Изобретение относится к области подъемно-транспортного оборудования, а именно к автоматическим грузозахватным устройствам, предназначенным для транспортирования грузов преимущественно цилиндрической формы.
Известно грузозахватное устройство (а.с. СССР № 1301761, МПК В66С 1/66), содержащее корпус с соосно закрепленными в нем одна над другой втулками, с выполненными на обращенных друг к другу торцах копирными зубьями. Во втулках размещены подпружиненный шток и захватный орган. Устройство снабжено жестко закрепленным на штоке упором с выполненными на нем зубьями для взаимодействия с зубьями верхней втулки. Захватный орган выполнен с зубьями в верхней части для взаимодействия с зубьями нижней втулки и соединен с упором с возможностью ограниченного осевого перемещения относительно него. Шток устройства выполнен с хвостовиком, расположенным над верхней поверхностью корпуса.
К существенным недостаткам такого устройства можно отнести следующее:
- конструкция устройства не обладает универсальностью и может быть использована для транспортировки только грузов, имеющих закрепленные на них специальные штыри с головкой;
- механизм устройства, осуществляющий поворот захватного органа, обладает низкой степенью надежности, т.к. в нем отсутствует жесткая фиксация положения пазов захватного органа относительно граней головки штыря, так как фиксация осуществляется за счет сил трения, создаваемых пружиной сжатия.
Известен механизм фиксации грузозахватного устройства (а.с. СССР № 1074804, МПК В66С 1/42), содержащий корпус с фигурным пазом, имеющим упорные участки и подвижный относительно него ползун с шарнирно закрепленной на нем тягой, на свободном конце которой закреплен установленный в пазу корпуса палец. Механизм фиксации грузозахватного устройства снабжен дополнительным пальцем, размещенным в отверстии, выполненном в первом пальце, и подпружиненным относительно последнего, при этом фигурный паз выполнен с углублением для дополнительного пальца по всей его протяженности, поверхность которого имеет развертку в виде храповика с зубьями, размещенными в местах сопряжения упорных участков фигурной прорези.
Существенными недостатками такого механизма являются:
- механизм фиксации обладает низкой степенью надежности, т.к. в нем отсутствует жесткая фиксация основного пальца относительно фигурного петлеобразного паза на упорных участках. Даже применение дополнительного пальца не исключает возможность обратного хода основного пальца в пределах каждого упорного участка дополнительного паза. Отсутствие жесткой фиксации объясняется тем, что тяга закреплена на ползуне шарнирно и при работе механизма она совершает колебательные движения, копируя геометрию фигурного паза, упорные участки которого расположены относительно друг друга под различными углами, в основном под углами меньше 90°. Это приводит к нарушениям циклов работы механизма в целом, к ударным нагрузкам на звенья механизма и, как следствие, к понижению степени надежности его работы;
- сложность выполнения фигурного паза с углублением для дополнительного паза, поверхность которого выполнена в виде храповика с зубцами.
Известно грузозахватное устройство (а.с. СССР № 1624909, МПК В66С 1/66), принятое за прототип, содержащее связанный с подъемной машиной корпус, выполненный с вертикальным отверстием, расположенные в нем захватные рычаги и механизм фиксации их положений, включающий две втулки, соосно расположенные в отверстии корпуса одна под другой, выполненные с вертикальными выступами, скошенными по торцам, и пазами, расположенными между выступами, расположенный внутри втулок соосно поворотный приводной шток с выступами, выполненными с возможностью расположения в пазах верхней втулки и взаимодействия со скосами ее выступов, и пружину, связанную одним концом с верхней втулкой.
Грузозахватное устройство снабжено свободно установленным в корпусе ползуном, выполненным с вертикальным заглушенным со стороны нижнего торца соосным отверстием для расположения в нем втулок, пазы и выступы которых расположены на их внутренних поверхностях со смещением и расположением скошенных поверхностей навстречу друг другу, при этом другой конец пружины, выполненной в виде пружины кручения, закреплен на нижней втулке, захватные рычаги шарнирно закреплены в нижней части ползуна, а выступы закреплены на боковой части штока с возможностью расположения в пазах нижней втулки, взаимодействия со скошенными торцами ее выступов и выполнены с длиной не менее расстояния между основаниями скошенных поверхностей. В нижней втулке устройства все пазы выполнены сквозными, а в верхней втулке сквозные пазы выполнены поочередно с глухими.
Недостатками такого грузозахватного устройства являются:
- конструкция устройства не обладает универсальностью и может быть использована для транспортировки только грузов, имеющих закрепленные на них специальные штыри с головкой;
- устройство имеет узлы, механизмы которых отличаются сложной кинематикой, из-за наличия большого количество деталей взаимодействующих между собой;
- наличие ненадежного элемента устройства - пружины кручения, предназначенной для возврата в исходное положение втулки, установленной в подшипниках, относительно верхней втулки. При возникновении значительных по величине сил трения в подшипниковом узле нижней втулки или при уменьшении жесткости пружины механизм фиксации положений захватных рычагов может давать сбои в работе - что значительно уменьшает степень надежности работы устройства.
Задачей настоящего изобретения является создание автоматического грузозахватного устройства простой конструкции с повышенной надежностью механизма фиксации захвата.
Поставленная задача решается тем, что в автоматическом захвате, содержащем связанный с грузоподъемным механизмом корпус, захватные рычаги, механизм фиксации их положений, включающий две соосно расположенные одна под другой втулки, выполненные с вертикальными выступами, скошенными по торцам, и пазами, расположенными между выступами, и размещенный соосно внутри втулок шток, корпус выполнен в виде рамы, на которой шарнирно закреплены образующие клещевые захваты захватные рычаги, связанные через шарнирные тяги с траверсой. На нижнем конце штока равномерно по окружности выполнены глухие продольные пазы, вскрытые в верхней части кольцевой радиусной канавкой. Верхний конец штока закреплен на траверсе. Механизм фиксации снабжен закрепленным на раме полым цилиндрическим корпусом. Внутри полого цилиндрического корпуса неподвижно закреплены втулки механизма фиксации, при этом выступы одной втулки расположены напротив пазов другой. Между втулками соосно с возможностью поступательного перемещения и поворота относительно штока размещена промежуточная втулка с расположенными на торцах вертикальными пазами и выступами, скошенными по торцам. Выступы выполнены с возможностью расположения в пазах неподвижных втулок без смещения противолежащих выступов. Скошенные поверхности выступов промежуточной втулки совпадают по направлению со скосами противолежащих выступов неподвижных втулок. В средней части промежуточной втулки выполнены равномерно расположенные по окружности отверстия с размещенными в них телами качения в виде шариков, взаимодействующими с внутренними поверхностями глухих продольных пазов и кольцевой радиусной канавки штока, и кольцевой расточки, выполненной на внутренней поверхности полого цилиндрического корпуса. Ширина глухих продольных пазов штока равна сумме ширин паза и выступа подвижной втулки, глубины глухих продольных пазов, кольцевой радиусной канавки и кольцевой расточки выполнены одинаковыми, а высота кольцевой расточки выбрана из условия обеспечения достаточного разведения и сведения захватных рычагов.
Автоматический захват снабжен опорами, жестко закрепленными на траверсе, вертикальные стойки которых выполняют роль центратора.
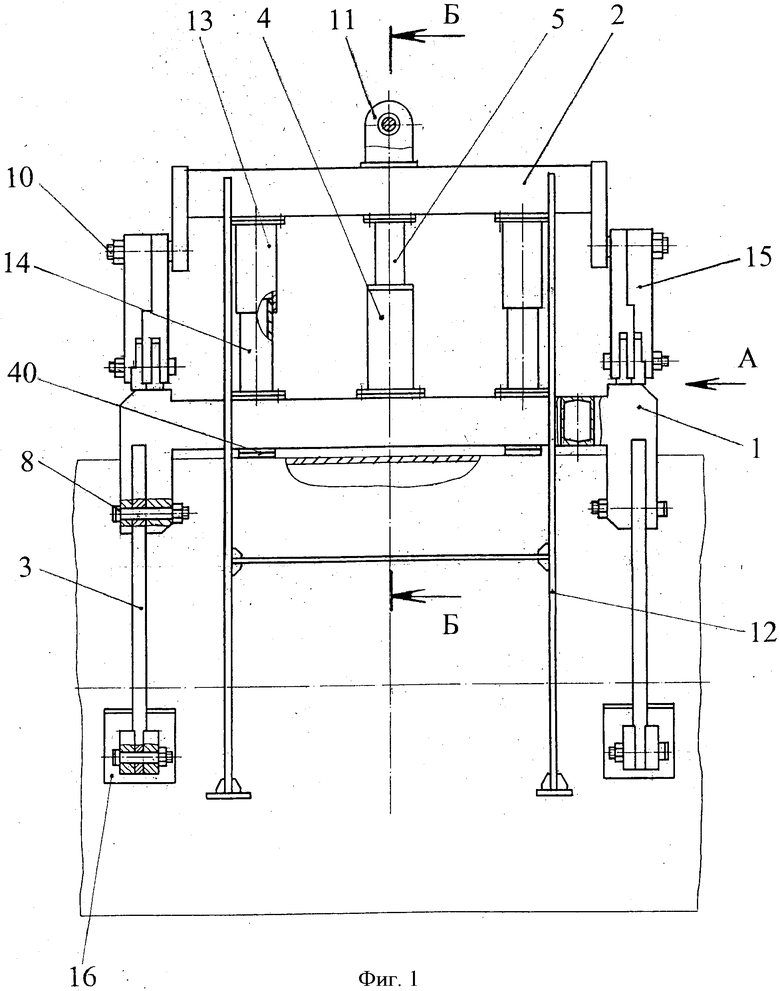
На фиг.1 показан общий вид автоматического захвата в момент транспортировки зафиксированного груза.
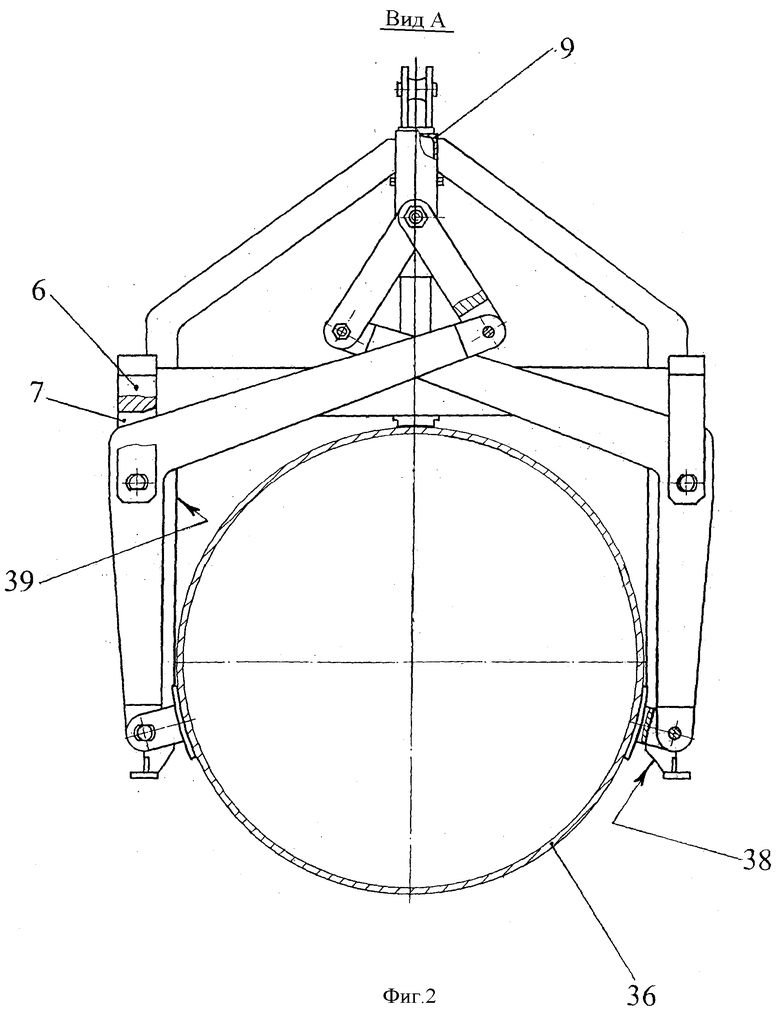
На фиг.2 - вид А на фиг.1.
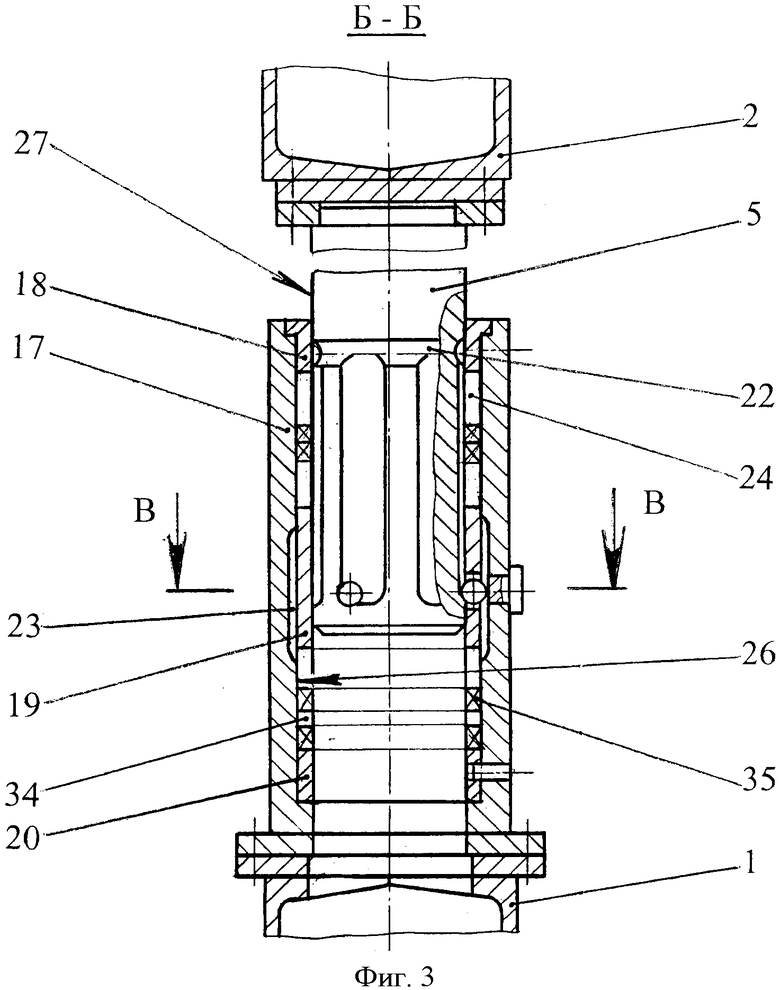
На фиг.3 - сечение Б-Б на фиг.1.
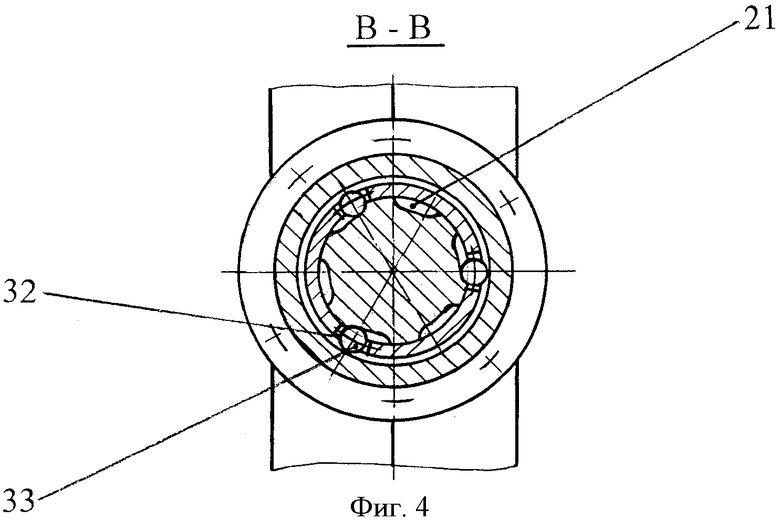
На фиг.4 - сечение В-В на фиг.3.
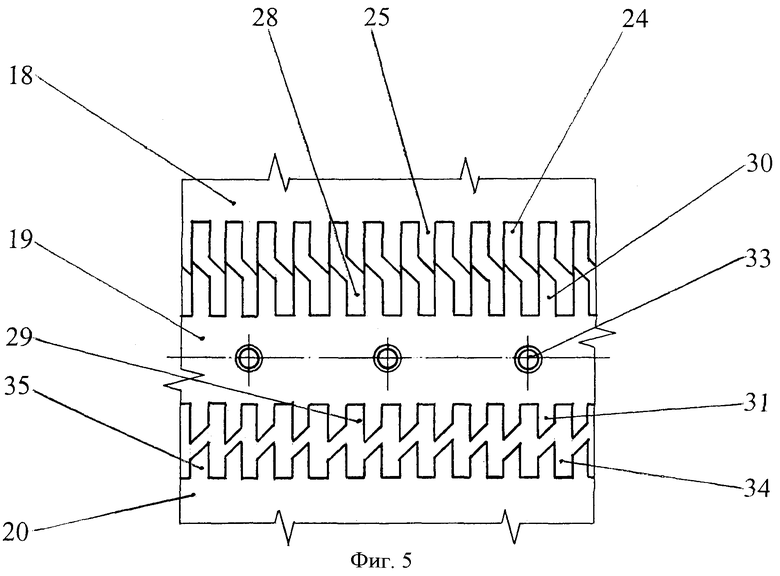
На фиг.5 - развертка взаимного расположения выступов и пазов промежуточной и неподвижных втулок автоматического захвата.
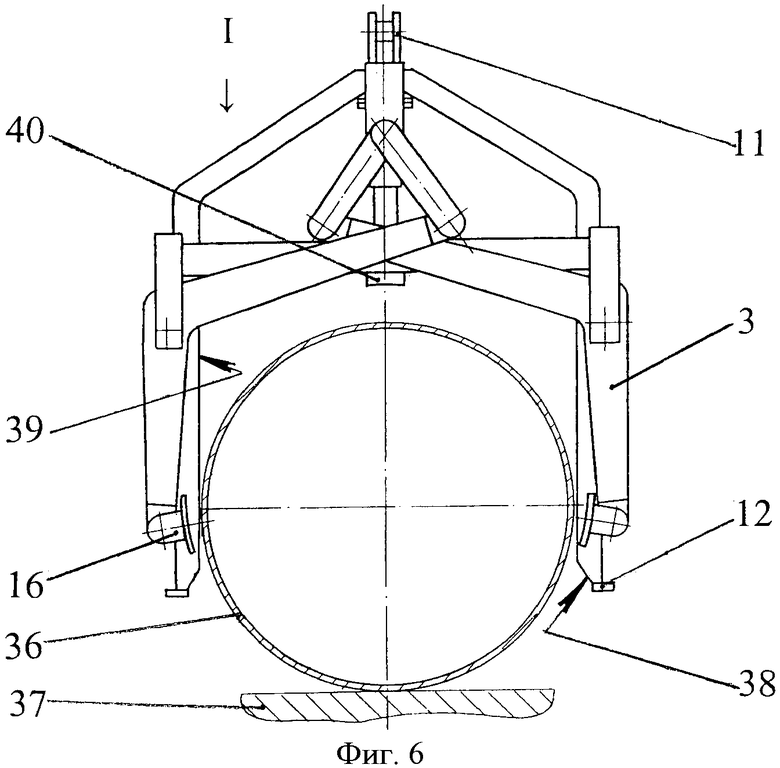
На фиг.6 - взаимное расположение элементов автоматического захвата в положении I.
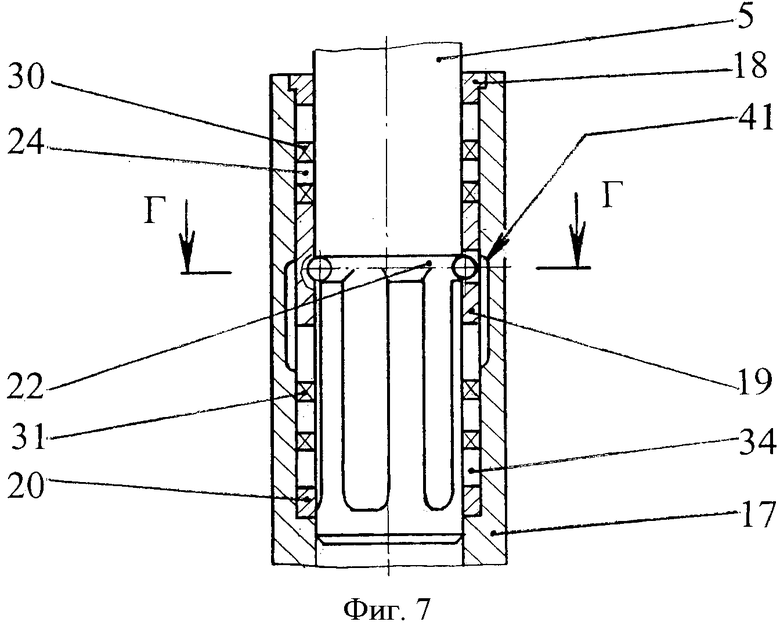
На фиг.7 - взаимное расположение элементов механизма фиксации в положении I.
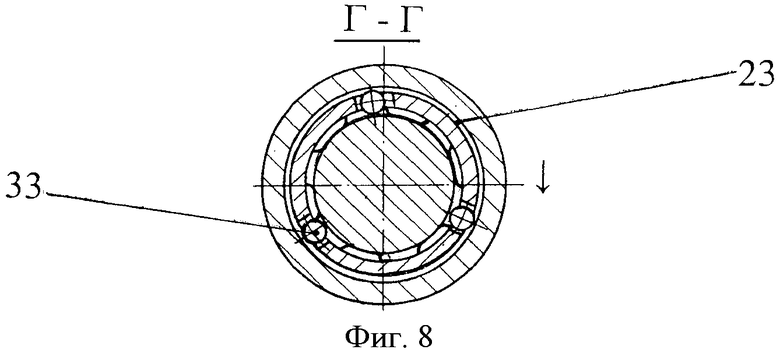
На фиг.8 - сечение Г-Г на фиг.7.
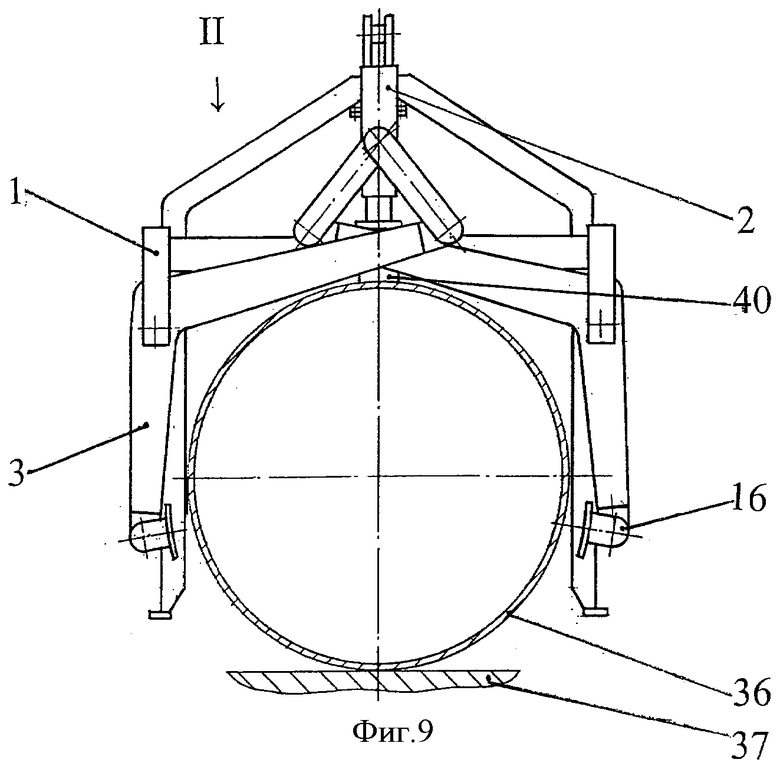
На фиг.9 - взаимное расположение элементов автоматического захвата в положении II.
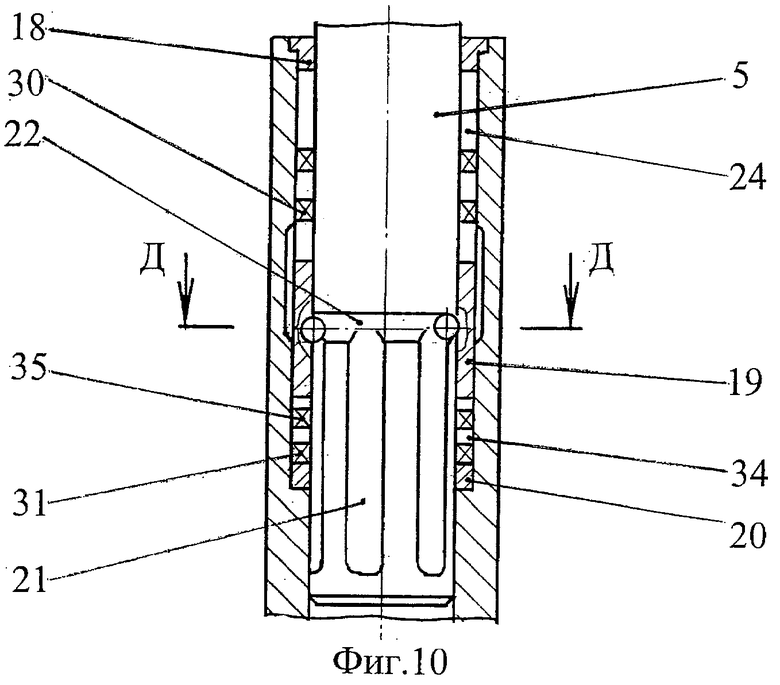
На фиг.10 - взаимное расположение элементов механизма фиксации в положении II.
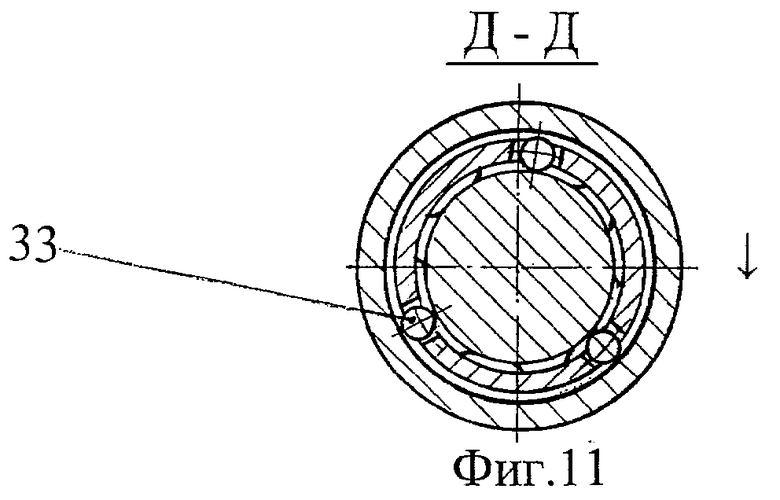
На фиг.11 - сечение Д-Д на фиг.10.
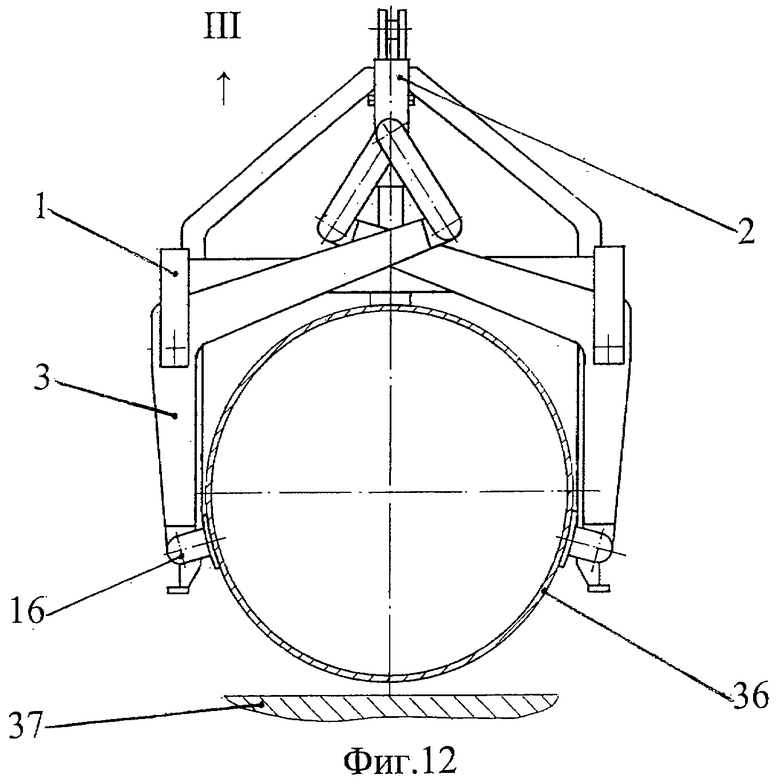
На фиг.12 - взаимное расположение элементов автоматического захвата в положении III.
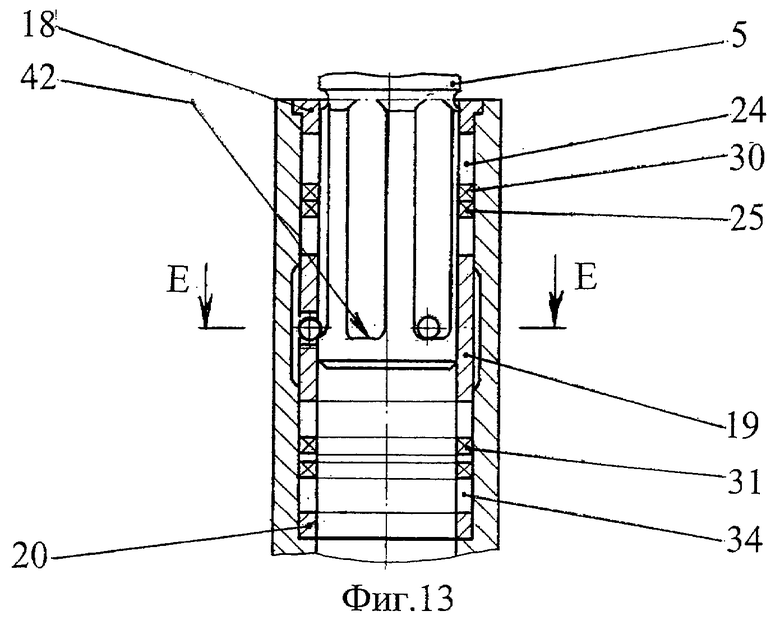
На фиг.13 - взаимное расположение элементов механизма фиксации в положении III.
На фиг.14 - сечение Е-Е на фиг.13.
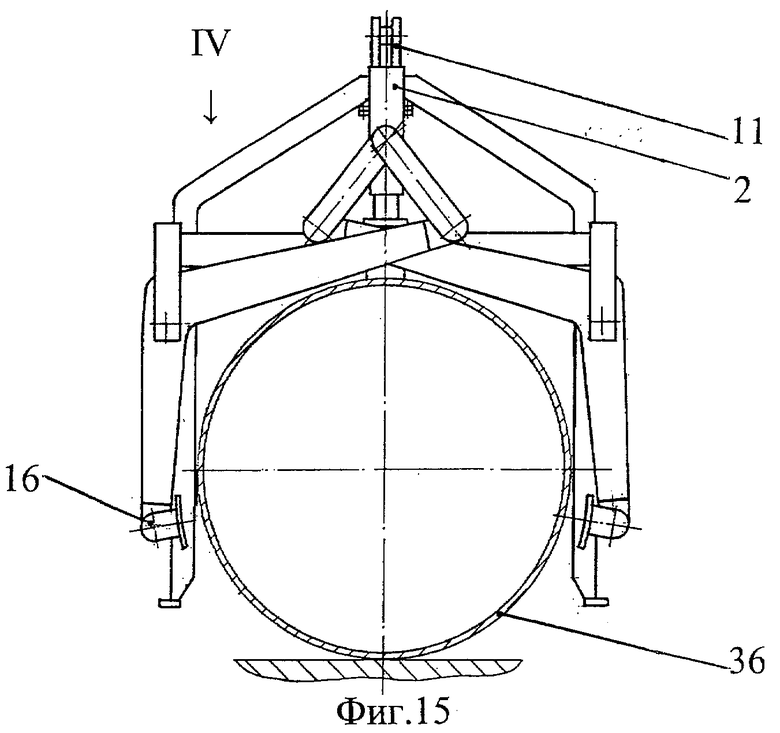
На фиг.15 - взаимное расположение элементов автоматического захвата в положении IV.
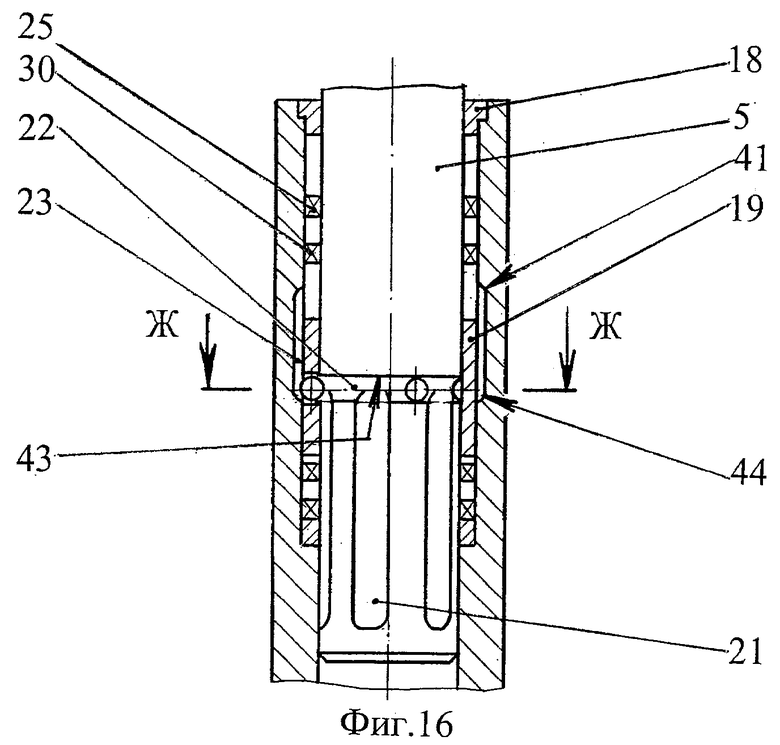
На фиг.16 - взаимное расположение элементов механизма фиксации в положении IV.
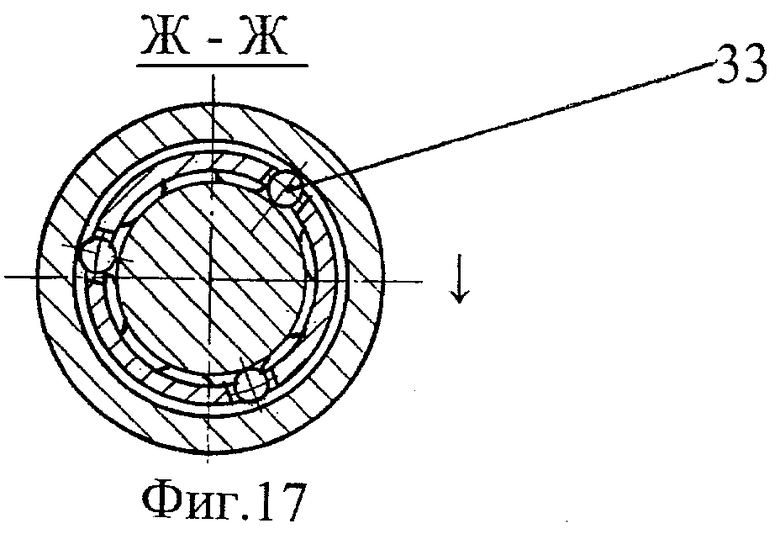
На фиг.17 - сечение Ж-Ж на фиг.16.
Автоматический захват содержит корпус 1, подвесную траверсу 2, захватные рычаги 3, механизм фиксации 4 захватных рычагов, шток 5 (см. фиг.1).
Корпус 1 выполнен в виде Н-образной рамы, сваренной из коробчатых балок, на концах которых установлены бобышки 6 с пазами 7 (см. фиг.2), в которых шарнирно на осях 8 установлены захватные рычаги 3, образующие клещевые захваты.
Траверса 2 выполнена в виде балки 9 коробчатой формы, на концах которой установлены оси 10 для шарнирного крепления шарнирных тяг 15.
На верхней части траверсы 2 закреплена серьга 11, при помощи которой автоматический захват навешивается на крюк грузоподъемного механизма. К боковым поверхностям балки 9 жестко прикреплены вертикальные стойки опор 12.
На нижней части балки 9 установлены наружные телескопические направляющие 13, взаимодействующие с внутренними телескопическими направляющими 14, закрепленными на корпусе 1.
На нижних плечах захватных рычагов 3 шарнирно установлены подхватные лапы 16. Верхние плечи каждого захватного рычага через шарнирные тяги 15 связаны с траверсой 2.
Механизм фиксации 4 содержит полый цилиндрический корпус 17, размещенные в нем соосно одна над другой две неподвижно закрепленные втулки 18 и 20 и промежуточную втулку 19. Внутри втулок 18, 19 и 20 соосно размещен шток 5, жестко закрепленный верхним концом на траверсе 2 (см. фиг.1, 3).
На нижнем конце штока 5 выполнены глухие продольные пазы 21, равномерно расположенные на поверхности штока. Верхние концы продольных глухих пазов вскрыты кольцевой радиусной канавкой 22.
Боковые и торцевые поверхности глухих продольных пазов 21 выполнены радиусными радиусом, равным радиусу кольцевой канавки.
На внутренней поверхности полого цилиндрического корпуса 17 выполнена кольцевая расточка 23, торцы которой выполнены радиусными. Втулка 18 выполнена с пазами 24 и скошенными по торцам выступами 25, равномерно расположенными по окружности, и жестко закреплена в верхней части корпуса 17. Втулка 20 выполнена с пазами 34 и скошенными по торцам выступами 35, равномерно расположенными по окружности, и жестко закреплена в нижней части корпуса 17. Промежуточная втулка 19 установлена между неподвижными втулками 18 и 20 с возможностью поступательного перемещения и поворота относительно цилиндрической поверхности 26 корпуса 17 и цилиндрической поверхности 27 штока 5.
На торцах промежуточной втулки 19 выполнены расположенные напротив друг друга пазы 28, 29 и выступы 30, 31, скошенные по торцам. В средней части промежуточной втулки выполнены отверстия 32, в которых размещены тела качения - шарики 33.
Скосы выступов 30 и выступов 31 промежуточной втулки выполнены под углом 45° и противоположено направлены.
Скосы выступов 35 выполнены под углом 45° и по направлению совпадают с направлением скосов выступов 31. Скосы выступов 25 выполнены также под углом 45° и по направлению совпадают с направлением скосов выступов 30. Втулки 18 и 20 ориентированы таким образом, чтобы пазы 24 втулки 18 были расположены напротив выступов 35 втулки 20.
Ширина глухих продольных пазов 21 равна сумме ширин паза 29 и выступа 31 промежуточной втулки 19. Количество выступов любой из втулок 18 и 20 равно количеству глухих продольных пазов 21. При этом расстояние между вершинами скосов выступов 25 втулки 18 и противолежащими вершинами скосов выступов 35 втулки 20 меньше расстояния между вершинами противолежащих скосов выступов 30 и 31 промежуточной втулки 19. Глубины глухих продольных пазов 21, кольцевой радиусной канавки 22 и кольцевой расточки 23 выполнены одинаковыми и выбраны из условия обеспечения возможности одновременного контакта шариков 33 либо с кольцевой расточкой 23 и кольцевой радиусной канавкой 22, либо с кольцевой расточкой 23 и глухими продольными пазами 21, в зависимости от их взаимного расположения. Высота кольцевой расточки 23 выбрана из условия обеспечения достаточного разведения и сведения захватных рычагов.
Работа автоматического захвата характеризуется четырьмя последовательными положениями I, II, III, IV. Первоначальное положение автоматического захвата (фиг.6) - положение хранения автоматического захвата и установки его на груз 36. При хранении автоматический захват установлен опорами 12 на площадке для хранения 37.
Для работы с грузом 36, положение I, автоматический захват навешивают через серьгу 11 на крюк грузоподъемного механизма, перемещают в зону хранения груза и вывешивают над грузом. При этом механизм фиксации 4 обеспечивает такое положение захватных рычагов 3 и, соответственно, подхватных лап 16, при котором расстояние между парными лапами больше ширины груза 36.
Вывешенный над грузом 36 автоматический захват опускают вниз, при этом центрирование автоматического захвата относительно груза 36 обеспечивается выполненными на конус заходными фасками 38 и поверхностями 39 опор 12. Автоматический захват опускают вниз до касания упоров 40 поверхности груза 36.
Элементы механизма фиксации захватных рычагов находятся в следующих положениях (фиг.7, фиг.8). Шарики 33 расположены в кольцевой радиусной канавке 22 и в то же время контактируют с верхней торцевой поверхностью 41 кольцевой расточки 23.
Таким образом, обеспечивается жесткая связь через шарики 33 между штоком 5 и полым цилиндрическим корпусом 17.
Такое взаимное расположение штока 5, шариков 33 и полого цилиндрического корпуса 17 соответствует раскрытию захватных рычагов 3 с обеспечением гарантированного зазора между грузом 36 и подхватными лапами 16. В этом положении выступы 30 промежуточной втулки 19 расположены в пазах 24 втулки 18.
При переходе автоматического захвата из положения I в положение II (фиг.9) продолжают опускать автоматический захват и корпус 1 упорами 40 ложится на груз 36. Под действием собственного веса траверса 2 перемещается вниз. Шток 5 также перемещается вниз вместе с промежуточной втулкой 19.
При этом выступы 30 промежуточной втулки 19 выходят из зацепления с пазами 24 втулки 18, скосы выступов 31 контактируют со скосами выступов 35 втулки 20 и при дальнейшем перемещении вниз промежуточная втулка 19 проворачивается относительно общей продольной оси механизма фиксации по часовой стрелке (фиг.11). Выступы 31 промежуточной втулки 19 заходят в пазы 34 втулки 20.
Проворачиваясь вместе с промежуточной втулкой 19, шарики 33 занимают в кольцевой радиусной канавке 22 положение над левой боковой поверхностью глухих продольных пазов 21 (фиг.11).
При переходе автоматического захвата из положения II в положение III (фиг.12) происходит захват подхватными лапами 16 груза 36. Траверсу 2 грузоподъемным устройством поднимают вверх. Шток 5 механизма фиксации также поднимается вверх. Так как шарики 33 находятся в зоне глухих продольных пазов 21, шток свободно перемещается вверх до упора шариков 33 в торцевые поверхности 42 глухих продольных пазов 21.
При дальнейшем подъеме штока 5 шарики 33 с промежуточной втулкой 19 также перемещаются вверх относительно кольцевой расточки 23. Выступы 31 промежуточной втулки 19 выходят из зацепления с пазами 34 втулки 20, а скосы выступов 30 входят в контакт со скосами выступов 25 втулки 18. Промежуточная втулка 19 проворачивается относительно продольной оси механизма фиксации, шарики 33 проворачиваются в продольных глухих пазах 21 и занимают в них крайнее правое положение (фиг.14). Выступы 30 промежуточной втулки 19 заходят в пазы 24 втулки 18.
При дальнейшем подъеме траверсы 2 захватные рычаги 3 проворачиваются и подхватные лапы 16 обхватывают груз 36. Груз готов для транспортировки.
После транспортировки автоматическим захватом к месту хранения груз 36 устанавливают на площадку для хранения 37. В положении IV (фиг.15) крюк грузоподъемного механизма опускают вниз, при этом под собственным весом опускается траверса 2 со штоком 5, шарики 33 перемещаются в глухих продольных пазах 21 до упора в верхнюю радиусную поверхность 43 кольцевой радиусной канавки 22, после чего промежуточная втулка 19 начинает перемещаться вниз.
Выступы 30 промежуточной втулки 19 выходят из пазов 24 втулки 18, а скосы выступов 31 входят в контакт со скосами выступов 35 втулки 20 и при дальнейшем перемещении промежуточной втулки 19 она проворачивается относительно продольной оси механизма фиксации, шарики 33 проворачиваются в кольцевой радиусной канавке 22 и занимают фиксированное положение в ней между глухими продольными пазами 21 (фиг.17).
При дальнейшем движении штока 5 вниз зафиксированные на штоке шарики 33 упираются в торцевую радиусную поверхность 44 кольцевой расточки 23, происходит жесткая фиксация штока 5 относительно корпуса 17 (фиг.16). Шток 5 занимает крайнее нижнее положение. Траверса 2, воздействуя через шарнирные тяги 15 на захватные рычаги 3, обеспечивает максимально раскрытие рычагов 3 с обеспечением гарантированных зазоров между прижимными лапами 16 и грузом 36. Положение IV является положением, при котором осуществляется хранение автоматического захвата в нерабочем состоянии. При переводе из положения IV в первоначальное положение I крюк грузоподъемного механизма (крана) устанавливают на серьгу 11 траверсы 2 и поднимают захват.
При этом (см. фиг.6, 7, 8, 15, 16, 17) шток 5, промежуточная втулка 19 с шариками 33 перемещаются вверх, скосы верхних выступов 30 промежуточной втулки 19 входят в контакт со скосами выступов 25 втулки 18 и при дальнейшем перемещении промежуточной втулки 19 она проворачивается относительно продольной оси механизма фиксации. Шарики 33 перемещаются по кольцевой радиусной канавке 22 и занимают положение, соответствующее расположению шариков 33 в положении I.
Для захвата и транспортировки следующего груза цикл повторяют по положениям от I до IV.
Заявленное устройство - автоматический захват, содержит простой по конструкции, надежный, универсальный механизм фиксации положений захватных рычагов, который выполнен отдельным узлом и может быть применен на захватах различной конструкции, что расширяет область применения автоматических захватов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1988 |
|
SU1624909A1 |
| Револьверная головка | 1988 |
|
SU1696158A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ФИГУРНОЙ ГОЛОВКОЙ | 1991 |
|
RU2034770C1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ | 1993 |
|
RU2072958C1 |
| Автоматический захват для грузов с фигурной головкой | 1988 |
|
SU1625808A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ФИГУРНОЙ ГОЛОВКОЙ | 1998 |
|
RU2157786C2 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |

Изобретение относится к области подъемно-транспортного оборудования, а именно к автоматическим грузозахватным устройствам, предназначенным для транспортирования грузов преимущественно цилиндрической формы. Автоматический захват содержит связанный с грузоподъемным механизмом корпус, захватные рычаги, механизм фиксации их положений, включающий две соосно расположенные одна под другой втулки, выполненные с вертикальными выступами, скошенными по торцам, и пазами, расположенными между выступами, и размещенный соосно внутри втулок шток. Корпус выполнен в виде рамы, на которой шарнирно закреплены образующие клещевые захваты захватные рычаги, связанные через шарнирные тяги с траверсой. На нижнем конце штока равномерно по окружности выполнены глухие продольные пазы, вскрытые в верхней части кольцевой радиусной канавкой. Верхний конец штока закреплен на траверсе. Механизм фиксации снабжен закрепленным на раме полым цилиндрическим корпусом. Внутри полого цилиндрического корпуса неподвижно закреплены втулки механизма фиксации. Между втулками соосно с возможностью поступательного перемещения и поворота относительно штока размещена промежуточная втулка. Выступы выполнены с возможностью расположения в пазах неподвижных втулок без смещения противолежащих выступов. В средней части промежуточной втулки выполнены равномерно расположенные по окружности отверстия с размещенными в них телами качения в виде шариков, взаимодействующими с внутренними поверхностями глухих продольных пазов и кольцевой радиусной канавки штока, и кольцевой расточки, выполненной на внутренней поверхности полого цилиндрического корпуса. Достигается простота, надежность и универсальность конструкции. 1 з.п. ф-лы, 17 ил.
1. Автоматический захват, содержащий связанный с грузоподъемным механизмом корпус, захватные рычаги, механизм фиксации их положений, включающий две соосно расположенные одна под другой втулки, выполненные с вертикальными выступами, скошенными по торцам, и пазами, расположенными между выступами, и размещенный соосно внутри втулок шток, отличающийся тем, что корпус выполнен в виде рамы, на которой шарнирно закреплены образующие клещевые захваты захватные рычаги, связанные через шарнирные тяги с траверсой, на нижнем конце штока равномерно по окружности выполнены глухие продольные пазы, вскрытые в верхней части кольцевой радиусной канавкой, верхний конец штока закреплен на траверсе, механизм фиксации снабжен закрепленным на раме полым цилиндрическим корпусом, внутри которого неподвижно закреплены втулки механизма фиксации, при этом выступы одной втулки расположены напротив пазов другой, а между ними соосно с возможностью поступательного перемещения и поворота относительно штока размещена промежуточная втулка с расположенными на торцах вертикальными пазами и выступами, скошенными по торцам, выполненными с возможностью расположения в пазах неподвижных втулок без смещения противолежащих выступов, при этом скошенные поверхности последних совпадают по направлению со скосами противолежащих выступов неподвижных втулок, а в средней части промежуточной втулки выполнены равномерно расположенные по окружности отверстия с размещенными в них телами качения в виде шариков, взаимодействующих с внутренними поверхностями глухих продольных пазов и кольцевой радиусной канавки штока, и кольцевой расточки, выполненной на внутренней поверхности полого цилиндрического корпуса, при этом ширина глухих продольных пазов штока равна сумме ширины паза и выступа подвижной втулки, глубины глухих продольных пазов, кольцевой радиусной канавки и кольцевой расточки выполнены одинаковыми, а высота кольцевой расточки выбрана из условия обеспечения достаточного разведения и сведения захватных рычагов.
2. Автоматический захват по п.1, отличающийся тем, что он снабжен опорами, жестко закрепленными на траверсе, вертикальные стойки которых выполняют роль центратора.
| Грузозахватное устройство | 1988 |
|
SU1624909A1 |
| Грузозахватное устройство для загрузки ряда заготовок в печь графитации | 1990 |
|
SU1796579A1 |
| Устройство для автоматической разгрузки энергетической системы при понижении частоты | 1952 |
|
SU119221A1 |

