Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к улучшенному приемнику спутниковой системы уточнения (SBAS), а более конкретно к улучшенному приемнику европейской геостационарной службы навигационного покрытия (EGNOS).
Уровень техники
Как известно, глобальная система позиционирования (GPS) является международной радионавигационной системой, сформированной посредством совокупности спутников и соответствующих наземных станций. Каждый спутник непрерывно широковещательно передает свое местоположение в космосе наряду со временем передачи из внутреннего синхросигнала. GPS-приемники могут определять свое положение посредством приема и анализа сигналов, передаваемых от GPS-спутников.
В частности, для каждого сигнала от GPS-спутника, GPS-приемник вычисляет разность между временем передачи и временем, в которое сигнал принят, и затем, с допущением, что скорость распространения GPS-сигнала известна, вычисляет свое расстояние от GPS-спутника на основе этой разности. Это расстояние называется псевдодальностью. GPS-приемник определяет свое местоположение посредством выполнения геометрической триангуляции для псевдодальностей относительно нескольких GPS-спутников. Двумерные местоположения могут определяться посредством использования псевдодальностей относительно трех GPS-спутников, и трехмерные местоположения могут определяться посредством использования псевдодальностей относительно четырех или более GPS-спутников.
Хотя современная GPS успешно применяется, она имеет несколько недостатков, которые влияют на точность расчетов позиционирования. Фактически, сигналы GPS-спутника подвержены ошибкам, вызываемым посредством ионосферных и тропосферных возмущений, уходов синхросигналов спутников и расхождений орбит спутников. Например, ионосферное и тропосферное преломление может замедлять спутниковые сигналы и приводить к тому, что несущие сигналы и коды расходятся. Поскольку ионосферные возмущения сильно отличаются от местоположения к местоположению, эти ошибки трудно корректировать с помощью GPS-приемников гражданского типа.
Эти недостатки делают GPS, по сути, не подходящей для использования в критических с точки зрения безопасности услугах, таких как аэронавигация. Фактически, например, на GPS-сигнал оказывают слишком сильное влияние ошибки и неопределенность, чтобы удовлетворять обязательным требованиям по точности в авиации.
По этой причине в последнее время разрабатываются различные технологии уточнения GPS, т.е. технологии, ориентированные на то, чтобы улучшать точность, надежность, доступность и целостность GPS через интеграцию внешней информации в процесс расчета.
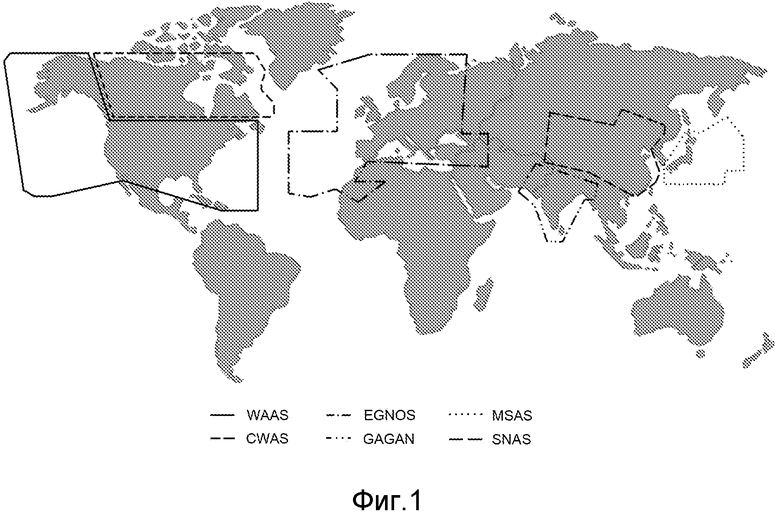
В частности, спутниковая система уточнения (SBAS) является системой, которая поддерживает глобальное или региональное уточнение и коррекцию с помощью дополнительных спутниковых широковещательных сообщений. Примерами SBAS являются глобальная система уточнения (WAAS), разрабатываемая в США Федеральным управлением гражданской авиации (FAA), европейская геостационарная служба навигационного покрытия (EGNOS), разрабатываемая в Европе Европейским космическим агентством (ESA), Европейской комиссией и EUROCONTROL, и японская многофункциональная спутниковая система уточнения (MSAS). Фиг.1 схематично показывает местоположения нескольких SBAS, создаваемых в мире.
Документ радиотехнической комиссии по аэронавтике (RTCA) номер DO-229D, называемый "Minimum Operational Performance Standards (MOPS) for Global Positioning System/Wide Area Augmentation System Airborne Equipment" (Стандарты минимальных рабочих характеристик (MOPS) для бортового оборудования глобальной системы позиционирования/глобальной системы уточнения) и подготовленный посредством специального комитета 159 RTCA заключает в себе стандарты минимальных рабочих характеристик (MOPS) для бортового навигационного оборудования (двумерного и трехмерного) с использованием GPS, уточненной посредством WAAS, и представляет собой международный стандарт SBAS, который должен применяться всеми правительственными учреждениями. Таким образом, все поставщики SBAS-услуг должны обеспечивать совместимость сигналов и функциональную совместимость систем, тем самым способствуя по-настоящему прозрачной всемирной навигационной услуге.
В частности, приемник, совместимый с RTCA/DO-229D MOPS, должен работать с любой SBAS, т.е. WAAS, EGNOS, MSAS и т.д.
Подробно, SBAS улучшают характеристики GPS с целью сделать ее подходящей для использования в критических с точки зрения безопасности услугах, таких как аэронавигация. Это выполняется посредством предоставления, посредством отдельных сигналов, набора корректировок, которые улучшают точность расчета положения, выполняемого посредством пользовательского спутникового приемника. В частности, EGNOS предоставляет эти корректировки не только для GPS, но также и для глобальной навигационной спутниковой системы (GLONASS).
Вообще говоря, SBAS основана на принципе пространственной и временной корреляции ошибок измерения, которые возникают при проведении измерения расстояния из запущенного в космосе источника. Разность между теоретическим и реальным измерением, выполняемым в известном положении, может быть обнаружена, с аналогичными значениями, в других реальных измерениях, выполняемых рядом с известным положением. Другими словами, этот принцип означает, что на измерения расстояния, проводимые в небольшой географической области, могут оказывать влияние идентичные ошибки. Таким образом, когда известна ошибка измерения в одном месте, она может использоваться в качестве корректировки для измерений расстояния, проводимых в близлежащих местах. В сценарии, в котором являются доступными несколько опорных точек, может быть выведен закон глобальной корреляции, который моделирует разность при измерениях расстояния. Эти данные, собираемые посредством сети опорных станций, обрабатываются и затем передаются пользователям посредством геостационарных спутников в сигнале, имеющем частоту, идентичную с GPS (L1=1575,42 МГц), и другой формат данных. SBAS-сообщения заключают в себе информацию для вычисления корректировок псевдодальности, а также параметры целостности данных, используемые для того, чтобы оценивать степень уверенности в вычислении положения.
Информация, заключенная в навигационном сообщении, модулируемом на L1, дополнительная возможность измерения дальности, предлагаемая посредством геостационарных спутников, и комплексность наземной обработки и проверок позволяют улучшать точность, целостность и надежность GPS.
Как описано выше и аналогично всем SBAS, EGNOS предназначена, чтобы удовлетворять высоким требованиям по эффективности для аэронавигации, в частности соображениям касательно посадки самолетов:
- точность должна улучшаться приблизительно до 2-4 метров по вертикали и 1-3 метров по горизонтали через широковещательную передачу глобальных дифференциальных (WAD) корректировок;
- целостность (безопасность) должна улучшаться как через высокую кратность резервирования в системе, так и посредством оповещения пользователей в течение 6 секунд, если возникает некоторое ухудшение точности в системе, с помощью EGNOS, GPS или GLONASS;
- непрерывность должна улучшаться, чтобы поддерживать работу системы в течение следующих 150 секунд с начала любой намеченной операции; и
- доступность должна улучшаться посредством широковещательной передачи имитирующих GPS сигналов от геостационарных спутников.
Измерения EGNOS уже подтверждают, что точность должна составлять порядка 2-4 метров по вертикали и 1-3 метров по горизонтали в области Европейской конференции по вопросам гражданской авиации (ECAC).
Более подробно, EGNOS предоставляет всеевропейскую, стандартизированную систему позиционирования с гарантированным качеством, подходящую для широкого диапазона применений. Она имеет высокую степень совместимости с GPS, так что одна антенна и приемник могут обрабатывать как GPS-, так и EGNOS-сигналы, исключая потребность в отдельном радиомодуле для того, чтобы принимать корректировки.
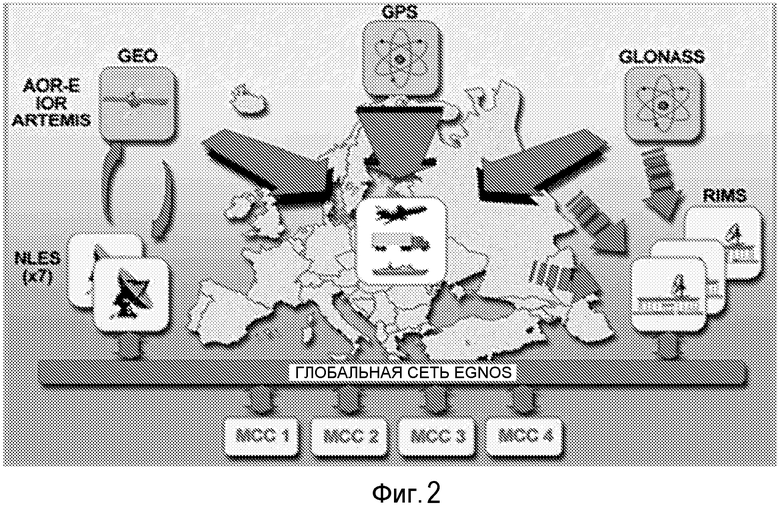
Фиг.2 схематично показывает архитектуру EGNOS. В частности, тридцать четыре опорных станции мониторинга целостности данных (RIMS) развертываются, чтобы отслеживать спутники совокупности спутников. Каждый спутник должен отслеживаться посредством нескольких RIMS до того, как формируются сообщения корректировки и целостности данных. Четыре центра управления полетами (MCC) обрабатывают данные из этих RIMS, чтобы формировать сообщения корректировки и целостности данных для каждого спутника. В частности, MMC формируют один набор данных целостности и GPS-корректировок для Европы, содержащий элементы для корректировки ошибок синхросигнала спутника и эфемерид, а также ошибки вследствие прохождения ионосферы.
Только один из этих MCC является активным и рабочим, другие MCC составляют горячий резерв, который может быть активирован в том случае, если возникает проблема.
Навигационные наземные станции (NLES) выгружают сообщения корректировки и целостности на спутники для последующей широковещательной передачи пользователям. Система должна развертывать две NLES (одна основная и одна резервная) для каждого из трех геостационарных спутников и дополнительную NLES для целей тестирования и проверки достоверности.
Космический сегмент EGNOS состоит из трех геостационарных спутников с глобальным наземным покрытием. Действующая система EGNOS основана на использовании двух спутников INMARSAT-3 (AOR-E и IOR), а также спутника ESA ARTEMIS.
Данные целостности и корректировки модулируются в имитирующем GPS сигнале и широковещательно передаются пользователям из трех геостационарных спутников. Результирующая производительность (близко к 1 м по всей Европе) является независимой от расстояния "пользователь/опорная станция". Пользователи EGNOS должны извлекать выгоду из повышенной доступности вследствие трех дополнительных дальностей.
Кроме того, пользователи EGNOS должны иметь возможность отслеживать, по меньшей мере, два геостационарных спутника. Требуется менее шести секунд для того, чтобы уведомлять пользователей о проблеме с одной из совокупностей спутников, когда она отслеживается посредством RIMS-сети.
EGNOS предоставляет различные уровни обслуживания в различных частях области, покрываемой посредством геостационарных спутников. Оптимальная производительность получается в рамках базовой области покрытия, как показано на фиг.2. Производительность ухудшается за пределами базовой области, хотя имеется некоторый потенциал для улучшения через функциональную совместимость с японскими, американскими и канадскими системами.
Как упомянуто выше, EGNOS использует идентичную с GPS частоту (L1) и коды измерения дальности, но имеет другой формат сообщений с данными. Сообщения поступают один раз в секунду и состоят из 250 битов, из которых 212 представляют данные уточнения, восемь используются для обнаружения и синхронизации, шесть, чтобы идентифицировать тип сообщения, и оставшиеся двадцать четыре являются битами четности, чтобы защищать от использования поврежденных данных.
Шестьдесят четыре различных типа сообщений заданы к настоящему времени для того, чтобы широковещательно передавать данные целостности и корректировки, и некоторые из них показаны в следующей таблице:
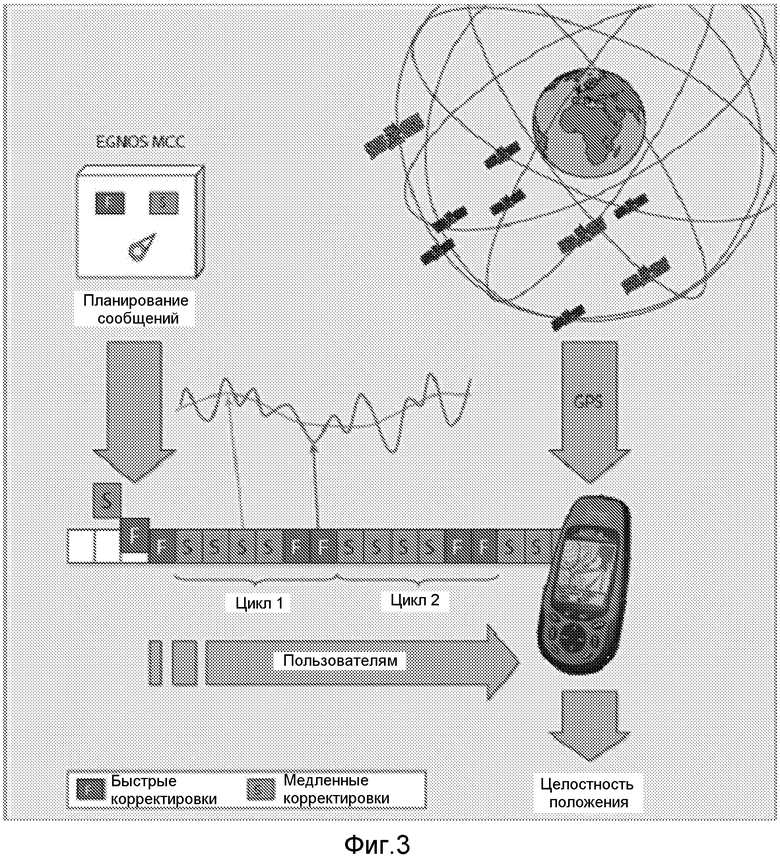
Планирование сообщений соответствует 6-секундному рабочему циклу. Оно структурировано как для того, чтобы приоритезировать 6-секундное время до оповещения целостности, так и для того, чтобы минимизировать время для инициализации EGNOS. Тем не менее, хотя считается, что планирование EGNOS-сообщений минимизирует период инициализации, EGNOS-приемники по-прежнему должны инициализироваться в течение бездействующего периода инициализации перед активацией, т.е. перед предоставлением корректировок.
Фиг.3 схематично показывает архитектуру предоставления и планирования EGNOS-сообщений.
Быстрые и медленные корректировки моделируют временную декорреляцию различных источников ошибок. Быстрые корректировки моделируют быстро изменяющиеся источники ошибок, в том числе ошибки синхросигнала спутника. Медленные корректировки моделируют более медленно изменяющиеся источники ошибок, в том числе долговременный уход синхросигнала спутника, ошибки спутниковых эфемерид и ионосферные задержки, последние предоставляются в заранее заданных точках сетки.
Обработка сообщений является комплексной, поскольку сообщения предназначены, чтобы минимизировать требования по полосе пропускания и поскольку они должны принимать во внимание обновленную информацию по GPS-навигации.
В дальнейшем приводятся два примера обработки SBAS-сообщений: первый касается сообщения быстрой корректировки, а второй касается сообщения медленной корректировки.
В частности, SBAS-сообщение типа 2, как показано в предыдущей таблице, заключает в себе быстрые корректировки. При поступлении SBAS-сообщения этого типа EGNOS-приемник выполняет следующие операции:
- декодируется SBAS-сообщение, и извлекаются корректировка псевдодальности PRC, корректировка скорости изменения дальности RRC и время T0 применимости;
- вычисляется разность TR-T0, где TR - это момент, в который принято EGNOS-сообщение 2, и для быстрых корректировок в результате всегда получается, что T0<TR;
- фактическая корректировка псевдодальности PRCA вычисляется следующим образом:

- фактическая корректировка псевдодальности PRCA прибавляется к вычисленной псевдодальности на основе GPS, чтобы удалять быструю ошибку синхросигнала спутника и получать скорректированную псевдодальность; и
- вычисляется уточненное положение на основе скорректированной псевдодальности.
В отличие от SBAS-сообщения типа 2, SBAS-сообщение типа 25 заключает в себе медленные корректировки. При поступлении SBAS-сообщения этого типа EGNOS-приемник выполняет следующие операции:
- SBAS-сообщение декодируется и считается достоверным в то время, пока данные, извлеченные из предыдущего сообщения 25, сохраняются в памяти; и
- извлекаются код v скорости, члены Δx, Δy, Δz корректировки местоположения спутника и члены временной корректировки.
Здесь, EGNOS-приемник может выполнять два альтернативных набора операций в зависимости от значения, предположенного посредством кода v скорости.
Если v=0,
- предыдущее сообщение 25 заменяется на фактическое:
- принимаемое от GPS местоположение  спутника корректируется следующим образом:
спутника корректируется следующим образом:
и
- уточненное положение вычисляется на основе скорректированного местоположения  спутника.
спутника.
Если v=1,
- члены Δvx, Δvy, Δvz корректировки скорости спутника и время T0 применимости также извлекаются;
- если TR<T0, где TR - это момент, в который принято EGNOS-сообщение 25, и предыдущее сообщение 25 по-прежнему является достоверным, применяются корректировки предыдущего сообщения 25;
- если TR<T0, и предыдущее сообщение 25 более не является достоверным, вычисляется разность TR-T0 на основе фактического сообщения 25;
- если TR>T0, то вычисляется разность TR-T0;
- конечные члены корректировки местоположения спутника вычисляются следующим образом:
- принимаемое GPS местоположение  спутника корректируется следующим образом:
спутника корректируется следующим образом:
и
- вычисляется уточненное положение на основе скорректированного местоположения  спутника.
спутника.
Цель и сущность изобретения
Заявитель провел всестороннее исследование, чтобы разработать реализованный в программном обеспечении EGNOS-приемник, способный работать одновременно для нескольких GPS-приемников. Во время этого исследования Заявитель обратил внимание, что использование классического подхода к вычислению EGNOS-корректировок подразумевает необходимость предоставления определенного числа полных экземпляров EGNOS-приемников, которое равно числу обслуживаемых GPS-приемников.
Фактически, согласно классическому подходу к вычислению EGNOS-корректировок, EGNOS-приемник принимает и декодирует SBAS-сообщение, извлекает данные уточнения, такие как корректировка PRC псевдодальности, корректировка RRC скорости изменения дальности, время T0 применимости, код v скорости, члены Δx, Δy, Δz корректировки местоположения спутника и т.д., вычисляет корректировки, такие как фактическая корректировка PRCA псевдодальности, применяет корректировки к измерениям на основе GPS, таким как вычисленная псевдодальность на основе GPS, и к принимаемым от GPS данным, таким как принимаемое от GPS местоположение спутника  , и контекстуально вычисляет уточненное положение.
, и контекстуально вычисляет уточненное положение.
Следовательно, из этого следует, что согласно классическому подходу к вычислению EGNOS-корректировок, EGNOS-приемник должен быть полностью выделен для обслуживания GPS-приемника.
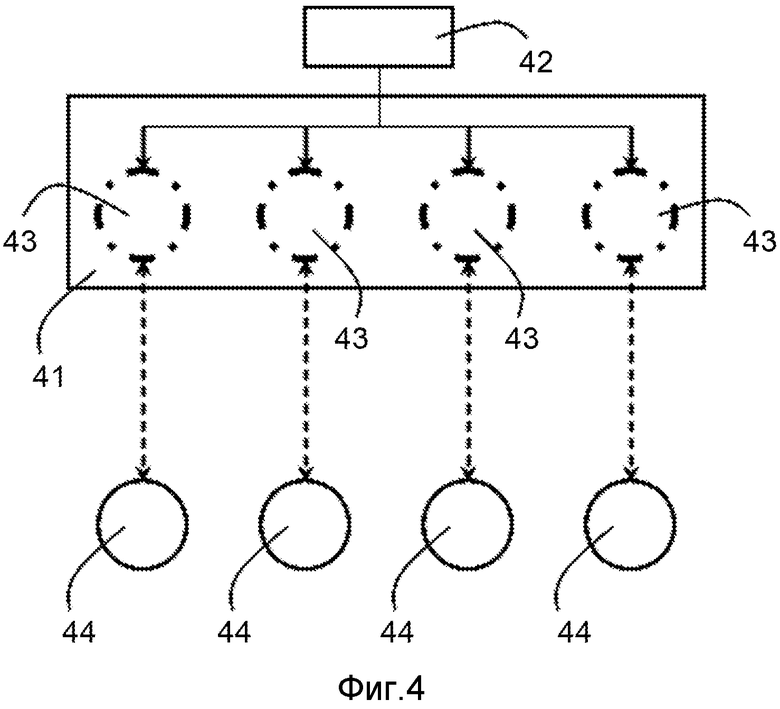
В частности, фиг.4 схематично показывает этот сценарий, в котором электронный процессор 41, соединенный со средством 42 приема SBAS-сообщений и сконфигурированный, чтобы принимать в качестве входных данных SBAS-сообщения из него, обслуживает четыре GPS-приемника 44. Как показано на фиг.4, электронный процессор 41 предоставляет четыре полных экземпляра 43 EGNOS-приемника, каждый из которых соединен и полностью выделен для соответствующего обслуживаемого GPS-приемника.
Этот сценарий подразумевает значительное потребление ресурсов с точки зрения ресурсов обработки и выделенного объема памяти вследствие обработки с большим объемом вычислений.
Кроме того, после того как экземпляр 43 EGNOS-приемника создан, он должен поддерживать возможность обработки и продолжать обрабатывать SBAS-сообщения, даже если соответствующий GPS-приемник 44 не запрашивает уточненное положение на основе EGNOS, тем самым приводя к потере ресурсов. Фактически, в противном случае, если экземпляр 43 EGNOS-приемника не выделен, когда GPS-приемник 44 начинает снова запрашивать уточненное положение на основе EGNOS, необходимо создавать новый экземпляр 43 EGNOS-приемника и ожидать в течение неэффективного периода инициализации перед получением достоверного уточненного положения на основе EGNOS.
Кроме того, выдвигаются гипотезы для нескольких будущих сценариев снабжения SBAS-сообщениями, к примеру через пакетную сеть, которую трудно соединить интерфейсом с каким-либо одним экземпляром EGNOS-приемника.
Цель настоящего изобретения состоит в том, чтобы затем предоставлять EGNOS- или, вообще, SBAS-приемник, который может сглаживать, по меньшей мере, частично, вышеуказанные недостатки.
Эта цель достигается в соответствии с настоящим изобретением, которое относится к SBAS-приемнику и программному продукту программного обеспечения, сконфигурированному, чтобы реализовывать SBAS-приемник, как задано в прилагаемой формуле изобретения.
Таким образом, приемник на основе спутниковой системы уточнения (SBAS) согласно настоящему изобретению сконфигурирован, чтобы принимать SBAS-сообщения, заключающие в себе данные уточнения, и предоставлять в один или более обслуживаемых GPS-приемников информацию уточнения на основе данных уточнения, извлеченных из принимаемых SBAS-сообщений. SBAS-приемник предназначен, чтобы реализовывать конечный автомат (FSM), который должен быть общим для всех обслуживаемых GPS-приемников, и сконфигурирован, чтобы развиваться на основе принимаемых SBAS-сообщений и сохранять данные уточнения, заключенные в них. Общий FSM дополнительно сконфигурирован, чтобы взаимодействовать с определенным числом модулей корректировки, равным числу обслуживаемых GPS-приемников, причем каждый модуль корректировки сконфигурирован, чтобы принимать GPS-данные от соответствующего обслуживаемого GPS-приемника и вычислять уточненное положение для соответствующего обслуживаемого GPS-приемника на основе соответствующих GPS-данных и данных уточнения, извлеченных из общего FSM.
Простым образом модули корректировки могут быть реализованы в SBAS-приемнике, и информацией уточнения, предоставленной посредством SBAS-приемника в каждый обслуживаемый GPS-приемник, может быть уточненное положение, вычисляемое посредством соответствующего модуля корректировки.
В противном случае, модули корректировки могут быть легко реализованы в соответствующем обслуживаемом GPS-приемнике, и информацией уточнения, предоставленной посредством SBAS-приемника в обслуживаемый GPS-приемник, могут быть данные уточнения, сохраненные в общем FSM.
Кроме того, SBAS-приемник может быть легко реализован в программном обеспечении.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения предпочтительные варианты осуществления, которые предназначены просто в качестве примера и не должны рассматриваться как ограничивающие, далее описываются со ссылкой на прилагаемые чертежи (не нарисованные в масштабе), на которых:
Фиг.1 схематично показывает местоположения нескольких спутниковых систем уточнения (SBAS), создаваемых в мире;
Фиг.2 схематично показывает архитектуру европейской геостационарной службы навигационного покрытия (EGNOS);
Фиг.3 схематично показывает архитектуру предоставления и планирования EGNOS-сообщений;
Фиг.4 схематично показывает EGNOS-приемник, который обслуживает несколько GPS-приемников согласно классическому подходу к вычислению EGNOS-корректировок;
Фиг.5 схематично показывает SBAS-приемник согласно настоящему изобретению;
Фиг.6 показывает схематическое представление в форме ориентированного графа, иллюстрирующее пример выделенного конечного автомата (FSM), конкретного для обработки сообщений быстрой корректировки согласно настоящему изобретению;
Фиг.7 показывает схематическое представление в форме ориентированного графа, иллюстрирующее пример выделенного FSM, специализированного для обработки сообщений медленной корректировки согласно настоящему изобретению; и
Фиг.8 схематично показывает SBAS-приемник, который обслуживает несколько GPS-приемников согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
Нижеследующее пояснение представлено для того, чтобы дать возможность специалистам в данной области техники создавать и использовать изобретение. Различные модификации вариантов осуществления должны быть легко очевидными для специалистов в данной области техники без отступления от объема настоящего изобретения согласно формуле изобретения. Таким образом, настоящее изобретение не должно быть ограничено показанными вариантами осуществления, а должно соответствовать самому широкому объему, соответствующему принципам и признакам, раскрытым в данном документе, и заданному в прилагаемой формуле изобретения.
Кроме того, настоящее изобретение реализуется посредством программного продукта программного обеспечения, загружаемого в память электронного процессора и содержащего фрагменты программного кода для реализации SBAS-приемника, описанного в дальнейшем, когда программный продукт программного обеспечения запускается в электронном процессоре.
Согласно настоящему изобретению, процесс вычисления SBAS-корректировок разделяется на два подпроцесса, т.е. прием и декодирование SBAS-сообщений и извлечение данных уточнения отсоединяются от вычисления и применения корректировок и вычисления уточненного положения.
Это выполняется посредством асинхронного выполнения этих двух подпроцессов, т.е. посредством поддержания времени корректировки Tc отличным от времени приема SBAS-сообщения TR.
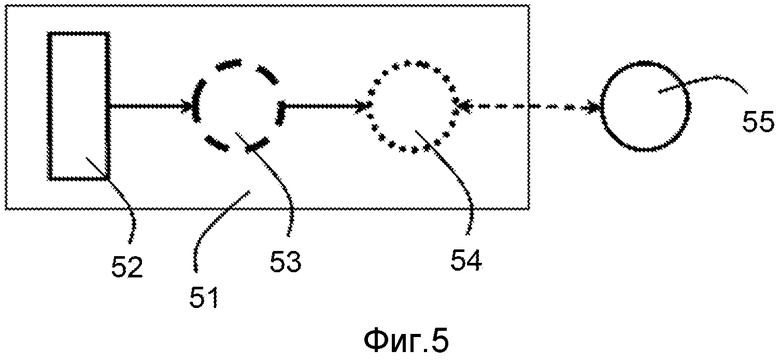
Фиг.5 схематично показывает SBAS-приемник 51 согласно настоящему изобретению.
Подробно, SBAS-приемник 51 содержит средство 52 приема SBAS-сообщений, общий конечный автомат (FSM) 53 и модуль 54 корректировки. Кроме того, SBAS-приемник 51 соединен с GPS-приемником 55.
Более подробно, средство 52 приема SBAS-сообщений может быть выделенной SBAS-антенной либо интерфейсом пакетной сети, таким как GPRS или UMTS или WiFi, или WiMAX, или Интернет, либо интерфейсом выделенной TCP/IP-сети.
Общий FSM 53 сконфигурирован, чтобы принимать в качестве ввода SBAS-сообщения из средства 52 приемника SBAS-сообщений и декодировать принимаемые SBAS-сообщения, извлекая данные уточнения независимо и асинхронно относительно вычисления и применения корректировок и вычисления уточненного положения.
Общий FSM 53 является результатом сделанного Заявителем наблюдения того, что обработка приема и декодирования SBAS-сообщений и извлечения данных уточнения, если отсоединена от вычисления и применения корректировок и вычисления уточненного положения, согласно настоящему изобретению, может моделироваться как конечный автомат (FSM). Каждое состояние общего FSM 53 предоставляет информацию о доступности или недоступности данных уточнения, и каждое изменение состояния подразумевает применимость различных уровней целостности (неточный подход, точный подход APV I и II). В свою очередь, общий FSM 53 содержит соответствующий выделенный FSM для каждого типа SBAS-сообщения. Состояние каждого выделенного FSM предоставляет информацию о доступности или недоступности данных уточнения, конкретных для соответствующего SBAS-сообщения, которому он выделен. Кроме того, состояние каждого выделенного FSM ассоциировано с соответствующими переменными состояния, которые содержат данные уточнения, которые должны использоваться для того, чтобы вычислять соответствующие конкретные корректировки.
Кроме того, состояние общего FSM 53 представляется посредством набора состояний всех выделенных FSM и ассоциировано с переменными состояния, содержащими переменные состояния всех выделенных FSM.
В частности, каждую секунду, при поступлении нового SBAS-сообщения соответствующий выделенный FSM декодирует SBAS-сообщение, извлекая данные уточнения. Результирующее состояние выделенного FSM представляет доступность конкретных данных уточнения и ассоциировано с соответствующими переменными состояния, которые содержат только что извлеченные данные уточнения.
В дальнейшем приводятся два примера обработки SBAS-сообщений, выполняемой посредством соответствующих выделенных FSM: первый касается сообщения быстрой корректировки, а второй касается сообщения медленной корректировки.
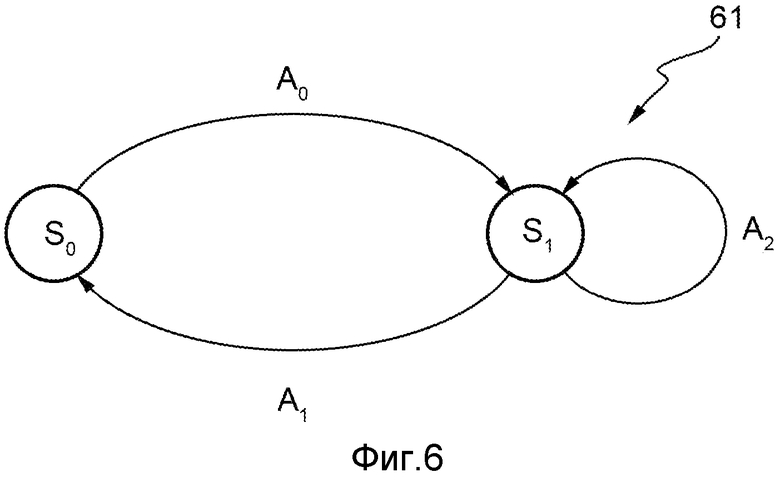
Фиг.6 показывает схематическое представление в форме ориентированного графа, иллюстрирующее пример выделенного FSM 61, специализированного для обработки сообщений быстрой корректировки, в частности специализированного для обработки SBAS-сообщений 2. Представление в форме ориентированного графа состоит из вершин S0 и S1 и направленных дуг A0, A1 и A2. Состояния выделенного FSM 61 представляются посредством вершин S0 и S1, а переходы состояния представляются посредством дуг A0, A1 и A2. Вершина S0 представляет "состояние отсутствия доступного уточнения", при этом вершина S1 представляет "состояние доступного уточнения".
Подробно, если в момент TR принимается SBAS-сообщение 2, соответствующий выделенный FSM 61 декодирует SBAS-сообщение и извлекает данные уточнения, т.е. корректировку псевдодальности PRC, корректировку скорости изменения дальности RRC и время T0 применимости.
Кроме того, если выделенный FSM 61 уже находится в "состоянии доступного уточнения" S1, он остается в "состоянии доступного уточнения" S1, как указано посредством дуги A2, и заменяет в ассоциированных переменных состояния S1 старые данные уточнения на только что извлеченные. Лимит времени достоверности ассоциирован с новыми переменными состояния S1.
В противном случае, если выделенный FSM 61 находится в "состоянии отсутствия доступного уточнения" S0, возникает переход A0 состояния, и выделенный FSM 61 переходит от S0 к S1, и только что извлеченные данные уточнения становятся переменными состояния S1. С другой стороны, лимит времени достоверности ассоциирован с переменными состояния S1.
Переход A1 состояния возникает, когда лимит времени достоверности, ассоциированный с переменными состояния S1, истекает без поступления новых SBAS-сообщений 2.
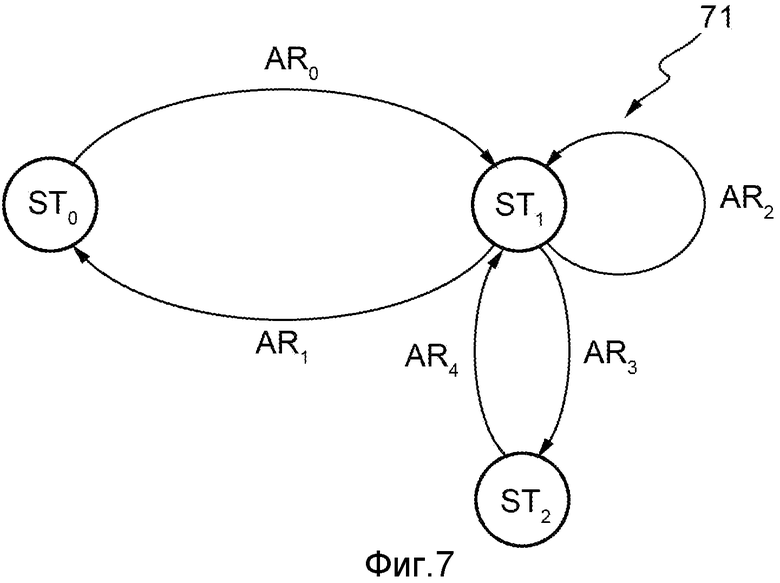
Фиг.7 показывает схематическое представление в форме ориентированного графа, иллюстрирующее пример выделенного FSM 71, специализированного для обработки сообщений медленной корректировки, в частности специализированного для обработки SBAS-сообщений 25. Представление в форме ориентированного графа состоит из вершин ST0, ST1 и ST2 и направленных дуг AR0, AR1, AR2, AR3 и AR4. Состояния FSM 71 представляются посредством вершин ST0, ST1 и ST2, а переходы состояния представляются посредством дуг AR0, AR1, AR2, AR3 и AR4. Вершина ST0 представляет "состояние отсутствия доступного уточнения", вершина ST1 представляет "состояние одного доступного уточнения", а вершина ST2 представляет "состояние двух доступных уточнений".
Подробно, в момент TR принимается SBAS-сообщение 25.
Если выделенный FSM 71 находится в "состоянии отсутствия доступного уточнения" ST0, SBAS-сообщение декодируется и считается достоверным в то время, когда извлекаются данные уточнения, т.е. код v скорости, члены Δx, Δy, Δz корректировки местоположения спутника и члены временной корректировки.
Кроме того, если код v скорости равен 1, члены Δvx, Δvy, Δvz корректировки скорости спутника и время T0 применимости также извлекаются. Контекстуально, возникает переход AR0 состояния, и выделенный FSM 71 переходит от ST0 к ST1, и только что извлеченные данные уточнения становятся переменными состояния ST1. Лимит времени достоверности ассоциирован с переменными состояния ST1.
Если выделенный FSM 71 уже находится в "состоянии одного доступного уточнения" ST1, SBAS-сообщение декодируется и считается достоверным в то время, когда переменные состояния ST1, заключающие в себе данные уточнения, извлеченные из предыдущего SBAS-сообщения 25, сохраняются в памяти. Контекстуально, извлекаются данные уточнения, т.е. код v скорости, члены Δx, Δy, Δz корректировки местоположения спутника и члены временной корректировки. Затем, если код v скорости равен 0, выделенный FSM 71 остается в "состоянии одного доступного уточнения" ST1, как указано посредством дуги AR2, и заменяет в ассоциированных переменных состояния ST1 данные уточнения, извлеченные из предыдущего SBAS-сообщения 25, на только что извлеченные. Кроме того, лимит времени достоверности ассоциирован с новыми переменными состояния ST1. В противном случае, если код v скорости равен 1, члены Δvx, Δvy, Δvz корректировки скорости спутника и время T0 применимости также извлекаются. Контекстуально, возникает переход AR3 состояния, и выделенный FSM 71 переходит от ST1 к ST2, и только что извлеченные данные уточнения наряду с данными уточнения, извлеченными из предыдущего SBAS-сообщения 25, становятся переменными состояния ST2. Данные уточнения, извлеченные из предыдущего SBAS-сообщения 25, по-прежнему ассоциированы с лимитом времени достоверности, с которым они ассоциировались как переменные состояния ST1, при этом только что извлеченные данные уточнения ассоциированы с соответствующим лимитом времени достоверности.
Когда лимит времени достоверности, ассоциированный с данными уточнения, извлеченными из предыдущего SBAS-сообщения 25, истекает, если это происходит до времени T0 применимости, извлеченного из последнего принимаемого SBAS-сообщения 25, или в ином случае после времени T0 применимости, извлеченного из последнего принимаемого SBAS-сообщения 25, выделенный FSM 71 переходит от ST2 к ST1, как представлено посредством изменения AR4 состояния. В этом случае, данные уточнения последнего принимаемого SBAS-сообщения 25 становятся переменными состояния ST1 и продолжают быть ассоциированными с соответствующим лимитом времени достоверности.
В завершение, переход AR1 состояния возникает, когда лимит времени достоверности, ассоциированный с переменными состояния ST1, истекает без поступления новых доступных SBAS-сообщений 25.
Общий FSM 53 сохраняет состояние наряду с ассоциированными переменными состояния в средстве сохранения, таком как память, если средство сохранения реализовано в аппаратном обеспечении, или структура данных, если средство сохранения реализовано в программном обеспечении.
Модуль 54 корректировки сконфигурирован, чтобы извлекать состояние и ассоциированные переменные состояния общего FSM 53 из средства сохранения. Кроме того, модуль 54 корректировки соединен с GPS-приемником 55 и сконфигурирован, чтобы принимать в качестве входных данных GPS-данные, такие как вычисленная псевдодальность на основе GPS и принимаемое от GPS местоположение спутника, из него.
Таким образом, модуль 54 корректировки асинхронно относительно общего FSM 53 вычисляет корректировки на основе состояния общего FSM 53 и ассоциированные переменные состояния, применяет вычисленные корректировки и вычисляет уточненное положение.
В дальнейшем приводятся три примера обработки, выполняемой посредством модуля 54 корректировки. Для упрощения описания в первом примере состояние общего FSM 53 представляется только посредством "состояния доступного уточнения" выделенного FSM 61, во втором примере состояние общего FSM 53 представляется только посредством "состояния одного доступного уточнения" выделенного FSM 71, и в третьем примере состояние общего FSM 53 представляется только посредством "состояния двух доступных уточнений" выделенного FSM 71.
В частности, в момент Tc GPS-приемник 55 запрашивает в модуле 54 корректировки уточненное положение и отправляет GPS-данные в модуль 54 корректировки.
Таким образом, в первом случае, модуль 54 корректировки извлекает из средства сохранения состояние общего FSM 53, представленное только посредством "состояния доступного уточнения" выделенного FSM 61, и ассоциированные переменные состояния, т.е. корректировку псевдодальности PRC, корректировку скорости изменения дальности RRC и время T0 применимости. Затем, модуль 54 корректировки выполняет следующие операции:
- вычисляет разность Tc-T0;
- вычисляет фактическую корректировку псевдодальности PRCA следующим образом:

- прибавляет фактическую корректировку псевдодальности PRCA к вычисленной псевдодальности на основе GPS, чтобы удалять быструю ошибку синхросигнала спутника и получать скорректированную псевдодальность; и
- вычисляет уточненное положение на основе скорректированной псевдодальности.
По-другому, во втором случае модуль 54 корректировки извлекает из средства сохранения состояние общего FSM 53, представленное только посредством "состояния одного доступного уточнения" выделенного FSM 71, и ассоциированные переменные состояния, т.е. код v скорости, члены Δx, Δy, Δz корректировки местоположения спутника, члены временной корректировки и, если v=1, также члены Δvx, Δvy, Δvz корректировки скорости спутника и время T0 применимости.
Здесь, модуль 54 корректировки может выполнять два альтернативных набора операций в зависимости от значения, предположенного посредством кода v скорости.
Если v=0, модуль 54 корректировки выполняет следующие операции:
- корректирует принимаемое от GPS местоположение спутника 
следующим образом:
и
- вычисляет уточненное положение на основе скорректированного местоположения  спутника.
спутника.
Если v=1, модуль 54 корректировки выполняет следующие операции:
- вычисляет разность Tc-T0;
- вычисляет конечные члены корректировки местоположения спутника следующим образом:
- корректирует принимаемое от GPS местоположение  спутника следующим образом:
спутника следующим образом:
и
- вычисляет уточненное положение на основе скорректированного местоположения  спутника
спутника
В третьем случае, модуль 54 корректировки извлекает из средства сохранения состояние общего FSM 53, представленное только посредством "состояния двух уточнений" выделенного FSM 71, и ассоциированные переменные состояния, т.е. старые данные уточнения (старый код v скорости, старые члены Δx, Δy, Δz корректировки местоположения спутника, старые члены временной корректировки и, если старый код скорости v=1, также старые члены Δvx, Δvy, Δvz корректировки скорости спутника и старое время T0 применимости) и новые данные уточнения (новый код v скорости, новые члены Δx, Δy, Δz корректировки местоположения спутника, новые члены временной корректировки, новые члены Δvx, Δvy, Δvz корректировки скорости спутника и новое время T0 применимости).
Модуль 54 корректировки использует старые данные уточнения для того, чтобы вычислять и применять корректировки и вычислять уточненное положение.
Фиг.8 показывает электронный процессор 81, сконфигурированный, чтобы предоставлять в несколько GPS-приемников 85 соответствующие уточненные положения на основе SBAS согласно настоящему изобретению. В частности, электронный процессор 81 соединен со средством 82 приема SBAS-сообщений и сконфигурирован, чтобы принимать в качестве входных данных SBAS-сообщения из него, и предоставляет один реализованный в программном обеспечении экземпляр 83 общего FSM 53 согласно настоящему изобретению и определенное число реализованных в программном обеспечении экземпляров 84 модуля 54 корректировки согласно настоящему изобретению, каждый из них выделяется соответствующему GPS-приемнику 85, чтобы получать уточненное положение на основе SBAS.
В частности, средство 82 приемника SBAS-сообщений может быть выделенной SBAS-антенной либо интерфейсом пакетной сети, таким как GPRS, или UMTS, или WiFi, или WiMAX, или Интернет, либо интерфейсом выделенной TCP/IP-сети.
Кроме того, один реализованный в программном обеспечении экземпляр 83 всегда обрабатывает SBAS-сообщения, при этом когда GPS-приемник 85 начинает запрашивать уточненное положение на основе SBAS, соответствующий реализованный в программном обеспечении экземпляр 84 создается посредством электронного процессора 81, соответствующий реализованный в программном обеспечении экземпляр 84 полностью выделен для предоставления в GPS-приемник 85 уточненного положения на основе SBAS. Когда GPS-приемник 85 прекращает запрашивание уточненного положения на основе SBAS, соответствующий реализованный в программном обеспечении экземпляр 84 освобождается посредством электронного процессора 81.
Из вышеописанного может сразу приниматься во внимание то, что в случае предоставления посредством электронного процессора 81 в несколько GPS-приемников 85 соответствующего уточненного положения на основе SBAS настоящее изобретение обеспечивает значительную экономию ресурсов с точки зрения ресурсов обработки и выделенной памяти относительно классического подхода к вычислению SBAS-корректировок.
Кроме того, всегда в случае предоставления посредством электронного процессора 81 в несколько GPS-приемников 85 соответствующего уточненного положения на основе SBAS, будущие сценарии снабжения SBAS-сообщениями, к примеру, через пакетную сеть, будут легко соединяться интерфейсом с одним реализованным в программном обеспечении экземпляром 83.
Кроме того, очевидно, что в настоящем изобретении могут осуществляться многочисленные модификации и разновидности, все из которых попадают в рамки объема изобретения, заданного в прилагаемой формуле изобретения.
В частности, можно принимать во внимание, что SBAS-приемник, согласно настоящему изобретению, может предоставлять в несколько удаленных GPS-приемников соответствующее уточненное положение на основе SBAS, например, через пакетную сеть. В этом случае, поскольку момент, в который GPS-приемник запрашивает в соответствующем модуле корректировки уточненное положение, может не являться моментом, в который соответствующий модуль корректировки принимает этот запрос, вследствие задержек из-за передачи через пакетную сеть, общий FSM может сохранять частичную или полную хронологию своих состояний и ассоциированные переменные состояния вместе с опорными временными метками. Следовательно, когда модуль корректировки принимает запрос на уточненное положение на основе SBAS, он извлекает из средства сохранения состояние FSM наряду с ассоциированными переменными состояния, которые имеют наиболее подходящую опорную временную метку для момента, в который GPS-приемник запрашивает уточненное положение на основе SBAS.
В завершение, дополнительно может приниматься во внимание, что задачи обработки модуля корректировки могут быть реализованы посредством улучшенного GPS-приемника, удаленно подключенного к общему FSM, например, через пакетную сеть.
Изобретение относится к области радиотехники, а именно к приемникам спутниковой системы уточнения (SBAS), и может быть использовано в качестве приемника европейской геостационарной службы навигационного покрытия (EGNOS). Технический результат заключается в реализации SBAS-приемника, сконфигурированного для обслуживания множества GPS-приемников с достижением сбережения ресурсов обработки и выделенной памяти; без ожидания того, чтобы обслужить каждый GPS-приемник, в течение нерабочего периода инициализации перед получением достоверного уточненного положения на основе SBAS для обслуживаемого GPS-приемника; с возможностью взаимодействия с будущими сценариями снабжения SBAS-сообщениями. Для этого SBAS-приемник (81) сконфигурирован, чтобы принимать SBAS-сообщения, включающие данные уточнения, и предоставлять в один или более GPS-приемников (85) информацию уточнения на основе данных уточнения, извлеченных из SBAS-сообщений. SBAS-приемник (81) выполнен, чтобы реализовывать конечный автомат (FSM) (83), являющийся общим для всех обслуживаемых GPS-приемников (85), и сконфигурирован, чтобы развиваться на основе SBAS-сообщений и сохранять данные уточнения, заключенные в них. Общий FSM (83) сконфигурирован, чтобы взаимодействовать с определенным числом модулей (84) корректировки, равным числу GPS-приемников (85), каждый модуль (84) корректировки сконфигурирован, чтобы принимать GPS-данные от соответствующего обслуживаемого GPS-приемника (85) и вычислять уточненное положение для него на основе GPS-данных и данных уточнения, извлеченных из общего FSM (83). 2 н. и 12 з.п. ф-лы, 1 табл., 8 ил.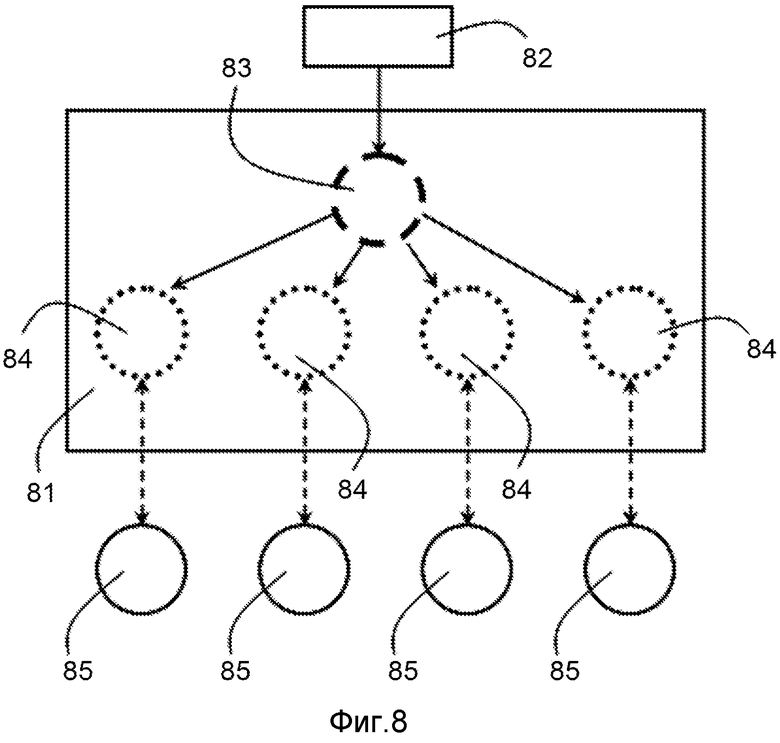
1. SBAS-приемник (51; 81), сконфигурированный, чтобы принимать SBAS-сообщения, заключающие в себе данные уточнения, и предоставлять в один или более обслуживаемых GPS-приемников (55; 85) информацию уточнения на основе данных уточнения, извлекаемых из принимаемых SBAS-сообщений; отличающийся тем, что SBAS-приемник (51; 81) выполнен, чтобы реализовывать конечный автомат (53; 83), который является общим для всех обслуживаемых GPS-приемников (55; 85), и сконфигурирован, чтобы развиваться на основе принимаемых SBAS-сообщений и сохранять данные уточнения, заключенные в них; при этом общий конечный автомат (53; 83) дополнительно сконфигурирован, чтобы взаимодействовать с определенным числом модулей (54; 84) корректировки, равным числу обслуживаемых GPS-приемников (55; 85), при этом каждый модуль (54; 84) корректировки сконфигурирован, чтобы принимать GPS-данные от соответствующего обслуживаемого GPS-приемника (55; 85) и вычислять уточненное положение для соответствующего обслуживаемого GPS-приемника (55; 85) на основе соответствующих GPS-данных и данных уточнения, извлеченных из общего конечного автомата (53; 83).
2. SBAS-приемник по п.1, при этом модули (54; 84) корректировки реализованы в SBAS-приемнике (51; 81), и информацией уточнения, предоставленной посредством SBAS-приемника (51; 81) в каждый обслуживаемый GPS-приемник (55; 85), является уточненное положение, вычисляемое посредством соответствующего модуля (54; 84) корректировки.
3. SBAS-приемник по п.1, при этом каждый модуль (54; 84) корректировки реализован в соответствующем обслуживаемом GPS-приемнике (55; 85), и информацией уточнения, предоставленной посредством SBAS-приемника (51; 81) в обслуживаемый GPS-приемник (55; 85), являются данные уточнения, сохраненные в общем конечном автомате (53; 83).
4. SBAS-приемник по любому из пп.1-3, в котором общий конечный автомат (53; 83) содержит определенное число выделенных конечных автоматов, каждый из которых ассоциирован с соответствующим типом SBAS-сообщения, которое может быть принято посредством SBAS-приемника (51; 81), и каждый из которых сконфигурирован, чтобы развиваться на основе принимаемых соответствующих SBAS-сообщений и сохранять данные уточнения, заключенные в них.
5. SBAS-приемник по п.4, в котором каждый выделенный конечный автомат сконфигурирован, чтобы предоставлять информацию о доступности или недоступности соответствующих данных уточнения и сохранять соответствующие данные уточнения, когда они являются доступными.
6. SBAS-приемник по п.5, в котором выделенный конечный автомат, ассоциированный с конкретным типом SBAS-сообщения, дополнительно сконфигурирован, чтобы сохранять различные наборы данных уточнения, ассоциированных с различными условиями применения, во время вычисления уточненного положения для обслуживаемого GPS-приемника (55; 85).
7. SBAS-приемник по п.6, в котором модуль (54; 84) корректировки сконфигурирован, чтобы применять, во время вычисления уточненного положения для обслуживаемого GPS-приемника (55; 85), набор данных уточнения, условие применения которых удовлетворено.
8. SBAS-приемник по п.7, при этом условие применения включает в себя время применения соответствующего набора данных уточнения во время вычисления уточненного положения.
9. SBAS-приемник по любому из пп.1-3, дополнительно включающий в себя антенну (52; 82), чтобы принимать SBAS-сообщения.
10. SBAS-приемник по любому из пп.1-3, дополнительно включающий в себя первый интерфейс (52; 82) ввода пакетной сети, чтобы принимать SBAS-сообщения.
11. SBAS-приемник по любому из пп.1-3, при этом общий конечный автомат (53; 83) и модули (54; 84) корректировки реализованы в программном обеспечении.
12. SBAS-приемник по любому из пп.1-3, дополнительно включающий в себя второй интерфейс ввода пакетной сети, чтобы принимать GPS-данные от обслуживаемых GPS-приемников (55; 85).
13. SBAS-приемник по любому из пп.1-3, при этом он интегрирован с GPS-приемником (55; 85).
14. Машиночитаемый носитель, содержащий программное обеспечение, загружаемое в память электронного процессора и содержащее фрагменты программного кода для реализации SBAS-приемника (51; 81) по любому из пп.1-13, когда программное обеспечение запускают в электронном процессоре.
| US 2005090265 А1, 28.04.2005 | |||
| RU 2006126482 А, 27.01.2008 | |||
| US 2007247361 А1, 25.10.2007 | |||
| US 2007216574 A1, 20.09.2007 | |||
| US 2006274821 A1, 07.12.2006 | |||
| WO 2004017092 A, 26.02.2004 | |||
| US 2006047413 A1, 02.03.2006. |

