Настоящее изобретение относится к области авиационной техники и может быть использовано для проектирования и производства беспилотных и дистанционно-управляемых аппаратов, предназначенных для наблюдения за местностью и объектами.
В настоящее время широко известны различные виды дирижаблей, их конструкции и технологии их производства. Основные виды представлены в монографии Арис М.Я. Дирижабли. Киев: Наук. думка, 1986. - 264 с.
Из существующего уровня техники известен дирижабль Goodyear Lightship "Spirit of Safety" производства American Blimp Corporation, США (http://www.airshipsonline.com/airships/Goodyear/Index.htm), который является аппаратом легче воздуха и способен транспортировать пассажиров (пилота плюс 3 взрослых пассажира) за счет подъемной силы, создаваемой газом в баллоне, а также вести наблюдение установленными на нем камерами. Дирижабль содержит аэростат, кабину, закрепленную под аэростатом, двигатели, установленные на кабине, оперение, швартовочные канаты. По курсу дирижабль движется за счет тяги двигателей. Грузоподъемность определяется объемом газа в аэростате и, следовательно, размерами аппарата. Вместе с тем грузоподъемность и внеаэродромное базирование являются очевидными преимуществами подобных аппаратов.
Известными недостатками этих аппаратов является то, что швартовочные сооружения могут представлять собой сверхсложные с технической точки зрения сооружения, чтобы обеспечить посадку дирижабля, потенциально опасную в условиях сильного ветра в посадочной области, а также высокая стоимость обслуживания, помимо малой скорости по сравнению с вертолетами и самолетами, и эти недостатки приводят к снижению эффективности аппарата в области транспортирования по воздуху.
Из прошлого авиастроения известно техническое решение с подвижными концами крыла, раскрытое в самолете (авторское свидетельство СССР №65022 опубл. 31.08.1945, Самолет с выдвижными концами крыльев), который содержит фюзеляж, крыло, оперение, шасси, двигатель и отличается тем, что концы консолей крыла имеют возможность убираться в крыло.
Недостатками данного технического решения является то, что крыло в концевых сечениях конструктивно усложнено и имеет излишнюю массу, что снижает эффективность по весу.
Наиболее близким к заявленному техническому решению по технической сущности является «Упрощенный подъемный парусный аппарат» (патент US 7,263,939 В1, опубл. 04.09.2007, US Cl. 114/39, МПК B63H 9/04, «Simplified elevated sailing apparatus»), включающий аэростат с оперением, крыло, раму, объединяющую конструкцию аппарата в единое целое.
В патенте представлены варианты конструкции дирижабля:
а) аэростат с оперением, рама, крыло с элеронами, трос;
б) аэростат с оперением, рама, крыло, трос, стабилизатор с рулем направления;
в) аэростат, рама, оперение, крыло с элеронами, трос;
г) аэростат, рама, оперение, мягкое крыло.
Также оговорены схемы управления - дистанционное или автоматическое (автопилот).
Недостатком данного технического решения является узкая область использования аппарата как летательного аппарата, например отсутствие двигателя, что не дает осуществлять управляемый полет, или отсутствие средств наблюдения, что понижает эффект использования аппарата (вид с высоты дает больше информации, чем вид с земли), и как следствие, низкая эффективность летательного аппарата. Использование классических средств управления аппаратом таких, как элероны и рулевые поверхности, также является недостатком, так как для малого и легкого аппарата проще повернуть всю аэродинамическую поверхность, например поворотный киль, чем отдельную ее часть.
Решаемой задачей является создание перспективного дирижабля для наблюдения за местностью, безопасного для эксплуатации, предельно простой конструкции, способного совершать управляемый полет в автоматическом или дистанционно управляемом режимах.
Технический результат направлен на повышение эффективности дирижабля.
Технический результат достигается тем, что в дирижабль с подвижным крылом, содержащий аэростат, раму, крыло, киль и стабилизатор, швартовочное устройство, двигатели, введены рельсы, механизм поворота стабилизатора и механизм перемещения крыла, причем крыло выполнено с возможностью перемещения по рельсам в направлении, перпендикулярном оси симметрии дирижабля, а стабилизатор выполнен поворотным в плоскости симметрии дирижабля.
Преимуществом, обеспечиваемым приведенной совокупностью признаков, является простая конструкция аппарата: упрощенная схема управления, простая конструкция крыла. В случае перемещения всего крыла крыло выполняется более простой конструкции вследствие отсутствия необходимых усилений конструкции под элероны. Если элероны выполнены только по части задней кромки крыла, то для управления необходимо ввести дополнительные элементы в систему управления, что не требуется для подвижного крыла, где предельно просто усилие от привода передается на крыло.
Сущность изобретения поясняется чертежами, на которых изображено:
на фиг.1 - вид дирижабля спереди;
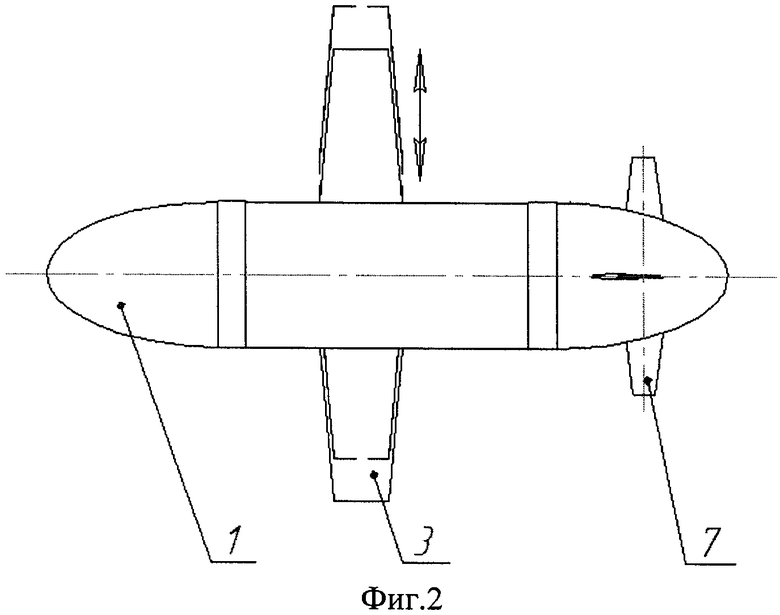
на фиг.2 - вид дирижабля сверху;
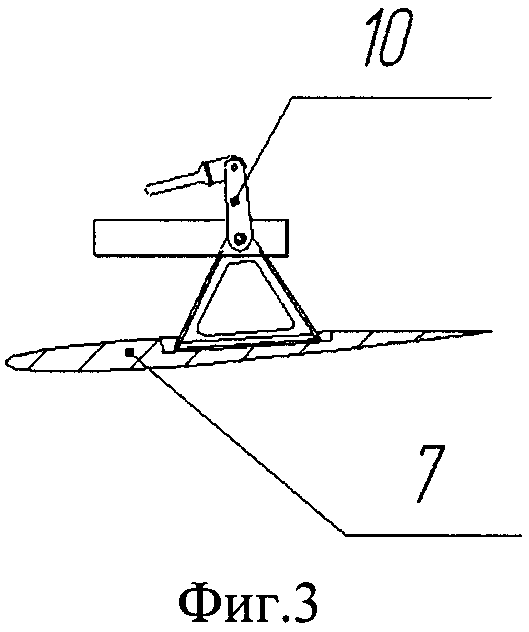
на фиг.3 показан стабилизатор дирижабля;
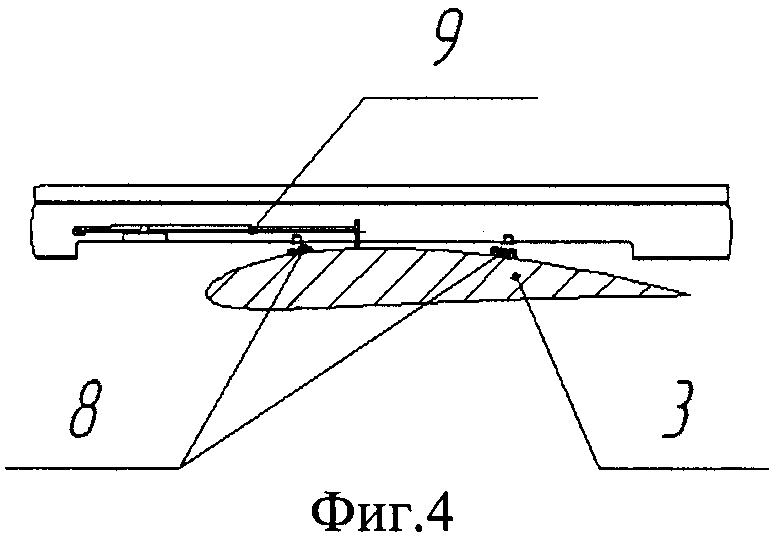
на фиг.4 показано закрепление крыла с механизмами перемещения крыла.
где:
1. Аэростат
2. Киль
3. Крыло
4. Рама
5. Двигатель
6. Лента
7. Стабилизатор поворотный
8. Рельс
9. Механизм перемещения крыла
10. Механизм поворота стабилизатора.
Предлагаемое изобретение содержит аэростат 1 с закрепленным на нем килем 2, который прикреплен через ленты 6 к раме 4, которая является основой дирижабля. На раме 4 установлены рельсы 8, на которых навешено крыло 3, механизм перемещения крыла 9, стабилизатор 7 и механизм поворота стабилизатора 10, двигатели 5. Стоит отметить, что швартовочное устройство является частью рамы 4 и не представлено отдельным элементом.
Работает устройство следующим образом. Аэростат 1, наполненный рабочим телом (гелием), создает выталкивающую силу, равной примерно 10 Н силы на 1 м3 газа (данные расчетные). Выталкивающая сила составляет 95% от необходимой для полета аппарата полной подъемной силы. Еще 5% создается крылом 3. Однако крыло 3 потенциально имеет возможность создать подъемную силу, превосходящую требуемую за счет большей площади крыла 3. Это использовано в том, что, придав аппарату небольшую скорость, получаем требуемую подъемную силу на крыле 3.
Полная подъемная сила (выталкивающая сила в аэростате 1 плюс подъемная сила на крыле 3) обеспечивает набор высоты дирижабля. Для движения по курсу и маневрирования используются двигатели 5. Спуск осуществляется за счет уменьшения подъемной силы на крыле 3. Так как аппарат спроектирован так, что без крыла 3 обладает отрицательной сплавной силой (подразумевается разность между полной подъемной силой и полным весом дирижабля), то достаточно понизить тягу двигателей 5, чтобы аппарат перешел на плавное снижение. Плавное снижение и малая скорость - это следствие высокой инертности аэростата. Для беспилотной техники приоритетным является качество и количество получаемой информации в ходе полета, и малая скорость идет в преимущества дирижабля в отличие от транспортных летательных аппаратов.
Управление по тангажу осуществляется установкой угла поворота стабилизатора 7 (Фиг.3). Управление по крену - установкой смещения крыла 3 на соответствующий борт (Фиг.2). При этом на частях крыла 3 в потоке слева и справа создаются неравные по величине подъемные силы. В результате аппарат кренится в сторону борта с меньшей частью крыла 3 в потоке. Перемещению крыла 3 в направлении, поперечном набегающему потоку, не оказывают сопротивления силы, действующие на крыло 3 от набегающего потока, и, следовательно, само перемещение не требует приложение значительных усилий к механизму перемещения крыла 9. Управление по рысканию осуществляется совместной установкой угла установки поворотного стабилизатора 7 и смещения крыла 3.
Для обеспечения устойчивости на дирижабле установлена система автоматического управления, которая в режиме реального времени корректирует положение аппарата и обеспечивает его управляемый полет.
По сравнению с известными аналогами, а именно с беспилотной техникой, применяемой в настоящее время, заявляемое техническое решение имеет ряд технико-экономических преимуществ, а именно:
- безопасность эксплуатации:
рабочее тело - гелий не взрывается и не горит;
в случае падения с высоты аппарат не обладает большой массой и не нанесет значительного ущерба;
аппарат физически не способен набирать значительную скорость и в случае аварийной ситуации плавно спустится на землю.
- аппарат предельно упрощен конструктивно. Исключены элементы, необходимые для управления аппаратом и требующие дополнительных конструктивных элементов, такие как рули и элементы проводки управления к ним. Таким образом упрощены процессы изготовления крыла и оперения, что выгодно сказывается на технологичности и экономической эффективности дирижабля. Введено минимальное количество приводов для управления аппаратом, один - на перемещения крыла и обеспечения управления по крену и второй - для поворота стабилизатора для управления по тангажу, а управление по рысканию обеспечивается совместной работой этих приводов, что значительно сокращает энергозатраты. Минимальное количество элементов в конструкции увеличивает весовую эффективность дирижабля и повышает его надежность.
- на дирижабле установлена система автоматического управления, которая позволяет управлять аппаратом в автоматическом режиме (маршрут по точкам) или в дистанционно управляемом режиме оператором (через наземную станцию по радиоканалу).
Полезные свойства: удобство в эксплуатации, несложный состав оборудования для осуществления управления аппаратом.
К преимуществам дирижаблей относят внеаэродромное базирование и возможность продолжительное время находиться в воздухе: беспилотный дирижабль использует двигатели только для корректировки положения, что увеличивает продолжительность полета и снижает эксплуатационные расходы аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОПОЕЗД С ПИТАНИЕМ ОТ ТРОЛЛЕЯ (ВАРИАНТЫ) | 2018 |
|
RU2692345C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| КОНВЕРТОПЛАН | 2011 |
|
RU2456209C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1999 |
|
RU2162809C2 |
| КОНВЕРТОПЛАН | 2011 |
|
RU2456208C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
Изобретение относится к области авиационной техники. Дирижабль содержит аэростат (1) с килем (2), лентами (6), прикрепленный к раме (4), на которой закреплены крыло (3) на рельсах, двигатели (5), стабилизатор поворотный, механизм перемещения крыла и механизм поворота стабилизатора. Стабилизатор выполнен поворотным относительно плоскости симметрии дирижабля. Изобретение направлено на упрощение конструкции. 4 ил.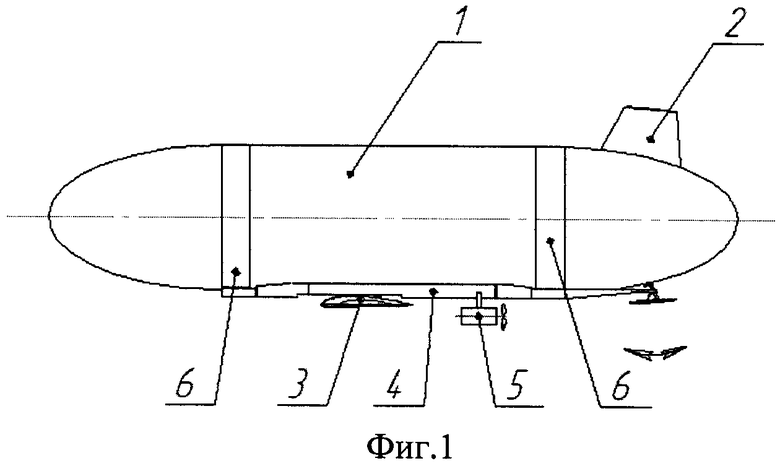
Дирижабль с подвижным крылом, содержащий аэростат, раму, крыло, киль и стабилизатор, швартовочное устройство, двигатели, отличающийся тем, что в него введены рельсы, механизм поворота стабилизатора и механизм перемещения крыла, причем крыло выполнено с возможностью перемещения по рельсам в направлении, перпендикулярном оси симметрии дирижабля, а стабилизатор выполнен поворотным относительно плоскости симметрии дирижабля.
| WO 2000048902 A1, 24.08.2000 | |||
| JP 2000168693 A, 20.06.2000 | |||
| ДИРИЖАБЛЬ | 1989 |
|
RU2009072C1 |

