Перекрестная ссылка на родственную заявку
По настоящему документу испрашивается приоритет на основании предварительной заявки США № 61/308,467, поданной 26 февраля 2010 г. и озаглавленной "METHOD AND SYSTEM FOR ESTIMATING POSITION WITH BIAS COMPENSATION" по ст. 119(e) раздела 35 U.S.C.
Область техники, к которой относится изобретение
Это изобретение относится к способу и системе для оценивания положения, ориентации или того и другого у объекта или транспортного средства с компенсацией смещения, чтобы поддерживать объединенное использование спутниковых передач Системы глобального позиционирования (GPS) и спутниковых передач GLONASS (Глобальная навигационная спутниковая система).
Уровень техники
Приемник с определением местоположения, например приемник Системы глобального позиционирования (GPS) или приемник GLONASS (Глобальная навигационная спутниковая система), оценивает положение, ориентацию (например, наклон, крен или рыскание) или то и другое у объекта или транспортного средства. Приемник с определением местоположения может столкнуться с неточными измерениями псевдодальности и фазы несущей, где приемник с определением местоположения принимает (например, кратковременно) один или более сигналов спутников со слабым уровнем сигнала или плохим качеством сигнала.
GLONASS (Глобальная навигационная спутниковая система) и GPS используют разные группировки спутников и разные схемы модуляции для соответствующих спутниковых передач. Группировка GLONASS включает в себя свыше двадцати спутников и транслирует сигналы на разных частотах в соответствии с модуляцией в множественном доступе с частотным разделением (FDMA) и планом повторного использования частоты, тогда как система GPS использует модуляцию с расширенным спектром или модуляцию в множественном доступе с кодовым разделением (CDMA), где частоты передачи обычно одинаковы для каждого спутника. Поскольку спутники GLONASS передают на разных частотах, что может привести к отличиям в распространении через ионосферу или тропосферу или другим ошибкам, приемник GLONASS с определением местоположения восприимчив к ошибке положения из межканального смещения, ассоциированного с разными частотами передачи у спутников.
Некоторые приемники с определением местоположения могут использовать фильтр с компенсацией погрешности (например, фильтр Калмана) для фильтрации, например, результатов измерений фазы несущей или обработанных данных измерения фазы несущей. Некоторые приемники с определением местоположения могут использовать методику Автономного контроля целостности в приемнике (RAIM) для обнаружения ошибок проанализированных измерений псевдодальности путем сравнения проанализированных измерений псевдодальности с эталонными измерениями псевдодальности, где ошибочные или отклоняющиеся измерения псевдодальности могут исключаться из решения о положении или ориентации, чтобы повысить точность оцененного положения или ориентации объекта или транспортного средства. Ни подход с фильтром с компенсацией погрешности, ни методика RAIM не решают полностью вышеупомянутую проблему неточных измерений псевдодальности и фазы несущей, где приемник с определением местоположения принимает (например, кратковременно) один или более сигналов спутников со слабым уровнем сигнала или плохим качеством сигнала.
Таким образом, существует потребность в приемнике с определением местоположения, который допускает использование сигналов передачи GPS и GLONASS для увеличения точности оценок положения и ориентации в реальном масштабе времени, компенсируя при этом ошибку смещения.
Раскрытие изобретения
В соответствии с одним вариантом осуществления, способ и система содержат первичное устройство измерения фазы для измерения фазы первой несущей у сигнала первой несущей (например, сигнала L1 GPS или "L1") и фазы второй несущей у сигнала второй несущей (например, сигнала L2 GPS или "L2"), принятых приемником с определением местоположения. Сигнал первой несущей (например, L1) передается по существу на одной и той же частоте от двух или более первичных спутников. Сигнал второй несущей (например, L2) передается по существу на одной и той же частоте от двух или более первичных спутников. Вторичное устройство измерения фазы измеряет фазу третьей несущей у сигнала третьей несущей (например, сигнала G1(K) GLONASS или "G1(K)") и фазу четвертой несущей у сигнала четвертой несущей (например, сигнала G2(K) GLONASS или "G2(K)"). Сигнал третьей несущей (например, G1(K)) принимается на разных частотах от двух или более вторичных спутников. Сигнал четвертой несущей (например, G2(K)) принимается на разных частотах от двух или более вторичных спутников, что приводит к межканальному смещению между сигналами несущей от разных вторичных спутников, наблюдаемых на приемнике с определением местоположения. Кинематический механизм реального масштаба времени оценивает первый набор целочисленных неопределенностей, ассоциированный с измеренной фазой первой несущей, и второй набор целочисленных неопределенностей, ассоциированный с измеренной фазой второй несущей. Кинематический механизм реального масштаба времени оценивает третий набор неопределенностей (например, третий набор целочисленных неопределенностей), ассоциированный с измеренной фазой третьей несущей, и четвертый набор неопределенностей (например, четвертый набор целочисленных неопределенностей), ассоциированный с измеренной фазой четвертой несущей. Компенсатор допускает компенсацию межканального смещения по меньшей мере в одном из третьего набора неопределенностей и четвертого набора неопределенностей путем моделирования прогнозирующего фильтра (например, фильтра Калмана) в соответствии со следующими входными данными или состояниями фильтра: данные о движении объекта (например, данные о положении, данные о скорости и данные об ускорении); данные о тропосфере (например, данные об остаточной тропосфере); данные об ионосфере; эталонный набор неопределенностей одной разности, ассоциированный с сигналами третьей несущей, принятыми в приемнике с определением местоположения и опорной станции от разных вторичных спутников (например, Неопределенность одной разности Опорного спутника G1(K) GLONASS или GLN Reference Sat. G1 SD Ambiguity), и эталонный набор неопределенностей одной разности, ассоциированный с сигналами четвертой несущей, принятыми в приемнике с определением местоположения и опорной станции от разных вторичных спутников (например, Неопределенность одной разности Опорного спутника G2(K) GLONASS или GLN Reference Sat. G2 SD Ambiguity). Устройство оценки допускает определение положения объекта на основе измеренной фазы первой несущей, измеренной фазы второй несущей, оцененного первого набора целочисленных неопределенностей, оцененного второго набора целочисленных неопределенностей, и по меньшей мере одной из измеренной фазы третьей несущей и измеренной фазы четвертой несущей и по меньшей мере одного из компенсированного третьего набора неопределенностей (например, компенсированного третьего набора целочисленных неопределенностей) и компенсированного четвертого набора неопределенностей (например, компенсированного четвертого набора целочисленных неопределенностей).
Краткое описание чертежей
Фиг. 1 - блок-схема первого варианта осуществления системы для оценивания положения с компенсацией смещения.
Фиг. 2 - блок-схема второго варианта осуществления системы для оценивания положения с компенсацией смещения.
Фиг. 3 - блок-схема третьего варианта осуществления системы для оценивания положения с компенсацией смещения.
Фиг. 4 - блок-схема четвертого варианта осуществления системы для оценивания положения с компенсацией смещения.
Фиг. 5 - блок-схема алгоритма первого примера способа оценивания положения с компенсацией смещения.
Фиг. 6 - блок-схема алгоритма второго примера способа оценивания положения с компенсацией смещения.
Фиг. 7 - блок-схема алгоритма третьего примера способа оценивания положения с компенсацией смещения.
Фиг. 8 - блок-схема алгоритма четвертого примера способа оценивания положения с компенсацией смещения.
Фиг. 9 - блок-схема алгоритма пятого примера способа оценивания положения с компенсацией смещения.
Фиг. 10 - блок-схема алгоритма шестого примера способа оценивания положения с компенсацией смещения.
Фиг. 11 - блок-схема алгоритма седьмого примера способа оценивания положения с компенсацией смещения.
Фиг. 12 - блок-схема алгоритма восьмого примера способа оценивания положения с компенсацией смещения.
Фиг. 13 - блок-схема алгоритма девятого примера способа оценивания положения с компенсацией смещения.
Фиг. 14 - блок-схема алгоритма десятого примера способа оценивания положения с компенсацией смещения.
Фиг. 15 - блок-схема алгоритма одиннадцатого примера способа оценивания положения с компенсацией смещения.
Фиг. 16 - блок-схема алгоритма двенадцатого примера способа оценивания положения с компенсацией смещения.
Осуществление изобретения
Фиг. 1 иллюстрирует приемник 10 с определением местоположения, который содержит первичный входной каскад 12 приемника, соединенный с первичной системой 14 обработки данных приемника, и вторичный входной каскад 13 приемника, ассоциированный с вторичной системой 16 обработки данных приемника. В одном варианте осуществления первичный входной каскад 12 приемника и вторичный входной каскад 13 приемника могут соединяться с антенной 15 с помощью разветвителя 11 (например, гибридная схема или фильтр) или другого устройства. Приемник 10 с определением местоположения ассоциирован с приемником 36 поправок. Приемник 36 поправок может быть включен в приемник 10 с определением местоположения или может взаимодействовать с приемником 10 с определением местоположения через порт данных. Приемник 36 поправок принимает поправочные данные (например, поправочные данные фазы опорной несущей) по меньшей мере от одной из опорной станции 40 и второй опорной станции 41.
Опорная станция 40 взаимодействует посредством радио- или электромагнитного сигнала с приемником 36 поправок, например, по каналу A связи (44). Вторая опорная станция 41 взаимодействует посредством радио- или электромагнитных сигналов с приемником 36 поправок через устройство 42 спутниковой связи, например, по каналу B связи (46). Устройство 42 спутниковой связи может содержать спутник связи, оборудованный приемником восходящей линии связи и передатчиком нисходящей линии связи для взаимодействия с одной или несколькими наземными станциями (например, подвижными или стационарными).
Хотя приемник 36 поправок иллюстрируется в виде одиночного приемника на фиг. 1, на практике приемник поправок может содержать двойной приемник для сигналов GPS и GLONASS, который поддерживает декодирование FDMA и CDMA, или два отдельных приемника для GPS и GLONASS.
Первичная система 14 обработки данных приемника может содержать любое из следующего: один или более аппаратных модулей, один или более электронных модулей, один или более программных модулей, процессор электронных данных, процессор электронных данных и ассоциированное хранилище электронных данных и универсальный компьютер для выполнения программируемых, логических или программных команд. Аналогичным образом вторичная система 16 обработки данных приемника может содержать любое из следующего: один или более аппаратных модулей, один или более электронных модулей, один или более программных модулей, процессор электронных данных, процессор электронных данных и ассоциированное хранилище электронных данных и универсальный компьютер для выполнения программируемых, логических или программных команд. Процессор электронных данных (то есть процессор данных) может содержать одно или более из следующего: микропроцессор, программируемая логическая матрица, цифровой процессор сигналов, специализированная интегральная схема, логическая схема или другое устройство для выполнения программируемых, логических, арифметических или программных команд.
На фиг. 1 первичная система 14 обработки данных приемника содержит первичный декодер 48 (например, декодер множественного доступа с кодовым разделением (CDMA)), первичное устройство 18 измерения фазы, кинематический механизм 20 реального масштаба времени (RTK) и устройство 28 хранения данных. Кинематический механизм реального масштаба времени (RTK) содержит процессор 22 данных, фильтр 24 с компенсацией погрешности (например, прогнозирующий фильтр или фильтр Калмана) и устройство 26 оценки (например, устройство оценки положения или устройство оценки положения и ориентации). Первичный декодер 48, первичное устройство 18 измерения фазы, кинематический механизм 20 реального масштаба времени, процессор 22 данных, фильтр 24 с компенсацией погрешности, устройство 26 оценки, устройство 28 хранения данных и первичный входной каскад 12 приемника могут взаимодействовать друг с другом и вторичной системой 16 обработки данных приемника по интерфейсу 38 данных.
На фиг. 1 вторичная система 16 обработки данных приемника содержит вторичный декодер 50 (например, декодер множественного доступа с частотным разделением (FDMA)), вторичное устройство 30 измерения фазы, компенсатор 32 смещения и устройство 34 оценки смещения. Вторичная система 16 обработки данных приемника содержит вторичный декодер 50 (например, декодер множественного доступа с частотным разделением (FDMA)), вторичное устройство 30 измерения фазы, компенсатор 32 смещения и устройство 34 оценки смещения, которые могут взаимодействовать друг с другом, вторичным входным каскадом 13 приемника и первичной системой 14 обработки данных приемника по интерфейсу 38 данных.
Интерфейс 38 данных может содержать одно или более из следующего: шина данных, электронное запоминающее устройство, совместно используемое запоминающее устройство, статические связи между программными модулями в первичной системе 14 обработки данных приемника, вторичной системе 16 обработки данных приемника или обеих; динамические связи между программными модулями в первичной системе 14 обработки данных приемника, вторичной системе 16 обработки данных приемника или обеих; приемопередатчики шины данных или другое программное обеспечение или аппаратные средства, которые поддерживают взаимодействие, отправку или прием данных между разными модулями или компонентами (48, 18, 20, 22, 24, 26, 28, 50, 30, 32 и 34) в первичной системе 14 обработки данных приемника и вторичной системе 16 обработки данных приемника.
Линии, которые соединяют или взаимосвязывают (прямо или косвенно) первичный входной каскад 12 приемника, первичный декодер 48, первичное устройство 18 измерения фазы, кинематический механизм 20 реального масштаба времени, процессор 22 данных, фильтр 24 с компенсацией погрешности, устройство 26 оценки и устройство 28 хранения данных, вторичный входной каскад 13 приемника, вторичный 50 декодер, вторичное устройство 30 измерения фазы, компенсатор 32 смещения и устройство 34 оценки смещения на фиг. 1, иллюстрируют логические информационные каналы, физические информационные каналы или те и другие. Логический информационный канал означает, например, виртуальный информационный канал или передачу данных между программными модулями или между одной или несколькими компьютерными программами. Физический информационный канал означает, например, линию передачи либо одну или более шин данных, которые поддерживают передачу данных, сигналов логического уровня, электрических сигналов или электромагнитных сигналов.
Первичный входной каскад 12 приемника может содержать любую подходящую схему для приема сигналов спутников, переданных одним или несколькими спутниками (например, навигационными спутниками GPS). Входной каскад 12 приемника может быть выполнен в виде приемника с расширенным спектром или приемника множественного доступа с кодовым разделением (CDMA), который допускает прием нескольких несущих, переданных одним или несколькими спутниками в группировке спутников. Например, входной каскад 12 приемника может содержать предусилитель или усилитель для усиления сигналов спутников, смеситель и генератор опорной частоты, где вход усилителя соединяется с антенной (например, антенной 15 или разветвителем 11), выход усилителя соединяется с одним входом смесителя, генератор опорной частоты соединяется с другим входом смесителя, а выход смесителя соединяется с первичной системой 14 обработки данных приемника или первичным устройством 18 измерения фазы. В одном пояснительном варианте осуществления аналого-цифровой преобразователь обеспечивает интерфейс между входным каскадом 12 приемника и первичной системой 14 обработки данных приемника. В другом пояснительном варианте осуществления вывод аналого-цифрового преобразователя дополнительно соединяется с буферным запоминающим устройством и приемопередатчиком порта данных.
Первичный декодер 48 содержит демодулятор (например, демодулятор CDMA) или другое устройство для демодуляции кода псевдослучайной последовательности (например, кода грубого сопровождения (C/A) или другого более точного гражданского или военного кодирования), который модулирует одну или более несущих. Сигнал несущей L1 GPS модулируется с кодом грубого сопровождения (C/A) и зашифрованным точным кодом P(Y), тогда как сигнал L2 GPS модулируется с зашифрованным кодом P(Y). В одном варианте осуществления декодер 48 может содержать генератор кода, соединенный с модулем входной задержки, где вывод модуля задержки соединяется с коррелятором для измерения корреляции между эталонным кодом псевдослучайной последовательности, который задерживается на известные приращения модулем задержки, и принятым кодом псевдослучайной последовательности из входного каскада 12 приемника. Первичный декодер 48 также может упростить декодирование навигационной информации, которая модулирует сигнал несущей, например, данные о положении небесных тел.
Первичная система 14 обработки данных приемника содержит первичное устройство 18 измерения фазы. Первичное устройство 18 измерения фазы содержит любое устройство, интегральную схему, электронный модуль или процессор данных для измерения фазы у сигнала несущей. Первичное устройство 18 измерения фазы измеряет или оценивает наблюдаемую фазу у одного или нескольких сигналов несущей, обеспеченных входным каскадом 12 приемника. Измеренная фаза может выражаться целочисленными длинами волн сигнала несущей, дробными длинами волн сигнала несущей и/или степенями сигнала несущей.
Первичное устройство 18 измерения фазы может определять одно или более из следующего: (1) первой составляющей измеренной фазы с дробными длинами волн сигнала первой несущей, сигнала второй несущей или обоих, и (2) второй составляющей измеренной фазы с целыми длинами волн сигнала первой несущей, сигнала второй несущей или обоих. Последняя вторая составляющая измеренной фазы может определяться счетчиком (например, счетчиком перехода через ноль), который подсчитывает переходы принятого, восстановленного или обработанного сигнала несущей, который пересекается с осью X в эталонной амплитуде (например, напряжении 0) во временной области, где X представляет время, а ось Y представляет амплитуду сигнала несущей. Однако первичное устройство 18 измерения фазы опирается на дальнейшую обработку в приемнике 10 с определением местоположения, чтобы определить или разрешить целочисленную неопределенность всего цикла, которая может привести к тому, что вторая составляющая измеренной фазы будет ошибочной или смещенной на целое количество циклов длины волны (например, чтобы оценить расстояние или диапазон между соответствующим спутником и приемником 10 с определением местоположения).
Кинематический механизм 20 реального масштаба времени (RTK) содержит механизм поиска, модуль разрешения неопределенности или другие программируемые команды для поиска или определения множеств решений целочисленной неопределенности для фазы одного или нескольких принятых сигналов несущей от нескольких спутников. Процессор 22 данных может выполнять программируемые команды, математические операции, логические операции или другие команды, обеспеченные, например, модулем разрешения неопределенности. В одном варианте осуществления механизм 20 RTK может задать или ограничить область поиска для множества решений целочисленной неопределенности, чтобы ограничить возможные множества решений неопределенности, которые оцениваются. Для механизма 20 RTK множества решений целочисленной неопределенности относятся к неопределенностям фаз целого цикла в фазе принятой несущей у принятых сигналов несущей (например, сигнала L1 GPS на частоте 1,57542 ГГц, сигнала L2 GPS на частоте 1,22760 ГГц или аналогичных сигналов), переданных, например, одним или несколькими спутниками. Механизм поиска может использовать методики наименьших квадратов или фильтрации Калмана для сокращения области поиска или достижения одного или нескольких решений набора неопределенностей для неопределенностей фаз целого цикла у сигналов несущей, переданных от спутников.
Вторичный входной каскад 13 приемника может содержать любую подходящую схему для приема сигналов спутников, переданных одним или несколькими спутниками (например, навигационными спутниками GLONASS). Вторичный входной каскад 13 приемника может быть выполнен в виде приемника множественного доступа с частотным разделением (FDMA), который допускает прием нескольких несущих, переданных одним или несколькими спутниками в группировке спутников. Например, вторичный входной каскад 13 приемника может содержать предусилитель или усилитель для усиления сигналов спутников, смеситель и генератор опорной частоты, где вход усилителя соединяется с антенной (например, антенной 15 или разветвителем 11), выход усилителя соединяется с одним входом смесителя, генератор опорной частоты соединяется с другим входом смесителя, а выход смесителя соединяется с вторичной системой 16 обработки данных приемника или вторичным устройством 30 измерения фазы. В одном пояснительном варианте осуществления аналого-цифровой преобразователь обеспечивает интерфейс между вторичным входным каскадом 13 приемника и вторичной системой 16 обработки данных приемника или интерфейсом 38 данных. В другом пояснительном варианте осуществления вывод аналого-цифрового преобразователя дополнительно соединяется с буферным запоминающим устройством и приемопередатчиком порта данных.
Вторичный декодер 50 содержит демодулятор (например, демодулятор FDMA) или другое устройство для демодуляции сигналов спутников GLONASS, которые модулируют одну или более несущих. Каждый спутник GLONASS допускает передачу сигналов GLONASS, которые содержат третью несущую, переданную в некотором подканале полосы L1 GLONASS, центрированной около 1,602 ГГц, и четвертую несущую, переданную в некотором подканале полосы L2 GLONASS, центрированной около 1,246 ГГц, где подканалы обычно отличаются для всех спутников в поле зрения приемника с определением местоположения в соответствии с планом повторного использования частоты. Третья несущая модулируется с псевдослучайным кодом определения дальности, навигационным сообщением и вспомогательной меандровой последовательностью. Четвертая несущая модулируется с псевдослучайным кодом определения дальности и вспомогательной меандровой последовательностью. Вторичный декодер 50 также может упростить декодирование навигационной информации, которая модулирует сигнал несущей, например, данные о положении небесных тел.
Вторичная система 16 обработки данных приемника содержит вторичное устройство 30 измерения фазы. Вторичное устройство 30 измерения фазы содержит любое устройство, интегральную схему, электронный модуль или процессор данных для измерения фазы у сигнала несущей. Вторичное устройство 30 измерения фазы измеряет или оценивает наблюдаемую фазу у одного или нескольких сигналов несущей, обеспеченных вторичным входным каскадом 13 приемника. Измеренная фаза может выражаться целочисленными длинами волн сигнала несущей, дробными длинами волн сигнала несущей и/или степенями сигнала несущей.
Вторичное устройство 30 измерения фазы может определять одно или более из следующего: (1) первой составляющей измеренной фазы с дробными длинами волн сигнала третьей несущей, сигнала четвертой несущей или обоих, и (2) второй составляющей измеренной фазы с целыми длинами волн сигнала третьей несущей, сигнала четвертой несущей или обоих. Последняя вторая составляющая измеренной фазы может определяться счетчиком (например, счетчиком перехода через ноль), который подсчитывает переходы принятого, восстановленного или обработанного сигнала несущей, который пересекается с осью X в эталонной амплитуде (например, напряжении 0) во временной области, где X представляет время, а ось Y представляет амплитуду сигнала несущей. Однако вторичное устройство 30 измерения фазы опирается на дальнейшую обработку в приемнике 10 с определением местоположения, чтобы определить или разрешить целочисленную неопределенность всего цикла, которая может привести к тому, что вторая составляющая измеренной фазы будет ошибочной или смещенной на целое количество циклов длины волны (например, чтобы оценить расстояние или диапазон между соответствующим спутником и приемником 10 с определением местоположения).
Кинематический механизм 20 реального масштаба времени (RTK) содержит механизм поиска, модуль разрешения неопределенности или другие программируемые команды для поиска или определения множеств решений целочисленной неопределенности для фазы одного или нескольких принятых сигналов несущей от нескольких спутников (GLONASS и GPS). В одном варианте осуществления механизм 20 RTK может задать или ограничить область поиска для множества решений целочисленной неопределенности, чтобы ограничить возможные множества решений неопределенности, которые оцениваются. Для кинематического механизма 20 реального масштаба времени множества решений целочисленной неопределенности относятся, например, к неопределенностям фаз целого цикла в фазе принятой несущей у принятых сигналов несущей (например, сигналов несущей спутника GLONASS), переданных одним или несколькими спутниками. Механизм поиска может использовать методики наименьших квадратов или фильтрации Калмана для сокращения области поиска или достижения одного или нескольких решений набора неопределенностей для неопределенностей фаз целого цикла у сигналов несущей, переданных от спутников.
Процессор 22 данных содержит процессор данных или другое устройство обработки данных для управления первичной системой 14 обработки данных приемника, вторичной системой 16 обработки данных приемника или обеими. Процессор 22 данных может выполнять любые исполняемые команды, арифметические операции, логические операции или выполнять другие задачи, необходимые приемнику с определением местоположения (например, 10), первичной системе обработки данных приемника (например, 14) или вторичной системе обработки данных приемника (например, 16).
В одной конфигурации процессор 22 данных содержит модуль выбора режимов, который определяет, работает ли приемник с определением местоположения в первичном режиме, вторичном режиме или в гибридном режиме. В первичном режиме первичная система 14 обработки данных приемника является активной, и приемник 10 с определением местоположения определяет свое положение относительно группировки спутников GPS. Во вторичном режиме вторичная система 16 обработки данных приемника и поддерживающая часть первичной системы 14 обработки данных приемника являются активными, и приемник 10 с определением местоположения определяет свое положение относительно группировки спутников GLONASS. В гибридном режиме первичная система 14 обработки данных приемника и вторичная система 16 обработки данных приемника являются активными, и приемник 10 с определением местоположения оценивает свое положение относительно группировки спутников GPS и группировки спутников GLONASS для повышенной точности, которая в противном случае была бы не доступна в отсутствие сигналов спутников GLONASS. В одном варианте осуществления процессор 22 данных может запретить один или более режимов работы в зависимости от подписки, приобретенной конечным пользователем приемника 10 с определением местоположения.
В одном варианте осуществления процессор 22 данных может содержать детектор надежности сигнала, который обеспечивает одно или более из следующего: количество сигналов спутников, принятых от группировки GPS, выше порогового уровня сигнала, количество сигналов спутников, принятых от группировки спутников GLONASS, выше порогового уровня сигнала, снижение точности (DOP), частота появления ошибочных разрядов, частота появления ошибочных слов или частота появления ошибочных кадров в декодированном коде грубого сопровождения сигнала L1 в сигнале GPS или декодированном стандартном коде в сигнале GLONASS, или другая добротность или уровень надежности одного или нескольких принятых сигналов спутников. Процессор 22 данных может определять (например, путем обращения к таблице соответствий, сохраненной в устройстве 28 хранения данных, или с помощью функции булевой логики или других программных команд, исполняемых процессором 22 данных), работать ли в первичном, вторичном или гибридном режиме, на основе надежности одного или нескольких принятых сигналов спутников (например, сигналов GPS, сигналов GLONASS или обоих).
В одной конфигурации процессор 22 данных дополнительно содержит управление кинематическим механизмом 20 реального масштаба времени или выводом кинематического механизма 20 реального масштаба времени. Процессор 22 данных может отправлять управляющие данные для активизации, деактивизации, сброса, повторной инициализации, запуска или остановки одного или нескольких из следующего: связанные с GLONASS состояния и входные данные, связанные с GPS состояния и входные данные, или все входные данные и состояния первичного кинематического механизма 20 реального масштаба времени. Процессор 22 данных управляет повторной инициализацией, сбросом, частичной повторной инициализацией, частичным сбросом, остановкой и запуском кинематического механизма 20 реального масштаба времени на основе того, выбирает ли процессор 22 данных первичный режим, вторичный режим или гибридный режим. При частичной повторной инициализации или сбросе механизм 20 RTK сохраняет связанные с GPS входные данные и состояния, инициализируя или сбрасывая только связанные с GLONASS входные данные и состояния, или наоборот. Частичная повторная инициализация может использоваться для очистки поврежденных состояний или входных данных, ассоциированных с измерениями фазы сигналов GPS, измерениями фазы сигналов GLONASS, тогда как полная повторная инициализация может использоваться для очистки поврежденных состояний или входных данных, ассоциированных с сигналами GPS и сигналами GLONASS.
В дополнительном варианте осуществления вышеупомянутая частичная повторная инициализация или сброс могут осуществляться с использованием отдельных прогнозирующих фильтров, где первый прогнозирующий фильтр используется исключительно для обработки сигналов GPS, а второй прогнозирующий фильтр используется для объединенной обработки сигналов GPS и GLONASS, чтобы избежать сбоя, где решения неопределенности GLONASS повреждаются, или прием сигналов спутников GLONASS не достаточно надежен в некотором периоде времени (например, одна или более эпох GPS).
Фильтр 25 с компенсацией погрешности выполнен в виде фильтра Калмана или его разновидности для сокращения или смягчения ошибок, например погрешности измерения. Фильтр Калмана может содержать устройство или схему прогнозирующей фильтрации, которое использует суммирование сигналов, задержку и обратную связь для обработки данных и компенсации влияний шума и неопределенности в измеренных данных или ином. Сброс или повторная инициализация могут относиться к одной и той же повторной инициализации состояний компенсации погрешности или фильтра Калмана.
Устройство 34 оценки смещения может оценивать смещение, которое может включать в себя, но не ограничивается, одно или более из следующих смещений: (a) межканальное смещение между разными несущими частотами, переданными от двух или более вторичных спутников (например, спутников GLONASS) и принятыми в приемнике с определением местоположения (например, 10) или опорной станции (например, 40 или 41), (b) смещение измерения фазы между разными измерениями фазы несущей в GLONASS, наблюдаемыми в приемнике с определением местоположения (например, 10) или опорной станции (например, 40 или 41), (c) смещение псевдокода между разными измерениями псевдодальности в GLONASS, наблюдаемыми в приемнике с определением местоположения (например, 10) или опорной станции (например, 40 или 41), (d) смещения тактовых импульсов спутника, ассоциированные с разными спутниками GLONASS, (e) аппаратное смещение или смещение обработки приемника (например, смещение тактовых импульсов приемника) между разными аппаратными конфигурациями приемников GLONASS (например, разные производители), и (f) аппаратное смещение и смещение обработки приемника, например, между первичным входным каскадом 12 приемника и вторичным входным каскадом 13 приемника.
Компенсатор 32 смещения готовит данные компенсации смещения для фильтра 24 с компенсацией погрешности, процессора 22 данных или кинематического механизма 20 реального масштаба времени, чтобы реагировать на оценки смещения, обеспеченные устройством 34 оценки смещения. Например, данные компенсации смещения могут содержать входные данные или состояния для фильтра 24 с компенсацией погрешности, ограничения на область поиска у механизма поиска в кинематическом механизме 20 реального масштаба времени или модификацию выходных решений устройства 26 оценки, фильтра 24 с компенсацией погрешности или обоих.
Опорная станция 40 содержит опорный приемник с определением местоположения в известном или неизменном местоположении, опорную систему обработки данных и передатчик или приемопередатчик. В одном варианте осуществления опорный приемник с определением местоположения обнаруживает данные о фазе несущей, ассоциированные с одним или несколькими сигналами несущей, и определяет начальное решение неопределенности или множество решений неопределенности для нескольких принятых сигналов спутников, где начальное решение неопределенности или множество решений неопределенности может применяться в приемнике 10 с определением местоположения. Опорная система обработки данных в опорной станции 40 принимает данные о фазе несущей и начальное решение неопределенности, корректирует их с использованием известного или неизменного местоположения опорного приемника с определением местоположения, чтобы определить улучшенное решение неопределенности. В одном примере скорректированные данные о фазе несущей содержат оцененную фазу несущей и улучшенное решение неопределенности или другие выведенные из них данные. В свою очередь скорректированные данные о фазе несущей передаются приемнику 36 поправок посредством радиосигнала или электромагнитного сигнала. Приемник 36 поправок принимает скорректированные данные о фазе несущей, которые доступны для использования по меньшей мере одним из кинематического механизма 20 реального масштаба времени, фильтра 24 с компенсацией погрешности или устройства 26 оценки, чтобы определить положение транспортного средства или объекта, ассоциированных с приемником 10 с определением местоположения.
Устройство 26 оценки содержит процессор данных или другое устройство обработки данных для оценивания положения, ориентации или того и другого у объекта или транспортного средства, ассоциированных с приемником 10 с определением местоположения. Устройство 26 оценки взаимодействует с оставшейся частью кинематического механизма 20 реального масштаба времени, компенсатором 32 смещения, устройством 34 оценки смещения и процессором 22 данных. Как только определяется множество решений целочисленной неопределенности, устройство 26 оценки или приемник 10 с определением местоположения могут использовать данные измерения фазы несущей, чтобы предоставить точную оценку расстояния или диапазона между каждым спутником и приемником 10 с определением местоположения на основе известной скорости распространения (то есть скорости света). В свою очередь диапазоны между тремя или более спутниками и приемником 10 с определением местоположения могут использоваться для оценки положения или ориентации приемника. Четыре спутника (например, навигационные спутники GPS) необходимо для определения трехмерного положения, которое включает в себя высоту относительно поверхности Земли. Чтобы определить ориентацию транспортного средства или объекта, ассоциированных с приемником 10 с определением местоположения, два положения транспортного средства оцениваются в непосредственной близости во времени, либо две отдельные антенны используются для приемника 10 с определением местоположения.
Устройство 26 оценки может использовать один или более следующих источников данных для определения оцененного положения или ориентации антенны приемника с определением местоположения либо ассоциированного объекта или транспортного средства: декодированный код псевдослучайной последовательности в сигналах спутников GPS, декодированный псевдослучайный код определения дальности в сигналах спутников GLONASS, данные измерения фазы несущей в сигналах спутников GPS, сигналах спутников GLONASS или обоих; зашифрованный точный код (например, код P(Y)) в сигналах спутников GPS (где разрешен органами государственной власти), точный код в сигналах спутников GLONASS (где разрешен органами государственной власти), код грубого сопровождения в сигналах спутников GPS, стандартный код точного сопровождения в сигналах спутников GLONASS, навигационная информация и данные неопределенности фаз целого цикла, данные компенсации смещения (например, от компенсатора 32 смещения) и данные о фазе несущей опорной станции (например, от опорной станции 40 или 41), где данные о фазе несущей опорной станции могут встраиваться в данные неопределенности фаз целого цикла.
В одном варианте осуществления устройство 26 оценки или процессор 20 данных может внести задержку в решения по координатам GPS (например, с помощью схем временной задержки или методик обработки данных), чтобы выровнять их с соответствующими решениями по координатам GLONASS для учета разновременностей обработки в приемнике 10 с определением местоположения, так что решения применяются по существу к одному и тому же положению объекта или транспортного средства в реальном масштабе времени.
Второй вариант осуществления приемника 110 с определением местоположения из фиг. 2 аналогичен первому варианту осуществления приемника 10 с определением местоположения из фиг. 1 за исключением того, что во втором варианте осуществления из фиг. 2 приемник 110 с определением местоположения содержит вторичную систему 116 обработки данных приемника с устройством 134 оценки смещения, которое дополнительно содержит контроллер 52 смещения кода и контроллер 54 смещения фазы. Одинаковые номера ссылок на фиг. 1 и фиг. 2 указывают одинаковые элементы.
Контроллер 52 смещения кода управляет или контролирует выполнение одного или нескольких уравнений, которые применяются для оценки или определения смещения кода или соответствующих данных компенсации кода для объединения первичных декодированных данных о положении, ассоциированных с кодом псевдослучайной последовательности (например, кодом грубого сопровождения) в системе спутников GPS, с вторичными декодированными данными о положении, ассоциированными с псевдослучайным кодом определения дальности (например, кодированными стандартными данными о положении) в системе спутников GLONASS.
В дополнительной негражданской конфигурации (например, в военной конфигурации) контроллер 52 смещения кода управляет или контролирует выполнение одного или нескольких уравнений, которые применяются для определения или оценки смещения кода или соответствующих данных компенсации кода для объединения первичных декодированных данных о положении, ассоциированных с кодом псевдослучайной последовательности (например, точным кодом или кодом P(Y)) в системе спутников GPS, с вторичными декодированными данными о положении, ассоциированными с псевдослучайным кодом определения дальности (например, кодированными высокоточными данными о положении) в системе спутников GLONASS.
Контроллер 54 смещения фазы управляет или контролирует выполнение одного или нескольких уравнений, которые применяются для оценки или определения смещения фазы или соответствующих данных компенсации фазы для объединения первичных данных измерения фазы (например, от первичного устройства 18 измерения фазы) в системе спутником GPS с вторичными данными измерения фазы (например, от вторичного устройства 30 измерения фазы) в системе спутников GLONASS. Например, контроллер 54 смещения фазы может управлять использованием измерений фазы с одной разностью или двойной разностью для повышения точности определения положения путем поддержки объединения или использования сигналов спутников GPS и сигналов спутников GLONASS устройством 26 оценки, чтобы определить по меньшей мере одно из положения или ориентации приемника 110 с определением местоположения, его антенны либо транспортного средства или прикрепленного к нему объекта.
Третий вариант осуществления приемника 210 с определением местоположения из фиг. 3 аналогичен второму варианту осуществления приемника 110 с определением местоположения из фиг. 2 за исключением того, что приемник 210 с определением местоположения из фиг. 3 содержит устройство 234 оценки смещения. Одинаковые номера ссылок на фиг. 1, фиг. 2 и фиг. 3 указывают одинаковые элементы.
Устройство 234 оценки смещения содержит контроллер 52 смещения кода, контроллер 54 смещения фазы, модуль 60 инициализации/сброса, калибратор 64 и устройство 68 оценки качества.
Модуль 60 инициализации/сброса содержит команды или логику для установления начальных данных смещения в соответствии с процедурой инициализации смещения, которая работает в первом режиме или втором режиме, где в первом режиме к сохраненным данным смещения обращаются или извлекают из таблицы соответствий, сохраненной в устройстве хранения данных (энергонезависимом RAM), ассоциированном с приемником с определением местоположения, чтобы заполнить первичный кинематический механизм реального масштаба времени, где во втором режиме сохраненные данные смещения обеспечивают начальные грубые данные, содержащие предварительно запрограммированное смещение по умолчанию, ассоциированное с соответствующими аппаратными средствами приемника с определением местоположения.
Устройство 234 оценки смещения содержит команды или программное обеспечение для назначения временных отметок соответствующим измерениям фазы несущей с одной разностью или измерениям кода псевдослучайной последовательности, ассоциированным с вторичными спутниками, и ассоциированным дисперсиям.
Калибратор 64 содержит программный модуль, аппаратный модуль или их сочетание для калибровки компенсации межканального смещения в соответствии с калибровкой с одной разностью, чтобы учитывать изменения в спутниках, принятых или доступных приемнику с определением местоположения, путем преобразования остатков после подгонки с двойной разностью в остатки с одной разностью. Например, калибратор может быть выполнен в виде арифметико-логического устройства в процессоре данных, например в процессоре 22 данных.
Устройство 68 оценки качества содержит программный модуль, электронный модуль или оба для контроля уровня качества у коэффициента компенсации. В конфигурации устройство оценки качества основывает уровень качества на том, имеется ли значительный скачок или резкое изменение в величине коэффициента компенсации за период времени выборки. В другой конфигурации устройство оценки качества основывает уровень качества на возникновении значительного скачка и на том, отмечает ли алгоритм RAIM решение по коду с одной разностью или решение по фазе несущей с одной разностью как ненадежное.
Четвертый вариант осуществления приемника 310 с определением местоположения из фиг. 4 аналогичен третьему варианту осуществления приемника 210 с определением местоположения из фиг. 3 за исключением того, что вторичная система 316 обработки данных приемника из фиг. 4 дополнительно содержит фильтр 70 (например, фильтр нижних частот). Одинаковые номера ссылок на фиг. с 1 по 4 включительно указывают одинаковые элементы.
Фильтр 70 имеет вход, соединенный с устройством 234 оценки смещения (или компенсатором 32 смещения), и вывод, связанный по меньшей мере с одним из механизма 20 RTK, процессора 22 данных, фильтра 24 с компенсацией погрешности, устройства 26 оценки и устройства 28 хранения данных.
Фиг. 5 раскрывает блок-схему алгоритма в соответствии с первым примером оценивания положения, ориентации или того и другого у объекта или транспортного средства с компенсацией смещения, чтобы поддерживать объединенное использование спутниковых передач Системы глобального позиционирования (GPS) и спутниковых передач GLONASS (Глобальная навигационная спутниковая система). Способ из фиг. 5 начинается на этапе S500.
На этапе S500 первичная система 14 обработки данных приемника или первичное устройство 18 измерения фазы измеряет фазу первой несущей (например, сигнал L1 GPS) и фазу второй несущей (например, сигнал L2 GPS), принятые приемником с определением местоположения (например, 10, 110, 210 или 310), где несущие принимаются от двух или более первичных спутников (например, спутников GPS). Приемник с определением местоположения (например, 10, 110, 210 или 310) устанавливается или ассоциируется с объектом или транспортным средством, или является инструментом, ассоциированным с транспортным средством.
На этапе S502 вторичная система 16 обработки данных приемника или вторичное устройство 30 измерения фазы измеряет фазу третьей несущей у сигнала третьей несущей (например, сигнала G1(K) или сигнала поддиапазона L1 GLONASS) и фазу четвертой несущей у сигнала четвертой несущей (например, сигнала G2(K) или сигнала поддиапазона L2 GLONASS), принятых приемником с определением местоположения (10, 110, 210 или 310), где третья и четвертая несущие принимаются от вторичных спутников на разных частотах от двух или более вторичных спутников, что приводит к межканальному смещению между сигналами несущей от разных вторичных спутников, наблюдаемых в приемнике с определением местоположения (10, 110, 210 или 310).
Спутники в группировках GLONASS и GPS передают сигналы по двум разным полосам, называемым L1 и L2. Поддиапазоны для полос L1 и L2 могут называться G1 и G2 для группировки GLONASS. В системе GLONASS каждому спутнику обычно выделяется конкретная частота или поддиапазон в полосе, заданные следующими выражениями:
G1(K)=1602 МГц+K*9/16 МГц в полосе L1 и
G2(K)=1246 МГц+K*7/16 МГц в полосе L2,
где K - номер частоты (частотный канал) сигналов, переданных спутниками GLONASS в поддиапазонах G1 и G2 соответственно. На дату составления этого документа спутники GLONASS использовали частотные каналы в диапазоне K=(-7 до +6). Спутники GLONASS, запущенные с 2005 г., используют фильтры, которые ограничивают внеполосные излучения границей критической помехи, содержащейся в Рекомендации 769 CCIR для полос 1610,6 МГц-1613,8 МГц и 1660 МГц-1670 МГц.
Если наблюдения GLONASS включаются для повышения эффективности RTK GPS в приемнике с определением местоположения (10, 110, 210 или 310), то значительные межканальные смещения GLONASS могут существовать в наблюдениях псевдодальности и фазы несущей GLONASS. Межканальные смещения происходят из-за различий в распространении сигналов, аппаратных изменений, различий в обработке сигналов и других факторов, на которые влияют разные частоты сигналов, принятые от спутников GLONASS. Из-за межканальных смещений мгновенное разрешение неопределенности в наблюдениях фазы несущей GLONASS с помощью современных методик GPS становится достаточно сложным и может даже потерпеть неудачу, если игнорировать межканальные смещения GLONASS. Дополнительные препятствия возникают там, где опорная станция (например, 40 или 41) и приемник с определением местоположения (например, 10, 110, 210 или 310) изготавливаются разными производителями (или даже когда используются разные модели от одного производителя). Приемник с определением местоположения (например, 10, 110, 210 или 310) и опорная станция (40 или 41) могут содержать приемные схемы (например, сверхвысокочастотные фильтры или усилители), которые отличаются или могут не соответствовать равномерной задержке во всей полосе пропускания сигналов L1 и L2 GLONASS. Иногда приемные схемы используют разные задающие генераторы для приемных схем GPS и GLONASS, что можно учитывать для надлежащей обработки.
На этапе S504 процессор 22 данных или кинематический механизм 20 реального масштаба времени оценивает первый набор целочисленных неопределенностей, ассоциированный с измеренной фазой первой несущей, и второй набор целочисленных неопределенностей, ассоциированный с измеренной фазой второй несущей. Этап S504 может выполняться в соответствии с различными дополнительными методиками, которые могут применяться по отдельности или совокупно. В первой методике в одном варианте осуществления процессор данных или механизм 20 RTK может оценивать первый набор целочисленных неопределенностей и второй набор целочисленных неопределенностей, если качество сигнала у сигналов несущей GPS, принятых в приемнике с определением местоположения (например, 10, 110, 210 или 310), больше порогового уровня качества сигнала (например, определенного в первичном входном каскаде 12 приемника, первичном декодере 48 или первичном устройстве 18 измерения фазы) по меньшей мере для минимального количества спутников в группировке GPS.
Во второй методике процессор 22 данных или кинематический механизм 20 реального масштаба времени оценивает первый набор целочисленных неопределенностей и второй набор целочисленных неопределенностей с помощью некоторого процесса (например, процесса поиска, процесса решения методом наименьших квадратов или процесса решения методом взвешенных наименьших квадратов) и с помощью вычисления эталонного набора неопределенностей двойной разности, ассоциированного с сигналами первой несущей от разных первичных спутников (например, GPS L1 DD Ambiguity). Дополнительно процессор 22 данных или кинематический механизм 20 реального масштаба времени оценивает первый набор целочисленных неопределенностей и второй набор неопределенностей путем вычисления эталонного набора неопределенностей двойной разности, ассоциированного с сигналами второй несущей от разных вторичных спутников (например, GPS L2 DD Ambiguity).
"Двойная разность", "DD или "с двойной разностью" относится к математической операции, которая может применяться к измерениям фазы несущей или псевдодальности. Здесь на этапе S504 операции двойной разности могут применяться к неопределенностям плавающей фазы несущей или неопределенностям неподвижной фазы несущей GPS. Двойная разность может определяться путем вычитания двух измерений фазы несущей GPS одной разности между приемником с определением местоположения и опорным приемником с определением местоположения (например, опорной станцией 40 или 41) относительно одного и того же сигнала спутника от двух разных спутников. Операция двойной разности используется для уменьшения или улучшения ошибки датчика синхроимпульсов спутника GPS и смещения распространения сигнала в атмосфере.
На этапе S506 процессор 22 данных или кинематический механизм 20 реального масштаба времени оценивает третий набор неопределенностей (например, третий набор целочисленных неопределенностей), ассоциированный с измеренной фазой третьей несущей, и четвертый набор неопределенностей (например, четвертый набор целочисленных неопределенностей), ассоциированный с измеренной фазой четвертой несущей. Этап S506 может выполняться в соответствии с различными дополнительными методиками, которые могут применяться по отдельности или совокупно. В первой методике процессор данных или механизм 20 RTK может оценивать третий набор неопределенностей и четвертый набор неопределенностей, если качество сигнала у сигналов несущей GLONASS, принятых в приемнике с определением местоположения (10, 110, 210 или 310), больше порогового уровня качества сигнала (например, определенного во вторичном входном каскаде 13 приемника, вторичном декодере 50 или вторичном устройстве 30 измерения фазы) по меньшей мере для минимального количества спутников в группировке GLONASS. На этапе S506 процессор 22 данных или кинематический механизм 20 реального масштаба времени хорошо подходит для разрешения неопределенностей (например, целочисленных неопределенностей) в измеренной фазе третьей несущей и фазе четвертой несущей, где межканальное смещение учитывается, например, до, после или одновременно с разрешением неопределенностей в сочетании с этапом S508.
Во второй методике для выполнения этапа S506 процессор 22 данных или кинематический механизм 20 реального масштаба времени оценивает третий набор неопределенностей (например, третий набор целочисленных неопределенностей) и четвертый набор неопределенностей (например, четвертый набор целочисленных неопределенностей) в процессе (например, процессе решения или поиска), который включает в себя применение операций одной разности, операций двойной разности или обеих к измеренной фазе третьей несущей и измеренной фазе четвертой несущей. Третий набор неопределенностей и четвертый набор неопределенностей из этапа S506 могут представлять частные решения, итерационные решения, промежуточные решения или полные решения для третьего набора целочисленных неопределенностей и четвертого набора целочисленных неопределенностей в фазе третьей несущей и фазе четвертой несущей. Например, начальное или частное решение набора неопределенностей может опираться на частное решение (например, полуцелое решение или решение с межканальным смещением) или измерения фазы несущей GPS, чтобы задать область поиска для оптимального решения третьей целочисленной неопределенности и четвертой целочисленной неопределенности GLONASS. Если результатом этапа S506 является частное решение, итерационное решение или промежуточное решение, то полное решение с компенсированным смещением для периода времени (например, эпохи) в конечном счете определяется в реальном масштабе времени процессором 22 данных или кинематическим механизмом реального масштаба времени в сочетании, например, с этапом S508. Полное решение с компенсированным смещением, которое учитывает межканальное смещение, может называться компенсированным третьим набором целочисленных неопределенностей и компенсированным четвертым набором целочисленных неопределенностей. Процессор 22 данных или кинематический механизм 20 реального масштаба времени хорошо подходит для разрешения неопределенностей (например, целочисленных неопределенностей) измеренной фазы третьей несущей и фазы четвертой несущей в реальном масштабе времени, где межканальное смещение (например, с этапа S508) учитывается до, после или одновременно с разрешением неопределенностей (например, на этапе S506).
Межканальное смещение при измерении фазы несущей часто реализуется из-за схемы модуляции FDMA, в которой каждый спутник GLONASS передает на разной частоте или поддиапазоне в полосе L1 и L2 GLONASS. Приемник с определением местоположения (10, 110, 210 или 310) восприимчив к межканальному смещению, которое относится к частотно-зависимому смещению в вышеупомянутых измерениях фазы третьей и четвертой несущей. Кроме того, межканальное смещение также может включать в себя смещение кода псевдодальности, которое не рассматривается в способе из фиг. 5, но к нему обращаются где-то в другом месте в этом документе.
На этапе S508 фильтр 24 с компенсацией погрешности (например, прогнозирующий фильтр или фильтр Калмана) или кинематический механизм реального масштаба времени компенсирует межканальное смещение по меньшей мере в одном из третьего набора целочисленных неопределенностей и четвертого набора целочисленных неопределенностей путем моделирования фильтра 24 с компенсацией погрешности в соответствии с одним или несколькими из следующих входных данных или состояний фильтра: данные о движении (например, данные о положении объекта, данные о скорости объекта, данные об ускорении объекта), данные о тропосфере (например, данные об остаточной тропосфере), данные об ионосфере, эталонный набор неопределенностей одной разности, ассоциированный с сигналами третьей несущей от разных вторичных спутников (например, неопределенность одной разности опорного спутника G1(K) GLONASS), наблюдаемых в приемнике с определением местоположения (10, 110, 210 или 310) и опорной станции (например, 40 или 41), и эталонный набор неопределенностей одной разности, ассоциированный с сигналами четвертой несущей от разных вторичных спутников (например, неопределенность одной разности опорного спутника G2(K) GLONASS), наблюдаемых в приемнике с определением местоположения (10, 110, 210 или 310) и опорной станции (например, 40 или 41).
"Первая разность", "SD" или "с одной разностью" должна относиться к математической операции одной разности, которая может применяться к измерениям фазы несущей или псевдодальности, наблюдаемым в приемнике с определением местоположения (10, 110, 210 или 310) и опорной станции (40 или 41). По отношению к измерениям GLONASS первая разность определяется путем вычитания измерений (например, измерений фазы третьей несущей или измерений фазы четвертой несущей) между приемником с определением местоположения и опорной станцией (то есть опорным приемник с определением местоположения) относительно одного и того же сигнала спутника. Вообще, первая разность основывается на первом измерении (например, измерении фазы несущей у первой несущей, второй несущей, третьей несущей или четвертой несущей) конкретного сигнала спутника (например, от конкретного спутника) в приемнике с определением местоположения (10, 110, 210 или 310) и втором измерении (например, измерении фазы несущей у той же первой несущей, второй несущей, третьей несущей или четвертой несущей) конкретного сигнала спутника в опорной станции (например, опорной станции 40 или 41), где первое измерение вычитается из второго измерения, или наоборот. Первое измерение и второе измерение обычно проводятся в течение одной и той же эпохи или другого подходящего периода времени, в котором измерения фазы несущей одного и того же сигнала несущей достаточно коррелируются.
Фаза несущей с одной разностью, наблюдаемая между двумя приемниками, отслеживающими один и тот же спутник, может выражаться в виде:

где  - наблюдаемая фаза несущей с одной разностью, выраженная в единицах циклов;
- наблюдаемая фаза несущей с одной разностью, выраженная в единицах циклов;  и
и  - длина волны и частота несущей;
- длина волны и частота несущей;  - целочисленная неопределенность с одной разностью; c - скорость света;
- целочисленная неопределенность с одной разностью; c - скорость света;  - ионосферная задержка с одной разностью, где I - функция Полной концентрации электронов;
- ионосферная задержка с одной разностью, где I - функция Полной концентрации электронов;  - тропосферная задержка с одной разностью; и
- тропосферная задержка с одной разностью; и  - шум наблюдения фазы несущей;
- шум наблюдения фазы несущей;  - геометрическое расстояние с одной разностью;
- геометрическое расстояние с одной разностью;  - разница между двумя смещениями тактовых импульсов приемника; и
- разница между двумя смещениями тактовых импульсов приемника; и  - межканальное смещение для измерений фазы несущей с одной разностью (SD); и k представляет частоту L1 или L2 GPS или G1 или G2 GLONASS.
- межканальное смещение для измерений фазы несущей с одной разностью (SD); и k представляет частоту L1 или L2 GPS или G1 или G2 GLONASS.  не одинаково для разных спутников GLONASS, или когда приемники от разных производителей или разные типы от одного производителя используются для базовых и рабочих приемников RTK.
не одинаково для разных спутников GLONASS, или когда приемники от разных производителей или разные типы от одного производителя используются для базовых и рабочих приемников RTK.
В одном варианте осуществления измерения фазы одной разности могут использоваться для уравновешивания ошибки датчика синхроимпульсов спутника и смещения распространения сигнала в атмосфере (например, ионосферного смещения, но не обязательно тропосферного смещения). В другом варианте осуществления, если устройство оценки смещения (34, 134 или 234) может надежно оценить межканальное смещение, то процессор 22 данных, фильтр 24 с компенсацией погрешности или кинематический механизм 20 реального масштаба времени могут использовать измерения фазы одной разности в качестве первичного источника информации для определения надежных множеств решений неопределенности фазы несущей для третьего набора целочисленных неопределенностей и четвертого набора целочисленных неопределенностей (например, на этапе S506 или иным образом).
Современное аппаратное исполнение части GPS у приемника с определением местоположения стремится обеспечить по существу одинаковые (например, почти одинаковые) межканальные смещения фазы несущей для разных спутников GPS на частоте L1 и по существу одинаковые межканальные смещения фазы несущей для разных спутников GPS на частоте L2. Однако смещения L2 GPS отличаются от смещений L1 GPS. В отличие от этого современное аппаратное исполнение части GLONASS у приемника с определением местоположения обычно нагружается разными межканальными смещениями для разных частот G1(K) GLONASS, которые обозначаются как  для кода. Существует разные межканальные смещения для разных частот G2 GLONASS (и отличные от межканального смещения для частот G1(K) GLONASS), которые обозначаются как
для кода. Существует разные межканальные смещения для разных частот G2 GLONASS (и отличные от межканального смещения для частот G1(K) GLONASS), которые обозначаются как  для кода. Когда приемник с определением местоположения (10, 110, 210 или 310) и базовые приемники (например, опорные станции 40 или 41) относятся к разным производителям или разным типам, межканальные смещения
для кода. Когда приемник с определением местоположения (10, 110, 210 или 310) и базовые приемники (например, опорные станции 40 или 41) относятся к разным производителям или разным типам, межканальные смещения  и
и  не останутся равными нулю. Как правило, межканальные смещения GLONASS демонстрируют разный характер постоянного смещения для разных спутников GLONASS за короткий период времени. Межканальные смещения GLONASS могут медленно меняться для одного и того же типа приемника из-за изменений компонентов, срока службы, изменения температуры или других факторов.
не останутся равными нулю. Как правило, межканальные смещения GLONASS демонстрируют разный характер постоянного смещения для разных спутников GLONASS за короткий период времени. Межканальные смещения GLONASS могут медленно меняться для одного и того же типа приемника из-за изменений компонентов, срока службы, изменения температуры или других факторов.
Из-за разных частот сигналов для спутников GLONASS широко применяемую процедуру двойной разности для обработки данных о фазе несущей GPS нельзя реализовать в ее прямом виде для измерений фазы третьей несущей и фазы четвертой несущей GLONASS. Этап S508 может поддерживать процедуры двойной разности, где межканальное смещение, смещение тактовых импульсов приемника, проскальзывание цикла и другие технические соображения решаются должным образом. Способ из фиг. 7 описывает несколько пояснительных методик для применения процедур двойной разности на этапе S507, которые могут применяться, например, в сочетании с этапом S508 или иным образом.
На этапе S510 устройство 26 оценки или первичная система 14 обработки данных приемника оценивает положение объекта на основе измеренной фазы первой несущей, измеренной фазы второй несущей, оцененного первого набора целочисленных неопределенностей, оцененного второго набора целочисленных неопределенностей и по меньшей мере одной из измеренной фазы третьей несущей и измеренной фазы четвертой несущей, и по меньшей мере одного из компенсированного третьего набора целочисленных неопределенностей и компенсированного четвертого набора целочисленных неопределенностей.
Способ из фиг. 6 аналогичен способу из фиг. 5 за исключением того, что способ из фиг. 6 дополнительно содержит этап S512. Этап S512 может выполняться, например, до, после или одновременно с этапом S510. Одинаковые номера ссылок на фиг. 5 и фиг. 6 указывают одинаковые этапы или процедуры.
На этапе S512 вторичный декодер 50 декодирует псевдослучайный код определения дальности, кодированный в сигнале третьей несущей и сигнале четвертой несущей; где компенсация дополнительно содержит компенсацию межканального смещения (например, межканального смещения кода), ассоциированного по меньшей мере с одним из декодированного псевдослучайного кода определения дальности, ассоциированного с сигналом третьей несущей или сигналом четвертой несущей. В одном примере измерения кода псевдодальности с одной разностью определяются для оценки межканального смещения кода.
Функциональная модель измерения псевдодальности имеет форму, аналогичную модели фазы несущей (отметим, что используется аналогичная нотация, но смещение кода может иметь иной смысл, чем в случае для измерений фазы несущей):

где  представляет межканальное смещение кода, а
представляет межканальное смещение кода, а  - шум псевдодальности.
- шум псевдодальности.
Нужно больше описания для членов  и
и  , так как они представляют как разницу между системами GPS и GLONASS, так и межканальное или частотное смещения между разными частотами. Следует отметить, что все зависимые от спутников смещения, например ошибка датчика синхроимпульсов спутника, аннулируются после вычисления разности между двумя приемниками.
, так как они представляют как разницу между системами GPS и GLONASS, так и межканальное или частотное смещения между разными частотами. Следует отметить, что все зависимые от спутников смещения, например ошибка датчика синхроимпульсов спутника, аннулируются после вычисления разности между двумя приемниками.
Для современных приемников с определением местоположения существуют почти одинаковые межканальные смещения кода для разных спутников GPS на частоте L1. Аналогичным образом, существуют почти одинаковые межканальные смещения кода для разных спутников GPS на частоте L2. Однако смещения L2 отличаются от смещений L1. Если частоты L1 и L2 GPS выбираются как опорные частоты, то смещение тактовых импульсов приемника определяется с использованием измерений псевдодальности на этих частотах и обозначается как  . и
. и  для частот L1 и L2 GPS тогда остаются равными нулю.
для частот L1 и L2 GPS тогда остаются равными нулю.
Однако межканальные смещения нужно принимать во внимание для измерений псевдодальности GLONASS, особенно для разных производителей и/или типов приемников. Существуют разные межканальные смещения для разных частот G1 GLONASS, которые обозначаются как  для кода. Существует разные межканальные смещения для разных частот G2 GLONASS (и отличные от межканального смещения для частот G1 GLONASS), которые обозначаются как
для кода. Существует разные межканальные смещения для разных частот G2 GLONASS (и отличные от межканального смещения для частот G1 GLONASS), которые обозначаются как  для кода.
для кода.
Способ из фиг. 7 аналогичен способу из фиг. 5 за исключением того, что способ из фиг. 7 дополнительно содержит этап S507. Этап S507 может выполняться, например, после или одновременно с этапом S506. Одинаковые номера ссылок на фиг. 5-7 указывают одинаковые этапы или процедуры.
На этапе S507 устройство оценки смещения (например, 34, 134 или 234) оценивает межканальное смещение из фазы несущей с двойной разностью в сигнале третьей несущей или сигнале четвертой несущей и псевдодальности с двойной разностью в сигнале третьей несущей и сигнале четвертой несущей, где оценка остается действительной до проскальзывания цикла.
"Двойная разность" или "с двойной разностью" относится к математической операции, которая может применяться к измерениям фазы несущей или псевдодальности. Операции двойной разности могут применяться к неопределенностям плавающей фазы несущей или неопределенностям неподвижной фазы несущей. Двойная разность может определяться путем вычитания двух измерений одной разности между приемником с определением местоположения и опорным приемником с определением местоположения (например, опорной станцией 40 или 41) относительно одного и того же сигнала спутника от двух разных спутников. Операция двойной разности используется для уменьшения или улучшения ошибки датчика синхроимпульсов спутника и смещения распространения сигнала в атмосфере.
В дополнительном варианте осуществления двойная разность может определяться путем вычитания двух измерений одной разности между приемником с определением местоположения и опорным приемником с определением местоположения относительно двух сигналов спутников от одного и того же спутника, измеренных в разные эпохи.
На этапе S507 и в более общем смысле решения неопределенности двойной разности и оценки межканального смещения могут быть подвержены многолучевому распространению и проскальзываниям цикла. Проскальзывание цикла относится к разрывности измерения фазы несущей у сигнала несущей, вызванной потерей синхронизма при отслеживании сигналов в приемнике с определением местоположения. Например, проскальзывание цикла может содержать полный целочисленный переход цикла или частичный переход цикла в неопределенности фазы несущей. Проскальзывание цикла может быть вызвано препятствиями, которые препятствуют распространению сигнала и приему одного или нескольких сигналов спутников в приемнике с определением местоположения. Приемник с определением местоположения обнаруживает потерю синхронизма путем обнаружения внезапного скачка или перехода в неопределенности фазы несущей или из расхождения между измеренными фазами в приемнике с определением местоположения и опорном приемнике. В случае проскальзывания цикла кинематический механизм 20 реального масштаба времени или фильтр 24 с компенсацией погрешности может повторно инициализировать и перезапустить оценку неопределенности, что может привести к недостающим данным, что можно решить с помощью данных точного расчета от дополнительных датчиков (например, акселерометров, одометров или иных), пока приемник с определением местоположения повторно не получит решение неопределенности фазы несущей и/или свое точное положение.
Определения фазы с двойной разностью на этапе S507 могут выполняться в соответствии с несколькими методиками, которые могут применяться по отдельности или совокупно. В первой методике процессор 22 данных или кинематический механизм 20 реального масштаба времени оценивает межканальное смещение, ассоциированное с третьим набором неопределенностей (например, третьим набором целочисленных неопределенностей) и четвертым набором неопределенностей (например, четвертым набором целочисленных неопределенностей) или их предшественником, путем вычисления набора неопределенностей с двойной разностью, ассоциированного с парой сигналов третьей несущей от разных вторичных спутников (GLN Sat. G1 DD Ambiguity), и вычисления набор неопределенностей с двойной разностью, ассоциированного с парой сигналов четвертой несущей от разных вторичных спутников (GLN Sat. G2 DD Ambiguity). Оцененные наборы неопределенности с двойной разностью или их оцененные предшественники затем сравниваются с основанным на SD оцененным третьим набором целочисленных неопределенностей и основанным на SD оцененным четвертым набором целочисленных неопределенностей, выведенными из эталонных измерений одной разности фазы несущей (например, Неопределенность одной разности опорного спутника G1 GLONASS и Неопределенность одной разности опорного спутника G2 GLONASS), чтобы предоставить оценку межканального смещения, которая дополняется дополнительными данными межканального смещения. Дополнительные данные межканального смещения включают в себя, но не ограничивается, постоянный член межканального смещения, ассоциированный с аппаратными средствами приемника с определением местоположения, и изменяющиеся во времени члены специфичного для спутника смещения, ассоциированные с конкретным списком частот спутников GLONASS, принятых в приемнике с определением местоположения в любое заданное время. Члены специфичного для спутника смещения могут ссылаться на частоту опорного спутника в полосе G1 и G2 (например, центральные частоты G1 или G2), которая используется, например, для вышеупомянутых эталонных определений одной разности.
Во второй методике для определений двойной разности GLONASS (например, фазы несущей или кода) ошибки датчика тактовых импульсов приемника или другое межканальное смещение (например, между приемником с определением местоположения (10, 110, 210 или 310) и опорной станцией (40 или 41)) могут не уравновешиваться или не быть незначительными, и могут уже не моделироваться или приблизительно выражаться как целые кратные. Ошибки датчика синхроимпульсов (между разными спутниками GLONASS) не аннулируются из-за разных частот передачи у спутников GLONASS и дифференциальных аппаратных задержек, специфических для каждой частоты спутника. Соответственно, определение двойной разности GLONASS может дополняться членом смещения тактовых импульсов или другим членом межканального смещения. Член смещения тактовых импульсов может содержать дополнительные данные межканального смещения, которые могут использоваться в сочетании с первой методикой.
Если выбираются четыре опорных спутника для L1 GPS, L2 GPS, G1 GLONASS и G2 GLONASS, то наблюдаемую с двойной разностью в единицах метров можно сформировать как в Уравнении (1):

где  - первая наблюдаемая фаза несущей с одной разностью, выраженная в единицах циклов,
- первая наблюдаемая фаза несущей с одной разностью, выраженная в единицах циклов,  - вторая наблюдаемая фаза несущей с одной разностью, выраженная в единицах циклов;
- вторая наблюдаемая фаза несущей с одной разностью, выраженная в единицах циклов;  и
и  - длина волны и частота соответственно у сигнала несущей, ассоциированного с первой наблюдаемой фазой несущей с одной разностью;
- длина волны и частота соответственно у сигнала несущей, ассоциированного с первой наблюдаемой фазой несущей с одной разностью;  и
и  - длина волны и частота соответственно у сигнала несущей, ассоциированного со второй наблюдаемой фазой несущей с одной разностью;
- длина волны и частота соответственно у сигнала несущей, ассоциированного со второй наблюдаемой фазой несущей с одной разностью;  - первая целочисленная неопределенность с одной разностью, ассоциированная с первой наблюдаемой фазой несущей с одной разностью;
- первая целочисленная неопределенность с одной разностью, ассоциированная с первой наблюдаемой фазой несущей с одной разностью;  - вторая целочисленная неопределенность с одной разностью, ассоциированная со второй наблюдаемой фазой несущей с одной разностью;
- вторая целочисленная неопределенность с одной разностью, ассоциированная со второй наблюдаемой фазой несущей с одной разностью;  - ионосферная задержка с одной разностью для первой наблюдаемой фазы несущей с одной разностью,
- ионосферная задержка с одной разностью для первой наблюдаемой фазы несущей с одной разностью,  - ионосферная задержка с одной разностью для второй наблюдаемой фазы несущей с одной разностью, где I - функция Полной концентрации электронов; и
- ионосферная задержка с одной разностью для второй наблюдаемой фазы несущей с одной разностью, где I - функция Полной концентрации электронов; и  - шум наблюдения фазы несущей;
- шум наблюдения фазы несущей;  - геометрическое расстояние с одной разностью; и
- геометрическое расстояние с одной разностью; и  - межканальное смещение для измерений фазы несущей с одной разностью (SD), и k представляет частоту L1 или L2 GPS или G1 или G2 GLONASS. В вышеприведенном Уравнении 3 четыре члена тактовых импульсов приемника и межсистемных смещений можно убрать, за исключением межканальных смещений GLONASS (например, смещений тактовых импульсов GLONASS между разными спутниками).
- межканальное смещение для измерений фазы несущей с одной разностью (SD), и k представляет частоту L1 или L2 GPS или G1 или G2 GLONASS. В вышеприведенном Уравнении 3 четыре члена тактовых импульсов приемника и межсистемных смещений можно убрать, за исключением межканальных смещений GLONASS (например, смещений тактовых импульсов GLONASS между разными спутниками).
Члены целочисленной неопределенности также можно перегруппировать следующим образом, чтобы прийти к Уравнению 4:

Для измерений фазы несущей GPS четвертый член ( ) с правой стороны уравнения (4) исчезнет, потому что межканальное смещение фазы одинаково для разных спутников GPS. Для измерений фазы несущей GLONASS третий член называется целочисленной неопределенностью с одной разностью для опорного спутника (или ), и его можно оценить. Если неопределенность с одной разностью опорного спутника GLONASS для фазы несущей оценивается из смещения псевдодальности GLONASS для одного и того же спутника GLONASS, то оставшиеся ошибки (например, основная погрешность спутника или другое межканальное смещение), ассоциированные с третьим членом, могли бы по-прежнему вызывать систематические погрешности модели и могли бы привести к неверному разрешению неопределенности с двойной разностью, а отсюда и ухудшенной точности позиционирования. Следует отметить, что максимальная разница длины волны равна 0,85 мм для частоты G1 GLONASS и 1,10 мм для частоты G2 GLONASS. Невозможно зафиксировать
) с правой стороны уравнения (4) исчезнет, потому что межканальное смещение фазы одинаково для разных спутников GPS. Для измерений фазы несущей GLONASS третий член называется целочисленной неопределенностью с одной разностью для опорного спутника (или ), и его можно оценить. Если неопределенность с одной разностью опорного спутника GLONASS для фазы несущей оценивается из смещения псевдодальности GLONASS для одного и того же спутника GLONASS, то оставшиеся ошибки (например, основная погрешность спутника или другое межканальное смещение), ассоциированные с третьим членом, могли бы по-прежнему вызывать систематические погрешности модели и могли бы привести к неверному разрешению неопределенности с двойной разностью, а отсюда и ухудшенной точности позиционирования. Следует отметить, что максимальная разница длины волны равна 0,85 мм для частоты G1 GLONASS и 1,10 мм для частоты G2 GLONASS. Невозможно зафиксировать  в целом числе, потому что ее показатель очень маленький. По той же причине ошибка в
в целом числе, потому что ее показатель очень маленький. По той же причине ошибка в  будет оказывать небольшое влияние на точность системы. Например, 1 цикл в внесет ошибку менее 1,1 мм в измерение с правой стороны уравнения (4). Член является постоянным, пока не возникнет проскальзывание цикла в приемнике с определением местоположения относительно опорного спутника. Поэтому желательно промоделировать член как один или более членов специфичного для спутника смещения (например, член смещения спутника G1 и член смещения спутника G2 для каждого принятого спутника GLONASS) в фильтре 24 с компенсацией погрешности (например, фильтре Калмана), чтобы разобраться с межканальным смещением при обработке двойной разности.
будет оказывать небольшое влияние на точность системы. Например, 1 цикл в внесет ошибку менее 1,1 мм в измерение с правой стороны уравнения (4). Член является постоянным, пока не возникнет проскальзывание цикла в приемнике с определением местоположения относительно опорного спутника. Поэтому желательно промоделировать член как один или более членов специфичного для спутника смещения (например, член смещения спутника G1 и член смещения спутника G2 для каждого принятого спутника GLONASS) в фильтре 24 с компенсацией погрешности (например, фильтре Калмана), чтобы разобраться с межканальным смещением при обработке двойной разности.
В соответствии с третьей методикой для выполнения этапа S507 процессор 22 данных, механизм 20 RTK или устройство 34 оценки смещения оценивает неопределенность одной разности опорного спутника GLONASS и неопределенность двойной разности GLONASS (или неопределенность одной разности GLONASS) вместе с данными о движении (например, данными о положении и/или данным о скорости), данными об ионосфере, тропосфере и параметрами неопределенности в уравнениях фазы несущей с двойной разностью и наблюдения псевдодальности в Уравнениях (3) или (4), чтобы определить межканальное смещение.
В четвертой методике процессор 22 данных или механизм 20 RTK оценивает два дополнительных состояния неопределенности, которые могут называться специфичными для полосы состояниями неопределенности для опорных спутников GLONASS в полосах G1 и G2. Специфичные для полосы состояния неопределенности применяют все частоты или поддиапазоны в каждой полосе. Специфичные для полосы состояния неопределенности остаются постоянными, пока не возникает проскальзывание цикла в приемнике с определением местоположения (10, 110, 210 или 310) относительно опорного спутника. Желательно промоделировать эти члены смещений опорного спутника в виде постоянной или случайного блуждания в фильтре 24 с компенсацией погрешности (например, фильтре Калмана). Специфичные для полосы состояния неопределенности не фиксируются как целое число, и их показатели обычно небольшие по сравнению с целочисленными решениями для соответствующих неопределенностей фазы несущей.
Для определения специфичных для полосы состояний неопределенности измерениями, которые нужно использовать, являются фаза несущей с двойной разностью в Уравнении (3) или (4) и псевдодальность с двойной разностью. Если нижеследующая таблица межканального смещения GLONASS не существует, то они будут предполагаться равными нулю и калиброваться в реальном масштабе времени.
Состояния фильтра 24 с компенсацией погрешности (например, прогнозирующего фильтра или фильтра Калмана) описываются в следующей таблице:
где
NGPS - количество используемых спутников GPS.
NGLN - количество используемых спутников GLONASS.
Оставшиеся неопределенности одной разности для опорного спутника GLONASS будут иметь меньшее влияние на неопределенность двойной разности и точность позиционирования, когда обрабатываются данные нескольких эпох, и они могли бы рассматриваться в качестве одинакового неизвестного параметра для разных эпох. Некоторое особое внимание необходимо для состояний неопределенности опорного спутника GLONASS в фильтре 24 с компенсацией погрешности (например, фильтре Калмана), особенно для процедуры калибровки межканального смещения кода и фазы GLONASS, которая позже описывается более подробно.
В пятой методике для выполнения этапа S507 альтернативный подход состоит в формировании наблюдаемой с двойной разностью после того, как наблюдаемые с одной разностью выражаются в единицах циклов:
где  относится к
относится к  ,
,  ,
,  и
и  соответственно для сигналов L1 GPS, L2 GPS, G1 GLONASS и G2 GLONASS. Видно, что смещение тактовых импульсов приемника с разностью нельзя исключить в Уравнении (5). Четвертый член (ионосферная задержка) и пятый член (тропосферная задержка) становятся немного больше, чем в случае, когда две частоты являются одинаковыми. Используя измерения псевдодальности GPS и GLONASS, можно оценить разность между двумя смещениями тактовых импульсов приемника. Это могло бы использоваться для корректировки второго члена с целью разрешения неопределенности. Однако это смещение тактовых импульсов приемника может значительно ухудшить точность позиционирования и разрешение неопределенности. Из-за разных частот для разных спутников GLONASS относительное смещение
соответственно для сигналов L1 GPS, L2 GPS, G1 GLONASS и G2 GLONASS. Видно, что смещение тактовых импульсов приемника с разностью нельзя исключить в Уравнении (5). Четвертый член (ионосферная задержка) и пятый член (тропосферная задержка) становятся немного больше, чем в случае, когда две частоты являются одинаковыми. Используя измерения псевдодальности GPS и GLONASS, можно оценить разность между двумя смещениями тактовых импульсов приемника. Это могло бы использоваться для корректировки второго члена с целью разрешения неопределенности. Однако это смещение тактовых импульсов приемника может значительно ухудшить точность позиционирования и разрешение неопределенности. Из-за разных частот для разных спутников GLONASS относительное смещение  тактовых импульсов приемника и межканальные смещения нельзя аннулировать в Уравнении (5) фазы несущей GLONASS с двойной разностью.
тактовых импульсов приемника и межканальные смещения нельзя аннулировать в Уравнении (5) фазы несущей GLONASS с двойной разностью.
В шестой методике для выполнения этапа S507 процессор 22 данных, механизм 20 RTK или устройство оценки смещения (34, 134, 234) оценивает параметр относительных тактовых импульсов (второй член в правой стороне позже описанного Уравнения (5)), который мог бы оцениваться с использованием измерений псевдодальности с одной разностью в наблюдении фазы несущей GLONASS с двойной разностью в Уравнении (5). Следует упомянуть, что два относительных тактовых импульса, оцененные с использованием кодов P1/C1 и P2/C2 GLONASS, должны оцениваться отдельно. Однако с целью разрешения неопределенности и для применений с высокой точностью позиционирования нельзя игнорировать оставшееся смещение тактовых импульсов. Кроме того, этот член нельзя рассматривать в качестве одинакового неизвестного параметра для разных эпох.
Разность частот между сигналами GLONASS будет меньше 7,3125 МГц для наблюдений G1 и 5,6875 МГц для наблюдений G2. Если существует смещение тактовых импульсов в 1 метр, то его самым худшим влиянием на фазу несущей будет 0,0244 цикла для L1 и 0,019 цикла для L2 соответственно. Разность между двумя смещениями тактовых импульсов приемника можно предположить меньше 10 нс (3 метра), поэтому этот член можно было бы скорректировать на уровне 0,06-0,075 цикла. Однако с целью разрешения неопределенности и для применений с высокой точностью позиционирования нельзя игнорировать оставшееся смещение. Кроме того, этот член нельзя рассматривать в качестве одинакового неизвестного параметра для разных эпох.
Если выбирается общий опорный спутник для L1/L2 GPS и G1/G2 GLONASS (например, спутник L1 GPS), то мы можем исследовать влияние на смещение тактовых импульсов приемника. Максимальные разности частот между L1 GPS и G1 GLONASS, L2 GPS и G2 GLONASS равны 30,52 МГц, 347,82 МГц и 326,36 МГц соответственно. Если мы предполагаем, что смещения тактовых импульсов оцениваются в рамках одного метра, то второй член можно было бы скорректировать на уровне 0,1, 1,16 и 1,09 цикла для измерений G1 GLONASS, L2 GPS, G2 GLONASS соответственно. На практике используются измерения с отдельным опорным спутником для L1/L2 GPS и G1/G2 GLONASS, а не общий опорный спутник L1 GPS.
Способ из фиг. 8 аналогичен способу из фиг. 5 за исключением того, что способ из фиг. 8 дополнительно содержит этап S514. Этап S514 может выполняться, например, до, после или одновременно с этапом S510. Одинаковые номера ссылок на фиг. 5 и фиг. 8 указывают одинаковые этапы или процедуры.
На этапе S514 компенсатор 32 смещения обеспечивает постоянную настройку компенсации для соответствующей аппаратной конфигурации приемника с определением местоположения (например, 10, 110, 210 или 310). Приемник с определением местоположения (например, 10, 110, 210 или 310) и опорная станция (40 или 41) могут содержать приемные схемы (например, сверхвысокочастотные фильтры или усилители), которые отличаются или могут не соответствовать равномерной задержке во всей полосе пропускания сигналов L1 и L2 GLONASS. Иногда приемные схемы используют разные задающие генераторы для приемных схем GPS и GLONASS, что можно учитывать для надлежащей обработки. Чтобы минимизировать смещения приемника среди разных исполнений или производителей, приемники с определением местоположения могут включать в себя жестко заданные корректировки смещения, которые определяются в процессе калибровки данного типа приемника с определением местоположения, используя модель или подход с нулевым базовым уровнем. Другим способом, который позволяет уменьшение аппаратных смещений, является правильный выбор аппаратных компонентов. Все упомянутые способы приводят к значительному устранению аппаратных смещений в приемниках GNSS. Также важно оценить смещения, такие как GPS L1-GPS L2, GPS L1-GLN G1 и GPS L1-GLN G2 на этапе предварительного выпуска.
Способ из фиг. 9 аналогичен способу из фиг. 5 за исключением того, что способ из фиг. 9 дополнительно включает в себя этап S516 и этап S518. Одинаковые номера ссылок на фиг. 5 и фиг. 8 указывают одинаковые этапы или процедуры.
На этапе S516 устройство оценки смещения (34, 134 или 234) в контроллере 52 смещения кода оценивает смещение псевдокода между вторичным псевдокодом (например, кодом SP GLONASS), включенным в сигнал третьей несущей или сигнал четвертой несущей, и первичным псевдокодом (например, кодом C/A), закодированном в сигнале первой несущей. Все смещения GLONASS ниже для калибровки реального масштаба времени представляют межканальное смещение с одной разностью для заданной пары приемников, то есть смещения SD, ненулевую разницу или смещения с DD. Все межканальные смещения кода GLONASS соотносятся с GPS. Для любого конкретного спутника GLONASS существуют три разных смещения кода: (1) смещение кода CA (смещение кода CA GLONASS по отношению ко всем кодам CA GPS), (2) смещение кода P1 (смещение кода P1 GLONASS по отношению ко всем кодам P1 GPS) и (3) смещение кода P2 (смещение кода P2 GLONASS по отношению ко всем кодам P2 GPS). Вышеприведенное различие между смещением кода CA и смещением кода P1 очень важно, особенно для полосы L1, где мы при желании можем использовать либо коды CA, либо коды P1.
Так как измерения кода псевдодальности GLONASS обычно не такие точные, как измерения кода псевдослучайного шума в GPS, смещения кода GLONASS могут оцениваться вне фильтра 24 с компенсацией погрешности (например, фильтра Калмана). В частности, устройство оценки смещения (34, 134, 234) оценивает смещение кода вне фильтра 24 с компенсацией погрешности (например, фильтра Калмана), используя остатки после подгонки кода GLONASS с одной разностью.
Каждый приемник с определением местоположения (10, 110, 210 или 310) может хранить в устройстве 28 хранения данных или где-то в другом месте таблицу с информацией о смещении кода (таблицу смещения), включающую одно из следующего: (1) ID базовой станции (если возможно); (2) Тип кода (CA (например, грубое сопровождение GPS), SP (например, стандартный код точного сопровождения GLONASS), G1C (например, код CA GLONASS), C2C (например, код CA GLONASS), P1 (например, компонент точного кода GPS) или P2 (например, компонент точного кода GPS)); (3) Временная привязка (время GPS+номер недели) для каждого спутника GLONASS; (4) Оценка значения смещения (CB) для каждого спутника GLONASS; и (5) Оценка дисперсии ошибки смещения (VAR) для каждого спутника GLONASS. Временная привязка и ID базовой станции полезны для сохранения информации таблицы смещения в устройстве 28 хранения данных (например, энергонезависимом RAM), чтобы использовать ее для следующего сеанса RTK. Отметим, что обычно возможно поддерживать NSITE x BLOCK x NSAT таблиц смещения, где NSITE - количество возможных базовых станций, а BLOCK<=3 - номер измерения, например CA, P1 и P2. NSAT является количеством спутников GLONASS.
На этапе S518 устройство оценки смещения (34, 134 или 234) в контроллере 52 смещения кода сохраняет оцененное смещение псевдокода в устройстве 28 хранения данных (например, энергонезависимом электронном запоминающем устройстве или в оперативном запоминающем устройстве) как часть таблицы смещения, которая доступна по меньшей мере кинематическому механизму 20 реального масштаба времени.
Способ из фиг. 10 аналогичен способу из фиг. 5 за исключением того, что способ из фиг. 10 дополнительно содержит этап S520. Этап S520 может выполняться, например, до, после или одновременно с этапом S510. Одинаковые номера ссылок на фиг. 5 и фиг. 10 указывают одинаковые этапы или процедуры.
На этапе S520 устройство оценки смещения (34, 134 или 234) или контроллер 52 смещения кода создает таблицу соответствий с информацией о смещении кода для каждого вторичного спутника, который отслеживает приемник с определением местоположения, где таблица соответствий содержит оценку значения смещения, соответствующий идентификатор спутника или базовой станции, ассоциированный с оценкой значения смещения, и одно или более из следующего: тип кода (например, C/A, SP, P1 или P2), временная отметка и оценка дисперсии ошибки смещения.
Этап S520 может поддерживать процедуру инициализации смещения и модель Случайного блуждания. Например, при обработке смещения GLONASS устройство оценки смещения (34, 134 или 234) или приемник с определением местоположения могут использовать модель Случайного блуждания, которая не зависит от спутника к спутнику, от блока к блоку и от базы к базе. Эта модель описывается параметром  , который описывает максимальный предполагаемый уход смещения кода (например, по умолчанию может быть установлен приблизительно в 1e-8 или другое подходящее экспоненциальное значение).
, который описывает максимальный предполагаемый уход смещения кода (например, по умолчанию может быть установлен приблизительно в 1e-8 или другое подходящее экспоненциальное значение).
Вообще, обработка смещения GLONASS состоит из 5 операций, которые могут быть обеспечены с помощью способов из фиг. 10-16, в одиночку или в сочетании друг с другом: (1) Инициализация смещения, (2) Обновление времени (применение модели смещение), (3)Компенсация смещения (применение информации о смещении), (4) Калибровка смещения (обновление информации о смещении) и (5) Контроль качества смещения и обновление таблицы смещения.
Фиг. 11 раскрывает блок-схему алгоритма в соответствии с первым примером оценивания положения, ориентации или того и другого у объекта или транспортного средства с компенсацией смещения, чтобы поддерживать объединенное использование спутниковых передач Системы глобального позиционирования (GPS) и спутниковых передач GLONASS (Глобальная навигационная спутниковая система). Способ из фиг. 11 начинается на этапе S500.
На этапе S500 первичная система 14 обработки данных приемника или первичное устройство 18 измерения фазы измеряет фазу первой несущей (например, сигнал L1 GPS) и фазу второй несущей (например, сигнал L2 GPS), принятые приемником с определением местоположения (10, 110, 210 или 310), где несущие принимаются от двух или более первичных спутников (например, спутников GPS).
На этапе S502 вторичная система 16 обработки данных приемника или вторичное устройство 30 измерения фазы измеряет фазу третьей несущей у сигнала третьей несущей (например, сигнала G1(K) или сигнала поддиапазона L1 GLONASS) и фазу четвертой несущей у сигнала четвертой несущей (например, сигнала G2(K) или сигнала поддиапазона L2 GLONASS), принятых приемником с определением местоположения (10, 110, 210 или 310), где третья и четвертая несущие принимаются от вторичных спутников (например, спутников GLONASS) на разных частотах от двух или более вторичных спутников, что приводит к межканальному смещению между сигналами несущей от разных вторичных спутников, наблюдаемых в приемнике с определением местоположения (10, 110, 210 или 310).
На этапе S504 процессор 22 данных или кинематический механизм 20 реального масштаба времени оценивает первый набор целочисленных неопределенностей, ассоциированный с измеренной фазой первой несущей, и второй набор целочисленных неопределенностей, ассоциированный с измеренной фазой второй несущей. Например, в одном варианте осуществления процессор данных или механизм 20 RTK может оценивать первый набор целочисленных неопределенностей и второй набор целочисленных неопределенностей, если качество сигнала у сигналов несущей GPS, принятых в приемнике с определением местоположения (например, 10, 110, 210 или 310), больше порогового уровня качества сигнала (например, определенного в первичном входном каскаде 12 приемника, первичном декодере 48 или первичном устройстве 18 измерения фазы) по меньшей мере для минимального количества спутников в группировке GPS.
На этапе S506 процессор 22 данных или кинематический механизм 20 реального масштаба времени оценивает третий набор целочисленных неопределенностей, ассоциированный с измеренной фазой третьей несущей, и четвертый набор целочисленных неопределенностей, ассоциированный с измеренной фазой четвертой несущей. Например, в одном варианте осуществления процессор данных или механизм 20 RTK может оценивать третий набор целочисленных неопределенностей и четвертый набор целочисленных неопределенностей, если качество сигнала у сигналов несущей GLONASS, принятых в приемнике с определением местоположения (10, 110, 210 или 310), больше порогового уровня качества сигнала (например, определенного во вторичном входном каскаде 13 приемника, вторичном декодере 50 или вторичном устройстве 30 измерения фазы) по меньшей мере для минимального количества спутников в группировке GLONASS.
На этапе S600 устройство оценки смещения (34, 134 или 234) создает начальные данные смещения в соответствии с процедурой инициализации смещения, которая работает в первом режиме или втором режиме, где в первом режиме к сохраненным данным смещения обращаются или извлекают из таблицы соответствий, сохраненной в устройстве 28 хранения данных (например, энергонезависимом электронном запоминающем устройстве), ассоциированном с приемником с определением местоположения (10, 110, 210 или 310), чтобы заполнить кинематический механизм 20 реального масштаба времени, и где во втором режиме сохраненные данные смещения содержат предварительно запрограммированное смещение по умолчанию, ассоциированное с соответствующими аппаратными средствами приемника 600 с определением местоположения.
В другом примере для выполнения этапа S600 информация о смещении инициализирует вместе с запуском RTK. Это может быть либо грубая инициализация, когда отсутствует доступная априорная информация о смещениях, либо обычная инициализация, когда имеется некоторая априорная информация о смещениях, которую можно загрузить из таблицы смещения в NVRAM.
Если априорная информация о смещении доступна, то начальными значениями являются следующие:

где NVRAM_BIAS и NVRAM_VAR являются смещением кода GLONASS и информацией о дисперсии, сохраненными в таблице NVRAM;  и
и  являются смещением кода GLONASS и дисперсией для заданного спутника (svId). Важно убедиться, что ID станции в таблице смещения совпадает с таковым при использовании, если используется информация таблицы смещения. Если ID не доступны или не совпадают, то следует использовать жестко заданное смещение по умолчанию или нулевое смещение вместе с дисперсией по умолчанию в 25 м2. Также отметим, что смещения будут меньше, если приемники относятся к одному типу и производителю. При инициализации по умолчанию не следует выполнять обновление времени для самой первой эпохи.
являются смещением кода GLONASS и дисперсией для заданного спутника (svId). Важно убедиться, что ID станции в таблице смещения совпадает с таковым при использовании, если используется информация таблицы смещения. Если ID не доступны или не совпадают, то следует использовать жестко заданное смещение по умолчанию или нулевое смещение вместе с дисперсией по умолчанию в 25 м2. Также отметим, что смещения будут меньше, если приемники относятся к одному типу и производителю. При инициализации по умолчанию не следует выполнять обновление времени для самой первой эпохи.
На этапе S602 устройство оценки смещения (34, 134 или 234) или компенсатор 32 смещения компенсирует межканальное смещение (например, межканальное смещение кода, межканальное смещение фазы несущей или то и другое между подканалами GLONASS в полосе L1 или полосе L2 GLONASS) путем оценивания коэффициента компенсации на основе вычитания межканального смещения из остатка до подгонки кода с двойной разностью. Как только процесс калибровки межканального смещения кода GLONASS работает в реальном масштабе времени, межканальное смещение в Уравнении (3) можно просто вычесть из соответствующего остатка до подгонки кода с DD, а дисперсию этой разности можно регулировать с помощью  в ковариационной матрице R измерения.
в ковариационной матрице R измерения.
На этапе S510 первичная система 14 обработки данных приемника или устройство 26 оценки определяет положение объекта на основе измеренной фазы первой несущей, измеренной фазы второй несущей, оцененного первого набора целочисленных неопределенностей, оцененного второго набора целочисленных неопределенностей и по меньшей мере одной из измеренной фазы третьей несущей и измеренной фазы четвертой несущей, и по меньшей мере одного из компенсированного третьего набора целочисленных неопределенностей и компенсированного четвертого набора целочисленных неопределенностей.
Способ из фиг. 12 аналогичен способу из фиг. 11 за исключением того, что способ из фиг. 12 дополнительно содержит этап S606. Одинаковые номера ссылок на фиг. 11 и фиг. 12 указывают одинаковые этапы или процедуры. Этап S606 может выполняться до, после или одновременно с этапом S510.
На этапе S606 процессор 22 данных или устройство оценки смещения (34, 134 или 234) назначает временные отметки соответствующим измерениям фазы несущей с одной разностью или измерениям псевдослучайного кода определения дальности, ассоциированным с вторичными спутниками, и ассоциированным дисперсиям.
Способ из фиг. 13 аналогичен способу из фиг. 11 за исключением того, что способ из фиг. 13 дополнительно содержит этап S608. Одинаковые номера ссылок на фиг. 11 и фиг. 13 указывают одинаковые этапы или процедуры. Этап S608 может выполняться до, после или одновременно с этапом S510.
На этапе S608 калибратор 64 или устройство 234 оценки смещения калибрует компенсацию для межканального смещения в соответствии с калибровкой одной разности, чтобы учесть изменения в спутниках, принятых или доступных приемнику с определением местоположения (10, 110, 210 или 310), путем преобразования остатков после подгонки с двойной разностью в остатки с одной разностью.
Обработав все данные эпох, мы можем получить вектор RES остатка после подгонки кода с SD для каждого кодового блока (то есть CA, P1 и P2) с ассоциированной ковариацией R измерения, используемой при обновлении ковариации измерения. Каждый блок CA/P1/P2 обрабатывается независимо и аналогичным образом. Как упоминалось ранее, предложенный алгоритм RTK является подходом на основе DD. Однако может быть желательно использовать калибровку межканального смещения GLONASS с одной разностью, чтобы легче справляться с изменением опорного спутника. Основная идея состоит в преобразовании исходных остатков после подгонки с DD в остатки после подгонки с одной разностью, если используется подход с DD. Сначала мы сохраняем остатки Z до подгонки кода GPS/GLONASS с SD и матрицу H плана, которая вычисляется с использованием прогнозируемых координат приемника с определением местоположения (например, координат рабочего приемника RTK). Тактовые импульсы приемника с SD содержатся внутри остатков до подгонки с SD. После пакетных обновлений RTK (CA/P1/L1/P2/L2) корректировки состояния фильтра 24 с компенсацией погрешности (например, фильтра Калмана) накапливаются в переменных  состояний фильтра, которые можно использовать для вычисления остатков после подгонки с SD GPS_RES для GPS и GLN_RES для GLONASS, как показано в следующих уравнениях:
состояний фильтра, которые можно использовать для вычисления остатков после подгонки с SD GPS_RES для GPS и GLN_RES для GLONASS, как показано в следующих уравнениях:


Член weight_mean(GPS_RES) означает взятие взвешенного (с использованием вектора R) среднего значения из блока GPS по всем остаткам блоков (CA/P1/P2 соответственно) тактовых импульсов приемника GPS с SD. Следует отметить, что  включает в себя три обновления координат и может включать в себя некоторые оставшиеся ионосферные и тропосферные вклады в случаях большого диапазона.
включает в себя три обновления координат и может включать в себя некоторые оставшиеся ионосферные и тропосферные вклады в случаях большого диапазона.
GLN_RES содержит межканальные смещения GLONASS относительно ассоциированной дисперсии R GPS, где R - ковариация, используемая при обновлении кода GLONASS для заданного спутника. Процедура обновления смещения может быть описана в Уравнениях (10-13):

где K - прирост для смещения кода GLONASS.
Способ из фиг. 14 аналогичен способу из фиг. 11 за исключением того, что способ из фиг. 12 дополнительно содержит этап S606. Одинаковые номера ссылок на фиг. 11 и фиг. 14 указывают одинаковые этапы или процедуры. Этап S606 может выполняться до, после или одновременно с этапом S510.
На этапе S606 процессор 22 данных или устройство оценки смещения (34, 134 или 234) назначает временные отметки соответствующим измерениям фазы несущей с одной разностью или измерениям псевдослучайного кода определения дальности, ассоциированным с вторичными спутниками, и ассоциированным дисперсиям. Например, для измерения кода с SD GLONASS в момент T(now) предполагается, что доступна оценка смещения GLONASS с ассоциированной дисперсией , привязанной к моменту T(pre). Обновление времени смещения GLONASS от момента T(pre) до T(now) можно выполнить, если остается без изменений, но его дисперсия прогнозируется следующим образом, как показано в Уравнении (7):

где  задается постоянными значениями. После того, как выполняется обновление дисперсии Уравнения (7), смещение GLONASS
задается постоянными значениями. После того, как выполняется обновление дисперсии Уравнения (7), смещение GLONASS  и дисперсия привязываются к моменту T(now).
и дисперсия привязываются к моменту T(now).
На этапе S612 после обработки всех данных эпох, что подтверждается временными отметками, процессор 22 данных, устройство 234 оценки смещения или калибратор 64 калибруют компенсацию для межканального смещения в соответствии с калибровкой одной разности, чтобы учесть изменения в спутниках, принятых или доступных приемнику с определением местоположения (10, 110, 210 или 310), путем преобразования остатков после подгонки с двойной разностью в остатки с одной разностью.
Способ из фиг. 15 аналогичен способу из фиг. 11 за исключением того, что способ из фиг. 15 дополнительно содержит этап S614, этап S616 и этап S618. Одинаковые номера ссылок на фиг. 11 и фиг. 15 указывают одинаковые этапы или процедуры. Этап S614 может выполняться до, после или одновременно с этапом S510.
На этапе S614 устройство 234 оценки смещения или устройство 68 оценки качества контролирует уровень качества у коэффициента компенсации.
Вся информация о смещении может быть сброшена либо по команде пользователя, либо проверкой качества в программном обеспечении. Например, сброс может быть необходим в таких случаях, как изменение идентификатора базовой станции (ID) или значительного скачка в межканальном смещении кода GLONASS. Информация о смещении для конкретного спутника также могла бы сбрасываться, когда заданный код GLONASS с SD присутствовал во входных данных, но помечен как сомнительный (например, алгоритмом RAIM) и не использовался при обновлении блока.
На этапе S616 устройство 234 оценки смещения или устройство 68 оценки качества определяет, имеется ли значительный (например, существенный) скачок или резкое изменение в величине коэффициента компенсации за период времени выборки. Например, в одной конфигурации значительный скачок или резкое изменение может содержать пятипроцентное или более изменение величины коэффициента компенсации за один или более периодов выборки. Если имеется значительный скачок или резкое изменение величины коэффициента компенсации за период времени выборки, то способ продолжается с этапа S618. Однако если нет значительного скачка или существенного резкого изменения величины коэффициента компенсации, то способ возвращается к этапу S614, где уровень качества у коэффициента компенсации контролируется для следующего периода выборки.
Способ из фиг. 16 аналогичен способу из фиг. 11 за исключением того, что способ из фиг. 16 дополнительно содержит этап S614, этап S616 и этап S619. Одинаковые номера ссылок на фиг. 11 и фиг. 16 указывают одинаковые этапы или процедуры. Этап S619 может выполняться до, после или одновременно с этапом S510.
На этапе S619 калибратор 64 или устройство 234 оценки смещения калибрует оцененное межканальное смещение или компенсацию межканального смещения, ассоциированного с фазами несущей вторичных спутников, в соответствии с калибровкой одной разности, чтобы учесть изменения в спутниках, принятых или доступных приемнику с определением местоположения (10, 110, 210 или 310), путем определения остатков в соответствии с Уравнением 18 или эквивалентным либо аналогичным вычислением, которое использует по существу большинство таких же переменных или переменных с коррелированными с ними значениями.
В отличие от оценки межканального смещения кода, тактовые импульсы приемника GLONASS с одной разностью нужно определить точно, чтобы оценить межканальные смещения фазы несущей GLONASS. Оценка смещения тактовых импульсов приемника GLONASS должна быть достаточно точной или рассматриваемой, в противном случае, как источник возможной ошибки. Здесь предлагается новаторский подход к оценке межканального смещения фазы несущей. Измерения фазы несущей с одной разностью в GPS и GLONASS между двумя приемниками можно записать следующим образом:
В этих трех уравнениях и где-то в другом месте в этом документе, где
 - измерения фазы несущей GPS с одной разностью, L1 либо L2;
- измерения фазы несущей GPS с одной разностью, L1 либо L2;
 - теоретический диапазон одной разности (это может вычисляться на основе оцененных местоположений приемника);
- теоретический диапазон одной разности (это может вычисляться на основе оцененных местоположений приемника);
 - тактовые импульсы приемника GPS с одной разностью;
- тактовые импульсы приемника GPS с одной разностью;
 - ионосферное влияние с одной разностью;
- ионосферное влияние с одной разностью;
 - тропосферное влияние с одной разностью;
- тропосферное влияние с одной разностью;
 - шум при измерении фазы несущей;
- шум при измерении фазы несущей;
 - измерения фазы несущей GLONASS с одной разностью, G1 либо G2;
- измерения фазы несущей GLONASS с одной разностью, G1 либо G2;
 - тактовые импульсы приемника GLONASS с одной разностью;
- тактовые импульсы приемника GLONASS с одной разностью;
 - межканальное смещение фазы несущей с одной разностью для GLONASS;
- межканальное смещение фазы несущей с одной разностью для GLONASS;
 - межсистемное смещение между GPS и GLONASS;
- межсистемное смещение между GPS и GLONASS;
Вычитая (14) из (13), мы получаем следующее:
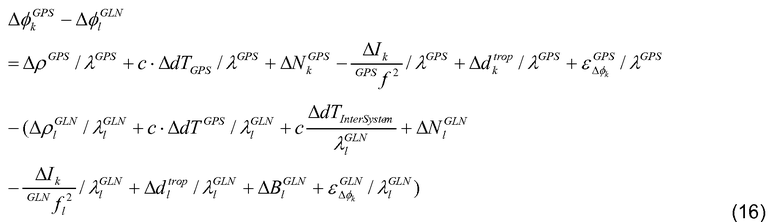
Вышеприведенное уравнение можно преобразовывать следующим образом:

Так как длина волны GPS очень близка к длине волны GLONASS на одной и той же частоте, в вышеприведенном уравнении влияние вклада смещения тактовых импульсов приемника в межканальное смещение значительно смягчается. Системное смещение можно определить точно путем фильтрации измерений кода с одной разностью. Остаточные ионосферные и тропосферные влияния предполагаются незначительными после применения эмпирических моделей и оценок остатка в фильтре с компенсацией погрешности (например, фильтре Калмана). Неопределенность фазы несущей GPS с одной разностью и неопределенность фазы несущей GLONASS можно без труда убрать путем округления целой части в Уравнении (17). Межканальное смещение фазы несущей GLONASS может определяться с использованием следующего уравнения:

Шум при измерении фазы несущей может смягчаться путем фильтрации вычисленного смещения фазы. Калибровка в реальном масштабе времени для смещений фазы несущей GLONASS очень похожа на процедуру для смещений кода GLONASS. Фильтр нижних частот используется для оценки смещения фазы несущей в реальном масштабе времени. Аналогично обработке смещения кода GLONASS, обработка смещения фазы несущей состоит из 5 операций, как и в случае обработки смещения кода. Главное отличие состоит в калибровке смещения. В этом процессе используется Уравнение 18 для вычисления остатков.
На этапе S620 фильтр 70 (например, фильтр нижних частот) фильтрует оцененное межканальное смещение, ассоциированное с фазами несущей, чтобы поддерживать оценку смещения фазы несущей в реальном масштабе времени.
Сантиметровая точность кинематического позиционирования GPS теоретически может достигаться в реальном масштабе времени благодаря миллиметровому разрешению фазы несущей, наблюдаемой с восстановленными неизвестными неопределенностями. Однако на практике надежное и правильное разрешение неопределенности зависит от наблюдений большого количества спутников, что ограничивает его применение, затрудняя применение приложений позиционирования в областях, где количество видимых спутников ограничивается. Способ и система для оценивания положения с компенсацией смещения хорошо подходит для увеличения количества доступных спутников путем упрощения объединенных наблюдений из группировок спутников GPS и GLONASS.
Способ и система для оценивания положения с компенсацией смещения подходит для применений RTK GPS и GLONASS реального масштаба времени. Вышеупомянутый способ включает в себя алгоритм RTK GLONASS и многоэтапную процедуру калибровки межканального смещения для наблюдений кода и фазы несущей GLONASS.
Описав предпочтительный вариант осуществления, становится очевидным, что можно произвести различные модификации без отклонения от объема изобретения, который задан в прилагаемой формуле изобретения.
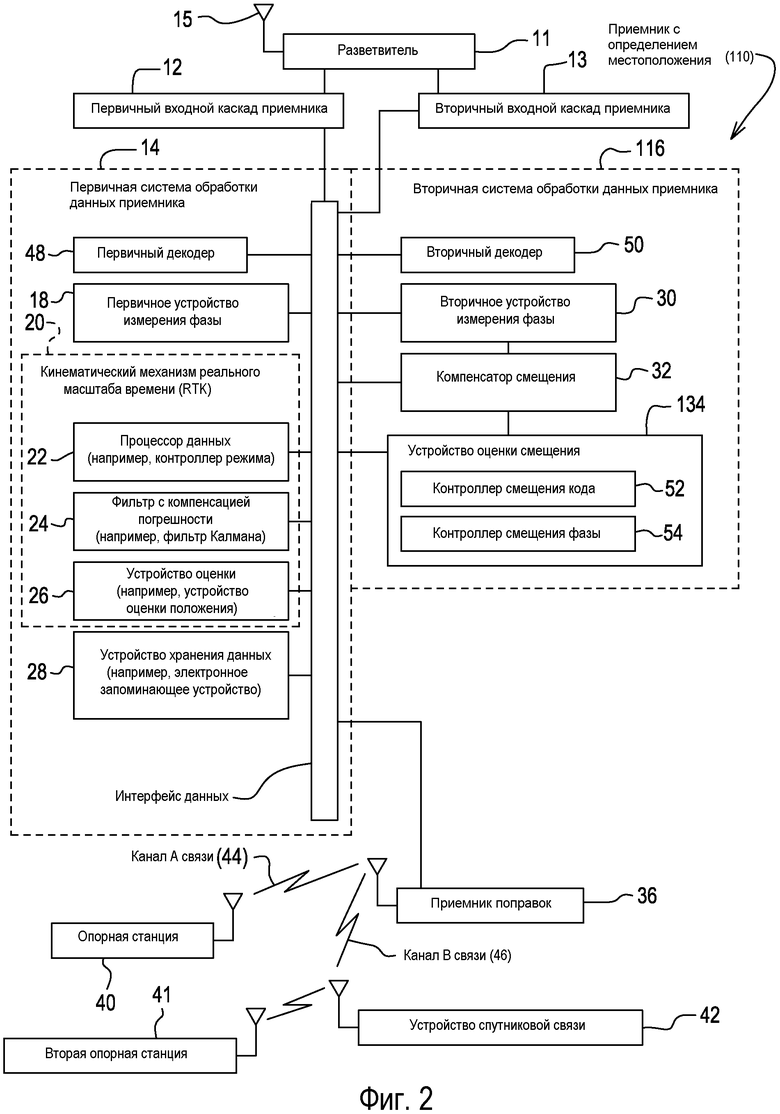
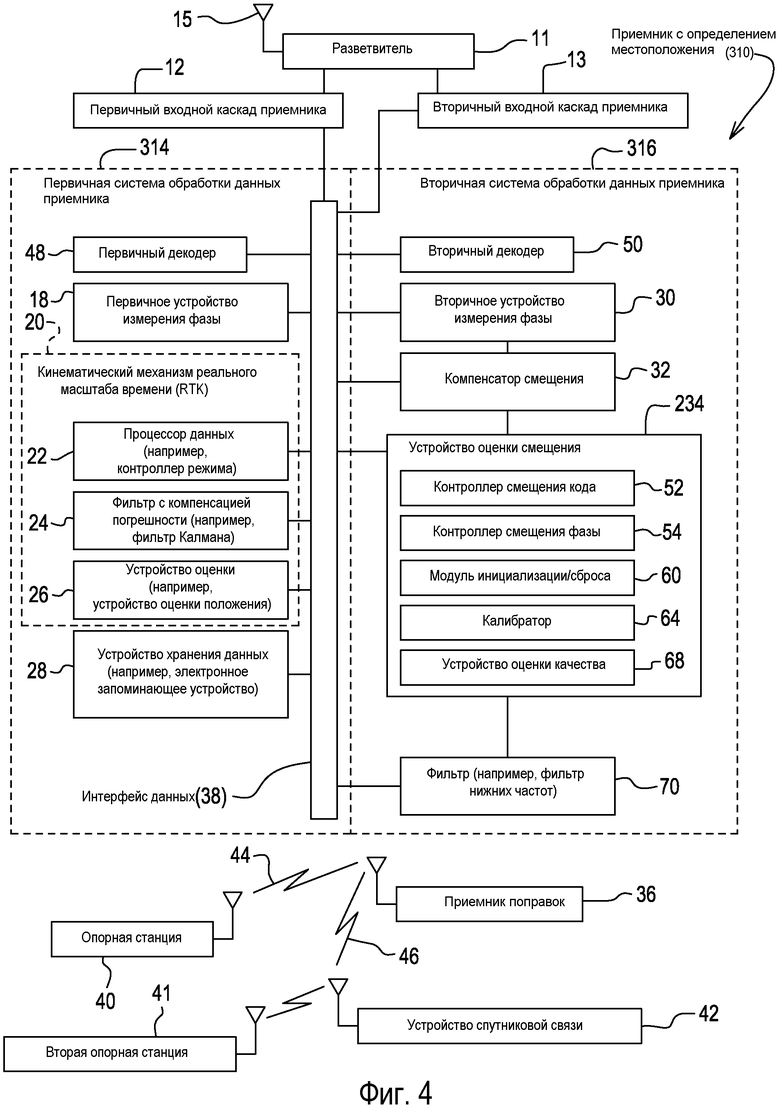
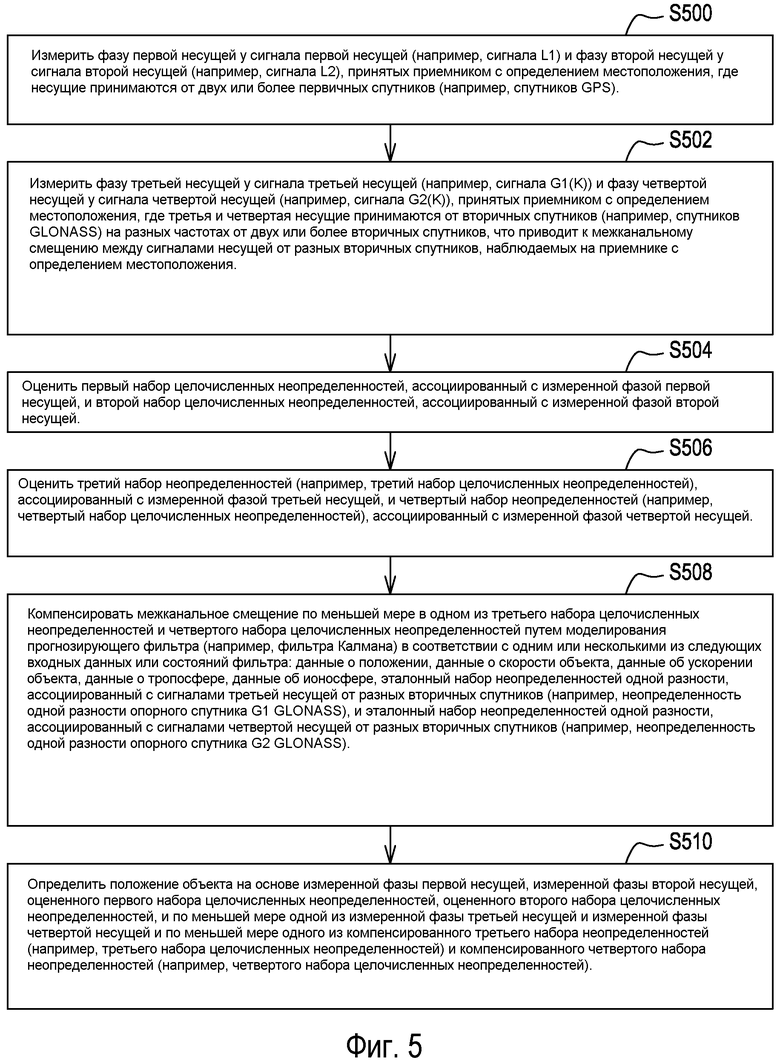
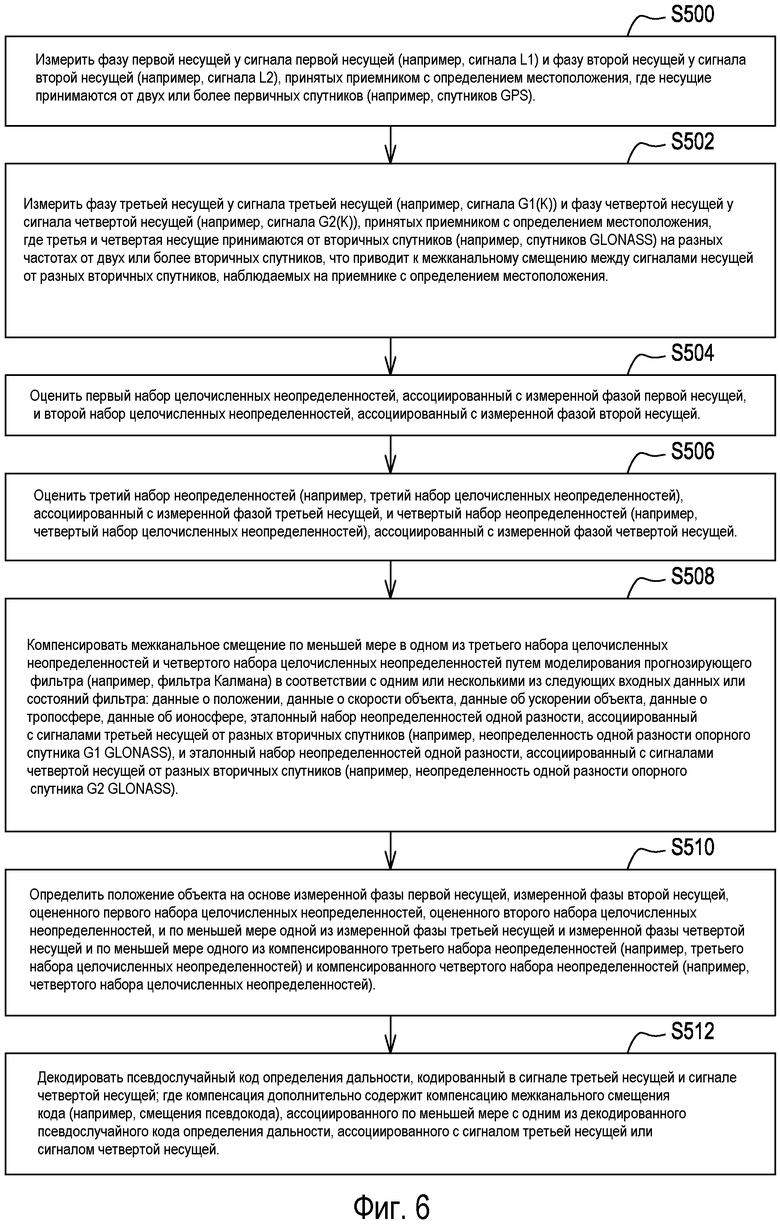
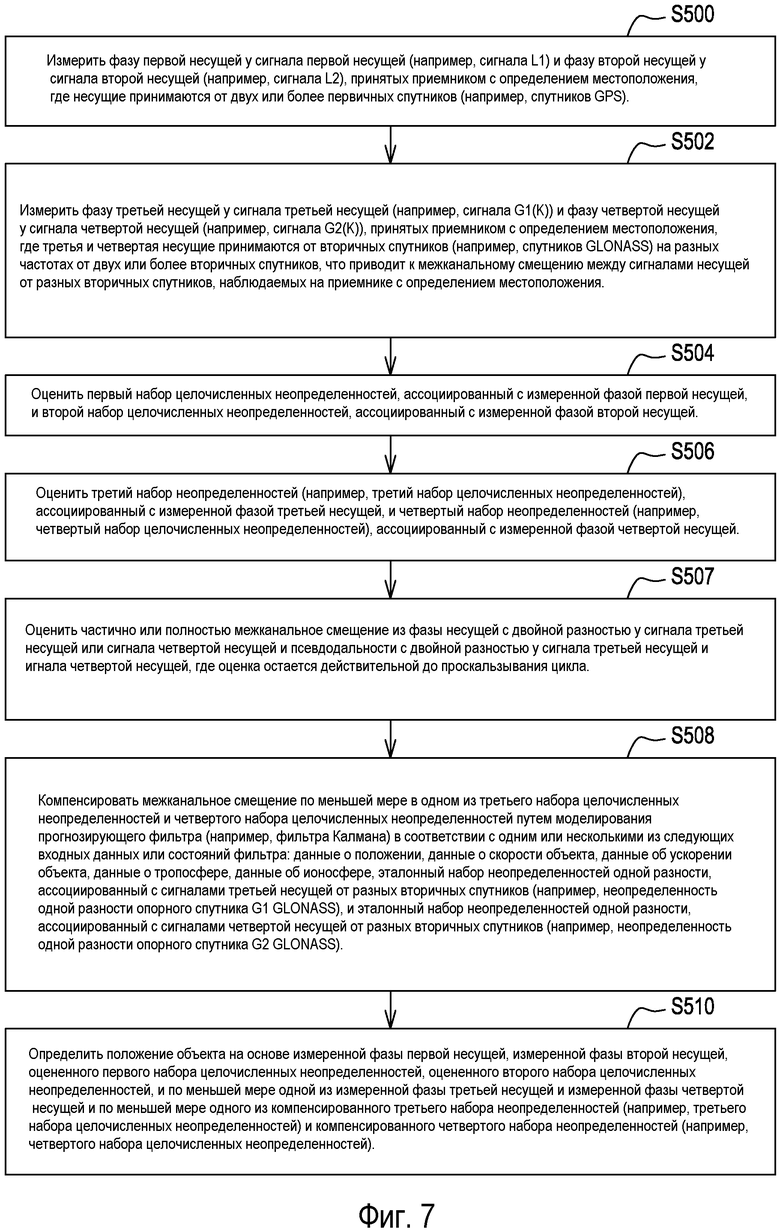
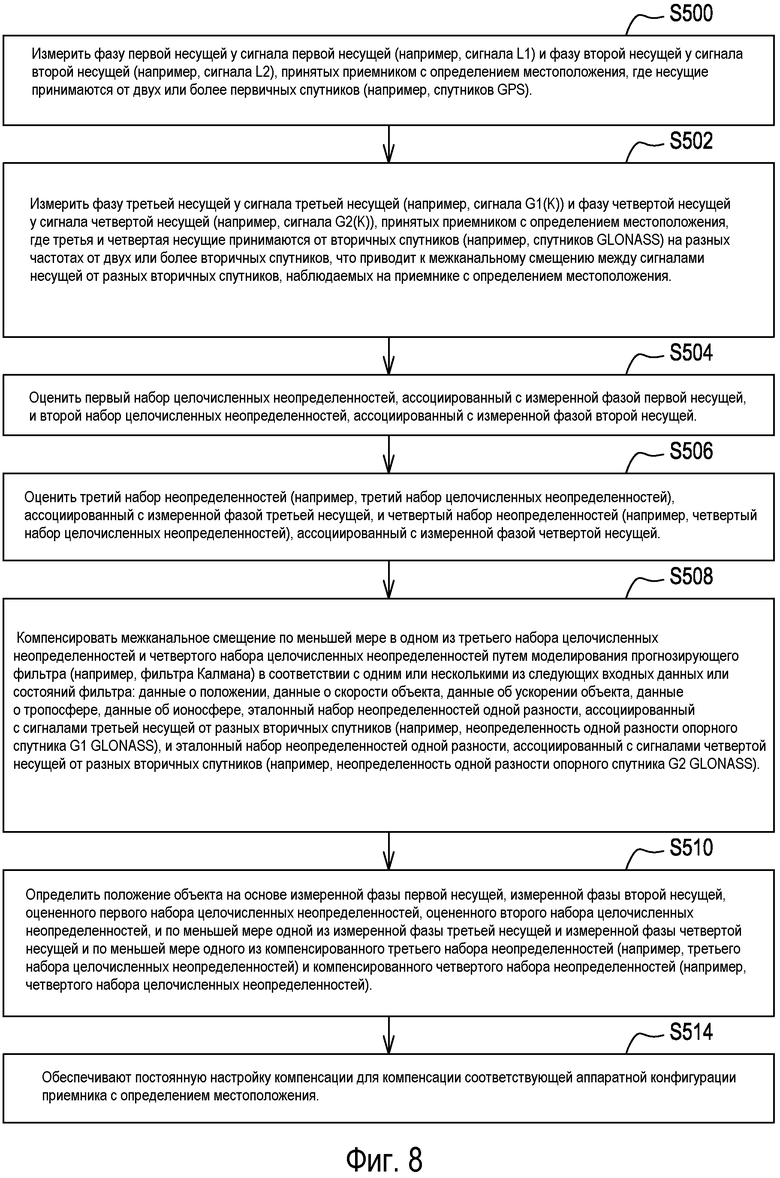
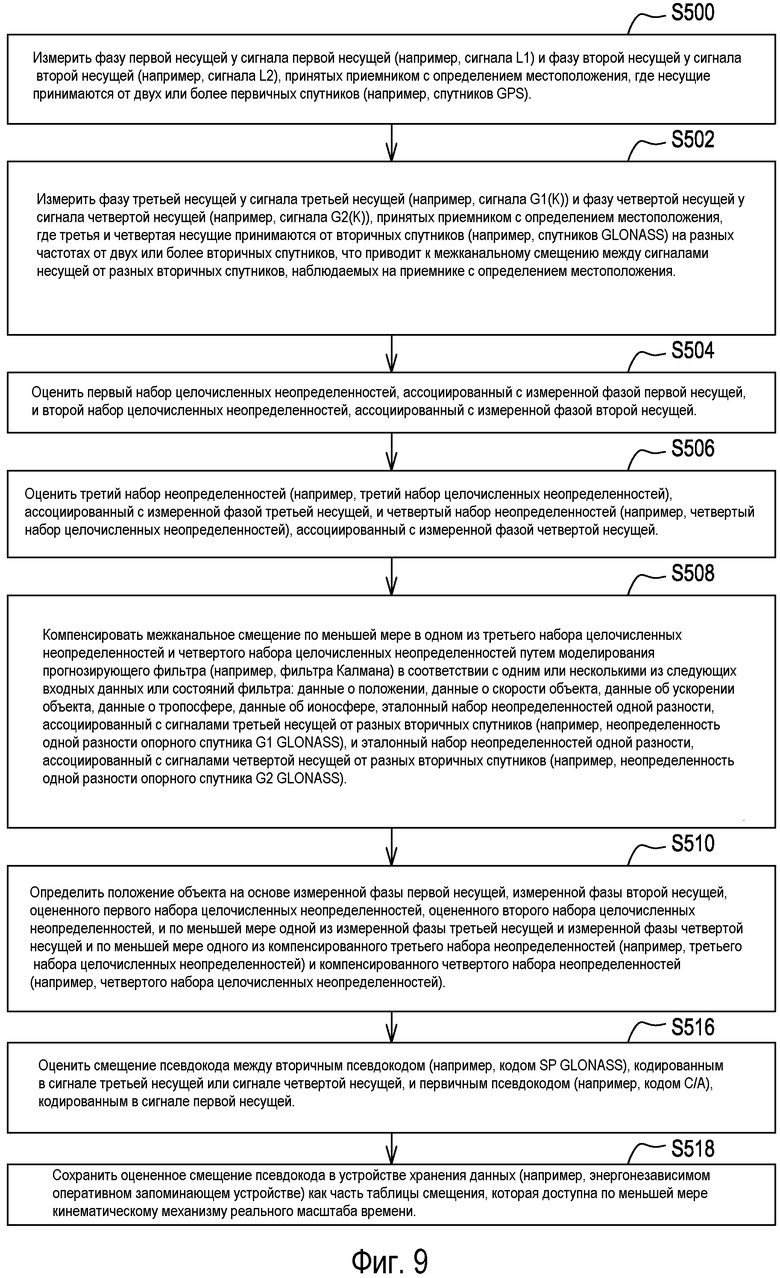
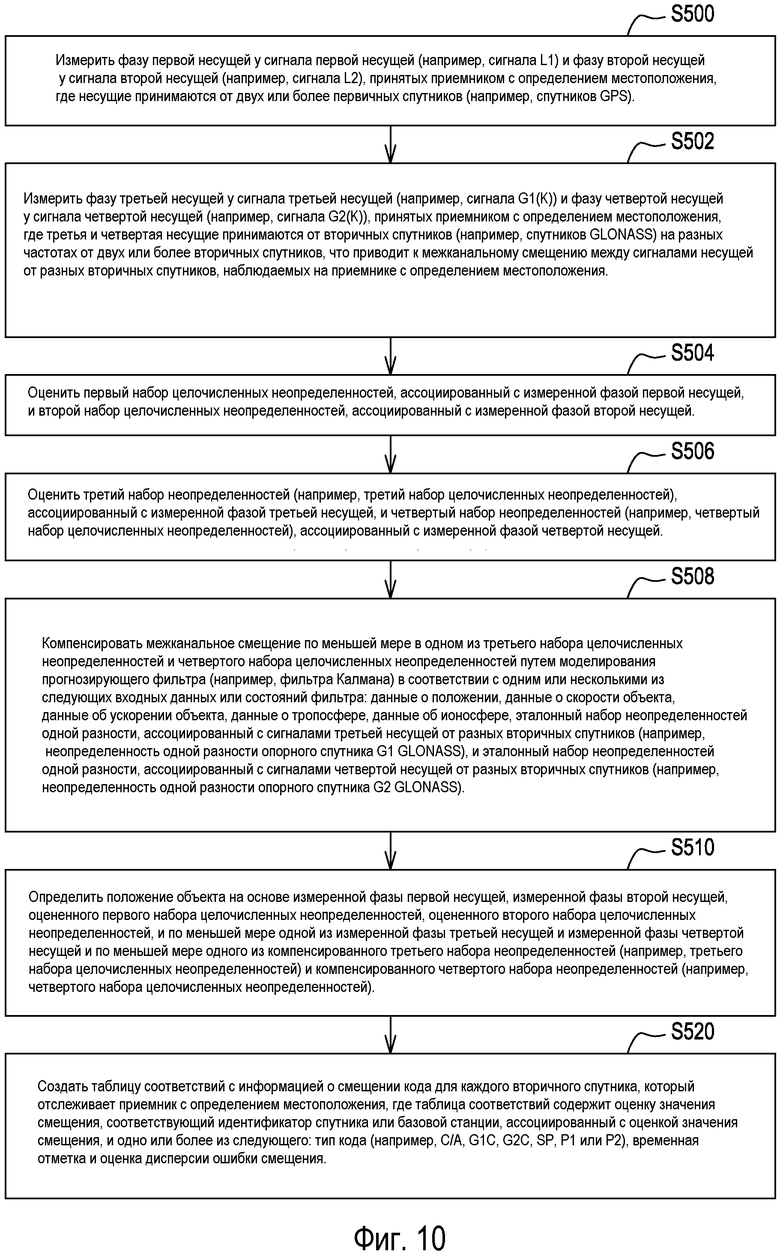
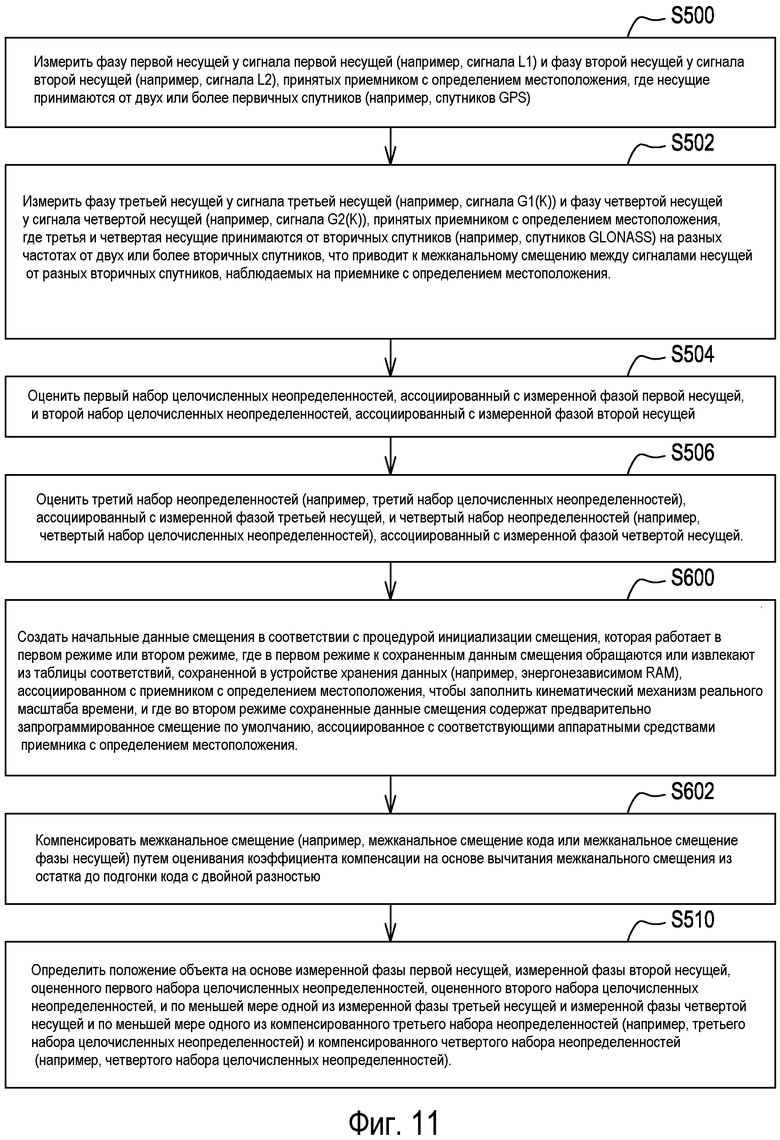
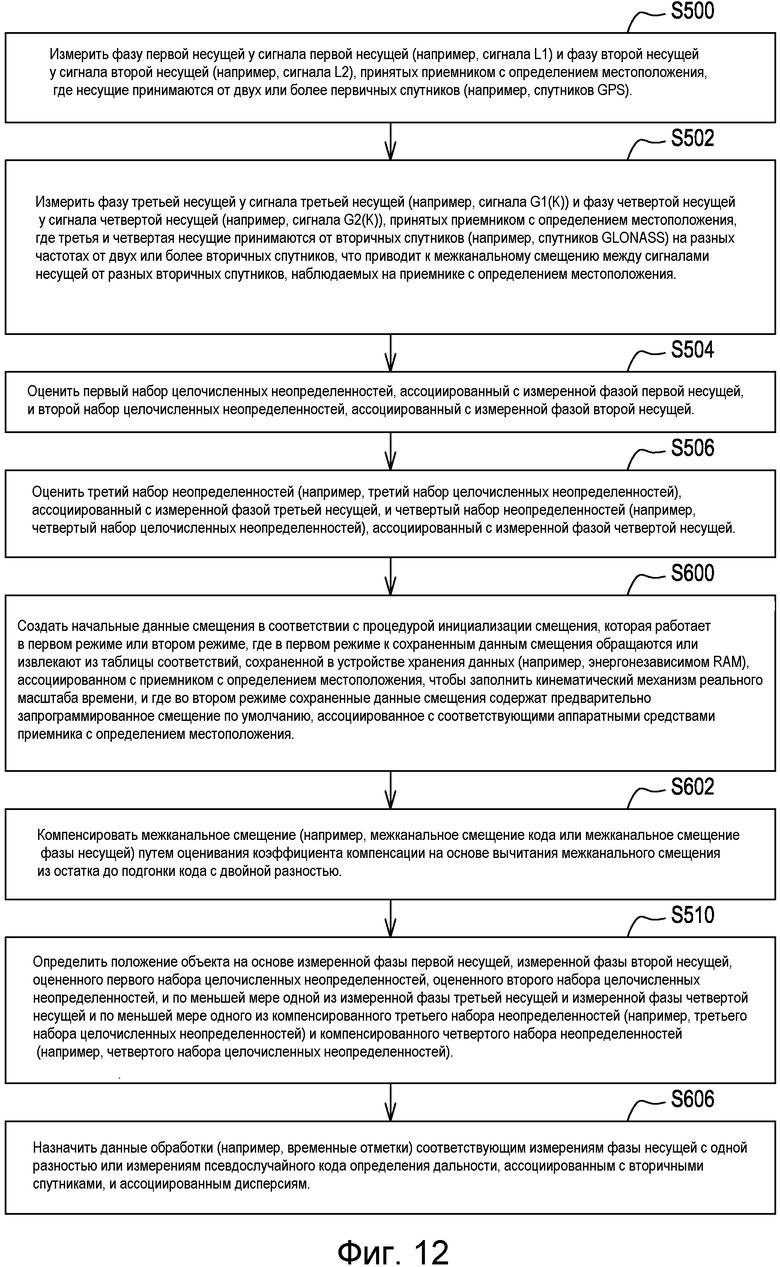
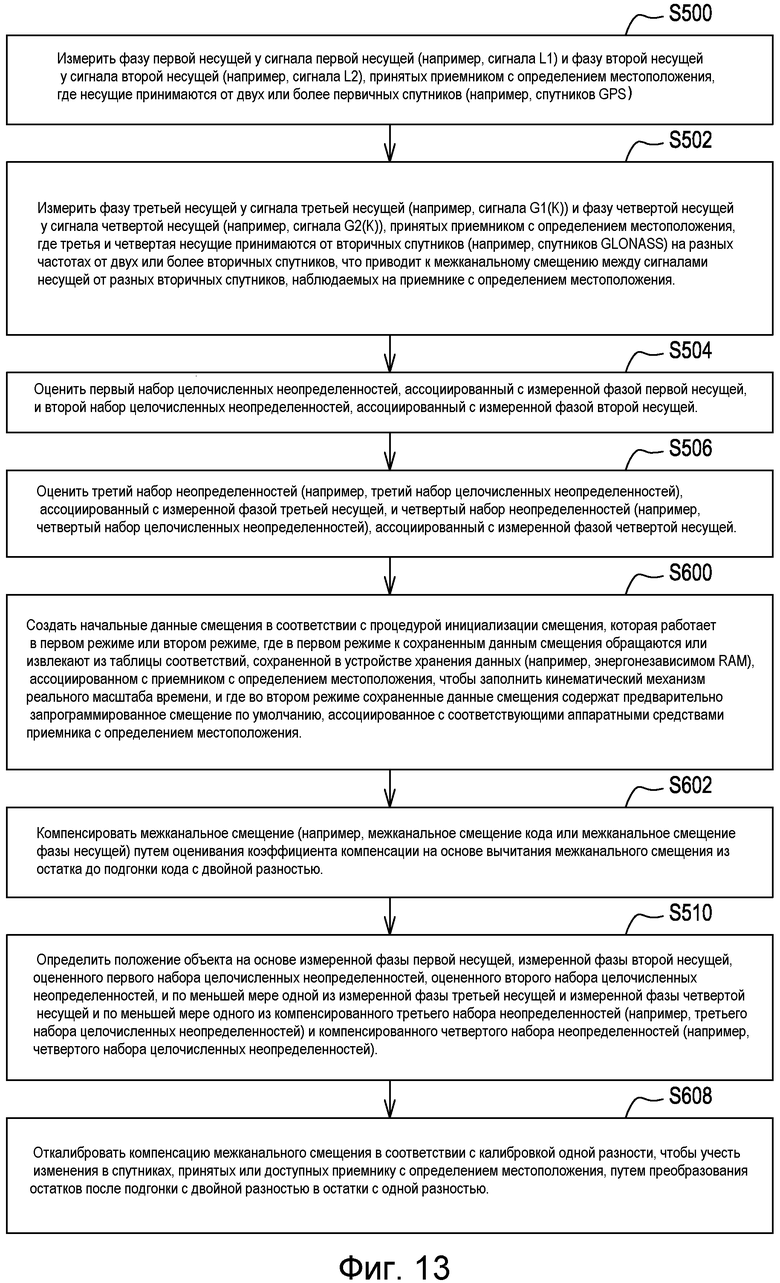
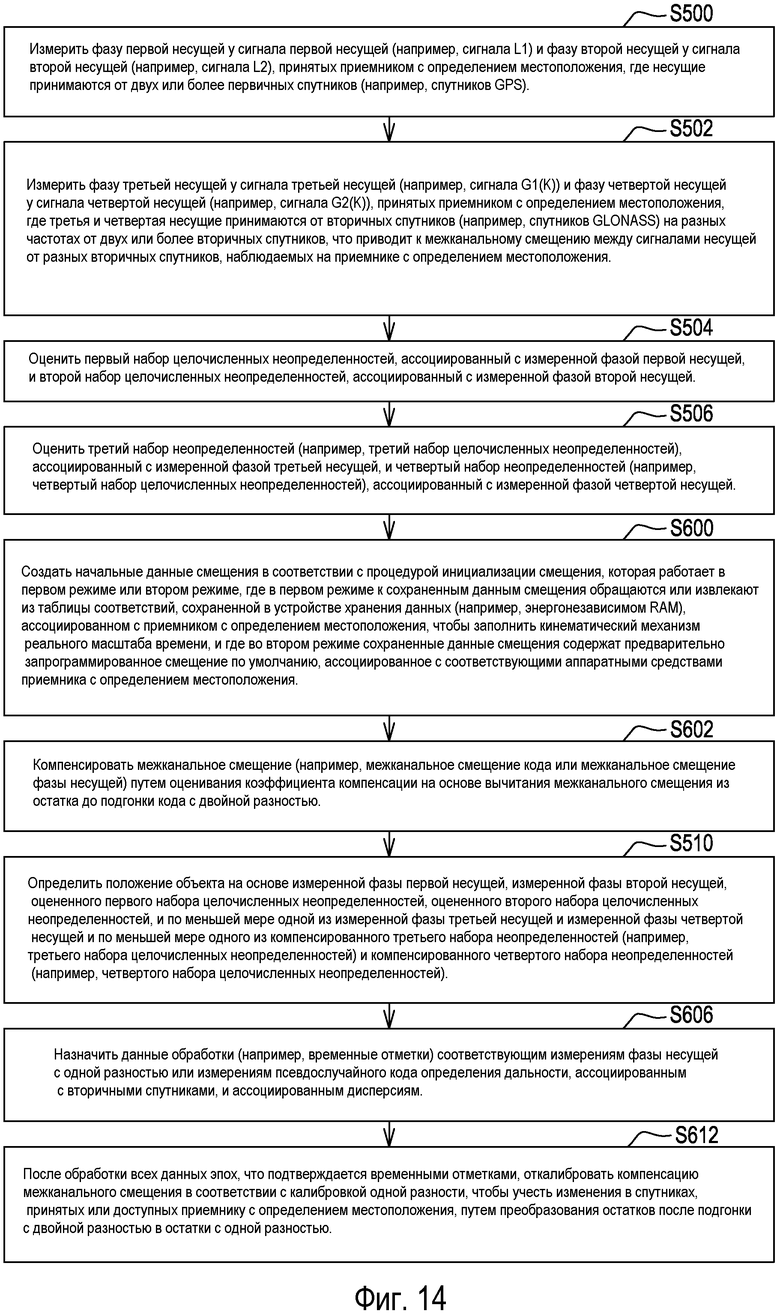
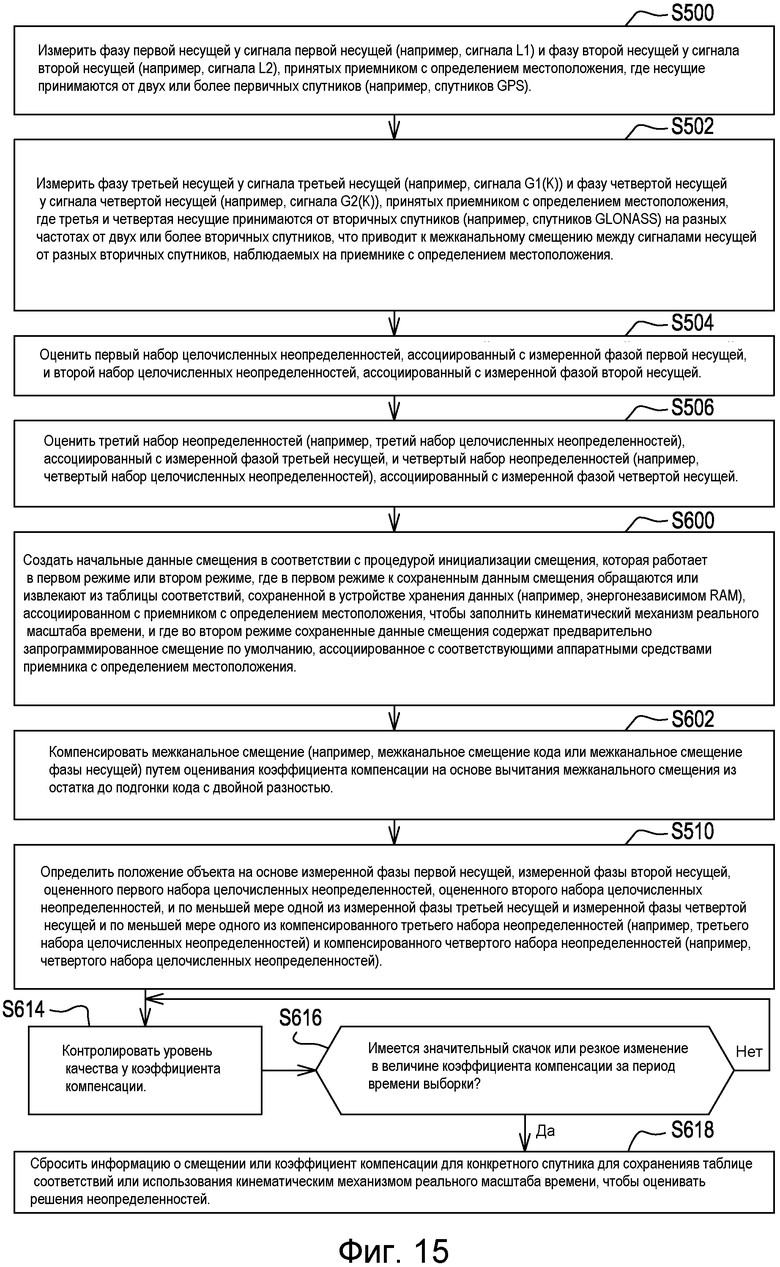
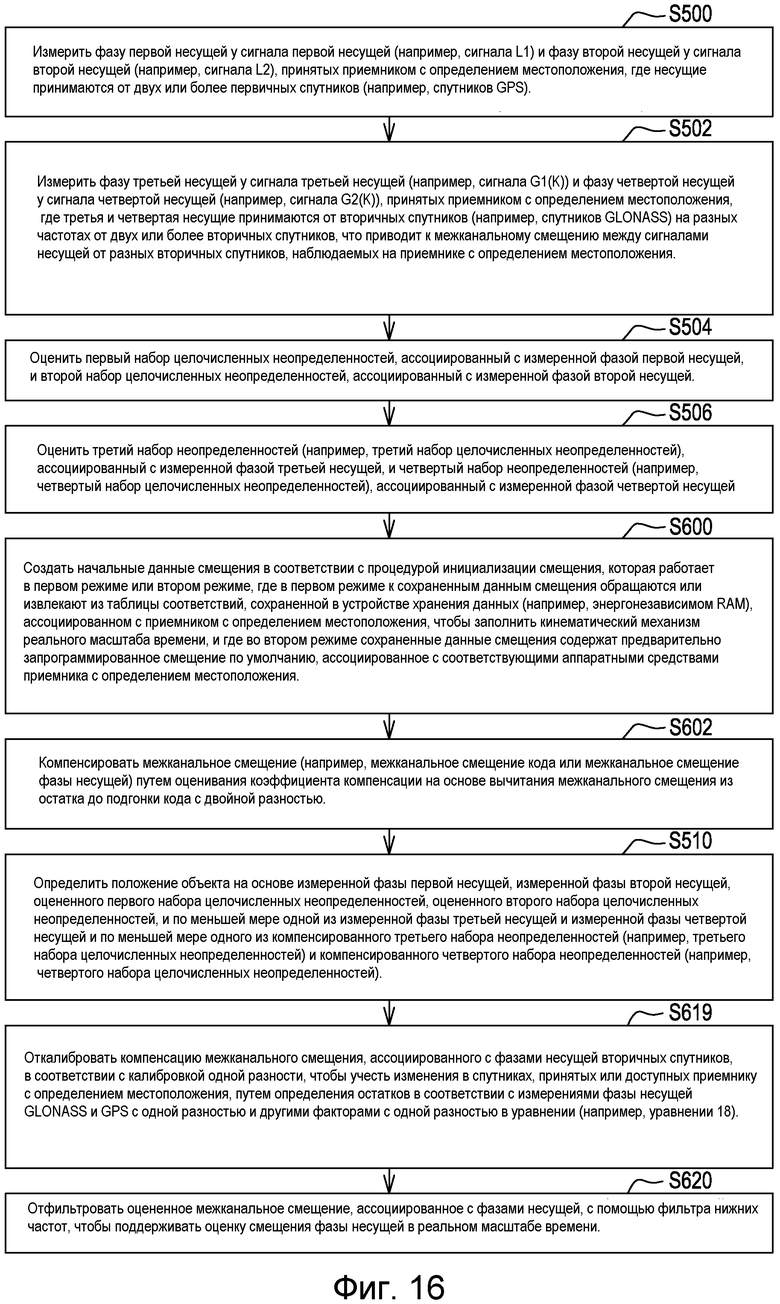
Изобретение относится к радиотехнике и может использоваться для определения местоположения объектов. Технический результат состоит в повышении точности определения местоположения. Для этого первичное устройство (18) измерения фазы измеряет фазу первой несущей и фазу второй несущей у сигналов несущей, принятых приемником (10) с определением местоположения. Вторичное устройство (30) измерения фазы измеряет фазу третьей несущей и фазу четвертой несущей у других сигналов несущей. Кинематический механизм (20) реального времени оценивает первый набор целочисленных неопределенностей, ассоциированный с измеренной фазой первой несущей, и второй набор целочисленных неопределенностей, ассоциированный с измеренной фазой второй несущей. Кинематический механизм (20) реального времени оценивает третий набор неопределенностей, ассоциированный с измеренной фазой третьей несущей, и четвертый набор неопределенностей, ассоциированный с измеренной фазой четвертой несущей. Компенсатор (32) допускает компенсацию межканального смещения по меньшей мере в одном из третьего набора неопределенностей и четвертого набора неопределенностей путем моделирования прогнозирующего фильтра (например, 24) в соответствии с различными входными данными или состояниями фильтра, оцененными устройством (26) оценки. 2 н. и 21 з.п. ф-лы, 16 ил., 1 табл. 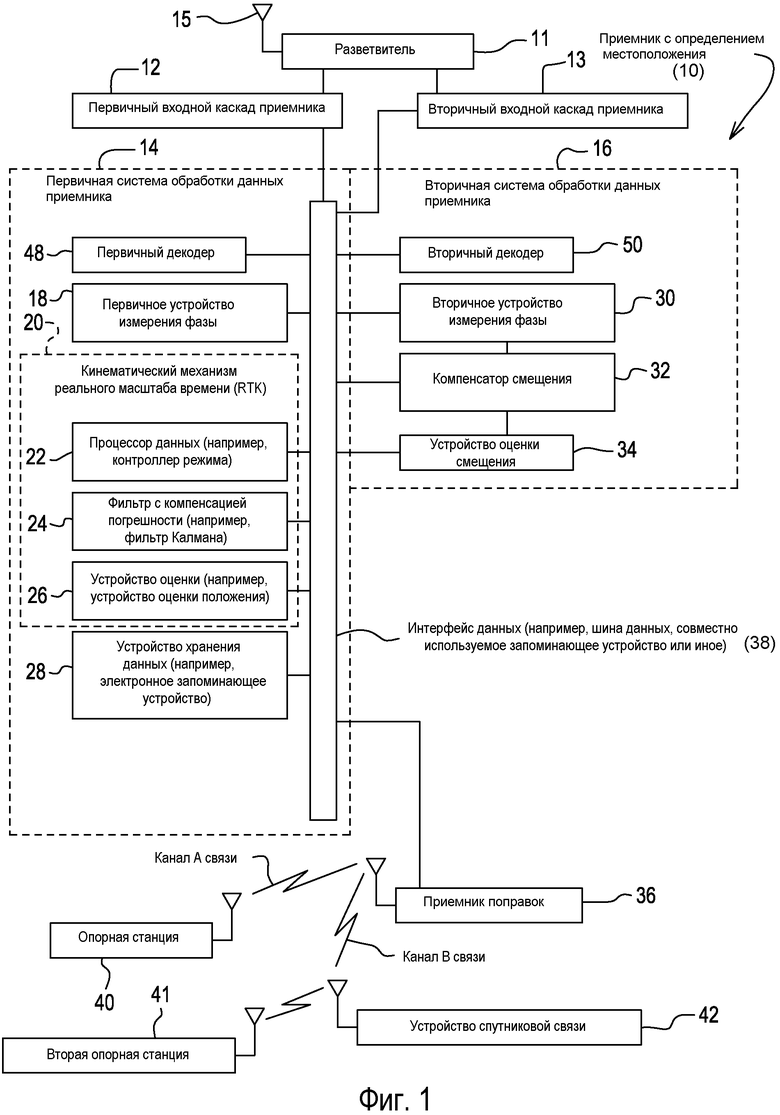
1. Способ оценивания положения объекта с помощью приемника с определением местоположения, ассоциированного с объектом, причем способ содержит этапы, на которых:
измеряют фазу каждой первой несущей у сигнала первой несущей и фазу каждой второй несущей у сигнала второй несущей, принятых приемником с определением местоположения, причем сигнал каждой первой несущей принимают по существу на одной и той же частоте от двух или более первичных спутников, причем сигнал каждой второй несущей принимают по существу на одной и той же частоте от двух или более первичных спутников;
измеряют фазу каждой третьей несущей у сигнала третьей несущей и фазу каждой четвертой несущей у сигнала четвертой несущей, принятых приемником с определением местоположения, причем сигнал каждой третьей несущей передают на разных частотах от двух или более вторичных спутников, причем сигнал каждой четвертой несущей передают на разных частотах от двух или более вторичных спутников, что приводит к межканальному смещению между сигналами несущей от разных вторичных спутников, наблюдаемых на приемнике с определением местоположения;
оценивают первый набор целочисленных неопределенностей, ассоциированный с каждой измеренной фазой первой несущей, и второй набор целочисленных неопределенностей, ассоциированный с каждой измеренной фазой второй несущей;
оценивают третий набор неопределенностей, ассоциированный с каждой измеренной фазой третьей несущей, и четвертый набор неопределенностей, ассоциированный с каждой измеренной фазой четвертой несущей путем вычисления набора неопределенностей двойной разности, ассоциированного с сигналами третьей несущей от разных вторичных спутников, и вычисления другого набора неопределенностей двойной разности, ассоциированного с сигналами четвертой несущей от разных вторичных спутников;
компенсируют межканальное смещение по меньшей мере в одном из третьего набора неопределенностей и четвертого набора неопределенностей путем моделирования прогнозирующего фильтра в соответствии со следующими входными данными или состояниями прогнозирующего фильтра, которые содержат набор неопределенностей одной разности, ассоциированный с сигналами третьей несущей от разных вторичных спутников, и набор неопределенностей, ассоциированный с сигналами четвертой несущей, причем коэффициент компенсации для межканального смещения в наборах неопределенностей двойной разности оценивают для вычитания данных предварительно запрограммированного или начального межканального смещения из остатка до подгонки кода с двойной разностью; и
определяют положение объекта на основе измеренной фазы первой несущей, измеренной фазы второй несущей, оцененного первого набора целочисленных неопределенностей, оцененного второго набора целочисленных неопределенностей и по меньшей мере одной из измеренной фазы третьей несущей и измеренной фазы четвертой несущей, и по меньшей мере одного из компенсированного третьего набора неопределенностей и компенсированного четвертого набора неопределенностей.
2. Способ по п. 1, в котором этап, на котором компенсируют, дополнительно содержит этап, на котором компенсируют в реальном времени межканальное смещение, ассоциированное по меньшей мере с одним из измерений фазы третьей несущей у сигналов третьей несущей от вторичных спутников и измерений фазы четвертой несущей у сигналов четвертой несущей от вторичных спутников.
3. Способ по п. 1, дополнительно содержащий этап, на котором:
декодируют псевдослучайный код определения дальности, кодированный в сигнале третьей несущей и сигнале четвертой несущей; где этап, на котором компенсируют, дополнительно содержит этап, на котором компенсируют межканальное смещение кода, ассоциированное по меньшей мере с одним из декодированного псевдослучайного кода определения дальности, ассоциированного с сигналом третьей несущей или сигналом четвертой несущей.
4. Способ по п. 1, в котором этап, на котором оценивают третий набор неопределенностей и четвертый набор неопределенностей, содержит этап, на котором оценивают третий набор целочисленных неопределенностей и четвертый набор целочисленных неопределенностей путем вычисления эталонного набора неопределенностей одной разности, ассоциированного с парой сигналов третьей несущей от разных вторичных спутников, и вычисления эталонного набора неопределенностей одной разности, ассоциированного с парой сигналов четвертой несущей от разных вторичных спутников.
5. Способ по п. 1, в котором этап, на котором оценивают первый набор целочисленных неопределенностей и второй набор целочисленных неопределенностей, содержит этапы, на которых вычисляют эталонный набор неопределенностей двойной разности, ассоциированный с парой сигналов первой несущей от разных первичных спутников, и вычисляют другой эталонный набор неопределенностей двойной разности, ассоциированный с парой сигналов второй несущей от разных вторичных спутников.
6. Способ по п. 1, в котором этап, на котором оценивают третий набор неопределенностей и четвертый набор неопределенностей, содержит этапы, на которых вычисляют другой набор неопределенностей двойной разности, ассоциированный с сигналами третьей несущей от разных вторичных спутников, и вычисляют набор неопределенностей двойной разности, ассоциированный с сигналами четвертой несущей от разных вторичных спутников.
7. Способ по п. 1, в котором этап, на котором компенсируют, дополнительно содержит этап, на котором оценивают межканальное смещение из фазы несущей с двойной разностью у сигнала третьей несущей или сигнала четвертой несущей и псевдодальности с двойной разностью у сигнала третьей несущей и сигнала четвертой несущей, где оцененное межканальное смещение остается действительным до проскальзывания цикла.
8. Способ по п. 1, в котором этап, на котором компенсируют, дополнительно содержит этап, на котором обеспечивают постоянную настройку компенсации для компенсации соответствующей аппаратной конфигурации приемника с определением местоположения.
9. Способ по п. 1, дополнительно содержащий этапы, на которых:
оценивают смещение псевдокода между вторичным псевдокодом, кодированным в сигнале третьей несущей, и первичным псевдокодом, кодированным в сигнале первой несущей; и
сохраняют оцененное смещение псевдокода в устройстве хранения данных как часть таблицы смещения, которая доступна по меньшей мере кинематическому механизму реального масштаба времени.
10. Способ по п. 1, дополнительно содержащий этапы, на которых
оценивают первое смещение точного кода между вторичным псевдокодом, кодированным в сигнале третьей несущей, и первым точным кодом, кодированным в сигнале первой несущей; и
сохраняют оцененное первое смещение точного кода в электронном запоминающем устройстве как часть таблицы смещения.
11. Способ по п. 1, дополнительно содержащий этапы, на которых:
оценивают второе смещение псевдокода между вторичным псевдокодом, кодированным в сигнале четвертой несущей, и вторым точным кодом, кодированным в сигнале первой несущей; и
сохраняют оцененное первое смещение точного кода в устройстве хранения данных как часть таблицы смещения, которая доступна по меньшей мере кинематическому механизму реального масштаба времени.
12. Способ по п. 1, дополнительно содержащий этапы, на которых
оценивают второе смещение точного кода между вторичным псевдокодом, кодированным в сигнале четвертой несущей, и вторым точным кодом, кодированным в сигнале первой несущей; и сохраняют оцененное первое смещение точного кода в электронном запоминающем устройстве как часть таблицы смещения.
13. Способ по п. 1, дополнительно содержащий этапы, на которых:
создают таблицу соответствий с информацией о смещении кода для каждого вторичного спутника, который отслеживает приемник с определением местоположения, при этом таблица соответствий содержит оценку значения смещения, соответствующий идентификатор спутника или базовой станции, ассоциированный с оценкой значения смещения, и одно или более из следующего: тип кода, временная отметка и оценка дисперсии ошибки смещения.
14. Способ оценивания положения объекта с помощью приемника с определением местоположения, ассоциированного с объектом, причем способ содержит этапы, на которых:
измеряют фазу первой несущей у сигнала первой несущей и фазу второй несущей у сигнала второй несущей, принятых приемником с определением местоположения, причем сигнал первой несущей принимается по существу на одной и той же частоте от двух или более первичных спутников, причем сигнал второй несущей принимается по существу на одной и той же частоте от двух или более первичных спутников;
измеряют фазу третьей несущей у сигнала третьей несущей и фазу четвертой несущей у сигнала четвертой несущей, принятых приемником с определением местоположения, причем сигнал третьей несущей передается на разных частотах от двух или более вторичных спутников, причем сигнал четвертой несущей принимается на разных частотах от двух или более вторичных спутников, что приводит к межканальному смещению между сигналами несущей от разных вторичных спутников, наблюдаемых на приемнике с определением местоположения;
оценивают первый набор целочисленных неопределенностей, ассоциированный с измеренной фазой первой несущей, и второй набор целочисленных неопределенностей, ассоциированный с измеренной фазой второй несущей;
оценивают третий набор целочисленных неопределенностей, ассоциированный с измеренной фазой третьей несущей, и четвертый набор целочисленных неопределенностей, ассоциированный с измеренной фазой четвертой несущей;
создают начальные данные смещения в соответствии с процедурой инициализации смещения, которая работает в первом режиме или втором режиме, причем в первом режиме к сохраненным данным смещения обращаются или извлекают их из таблицы соответствий, сохраненной в устройстве хранения данных, ассоциированном с приемником с определением местоположения, чтобы заполнить кинематический механизм реального масштаба времени, причем во втором режиме сохраненные данные смещения обеспечивают начальные грубые данные, содержащие предварительно запрограммированное смещение по умолчанию, ассоциированное с соответствующими аппаратными средствами приемника с определением местоположения;
компенсируют межканальное смещение путем оценивания коэффициента компенсации на основе определения двойной разности, ассоциированного с измеренной фазой третьей несущей и фазой четвертой несущей, причем коэффициент компенсации для межканального смещения в наборах неопределенностей двойной разности оценивают для вычитания данных предварительно запрограммированного или начального межканального смещения из остатка до подгонки кода с двойной разностью; и
определяют положение объекта на основе измеренной фазы первой несущей, измеренной фазы второй несущей, оцененного первого набора целочисленных неопределенностей, оцененного второго набора целочисленных неопределенностей и по меньшей мере одной из измеренной фазы третьей несущей и измеренной фазы четвертой несущей, и по меньшей мере одного из компенсированного третьего набора целочисленных неопределенностей и компенсированного четвертого набора целочисленных неопределенностей.
15. Способ по п. 14, дополнительно содержащий этап, на котором:
определяют измерения фазы несущей с одной разностью или определяют измерения кода псевдослучайной последовательности с одной разностью, ассоциированные с вторичными спутниками, чтобы определить ассоциированные дисперсии, причем измерениям назначена соответствующая временная отметка или указатель времени.
16. Способ по п. 14, в котором остаток до подгонки кода с двойной разностью определяется в соответствии со следующим уравнением:

где ΔϕJ - первая наблюдаемая фаза несущей с одной разностью, выраженная в единицах циклов, Δϕk - вторая наблюдаемая фаза несущей с одной разностью, выраженная в единицах циклов;
λj и ƒj - длина волны и частота соответственно у сигнала несущей, ассоциированного с первой наблюдаемой фазой несущей с одной разностью; λk и ƒk - длина волны и частота соответственно у сигнала несущей, ассоциированного со второй наблюдаемой фазой несущей с одной разностью; ΔNj - первая целочисленная неопределенность с одной разностью, ассоциированная с первой наблюдаемой фазой несущей с одной разностью; ΔNk - вторая целочисленная неопределенность с одной разностью, ассоциированная со второй наблюдаемой фазой несущей с одной разностью; ΔI/fj 2 - ионосферная задержка с одной разностью для первой наблюдаемой фазы несущей с одной разностью,  - ионосферная задержка с одной разностью для второй наблюдаемой фазы несущей с одной разностью, где I - функция Полной концентрации электронов; и
- ионосферная задержка с одной разностью для второй наблюдаемой фазы несущей с одной разностью, где I - функция Полной концентрации электронов; и  - шум наблюдения фазы несущей;
- шум наблюдения фазы несущей;  - геометрическое расстояние с одной разностью; и
- геометрическое расстояние с одной разностью; и  - межканальное смещение для измерений фазы несущей с одной разностью (SD).
- межканальное смещение для измерений фазы несущей с одной разностью (SD).
17. Способ по п. 14, дополнительно содержащий этап, на котором:
калибруют оценку межканального смещения в соответствии с калибровкой с одной разностью, чтобы учесть изменения в спутниках, принятых или доступных приемнику с определением местоположения, путем преобразования остатков после подгонки с двойной разностью в остатки с одной разностью.
18. Способ по п. 14, дополнительно содержащий этапы, на которых:
назначают указатели времени или временные отметки соответствующим измерениям фазы несущей с одной разностью или измерениям кода псевдослучайной последовательности, ассоциированным с вторичными спутниками, и ассоциированным дисперсиям, и
после обработки всех данных эпох, что подтверждается временными отметками, калибруют оценку межканального смещения в соответствии с калибровкой с одной разностью, чтобы учесть изменения в спутниках, принятых или доступных приемнику с определением местоположения, путем преобразования остатков после подгонки с двойной разностью в остатки с одной разностью.
19. Способ по п. 14, дополнительно содержащий этап, на котором:
контролируют уровень качества у коэффициента компенсации, причем уровень качества основан на том, имеется ли значительный скачок или резкое изменение в величине коэффициента компенсации за период времени выборки.
20. Способ по п. 19, дополнительно содержащий этап, на котором:
контролируют уровень качества у коэффициента компенсации, причем уровень качества основан на возникновении значительного скачка и на том, отмечает ли алгоритм RAIM решение по коду с одной разностью или решение по фазе несущей с одной разностью как ненадежное.
21. Способ по п. 19, дополнительно содержащий этап, на котором:
сбрасывают информацию о смещении для конкретного спутника для сохранения в таблице соответствий или использования кинематическим механизмом реального масштаба времени, чтобы оценивать решения неопределенностей.
22. Способ по п. 14, дополнительно содержащий этап, на котором:
калибруют оценку межканального смещения, ассоциированного с фазами несущей вторичных спутников, в соответствии с калибровкой с одной разностью, чтобы учесть изменения в спутниках, принятых или доступных приемнику с определением местоположения, путем определения остатков в соответствии со следующим уравнением:

где  - измерения фазы несущей GPS с одной разностью, L1 либо L2;
- измерения фазы несущей GPS с одной разностью, L1 либо L2;
 - теоретический диапазон одной разности;
- теоретический диапазон одной разности;
 - тактовые импульсы приемника GPS с одной разностью;
- тактовые импульсы приемника GPS с одной разностью;
 - ионосферное влияние с одной разностью;
- ионосферное влияние с одной разностью;
 - тропосферное влияние с одной разностью;
- тропосферное влияние с одной разностью;
 - шум при измерении фазы несущей;
- шум при измерении фазы несущей;
 - измерения фазы несущей GLONASS с одной разностью, G1 либо G2;
- измерения фазы несущей GLONASS с одной разностью, G1 либо G2;
 - тактовые импульсы приемника GLONASS с одной разностью;
- тактовые импульсы приемника GLONASS с одной разностью;
 - межканальное смещение фазы несущей с одной разностью для GLONASS; и
- межканальное смещение фазы несущей с одной разностью для GLONASS; и
 - межсистемное смещение между GPS и GLONASS.
- межсистемное смещение между GPS и GLONASS.
23. Способ по п. 22, дополнительно содержащий этап, на котором:
фильтруют оцененное межканальное смещение, ассоциированное с фазами несущей, с помощью фильтра нижних частот, чтобы поддерживать оценку смещения фазы несущей в реальном времени.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

