны 18 роликовых блоков. Роликовые блоки представляют собой закреплённые на вертикальной оси 19 ролики 20 для силовых тросов 21. Приводные моторы 22 (моторы позиционирования) также закреплены на кронштейнах 18 и служат для привода ремней 23. На силовых тросах 21 подвешены каретки 55, приводимые в движение ремнями 23. На каждой каретке 55 закреплен канат (трос) 56 ловушки 57. Канаты (тросы) 56 ловушки 57 предназначены для улавливания (захватывания) космических кораблей, спускаемых в зону станции, за раскрываемые в верхней зоне космического корабля через его пазы 29 зацепы 30 типа «зонтик». Отличие станции, изображённой на фиг. 13-18, заключается в том, что каждый приводной мотор 22 кронштейнов 18 связан вертикальными тросами 58 с нижним контуром 54. А каждая каретка 59 связана демпферными лентами 60 с барабанами 61, оснащёнными моторами-редукторами 62. Барабаны 61 установлены на каретках 62 с возможностью перемещения вдоль направляющих 63 нижнего контура 54. Нижний контур 54 снабжён системой 64 синхронизации движения вертикальных тросов 59 и нижних горизонтальных тросов 65 относительно барабана 66 привода системы 64 синхронизации.
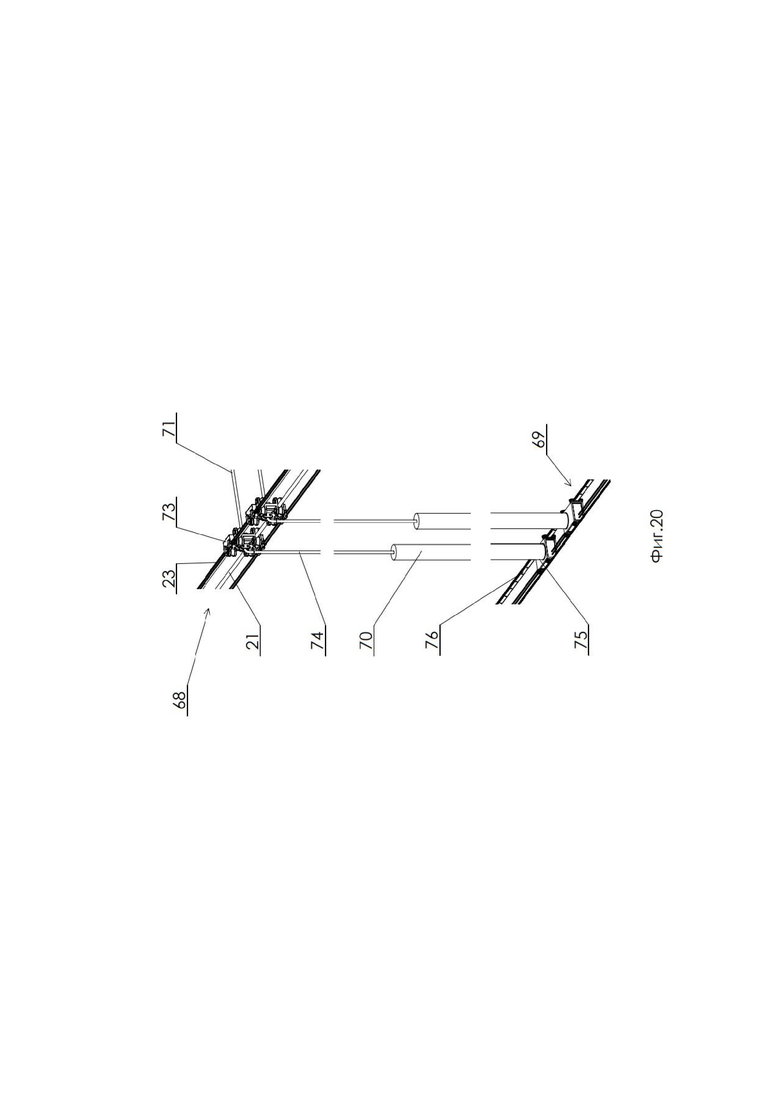
Изображённая на фиг. 19-20 четырёхопорная станция имеет верхний тросовый контур 68 и нижний жёсткий контур 69 с тормозными гидроцилиндрами 70 для перемещения канатов (тросов) 71 ловушки 72. Верхний тросовый контур 68 выполнен аналогичным вышеприведённому контуру 53 станции, изображённой на фиг. 13-18. При этом каждый канат (трос) 71 ловушки 72, размещённый на каретке 73 верхнего контура, связан посредством тормозных гидроцилиндров 70, имеющих во внутренней полости гильзы выдвижные штоки (на рисунке не показано), связанные с канатами (тросами) 74. Тормозные гидроцилиндры 70 связаны с каретками 75 нижнего контура 69. Каретки 75 предназначены для горизонтального перемещения гидроцилиндров 70 относительно направляющей рейки 76 нижнего контура 69.
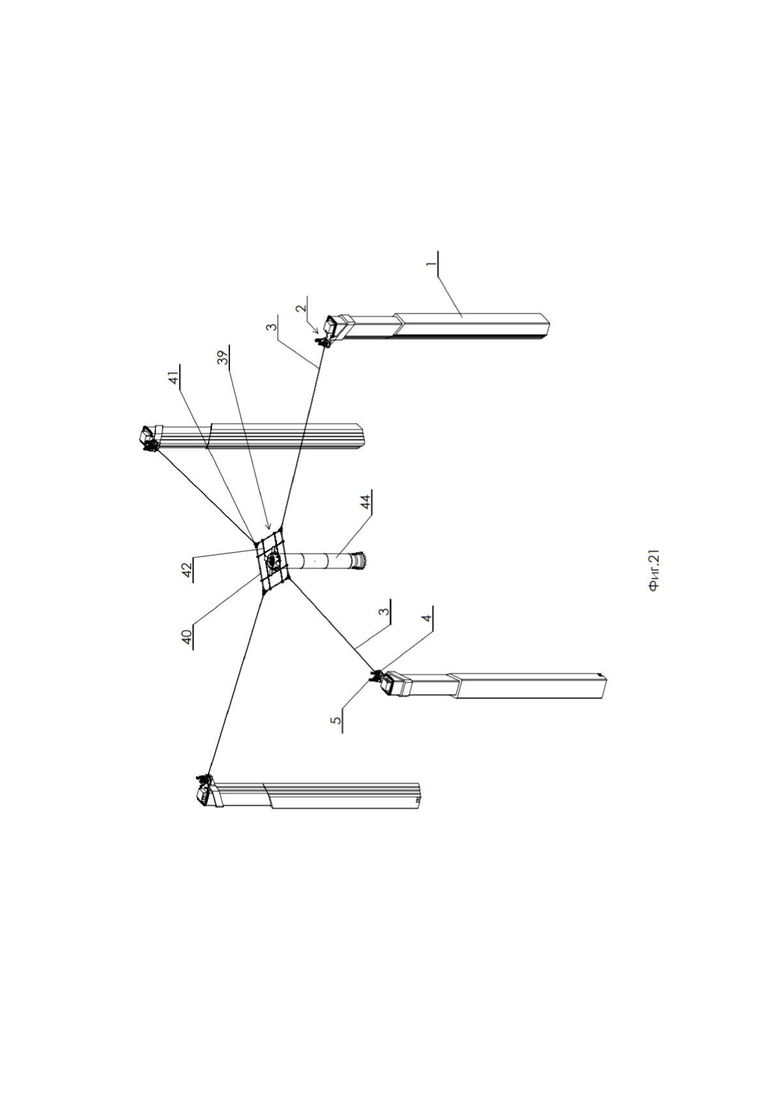
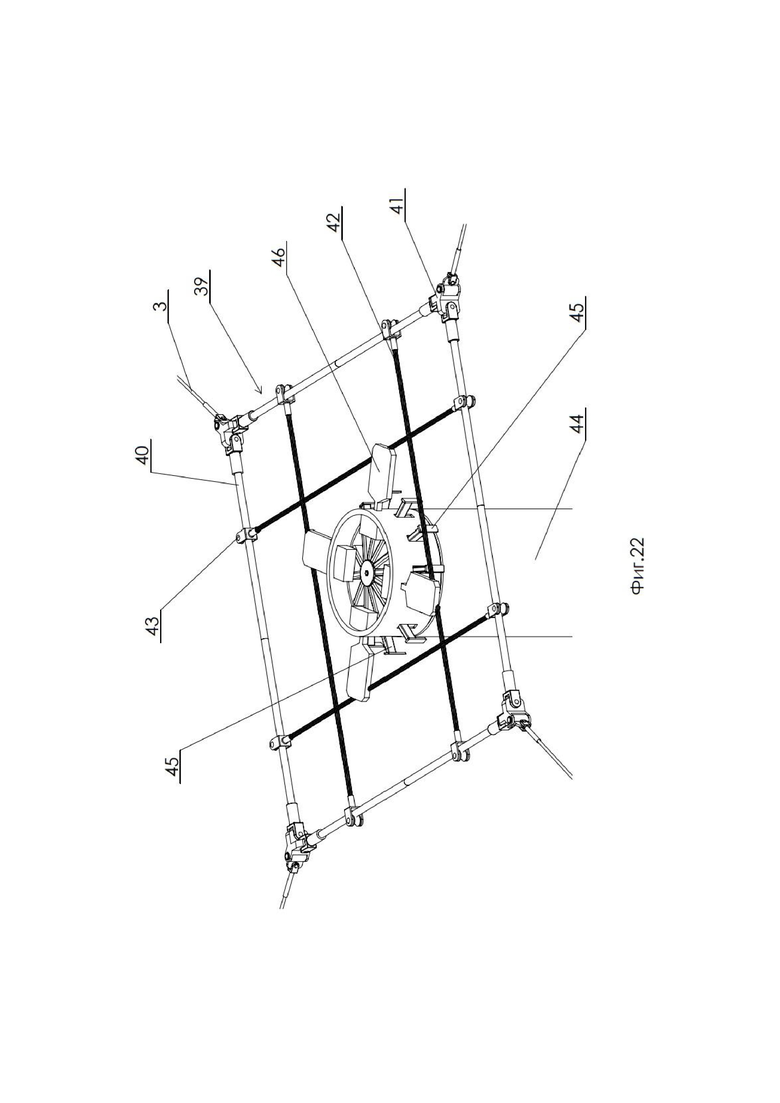
Четырёхлучевая четырехопорная станция, изображённая на фиг. 21-22, включает подвижные механизмы 2 перемещения канатов (тросов) 3. Механизмы 2 могут располагаться на горизонтальных площадках бетонных опор 1. Механизмы 2 представляют собой барабаны 4 с канатами (тросами) 3 и редукторами 5. Каждый канат 3 одним концом закреплён на раме ловушки 39, а другим концом намотан на барабан 4. Рама ловушки 39 представляет собой систему растяжек (тросов) 40, связанных с кронштейнами 41, на которых закреплены концы канатов 3. Ловушка 39 включает тросовую решётку, состоящую из системы перпендикулярно расположенных тросов 42, жёстко связанных с растяжками 40 посредством роликовых механизмов 43. Размеры образованных тросами 42 клеток значительно превышают размеры корпуса 44 космического корабля, но при смыкании тросов 42 становятся меньше внешних размеров зацепов 45 зонтичного типа и выдвигаемых лопастей 46.
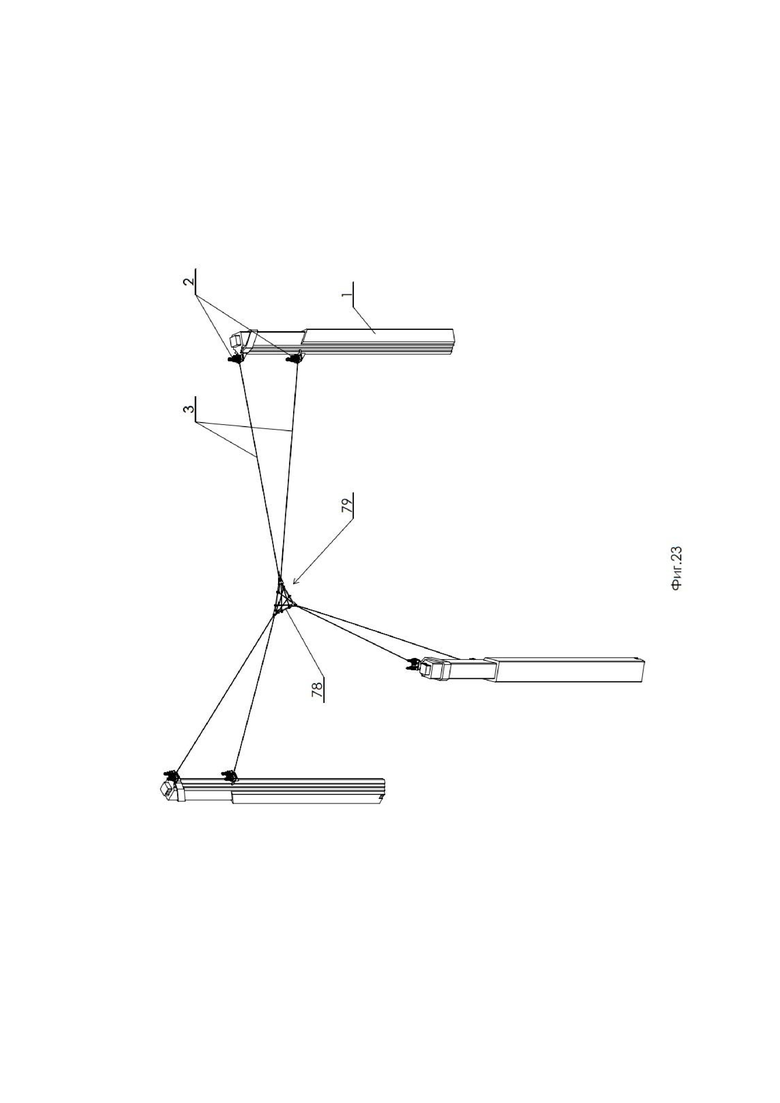
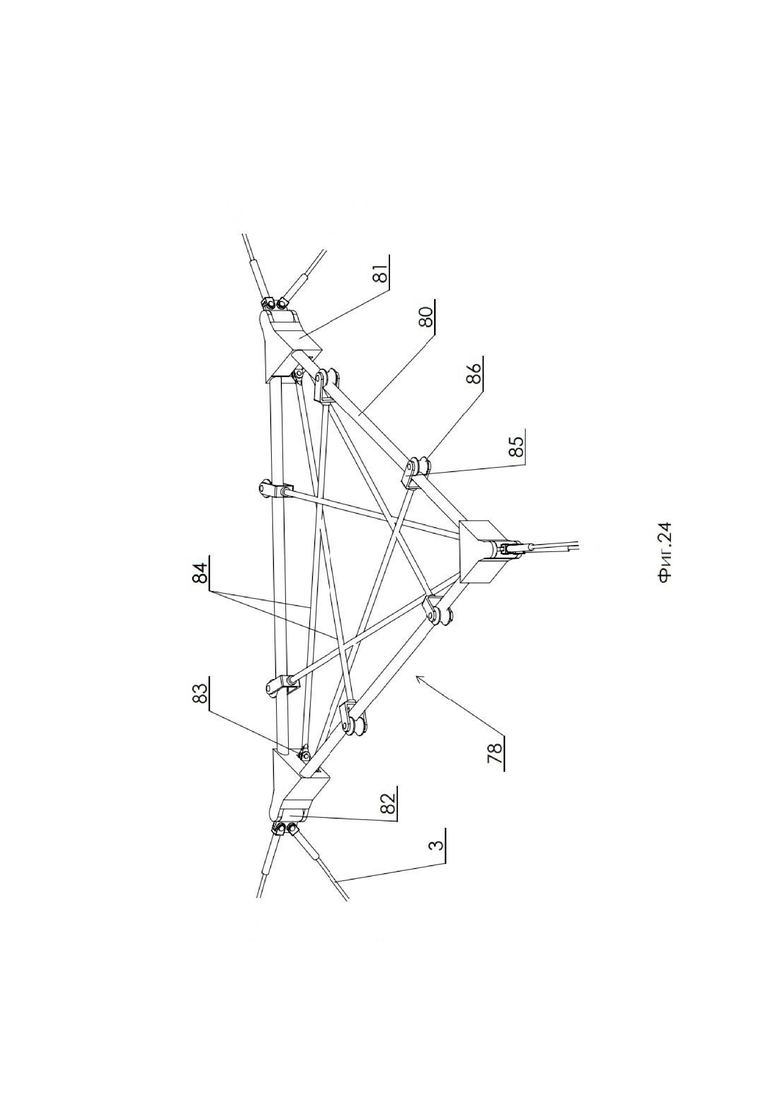
На фиг. 23 изображена шестилучевая трёхопорная станция обеспечения мягкой посадки космических кораблей, у которой на трёх бетонных опорах 1 расположены подвижные механизмы 2 перемещения шести канатов (тросов) 3, аналогичные изображённым на фиг. 2-4. Механизмы 2 установлены на горизонтальных площадках бетонных опор 1, расположенных попарно по высоте опоры 1. Механизмы 2 представляют собой барабаны 4 с канатами 3 и редукторами 5. Каждый канат 3 одним концом закреплён на раме 78 ловушки 79, а другим концом намотан на барабан 4. Ловушка 79, изображённая на фиг. 24, представляет собой конструкцию с треугольной рамкой 78, выполненной из трёх стяжек (тросов) 80, попарно жестко закреплённых в трех крепежных элементах (кронштейнах) 81, имеющих роликовые держатели 82 с внешней стороны для крепления канатов 3, и пазы 83 с внутренней стороны для крепления шести тросов 84 ловушки 79. Каждый трос 84, одним концом парно и поворотно закреплённый в пазах 83 элементов 81, на другом конце имеет роликовый механизм: вилку 85 с роликом 86 для перемещения вдоль стяжек 80.
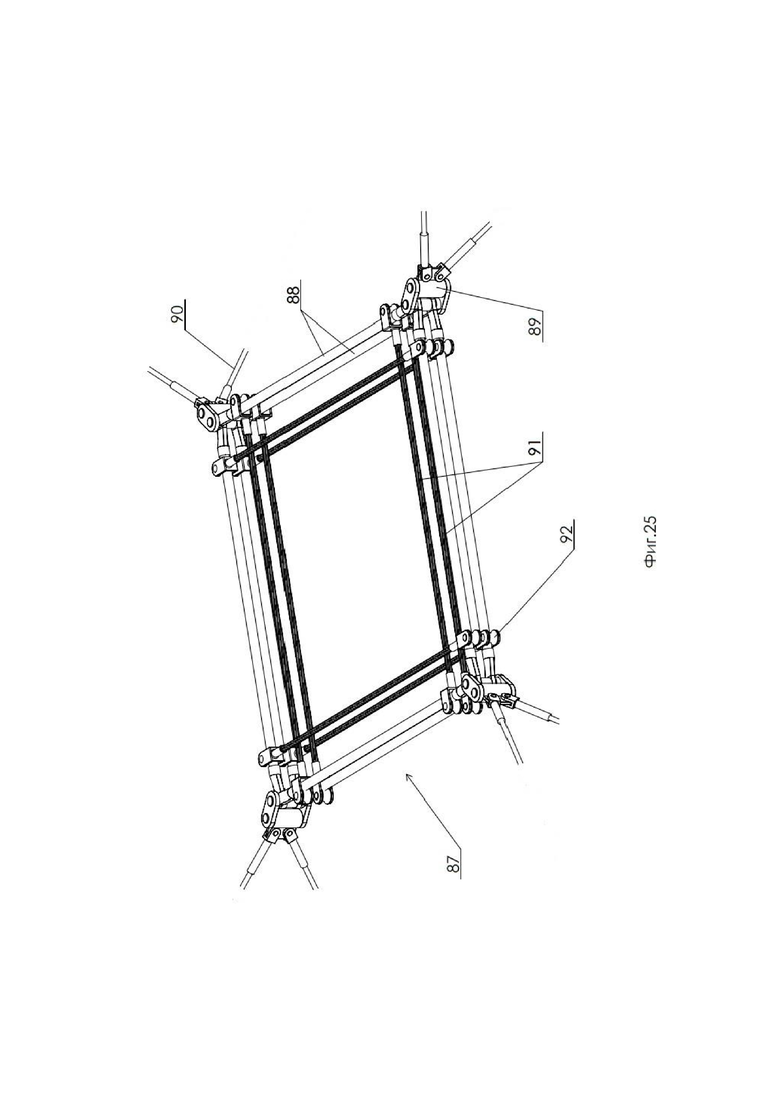
На фиг. 25 показана ловушка 87, выполненная на основе конструкции, изображённой на фиг. 22. Рамка ловушки 87 выполнена из сдвоенных растяжек 88, связанных с кронштейнами 89, на которых закреплены концы канатов 90. Ловушка 87 включает сдвоенную тросовую решётку, состоящую из системы перпендикулярно расположенных сдвоенных тросов 91, закреплённых на растяжках 88 посредством роликов 92.
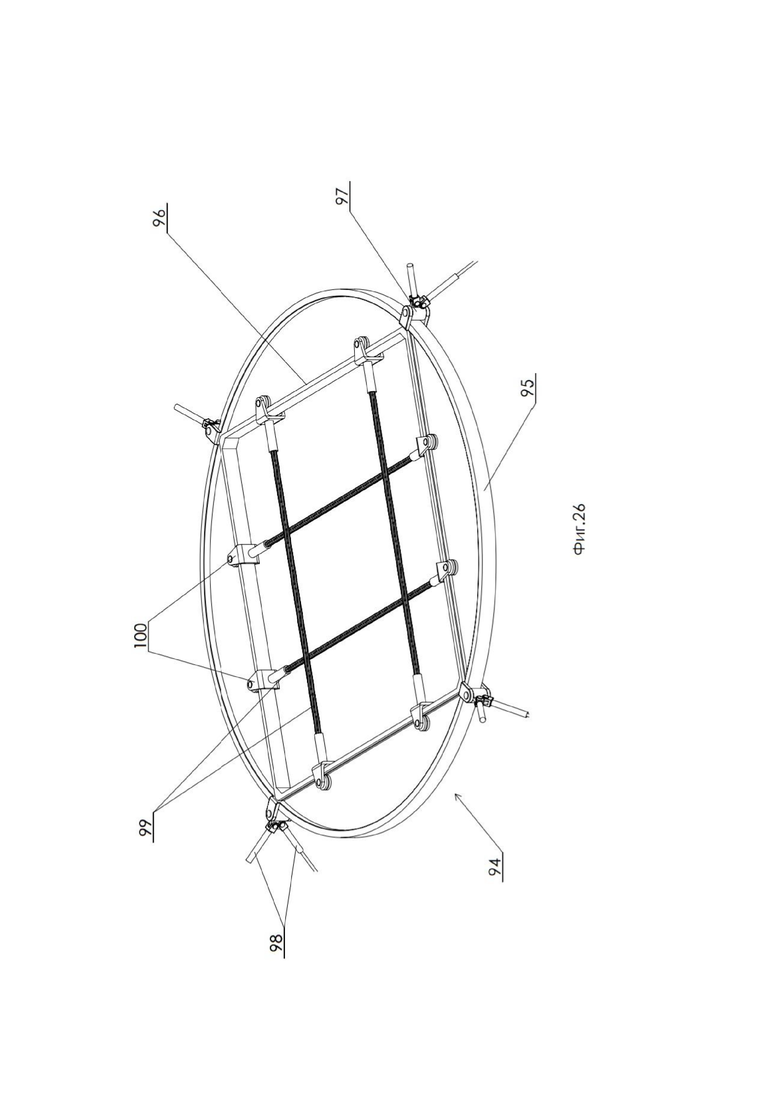
Ловушка 94, изображённая на фиг. 26, представляет собой жёсткую рамку 95, выполненную в виде кольца, в которую вписана и закреплена жёсткая рамка 96, выполненная либо квадратной, либо прямоугольной формы. Рамка 96 связана с рамкой 95 посредством роликовых механизмов 97, на которых закреплены тросы 98. Ловушка 94 включает тросовую решётку, состоящую из системы перпендикулярно расположенных тросов 99, закреплённых на рамке 96 посредством роликов 100.
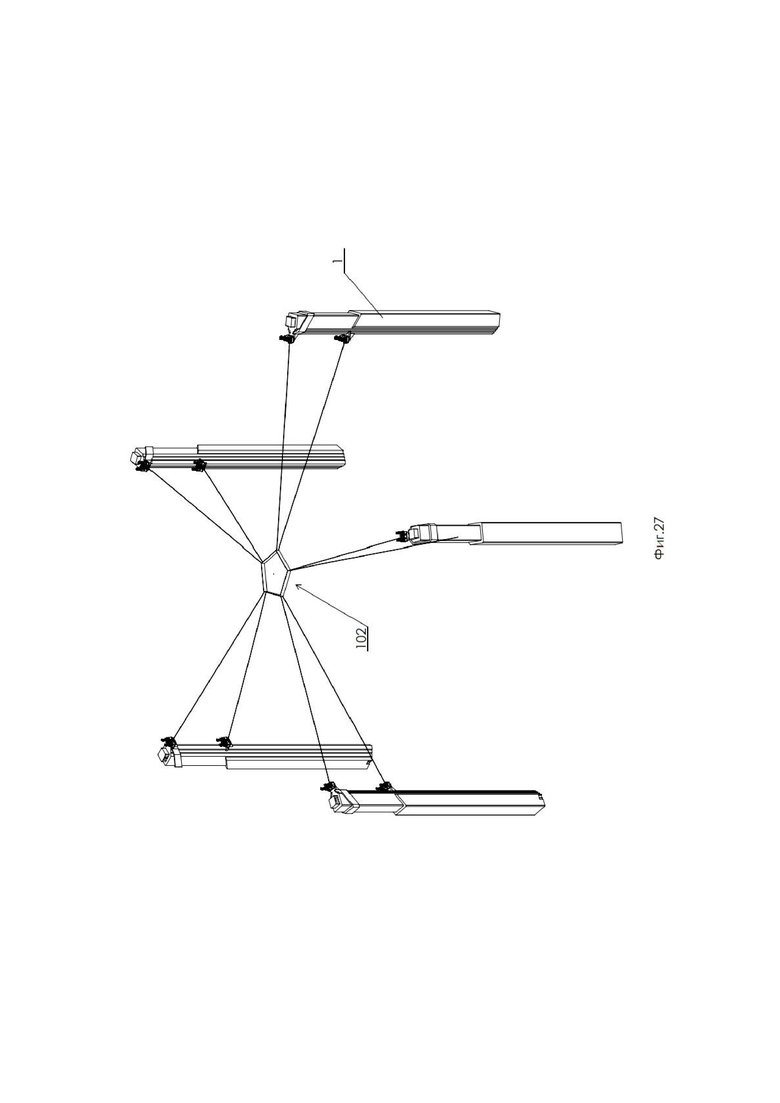
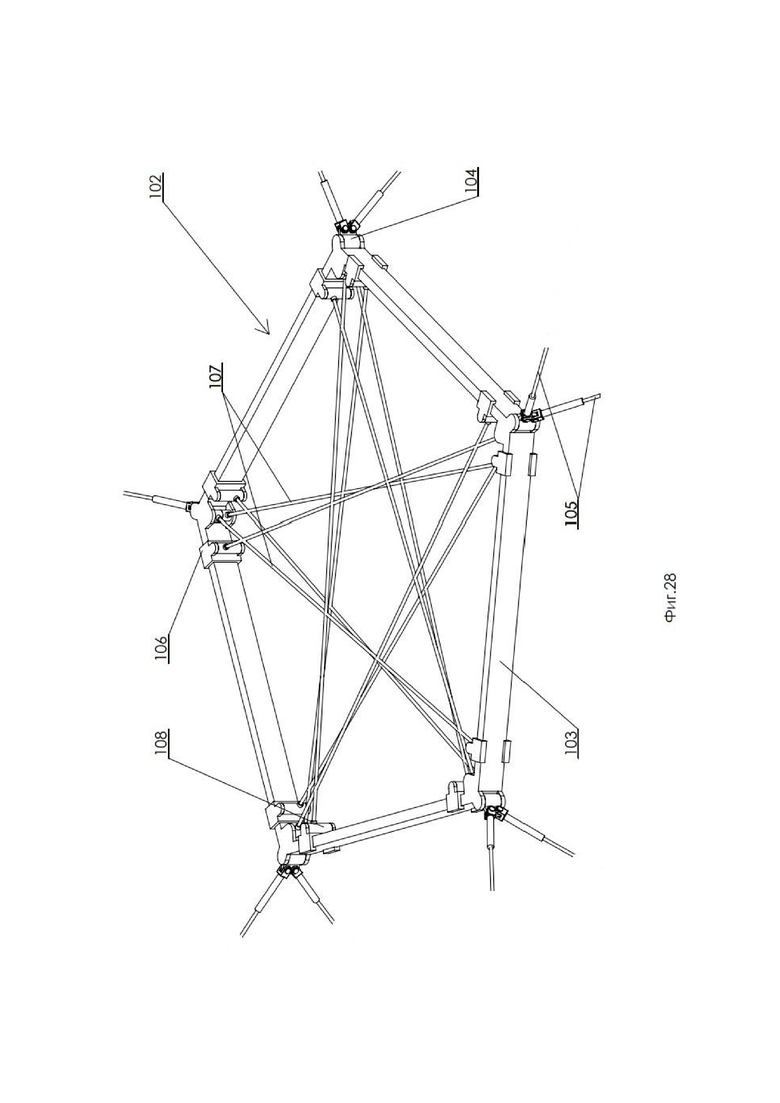
На фиг. 27 и 28 изображена десятилучевая пятиопорная станция с пятигранной тросовой ловушкой 102. Ловушка 102 имеет в своей основе пятигранную жёсткую рамку 103, с внешней стороны которой жёстко установлены кронштейны 104 канатов 105, а с внутренней стороны в углах жёстко закреплены держатели 106 тросов 107. Свободными концами тросы 107 связаны с роликами 108, имеющими возможность свободного перемещения вдоль рамки 103.
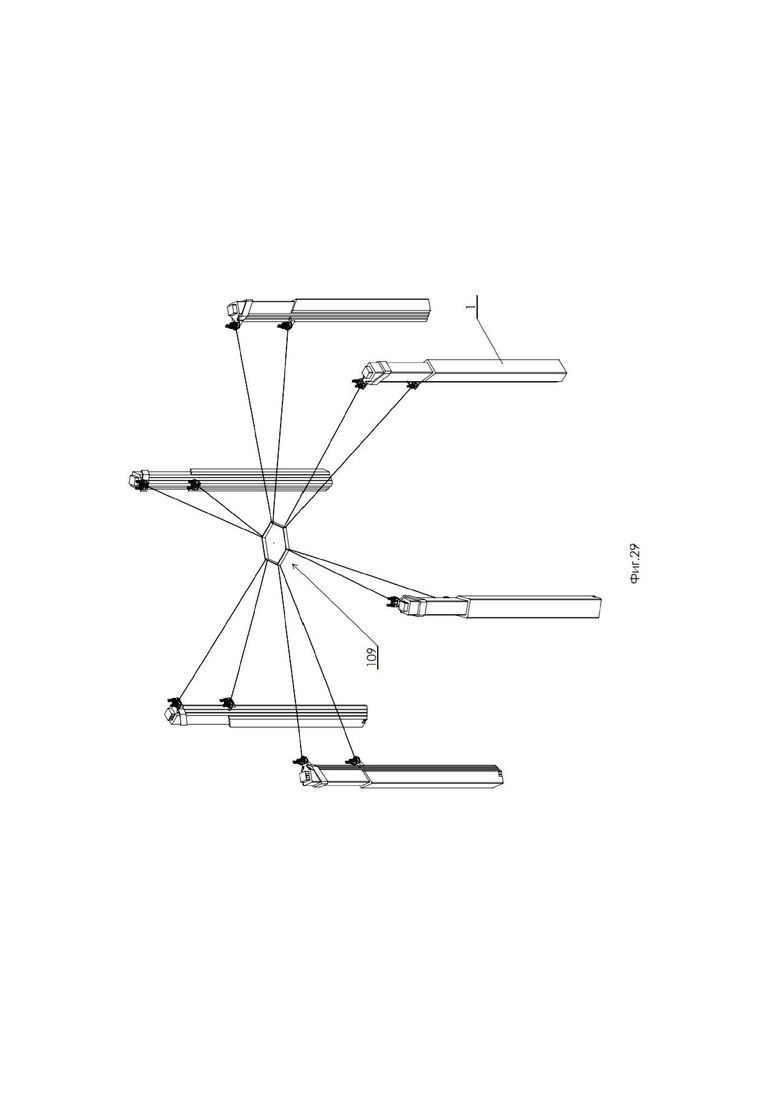
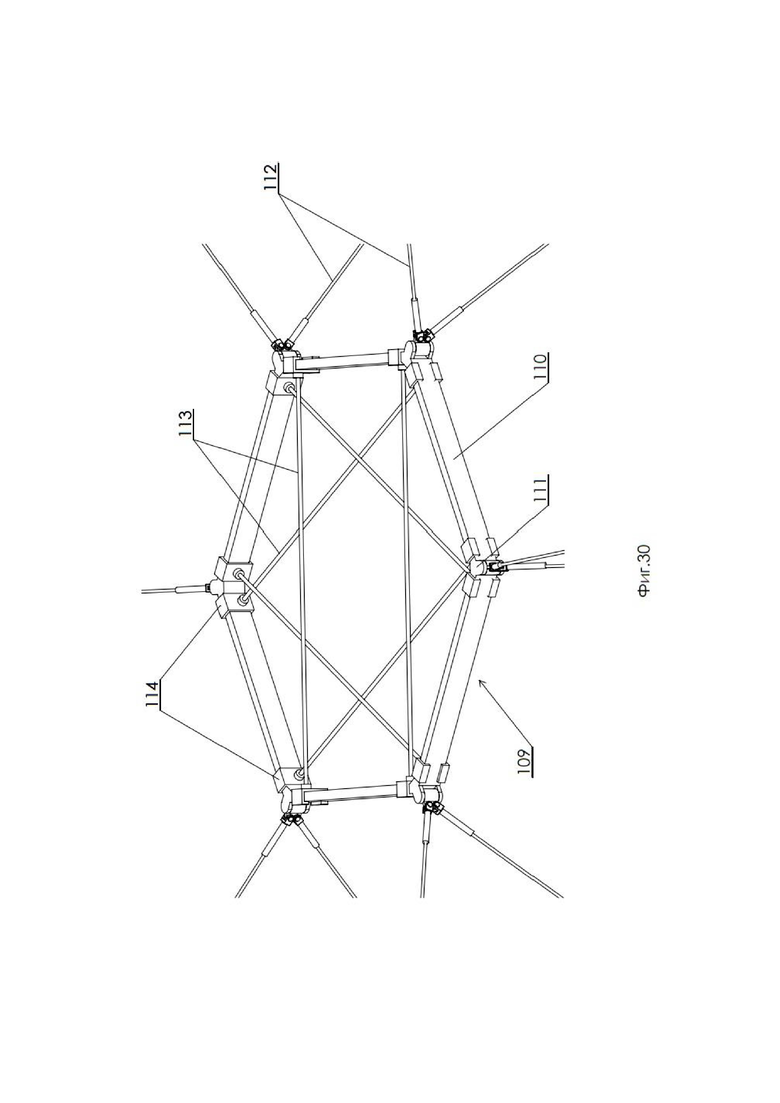
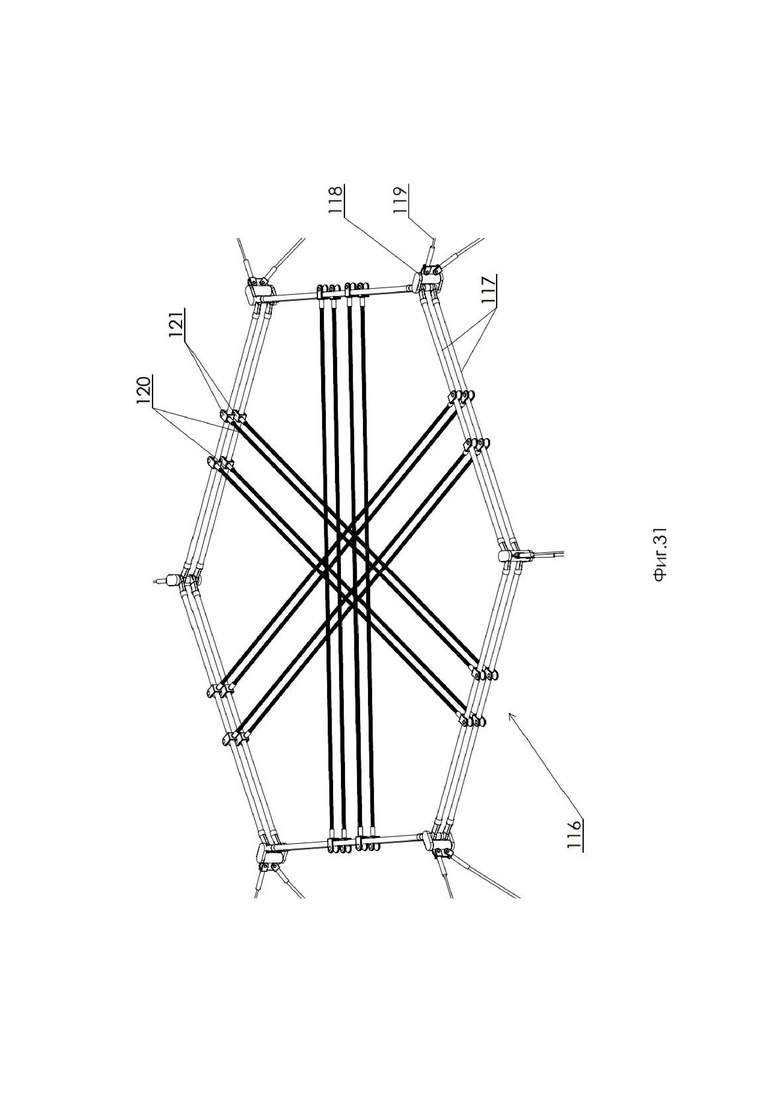
На фиг. 29 и 30 изображена двенадцатилучевая шестиопорная станция с шестигранной тросовой ловушкой 109. Ловушка 109 имеет в своей основе шестигранную жёсткую рамку 110, с внешней стороны которой жёстко установлены кронштейны 111 канатов 112. Шесть тросов 113 ловушки 109 натянуты между роликами 114, имеющими возможность свободного перемещения вдоль рамки 110. Ловушка 116 (см. фиг. 31) имеет в своей основе каркас, состоящий из парных растяжек 117, натянутых между кронштейнами 118, на внешней стороне которых закреплены канаты 119. Двенадцать внутренних тросов 120 попарно закреплены на роликах 121, имеющих возможность перемещения вдоль растяжек 117.
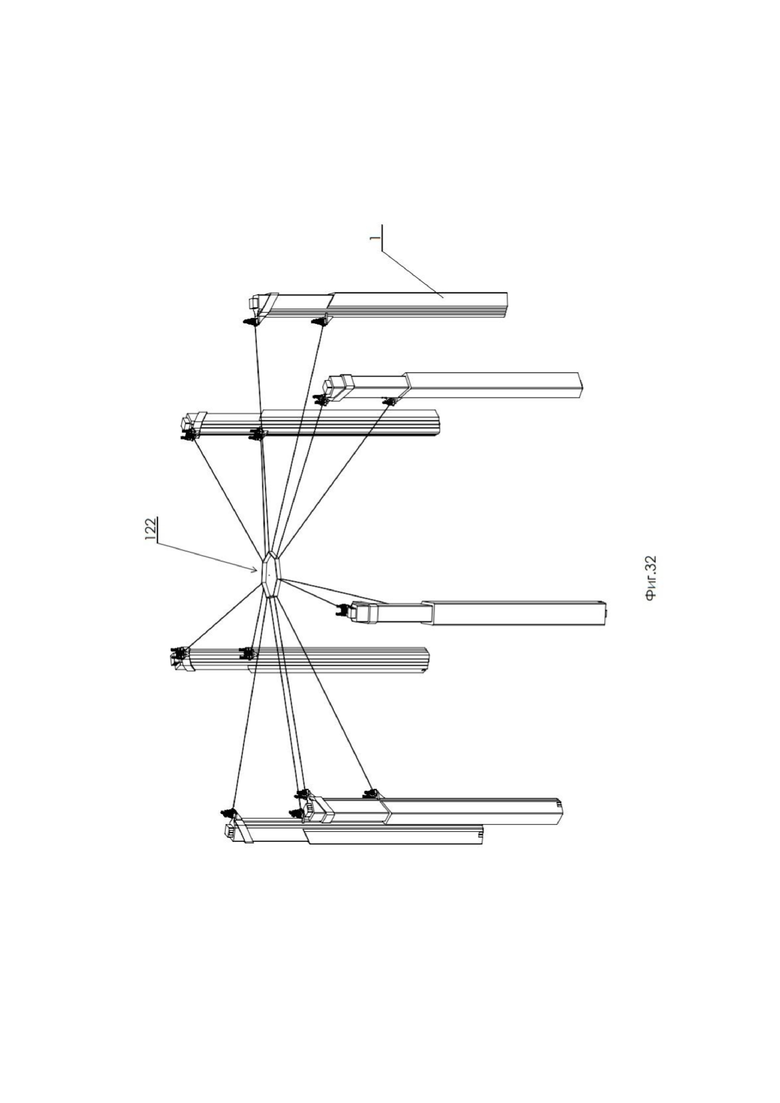
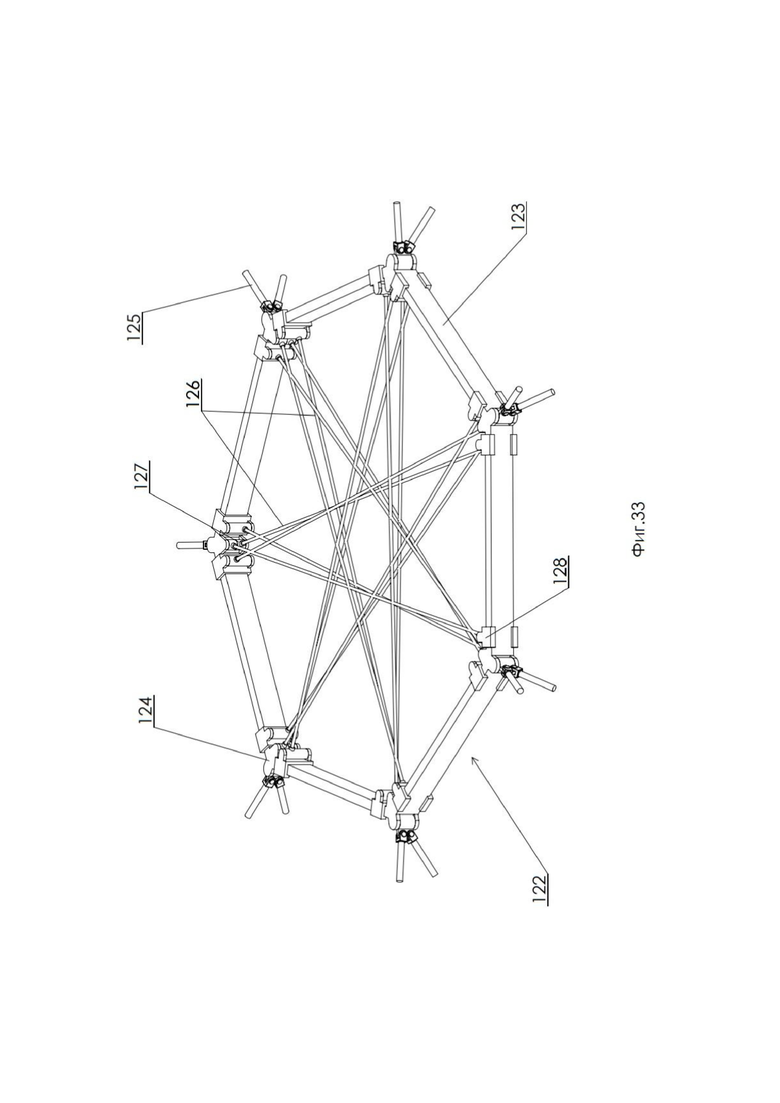
Изображённая на фиг. 32 четырнадцатилучевая семиопорная станция конструктивно аналогична изображенной на фиг. 29 двенадцатилучевой шестиопорной станции. А ловушка 122, изображённая на фиг. 33, имеет конструкцию, схожую с ловушкой 102 (см. фиг. 28). Отличие ловушки 122 заключается в том, что её каркас выполнен в виде жёсткой семигранной рамки 123, с внешней стороны которой жёстко установлены кронштейны 124 канатов 125, а четырнадцать внутренних тросов 126 одним концом закреплены на держателях 127 тросов 126, расположенных во внутренних углах рамки 123. Свободными концами тросы 126 связаны с роликами 128, имеющими возможность свободного перемещения вдоль рамы 123.
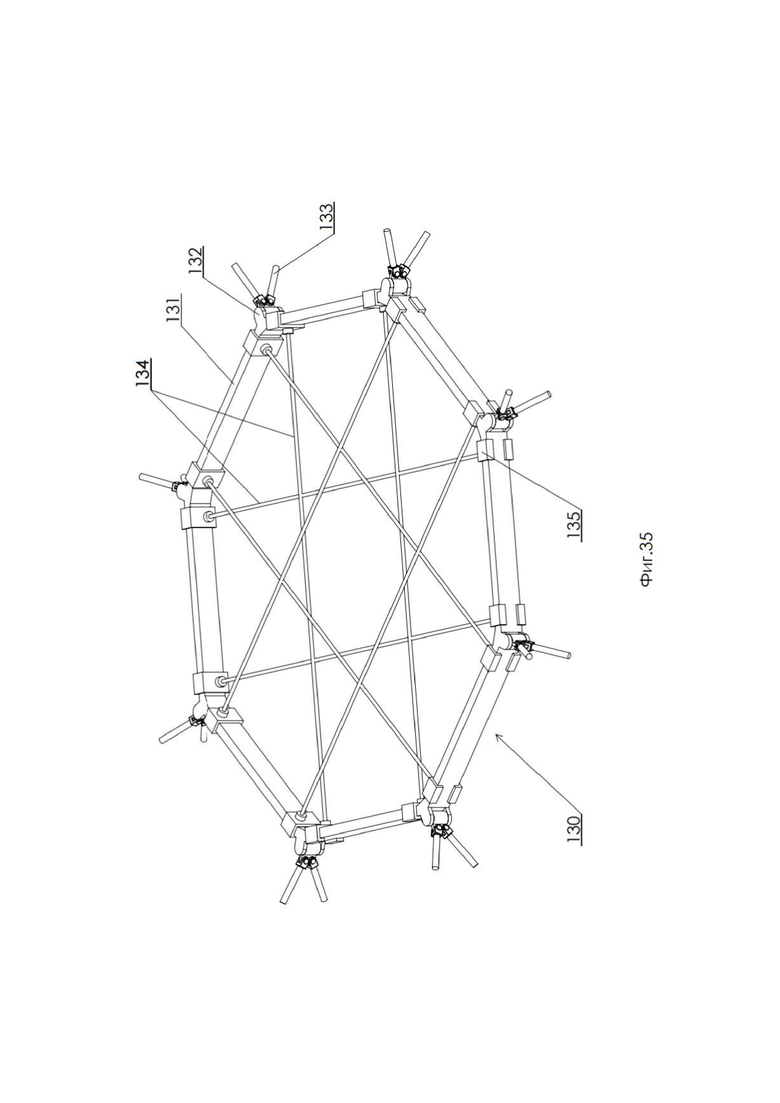
На фиг. 34 изображена шестнадцатилучевая восьмиопорная станция. Её конструкция аналогична изображённой на фиг. 29 двенадцатилучевой шестиопорной станции. Шестнадцатилучевая восьмиопорная станция образует ловушку 130 с жесткой восьмигранной рамкой 131, в углах которой на внешней стороне расположены кронштейны 132 канатов 133 (см. фиг. 350. Восемь тросов 134 ловушки 130 натянуты между роликами 135, имеющими возможность свободного перемещения вдоль рамки 131.
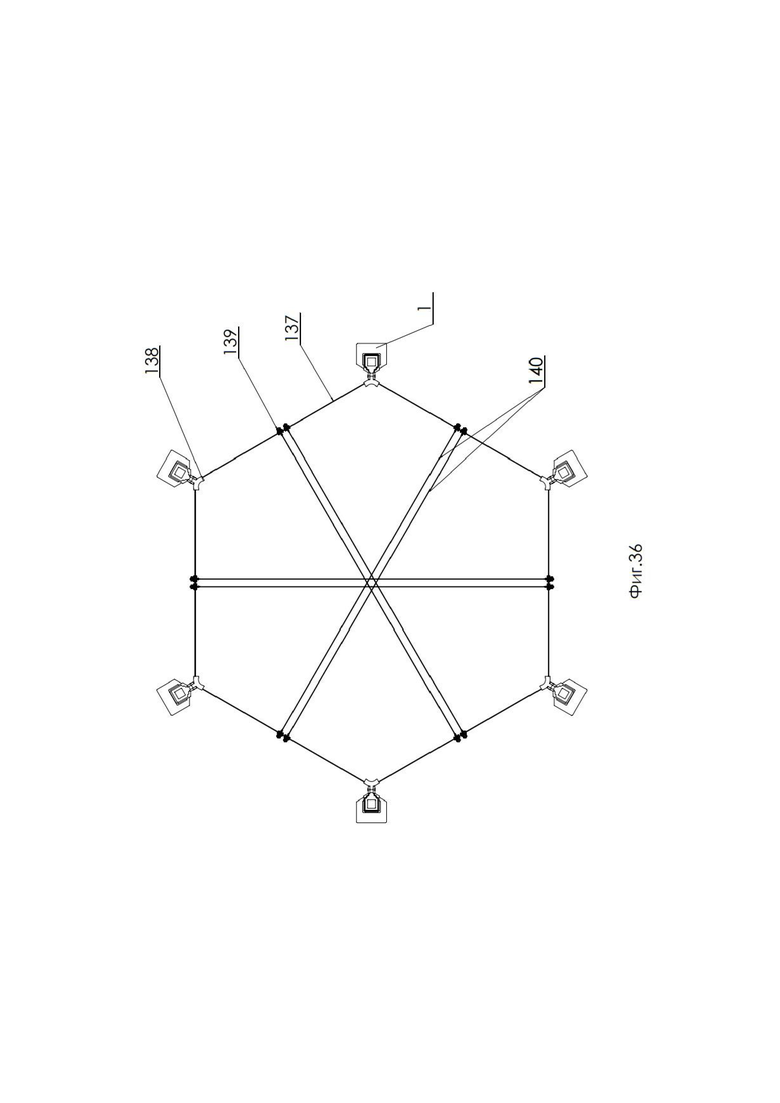
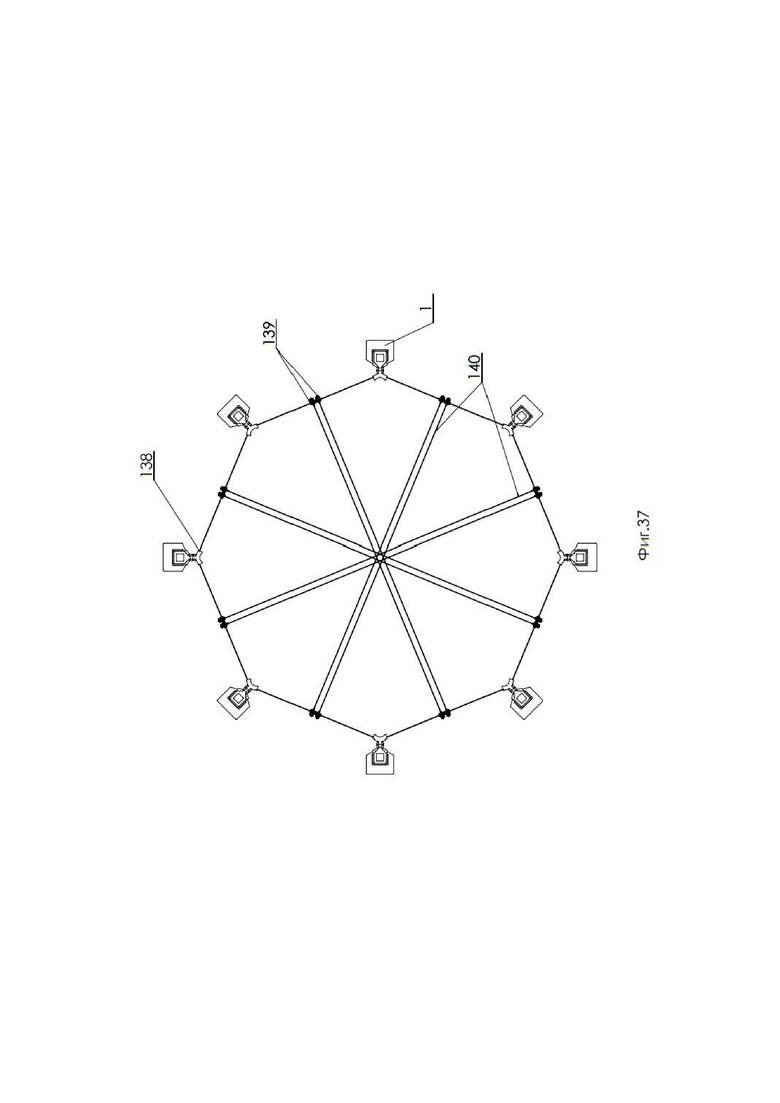
Изображённые на фиг. 36 – шестиопорная станция и на фиг. 37 – восьмиопорная станция лучевой формы имеют в основе ловушек каркас из тросовых растяжек 137, закрепленных на опорах 1 с помощью роликовых кронштейнов 138. На тросовых растяжках 137 подвешены подвижные каретки 139. На каждой каретке 139 закреплен канат (трос) 140 ловушек станций. Канаты 140 предназначены для улавливания (захватывания) космических кораблей, спускаемых в зону станции.
Важно отметить, что применение разной терминологии в данном техническом решении – «канаты», «тросы», «растяжки», «стяжки» связано с необходимостью облегчения восприятия описания. Канаты, тросы, растяжки, стяжки, которые использованы в конструкции станции обеспечения мягкой посадки космических кораблей, представляют собой очень прочные изделия из легких композитных и подобных материалов, обладающих высокой жёсткостью на растяжение и огнеупорными свойствами.
Станцию обеспечения мягкой посадки космических кораблей используют следующим образом. В основу работы станции положено использование канатных механизмов типа «параллельный робот», которые отличаются очень высоким быстродействием, значительно превышающим скорость опускания космического корабля с помощью тормозных двигателей, расположенных в его нижней торцевой зоне. С помощью электронной системы отслеживания и посадки космических кораблей управляют всеми механизмами станции, чётко синхронизируя движение механизмов, тросов, канатов, ловушек.
Изображенная на фиг. 1 станция обеспечения мягкой посадки космических кораблей представляет собой комплексную систему использования сразу четырёх уровней расположения ловушек. Первый уровень захватывания космических кораблей, показанный на примере восьмилучевой четырёхопорной системы, используют с накидной ловушкой 7, расположенной на канатах 3 бетонных опор 1 с подвижными механизмами 2 перемещения канатов 3. Каждый канат 3 одним концом закреплён на раме 6 ловушки 7, а другим концом намотан на барабан 4. Ловушка 7, изображенная на фиг. 5 и выполненная в виде рамы 6 круглой формы усиленного типа в виде концентрично расположенных колец 9 и 10, имеет тросы 12, расположенные внутри внутреннего кольца 10. Такая накидная ловушка 7 улавливает спускающийся космический корабль 13 за расположенный в его верхней зоне зацеп 14, который при контакте с тросами 12 ловушки 7 имеет возможность раскрываться, как зонтик. Причём эта ловушка 7 предназначена для накидывания сверху на опускающийся в зону приземления (станции обеспечения мягкой посадки) корабль 13 после того, как корабль опустится ниже натянутых тросов 12. Скорость срабатывания такой ловушки 7 значительно выше скорости опускания с помощью тормозных двигателей космического корабля. Захваченный за зацеп 14 корабль 13 плавно замедляет скорость опускания.
Если по каким-то причинам не сработал первый уровень, то на станции срабатывает второй уровень улавливания космических кораблей. Второй уровень захватывания космических кораблей расположен под первым уровнем на бетонных опорах 1 и представляет собой систему силовых тросов 21 с каретками 24, на каждой из которых закреплен канат 27 ловушки 28, предназначенной для улавливания (захватывания) космических кораблей, спускаемых в зону станции, за раскрываемые в верхней зоне космического корабля через его пазы 29 зацепы 30 типа «зонтик». Корабль 13, прошедший при спускании между канатами 27, выпускает зацепы 30, канаты 27, двигаясь на каретках 24, быстро смыкаются и прочно захватывают зацепы 30. Ловушка 28 плавно замедляет вертикальное опускание корабля 13.
Третий уровень улавливания космических кораблей, изображённый на фиг. 1 и представляющий собой установленный на опорах 1 жёсткий каркас 31, выполненный в виде фермы с параллельными поясами с каретками 33 канатов 36 ловушки 37, является дополнительной страховочной системой на случай неудачного срабатывания или поломки первого и второго уровня улавливания космических кораблей.
Четвёртый нижний уровень улавливания космических кораблей, изображённый на фиг. 1 в виде четырёхлучевой четырехопорной станции с подвижными механизмами 2 перемещения канатов 3, аналогичными механизмам 2 первого уровня, в которой каждый канат 3 одним концом закреплён на раме 38 ловушки 39, а другим концом намотан на барабан 4, а рама 38 ловушки 39 представляет собой систему растяжек 40, связанных с кронштейнами 41, на которых закреплены концы канатов 3. Ловушка 39 включает тросовую решётку, состоящую из системы перпендикулярно расположенных тросов 42, связанных с растяжками 40 посредством роликовых механизмов 43. Размеры образованных тросами 42 клеток незначительно превышают размеры корпуса 44 космического корабля, но значительно меньше размеров зацепов 45 зонтичного типа и выдвигаемых лопастей 46 (см. фиг. 22). Корабль, прошедший при опускании между тросами 42, выпускает зацепы 45 и раскрывает лопасти 46. Тросы 42, двигаясь на посредством роликовых механизмов 43, быстро смыкаются и прочно захватывают зацепы 45 и лопасти 46. Ловушка 39 плавно замедляет вертикальное опускание корабля. Её задача – мягко опустить космический корабль на расположенную внизу посадочную площадку 47 для его вертикальной фиксации. Площадка 47 также может быть выполнена подвижной посредством канатов 48, связанных с барабанами 49, оснащенными редукторами 50.
Станция обеспечения мягкой посадки космических кораблей обеспечивает мягкую посадку космических кораблей с включенными тормозными двигателями, которые сразу выключают после захватывания корабля ловушкой. При этом исключены: падения кораблей, взрывы, пожары, разрушения.
Изображённая на фиг. 2-5 станция обеспечения мягкой посадки космических кораблей, выполненная в виде восьмилучевой четырёхопорной системы, имеет конструкцию, которая похожа на первый уровень захватывания космических кораблей на фиг. 1. Такая станция может работать автономно, обеспечивая надежную посадку космических кораблей. Каждый канат 3 одним концом надёжно закреплён на раме 6 ловушки 7, а другим концом намотан на барабан 4. Движением канатов 3 ловушка 7 имеет возможность с огромной скоростью перемещаться между опорами 1, следуя командам электронной системы слежения станции (на рисунке не показано). Электронная система слежения улавливает даже незначительные колебания от вертикального движения космического корабля и мгновенно передает команду на механизмы 2, которые перемещают ловушку 7 в предполагаемую зону опускания. Площадь между опорами 1 настолько велика, чтобы обеспечить надежное приземление космического корабля при его отклонении от вертикального опускания в заданную системой управления корабля и ЦУПом (центром управления полетами) зону. Так как канатное (тросовое) устройство управления движением ловушки 7 обладает не только быстродействием, но и незначительным весом по сравнению с опорами 1, то нет никаких препятствий для её мгновенного перемещения на большие расстояния. Сеть ловушки 7, выполненная из тросов 12, расположенных внутри внутреннего кольца 10, предназначена для улавливания космического корабля 13 за расположенный в его верхней зоне зацеп 14, который при контакте с тросами 12 ловушки 7 имеет возможность раскрываться, как зонтик. Ловушка 7 предназначена для накидывания сверху на опускающийся в зону приземления (станции обеспечения мягкой посадки) корабль 13 после того, как корабль опустится ниже натянутых тросов 12. Скорость срабатывания такой ловушки 7 значительно выше скорости падения спускаемого космического корабля. Ловушка 7 плавно замедляет спускание космического корабля и мягко опускает его на площадку.
В четырёхопорной станции обеспечения мягкой посадки космических кораблей с силовой тросовой системой по верхнему периметру для перемещения кареток канатов 27 ловушки 28, изображённой на фиг. 6 – 10 с приводными моторами 22 (моторы позиционирования) ремней 23, последние приводят в движение каретки 24. Закреплённые на каретках 24 канаты 27 ловушки 28 предназначены для улавливания (захватывания) космических кораблей, спускаемых в зону станции, за раскрываемые в верхней зоне космического корабля через его пазы 29 зацепы 30 типа «зонтик».
Принцип срабатывания ловушек станций обеспечения мягкой посадки космических кораблей, изображённых на фиг. 11-20, а также на фиг. 36 и фиг. 37, не отличается от ловушки 28, изображённой на фиг. 6-10. Отличие этих станций заключаются в видоизменениях опорной и приводной конструкциях, которые описаны в разделах, посвященным описанию этих фигур. Ловушки, изображённые на фиг. 21-35, имеют дополнительные элементы – раму, в которой размещены подвижные тросы для захватывания спускаемого космического корабля. Так, например, рама ловушки 39, изображенной на фиг. 21 и 22, представляет собой систему растяжек 40, связанных с кронштейнами 41, на которых закреплены концы канатов 3. Ловушка 39 включает тросовую решётку, состоящую из системы перпендикулярно расположенных тросов 42, жёстко связанных с растяжками 40 посредством роликовых механизмов 43. Размеры образованных тросами 42 клеток значительно превышают размеры корпуса 44 космического корабля, но при смыкании тросов 42 становятся меньше размеров зацепов 45 зонтичного типа и выдвигаемых лопастей 46. Когда космический корабль с включенными тормозными двигателями опускается в зону приёма станции, тросы 42 предельно раздвинуты внутри рамы ловушки 39, а размеры самой рамы значительно больше его корпуса. Но при прохождении нижней зоны корабля мимо тросов 42 мгновенно срабатывает ловушка 39, тросы 42 смыкаются вокруг корпуса корабля и захватывают его за зацепов 45 и лопасти 46. Тормозные двигатели корабля выключают и далее плавно спускают его на канатах 3, растягивая их в длину до тех пор, пока корабль не коснётся посадочной площадки 47. Все рамные ловушки, изображённые на фиг. 21-35, срабатывают аналогичным образом, обеспечивая плавное, четкое и надежное спускание многоразового космического корабля.
Представленная станция обеспечения мягкой посадки космических кораблей оснащена очень важным узлом – тросовой (канатной) системой (которую в технике называют «параллельными роботами») с функцией сверхбыстрой ловушки приземляющегося космического корабля. Управляемые с помощью электронной системы отслеживания и посадки космических кораблей механические или гидравлические приводы канатной системы, кареток перемещения канатов и ловушек обеспечивают высокую точность улавливания спускаемых многоразовых космических кораблей. При срабатывании ловушки на спускаемом вниз тросами (канатами) корабле автоматическая система управления выключает тормозные двигатели, что позволяет полностью исключить термические повреждения корабля от пламени двигателей, ударной волны, разрушение посадочной площадки и её инфраструктуры. Важно отметить, что вертикальные размеры станции значительно превышают размеры корпуса космического корабля для обеспечения его безопасного улавливания и спуска.
Таким образом, технический результат, достигаемый с использованием заявленного изобретения, заключается в повышения безопасности посадки многоразового космического корабля, многократном увеличении срока службы космического корабля, исключении механического повреждения от жёсткого приземления и ударной волны, исключении попадания космического корабля под пламя собственного факела, отраженного от посадочной площадки, что приводит к значительным повреждениям от высоких температур работающих двигателей, пожароопасной обстановки и разрушения корабля и инфраструктуры.







Группа изобретений относится к посадочным системам многоразовых космических кораблей (МКК), главным образом ступеней ракет-носителей. Предлагаемая система содержит стационарные опоры, связанные направляющими, и тросовую систему улавливания МКК с быстро перемещаемой ловушкой. Ловушка выполнена в виде рамки с жестко натянутыми внутри нее тросами, образующими улавливающие ячейки, и закреплена на внутренних концах тросов. Механизмы перемещения тросов попарно закреплены на опорах один над другим. Система улавливания выполнена преимущественно многоуровневой. Технический результат состоит в повышении надежности и безопасности посадки МКК, улучшении эксплуатационных качеств и срока службы наземной инфраструктуры. 5 н. и 7 з.п. ф-лы, 37 ил.
1. Станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, отличающаяся тем, что ловушка выполнена накидной в виде подвижно установленной на внутренних концах тросов рамки с жестко натянутыми внутри тросами, образующими улавливающие ячейки, а механизмы перемещения тросов ловушки попарно закреплены на стационарных опорах один над другим и выполнены в виде приводов с механизмами торможения.
2. Станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, отличающаяся тем, что ловушка выполнена в виде подвижно установленной на тросах рамки с подвижно установленными внутри рамки тросами, образующими улавливающие ячейки, при этом механизмы перемещения тросов ловушки закреплены на стационарных опорах, выполнены в виде привода с механизмами торможения, а механизмы перемещения тросов внутри рамки ловушки закреплены на кронштейнах рамки и выполнены в виде дополнительных приводов перемещения с механизмами торможения.
3. Станция по п. 2, отличающаяся тем, что рамка ловушки выполнена из жестко закрепленных на кронштейнах тросов, а расположенные внутри рамки тросы выполнены подвижными и снабжены роликовыми механизмами, расположенными с противоположных концов этих тросов с возможностью перемещения вдоль рамки, и связанными с дополнительными приводами перемещения, расположенными на кронштейнах рамки.
4. Станция по п. 2, отличающаяся тем, что рамка ловушки выполнена из жестко закрепленных на кронштейнах тросов, а расположенные внутри рамки тросы выполнены подвижными, снабжены роликовыми механизмами с одного конца с возможностью перемещения вдоль рамки и связаны с дополнительными приводами перемещения, при этом противоположные концы тросов рамки установлены поворотно на кронштейнах рамки.
5. Станция по п. 2, отличающаяся тем, что рамка ловушки выполнена из парных жестко закрепленных на кронштейнах тросов, а расположенные внутри рамки парные тросы выполнены подвижными и снабжены роликовыми механизмами с возможностью перемещения вдоль рамки, расположенными с противоположных концов этих тросов, и связанными с дополнительными приводами перемещения, расположенными на кронштейнах рамки.
6. Станция по п. 2, отличающаяся тем, что рамка ловушки выполнена жесткой, а расположенные внутри рамки тросы выполнены подвижными и снабжены роликовыми механизмами с возможностью перемещения вдоль рамки, расположенными с противоположных концов этих тросов, и связанными с дополнительными приводами перемещения, расположенными на кронштейнах рамки.
7. Станция по п. 2, отличающаяся тем, что рамка ловушки выполнена жесткой, а расположенные внутри рамки тросы выполнены подвижными, снабжены роликовыми механизмами с одного конца с возможностью перемещения вдоль рамки и связаны с дополнительными приводами перемещения, при этом противоположные концы тросов рамки установлены поворотно на кронштейнах рамки.
8. Станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, отличающаяся тем, что направляющие, связывающие стационарные опоры, выполнены в виде верхнего контура силовых тросов, установленных на роликовых блоках, закрепленных на стационарных опорах и снабженных парными каретками с возможностью перемещения посредством приводов с механизмами перемещения и торможения, при этом парные тросы, размещенные внутри направляющих и закрепленные на каретках с возможностью перемещения относительно силовых тросов, представляют собой ловушку, образующую при сдвигании друг к другу улавливающую квадратную ячейку, причем механизмы перемещения кареток ловушки закреплены на стационарных опорах, а механизмы растяжения тросов ловушки установлены на каретках и выполнены в виде приводов с механизмами растяжения и торможения.
9. Станция по п. 8, отличающаяся тем, что она снабжена нижним контуром с направляющими для перемещения кареток, предназначенных для размещения приводов с механизмами синхронизации, растяжения и торможения тросов ловушки, установленных на каретках верхнего контура силовых тросов.
10. Станция по п. 8, отличающаяся тем, что она снабжена нижним контуром с направляющими рейками для горизонтального перемещения кареток тормозных гидроцилиндров, связанных с тросами ловушки, установленными на каретках верхнего контура силовых тросов.
11. Станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, отличающаяся тем, что направляющие, связывающие стационарные опоры, размещены на парных верхних жестких контурах, закрепленных на стационарных опорах один под другим, при этом каждая направляющая снабжена парными каретками с возможностью перемещения посредством приводов с механизмами перемещения и торможения тросов, представляющих собой ловушки, размещённые одна под другой и образующие при сдвигании друг к другу улавливающую квадратную ячейку, причем механизмы перемещения кареток ловушки закреплены на стационарных опорах, а механизмы растяжения тросов ловушки установлены на каретках и выполнены в виде приводов с механизмами растяжения и торможения.
12. Станция обеспечения мягкой посадки космических кораблей, включающая посадочную платформу для приема ракет с вертикальным приземлением, по периметру которой установлены стационарные опоры, связанные направляющими, тросовую систему улавливания ракет с ловушкой и механизмами перемещения тросов вдоль направляющих, электронную систему позиционирования спускаемого корабля и управления посадкой, отличающаяся тем, что она выполнена многоуровневой, при этом ловушка первого уровня выполнена накидной в виде подвижно установленной на внутренних концах тросов рамки с жестко натянутыми внутри тросами, образующими улавливающие ячейки, а механизмы перемещения тросов ловушки попарно закреплены на стационарных опорах один над другим и выполнены в виде приводов с механизмами торможения, а направляющие второго уровня, связывающие стационарные опоры, размещены под первым уровнем и выполнены в виде верхнего контура силовых тросов, установленных на роликовых блоках, закрепленных на стационарных опорах и снабженных парными каретками с возможностью перемещения посредством приводов с механизмами перемещения и торможения, при этом парные тросы, размещенные внутри направляющих и закрепленные на каретках с возможностью перемещения относительно силовых тросов, представляют собой ловушку, образующую при сдвигании друг к другу улавливающую квадратную ячейку, причем механизмы перемещения кареток ловушки закреплены на стационарных опорах, а механизмы растяжения тросов ловушки установлены на каретках и выполнены в виде приводов с механизмами растяжения и торможения, при этом направляющие третьего уровня размещены на жестких контурах, расположенных под вторым уровнем, при этом каждая направляющая снабжена парными каретками с возможностью перемещения посредством приводов с механизмами перемещения и торможения тросов, представляющих собой ловушки, образующие при сдвигании друг к другу улавливающую квадратную ячейку, причем механизмы перемещения кареток ловушки закреплены на стационарных опорах, а механизмы растяжения тросов ловушки установлены на каретках и выполнены в виде приводов с механизмами растяжения и торможения, а ловушка четвертого уровня выполнена в виде подвижно установленной на тросах рамки с подвижно установленными внутри рамки тросами, образующими улавливающие ячейки, при этом механизмы перемещения тросов ловушки закреплены на стационарных опорах, выполнены в виде привода с механизмами торможения, а механизмы перемещения тросов внутри рамки ловушки закреплены на кронштейнах рамки и выполнены в виде дополнительных приводов перемещения с механизмами торможения, при этом посадочная площадка снабжена подвижной опорой посредством тросов, связанных с механизмами перемещения и торможения тросов.
| Huan Zhang, Zhihua Zhao, et al., Arresting-Cable System for Robust Terminal Landing of Reusable Rockets | |||
| Journal of Spacecraft and Rockets | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТЕЧЕНИЯ ВОДЫ И ОДНОВРЕМЕННОГО ПОЛУЧЕНИЯ ПРОБ ЕЕ | 1925 |
|
SU425A1 |
| Устройство для посадки возвращаемой ступени ракеты-носителя | 2020 |
|
RU2740525C1 |
| US 5667167 A, 16.09.1997 | |||
| Металлоконструкция для остеосинтеза костей | 1986 |
|
SU1637769A1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОСМИЧЕСКИЙ АППАРАТ | 1998 |
|
RU2131383C1 |

