Изобретение относится к области атомного машиностроения и технике эксплуатации блоков атомных станций и может быть использовано, в частности, в устройствах для демонтажа радиоактивного оборудования.
Известно устройство цангового типа для сцепления механизмов управления с регулирующим органом ядерного реактора [Емельянов И.Я., Воскобойников В.В., Масленок Б.А. Атомиздат, 1978, 272 с.с.122-123]. В этом случае устройство захвата универсального гнезда длинномерного регулирующего органа канального уран-графитового реактора отличается сложностью конструкции и нестабильностью пружинящих свойств цанг из нержавеющей стали, вследствие периодического воздействия температуры и радиоактивного облучения.
Предлагаемый полуавтоматический захват универсального гнезда длинномерного регулирующего органа канального уран-графитового реактора устраняет эти недостатки. Вместо цангового захвата с пружинящими свойствами цанг предлагается устройство с жесткими фигурными захватами-фиксаторами, установленными на несущих осях с возможностью свободного поворота.
Для достижения указанного технического результата предложено устройство в виде полуавтоматического захвата универсального гнезда, представленное на фигуре 1 в положении замкнутых захватов-фиксаторов и готовым к подъему.
На фигуре 1 показаны элементы устройства.
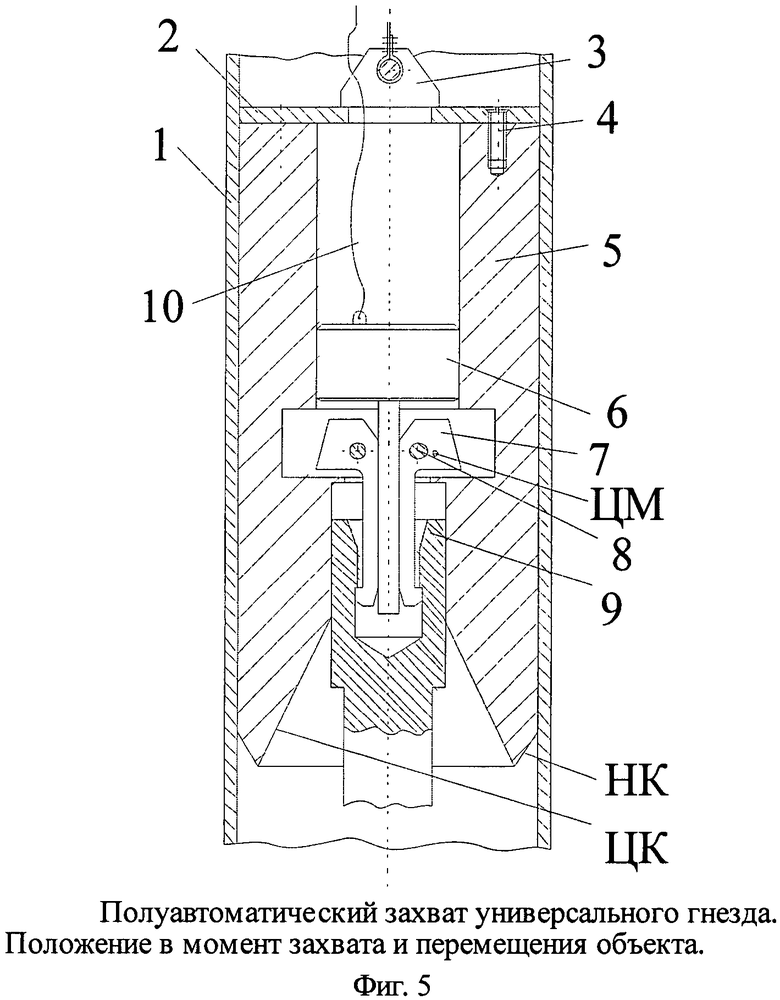
В технологической трубе 1 расположено гнездо универсальное 9 длинномерного объекта; верхняя направляющая часть гнезда имеет коническую форму, средняя часть гнезда выполнена в виде цилиндрического отверстия уменьшенного диаметра, а нижняя часть гнезда представляет цилиндрическое отверстие увеличенного диаметра; внутренняя торцевая поверхность между средней и нижней частями отверстия служит опорной базой для захватных элементов захватов-фиксаторов 7.
К корпусу 5 устройства с помощью винтов 4 присоединена крышка 2, к которой присоединена проушина 3 подсоединения к канатному подъему.
В корпусе 5 выполнено цилиндрическое отверстие, в котором по свободной посадке перемещается ползун 6 с фиксирующим штоком, геометрически замыкающим при перемещении вниз положение захватов-фиксаторов 7 в состояние захвата универсального гнезда.
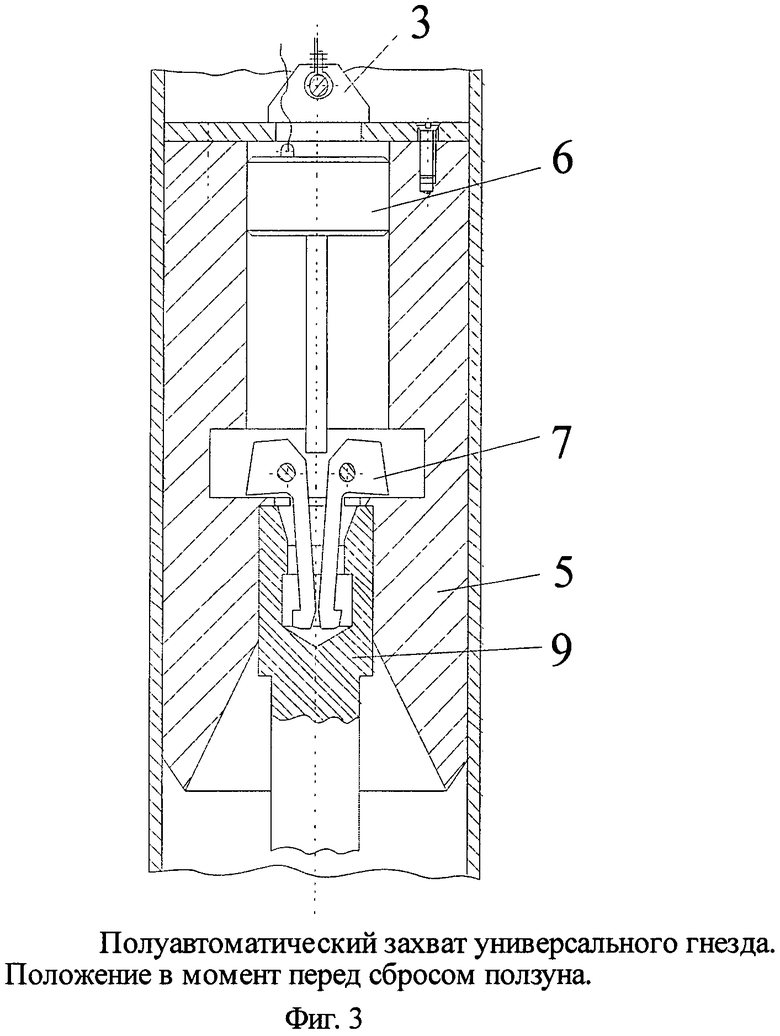
В корпусе 5 расположены несущие оси 8, на которых устанавливаются с возможностью свободного поворота захваты-фиксаторы 7. Захваты-фиксаторы 7 выполнены плоскими фигурными из пластин таким образом, чтобы центры их масс (ЦМ) обеспечивали положение, при котором моменты центра масс относительно несущих осей 8 стремятся поворачивать правый захват-фиксатор по часовой стрелке, а левый - против часовой стрелки, обеспечивая таким образом условия свободного входа захватов-фиксаторов 7 в отверстие универсального гнезда 9, как показано на фигуре 3. Захватные элементы захватов-фиксаторов 7 имеют опорные площадки для контакта с внутренней торцевой поверхностью универсального гнезда и обеспечения условий для подхвата объекта и подъема устройства вместе с длинномерным объектом.
Нижняя часть корпуса 5 имеет направляющий конус НК для обеспечения свободного входа устройства в трубу 1 и центрирующий конус ЦК для обеспечения прохода объекта - универсального гнезда 9 в центральное отверстие корпуса 5.
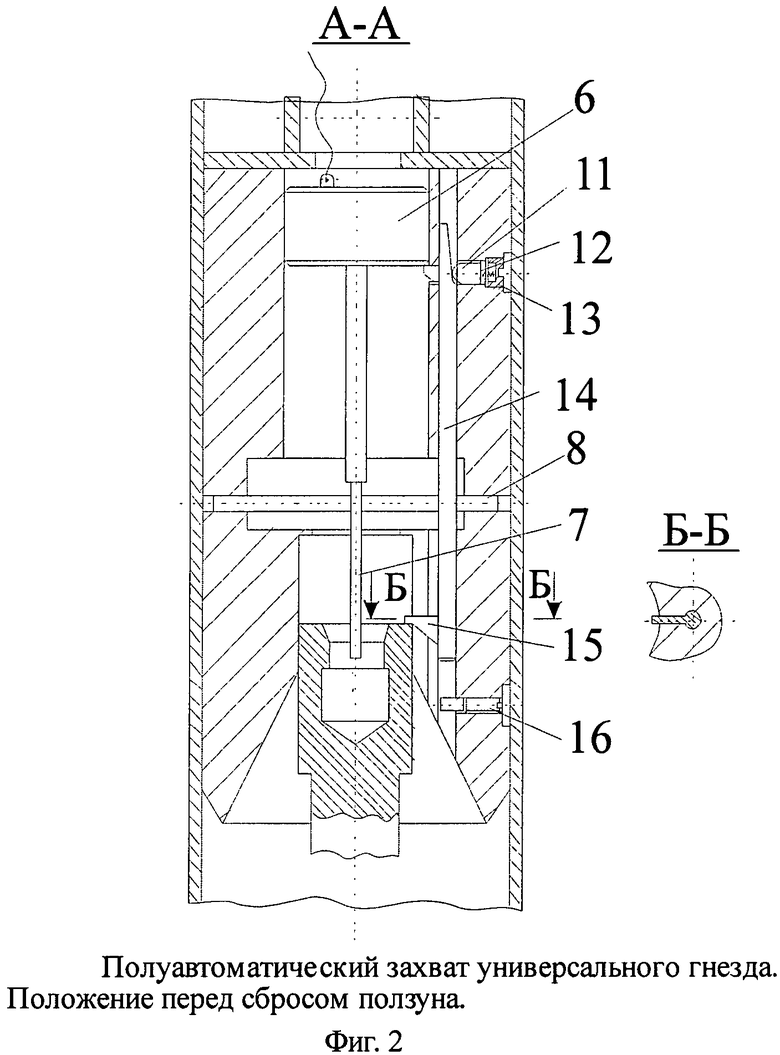
В стенке корпуса 5 выполнено цилиндрическое отверстие, в котором перемещается шток 14 с упором 15 и скосом в верхней части, взаимодействующим с ползуном-подхватом 11, который поддерживает по нижней торцевой поверхности ползун 6 и обеспечивает его сброс за счет возможности смещения вправо скосом штока 14 после контакта упора 15 штока 14 с внешней торцевой поверхностью универсального гнезда 9 и последующего опускания захвата. Усилие поступательного перемещения ползуна-подхвата 11 регулируется пружиной сжатия 12 и винтом 13, как показано на фигуре 2.
Винт опорный 16 предохраняет шток 14 от выпадения.
Цилиндрическое отверстие для штока 14 выполнено в нижней части корпуса с пазом, в котором перемещается упор 15, как представлено в сечении Б-Б на фигуре 2.
Устройство работает следующим образом.
Подвешенное на проушине 3 устройство опускается в трубу 1.
Удобство входа устройства в трубу 1 обеспечивается наличием направляющего конуса НК на корпусе 5, а центрирование объекта - универсального гнезда 9 - обеспечивается наличием центрирующего конуса ЦК на корпусе 5. На фигуре 1 представлено положение устройства в момент замыкания захватов-фиксаторов 7.
Последовательность операций срабатывания захвата объясняется с помощью фигуры 2, где представлено положение устройства перед сбросом ползуна 6.
При опускании устройства и во время всех этапов операций захвата канат 10 подъема ползуна 6 должен провисать свободно, обеспечивая возможность перемещения ползуна 6 в корпусе 5 под действием сил тяжести.
При опускании устройства ползун 6 поддерживается ползуном-подхватом 11, который подведен под нижнюю торцевую поверхность ползуна 6 под действием пружины сжатия 12, поджимаемой винтом 13.
Захваты-фиксаторы 7 в момент перед сбросом ползуна замыкающего 6 под действием указанных вращающих моментов находится в положении, представленном на фигуре 3.
Описание последующих этапов производим с помощью схемы, представленной на фигуре 2.
При опускании устройства торцевая поверхность гнезда универсального 9 входит в контакт с упором 15 и поднимает шток 14. Скос в верхней части штока 14 сдвигает ползун-подхват 11 вправо, освобождая ползун 6, который перемещается вниз и посредством фиксирующего штока в нижнем положении раздвигает и геометрически замыкает захватные элементы захватов-фиксаторов 7.
Величина хода упора 15 штока 14 рассчитывается из условия входа захватных элементов захватов-фиксаторов 7 в отверстие большого диаметра объекта перед сбросом ползуна замыкающего 6.
После сброса ползуна замыкающего 6 и геометрического замыкания штоком ползуна захватов-фиксаторов 7 в универсальном гнезде устройство будет подниматься только вместе с гнездом универсальным 9 длинномерного объекта.
Поднятый длинномерный объект вместе с устройством перемещается на требуемую технологическую позицию. За время всех операций с объектом устройство будет гарантированно удерживать объект по условию геометрического замыкания твердых тел.
Освобождение объекта можно произвести после фиксации объекта в вертикальном положении на технологической позиции. Для этого необходимо поднять ползун 6 с помощью каната 10; при этом шток фиксирующий ползуна 6 выйдет из зоны контакта с захватами-фиксаторами 7, которые окажутся в положении, представленном на фигуре 3, верхняя торцевая поверхность ползуна 6 при контакте со скосом ползуна-подхвата 11 сдвинет последний вправо, а при дальнейшем подъеме ползуна 6 ползун-подхват 11 возвратится влево под действием пружины и после ослабления натяжения каната 10 войдет в контакт с нижней торцевой поверхностью ползуна 6. При подъеме устройства захватные элементы захватов-фиксаторов 7 свободно выходят из отверстия гнезда универсального; начальное положение этого этапа представлено на фигуре 3. После освобождения объекта устройство готово к следующей операции.
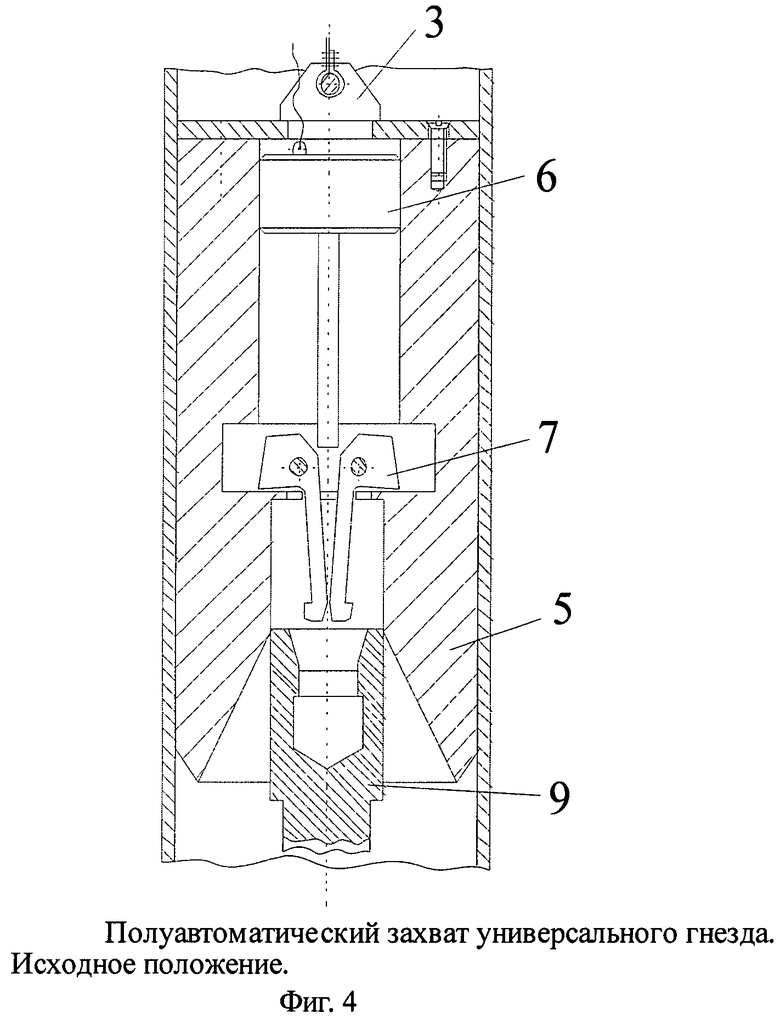
Фигуры 4 и 5 дополняют объяснение по фигурам 1, 2 и 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАРУЖНАЯ ОСВОБОЖДАЮЩАЯСЯ ТРУБОЛОВКА | 2002 |
|
RU2213201C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ВЫЕМНОГО БЛОКА | 2013 |
|
RU2547031C1 |
| Скважинное ловильное устройство | 1982 |
|
SU1051225A1 |
| Захватное устройство для изделийС ОТВЕРСТиЕМ | 1979 |
|
SU839992A1 |
| Захватное устройство к гаражному подъемнику для коробок передач и репродукторов автомобилей | 1976 |
|
SU592711A2 |
| Захватное устройство для грузов с такелажными кронштейнами | 1990 |
|
SU1736903A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ СБОРКИ ДЕТАЛЕЙ | 2010 |
|
RU2433029C1 |
| Магнитоподхватное устройство | 1990 |
|
SU1761653A1 |
| Буровой снаряд и ловитель для извлекаемого пробоприемника бурового снаряда и способ применения ловителя | 1990 |
|
SU1756532A1 |
Полуавтоматический захват универсального гнезда содержит узел подсоединения к канатному подъему, прикрепленный к крышке винтами корпус, скользящий в корпусе ползун замыкающий с фиксирующим штоком, два фигурных захвата-фиксатора на несущих осях, канат подъема ползуна замыкающего, ползун-подхват, регулируемый винтом с пружиной сжатия, шток с упором и скосом. Захваты-фиксаторы обеспечивают вход захватных элементов в отверстие объекта - универсального гнезда, подхват объекта под внутреннюю торцевую плоскость, замыкание захватных элементов захватов-фиксаторов фиксирующим штоком ползуна замыкающего. Движение ползуна замыкающего происходит при опускании устройства и контакта торцевой поверхности объекта с упором штока, а скоса штока - с ползуном-подхватом. Корпус выполнен с направляющим конусом и центрирующим конусом. Достигается надежность захвата при воздействии температуры и радиоактивного облучения. 5 ил.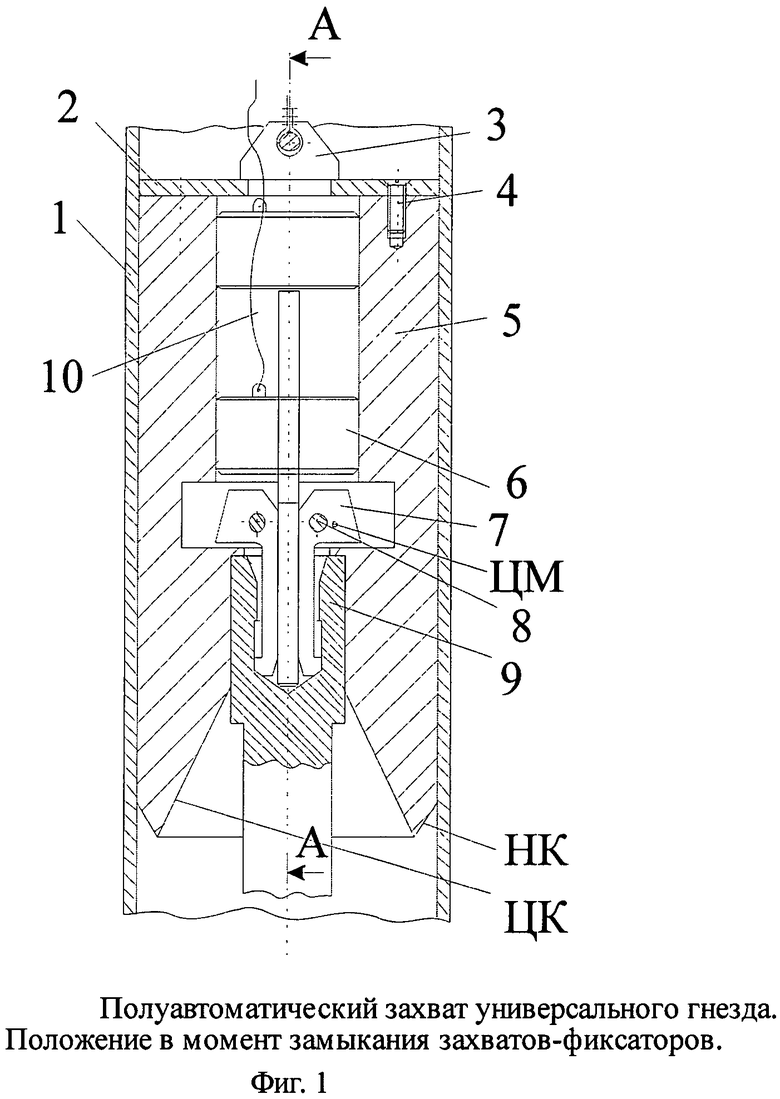
Полуавтоматический захват универсального гнезда, содержащий крышку с проушиной подсоединения к канатному подъему, винты крепления, корпус, ползун с фиксирующим штоком, фигурные захваты-фиксаторы, оси несущие, канат подъема ползуна, шток с упором и скосом, ползун-подхват с пружиной сжатия и винтом регулировочным и винт опорный, отличающийся тем, что захват-фиксатор выполнен фигурным, свободно поворачивающимся относительно несущей оси, обеспечивающим условия свободного входа его захватных элементов в отверстие универсального гнезда под воздействием вращающего момента от центра масс захвата-фиксатора относительно несущей оси, ползун с фиксирующим штоком, перемещающийся по вертикали под действием собственной силы тяжести, геометрически замыкает фиксирующим штоком захватные элементы захватов-фиксаторов в положении подхвата объекта под внутреннюю торцовую поверхность в отверстии гнезда универсального, шток с упором и скосом обеспечивает сброс ползуна при контакте упора с внешней торцовой поверхностью гнезда универсального и при контакте скоса с ползуном-подхватом, отводящим его из-под нижней торцовой поверхности ползуна, корпус выполнен с направляющим конусом и центрирующим конусом, обеспечивающими центрирование устройства в технологической трубе и объекта в центральном отверстии ползуна.
| ЗАХВАТНОЕ УСТРОЙСТВО | 2009 |
|
RU2395446C1 |
| Захват для штучных грузов | 1973 |
|
SU676533A1 |
| Захват для изделий с внутренней полостью | 1987 |
|
SU1460024A1 |
| JP 2000264575 A, 26.09.2000. | |||

