Изобретение относится к шпалоподбивочной машине согласно признакам, приведенным в ограничительной части п.1 формулы, а также к устройству.
Подобные шпалоподбивочные машины, непрерывно движущиеся при выполнении работ, известны, например из патента US 4632037. При этом особое преимущество заключается в том, что рама машины, имеющая значительно большую массу, не должна останавливаться у каждой подбиваемой шпалы, а затем сразу снова разгоняться. Постепенное продвижение вперед ограничивается рамой, на которой установлены рабочие агрегаты и которая связана с рамой машины и выполнена с возможностью перемещения относительно ее. Перемещение происходит, во-первых, благодаря приводу движения, установленному в ходовом механизме рамы для агрегатов, а во-вторых благодаря гидравлическому цилиндру, соединяющему между собой раму машины и раму для агрегатов.
Задачей предложенного изобретения является создание машины указанного типа, с помощью которой можно достигнуть лучшего разгона рамы для агрегатов.
Согласно изобретению эта задача решается при помощи машины указанного типа благодаря признакам, приведенным в отличительной части п.1 формулы изобретения.
Выполненный таким образом привод с ускорением действует в некотором роде как датчик импульсов для оптимальной поддержки и ускорения при трогании с места рамы для агрегатов. После начального ускорения оптимальным образом происходит дальнейшее продвижение вперед исключительно с помощью привода движения, установленного в ходовом механизме рамы для агрегатов.
Прочие выгоды и формы выполнения изобретения даны в других пунктах формулы и представлены на чертежах.
Изобретение описывается ниже более подробно при помяли примеров выполнения, представленных на чертежах.
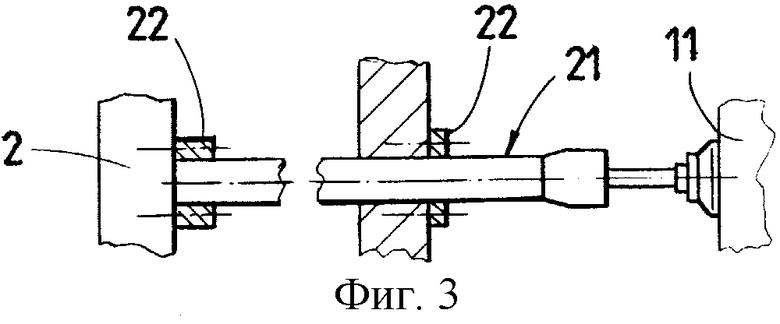
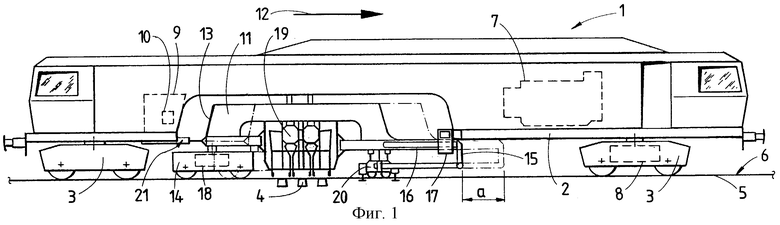
Фиг.1 - упрощенный вид сбоку шпалоподбивочной машины, Фиг.2 и 3 - увеличенный вид сверху на фрагмент рамы машины и рамы для агрегатов, Фиг.4 - другая форма выполнения (схематичный вид сверху).
Шпалоподбивочная машина 1, представленная на фиг.1, имеет собственную раму 2, выполненную с возможностью передвижения по рельсовому пути 6, состоящему из шпал 4 и рельсов 5, при помощи двух ходовых механизмов 3, расположенных на ее концах. Для этого машина оснащена двигателем 7 и приводом движения 8. В рабочей кабине 9 находится устройство управления 10.
Между обоими ходовыми механизмами 3 рамы машины 2 расположена рама для агрегатов 11, которая имеет на заднем - если смотреть в рабочем направлении или продольном направлении машины 12 - конце 13 ходовой механизм 14. На переднем конце 15 предусмотрены две опоры рамы 16, разнесенные между собой в поперечном направлении машины и установленные в креплении для рамы 17 с возможностью сдвига в продольном направлении. Непосредственно перед ходовым механизмом 14, имеющим собственный привод движения агрегатов 18, предусмотрен шпалоподбивочный агрегат 19, который предназначен для одновременной подбивки трех шпал 4. Перед шпалоподбивочным агрегатом 19 установлен путеподъемный агрегат 20, оба агрегата 19, 20 соединены с рамой для агрегатов 11 с возможностью перемещения по высоте.
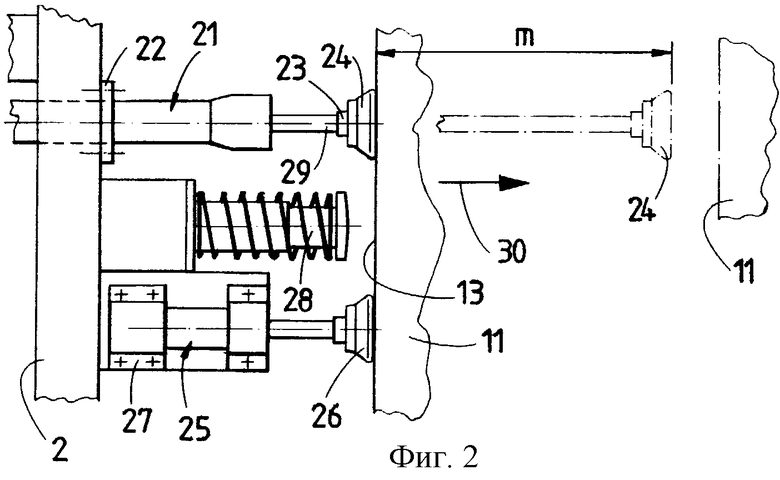
Как видно на фиг.1 и 2, между задним концом 13 рамы для агрегатов 11 и рамой машины 2 предусмотрен привод с ускорением 21, выполненный в виде гидравлического цилиндра и соединенный жестко только с рамой машины 2 при помощи крепления для привода 22. На свободном конце поршня 23 привода с ускорением 21 предусмотрен упорный элемент 24 для временного прилегания к раме для агрегатов 11. Максимальная длина хода m привода с ускорением 21 составляет 800 мм и она меньше, чем максимальный путь сдвига а между рамой машины и рамой для агрегатов 2, 11.
Для дополнительного поддержания ускорения при трогании с места рамы для агрегатов 11 предусмотрен второй привод с ускорением 25 с упорным элементом 26, причем привод с ускорением 25 соединен с рамой машины 2 при помощи крепления для привода 27. Максимальная длина хода этого второго привода с ускорением 25 составляет лишь 120 мм. Между обоими приводами с ускорением 21, 25 находится пружинный буфер 28, соединенный с рамой машины 2.
Когда рама машины 2 непрерывно продвигается при работе в рабочем направлении 12, движение рамы для агрегатов 11 - относительно рамы машины 2 - складывается из быстрого разгона вперед и стояния на месте во время подбивки шпал. Разгон вперед происходит из заднего конечного положения (на фиг.1 и 2 обозначено сплошной линией) к переднему конечному положению (обозначено штрихпунктирной линией). Для поддержки привода движения агрегатов 18 при разгоне приводят в действие оба привода с ускорением 21, 25. Они двигают раму для агрегатов 11 в направлении переднего конечного положения (обозначено стрелкой 30), после чего по достижении соответствующей максимальной длины хода упорные элементы 24, 26 автоматически отходят от рамы для агрегатов 11. Она затем движется дальше при помощи привода движения агрегатов 18, пока не займет переднее конечное положение (обозначено штрихпунктирной линией на фиг.1).
Благодаря тому, что рама для агрегатов 11 во время подбивки шпал стоит на месте, происходит постепенное прилегание упорного элемента 24, находящегося в переднем конечном положении, к раме для агрегатов 11, которая затем двигает назад в исходное положение поршневой шток 29, находящийся в плавающем положении и не испытывающий на себе давления и соединенный с упорным элементом 24. Аналогичным образом движется назад и второй упорный элемент 26. Как только рама для агрегатов 11 достигнет заднего конечного положения, она начинает свой новый цикл перемещения благодаря приведению в действие обоих приводов с ускорением 21, 25 и привода движения агрегатов 18.
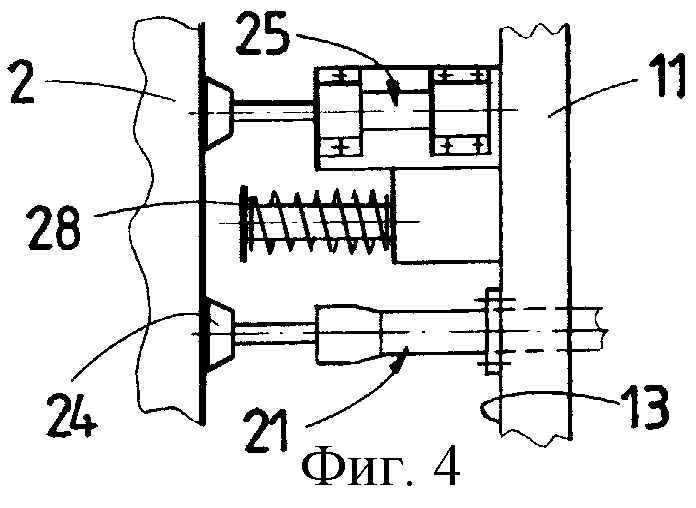
На фиг.4 схематично представлена еще одна форма выполнения изобретения, при которой приводы с ускорением 21, 25 укреплены на раме для агрегатов 11, а упорные элементы 24 упираются в раму машины 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2010 |
|
RU2437977C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА С СОБСТВЕННОЙ РАМОЙ И РАМОЙ ДЛЯ АГРЕГАТОВ | 2003 |
|
RU2241088C1 |
| СПОСОБ И МАШИНА ДЛЯ ПОДБИВКИ ШПАЛ РЕЛЬСОВОГО ПУТИ | 2001 |
|
RU2225908C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2001 |
|
RU2195523C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2001 |
|
RU2228985C2 |
| МАШИНА И СПОСОБ ДЛЯ ПОДБИВКИ ШПАЛ РЕЛЬСОВОГО ПУТИ | 2003 |
|
RU2249644C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА, КОМПОНОВКА МАШИН И СПОСОБ ПОДБИВКИ РЕЛЬСОВОГО ПУТИ | 1996 |
|
RU2124088C1 |
| СПОСОБ ПОДБИВКИ БОЛЬШОГО КОЛИЧЕСТВА ШПАЛ РЕЛЬСОВОГО ПУТИ | 1996 |
|
RU2114948C1 |
| Подвижная шпалоподбивочная нивелировочная и рихтовочная машина | 1983 |
|
SU1409135A3 |
| СПОСОБ ДЛЯ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1999 |
|
RU2187593C2 |
Изобретения относятся к шпалоподбивочной машине. Шпалоподбивочная машина (1) имеет собственную раму (2) и раму для агрегатов (11), расположенную между ходовыми колесами (3), выполненную с возможностью передвижения при помощи ходового механизма (14) с приводом движения агрегатов (18) и соединенную с рамой машины при помощи крепления для рамы (17) с возможностью перемещения в продольном направлении. Для поддержки привода движения агрегатов (18) предусмотрен привод с ускорением (21), жестко соединенный с рамой машины (2) или с рамой для агрегатов (11) при помощи крепления для привода и имеющий на конце поршня упорный элемент для временного прилегания к раме машины (2). Максимальная длина хода привода с ускорением (21) меньше, чем максимальный путь сдвига между рамой машины и рамой для агрегатов (2, 11). Способ для поддержания относительного перемещения между рамой машины (2) и рамой для агрегатов (11) заключается в совместном приведении в действие привода движения агрегатов (18) и привода с ускорением (21) для продвижения вперед упорного элемента вместе с рамой для агрегатов (11) из начального положения в конечное, разъединении упорного элемента с рамой для агрегатов (11) и ее дальнейшее движение при помощи привода движения агрегатов (18), переключении гидравлического привода (21) в плавающее положение, придвигании упорного элемента, движущегося вперед благодаря непрерывному движению дальше рамы машины (2), к раме для агрегатов (11), стоящей на месте для выполнения работ по подбивки шпал рельсового пути, и автоматическом возврате упорного элемента в исходное положение в результате перемещения рамы машины (2) относительно неподвижной рамы для агрегатов (11). Техническим результатом изобретения является создание машины, с помощью которой можно достигнуть лучшего разгона рамы для агрегатов. 3 н.п. ф-лы, 4 ил.
c) переключение гидравлического привода (21) в плавающее положение,
d) придвигание упорного элемента (24), движущегося вперед благодаря непрерывному движению дальше рамы машины (2), к раме для агрегатов (11), стоящей на месте для выполнения работ по подбивке шпал рельсового пути,
е) автоматический возврат упорного элемента (24) в исходное положение в результате перемещения рамы машины (2) относительно неподвижной рамы для агрегатов (11).
| US 4632037 А, 30.12.1986 | |||
| МАШИНА ДЛЯ УПЛОТНЕНИЯ БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1995 |
|
RU2088718C1 |
| US 4644868 A, 24.02.1987. | |||

