Настоящее изобретение относится к рабочей машине, которая включает в себя ось, несущую колеса, входящие в контактное взаимодействие с грунтом, которая является подвижной относительно кузова машины.
Более конкретно, но не исключительно, настоящее изобретение относится к рабочей машине, которая имеет рабочий рычаг, который является подвижным относительно кузова машины, причем рабочий рычаг несет рабочее средство, например погрузочный вилочный захват или ковш для выполнения земляных работ.
Однако настоящее изобретение может быть применено к другим рабочим машинам, например тракторам. Ось может быть подвешена из кузова или может быть закреплена для поворота вокруг оси поворота относительно кузова.
Такие рабочие машины требуются для вождения по грунту, который, как правило, будет включать в себя много неровностей поверхности. Для облегчения движения машины хорошо известен монтаж одной из осей для поворотного движения относительно кузова вокруг, в общем, горизонтальной оси, которая проходит в продольном направлении машины. Такое поворотное движение дает возможность колесам, переносимым осью, двигаться в ответ на неровности поверхности грунта, с которыми сталкиваются при движении машины.
Ранее были сделаны несколько предложений, например, в патентах US-B-6179304 или US-B-6082742 для управления поворотом оси в зависимости от параметров так, чтобы избегать возникающих состояний нестабильности машины. Такие предложения, соответствующие предшествующему уровню техники, дают возможность работы машины в особых рабочих режимах в зависимости от используемых параметров управления. Например, такие предложения, соответствующие предшествующему уровню техники, могут давать возможность свободного поворота оси в режиме разблокированной оси или могут давать возможность ограниченного поворота оси в так называемом мягком режиме. Машина автоматически побуждается к изменению рабочего режима при измерении параметра управления. Такое автоматическое переключение между одним рабочим режимом и другим может быть дезорганизующим для оператора машины.
В соответствии с одним аспектом настоящего изобретения мы обеспечиваем получение рабочей машины, которая включает в себя кузов и ось, которая смонтирована так, чтобы быть подвижной относительно кузова, причем ось несет на каждом конце или по направлению к каждому концу колеса, входящие в контактное взаимодействие с грунтом, посредством которых машина является подвижной на грунте (земле), при этом машина включает в себя датчик скорости, чувствительный к скорости движения машины относительно земли, и имеется гидравлическая система управления, включающая в себя, по меньшей мере, один исполнительный механизм системы управления, соединенный между кузовом и осью для регулирования движения оси относительно кузова, причем гидравлическая система дополнительно включает в себя, по меньшей мере, один клапан управления, который функционирует для ограничения потока жидкости, имеющего места как результат выдвижения или отведения исполнительного механизма системы управления в ответ на движения оси относительно кузова, на величину, зависящую от сигнала скорости машины, обеспечиваемого датчиком скорости, при этом клапан управления является электрическим клапаном управления, управляемым пропорционально с помощью контроллера клапана, который реагирует на изменения в скорости машины путем регулирования ограничения потока жидкости так, чтобы разрешать больший поток жидкости при увеличении скорости машины.
В силу настоящего изобретения движение оси в ответ на неровности грунта, с которым входят в контактное взаимодействие колеса машины, регулируется в зависимости от скорости машины путем ограничения потока жидкости, например, к исполнительному механизму системы управления и/или от исполнительного механизма системы управления, и предпочтительно степень (величина) ограничения потока жидкости непрерывно изменяется в ответ на изменения скорости машины. Таким образом, отсутствует переключение между режимами работы в ответ на скорость машины относительно земли. В одном примере клапан управления является электрическим клапаном управления, управляемым контроллером клапана, который реагирует на изменения в скорости машины путем пропорционального или непропорционального регулирования ограничения потока жидкости.
В одном примере, выше пороговой скорости клапан управления может, по существу, не ограничивать поток жидкости.
Если машина неподвижна, то контроллер управляет клапаном управления для предотвращения потока жидкости в гидравлической системе так, чтобы препятствовать движению оси относительно кузова, и контроллер управляет клапаном управления для разрешения большего потока жидкости, когда скорость машины увеличивается, по меньшей мере, до пороговой скорости, при которой клапан управления может обеспечивать, по существу, неограниченный поток жидкости, так что ось может свободно двигаться, как разрешено ее креплением.
Однако при необходимости, когда машина неподвижна, то некоторое ограничение потока жидкости может быть разрешено при приеме контроллером вспомогательного сигнала от ручного приспособления управления, например, датчика положения рычага управления или переключателя.
Например, рабочая машина может включать в себя пару стабилизаторов, которые оба опускаются из кузова в контактное взаимодействие с грунтом в удаленных положениях, предпочтительно на каждой стороне кузова, для стабилизации машины при выполнении рабочей операции, при этом оператор управляет рычагом управления стабилизаторами или переключателем. Когда стабилизаторы входят в контактное взаимодействие с грунтом, поверхность грунта может быть на другом уровне на одной стороне кузова, по сравнению с другой. Путем разрешения ограниченного потока жидкости к клапану управления и/или от клапана управления во время опускания стабилизатора, стабилизаторы могут войти в контактное взаимодействие с грунтом, тогда как ось может двигаться так, чтобы оба колеса на оси могли оставаться в контакте с грунтом.
В другом примере машина может включать в себя дополнительную ось, которая смонтирована так, чтобы быть подвижной относительно кузова, причем дополнительная ось несет на каждом конце или по направлению к каждому концу колеса, находящиеся в контактном взаимодействии с грунтом, посредством которых машина движется по грунту (земле). Машина может включать в себя дополнительный привод бокового перемещения, соединенный между кузовом и дополнительной осью для побуждения движения дополнительной оси относительно кузова. Такая возможность, которая известна как «боковое перемещение» обеспечивается для облегчения выравнивания кузова машины для выполнения рабочих технологических операций, когда машина неподвижна.
Привод бокового перемещения управляется посредством ручного рычага управления боковым перемещением или переключателем, и желательно при управлении рычагом управления боковым перемещением или переключателем, когда машина неподвижна, чтобы обеспечивался вспомогательный входной сигнал к контроллеру, который реагирует путем разрешения ограниченного потока жидкости.
В предпочтительном варианте осуществления гидравлическая система включает в себя пару исполнительных механизмов системы управления, которые включают в себя поршни в цилиндрах, по одному на каждом конце или по направлению к каждому концу оси, клапаны управления регулируют поток жидкости из цилиндра на одной стороне поршня одного из исполнительных механизмов системы управления, к цилиндру на одной стороне поршня другого из исполнительных механизмов системы управления. В другом примере, тем не менее, один исполнительный механизм системы управления может быть предусмотрен с клапаном управления, регулирующим поток жидкости из цилиндра на одной стороне поршня к цилиндру на другой стороне поршня.
Настоящее изобретение было, в частности, но не исключительно, разработано для рабочей машины, которая включает в себя погрузочный рычаг, который поворачивается относительно кузова для движения вверх и вниз относительно машины, например, в задней части кузова, причем погрузочный рычаг проходит за передний конец кузова и крепит средство для выполнения погрузочно-разгрузочных операций. Погрузочный рычаг может телескопически выдвигаться и отводиться. Стабильность (устойчивость) такой машины, в частности, погрузочно-разгрузочные операции осуществляются на большой высоте над кузовом машины и далеко от кузова машины, является ответственной. Настоящее изобретение, в котором клапан управления является управляемым для предотвращения или, по меньшей мере, ограничения потока жидкости и, следовательно, движения оси, обеспечивает максимальную стабильность во время выполнения погрузочно-разгрузочных операций. Исполнительный механизм системы управления предпочтительно предусмотрен между задней осью и кузовом, а ось с приводом бокового перемещения, где предусмотрен, является передней осью.
Настоящее изобретение, тем не менее, может быть применено для многих других рабочих машин, которые имеют рабочие рычаги, например, машины для выполнения земляных работ, погрузочные машины и машины, которые способны к выполнению, как земляных работ, так и погрузочных операций, а также к тракторам и подобным рабочим машинам.
В предпочтительном варианте осуществления ось, движение которой регулируется гидравлической системой в ответ на скорость машины относительно земли, может быть поворотной относительно кузова вокруг, по существу, горизонтальной оси поворота, которая проходит в продольном направлении машины.
В другом варианте осуществления ось может быть подвешена из кузова с помощью тяг регулирования пружинной подвески.
В каждом случае другая из осей может поворачиваться относительно кузова или подвешена из кузова.
В соответствии со вторым аспектом настоящего изобретения мы обеспечиваем способ функционирования рабочей машины, которая включает в себя кузов и ось, которая закреплена так, чтобы быть подвижной относительно кузова, причем ось несет на каждом конце или по направлению к каждому концу входящие в контактное взаимодействие с грунтом колеса, посредством которых машина является подвижной на грунте, машина включает в себя датчик скорости, чувствительный к скорости машины относительно земли, и имеется гидравлическая система управления, включающая в себя, по меньшей мере, один исполнительный механизм системы управления, соединенный между кузовом и осью для регулирования движения оси относительно кузова, при этом гидравлическая система дополнительно включает в себя, по меньшей мере, один клапан управления, который является регулируемым для ограничения потока жидкости, имеющего место как результат выдвижения или отведения исполнительного механизма системы управления в ответ на движения оси относительно кузова, предусматривающий ограничение потока жидкости пропорционально в зависимости от сигнала, обеспечиваемого датчиком скорости.
В соответствии с третьим аспектом настоящего изобретения мы обеспечиваем способ функционирования рабочей машины, которая включает в себя кузов и ось, которая закреплена так, чтобы быть подвижной относительно кузова, причем ось несет на каждом конце или по направлению к каждому концу входящие в контактное взаимодействие с грунтом колеса, посредством которых машина является подвижной на грунте, машина включает в себя датчик скорости, чувствительный к скорости машины относительно земли, и имеется гидравлическая система управления, включающая в себя, по меньшей мере, один исполнительный механизм системы управления, соединенный между кузовом и осью для регулирования движения оси относительно кузова, и, по меньшей мере, один клапан управления, который является регулируемым, по меньшей мере, для ограничения потока гидравлической жидкости в системе, имеющего место как результат выдвижения или отведения исполнительного механизма системы управления в ответ на движения оси относительно кузова, и контроллер, который обеспечивает командные сигналы к клапану управления для изменения ограничения потока жидкости в зависимости от режима, при этом рабочая машина включает в себя вспомогательное гидравлическое сервисное устройство и при работе вспомогательного гидравлического сервисного устройства ограничение потока гидравлической жидкости, иначе обеспечиваемое посредством клапана управления в соответствии с режимом управления, по меньшей мере, частично снимается.
В одном примере вспомогательное гидравлическое сервисное устройство является сервисным устройством для подъема и опускания стабилизаторов машины, которое может стабилизировать машину при выполнении рабочей операции, в случае которой, когда стабилизаторы опущены по направлению к грунту, ограничение потока жидкости в гидравлической системе управления может быть, по меньшей мере, частично снято. Например, движение части конструкции управления стабилизаторами может управлять устройством, которое обеспечивает вспомогательный входной сигнал к контроллеру. Устройство управления стабилизаторами может быть ручным при ручном управлении оператором рычагом управления стабилизаторами или переключателем.
В другом примере дополнительно или альтернативно вспомогательное сервисное устройство является сервисным устройством для побуждения движения дополнительной оси машины относительно кузова, причем сервисное устройство включает в себя привод бокового перемещения, соединенный между кузовом и дополнительной осью, и ограничение потока жидкости в гидравлической системе управления может быть, по меньшей мере, частично снято, когда приводом бокового перемещения управляют на управляемой конструкции управления боковым перемещением. Движением части конструкции управления боковым перемещением может управлять устройство, которое обеспечивает вспомогательный входной сигнал к контроллеру, который реагирует путем снятия ограничения потока. Устройство управления боковым перемещением может быть ручным при управлении вручную оператором рычагом управления бокового перемещения или переключателем.
В каждом случае клапан управления может в отсутствие вспомогательного входного сигнала быть управляемым для ограничения потока жидкости в гидравлической системе управления, имеющего места как результат выдвижения или отведения исполнительного механизма системы управления в ответ на движения оси относительно кузова на величину, зависящую от сигнала скорости машины, обеспечиваемого датчиком скорости машины. Таким образом, клапан управления может быть электрическим клапаном управления, управляемым пропорционально контроллером, который реагирует на изменения в скорости машины путем регулирования ограничения потока жидкости так, чтобы разрешать больший поток жидкости при увеличении скорости машины.
Варианты осуществления настоящего изобретения теперь будут описаны со ссылкой на сопроводительные чертежи, где
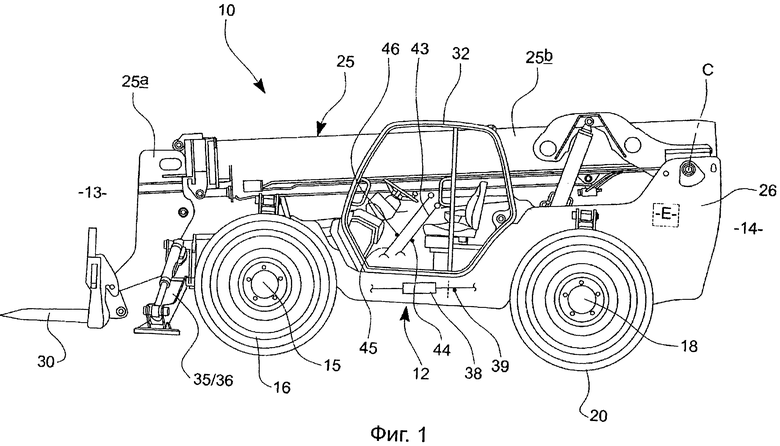
Фиг.1 - вид сбоку рабочей машины, соответствующей настоящему изобретению;
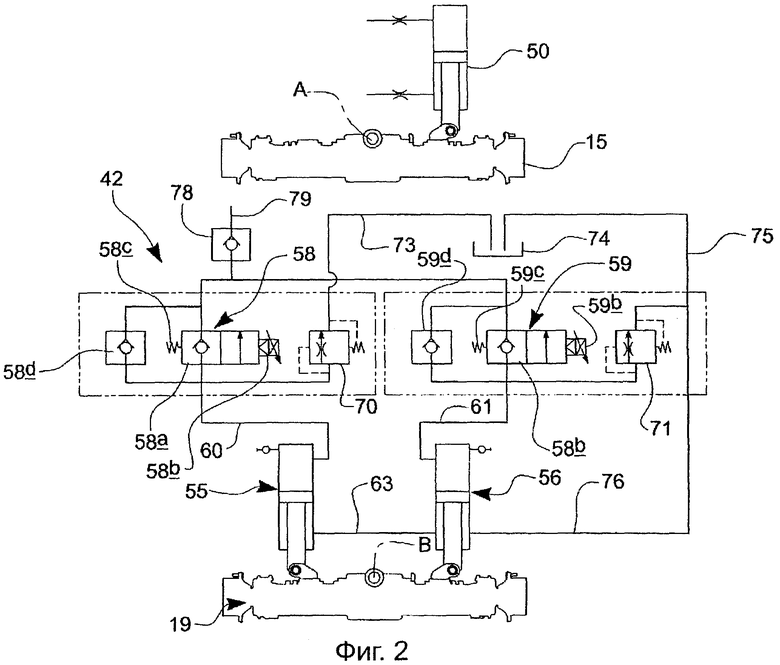
Фиг.2 - иллюстрация части машины, иллюстрируемой на фиг.1, включая ее гидравлическую схему;
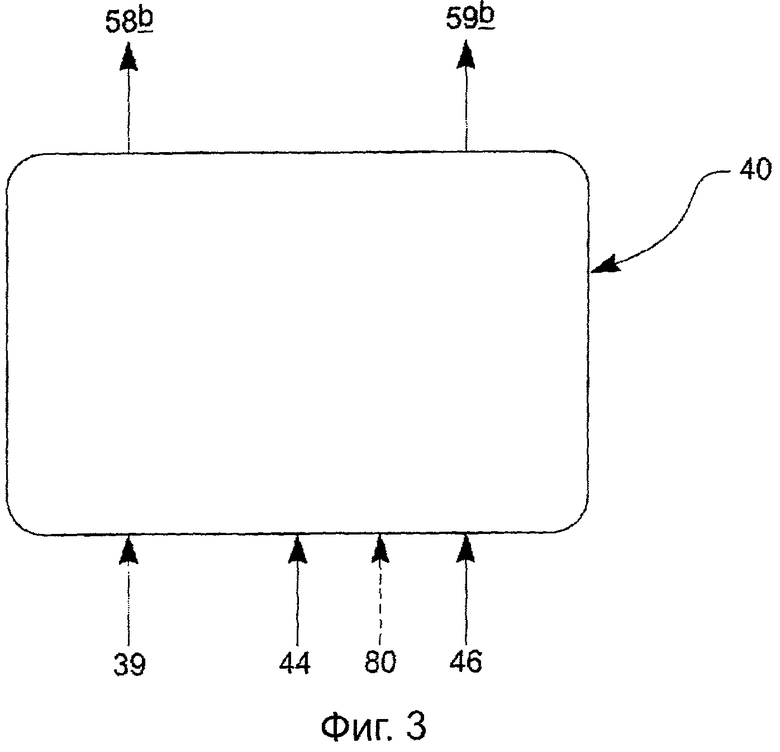
Фиг.3 - диаграмма, иллюстрирующая контроллер для использования в машине, соответствующей настоящему изобретению;
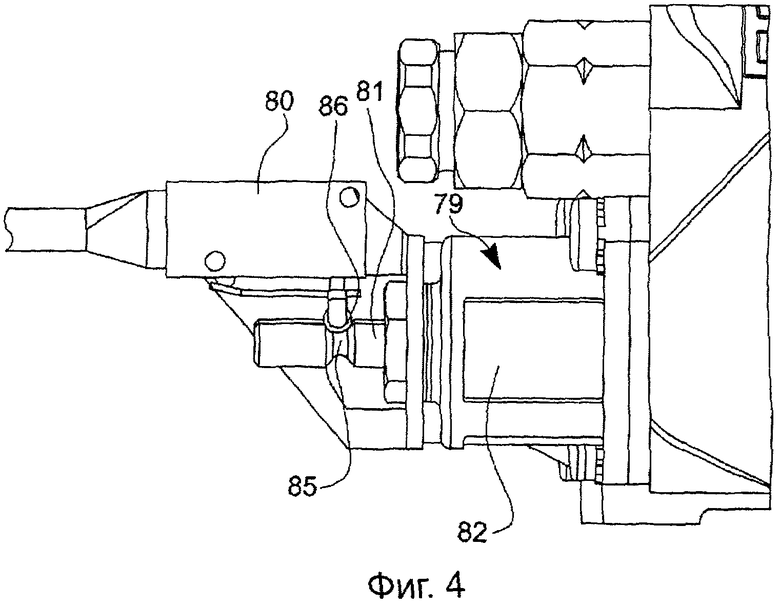
Фиг.4 - иллюстративный чертеж, показывающий часть вспомогательного гидравлически управляемого функционирования машины, иллюстрируемой на фиг.1 и фиг.2.
Как следует из сопроводительных чертежей, рабочая машина 10 в этом примере является машиной для выполнения погрузочно-разгрузочных операций, которая включает в себя кузов 12, имеющий передний конец 13 и задний конец 14. По направлению к переднему концу машины 10 имеется передняя ось 15, которая несет на каждом конце или вблизи каждого конца переднее колесо 16, а по направлению к заднему концу 14 имеется задняя ось 18, которая несет на каждом конце или вблизи каждого конца заднее колесо 20.
Каждая из передней 15 и задней 18 осей в этом примере смонтирована с возможностью поворота относительно кузова 12 вокруг соответствующих осей А, В поворота. Оси А, В поворота, в общем, являются горизонтальными и проходящими в продольном направлении машины 10, и в этом примере являются, по существу, соосными.
Машина 10 дополнительно крепит погрузочный рычаг 25 для поворотного движения вверх и вниз вокруг дополнительной, в общем, горизонтальной оси С, которая является поперечной осям А, В поворота осей 15, 18. Погрузочный рычаг 25 закреплен на крепежной конструкции 26 на заднем конце 14 или по направлению к заднему концу 14 кузова 12 и проходит вперед за передний конец 13 кузова 12.
Погрузочный рычаг 25 включает в себя множество секций 25а, 25b, которые поддаются телескопическому выдвижению относительно друг друга с помощью внутренних гидроприводов, а на внешнем конце погрузочного рычага 25 имеется погрузочное средство, которое представляет собой пару элементов 30 вилочного захвата погрузчика.
Кузов 12 несет кабину 32 оператора, где оператор сидит и управляет машиной 10, а в этом примере кабина 32 находится на одной стороне кузова 12, тогда как погрузочный рычаг 25 смонтирован сбоку на другой стороне кузова 12 относительно кабины 32.
Двигатель Е, предназначенный для обеспечения машины 10 мощностью, показан смонтированным по направлению к заднему концу 14 машины 10, но в другом примере он может быть смонтирован сбоку. Двигатель Е приводит во вращение колеса 16, 20 машины 10 через посредство механической или гидростатической трансмиссии 38, а датчик 39 скорости относительно земли измеряет движение части трансмиссии 38, например вращение шестерни или карданного вала, причем датчик 39 скорости при использовании обеспечивает входной сигнал к контроллеру 40, который указывает на скорость машины относительно земли, сигнал которого используется контроллером 40 для управления работой гидравлической системы 42 машины 10, которая будет более конкретно описана ниже со ссылкой на фиг.2. Например, датчик 39 скорости может быть датчиком холла.
В этом примере машина 10 дополнительно включает в себя пару рычагов 35, 36 стабилизаторов, по одному рычагу, предусмотренному на каждой стороне кузова 12, расположенных в этом примере на переднем конце 13 машины 10. Рычаги 35, 36 стабилизаторов при использовании опущены в контактное взаимодействие с грунтом для стабилизации машины 10 во время рабочих технологических операций, как описано ниже, а когда они не находятся в использовании, они подняты в походное (сложенное) положение. Рычаги 35, 36 стабилизаторов предпочтительно поднимают и опускают с помощью вспомогательного сервисного устройства с гидравлическим приводом, которое включает в себя соответствующие гидроприводы.
В кабине 32 оператора предусмотрен ручной рычаг 43 управления рычагами стабилизаторов, который при использовании побуждает рычаги 35, 36 стабилизаторов подниматься или опускаться, причем в этом примере имеется датчик 44 движения рычага управления стабилизаторами, предназначенный для измерения движений рычага 43 управления рычагами стабилизаторов от исходного положения. В кабине 32 также имеется ручной рычаг 45 управления боковым перемещением, цель которого будет описана ниже, и имеется датчик 46 измерения движения рычага управления боковым перемещением, предназначенный для измерения перемещений рычага 45 боковым перемещением от нейтрального положения.
Как датчик 44 рычага управления рычагами стабилизаторов, так и датчик 46 рычага управления боковым перемещением, при измерении перемещения от нейтрального положения соответствующего рычага 43, 45 управления обеспечивает сигнал к контроллеру 40.
Как следует из фиг.2 и фиг.3, между передней осью 15 и кузовом 12 имеется привод 50 бокового перемещения, который в этом примере является гидроприводом движения в двух направлениях типа поршень в цилиндре. Под управлением оператора, управляющим рычагом 45 управления боковым перемещением, привод 50 бокового перемещения может быть выдвинут или отведен для поворота передней оси 15 относительно кузова 12 для изменения пространственного положения кузова 12 относительно грунта. Таким образом, в том случае, когда требуется выполнение технологической рабочей операции, а кузов 12 машины 10 и, следовательно, погрузочный рычаг 25 не находится в выровненном по уровню пространственном положении, привод 50 бокового перемещения может быть выдвинут или отведен для выравнивания по уровню кузова 12 для компенсации невыровненной поверхности грунта.
В отличие от этого передняя ось 15 является жесткой относительно кузова 12, в частности, когда машина 10 движется по поверхности грунта.
При необходимости, возможность управления оператором боковым перемещением может предотвращаться на очень низких скоростях и когда машина 10 находится в неподвижном состоянии.
В этом примере между задней осью 18 и кузовом 12 имеется пара исполнительных механизмов 55, 56 системы управления гидравлической системы, по одному на каждой стороне оси В поворота. Каждый исполнительный механизм 55, 56 системы управления и в этом случае является типом поршня в цилиндре и может быть гидроприводом движения в двух направлениях, как показано на чертежах, или в одном направлении.
Цилиндры исполнительных механизмов 55, 56 системы управления на некольцевых сторонах исполнительных механизмов 55, 56 системы управления взаимно соединены через посредство гидравлической системы 42, которая включает в себя пару клапанов 58, 59 управления, причем каждый клапан 58, 59 управления предусмотрен в соответствующей гидравлической линии 60, 61, которая проходит к соответствующим исполнительным механизмам 55, 56 системы управления и от соответствующих исполнительных механизмов 55, 56 системы управления.
Каждый клапан 58, 59 управления является электрическим пропорциональным клапаном, причем электрическое управление осуществляется контроллером 40. Каждый клапан 58, 59 управления обеспечивает возможность, по существу, неограниченного потока гидравлической жидкости к некольцевой стороне соответствующих исполнительных механизмов 55, 56 системы управления через посредство тарельчатого клапана 58а, 59а, но поток жидкости от некольцевых сторон соответствующих исполнительных механизмов 55, 56 системы управления регулируется в зависимости от степени открывания клапанов 58, 59 управления, которая зависит от управляющего сигнала, принимаемого от контроллера 40. Каждый из клапанов 58, 59 управления может иметь соленоид или другой электрический привод, как показано в позициях 58b, 59b.
Теперь будет описана работа гидравлической системы 42.
При движении задней оси 18 в ответ на нерегулярности поверхности грунта, когда машина 10 движется по грунту, в зависимости от условий работы клапанов 58, 59 управления, может быть разрешен или не может быть разрешен поворот задней оси 18 относительно кузова 12.
При измеренной скорости относительно земли посредством датчика скорости 39 машины, превышающей пороговую скорость, например, 4 км/ч, контроллер 40 передает сигналы соответствующим соленоидам 58b, 59b для полного открывания клапанов 58, 59 управления для обеспечения возможности, по существу, свободного потока жидкости по линиям 60, 61. Таким образом, когда машина 10 движется при пороговой скорости или выше, задняя ось может поворачиваться вокруг ее оси В поворота в ответ на неровности в поверхности грунта, как разрешено ее креплением, причем поток жидкости проходит от одной некольцевой стороны поршня исполнительного механизма 55, 56 системы управления к некольцевой стороне поршня другого исполнительного механизма 56, 55 системы управления в зависимости от того, какая сторона оси 18 поднимается и опускается относительно кузова 12. Таким образом, кузов 12 машины может оставаться более выровненным, чем в том случае, если бы задняя ось 18 была бы жестко смонтирована, несмотря на неровности поверхности грунта.
Когда машина 10 неподвижна или по существу неподвижна, контроллер 40 будет реагировать на сигнал от датчика 39 скорости посредством сигнала к соленоидам клапанов 58, 59 для закрывания, например, путем отключения какой-либо электрической мощности к соленоидам 58b, 59b вместе, так что клапаны 58, 59 управления закрываются с помощью соответствующих механических пружин 58с, 59с. Таким образом, жидкости не будет разрешено проходить от любой из некольцевых сторон исполнительных механизмов 55, 46 системы управления к другой некольцевой стороне, а задняя ось 18 будет заблокирована относительно кузова 12. Таким образом, когда машина 10 выполняет технологические рабочие операции, будучи неподвижной, заблокированная задняя ось обеспечит максимальную стабильность.
При скоростях между нулевой и пороговой скоростью контроллер 40 реагирует на сигнал от датчика 39 скорости в соответствии, например, с режимом программного управления, путем разрешения ограниченного потока жидкости между некольцевыми сторонами исполнительных механизмов 55, 56 системы управления. Например, величина ограничения может быть пропорциональна скорости машины 10 для пороговой скорости. Это частичное ограничение потока жидкости достигается, когда контроллер 40 обеспечивает сигналы к соленоидам 58b, 59b клапанов 58, 59 управления частично для открывания клапанов 58, 59 против давлений пружин 58с, 59с, предпочтительно пропорционально скорости машины в соответствии с сигналами датчика 39 скорости.
Таким образом, при скоростях до пороговой скорости разрешен смягчающий поворот задней оси 18 относительно кузова 12, причем степень смягчения зависит от скорости машины 10. Таким образом, когда скорость машины 10 увеличивается от нуля, когда требуется большая аккомодация условий неровной поверхности грунта, степень смягчающего движения задней оси 18 уменьшается до минимума при достижении пороговой скорости.
Поскольку клапаны 55, 56 управления являются пропорциональными клапанами, отсутствует внезапное изменение между одним дискретным режимом работы и другим, но степень изменения в величине смягчения движения задней оси 18, когда машина 10 ускоряет и замедляет движение, является непрерывной.
Когда машина 10 является неподвижной для выполнения рабочих технологических операций, рычаги 35, 36 стабилизаторов могут быть опущены с помощью вспомогательного гидравлического сервисного устройства. Движение рычага 43 управления рычагами стабилизаторов измеряется посредством датчика 44 и обеспечивается вспомогательный сигнал к контроллеру 40, который реагирует снятием ограничения потока жидкости, иначе обеспечиваемое клапанами 58, 59 управления в соответствии с режимом управления. В этом примере, где клапаны 58, 59 управления полностью закрыты, когда машина 10 неподвижна, контроллер 40 реагирует на вспомогательный входной сигнал от датчика 44 путем частичного открывания клапанов 58, 59 управления, даже хотя машина 10 неподвижна, таким образом, вспомогательный входной сигнал от датчика 44 рычагов стабилизаторов является главным. В одном примере клапаны 58, 59 управления могут быть открыты для ограничения потока жидкости приблизительно на 50%, как результат вспомогательного входного сигнала от датчика 44. Когда клапаны 58, 59 управления являются пропорциональными клапанами, это означает, что клапаны 58, 59 управления обязательно должны быть полуоткрытыми против усилий соответствующих закрывающих пружин 58с, 59с.
Когда рычаги 35, 36 стабилизаторов опущены в контактное взаимодействие с грунтом для переноса груза, рычаг 43 управления освобожден и возвращается в его нейтральное положение, например, под действием пружины, а контроллер 40 и в этом случае будет блокировать заднюю ось 18 путем закрывания клапанов 58, 59 управления.
Кроме того, если требуется регулировать уровень передней оси 15 управлением приводом 50 бокового перемещения, когда машина 10 неподвижна или медленно движется, то клапаны 58, 59 управления полностью закрываются контроллером 40 в соответствии с режимом управления, а датчик 46 движения рычага 45 управления приводом бокового перемещения передаст сигнал контроллеру 40. Контроллер 40 будет реагировать частичным открыванием клапанов 58, 59 управления, и в этом случае, например, на 50%, для снятия ограничения потоку жидкости между исполнительными механизмами 55, 56 системы управления для разрешения смягчаемых движений задней оси 18. И в этом случае, если рычаг 45 управления приводом бокового перемещения освобожден и возвращается, например, под управлением пружины в нейтральное положение, то задняя ось 18 снова будет заблокирована, так как клапаны 58, 59 управления закрываются, так что жидкость не может проходить к исполнительным механизмам 55, 56 системы управления и/или из исполнительных механизмов 55, 56 системы управления.
Обеспечение вспомогательных входных сигналов от датчиков 44 и 46 для отмены режима управления, иначе диктуемого контроллером 40, дает возможность задним колесам 20 оставаться в контактном взаимодействии с грунтом, когда машина 10 выровнена, готовая для выполнения рабочих технологических операций, используя любой или оба рычага 35, 36 стабилизаторов или привод 50 управления боковым перемещением. Тогда как, как правило, клапаны 58, 59 управления будут полностью закрыты, когда обеспечивается вспомогательный входной сигнал от одного или обоих датчиков 44, 46, в частности, если машина 10 еще медленно движется по грунту, в общем, вспомогательный входной сигнал имеет эффект отмены обычного режима управления для снятия ограничения потока жидкости, которое иначе налагается.
В описанном примере датчики 44, 46 описаны, как предусмотренные для измерения соответствующих движений частей соответствующих базовых деталей управления, а именно движений рычагов 43, 45 управления. В другом примере, иллюстрируемом на фиг.4, движение другой части базовой детали управления для привода 50 бокового перемещения или привода (приводов) рычага стабилизатора может обеспечивать вспомогательный входной сигнал к контроллеру 40.
Как иллюстрируется на фиг.4, можно видеть, что базовая деталь для привода 50 бокового перемещения включает в себя гидравлический клапан 79 управления, имеющий катушку 81, которая движется в корпусе 82 клапана, причем конец катушки 81 выходит из корпуса 82 клапана к внешнему положению. Когда катушка 81 движется в ответ на работу органа управления, например рычага 45 управления, или другого органа управления, который может быть непосредственно соединен с катушкой 81 или косвенно оперативно соединен с катушкой 81, например, через посредство гидропривода с обратной связью или электрической цепи возбуждения, катушка 81 достигнет положения, показанного на фиг.4.
На фиг.4 можно видеть, что катушка имеет паз 85 в конце катушки 81, внешнем относительно корпуса 82 клапана, и в этом примере, паз 85 совмещен с фиксатором 86, который может побуждаться упругим приспособлением, например пружиной или силой тяжести, к пазу 85. Если фиксатор 76 движется из паза 85, это вызовет сигнал к контроллеру 40, обеспечиваемый сигнальным устройством 80, с которым связан фиксатор 86, для индикации того, что привод 50 бокового перемещения является работающим, для обеспечения, таким образом, вспомогательного входного сигнала к контроллеру 40, который реагирует снятием ограничения к потоку жидкости между исполнительными механизмами 55, 56 системы управления, который иначе требовал бы режима управления.
В еще одном примере, не иллюстрируемом, вместо работы вспомогательного гидравлического сервисного устройства, обеспечивающего вспомогательный входной сигнал к контроллеру 40, по меньшей мере, частично для снятия ограничения к потоку жидкости между исполнительными механизмами 55, 56 системы управления, работа вспомогательного сервисного устройства может иначе, по меньшей мере, частично снять ограничение к потоку жидкости, например, посредством части конструкции управления, которая регулирует движение вспомогательного сервисного устройства к открытию перепускного клапана в цепи перепускного канала, или непосредственно воздействуя на исполнительные механизмы 55, 56 системы управления в каждом случае так, чтобы было, по меньшей мере, частично снято ограничение потока жидкости между исполнительными механизмами 55, 56 системы управления.
Ниже описываются следующие дополнительные элементы, которые иллюстрируются.
В иллюстрируемом примере исполнительные механизмы 55, 56 системы управления являются исполнительными механизмами, действующими в двух направлениях, а кольцевые стороны цилиндров взаимно соединены через посредство гидравлической линии 63, так что при выдвижении и отведении исполнительных механизмов 55, 56 системы управления под управлением гидравлической системы 42, происходит обмен жидкостью между кольцевыми сторонами исполнительных механизмов 55, 56 системы управления. В другом примере исполнительные механизмы 55, 56 системы управления могут быть исполнительными механизмами, действующими в одном направлении.
В том случае, если гидравлическая жидкость в гидравлической системе 42 становится нагретой в течение использования и, таким образом, расширяется, для гарантии того, что это не приведет в результате к нежелательному удлинению (выдвижению) исполнительных механизмов 55, 56 системы управления, в каждой гидравлической линии 60, 61 предусмотрен соответствующий перепускной клапан 70, 71 в одну сторону, причем перепускные клапаны обеспечивают поток жидкости между некольцевыми сторонами исполнительных механизмов 55, 56 системы управления и соответствующей отводящей линией 73, 75 низкого давления, каждая из которых проходит к резервуару 74 для гидравлической жидкости.
Линия 75 от перепускного клапана 71 к резервуару 74 также соединена через посредство линии 76 с каждой из кольцевых сторон исполнительных механизмов 55, 56 системы управления.
Таким образом, в условиях устойчивого состояния, в которых жидкость расширяется, избыток жидкости может поступать из гидравлических линий 60, 61, в которых предусмотрены исполнительные механизмы 58, 59 системы управления, через посредство соответствующих дросселируемых термических перепускных клапанов 70, 71 в соответствующие подводящие и отводящие линии 73, 75.
В случае любой потери объема гидравлической жидкости из гидравлической системы 42 вследствие утечки или усадки, которые могут в результате привести к нежелательным движениям исполнительных механизмов 55, 56 системы управления, жидкость может проходить из запаса 79 под давлением через посредство однопутевого клапана 78 в гидравлические линии 60, 61, в которых предусмотрены клапаны 58, 59 управления. Если клапаны 58, 59 управления закрыты, то жидкость может проходить в гидравлические линии 60, 61 между клапанами 58, 59 управления и исполнительными механизмами 55, 56 системы управления через посредство обратного клапана 58d, 59d.
Без отклонения от объема настоящего изобретения могут быть сделаны различные модификации.
Например, хотя в описанном примере предусмотрена пара исполнительных механизмов 55, 56 системы управления, по одному на каждой стороне задней оси 18, в другом варианте осуществления может быть предусмотрен один исполнительный механизм на одной стороне оси поворота В, причем поток жидкости между цилиндром на одной стороне поршня и цилиндром на другой стороне поршня регулируется посредством одного или более клапанов управления.
В другом примере, где, как иллюстрируется, имеется два исполнительных механизма 55, 56 системы управления, вместо каждого исполнительного механизма 55, 56 системы управления, имеющего в соответствующей гидравлической линии 60, 61 свой собственный клапан 58, 59 управления, в другом примере, поток жидкости между исполнительными механизмами 55, 56 системы управления или между одной стороной цилиндра и другой стороной, где предусмотрен один исполнительный механизм системы управления, может регулироваться одним клапаном управления.
В описанном примере опускание или подъем рычагов 35, 36 стабилизаторов достигают с помощью ручного органа управления, являющегося рычагом 43 управления, но это может быть достигнуто с помощью переключателя, который не только обеспечивает движение для стабилизатора, но также обеспечивает вспомогательный входной сигнал, характеризующий привод рычагов 35, 36 стабилизаторов, к контроллеру 40, так что не обязательно требуется отдельный датчик 44.
Переключатель может быть обеспечен вместо рычага 45 управления боковым перемещением, так что и в этом случае не обязательно предусматривается отдельный датчик 46 движения рычага управления боковым перемещением.
Хотя настоящее изобретение было описано в отношении к погрузочной машине 10, настоящее изобретение применимо к множеству различных рабочих машин. В погрузочных машинах альтернативной геометрии и/или в других альтернативных погрузочных машинах вместо стабилизируемой задней оси 18, как описано выше, способом, описанным для задней оси 18 в этом примере, может быть стабилизирована передняя ось 15 и/или передняя и задняя оси 15, 18.
В модифицированном варианте осуществления при необходимости к контроллеру 40 могут быть предусмотрены другие входные сигналы, которые оказывают влияние на работу гидравлической системы. Например, контроллер 40 не может открывать клапаны 58, 59 управления в ответ на сигнал от датчика 39 скорости в том случае, если действует стояночный тормоз, но подчиняется вспомогательному входному сигналу или входным сигналам, которые показывают поднимание или опускание рычагов 35, 36 стабилизаторов, или работу привода 50 бокового перемещения.
Безусловно, при необходимости, необходимо предусмотреть отсутствие возможности бокового перемещения или рычагов стабилизаторов. Вспомогательный сигнал к контроллеру 40, по меньшей мере, для частичного снятия ограничения потока жидкости, обеспечиваемого иначе, может быть при необходимости получен от любого соответствующего вспомогательного сервисного устройства.
В другом варианте осуществления задняя ось 18 или, по меньшей мере, ось, движение которой должно контролироваться гидравлической системой 42, не обязательно должна поворачиваться относительно кузова 12, как описано, ось 18 может быть подвешена из кузова посредством тяг регулирования пружинной подвески, которые дифференциально на каждой стороне машины 10 разрешают движения вверх и вниз оси 18 относительно кузова 12.
Амортизаторы, например механические или газовые пружины, потребуются для демпфирования (ослабления) движений оси.
Однако описанная гидравлическая система 42 еще может контролировать движения оси относительно кузова 12, по существу, таким способом, как описан для поворотной оси 18 иллюстрируемого варианта осуществления.
В каждом случае поворотной или подвесной оси 18, другая ось, например передняя ось 15, тоже может быть поворотной, как описано со ссылкой на фиг.2, или подвешенной из кузова 12, как требуется, хотя в случае подвесных осей 15, 18 потребуется два исполнительных механизма 50; 55, 56, по одному на каждом из концов соответствующей оси или по направлению к каждому из концов соответствующей оси.
Хотя в каждом примере, описанном выше, гидравлическая система 42 является только операционной для ограничения потока жидкости для предотвращения свободного движения оси, как разрешено ее креплением, ниже пороговой скорости, в другом примере, в котором величина ограничения потока жидкости может быть или может не быть пропорциональной скорости машины 10 относительно земли, гидравлическая система 42 может обеспечивать сопротивление потоку жидкости на величину, зависящую от скорости машины относительно земли во всем диапазоне скорости машины относительно земли.
Элементы, описанные в вышеприведенном описании или в приведенной ниже формуле изобретения или в сопроводительных чертежах, выраженные в их специфических формах или на основе значений для выполнения описанной функции или способа или процесса достижения описанного результата, соответственно, могут отдельно или в любой комбинации таких элементов быть использованы для реализации настоящего изобретения в различных его конфигурациях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО УСТРОЙСТВА | 2003 |
|
RU2309116C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАБОЧЕЙ МАШИНЫ | 2010 |
|
RU2517141C2 |
| РАБОЧАЯ МАШИНА | 2007 |
|
RU2458810C2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА С НАКОПИТЕЛЕМ КИНЕТИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2621408C2 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2012 |
|
RU2596386C2 |
| Система для автоматического опускания гидравлического подъемного механизма транспортного средства | 2022 |
|
RU2790890C1 |
| ЦИКЛ ПРОГРЕВА ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2596678C2 |
| СПОСОБ И СИСТЕМА ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2514617C2 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| УЛУЧШЕННОЕ ПРОГРЕВАНИЕ ГИДРАВЛИЧЕСКОЙ ЖИДКОСТИ С ИСПОЛЬЗОВАНИЕМ РЕВЕРСИРОВАНИЯ ВЕНТИЛЯТОРА С ГИДРОПРИВОДОМ | 2014 |
|
RU2658403C2 |
Группа изобретений относится к рабочей машине и способу ее функционирования. Рабочая машина содержит кузов, подвижную относительно кузова ось с колесами, датчик скорости, гидравлическую систему управления. Гидравлическая система управления включает исполнительный механизм системы управления, клапан управления. Исполнительный механизм установлен между кузовом и осью для регулирования движения оси относительно кузова. Клапан управления ограничивает поток жидкости в ответ на движения оси относительно кузова. Клапан управления является электрическим клапаном управления и управляется пропорционально с помощью контроллера клапана. Контроллер регулирует ограничение потока жидкости так, чтобы разрешать больший поток жидкости при увеличении скорости машины. Способ по первому и второму вариантам заключается в том, что гидравлическая система включает в себя клапан управления, который ограничивает поток жидкости в ответ на движения оси относительно кузова. В способе по второму варианту ограничение потока жидкости при работе вспомогательного гидравлического сервисного устройства частично снимают. Технический результат заключается в повышении стабилизации рабочей машины относительно земли. 3 н. и 22 з.п. ф-лы, 4 ил.
1. Рабочая машина, которая включает в себя кузов и ось, которая смонтирована так, чтобы быть подвижной относительно кузова, причем ось несет на каждом конце или по направлению к каждому концу колеса, входящие в контактное взаимодействие с грунтом, посредством которых машина является подвижной на грунте, при этом машина включает в себя датчик скорости, чувствительный к скорости движения машины относительно земли, и имеется гидравлическая система управления, включающая в себя, по меньшей мере, один исполнительный механизм системы управления, соединенный между кузовом и осью для регулирования движения оси относительно кузова, причем гидравлическая система дополнительно включает в себя, по меньшей мере, один клапан управления, который функционирует для ограничения потока жидкости, имеющего места как результат выдвижения или отведения исполнительного механизма системы управления в ответ на движения оси относительно кузова, на величину, зависящую от сигнала скорости машины, обеспечиваемого датчиком скорости, при этом клапан управления является электрическим клапаном управления, управляемым пропорционально с помощью контроллера клапана, который реагирует на изменения в скорости машины путем регулирования ограничения потока жидкости так, чтобы разрешать больший поток жидкости при увеличении скорости машины.
2. Машина по п.1, в которой степень ограничения потока жидкости непрерывно изменяется в ответ на изменения скорости машины.
3. Машина по п.1, в которой выше пороговой скорости клапан управления, по существу, не обеспечивает ограничения потока жидкости (по существу, не ограничивает потока жидкости).
4. Машина по п.1, в которой клапан управления является электрическим клапаном управления, управляемым контроллером клапана, который реагирует на изменения в скорости машины регулированием ограничения потока жидкости.
5. Машина по п.4, в которой, когда машина неподвижна, контроллер управляет клапаном управления для предотвращения потока жидкости в гидравлической системе и контроллер управляет клапаном управления пропорционально для разрешения большего потока жидкости, когда скорость машины увеличивается.
6. Машина по п.5, в которой контроллер управляет клапаном управления пропорционально для разрешения большего потока жидкости, когда скорость машины увеличивается от постоянной до пороговой скорости, при которой клапан управления не обеспечивает, по существу, ограничения потока жидкости.
7. Машина по п.5, в которой, когда машина неподвижна, разрешен некоторый ограниченный поток жидкости при контроллере, принимающем вспомогательный входной сигнал от ручного устройства управления.
8. Машина по п.7, в которой ручное устройство управления является рычагом управления или переключателем.
9. Машина по п.6, в которой рабочая машина включает в себя пару рычагов стабилизаторов, которые оба опускаются из кузова в контактное взаимодействие с грунтом, а при операторе, вручную управляющем ручным устройством управления для опускания рычагов, генерируется вспомогательный входной сигнал к контроллеру.
10. Машина по п.8, в которой машина включает в себя дополнительную ось, которая смонтирована так, чтобы быть подвижной относительно кузова, причем дополнительная ось несет на каждом конце или по направлению к каждому концу входящие в контактное взаимодействие колеса, посредством которых машина движется по грунту, при этом машина включает в себя дополнительный привод бокового перемещения, соединенный между кузовом и дополнительной осью для побуждения движения дополнительной оси относительно кузова, привод бокового перемещения управляется посредством ручного устройства управления для генерирования вспомогательного входного сигнала.
11. Машина по п.1, в которой гидравлическая система включает в себя пару исполнительных механизмов системы управления, которые включают в себя поршни в цилиндрах, по одному на каждом конце или по направлению к каждому концу оси, а клапан управления регулирует поток жидкости от цилиндра на одной стороне поршня одного из исполнительных механизмов системы управления к цилиндру на одной стороне поршня другого из исполнительных механизмов системы управления в ответ на движения оси.
12. Машина по п.1, которая включает в себя погрузочный рычаг, который поворачивается относительно кузова для движения вверх и вниз относительно кузова на заднем конце машины, при этом погрузочный рычаг проходит за передний конец машины и крепит рабочее средство для погрузочно-разгрузочных операций, осуществляемых с грузом.
13. Машина по п.12, в которой погрузочный рычаг поддается телескопическому выдвижению и отведению.
14. Машина по п.12, в которой исполнительный механизм системы управления предусмотрен между задней осью и кузовом.
15. Машина по п.12, в которой ось с приводом бокового перемещения является передней осью.
16. Способ функционирования рабочей машины, которая включает в себя кузов и ось, которая закреплена так, чтобы быть подвижной относительно кузова, причем ось несет на каждом конце или по направлению к каждому концу входящие в контактное взаимодействие с грунтом колеса, посредством которых машина является подвижной на грунте, машина включает в себя датчик скорости, чувствительный к скорости машины относительно земли, и имеется гидравлическая система управления, включающая в себя, по меньшей мере, один исполнительный механизм системы управления, соединенный между кузовом и осью для регулирования движения оси относительно кузова, при этом гидравлическая система дополнительно включает в себя, по меньшей мере, один клапан управления, который является регулируемым для ограничения потока жидкости, имеющего место как результат выдвижения или отведения исполнительного механизма системы управления в ответ на движения оси относительно кузова, предусматривающий ограничение потока жидкости пропорционально в зависимости от сигнала, обеспечиваемого датчиком скорости.
17. Способ функционирования рабочей машины, которая включает в себя кузов и ось, которая закреплена так, чтобы быть подвижной относительно кузова, причем ось несет на каждом конце или по направлению к каждому концу входящие в контактное взаимодействие с грунтом колеса, посредством которых машина является подвижной на грунте, и имеется гидравлическая система управления, включающая в себя, по меньшей мере, один исполнительный механизм системы управления, соединенный между кузовом и осью для регулирования движения оси относительно кузова, и, по меньшей мере, один клапан управления, который является регулируемым, по меньшей мере, для ограничения потока гидравлической жидкости в системе, имеющего место как результат выдвижения или отведения исполнительного механизма системы управления в ответ на движения оси относительно кузова, и контроллер, который обеспечивает командные сигналы к клапану управления для изменения ограничения потока жидкости в зависимости от режима управления, при этом рабочая машина включает в себя вспомогательное гидравлическое сервисное устройство и при работе вспомогательного гидравлического сервисного устройства ограничение потока гидравлической жидкости, иначе обеспечиваемое посредством клапана управления в соответствии с режимом управления, по меньшей мере, частично снимается.
18. Способ по п.17, в котором вспомогательное гидравлическое сервисное устройство является сервисным устройством для подъема и опускания стабилизаторов машины, которое может стабилизировать машину при выполнении рабочей операции, в случае которой, когда стабилизаторы опущены по направлению к грунту, ограничение потока жидкости в гидравлической системе управления, по меньшей мере, частично снимается.
19. Способ по п.18, в котором движение части конструкции управления стабилизаторами управляет устройством, которое обеспечивает вспомогательный входной сигнал к контроллеру.
20. Способ по п.17, в котором устройство управления стабилизаторами является ручным при ручном управлении оператором рычагом управления стабилизаторами или переключателем.
21. Способ по п.17, в котором вспомогательное сервисное устройство является сервисным устройством для побуждения движения дополнительной оси машины относительно кузова, причем сервисное устройство включает в себя привод бокового перемещения, соединенный между кузовом и дополнительной осью, и ограничение потока жидкости в гидравлической системе управления, по меньшей мере, частично снимается, когда приводом бокового перемещения управляют на управляемой конструкции управления боковым перемещением.
22. Способ по п.21, в котором движение части конструкции управления боковым перемещением управляет устройство, которое обеспечивает вспомогательный входной сигнал к контроллеру, который реагирует путем снятия ограничения потока.
23. Способ по п.21, в котором устройство управления боковым перемещением является ручным при управлении вручную оператором рычагом управления бокового перемещения или переключателем.
24. Способ по п.17, в котором клапан управления в отсутствии вспомогательного входного сигнала является управляемым для ограничения потока жидкости в гидравлической системе управления, имеющего места как результат выдвижения или отведения исполнительного механизма системы управления в ответ на движения оси относительно кузова на величину, зависящую от сигнала скорости машины, обеспечиваемого датчиком скорости машины.
25. Способ по п.24, в котором клапан управления является электрическим клапаном управления, управляемым пропорционально контроллером, который реагирует на изменения в скорости машины путем регулирования ограничения потока жидкости так, чтобы разрешать больший поток жидкости при увеличении скорости машины.
| US 5388857 А, 14.02.1995 | |||
| US 4264014 A, 28.04.1981 | |||
| Способ получения амидного соединения | 1986 |
|
SU1757473A3 |
| УСОВЕРШЕНСТВОВАНИЯ СИСТЕМЫ ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2145284C1 |

