ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Это изобретение относится к рабочей машине, имеющей управляющее устройство, причем машина включает в себя управляемую, приводную сцепляющуюся с грунтом структуру и работающую от гидравлического исполнительного механизма рабочую часть для осуществления рабочих операций. Примеры машин, к которым можно применить данное изобретение, являются погрузочные машины, экскаваторы и тракторы, каждый из которых включает трансмиссию для приведения машины в ход по земле.
Чаще всего управление сцепляющейся с почвой структурой такой машины производится с помощью рулевого колеса, что, как понимают специалисты, может включать любое управляющее устройство, содержащее непрерывную или множество отдельных круглых или примерно круглых проходящих по периферии захватываемых вручную внешних ободных части или частей, которые соединены одним или несколькими радиально проходящими элементами к центральной части, где рулевое колесо функционально соединено с рулевой колонкой, которую при работе поворачивают, чтобы управлять машиной. Таким образом, рулевое колесо не должно содержать точно круглый внешний обод.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
Известно, что такое рулевое колесо снабжают центральной ступицей, которая вращается вместе с рулевым колесом, или ступица может также быть неотъемлемой частью рулевого колеса, и ступица может нести одно или несколько управляющих устройств для управления различными службами. Однако, когда управляющие устройства являются переключателями и т.п., сложно и дорого создавать электрическое соединение между вращающейся ступицей и остальной частью машины.
Традиционно рабочая машина, такая как погрузочная машина или/и экскаватор или трактор, как известно, имеет ручку управления и управляющие устройства подобного типа, которые имеются для управления приводными вспомогательными службами машины, так, например, линейный гидравлический исполнительный механизм для подъема груза или копания, работы, плечо машины, управляемое гидравлическим управляющим клапаном. Однако работа такой ручки управления требует от оператора высвободить рулевое колесо хотя бы одной рукой, что нежелательно, когда нужно управлять вспомогательной службой одновременно с вождением и управлением машиной.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Согласно изобретению создана рабочая машина, которая содержит управляемую, приводную сцепляющуюся с почвой структуру и рабочую часть, работающую от гидравлического исполнительного механизма, для производства рабочих операций, и управляющее устройство для установки, рулевое устройство для обеспечивания управления сцепляющейся с почвой структурой и управляемое вручную управляющее устройство для управления работой гидравлического управляющего клапана, который при работе выборочно подает находящуюся под давлением гидравлическую жидкость, по меньшей мере, к одному исполнительному механизму для работы рабочей части. Рулевое устройство может содержать рулевое колесо, которое включает внешний обод, могущий вращаться относительно рамы с огибающей вращения вокруг оси для поворота рулевой колонки, которая коаксиальна или в принципе коаксиальна оси вращения рулевого колеса, причем рулевая колонка функционально соединена с сцепляющейся с почвой структурой для осуществления управления машиной при повороте. Устройство управления может, кроме того, включать ступицу, которая размещена внутри или в принципе внутри границы вращения внешнего обода рулевого колеса, и контроллер, причем ступица фиксирована относительно рамы и работающее вручную управляющее устройство снабжено ступицей и при работе подает сигнал в контроллер, который реагирует, приводя в действие гидравлический управляющий клапан.
Таким образом, машина может быть снабжена управляющим устройством, посредством которого оператор может управлять машиной и может заставлять работать, по меньшей мере, один гидравлический исполнительный механизм без необходимости выпускать рулевое колесо и, более того, поскольку ступица, которая несет на себе вспомогательное управляющее устройство, фиксирована относительно рамы, создается значительно упрощенное и менее дорогое решение по сравнению с известным управляющим устройством с вращающимися ступицами, имеющимся на транспортных средствах.
Ступица может содержать дисплей, например экран дисплея для отображения рабочего статуса функции машины, такого как, например, статус двигателя машины или рабочее состояние, по меньшей мере, одного гидравлического исполнительного механизма или управляемой рабочей части. Оператор может выбирать информацию, отображаемую на дисплее.
Рабочая часть машины, которой необходимо управлять, может содержать рабочее плечо, смонтированное с возможностью вращения вокруг оси (шарнирно) у внутреннего конца на корпусе машины для перемещения относительно корпуса посредством гидравлического исполнительного механизма, и рабочее плечо включает множество относительно подвижных частей, один или несколько дополнительных гидравлических исполнительных механизмов, и машина содержит рабочий инструмент, установленный на внешнем конце рабочего плеча и способный перемещаться относительно рабочего плеча одним или несколькими еще дополнительными гидравлическими исполнительными механизмами, причем один из исполнительных механизмов является, по меньшей мере, одним исполнительным механизмом, управляемым ручным управляющим устройством, созданным ступицей устройства управления.
Структура ступицы может обеспечивать множество работающих вручную управляющих устройств, каждое из которых может работать при приведении в действие для подачи сигнала в контроллер, который реагирует, приводя в действие соответствующий гидравлический управляющий клапан, который затем подает находящуюся под давлением гидравлическую жидкость в соответствующий гидравлический исполнительный механизм рабочего плеча и рабочего инструмента.
При желании функции множества ручных устройств управления можно снова конфигурировать, например, используя управляемое процессором меню на дисплее, если он имеется, чтобы позволить управляющим устройствам управлять альтернативными гидравлическими исполнительными механизмами.
Предпочтительно работающее вручную управляющее устройство или каждое из них, обеспечиваемое ступицей, может работать от прикосновения пальцев или/и руки оператора, когда оператор держит внешний обод рулевого колеса, хотя ступица может содержать дополнительные управляющие устройства, для работы которых нужно отпустить внешний обод рулевого колеса. Однако предпочтительно такие дополнительные управляющие устройства обычно не требуются для работы, когда машина находится в движении, так что такое одновременное управление вряд ли потребуется.
Рулевое колесо предпочтительно включает в себя один непрерывный внешний обод, являющийся круглым или в принципе круглым, причем, по меньшей мере, один проходящий радиально элемент, который соединяет внешнюю часть с центральной частью, функционально соединен с рулевой колонкой машины. По меньшей мере, для машины, которая должна соблюдать правила дорожного движения, рулевая колонка может механически оперативно соединяться с рулевой структурой, сцепляющейся с почвой. Например, рулевая колонка может проходить к рулевой коробке, которая через непосредственную механическую передачу, обычно с помощью приводов, осуществляет управления колесами сцепляющейся с почвой структуры при вращении рулевого колеса. Предпочтительно, рулевая колонка проходит в рулевой структуре, которая содержит гидравлический клапан, подающий находящуюся под давлением гидравлическую жидкость к одному или нескольким гидравлическим механизмам, чтобы осуществлять управление.
В каждом случае вращение рулевого колеса вызывает вращение рулевой колонки. Тогда как центральная часть рулевого колеса может быть механически закрепленной с рулевой колонкой, желательно рулевое устройство содержит планетарную передачу, закрепленную с рулевой колонкой, и центральная часть рулевого колеса включает зубчатый венец, который при вращении поворачивает планетарную передачу и поэтому также рулевую колонку путем вращения одной или нескольких сателлитов, имеющихся между планетарной передачей и зубчатыми венцами сцепленными с ними. Таким образом, рулевая колонка будет вращаться в направлении, противоположном тому, в котором вращается рулевое колесо вокруг своей оси вращения, и с относительной скоростью вращения, пригодной для ввода в гидравлический клапан, где он есть, в зависимости от соотношения зубчатого венца, планетарной передачи и сателлитов.
В случае машины, имеющей задние сцепляющиеся с грунтом колеса, которыми можно управлять, чтобы управлять машиной, их нужно будет развернуть в направлении, противоположном направлению вращения рулевого колеса, чтобы управлять, когда машина движется вперед и, таким образом, с описанным приспособлением рулевую колонку можно механически соединить напрямую с управляемыми задними сцепляющимися с грунтом колесами или с подходящим образом конфигурированным гидравлическим клапаном, но в случае машины, имеющей передние сцепляющиеся с грунтом колеса, которыми управляют, они должны поворачиваться в том же направлении, что и направление вращения рулевого колеса для управления, что можно выполнить пригодной конфигурацией гидравлических схем машины. В случае машины, у которой передние и задние сцепляющиеся с грунтом колеса могут поворачиваться для управления, опять же гидравлические схемы машины должны иметь соответствующую конфигурацию.
В предпочтительной конструкции структура ступицы включает вспомогательную внешнюю часть, которая расположена в принципе вдоль проходящего по периферии обода рулевого колеса, и вспомогательную внутреннюю часть, которая прикреплена к раме управляющего устройства, причем центральная часть рулевого колеса находится между расположенными по оси внутренней и внешней частями ступицы. Расположенная по оси внешняя часть ступицы может иметь такую конфигурацию, что одно или несколько управляющих устройств на осевой внешней части ступицы близко примыкают к проходящему по периферии вращающейся внешней части ободу рулевого колеса.
Желательно рулевое колесо содержит сцепляемый вручную спинер, который можно использовать для вращения рулевого колеса как альтернативу для оператора, держащего и поворачивающего внешний обод рулевого колеса, причем спинер включает захватываемую вручную часть, которая может вращаться относительно рулевого колеса вокруг оси спинера параллельно оси вращения рулевого колеса, но отдаленно от нее.
Спинер может содержать, по меньшей мере, одно установленное на него устройство, управляемое оператором. Для избежания выполнения электрических соединений между установленным на спинере управляемым оператором устройством и любой дистанционной управляемой службой желательно чтобы спинер включал беспроволочную функцию передачи для передачи сигналов в контроллер, при приведении в действие работающего вручную вспомогательного устройства контроля службы, причем дистанционной услугой можно управлять без электрического соединения с устройством или устройствами управления оператора, установленными на спинере.
Желательно спинер можно снимать с остальной части рулевого колеса, например, чтобы позволить спинеру соединяться с электрическим зарядным устройством, причем батарею спинера можно перезарядить. Желательно рулевое колесо дает дополнительные установочные положения для спинера, например, так что рулевое колесо можно снова сконфигурировать для работы спинера от правой или левой руки.
При желании работающее вручную управляющее устройство или устройства, предоставленные ступицей при вводе в действие, дают сигнал в контроллер через беспроводную функцию передачи для управления соответствующим гидравлическим и исполнительным механизмами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описаны со ссылкой на сопроводительные чертежи, на которых:
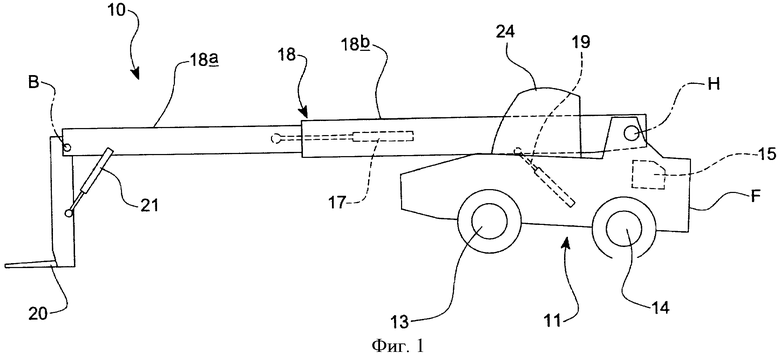
Фиг.1 представляет собой иллюстративный вид рабочей машины в соответствии с данным изобретением.
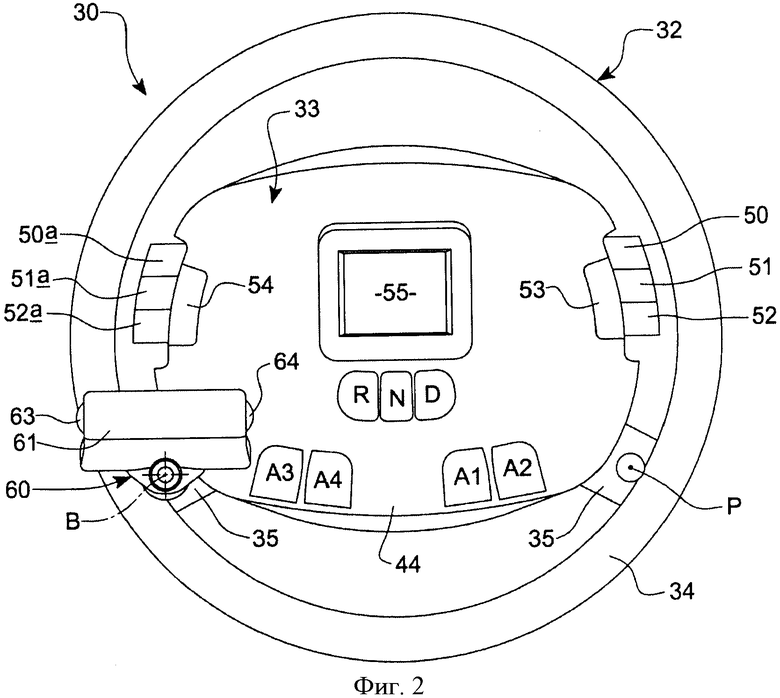
Фиг.2 - это иллюстративный вид в плане управляющего устройства машины Фиг.1.
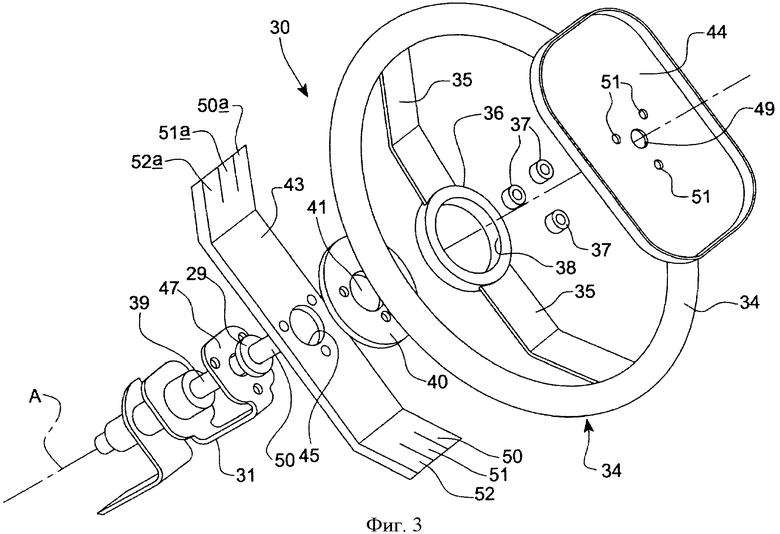
Фиг.3 - это иллюстративное трехмерное изображение в перспективе части управляющего устройства Фиг.2.
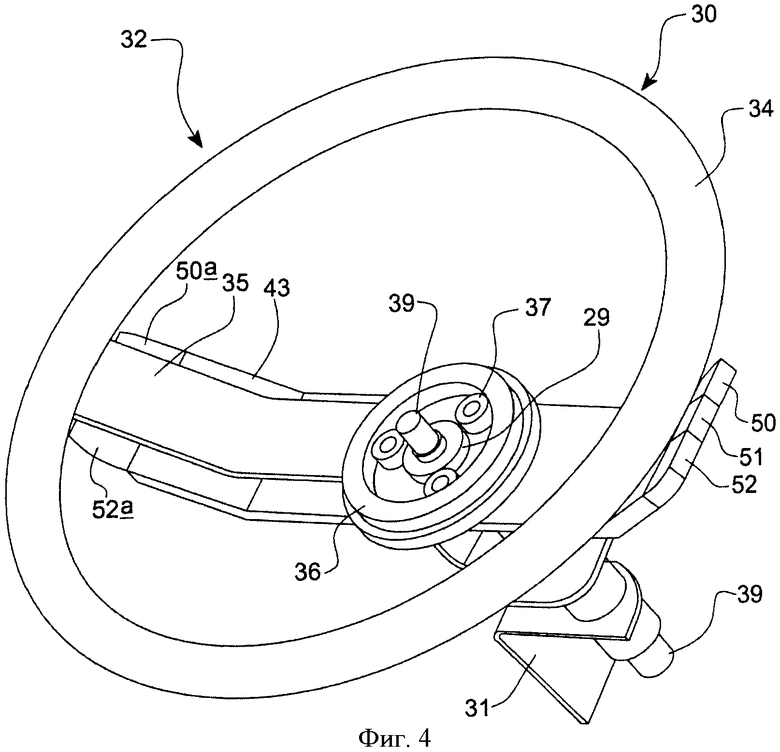
Фиг.4 - это иллюстративный вид в перспективе и в частичной сборке части управляющего устройства Фиг.3.
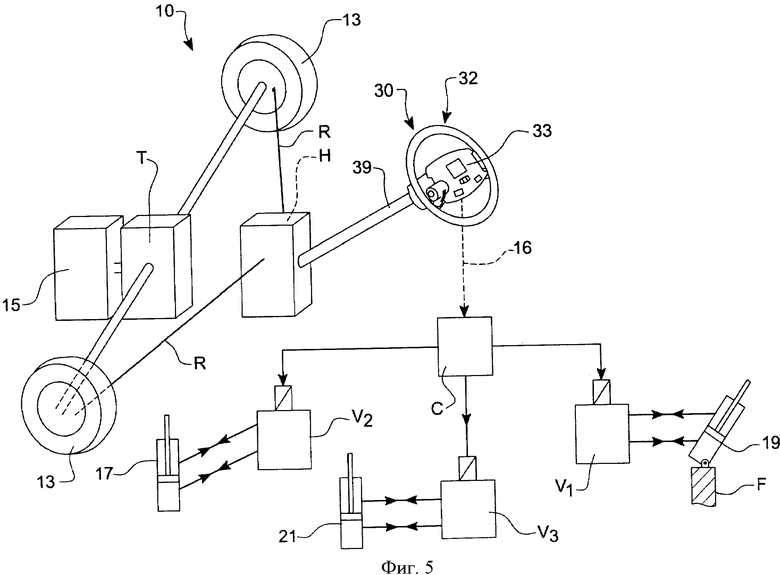
Фиг.5 - это иллюстративный вид управляющего устройства Фиг.2-4, контроллера и гидравлических управляющих клапанов.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На Фиг.1-5 чертежей машина 10, на которую направлено это изобретение, показана в этом примере, причем погрузочная машина имеет сцепляющуюся с грунтом структуру 11, образованную двумя парами сцепляющихся с грунтом колес 13, 14, одну пару колес 13 в этом примере, которые являются передними управляемыми колесами, и другой парой колес, являющихся задними колесами (которые могут или не могут быть альтернативно или дополнительно передними колесами, которыми нужно управлять), причем все четыре колеса 13, 14 приводятся в действие от двигателя 15 через пригодную трансмиссию Т, которая может быть механической или гидростатической трансмиссией.
Машина 10 содержит рабочее плечо, которое в этом примере является погрузочным плечом 18, установленным с возможностью вращения вокруг оси (шарнирно) на корпусе F машины 10 для вращающего момента вокруг в основном горизонтальной оси Н. Такое погрузочное плечо 18 обычно включает множество телескопических частей или ступеней, например две ступени 18а, 18b в этом примере, причем плечо 18 может проходить линейно и убираться посредством одного или нескольких, например, внутренних или внешних гидравлических исполнительных механизмов 17, причем плечо можно поднимать и опускать посредством одного или нескольких подъемных гидравлических исполнительных механизмов 19. Погрузочные вилы 20 или другой рабочий инструмент имеется у внешнего конца погрузочного плеча 18, и им можно манипулировать вокруг оси вращения В посредством другого одного или нескольких гидравлических исполнительных механизмов 21 для наполнения и сваливания.
Машина 10 приводится в действие, управляется, и выполняет различные вспомогательные службы, т.е. гидравлический исполнительный механизм(ы) 17 внутри погрузочного плеча 18 и гидравлических исполнительных механизмов 19, 21 и т.д. управляются из кабины оператора.
Как видно из Фиг.3 и 4, управляющее устройство 30 содержит рулевое устройство, которое включает рулевое колесо 32 и множество приводимых в действие вручную управляющих устройств, имеющихся на структуре ступицы 33, установленных посредством рамы 31, которая фиксирована относительно корпуса F машины 10.
Рулевое колесо 32 включает бесконечный обод 34, который в этом примере является в принципе круглым и который соединен посредством одного или множества проходящих радиально элементов 35 с центральной частью 36.
Рулевое колесо 32 может вращаться оператором вокруг оси А, что приводит к повороту рулевой колонки 39 машины 10. В этом примере рулевая колонка 39 проходит к гидравлическому управляющему клапану Н, который работает для подачи находящейся под давлением гидравлической жидкости через подходящую гидравлическую схему к одному или нескольким рулевым исполнительным механизмам (не показаны), которые действуют для поворота передних колес 13, чтобы управлять машиной 10 через рулевые тяги R.
Рулевое колесо 32 функционально соединено с рулевой колонкой 39 следующим образом.
Рулевая колонка 39 смонтирована рамой 31 управляющего устройства, чтобы вращаться относительно него, и колонка 39 проходит по оси внутрь центральной части 36 рулевого колеса 32. Планетарная передача 29 рулевого устройства соединена с рулевой колонкой 39, и сцеплена с каждой из множества, в данном примере тремя, сателлитами 37, которые также сцеплены с внутренним зубчатым венцом 38, созданным центральной частью 36. Сателлиты 37 установлены на пластине 40, которая имеет центральное отверстие 41, достаточно большое, чтобы через него проходила планетарная передача 29, причем пластина 40 закреплена, как описано ниже, на раме 31.
В силу сцепленных планетарной передачей 29, сателлита 37 и зубчатых венцов 38 можно понять, что когда рулевое колесо 32 вращается вокруг своей оси А, рулевая колонка 39 будет поворачиваться вокруг оси А в противоположном направлении и возможно с дифференциальной скоростью вращения от скорости поворота внешнего обода 34 рулевого колеса 32 в зависимости от отношений передач. Гидравлическая схема рулевого гидравлического клапана Н таким образом должна иметь такую конфигурацию, чтобы в этом примере передние колеса 13 машины 10 поворачивались в том же направлении, в котором рулевое колесо 32 вращается вокруг своей оси А.
Структура ступицы 33 управляющего устройства 30 содержит расположенную по оси внутреннюю часть, показанную под позицией 43, и осевую внешнюю часть, показанную под позицией 44. Внешний обод 34 рулевого колеса 32 при вращении определяет границу вращения. Ступица 33 полностью содержится или, по меньшей мере, в принципе полностью содержится внутри границы вращения обода 34.
Осевая внутренняя часть 43 проходит радиально относительно рулевой оси А, причем отверстие 45 достаточно большое для прохода через него планетарной передачи 29. Осевая внутренняя часть 43 находится по оси вовне или примыкая к поперечно проходящей принимающей части 47 рамы 31. Пластина 40, на которую установлены сателлиты 37, расположена по оси вовне или примыкая к расположенной по оси внутренней части ступицы 43. Центральная часть 36 и зубчатый венец 38 находятся по оси вовне и примыкая к пластине 40, на которой установлены сателлиты 37, а осевая внешняя часть 44 ступицы находится по оси вовне и примыкая к центральной части 36 рулевого колеса 32.
Расположенная по оси внешняя часть 44 ступицы 33 имеет отверстие 49 для размещения конца рулевой колонки 39 и три радиальных внешних отверстия 51 для размещения крепежных деталей (не видны). Крепежные детали проходят сквозь и закрепляют осевую внешнюю часть 44 ступицы, через центральную часть 36 рулевого колеса 32, через сателлиты 37, устанавливая их через отверстия в пластине 40 и отверстия в осевой части 43 ступицы к принимающей части 47 рамы 31, где крепежные детали закрепляются. Рулевое колесо 32 таким образом может вращаться вокруг своей рулевой оси А, причем пригодные подшипники имеются между центральной частью 36 и каждой из пластин 40, на которой установлены сателлиты 37, и между осевой внешней частью 44 ступицы и центральной частью 36 рулевого колеса 32.
На Фиг.4 показано собранное управляющее устройство 30, но для ясности осевая внешняя часть 44 ступицы отсутствует.
Как конкретно видно на Фиг.2, ступица 33 несет на себе различные управляемые вручную управляющие устройства, которые теперь будут описаны. Нужно понимать, что конфигурация осевой внешней части 44 ступицы, показанная на Фиг.3, чисто иллюстративна. Фиг.2 показывает внешнюю часть 44 ступицы, как она может выглядеть на практике.
Структура ступицы 33 будучи фиксированно закреплена, как описано выше, на раме 31, не будет вращаться при вращении рулевого колеса 32, но различные ручные управляющие устройства для гидравлических исполнительных механизмов и других вспомогательных служб или, по меньшей мере, тех, которые могут потребоваться для работы, когда машина 10 находится в движении и управляется, доступны для руки или пальцев оператора без необходимости для оператора снимать любую из рук с внешнего обода 34 рулевого колеса 32.
В этом примере осевая внутренняя часть 43 ступицы несет на себе три двунаправленных ручных управляющих устройства 50, 51, 52, примыкающих к внешнему ободу 34 рулевого колеса 32, так что оператор может одновременно управлять управляющими устройствами 59, 51, 52 и вести машину. Управляющие устройства 50, 51 и 52 могут иметь конфигурацию для управления и работы гидравлических исполнительных механизмов 17, 19, 21 и т.д. погрузочного плеча 18 и рабочего инструмента 20.
Так, управляющие устройства 50, 51, 52 могут иметь такую конфигурацию, что нажатие на устройство 50, например, заставляет плечо 18 опускаться, и вытягивание (прекращение нажатия) устройства 50 заставляет плечо 18 подниматься посредством соответствующей работы подъемного исполнительного механизма 19 и так что нажатие на на управляющее устройство 51 заставляет погрузочное плечо 18 убираться посредством работы внутреннего исполнительного механизма (механизмов) 17, и нажатие на управляющее устройство 52 заставляет рабочий инструмент 20 нагружаться, тогда как вытягивание (прекращение нажатия) устройства 52 заставляет рабочий инструмент опорожняться посредством соответствующей работы исполнительного механизма 21.
Управляющие устройства 50, 51, 52 электрически соединены электрическими кабелями 16 (см. фиг.5) с контроллером С машины, который, в свою очередь, электрически соединен с соответствующими электрическими гидравлическими управляющими клапанами V1, V2, V3 для осуществления описанных функций погрузочного плеча 18/рабочего инструмента 20.
Конечно, конфигурации управляющих устройств 50, 51, 52, т.е. управляющего устройства, которое приводит в действие гидравлический исполнительный механизм 17, 19, 21, весьма примерные, и в силу электрической системы и контроллера С машины при желании можно организовать альтернативные конфигурации для достижения работы разных исполнительных механизмов 17, 19, 21 другими ручными управляющими устройствами 50, 51, 52 путем новой конфигурации управляющих устройств.
Структура ступицы 33 в этом примере, кроме того, включает в себя радиально внешнюю часть 44, три дополнительных управляющих устройства, которые в этом примере являются кнопочными переключателями «D» для выбора переднего привода, «N» для выбора нейтрального привода и «R» для выбора реверсивного привода. Эти переключатели D, R и N электрически соединены с контроллером С машины 10 для управления другими вспомогательными службами, а именно контроллером механической трансмиссии или гидравлических клапанов гидростатической передачи, для управления машиной 10, которую нужно привести в действие вперед или назад путем работы соответствующего переключателя D или R (обычно в сочетании и ножной педалью управления), или трансмиссия может устанавливаться в нейтральное положение выбором переключателя N.
Эти дополнительные управляющие устройства D, R, N могут потребовать для работы от оператора убрать руку с внешнего обода 34 рулевого колеса 32, но поскольку изменение режима привода желательно выбирается только когда машина 10 стационарна, одновременного управления не требуется.
Осевая внешняя часть 44 ступицы также имеет другие дополнительные управляемые вручную функциональные устройства, представляющие собой пару селекторных кнопочных переключателей А1 и А2, которые могут быть выполнены так, чтобы позволить выбрать альтернативные вспомогательные функции для управления управляющими устройствами 50, 51, 52, которые находятся на радиально внутренней части 43 ступицы, и далее пару селекторных кнопочных переключателей A3, А4, которые могут быть выполнены для приведения в действие вспомогательных служб, таких как функция быстрого вождения, например, чтобы повернуть передние управляемые колеса 13 на четверть поворота в одном или другом направлении.
Показано, что на осевой внешней части 43 ступицы установлены три альтернативных управляющих устройства 50а, 51а и 52а, которые могут быть выполнены подобно устройствам 50, 51, 52, уже описанным для приведения в действие и управления погрузочным плечом 18 и рабочим инструментом 20, альтернативно или дополнительно к управляющим устройствам 50, 51, 52, например, для использования оператором машины - левшой.
На фиг.2 можно видеть, что осевая внешняя часть 44 ступицы также размещает на себе дополнительные управляющие устройства 53, 54, смежные с соответствующими управляющими устройствами 50, 51, 52 и альтернативные управляющим устройствам 50а, 51а, 52а, каковые дополнительные управляющие устройства 53, 54 можно использовать для управления другими характеристиками одной или нескольких описанных вспомогательных служб, таких как, например, скорость течения находящейся под давлением жидкости, используемой для выполнения этой или одной из вспомогательных служб.
Осевая внешняя часть 44 ступицы содержит экран дисплея 55, который отображает информацию, относящуюся к рабочим функциям машины 10. Например, экран дисплея 55 может быть выполнен для отображения информации, относящейся к функциям двигателя 15 машины, таким как скорость машины, состояние давления масла и т.д., или экран 55 дисплея может быть выполнен для отображения информации, относящейся к статусу привода, или к функциям вспомогательных служб машины 10.
То, что отображается, может выбираться оператором при работе с органами управления экраном дисплея (не показаны), или экран 55 может быть чувствительным к прикасанию, чтобы позволить отобразить выбранную информацию.
Предусматривается, что экран 55 дисплея можно использовать для образования различных управляющих устройств 50, 51, 52 и альтернативных управляющих устройств 50а, 51а, 52а, дополнительных управляющих устройств, т.е. кнопки переключателя D, R, N и дополнительных управляющих устройств 53, 54, а также кнопок выбора А1, А2, A3, А4 для работы/управления разными функциями машины, например, когда экран 55 дисплея отображает меню выбора.
В каждом случае нужно понимать, что поскольку структура 33 ступицы фиксирована относительно рамы 31 и, следовательно, корпуса машины 10, то обеспечение электрических соединений с различными управляющими устройствами 50, 51, 52 или 50а, 51 а, 52а, дополнительными управляющими устройствами D, R, N, дополнительными управляющими устройствами 53, 54 и селекторными переключателями А1, А2 и с экраном 55 дисплея не требует соединений с электрической системой машины 10 через вращаемое рулевое колесо 32.
На фиг.2 можно видеть, что рулевое колесо 32 снабжено спинером 60, так что оператор машины может поворачивать рулевое колесо 32 одной рукой. Спинер 60 включает захватываемую рукой часть 61, которая может вращаться относительно остальной части рулевого колеса 32 вокруг оси В спинера, которая параллельна оси А рулевого колеса, но отстоит от него. Спинер 60 показан сцепленным с радиально проходящим элементом 35 рулевого колеса в положении, наиболее пригодным для работы водителя-правши. Однако рулевое колесо 32 может иметь альтернативное положение Р установки спинера 60 при желании, так что спинер 60 может быть выборочно сцеплен с рулевым колесом 32 в другом положении, более пригодном для оператора машины левши.
Спинер 60 содержит пару ручных управляющих устройств спинера, таких как кнопочные переключатели 63, 64, которые могут быть выполнены для управления любыми желательными вспомогательными службами, такими как в этом примере прямое и обратное направление вождения, так что оператор может выбрать направление вождения с использование спинера 60 для управления.
Предпочтительно, чтобы избежать создания любых электрических соединений из вращающегося спинера 60 через вращающееся рулевое колесо 32 к, например, электрической системе машины 10, спинер 60 включает в себя беспроводную функцию передачи, причем дистанционный гидравлический исполнительный механизм или другая вспомогательная служба (которая может быть гидравлической или электрической службой) может управляться без электрического соединения с управляющими органами 63, 64 спинера. Это достигается приведением в действие управляющих устройств 63, 64 спинера, что приводит к тому, что соответствующие сигналы передаются в контроллер С, который таким образом содержит приемник для беспроводных сигналов.
Если желательно избежать необходимость в электрических кабелях между структурой 33 ступицы и контроллером С, по меньшей мере, если не все кабели 16 можно заменить функцией беспроводной передачи, так что работа каждого или любого из ручных управляющих устройств, которыми снабжена ступица 33, приводит к тому, что соответствующие сигналы выдаются в контроллер С, который реагирует срабатыванием соответствующего гидравлического управляющего клапана V1, V2, V3 и в результате гидравлического исполнительного механизма или другого, например, приводимого в действие электрической службой.
Спинер 60 может включать в себя батарею для питания при реализации функции беспроводной передачи, и эту батарею можно перезаряжать или заменять, когда спинер 60 отсоединяется от рулевого колеса 32. Если ступица 33 реализует функцию беспроводной передачи, ступица 33 может включать батарею, или же электропитание можно осуществлять через кабели.
Нужно понимать, что примеры, приведенные касательно характера машины 10, в которых можно использовать настоящее изобретение, расположение органов управления, которые можно конфигурировать, и т.д. и механическое соединение между рулевым колесом 32 и рулевой колонкой 39 являются чисто иллюстративными и возможны другие конфигурации.
В описанных примерах рулевая колонка 39 соединяется с управляемой сцепляющейся с грунтом структурой 11 через гидравлический рулевой клапан Н, но в другом расположении может иметься рулевая коробка, посредством которой рулевая колонка 39 механически напрямую соединяется с колесами 13 или/и 14, при необходимости с помощью требуемого усилителя. Это сделало бы машину совместимой с требованиями, применимыми для машин и транспортных средств, которые нужно водить по общественным дорогам. Для чисто внедорожной машины или на территориях, где такие дорожные требования не применяются, рулевая колонка 39 может управлять работой электрической рулевой системы.
Изобретение относится к машиностроению. Рабочая машина включает в себя управляемую, приводную сцепляющуюся с грунтом структуру и рабочую часть, работающую от гидравлического исполнительного механизма, для выполнения рабочих операций и управляющее устройство. Управляющее устройство включает в себя раму, рулевое устройство для обеспечения управления сцепляющейся с почвой структуры, и ручное управляющее устройство для управления работой гидравлического управляющего клапана. Управляющий клапан при работе выборочно подает находящуюся под давлением гидравлическую жидкость к исполнительному механизму для работы рабочей части. Рулевое устройство содержит рулевое колесо, которое содержит внешнюю огибающую часть обода, которая вращается относительно рамы вокруг оси для поворота рулевой колонки, которая соосна оси вращения рулевого колеса. Рулевая колонка функционально соединена со сцепляющейся с грунтом структурой для осуществления управления машиной при повороте. Управляющее устройство включает в себя ступицу, которая размещается внутри границы вращения внешней части обода рулевого колеса, и контроллер. Структура ступицы фиксирована относительно рамы. Ручное управляющее устройство размещено на ступице и при работе подает сигнал контроллеру, который реагирует, приводя в действие гидравлический управляющий клапан. Достигается упрощение конструкции устройства. 11 з.п. ф-лы, 5 ил.
1. Рабочая машина, которая включает в себя управляемую, приводную сцепляющуюся с грунтом структуру и рабочую часть, работающую от гидравлического исполнительного механизма, для выполнения рабочих операций и управляющее устройство, включающее в себя раму, рулевое устройство для обеспечения управления сцепляющейся с почвой структуры, и ручное управляющее устройство для управления работой гидравлического управляющего клапана, который при работе выборочно подает находящуюся под давлением гидравлическую жидкость к, по меньшей мере, одному исполнительному механизму для работы рабочей части, причем рулевое устройство содержит рулевое колесо, которое содержит внешнюю огибающую часть обода, которая вращается относительно рамы вокруг оси для поворота рулевой колонки, которая соосна оси вращения рулевого колеса, причем рулевая колонка функционально соединена со сцепляющейся с грунтом структурой для осуществления управления машиной при повороте, и управляющее устройство далее включает в себя ступицу, которая размещается внутри границы вращения внешней части обода рулевого колеса, и контроллер, причем структура ступицы фиксирована относительно рамы, и ручное управляющее устройство, размещенное на ступице, при работе подает сигнал контроллеру, который реагирует, приводя в действие гидравлический управляющий клапан.
2. Машина по п.1, в которой структура ступицы включает в себя дисплей для отображения рабочего статуса функции машины, причем оператор может выбрать информацию, отображенную на дисплее.
3. Машина по п.1, в которой рабочая часть машины включает в себя рабочее плечо, установленное, с возможностью вращения вокруг оси, у внутреннего конца на корпус машины для перемещения относительно корпуса посредством гидравлического исполнительного механизма, и рабочее плечо содержит множество относительно подвижных частей, которые относительно подвижны посредством одного или нескольких дополнительных исполнительных механизмов, и машина содержит рабочий инструмент, смонтированный у внешнего конца рабочего плеча и подвижный относительно рабочего плеча посредством одного или нескольких дополнительных гидравлических исполнительных механизмов, причем один из гидравлических исполнительных механизмов является, по меньшей мере, одним исполнительным механизмом, управляемым ручным управляющим устройством, размещенным на ступице устройства управления.
4. Машина по п.3, в которой структура ступицы содержит множество ручных управляющих устройств, каждое из которых может работать при приведении его в действие для выдачи сигнала контроллеру, который реагирует путем запуска соответствующего гидравлического управляющего клапана, который затем подает находящуюся под давлением гидравлическую жидкость в соответствующий гидравлический исполнительный механизм рабочего плеча и рабочего инструмента, причем конфигурацию функций множества ручных управляющих устройств можно менять для управления альтернативными исполнительными механизмами.
5. Машина по п.1, в которой ручное управляющее устройство или каждое из них, имеющееся в структуре ступицы, может работать от пальцев или/и руки оператора, когда оператор держит внешнюю часть обода рулевого колеса, и ступица содержит дополнительные управляющие устройства, для работы с которыми от оператора требуется освободить внешнюю часть рулевого колеса.
6. Машина по п.1, в которой рулевое колесо включает в себя одну непрерывную внешнюю часть обода, которая является круглой и, по меньшей мере, один проходящий радиально элемент, который соединяет внешнюю часть с центральной частью, которая функционально соединена с рулевой колонкой машины, и рулевая колонка функционально механически соединена с рулевым исполнительным механизмом и проходит к гидравлическому клапану, который подает находящуюся под давлением гидравлическую жидкость к одному или нескольким гидравлическим исполнительным механизмам для осуществления управления.
7. Машина по п.1, в которой рулевое устройство включает в себя планетарную передачу, закрепленную с рулевой колонкой, и центральная часть рулевого колеса включает в себя зубчатый венец, который при вращении поворачивает планетарную передачу и поэтому рулевую колонку путем вращения одного или нескольких сателлитов, которые имеются между и сцеплены с планетарной передачей и зубчатыми венцами.
8. Машина по п.1, в которой структура ступицы содержит расположенную по оси внешнюю часть, которая размещена вдоль проходящей по периферии внешней части обода рулевого колеса, и расположенную по оси внутреннюю часть, которая прикреплена к раме управляющего устройства, причем центральная часть рулевого колеса находится между осевыми внутренней и внешней частями ступицы, и осевая внутренняя часть ступицы выполнена так, что одно или несколько управляющих устройств, имеющихся на осевой внутренней части ступицы, близко примыкают к проходящей по периферии вращающейся внешней части обода рулевого колеса.
9. Машина по п.1, в которой рулевое колесо содержит зацепляемый вручную спинер, который можно использовать для вращения рулевого колеса в виде альтернативы для оператора, держащего и вращающего внешнюю часть обода рулевого колеса, причем спинер включает в себя захватываемую рукой часть, которая может вращаться относительно рулевого колеса вокруг оси спинера параллельно оси вращения рулевого колеса, но на расстоянии от нее.
10. Машина по п.9, в которой спинер содержит, по меньшей мере, одно ручное управляющее устройство для вспомогательных служб, установленное на спинере, для управления дистанционной функцией.
11. Машина по п.10, в которой спинер можно снимать с остальной части рулевого колеса, а рулевое колесо имеет альтернативное установочное положение для спинера.
12. Машина по п.10, в которой спинер содержит функцию беспроводной передачи для передачи сигналов в контроллер при приведении в действие ручного управляющего устройства для вспомогательной службы, при этом дистанционной службой можно управлять без электрического соединения с управляющим устройством или устройствами оператора, смонтированными на спинере.
| Способ определения количества алюминия в электролизере | 1989 |
|
SU1686039A1 |
| US 4776750 А, 11.10.1988 | |||
| DE 102004040975 А1, 02.03.2006 | |||
| US 2003067147 А1, 10.04.2003 | |||
| Устройство для регистрации дугового пробоя и предпробойный состояний | 1983 |
|
SU1256542A1 |
| US 2006089773 А1, 27.04.2006 | |||
| US 5046312 A, 10.09.1991 | |||
| Рулевая колонка транспортного средства | 1987 |
|
SU1463610A1 |
| БИБЯИОТРГ-ГД | 0 |
|
SU351979A1 |

