Настоящее изобретение относится к области радиолокации, в частности к области ближней радиолокации, к которой принадлежат нелинейные радиолокаторы (НРЛ), осуществляющие поиск объектов, содержащих радиоэлектронные элементы. Эффективность НРЛ основана на использовании радиочастотных резонансных свойств объектов поиска. Для более эффективного возбуждения резонансов в объектах поиска целесообразно использовать в качестве зондирующего широкополосный шумовой сигнал, ширина спектра которого соизмерима с октавой, что определяется максимальной шириной спектра, при которой возможен раздельный прием сигналов высших гармоник. Октавные сигналы по определению являются сверхширокополосными [1, стр. 16].
НРЛ со сверхширокополосным зондирующим сигналом имеет специфические особенности, которые связаны с необходимостью использовать соответствующую радиотехническую аппаратуру. В частности, диапазон сверхширокополосных приемопередающих антенн должен перекрывать частоты первой и второй гармоник сигнала. Наибольшая сложность создания сверхширокополосного приемного тракта заключается в обеспечении его линейности, так как возбуждение паразитных высших гармоник в приемопередающих трактах создает дополнительную помеху. Линейное прохождение эхо-сигнала от цели (второй гармоники зондирующего сигнала) позволяет делать корреляционную обработку для максимального накопления энергии принимаемых колебаний. Корреляционная обработка сверхширокополосного сигнала позволяет улучшить разрешающую способность НРЛ по дальности, то есть дает возможность измерять дальностную координату цели. Другой проблемой нелинейной радиолокации является измерение угловых координат. Требования к массогабаритным характеристикам систем ближней локации не позволяют применять характерные для классической радиолокации антенные системы с большим апертурным раскрывом.
Известный метод синтезирования апертуры антенны, описанный в [2], позволяет добиться высокой точности измерения угловой координаты цели в нелинейной РЛС при использовании малогабаритной антенной системы. Данный метод не применим в стационарных РЛС и требует учета скорости носителя РЛС. При создании наиболее универсального способа, применимого для измерения угловой координаты как в стационарной, так и в подвижной нелинейной РЛС, наиболее целесообразно применение малоразмерных антенных решеток, состоящих из двух элементарных излучателей.
В качестве прототипа заявляемого способа измерения азимута выбран интерферометрический метод, основанный на принципе моноимпульсной радиолокации, суть которого заключается в сравнении отраженных сигналов от объекта, принятых одновременно по двум несовпадающим фазовым диаграммам направленности [3, стр. 15].
Недостатком прототипа является неоднозначность измерения угла при увеличении расстояния между приемными антеннами интерферометра более чем на λ/2, где λ - длина волны сигнала. Условия пространственного расположения антенн на λ/2 на практике возможно только для узкополосных сигналов с близкими максимальной и минимальной частотами в спектре. У сверхширокополосных сигналов данные различия значительны, поэтому соблюдение расстояния между антеннами, равным λ/2 относительно центральной частоты  , обусловливает их сильное взаимодействие на максимальных частотах в спектре
, обусловливает их сильное взаимодействие на максимальных частотах в спектре  , где
, где  - ширина спектра сигнала, и появление дифракционных лепестков на минимальных
- ширина спектра сигнала, и появление дифракционных лепестков на минимальных  . Фактически близкое расположение усиливает взаимное влияние между приемными антеннами сверхширокополосного радиолокатора, и измерение координат становится невозможным.
. Фактически близкое расположение усиливает взаимное влияние между приемными антеннами сверхширокополосного радиолокатора, и измерение координат становится невозможным.
Известен способ формирования виртуальной апертуры элементарных вибраторов [4], расстояние между которыми сокращается относительно реальных антенных элементов без увеличения взаимного влияния. Недостатком данного подхода является неадаптированность его под особенности нелинейной радиолокации.
Техническим результатом данного изобретения является однозначное измерение азимута в сверхширокополосном НРЛ с высокой точностью.
Дополнительным техническим результатом является увеличение разрешающей способности по азимуту.
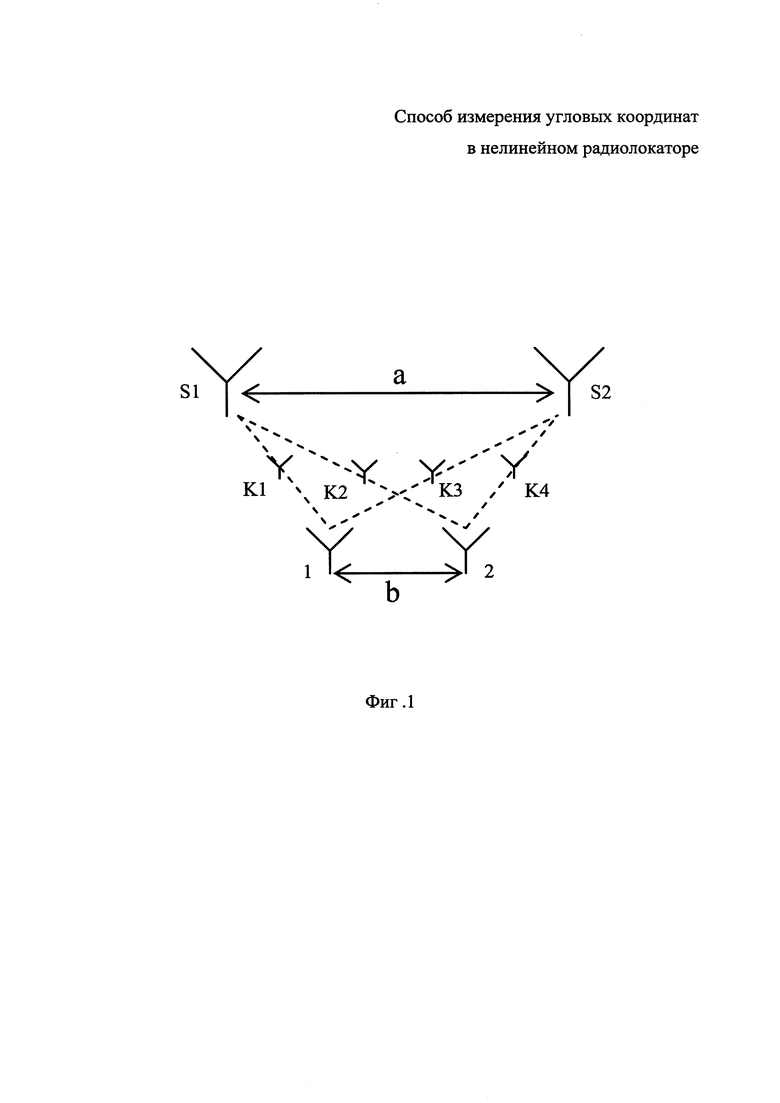
Указанные технические результаты достигаются тем, что в известном способе измерения угловых координат в нелинейном радиолокаторе, включающем измерение азимутальной координаты с помощью интерферометрического метода путем сравнения отраженных сигналов от объекта принятых одновременно по двум несовпадающим фазовым диаграммам направленности, для определения азимутальной координаты объекта поиска используют две независимые передающие антенны S1 и S2, представляющие собой вибраторы, излучающие ортогональные сигналы, расположенные на расстоянии а=2λ друг от друга, и две независимые приемные антенны 1 и 2, расположенные на расстоянии b=λ (см. фиг. 1). Между каждой парой приемного и передающего вибраторов создается виртуальный приемный канал (K1, K2, K3, K4), запаздывание сигнала в каждом из которых соответствует запаздыванию в одиночном приемопередающем вибраторе, помещенном в середину базы между реальными вибраторами. Причем при соблюдении указанных расстояний между приемными и передающими вибраторами расстояние между виртуальными вибраторами составит величину λ/2. В приемные вибраторы приходит сигнал второй гармоники, спектр которого в два раза шире спектра сигнала первой гармоники, а центральная частота  . То есть для обеспечения однозначного измерения азимутального направления на цель расстояние между приемными вибраторами должно быть в два раза меньше расстояния между передающими. Только такая расстановка элементарных вибраторов обеспечивает формирование виртуальной апертуры в нелинейном радиолокаторе.
. То есть для обеспечения однозначного измерения азимутального направления на цель расстояние между приемными вибраторами должно быть в два раза меньше расстояния между передающими. Только такая расстановка элементарных вибраторов обеспечивает формирование виртуальной апертуры в нелинейном радиолокаторе.
Для измерения азимутального направления с помощью виртуальной апертуры измеряется разность фаз Δφ между виртуальными элементами. Разность фаз между виртуальными элементами определяется соотношением в зависимости от расстояния между фазовыми центрами виртуальных вибраторов:
 ,
,
где d - расстояние между фазовыми центрами виртуальных вибраторов с порядковыми номерами n и m, θ - угловое направление на цель. Для измерения разности фаз удобно использовать схему широкополосного коррелятора с расщепленной апертурой и преобразованием Гильберта [5, стр. 373], тогда Δφ будет вычисляться по формуле:
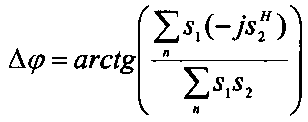 ,
,
где s1, s2 - сигналы виртуальных излучателей, выражение  соответствует преобразованию Гильберта сигнала s2.
соответствует преобразованию Гильберта сигнала s2.
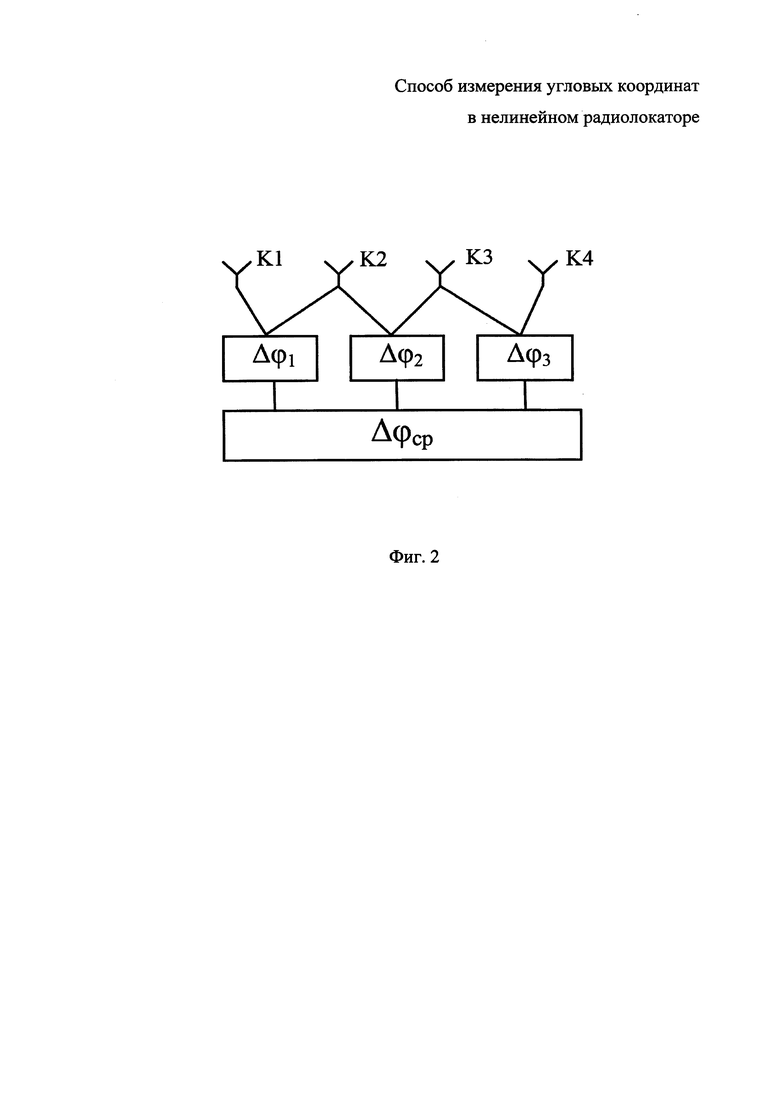
В исследуемой системе (фиг. 1) формируется четыре виртуальных канала, что дает возможность измерения разности фаз между каждыми двумя виртуальными излучателями, расстояние между которыми позволяет однозначно измерять азимут. К примеру, измеряя разность фаз между каналами K1K2, K2K3, K3K4, соответственно Δφ1, Δφ2, Δφ3, получим аналог скользящего окна по каналам виртуальной апертуры (фиг. 2).
В результате, усредняя серию из трех Δφср измерений, абсолютная ошибка измерения азимута уменьшается в  раз, что эквивалентно увеличению энергетического потенциала НРЛ за счет увеличения размеров виртуальной апертуры. Угловое направление на цель определяется по формуле:
раз, что эквивалентно увеличению энергетического потенциала НРЛ за счет увеличения размеров виртуальной апертуры. Угловое направление на цель определяется по формуле:
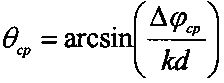 ,
,
где k=2π/λ - волновое число.
Техническое решение является новым, поскольку из общедоступных сведений не известен способ, позволяющий однозначно измерять азимут в сверхширокополосном НРЛ с высокой точностью и получить высокую разрешающую способность по азимуту.
Особенность методов моноимпульсной радиолокации при измерении угловых направлений заключается в том, что в каждом из элементов разрешения по дальности находится только одна блестящая точка. В ближней радиолокации, как правило, используются малоразмерные апертуры с широкой диаграммой направленности (ДН), если в пределах ДН находятся цели, не разрешаемые по дальности, разрешить их по азимуту также невозможно.
Формирование четырех виртуальных приемных каналов позволяет улучшить разрешение по азимуту, так как в виртуальных каналах сохраняется линейный сдвиг фаз в зависимости от азимутального направления. Суммирование четырех сигналов дает обужение ДН виртуальной антенной решетки (АР) по азимуту аналогично реальной линейной АР. То есть суммирование сигналов в виртуальных каналах дает улучшение разрешающей способности по азимуту. Обужение ДН по азимуту сокращает сектор обзора пространства. Для расширения сектора обзора необходимо принять во внимание то, что все четыре виртуальных канала в отличие от элементов реальной АР работают независимо и ДН каждого канала соответствует ДН элементарного излучателя. Суммирование сигналов виртуальных вибраторов с соответствующими линейными задержками τ (фиг. 3) позволяет организовать сканирование по азимуту [6, стр. 8].
Формирование при этом четырех-пяти ортогональных лучей (фиг. 4) покрывает всю зону обзора пространства, что позволяет сократить время поиска объектов, содержащих радиоэлектронные элементы.
Таким образом, формирование виртуальной апертуры позволяет однозначно измерять азимутальную координату цели интерферометрическим методом с высокой точностью с помощью скользящего окна по каналам виртуальной апертуры в сверхширокополосном НРЛ и дополнительно увеличить разрешающую способность по азимуту.
Литература
1. Чапурский В.В. Избранные задачи теории сверхширокополосных радиолокационных систем. М.: МГТУ им. Н.Э. Баумана, 2012, 279 с.
2. Патент РФ на изобретение №2397509 «Нелинейная РЛС с синтезированной апертурой антенны», G01S 13/90. Опубликовано: 20.08.2010.
3. Родс Д.Р. Введение в моноимпульсную радиолокацию. М.: Советское радио, 1960, 160 с.
4. Черняк B.C. О новом направлении в радиолокации: MIMO РЛС // Прикладная радиоэлектроника, 2009, Том 8, №4, с. 477-489.
5. Бурдик B.C. Анализ гидроакустических систем. Л.: Судостроение, 1988, 392 с.
6. Вендик О.Г. Атенны с немеханическим движением луча. М.: Советское радио, 1965, 360 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ ВЫСОТЫ ОБЪЕКТА ПОИСКА В ОБЗОРНЫХ НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ | 2013 |
|
RU2530542C1 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ВОЗДУШНЫХ ЦЕЛЕЙ С ПОМОЩЬЮ ДОПЛЕРОВСКОЙ РЛС | 2014 |
|
RU2546967C1 |
| СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ИЗМЕРЕНИЯ АЗИМУТА НАЗЕМНЫХ ЦЕЛЕЙ С УЧЕТОМ ОТРАЖЕНИЙ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2014 |
|
RU2572843C1 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347237C1 |
| Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов | 2024 |
|
RU2835850C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
Настоящее изобретение относится к области радиолокации, в частности к области ближней радиолокации, к которой принадлежат нелинейные радиолокаторы (НРЛ), осуществляющие поиск объектов, содержащих радиоэлектронные элементы. Достигаемый технический результат - однозначное измерение азимута в сверхширокополосном НРЛ, а также - увеличение разрешающей способности по азимуту. Указанные результаты достигаются тем, что в способе измерения угловых координат в нелинейном радиолокаторе, включающем измерение азимутальной координаты с помощью интерферометрического метода путем сравнения отраженных сигналов от объекта принятых одновременно по двум несовпадающим фазовым диаграммам направленности, для определения азимутальной координаты объекта поиска используют две независимые передающие антенны S1 и S2, представляющие собой вибраторы, излучающие ортогональные сигналы, расположенные на расстоянии а=2λ друг от друга, и две независимые приемные антенны 1 и 2, расположенные на расстоянии b=λ. Между каждой парой приемного и передающего вибраторов создается виртуальный приемный канал (K1, K2, K3, K4), запаздывание сигнала в каждом из которых соответствует запаздыванию в одиночном приемопередающем вибраторе, помещенном в середину базы между реальными вибраторами. Причем при соблюдении указанных расстояний между приемными и передающими вибраторами расстояние между виртуальными вибраторами составит величину λ/2. В приемные вибраторы приходит сигнал второй гармоники, спектр которого в два раза шире спектра сигнала первой гармоники, а центральная частота  . Для обеспечения однозначного измерения азимутального направления на цель расстояние между приемными вибраторами должно быть в два раза меньше расстояния между передающими. Такая расстановка элементарных вибраторов обеспечивает формирование виртуальной апертуры в нелинейном радиолокаторе. Между каждой парой соседних виртуальных каналов измеряют разность фаз Δφ, в результате вычисляют среднее значение разности фаз Δφср и определяют угловое направление на цель по формуле:
. Для обеспечения однозначного измерения азимутального направления на цель расстояние между приемными вибраторами должно быть в два раза меньше расстояния между передающими. Такая расстановка элементарных вибраторов обеспечивает формирование виртуальной апертуры в нелинейном радиолокаторе. Между каждой парой соседних виртуальных каналов измеряют разность фаз Δφ, в результате вычисляют среднее значение разности фаз Δφср и определяют угловое направление на цель по формуле:  , где k=2π/λ - волновое число, d - расстояние между фазовыми центрами виртуальных антенн. 4 ил.
, где k=2π/λ - волновое число, d - расстояние между фазовыми центрами виртуальных антенн. 4 ил.
Способ измерения угловых координат в нелинейном радиолокаторе, в котором измерение азимутальной координаты происходит интерферометрическим методом путем сравнения отраженных сигналов от объекта, принятых одновременно по двум несовпадающим фазовым диаграммам направленности, отличающийся тем, что выбирают две независимые передающие антенны, расположенные на расстоянии а=2λ, и две приемные антенны, расположенные на расстоянии b=λ, образующие в середине между собой четыре канала виртуальной апертуры, затем между каждой парой соседних виртуальных каналов измеряют разность фаз Δφ, в результате вычисляют среднее значение разности фаз Δφср и определяют угловое направление на цель по формуле:
| РОДС Д.Р | |||
| Введение в моноимпульсную радиолокацию | |||
| Москва,Советское радио, 1960, с.15 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2317562C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ ВЫСОТЫ ОБЪЕКТА ПОИСКА В ОБЗОРНЫХ НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ | 2013 |
|
RU2530542C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| US 5191343 A, 02.03.1993 | |||
| US 20140313071 A1, 23.10/2014 | |||
| WO 2002014891 A2, 21.02.2002. | |||

