Изобретение относится к области промысловой навигации и промышленного рыболовства при помощи буксируемых орудий лова, преимущественно к траулерам с кормовым тралением, и предназначено автоматизировать непрерывный контроль параметров хода и работы трала.
Известно устройство контроля перекоса рыболовного трала, которое включает датчик симметрии с излучающе-приемной системой и чувствительными элементами, канал связи и бортовой приемник-индикатор/регистратор тралового зонда, при этом бортовой приемник/регистратор тралового зонда снабжен измерителями временных интервалов (в единицах расстояния) между моментами прихода к излучающеприемной системе датчика симметрии ответных сигналов чувствительных элементов, а чувствительные элементы выполнены в виде акустических приемоответчиков-глубиномеров-ретрасляторов с формирователями временных стробов манометрического типа, устанавливаемых на траловых досках (А.С. СССР №1784154, А 01 К 73/10. "Устройство контроля перекоса рыболовного трала", опубл. 30.12.1992. Бюл. №48) - [1]. Недостатком известного устройства является то, что оно может контролировать только характеристики состояния трала.
Известен способ, заключающийся в измерении и сравнении расстояний между опорной точкой, расположенной на оси симметрии трала, и контрольными точками, расположенными на трале или его элементах симметрично относительно оси. Кроме того, измеряют расстояния между горизонтами опорной и каждой из контрольных точек и по алгебраической разности этих расстояний судят о наличии и величине перекоса (А.С. СССР №1395247, А 01 К 73/10. "Способ определения перекоса рыболовного трала", опубл. 15.05.1988. Бюл. №18) - [2]. Недостатком известного способа является то, что он предусматривает установку устройства для его осуществления за бортом - на трале и его элементах.
Наиболее близким к заявляемому изобретению является способ, реализованный в устройстве, и устройство контроля перекоса рыболовного трала по авторскому свидетельству СССР №1253556, А 01 К 73/10, опубликованному 30.08.1986. Бюл. №32 - [3]. Устройство-прототип содержит датчик перекоса, закрепленный в середине подбора трала, приемник сигнала датчика, установленный на борту судна, канал связи между датчиком перекоса и приемником сигнала и два усилителя, закрепленные на подборе. Датчик перекоса выполнен электрохимическим, состоящим из элементов Г-образной формы, имеющих конусные насадки и установленных так, что одни колена элементов направлены вдоль подборы в разные стороны, а другие колена перпендикулярно подборе, при этом входы усилителей соединены с электрохимическим датчиком, а выходы - с приемником сигнала, выполненным в виде двух записывающих приборов.
В этом устройстве реализован способ, по которому получают информацию о наличии перекоса устья трала и бокового горизонтального течения и устраняют перекосы устья трала и выбирают курс судна, совпадающий с вектором течения судна-буксировщика.
Однако по этому способу и устройству недостаточно точно и комплексно решают задачу буксировки трала по оптимальному курсу.
Технический эффект, на достижение которого направлено заявляемое изобретение, заключается в расширении функциональных возможностей за счет определения параметров хода трала: отклонения ваеров от диаметральной плоскости (ДП) судна, угла раствора ваеров и угла ухода ваеров в воду (перекоса трала) и параметров движения судна-буксировщика: угла дрейфа (сноса) и путевого угла (ПУ).
Технический эффект достигается тем, что по способу определения параметров хода трала, по которому формируют сигналы о перекосе трала, новым является то, что дополнительно формируют сигналы по величине отклонений углов правого и левого ваеров относительно диаметральной плоскости судна-буксировщика и сигналы по величине углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика, по которым определяют сигналы о параметрах хода трала и движения судна-буксировщика. Сигнал о перекосе трала образуют при нарушении равенства углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика и определяют как разность сигналов величин углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика. Угол раствора ваеров определяют как величину, пропорциональную сумме сигналов отклонений углов правого и левого ваеров относительно диаметральной плоскости судна-буксировщика. Угол дрейфа определяется как величину, пропорциональную разности сигналов отклонений углов левого и правого ваеров. Путевой угол находят как результат сложения истинного курса и угла дрейфа.
В устройстве для определения параметров хода трала, содержащем датчики перекоса трала и вычислительный блок, новым является то, что устройство имеет правый и левый преобразователи углов отклонений ваеров от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии судна-буксировщика, каждый из которых содержит неподвижную платформу с вертикальной осью, установленную на судне-буксировщике вблизи ухода каждого из ваеров за борт, подвижную платформу с вертикальным шарниром, посаженную на вертикальную ось неподвижной платформы с возможностью поворота, штангу, свободный конец которой соприкасается с ваером, а другой конец жестко соединен с вертикальным шарниром подвижной платформы, и датчики углов отклонения ваеров относительно диаметральной плоскости и плоскости ватерлинии судна-буксировщика, при этом датчики подключены к вычислительному блоку, являющемуся выходом устройства по параметрам хода трала и движения судна-буксировщика. Датчики углов отклонения ваеров относительно диаметральной плоскости установлены на неподвижной платформе, а их чувствительные элементы функционально связаны с подвижной платформой. Датчики углов отклонения ваеров относительно плоскости ватерлинии судна-буксировщика установлены на подвижной платформе, а их чувствительные элементы функционально связаны с вертикальным шарниром. В устройстве свободный конец штанги снабжен наконечником, в котором установлены постоянные магниты.
Сущность изобретения поясняется на Фиг.1-3, где:
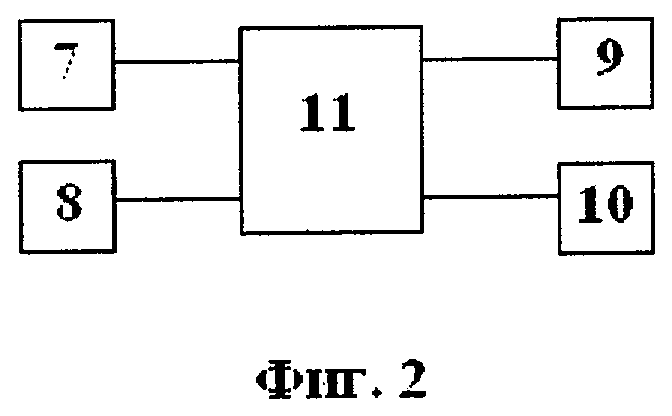
Фиг.1 - схема устройства;
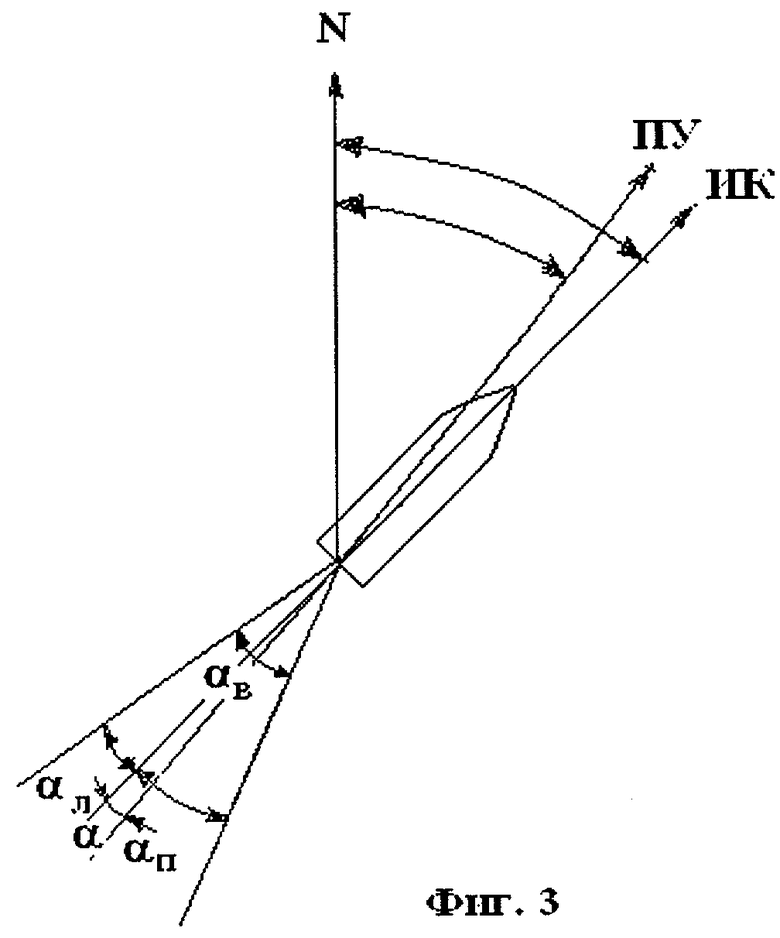
Фиг.2 - блок-схема;
Фиг.3 - схема параметров движения судна-буксировщика и хода трала.
Здесь: 1 - штанга; 2 - наконечник с постоянным магнитом; 3 - подвесной ролик; 4 - ваер; 5 - неподвижная платформа; 6 - подвижная платформа с вертикальным шарниром; 7 - датчик угла отклонения правого ваера относительно диаметральной плоскости судна-буксировщика; 8 - датчик угла отклонения левого ваера относительно диаметральной плоскости судна-буксировщика; 9 - датчик угла ухода в воду правого ваера относительно плоскости ватерлинии судна-буксировщика; 10 - датчик угла ухода в воду левого ваера относительно плоскости ватерлинии судна-буксировщика; 11 - вычислительное устройство.
Датчики 7-10 могут быть выполнены омическими, индуктивными, емкостными, трансформаторными и т.д. (Д.И.Агейкин и др. Датчики контроля и регулирования. - М.: Машиностроение, 1965, с.24-32, 114, 149, 205) - [4]. Например, в качестве датчиков 7-10 могут использоваться сельсины (Шульц Ю. Электроизмерительная техника: 1000 понятий для практиков: Справочник: Перевод с нем. - М.: Энергоатомиздат, 1989, с.194-195) - [5].
Устройство для определения параметров хода трала состоит из правого и левого преобразователей углов отклонений ваеров 4 от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии, установленных в районе ухода ваеров 4 за борт и закрепленных в удобном месте на судне-буксировщике, например над подвесным роликом 3 (не показано). Выходы правого и левого преобразователей углов отклонений ваеров от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии судна-буксировщика являются выходами устройства по параметрам хода трала и движения судна-буксировщика.
Каждый преобразователь (правый и левый) состоит из неподвижной платформы 5 с вертикальной осью, на которую посажена с возможностью горизонтального поворота подвижная платформа 6 с вертикальным шарниром. Правый (левый) преобразователь содержит датчик 7 (8) угла отклонения правого (левого) ваера 4 от диаметральной плоскости судна-буксировщика, установленный на неподвижной платформе 5 с вертикальной осью (например, статор сельсина), причем чувствительный элемент датчиков (например, ротор сельсина) функционально (кинематически) связан с подвижной платформой 6. Для визуального отсчета корпус неподвижной платформы 5 снабжен шкалой. На подвижной платформе 6 с вертикальным шарниром расположены датчики 9 (10) углов ухода ваера в воду относительно плоскости ватерлинии судна-буксировщика (например, статор сельсина), у которого чувствительный элемент (например, ротор сельсина) функционально (кинематически) связан с штангой 1. Для визуального отсчета углов поворота штанги 1 корпус подвижной платформы 6 также снабжен шкалой.
Сигналы с датчиков 7 (8) углов отклонения правого и левого ваера относительно диаметральной плоскости судна-буксировщика и с датчиков 9 (10) углов ухода в воду правого и левого ваера относительно плоскости ватерлинии судна-буксировщика поступают на вычислительное устройство 11, которое преобразует их, формирует, регистрирует, вычисляет параметры хода трала, его состояния, вычисляет параметры движения судна-буксировщика и выдает на показывающие устройства.
Каждый вертикальный шарнир подвижной платформы 6 жестко соединен со штангой 1, свободный конец которой снабжен наконечником 2 с вмонтированным постоянным магнитом для надежного контакта с ваером 4.
Предложенное устройство работает следующим образом.
После окончания спуска трала, когда ваеры взяты на стопор, свободный конец каждой (правой и левой) штанги 1 при помощи наконечника 2, снабженного постоянным магнитом, устанавливается на соответствующий (правый и левый) ваер 4. Сигналы от датчиков углов отклонений от диаметральной плоскости судна-буксировщика 7, 8 и углов отклонений от плоскости ватерлинии судна-буксировщика 9, 10 поступают на вычислительное устройство 11, определяющее параметры хода трала и движения судна-буксировщика.
Угол α дрейфа (сноса) определяется как разность угла отклонения левого ваера αл и угла отклонения правого αп ваера: α=αл-αп.
Путевой угол (ПУ) находят как результат сложения истинного курса (ИК) и угла α дрейфа (сноса): ПУ=ИК+(αл-αп)=ИК+α.
Угол αв раствора ваеров определяют как сумму углов отклонений правого и левого ваеров: αв=αл-αп.
Неравенство углов ухода правого и левого ваеров в воду сигнализирует о перекосе трала и его ненормальной работе (как правило, трудно устранимого).
Угол дрейфа (сноса) также характеризует наличие перекоса трала (легко устранимого).
Колебание угла раствора ваеров указывает, что траловые доски работают ненормально.
Резкое или одновременное изменение угла раствора ваеров и углов ухода ваеров в воду указывает на задев трала.
Угол ухода ваеров в воду является функцией скорости трала (судна).
Знание указанных параметров хода трала создает предпосылки для безаварийной и производительной работы при добыче рыбы. Судоводитель по полученной информации более эффективно маневрирует тралом и судном-буксировщиком, что ведет к повышению производительности труда.
Так, например, отклонение ваеров относительно диаметральной плоскости судна-буксировщика указывает на дрейф (снос) судна-буксировщика и позволяет вычислить путевой угол (ПУ) судна-буксировщика, что важно само по себе для безопасности судовождения. Кроме того, знание путевого угла судна-буксировщика позволяет уточнить и выбрать более эффективные промысловые курсы. Знание отклонения ваеров относительно диаметральной плоскости судна-буксировщика позволяет точно вычислить, на сколько следует потравить один из ваеров, чтобы выровнять ход трала.
Угол раствора ваеров указывает на степень раскрытия трала и является косвенным признаком скорости трала и судна-буксировщика. Колебание угла раствора ваеров указывает, что траловые доски работают ненормально.
Таким образом, предложены способ и устройство для определения параметров хода трала преимущественно для судов с кормовым тралением, позволяющие определить количественно и произвести достоверную оценку с достаточной точностью параметров хода трала и параметров движения судна-буксировщика.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛОКОЛЬНАЯ РАСХОДОМЕРНАЯ УСТАНОВКА ДЛЯ ГАЗА | 1992 |
|
RU2039943C1 |
| Способ определения перекоса трала | 1977 |
|
SU713553A1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОДЕРЖАНИЯ ОЗОНА | 2006 |
|
RU2365913C2 |
| Устройство для притопления ваеров на промысловых судах кормового траления при работе во льдах | 1977 |
|
SU721048A1 |
| Трал для лова гидробионтов | 1991 |
|
SU1824130A1 |
| Трал для лова рыбы | 1983 |
|
SU1158134A1 |
| Способ и устройство контроля ведения промысловых работ с использованием трала при осуществлении мониторинга судов рыбопромыслового флота | 2017 |
|
RU2666170C1 |
| УСТРОЙСТВО для СПУСКА и ПОДЪЕМА ОРУДИЙ ЛОВА | 1973 |
|
SU379448A1 |
| Трал для лова рыбы | 1991 |
|
SU1797457A3 |
| Устройство для определения перекоса устья трала | 1983 |
|
SU1253556A1 |
Изобретение относится к области промысловой навигации и промышленного рыболовства при помощи буксируемых орудий лова, преимущественно к траулерам с кормовым тралением, и предназначено автоматизировать непрерывный контроль параметров хода и работы трала. Дополнительно формируют сигналы по величине отклонений углов правого и левого ваеров относительно диаметральной плоскости судна-буксировщика и сигналы по величине углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика, по которым определяют сигналы о параметрах хода трала и движения судна-буксировщика. Устройство имеет правый и левый преобразователи углов отклонений ваеров от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии судна-буксировщика, выходы которых являются выходами устройства по параметрам хода трала и движения судна-буксировщика. Обеспечивается расширение функциональных возможностей - позволяет определить промысловые курсы и произвести достоверную оценку с достаточной точностью параметров хода трала и параметров движения судна-буксировщика. 2 н. и 6 з.п. ф-лы, 3 ил.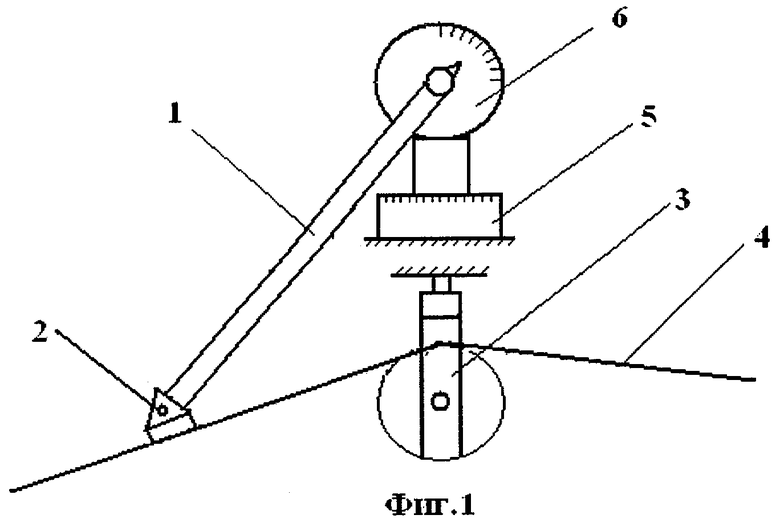
| Устройство для определения перекоса устья трала | 1983 |
|
SU1253556A1 |
| Способ определения перекоса рыболовного трала | 1986 |
|
SU1395247A1 |
| Устройство для контроля перекоса рыболовного трала | 1990 |
|
SU1784154A1 |
| Захватное устройство | 1984 |
|
SU1221169A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА РЫБЫ | 2002 |
|
RU2229226C1 |

