Изобретение относится к области радиолокации, в частности к радиолокационным станциям (РЛС) обнаружения наземных и низколетящих целей.
Основной особенностью таких РЛС является необходимость учета отражений от подстилающей поверхности.
Известны исследования [1-3], посвященные изучению влияния отражений от подстилающей поверхности при малых углах места цели. Одна часть публикаций [напр., 1, 2] посвящена построению и анализу моделей отражений от различного вида подстилающей поверхности для получения возможности их дальнейшего учета или компенсации при проектировании РЛС. Другая часть исследований [напр., 3] направлена на улучшение характеристик РЛС по измерению угла места с помощью оценки уровня отражений.
Недостатками данных аналогов являются, во-первых, отсутствие возможности учета влияния отражений от подстилающей поверхности на дальность действия РЛС и точность измерения азимутальной координаты, а во-вторых, модели, направленные на компенсацию отражений, не позволяют использовать энергию сигнала, переотраженного от земной поверхности, для улучшения характеристик РЛС.
Традиционно используется упрощенная модель в виде гладкой зеркально отражающей поверхности, с последующим расчетом коэффициента ослабления электромагнитного поля [например, 4, стр. 32]. Недостатком данной модели является то, что она не учитывает сложной структуры земной поверхности. В связи с этим более близкой к реальным условиям является фацетная модель [5, стр. 273]. Отражающая поверхность между РЛС и целью представляется в виде совокупности пластинок. В случае ориентации данных фацетов так, что падающий луч отражается в направлении на цель, эхо-сигнал от цели в совокупности с сигналом, переотраженным от земной поверхности, требует более сложной обработки.
Используя фацетную модель отражений электромагнитной волны от земной поверхности, следует учитывать область, существенную для отражения радиоволн [6, стр. 31].
Возбуждение совокупности фацетов вдоль линии визирования РЛС - цель энергетически наиболее эффективно в пределах первой зоны Френеля, радиусы которой определяются выражениями:

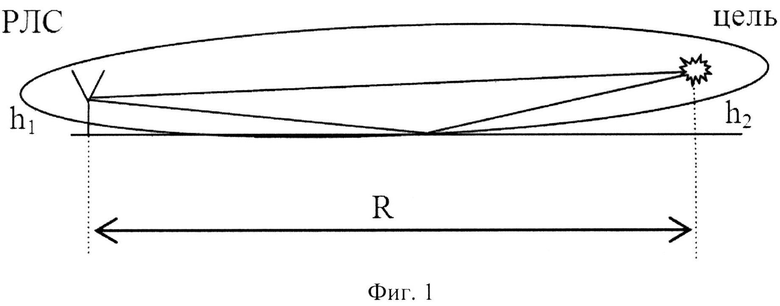
Поскольку разность хода различных сигналов в пределах зоны Френеля меньше длины волны, можно считать для всей зоны, что сумма расстояний R1+R2=const, где R1 и R2 - расстояния от антенны РЛС и цели до точки отражения на земле соответственно (фиг. 1).
Данное соотношение справедливо для эллипса, фокусами которого являются цель и РЛС. Нетрудно определить примерные радиусы данного эллипса, из геометрических соображений малый радиус b=(h1+h2)/2, большой радиус a=(R1+R2)/2, где h1 и h2 - высота подъема антенн РЛС, и цели над поверхностью земли.
Из выражений (1) следует, что при уменьшении высоты цели относительно земной поверхности и высоты подъема РЛС продольные размеры зоны, существенной для отражения радиоволн, приближаются к R. В результате, кроме реальной традиционно используемой апертуры антенны, получаем антенную решетку типа «волнового канала» - фоновую апертуру, состоящую из фацетов, которые излучают когерентный сигнал и, складываясь в пространстве, образуют дополнительную (фоновую) диаграмму направленности (ДН).
Размер апертуры определяется областью, существенной для отражений от подстилающей поверхности, которая представляет собой эллипс, соответствующий первой зоне Френеля. Для малых углов места цели, то есть когда b << a, поверхность данного эллипса стремится к плоской. При этом на значительных расстояниях и при малых углах места ДН антенны облучает всю поверхность, которую ввиду вышеизложенного можно считать когерентно переизлучающей на цель. Стоит учитывать статистический характер распределения неровностей земной поверхности, то есть вводить коэффициент рассеяния электромагнитной волны земной поверхностью.
В результате когерентно отражающие фацеты представляют собой фоновую апертуру антенны бегущей волны, реализующую режим осевого излучения, в основном лепестке ДН которой находится цель. Ширина главного лепестка ДН определяется как [7, стр. 180]:
где L - размер первой зоны Френеля для низколетящих и наземных целей. L асимптотически стремится к R, k - коэффициент, характеризующий размер земной поверхности относительно L, фацеты которой переотражают сигнал на цель. ДН на прием-передачу представляет собой функцию ДН антенны, возведенную в квадрат, следовательно, угловой элемент разрешения по азимуту будет определяться как:
При больших L, то есть под малыми углами места, луч ДН значительно обужается в азимутальной плоскости. Энергия, отраженная от земной поверхности и сосредоточенная в узком луче ДН, может быть сравнима или больше энергии основного луча, падающей на цель. При этом стоит учитывать, что ДН в дальней зоне ограничена конусом в результате дифракции радиоволн в раскрыве антенны, вблизи антенны эти результаты не применимы и в грубом приближении можно считать, что до расстояния L2/λ ДН ограничена цилиндром, где L - апертура антенны, соответствующая размеру первой зоны Френеля [8, стр. 376]. Отсюда можно сделать вывод, что при L<R<L2/λ, то есть когда размер зоны Френеля близок к расстоянию между целью и РЛС, линейный элемент разрешения по азимуту равен:

Если R>L2/λ, то 
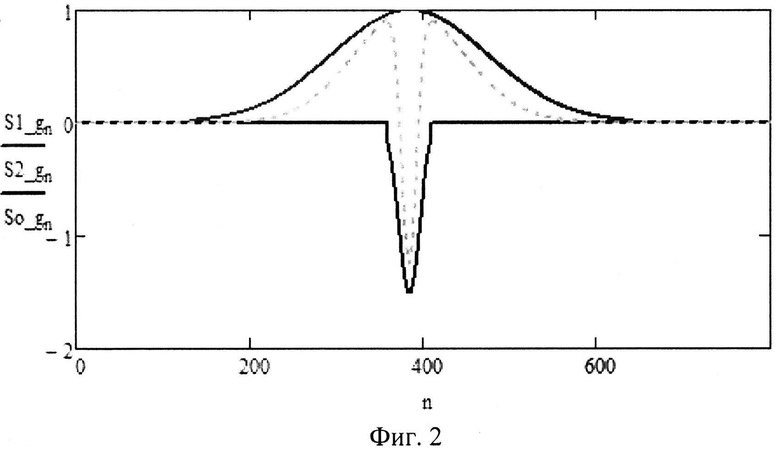
Таким образом, при сканировании по азимуту в РЛС под малыми углами места приходят два сигнала, неразрешаемых по дальности, «земной» и «небесный», которые сформированы, соответственно, фоновой и реальной апертурами антенны, то есть длинная азимутальная пачка, соответствующая эхо-сигналу по азимуту в основном лепестке ДН, и короткая азимутальная пачка, соответствующая ДН, обуженной за счет переотражения от земной поверхности. Причем в РЛС принимается суперпозиция данных сигналов. Поскольку фаза сигнала, отраженного от земной поверхности, меняется на противоположную, произойдет вычитание «земного» и «небесного» сигналов. Представим азимутальные ДН данных сигналов с гауссовой огибающей (фиг. 2).
Пунктиром изображена ДН, принятая в результате. При накоплении данной азимутальной пачки возникает неоднозначность определения азимута цели.
В качестве прототипа заявляемого способа обработки использован традиционный метод измерения угловых координат цели [9, стр. 58]. Разрешающая способность по азимуту достигается за счет ширины ДН при сканировании (вращении ДН) в азимутальной плоскости, а угловое положение антенны, при котором сигнал имеет максимальную амплитуду, принимают за точное направление прихода сигнала - азимут цели.
Недостатком прототипа является невозможность учета отражений от подстилающей поверхности, что приводит к неоднозначности определения азимута цели и ухудшению разрешающей способности по азимуту.
Техническим результатом данного изобретения является однозначное и более точное измерение азимутальной координаты цели под малыми углами места и улучшение разрешающей способности по азимуту.
Указанный технический результат достигается тем, что в известном способе определения угловых координат цели, в котором определяют разрешающую способность по азимуту за счет ширины ДН при сканировании (вращении ДН) в азимутальной плоскости, а угловое положение антенны, при котором сигнал имеет максимальную амплитуду, принимают за азимут цели, далее в отличие от прототипа высокочастотные сигналы, принимаемые фоновой апертурой, отделяют от низкочастотных сигналов, принимаемых реальной апертурой, для чего запоминают полную азимутальную последовательность сигналов за время одного обзора, далее осуществляют дискретное преобразование Фурье сигнала в область пространственных частот, затем осуществляют фильтрацию по верхней частоте, после чего с помощью обратного быстрого преобразования Фурье сигнал переводят во временную область, далее обуженную диаграмму направленности, полученную выделением высокочастотной части азимутального сигнала, используют для определения азимута цели с улучшенной разрешающей способностью.
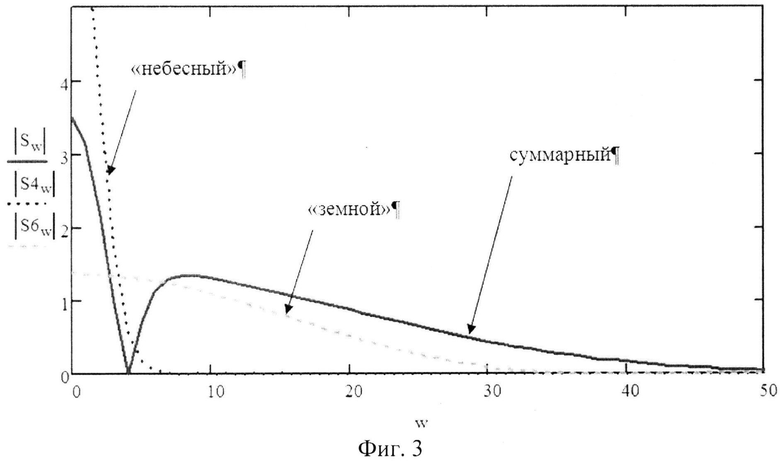
Рассмотрим спектральную характеристику принятой пачки, разложив ее по пространственным частотам (фиг. 3).
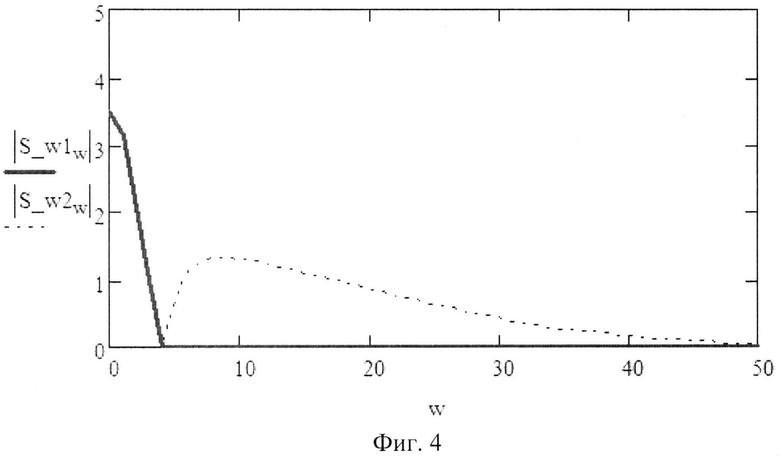
Спектр суммарного сигнала показывает, что большая часть информации содержится в высокочастотной части спектра и за счет большей полосы дает обужение азимутальной пачки. В то время как «небесный» сигнал большой длительности (по аналогии с временными частотами) имеет узкий спектр, соответственно более низкий элемент разрешения по азимуту, а в сумме два сигнала дают неоднозначность определения азимута. В качестве решения данной проблемы возможно использование пространственного фильтра нижних частот (ФНЧ), вырезающего часть спектра, которая соответствует длинной азимутальной пачке (фиг. 4), что врезультате позволит убрать неоднозначность измерения азимута. При использовании фильтра верхних частот (ФВЧ) будет вырезана часть спектра, отвечающая за длинный «земной» сигнал.
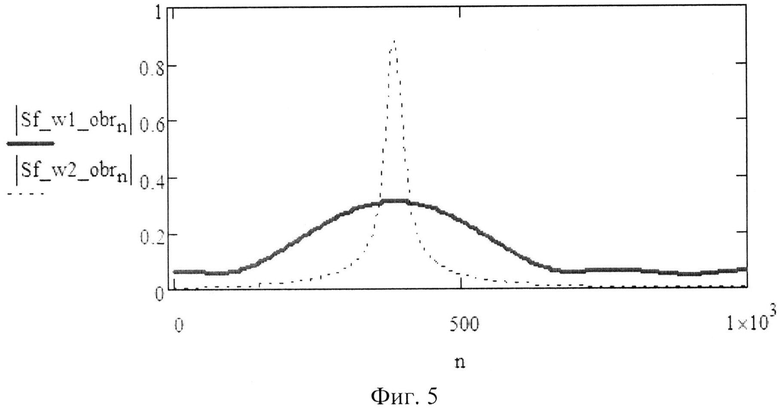
На фиг. 5 показан восстановленный сигнал с ФНЧ (сплошная) и сигнал с применением ФВЧ (пунктир). Видно, что при обработке принятой азимутальной пачки ФВЧ достигается улучшение разрешающей способности РЛС по азимуту, а также однозначное и более точное измерение азимутальной координаты цели.
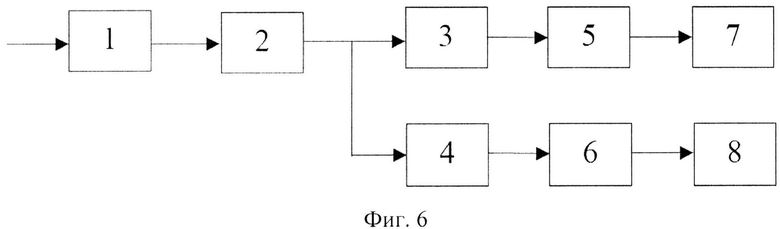
В качестве иллюстрации обработки сигнала по азимуту приведем схему, изображенную на фиг. 6. Данное устройство содержит 1 - блок памяти, настроенный на длительность одного обзора, 2 - блок быстрого преобразования Фурье (БПФ), осуществляющий перевод принятых колебаний в область пространственных частот в соответствии с формулой (1), далее два канала 3 - ФНЧ и 4 - ФВЧ осуществляют соответствующую фильтрацию сигнала, 5, 6 - блоки обратного быстрого преобразования Фурье (ОБПФ) переводят сигнал во временную область, 7, 8 - схемы отбора максимума ДН по азимуту измеряют азимутальную координату цели. Подобная схема позволяет в частотной области разделить «земной» и «небесный» сигналы, но является не единственно возможной, так как обработку возможно осуществлять и во временной области.
Поскольку форма рельефа земной поверхности имеет статистический характер, ширина земного луча, а соответственно и предельного элемента разрешения зависит от коэффициента k и при сканировании может меняться.
Техническое решение является новым, поскольку из общедоступных сведений не известен способ обработки принятых в РЛС колебаний, использующих естественным образом расширенную апертуру (фоновую) - наземный «волновой канал» для улучшения характеристик сигнала, не прибегая при этом к компенсации отражений от подстилающей поверхности.
Принцип действия предложенных пространственных ФНЧ и ФВЧ отличается от хорошо известных временных фильтров. Суть данного различия можно пояснить обработкой принятого РЛС эхо-сигнала в спектральной области, хотя существует также возможность обрабатывать принятые колебания и во временной области.
При обработке принятых сигналов во временной области дальностные отсчеты фиксируются в каждом такте, и обработка по дальности сводится к осуществлению дискретного преобразования Фурье (ДПФ) над каждым принятым тактом с частотой дискретизации сигнала аналого-цифровым преобразователем (АЦП) и дальнейшей обработкой (накоплением) совокупности полученных амплитудно-частотных зависимостей. Осуществление ДПФ над азимутальным сигналом возможно только после принятия полной азимутальной последовательности, поскольку спектр сигнала вычисляется по полной его временной реализации. В случае азимутальной сигнальной пачки частота дискретизации временного сигнала равна тактовой частоте импульсов Fтакт. ДН по азимуту является дискретной функцией fДН (tскан) зависимости амплитуды принятого сигнала от времени сканирования по азимуту, которая в общем случае аппроксимируется гауссовой функцией. Дискретное время tскан можно переписать в виде:
 , где n - номер такта, тогда ДПФ записывается как
, где n - номер такта, тогда ДПФ записывается как
 ,
,
где время Тскан - длительность азимутальной пачки, w - пространственные частоты сигнала. Выбор Тскан должен осуществляться относительно длины азимутальной пачки, так как, исходя из вышеизложенного, обработка ДПФ применяется ко всей азимутальной пачке одновременно. Отсюда очевидно, что размер временного окна должен превышать длительность азимутальной пачки и не должен превышать времени одного обзора пространства, так как одна и та же цель в повторном обзоре будет иметь другой азимут. При этом, поскольку точная азимутальная координата цели нам неизвестна, брать окно меньше времени одного обзора с применением обычного ДПФ нецелесообразно, так как это может привести к разбиению азимутальной пачки на несколько частей.
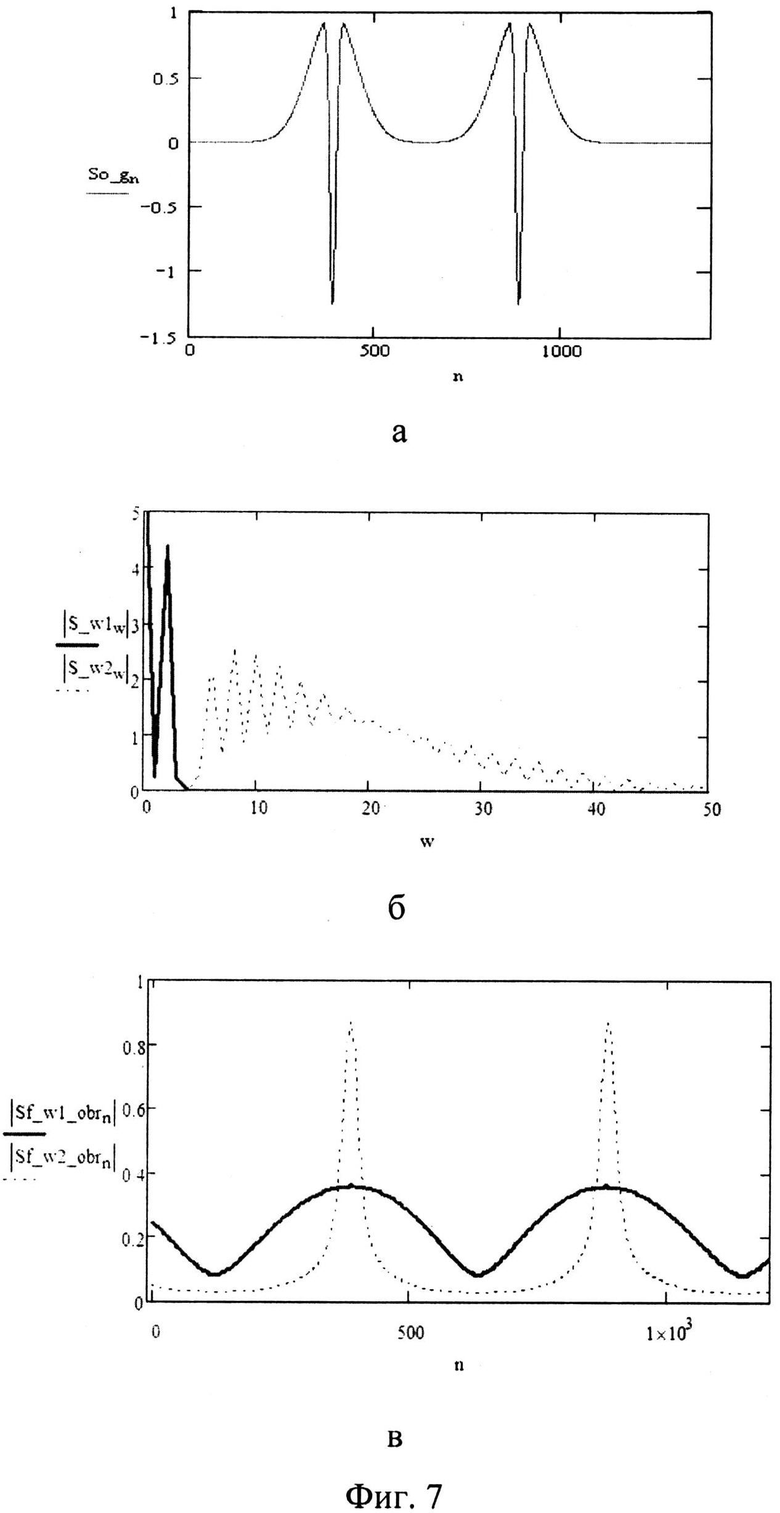
Предлагаемый способ можно проиллюстрировать моделью разрешения двух целей. В случае, когда цели находятся на достаточно большом расстоянии, две цели разрешаются как в канале с ФНЧ, так и в канале с ФВЧ (фиг. 7, а - принятая азимутальная пачка, б - спектр пачки, обработанный ФНЧ и ФВЧ, в - восстановленный сигнал с двух каналов).
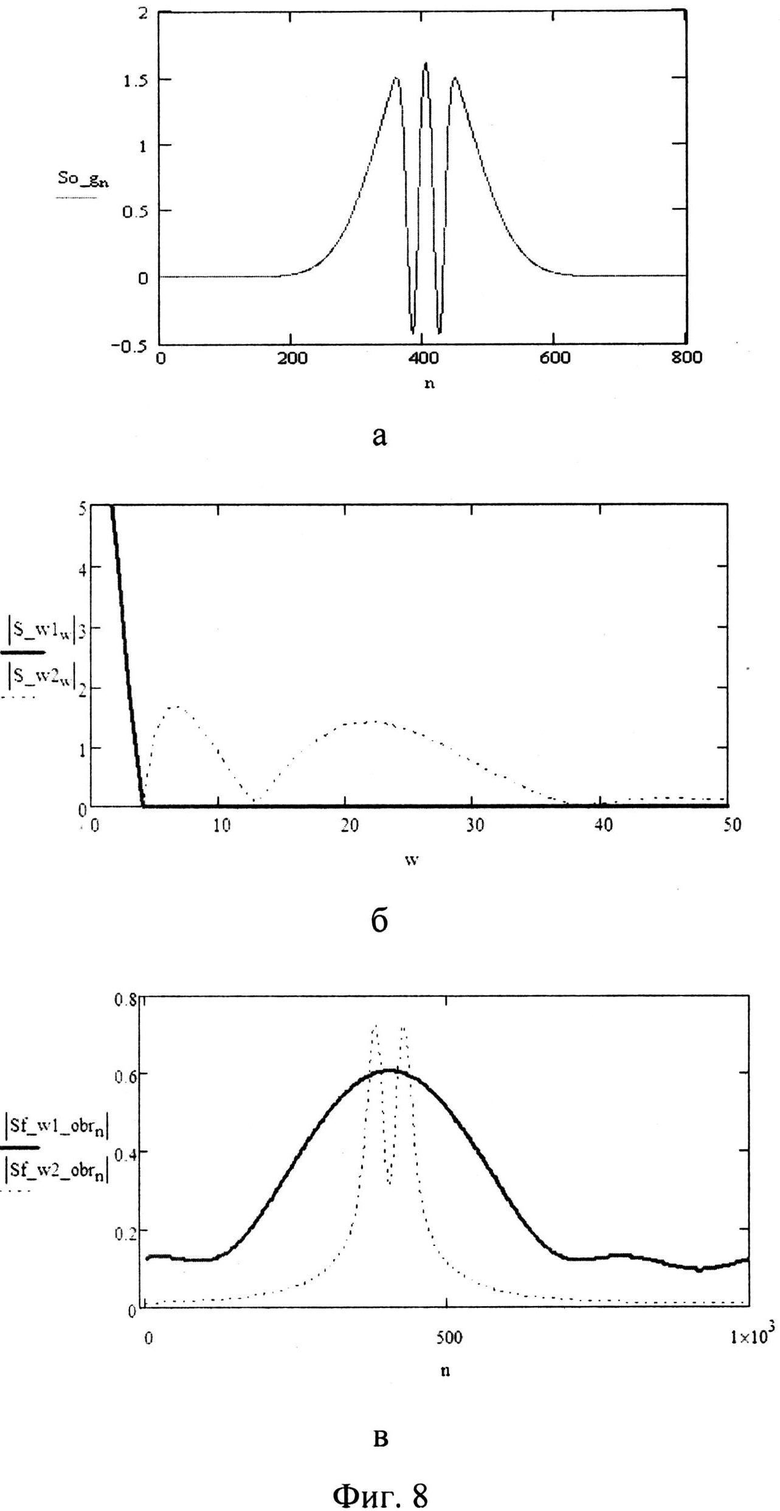
Если же цели находятся достаточно близко, по каналу с ФНЧ они уже не разрешаются, а по каналу с ФВЧ их можно разрешить (фиг. 8).
Аналогичное разделение эхо-сигналов реальной и фоновой апертур можно производить также и во временной области, используя типовые схемы скользящего окна на основе стандартных линий задержек, схем сложения и вычитания, а также разнообразных схем компенсации, уменьшающих взаимодействие между разделяемыми сигналами.
Таким образом, за счет того, что для азимутального разрешения целей под малыми углами места эхо-сигналы, принимаемые фоновой апертурой, отделяют от эхо-сигналов, принимаемых реальной апертурой, и затем обрабатывают, достигается улучшение разрешающей способности РЛС по азимуту, а также однозначное и более точное измерение азимутальной координаты при малых углах места цели на основе анализа спектральной структуры азимутального сигнала с учетом влияния отражений от подстилающей поверхности.
Литература
1. Характеристики последетекторного обнаружения сигналов на фоне помех от морской поверхности при малых углах скольжения луча РЛС. Н.А. Гайдамакин Радиотехника, 1996, №11 с 3-7.
2. Различие параметров прямого и переотраженных от подстилающей поверхности сигналов, Б.В. Ракитин, Н.Г. Духина, Радиотехника 1987, №8 с. 45-46.
3. Adaptive canceller for elevation angle estimation in the presence of multipath. Haykin, S.; Kesler, J. IEE Proceedings, Part F - Communications, Radar and Signal Processing (ISSN 0143-7070), vol. 130, pt. F, no. 4, June 1983, p. 303-308.
4. Калинин А.И., Черенкова ЕЛ. «Распространение радиоволн и работа радиолиний», М., «Связь», 1971
5. Справочник по радиолокации. Под ред. М. Сколника. - М.: Советское радио, 1976, 456 с.
6. Шередько Е.Ю. «Распространение радиоволн и антенно-фидерные устройства», М., «Связь», 1976.
7. Устройства СВЧ и антенны. Д.И. Воскресенский и др. - М.: Радиотехника, 2006, 376 с.
8. Современная радиолокация. Под ред. Ю.Б. Кобзарева. - М.: Советское радио, 1969, 704 с.
9. Д. Бартон «Радиолокационные системы». - М.: Военное издательство МО СССР, 1967, 480 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОЙ ДИНАМИЧЕСКОЙ РАДИОФИЗИЧЕСКОЙ СЦЕНЫ, В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2386143C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2015 |
|
RU2593595C1 |
| СПОСОБ ОБУЖЕНИЯ ПРИЕМНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ И МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2014 |
|
RU2599932C2 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ДАЛЬНОСТИ И АЗИМУТУ | 2005 |
|
RU2287879C2 |
Изобретение относится к области радиолокации, в частности к радиолокационным станциям (РЛС) обнаружения наземных и низколетящих целей. Достигаемый технический результат - однозначное и более точное измерение азимутальной координаты цели под малыми углами места и улучшение разрешающей способности по азимуту. Указанный результат достигается тем, что определяют разрешающую способность по азимуту за счет ширины диаграммы направленности (ДН) при сканировании (вращении ДН) в азимутальной плоскости, а угловое положение антенны, при котором сигнал имеет максимальную амплитуду, принимают за азимут цели, затем высокочастотные сигналы, принимаемые фоновой апертурой, отделяют от низкочастотных сигналов, принимаемых реальной апертурой, для чего запоминают полную азимутальную последовательность сигналов за время одного обзора, далее осуществляют дискретное преобразование Фурье сигнала в область пространственных частот, затем осуществляют фильтрацию по верхней частоте, после чего с помощью обратного быстрого преобразования Фурье сигнал переводят во временную область, далее обуженную диаграмму направленности, полученную выделением высокочастотной части азимутального сигнала, используют для определения азимута цели с улучшенной разрешающей способностью. 8 ил.
Способ измерения азимута наземных целей с учетом отражений от подстилающей поверхности, в котором разрешающая способность по азимуту достигается за счет ширины диаграммы направленности при сканировании в азимутальной плоскости, а угловое положение антенны, при котором сигнал имеет максимальную амплитуду, принимают за азимут цели, отличающийся тем, что для определения азимута цели под малыми углами выделяют сигнал фоновой апертуры, для чего запоминают полную азимутальную последовательность сигналов за время одного обзора, далее осуществляют дискретное преобразование Фурье сигнала в область пространственных частот, затем осуществляют фильтрацию по верхней частоте, после чего с помощью обратного быстрого преобразования Фурье сигнал переводят во временную область, далее обуженную диаграмму направленности, полученную выделением высокочастотной части азимутального сигнала, используют для определения азимута цели.
| БАРТОН Д | |||
| Радиолокационные системы, москва, Воениздат МО СССР, 1967, с.58 | |||
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| JP 2009180514 A, 13.08.2009 | |||
| US 7671789 B1, 02.03.2010 | |||
| US 6121915 A, 19.09.2000. | |||

