Область техники
Данное техническое решение относится к области компьютерной технологии в военном деле, а именно к зенитным ракетным комплексам ближнего действия, использующим управляемые ракеты с пассивной системой самонаведения.
Уровень техники
Основными средствами в структуре современной ПВО для организации отражения средств воздушного нападения являются мобильные зенитные ракетные комплексы (ЗРК).
Аналогом заявляемого технического решения является зенитный ракетный комплекс 9К35 «Стрела-10СВ». Введение в комплекс «Стрела-10СВ» аппаратуры оценки зоны пуска 9С86, автоматически вырабатывающей данные для отработки требуемых углов упреждения, позволило своевременно осуществлять пуски ракет. Ее основу составлял когерентно-импульсный радиодальномер миллиметрового диапазона волн, обеспечивавший определение дальности до цели с максимальной ошибкой не более 100 м и радиальной скорости цели с максимальной ошибкой не более 30 м/с.
Недостатком комплекса является невысокая точность определения местоположения цели в пространстве и приближенное определения момента пуска ракеты относительно пространственных зон пуска.
Другим аналогом заявляемого технического решения является «Система управления ракетой самоходного зенитного комплекса» (патент на изобретение RU 2102686 С1, заявка 3176650 от 25.12.1995, МПК6 F41G 7/28, патентообладатель Научно-исследовательский электромеханический институт, опубликовано 20.01.1998),
1. содержащая радиолокатор сопровождения цели, имеющий общую ось вращения по азимуту с пусковой установкой, на котором подвижно установлен радиолокатор сопровождения радиоответчика, включающий антенну, приемник, следящие системы, имеющие ограниченные углы поворота, и передатчик запросных сигналов и команд на ракету, снабженную последовательно соединенными приемником, дешифратором, автопилотом и органами управления, радиоответчиком, подключенным к дешифратору, отличающаяся тем, что, с целью обеспечения ближней границы зоны поражения при увеличении боезапаса ракет, размещаемых на пусковой установке самоходного зенитного комплекса, за счет вертикального расположения направляющих пусковой установки, в нее введены вычислитель углов склонения, запоминающий элемент, радиомаяк, пеленгатор радиомаяка, определитель рассогласований, коммутатор и устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчика, причем вычислитель углов склонения связан входом с радиолокатором сопровождения цели, а выходом с запоминающим элементом в автопилоте ракеты, на которой размещен радиомаяк, а пеленгатор радиомаяка, определитель рассогласований и коммутатор соединены последовательно, при этом устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчика соединены входом с выходом пеленгатора радиомаяка, а определитель рассогласований связан входом с выходом следящих систем радиолокатора сопровождения радиоответчика, подключенных входами через коммутатор к собственному приемнику и пеленгатору радиомаяка.
2. Система по п.1, отличающаяся тем, что вычислитель углов склонения состоит из двух каналов, каждый из которых содержит последовательно включенный умножитель и сумматор, при этом первые входы умножителей первого и второго каналов соответственно подключены к датчикам угломестной и азимутальной угловых скоростей радиолокатора сопровождения цели, а вторые входы к датчику постоянного сигнала времени автономного полета, вторые входы сумматоров соединены с датчиками угла места и азимута радиолокатора сопровождения цели, а третьи входы сумматоров с датчиками угла возвышения и полного угла горизонтального наведения пусковой установки.
3. Система по п.1, отличающаяся тем, что радиомаяк выполнен в виде последовательно включенных кварцевого генератора, компаратора и делителя частоты, подключенного выходом к блокинг-генератору радиоответчика.
4. Система по п.1, отличающаяся тем, что пеленгатор радиомаяка содержит моноконическую антенно-волноводную систему с трехканальным облучателем рупорного типа, связанным с модулятором и сумматором коаксиальными кабелями, двухканальный приемник и следящие приводы, при этом модулятор антенно-волноводной системы выполнен в виде электронного коммутатора, подключенного к генератору прямоугольных импульсов частоты порядка 100 500 Гц.
5. Система по п.1, отличающаяся тем, что определитель рассогласований состоит из двух каналов, каждый из которых содержит последовательно соединенные сумматор, определитель модуля и схему сравнения и подключен к выходной схеме совпадений, связанной третьим входом через схему сравнения с выходом приемника радиолокатора сопровождения радиоответчика, при этом выходы следящих систем подключены к первым входам сумматоров, подключенных вторыми входами к выходам пеленгатора радиомаяка, связанным через последовательно соединенные определитель модуля и схему сравнения с четвертым и пятым входами выходной схемы совпадений.
6. Система по п.1, отличающаяся тем, что антенна радиолокатора сопровождения радиоответчика выполнена в виде малоэлементной фазированной решетки, а устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчка содержит набор датчиков постоянных напряжений, подключаемых к входам усилителей мощности, подключенных выходами к управляющим обмоткам фазовращателей фазированной антенной решетки, при этом величины напряжений датчиков соответствуют ступенчатой аппроксимации параболы, симметричной относительно центрального элемента набора.
В системе используется телеуправляемая ЗУР 9М331. Для определения момента пуска ракеты используется вхождение цели в зону поражения, а наведение ракеты на цель выполняется при одновременной работе станции сопровождения цели и станция наведения ракеты.
Недостатком является необходимость активного использования радиолокатора сопровождения цели и радиолокатора сопровождения радиоответчика после пуска ракеты, что снижает защищенность комплекса при ведении боевой работы.
Наиболее близким аналогом (прототипом) данного предполагаемого изобретения является ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС (патент на изобретение RU 2241193 C1, заявка 2002106240 от 12.03.2002, МПК7 F41F 3/04, F41H 11/02, F41G 7/20, патентообладатель Федеральное государственное унитарное предприятие Саратовский агрегатный завод (RU), опубликовано 27.11.2004),
1. содержащий установленную на носителе вращающуюся башню, размещенную на башне пусковую установку с ракетами, средства наведения пусковой установки на цель, пассивную инфракрасную станцию, цифровой вычислитель, блок выделения координат и пульт управления, отличающийся тем, что ракеты снабжены головками самонаведения, приемник инфракрасной станции установлен на пусковой установке, выполнен с возможностью кругового обзора и соединен с блоком выделения координат, выход которого соединен с входом цифрового вычислителя, выходы которого соединены с аппаратурой запуска ракет и средствами наведения пусковой установки на цель, второй вход цифрового вычислителя соединен с пультом управления.
2. Комплекс по п.1, отличающийся тем, что пульт управления выполнен съемно-выносным для дистанционного управления боевой работой комплекса.
3. Комплекс по п.1 или 2, отличающийся тем, что он снабжен средствами связи для передачи координат целеуказания с цифрового вычислителя на несколько зенитных ракетных комплексов, которые не снабжены средствами обнаружения целей.
4. Комплекс по любому из пп.1-3, отличающийся тем, что пульт управления через цифровой вычислитель связан с несколькими зенитными ракетными комплексами для одновременного управления ими.
Пуск ракеты выполняется после наведения ракеты на цель, выбранную цифровым вычислителем по дальности до цели и скорости ее движения. Сигнал пуска ракеты подается с пульта управления через цифровой вычислитель в аппаратуру запуска ракеты после получения сигнала от ракеты о захвате цели и ее удержании.
Недостатком прототипа является недостаточная точность определения возможности пуска и времени пуска ракеты для быстролетящей цели, так как для успешного пуска сигнал захвата и удержание цели ракетой должен сопровождаться информацией о положении цели относительно пространственной зоны пуска в зависимости от скорости цели, высоты полета цели, азимута цели и параметра траектории цели.
Сущность изобретения
Известен способ пуска ракет для подвижных пусковых установок с использованием текущих координат цели в прямоугольной системе координат 0xyh, получаемых по значениям азимута цели β*, угла места цели ε* и наклонной дальности цели d, поступающим от станции сопровождения цели (ССЦ), и значениям угла курса К, угла качки ψ и угла тангажа θ, поступающим от устройства гироазимутгоризонт (ГАГ), и использующий текущие координаты цели для обработки с помощью средств вычислительной техники.
Целью настоящего предлагаемого изобретения является повышение возможностей стрелка-зенитчика (оператора) при выборе вида пуска ракеты (навстречу/вдогон), выборе момента пуска ракеты, а также повышение возможностей при работе по быстро летящим целям и внезапно появляющимся целям путем предоставления оператору в реальном времени опережающей информации зонных признаков цели, путем автоматического наведения ракеты на цель и путем совмещения по времени работ по подготовке ракеты к пуску и наведения ракеты на цель с момента постановки цели на сопровождение.
Для решения этой задачи предлагается нижеприведенный алгоритм обработки следующих входных данных:
xC; yC; hC, t - параметры отметки цели текущего такта, записанные в массив входных данных М[4] в указанной последовательности,
PT - признак, единичное значение которого означает «установить новую цель»,
где: xC, yC, hC - координаты цели, заданные в левой прямоугольной системе координат 0xyh,
t - время текущей отметки цели, отсчитываемое от момента времени постановки цели на сопровождение,
и последовательных шагов:
шаг 1 - если PT равно единице, то устанавливаются начальные значения параметров выполнения алгоритма:
- устанавливаются начальные значения индексов IA0, IA1 записей регистра координат PA[NA][5] и индексов IB0, IB1 записей регистра скорости PB[NB][5]:
IA0=IB0=0,
IA1=IB1=-1,
где: NA - максимальное количество записей регистра координат, определяемое как константа для допустимого времени начального накопления координат и временного интервала поступления входных отметок цели,
NB - максимальное количество записей регистра скорости, определяемое как константа для допустимого значения коэффициента сглаживания скорости при максимальной среднеквадратичной ошибке входных координат,
IA0, IB0 - значения индексов начальной записи в регистрах PA, PB,
IA1, IB1 - значения индексов конечной записи в регистрах PA, PB,
- устанавливаются нулевые значения:
накапливающих сумматоров координат SA[5] и скорости SB[3],
признаков ZA, ZB режима накопления параметров,
количества записей регистра координат KA и регистра скорости KB,
шаг 2 - выполняется сглаживание входных координат:
- если ZA равно единице, в стационарном режиме накопления координат выполняется:
корректировка сумматоров SA:
SA=SA[i]-PA[k][i], где i принимает значения от 0 до 3, k=IA0,
корректировка индексов:
индексы IA0, IA1 инкрементируются, и если полученное значение индекса равно NA, устанавливается нулевое значение этого индекса,
- если ZA равно нулю, в переходном режиме накопления координат выполняется:
корректировка количества записей:
KA=KA+1, если KA равно NA, то ZA=1,
корректировка индекса IA1:
IA1=IA1+1,
- выполняется запись координат в накапливающие регистры:
PA[k][i]=M[i], где i принимает значения от 0 до 3, k=IA1,
- выполняется корректировка накапливающих сумматоров:
SA[i]=SA[i]+M[i], где i принимает значения от 0 до 3,
- вычисляются средние значения координат x0, y0, h0 и время t0 средних значений координат:
x0=SA[0]/KA,
y0=SA[1]/КA,
h0=SA[2]/KA,
t0=SA[3]/KA,
шаг 3 - формируется массив составляющих скорости MA:
MA[0]=(PA[i][0]-PA[j][0])/Tb,
МА[1]=(РА[i][1]-РА[j][1])/Tb,
MA[2]=(PA[i][2]-PA[j][2])/Tb,
где: Tb=(РА[i][3]-PA[j][3]),
i=IA1,
J=IA0.
шаг 4 - если ZA=1, выполняется сглаживание составляющих скорости:
- если ZB равно единице, в стационарном режиме накопления составляющих скорости выполняется:
корректировка сумматоров SB:
SB[i]=SB[i]-PB[k][i], где i принимает значения от 0 до 2, k=IB0,
корректировка индексов:
индексы IB0, IB1 инкрементируются, и если полученное значение индекса равно NB, устанавливается нулевое значение этого индекса.
- если ZB равно нулю, в переходном режиме накопления составляющих скорости выполняется:
корректировка количества записей:
KB=KB+1, если KB равно NB, то ZB=1,
корректировка индекса IB1:
IB1=IB1+1,
- выполняется запись составляющих скорости в накапливающие регистры:
PB[k][i]=MA[i], где i принимает значения от 0 до 2, k=IB1,
- выполняется корректировка накапливающих сумматоров:
SB[i]=SB[i]+MA[i], где i принимает значения от 0 до 2,
- вычисляются средние значения составляющих скорости vX, vY, vH:
vX=SB[0]/KB,
vY=SB[1]/KB,
vH=SB[2]/KB,
шаг 5 - определяются координаты упрежденной точки цели в стартовой системе координат OXYZ:
- если Vg больше значения Vмин, координаты упрежденной точки цели в стартовой системе координат определяются как:
XY=(ynvY+xnvX)/Vg,
ZY=(-ynvX+xnvY)/Vg,
где xn, yn - координаты упрежденной точки в системе координат 0xyh:
xn=x0+vXTn,
yn=y0+vYTn,
Tn - упрежденное время:
Tn=t-t0+nTи,
n - индекс, принимает значения от 0 до (Tm/ΔТ)-1,
Ти - шаг дискретизации времени для вычисления зонных признаков,
Tm - максимальное время упреждения,
Vg - горизонтальная составляющая скорости:
Vмин - минимальное значение скорости, определяемое как константа в зависимости от максимальной ошибки входных координат,
- если Vg не больше значения Vмин, координаты упрежденной точки цели в стартовой системе координат определяются как:
ZY=0,
шаг 6 - определяются значения зонных признаков в массиве признаков P[Nm]:
- вычисляются индексы k, p, m, q входа в таблицу зон пуска Z[Nh][Nv][Nφ][4]:
k=HC/Sh,
p=Vg/Sv,
m=φ/Sφ,
q принимает значения 0, 1, если XY<0, иначе q принимает значения 2, 3,
где Nm=Tm/ΔT,
Nh=Hm/Sh,
Nv=Vm/Sv,
Nφ=0.5π/Sφ,
Hm - максимальное табличное значение по высоте,
Vm - максимальное табличное значение по скорости,
Sh - дискретность значений таблицы зон по высоте,
Sv - дискретность значений таблицы зон по скорости,
Sφ - дискретность значений таблицы зон по углу,
HC - высота точки цели в стартовой системе координат:
HC=h0+vHTn,
φ - угол направления на точку цели от линии оси X:
φ=π/2-arcsin(|XY|/Dg),
где горизонтальная дальность точки цели:
- определяется значение горизонтальной дальности Rq1 для высоты HC и табличной скорости VP=pSv:
Rq1=Z[k][p][m][q]+(HC-k·Sh)(Z[k+1][p][m][q]-Z[k][p][m][q])/Sh;
- определяется значение горизонтальной дальности Rq2 для высоты HC и табличной скорости VP+1=(р+1)Sv:
Rq2=Z[k][p+1][m][q]+(HC-k·Sh)(Z[k+1][p+1][m][q]-Z[k][p+1][m][q])/Sh;
- определяется значение Rq для высоты HC и скорости Vg:
Rq=Rq1+(Vg-p·Sv)(Rq2-Rq1)/Sv,
- устанавливается значение признака вхождения точки цели в область пуска в массиве признаков P[Nm]:
если k>Nh-1 или р>Nv-1, то Р[n]=0 (цель вне границ зон пуска),
если q<2, то если R0>Dg>R1, P[n]=1 (цель в зоне пуска навстречу), иначе РМ-0,
если q>1, то если R2<Dg<R3, Р[n]=2 (цель в зоне пуска вдогон), иначе Р[n]=0;
шаг 7 - формируются значения выходных данных:
xt, yt, ht - координаты текущей точки цели, выдаваемые в канал ракетного комплекса,
P[Nm] - массив сформированных значений зонных признаков, выдаваемые для отображения на пульт оператора боевой машины,
- если ZA=0, то
xt=xC,
yt=yC,
ht=hC,
- если ZA=1, то
xt=x0+vX(t-t0),
yt=y0+vY(t-t0),
ht=h0+vH(t-t0),
и на основе этих параметров оператор определяет момент пуска ракеты с пусковой установки на боевой машине.
Перечень рисунков, чертежей
На фиг.1 приведены проекции траектории ракеты на плоскость OXZ при пуске «навстречу» и «вдогон».
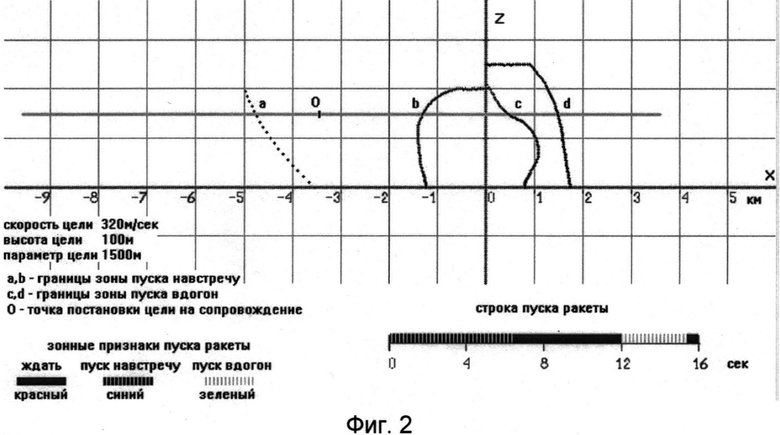
На фиг.2 показан принцип построения строки пуска ракеты.
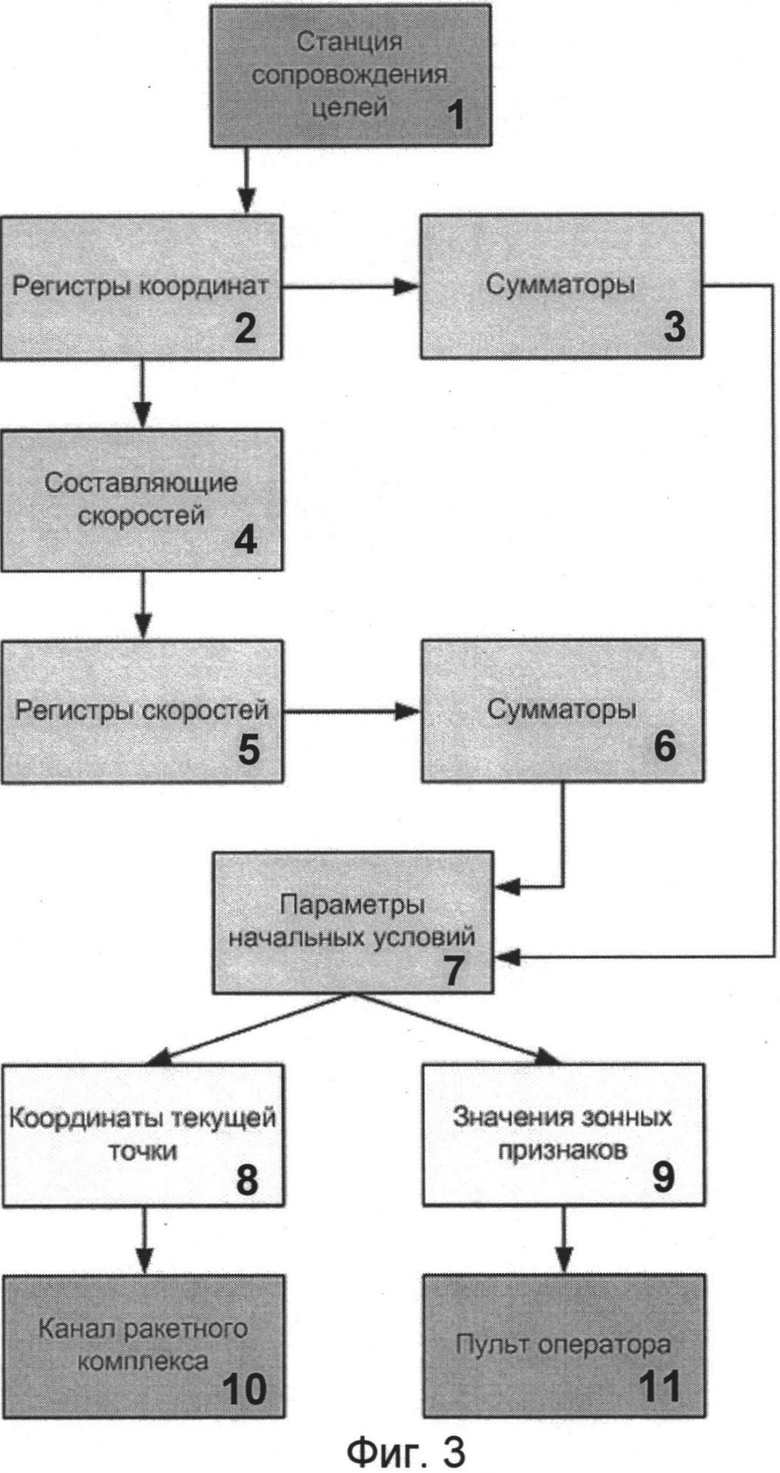
На фиг.3 приведена схема алгоритма предлагаемого способа.
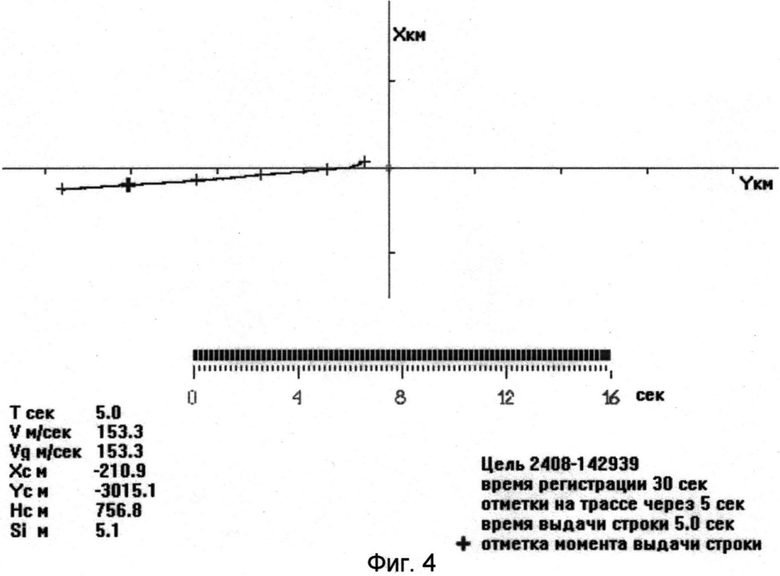
На фиг.4 показана строка пуска для скорости цели 150 м/с и времени выдачи строки 5 с от начала регистрации.
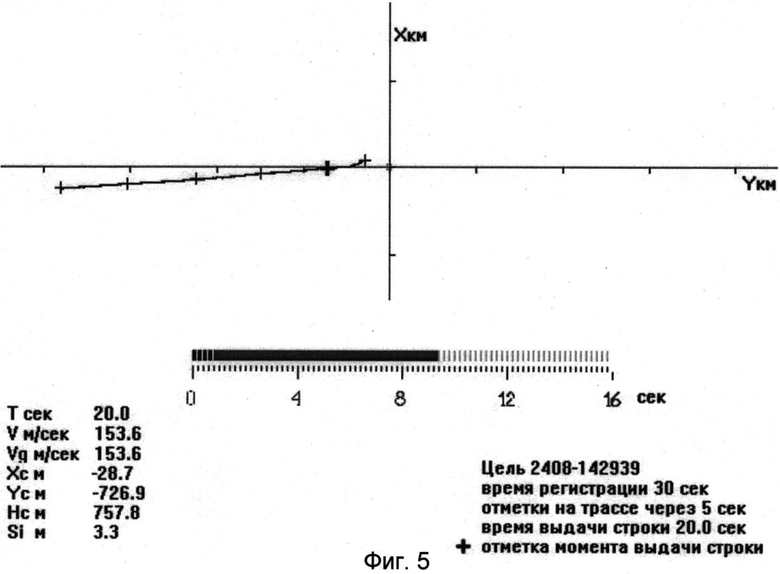
На фиг.5 показана строка пуска для скорости цели 150 м/с и времени выдачи строки 20 с от начала регистрации.
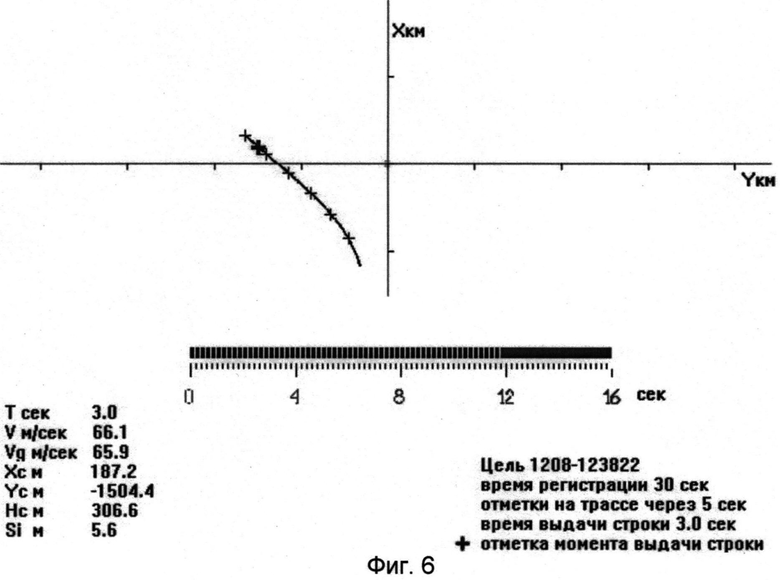
На фиг.6 приведена строка пуска для скорости цели 66 м/с.
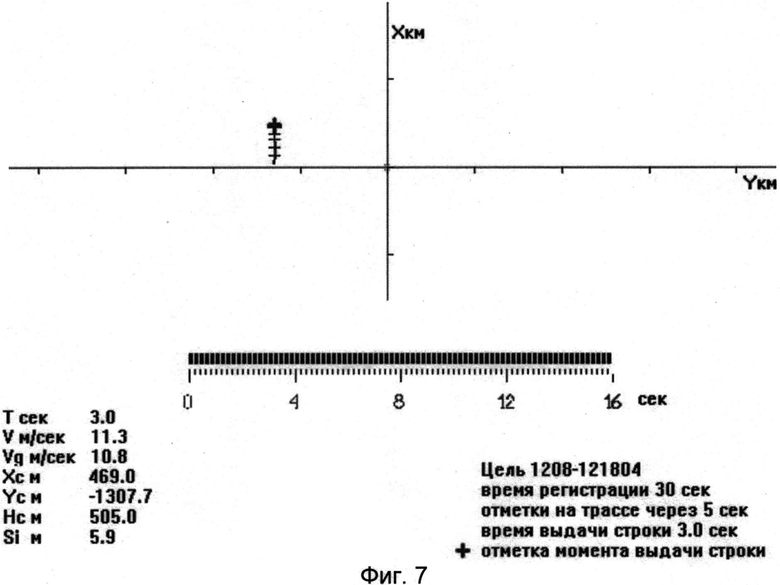
На фиг.7 приведена строка пуска для скорости цели 10 м/с.
На фиг.8 показан пуск ракет изделия БМ ЗСУ-23-4М4 по беспилотной цели-мишени.
Пример варианта реализации заявляемого способа
На фиг.1 обозначены: 1 - станция сопровождения целей, 2 - регистры координат, 3 - сумматоры, 4 - составляющие скоростей, 5 - регистры скоростей, 6 - сумматоры, 7 - параметры начальных условий, 8 - координаты текущей точки, 9 - значения зонных признаков, 10 - канал ракетного комплекса, 11 - пульт оператора.
Постановка задачи.
Переносной зенитный ракетный комплекс типа «Игла» предназначен для поражения воздушных целей на дальности до 5 км. Для пуска ракеты стрелок-зенитчик должен обнаружить цель, определить ее тип, выбрать вид и режим пуска, затем выполнить следующие операции [1]:
- активировать наземный блок питания (НИП);
- установить вид пуска (навстречу/вдогон);
- определить режим селектора оптической головки самонаведения (ОГС) (включен/выключен);
- выполнить прицеливание и сопровождение цели;
- выполнить пуск в автоматическом или ручном режиме.
При размещении пусковых установок на борту боевой машины пуском ракет управляет оператор, сидящий в башне боевой машины. Для оператора задача выбора момента пуска ракеты усложняется.
На фиг.1 приведены результаты моделирования пуска ракеты по цели, движущейся на высоте 100 м. Траектория полета ракеты учитывает ограничение по максимальной угловой скорости (12 град/с) и ограничение по дальности управляемого полета ракеты (5000 м). Пуск ракеты выполняется с интервалом времени 0.1 с с момента начала полета цели. На рисунке показаны проекции тех траекторий ракеты на плоскость XZ, для которых точка встречи ракеты с целью получена. Как видно из рисунка, на догонном курсе пуск ракеты по быстролетящей цели должен выполняться с точностью до секунды. Для оператора цель отображается точкой на экране индикатора, пространственное положение цели представлено цифровой информацией с темпом обновления в секундном диапазоне (2 с). Оператору трудно выполнить анализ этой информации для пуска ракеты с требуемой точностью.
Внезапное появление целей усложняет принятие решений пуска ракеты. Современные сценарии боевого налета включают использование малогабаритных целей, низколетящих целей, использование рельефа местности и средств радиоэлектронной борьбы. Все это снижает возможность дальнего обнаружения цели, и цель может появиться «внезапно», уже в зоне пуска. Внезапно цель появляется, когда команда по цели получена с командного пункта в момент, когда цель уже находится в зоне пуска. В этом случае трудность пуска ракеты в том, что факт нахождения цели в зоне пуска ракеты еще не означает возможность успешного пуска. Время подготовки ракеты к пуску и пуск, начиная от включения источника питания и до включения маршевого двигателя (до 7 секунд), может превысить оставшееся время нахождения ракеты в зоне пуска, и в этом случае пуск может быть ошибочным.
Предлагаемый метод упрощает решение задачи пуска ракеты для оператора, находящегося в башне боевой машины.
Описание способа.
Предлагаемый способ выполнения пуска ракеты заключается в предоставлении оператору динамической опережающей информации относительно тех решений, которые можно принять. Работа оператора сводится не к анализу окружающей обстановки для принятия решения, а к выбору конкретного решения из возможных. Способ реализуется путем получения информации о принятии возможных решений по цели на ближайшее время и выдачи этой информации оператору в реальном времени.
Это выполняется следующим образом.
Для поставленной на сопровождение цели по ее текущим координатам определяются параметры начальных условий траектории цели. Эти параметры позволяют получить координаты упрежденной точки для заданного времени упреждения. В каждом такте вычислений определяются значения признака вхождения цели в зону пуска ракеты для моментов времени, начиная от текущего времени, и до максимального упрежденного времени Тм (16 с) с интервалом Ти (0.2 с). Полученная информация выдается оператору на строке пуска ракеты. Время на строке пуска отсчитывается от текущего момента времени (левая граница) до Тм (правая граница). Признаки отображаются на строке в соответствии с упрежденным временем признака. Значение признака отображается цветом. На строке оператор видит заранее, сколько времени цель будет находиться в зоне пуска, когда пуск ракеты невозможен (красный цвет), с какой скоростью события приближаются к текущему моменту времени и когда пуск ракеты возможен. Пуск ракеты возможен от момента касания левой границей области пуска отметки текущего времени и до момента прохождения правой границей области пуска отметки текущего времени.
На фиг.2 показана строка пуска ракеты для цели, летящей линейно на высоте 100 м, со скоростью 320 м/с. На рисунке показана проекция траектории цели на плоскости XZ. Точки пересечения линии траектории цели с дальней и ближней границей зоны пуска навстречу для этой цели - а и b, точки c и d - точки пересечения линии траектории цели с ближней и дальней границей зоны пуска вдогон.
С момента постановки цели на сопровождение (точка О) начинается выполнение следующих операций: выдача оператору предупреждающего сигнала о начале работы по цели, включение НИП ракеты (ракет), наведение ракеты (ракет) на цель по текущим координатам цели от станции сопровождения цели (ССЦ), накопление и сглаживание текущих координат цели. После времени Тн начального накопления координат (3 с) наведение ракеты на цель выполняется по сглаженным координатам, оператору выдается строка пуска, показанная на фиг.2. Точкам b, с и d границ зон на строке пуска соответствует ближняя граница зоны пуска навстречу и ближняя и дальняя границы зоны пуска вдогон. Временные значения границ на строке пуска отсчитываются от текущего времени и определяются по скорости цели, вычисление которой начинается после начального накопления координат.
На фиг.3 приведена схема алгоритма предлагаемого способа. По координатам цели от станции сопровождения цели определяются параметры начальных условий траектории цели. По параметрам начальных условий определяются уточненные текущие координаты цели, по которым ракеты на пусковых установках наводятся на цель. По параметрам начальных условий и таблицам зон пуска определяются значения зонных признаков цели. Значения зонных признаков в реальном времени выдаются на пульт оператора.
Определение параметров начальных условий.
Траектория движения цели определяется в левой прямоугольной системе координат Oxyh. Начало системы координат совпадает с точкой пересечения оси вращения башни боевой машины (БМ) с плоскостью погона БМ. Положительное направление оси х - направление на Север. Положительное направление оси h - направление в Зенит. Ось y дополняет систему координат до левой прямоугольной системы координат.
Входными данными для определения траектории цели являются значения текущих координат точки цели, определяемые станцией сопровождения цели (ССЦ). ССЦ определяет азимут цели β*, угол места цели ε* и наклонную дальность цели d. Эти параметры определяются в системе координат Ox1y1h1, связанной с осями корпуса БМ. Ось Ox1 лежит на линии продольной оси БМ в направлении от «кормы» на «нос». Ось Oy1 лежит на линии поперечной оси БМ, в направлении «левый борт», «правый борт», если смотреть с «кормы» БМ. Ось Oh1 дополняет оси Ox1 и Oy1 до левой прямоугольной системы координат.
Перевод значений β* и ε* из системы координат Ox1y1b1 в систему координат Oxyh выполняется по значениям угла курса К, угла качки ψ и угла тангажа θ. Значения этих углов вырабатываются устройством гироазимутгоризонт (ГАГ). Угол курса К - угол между направлением оси Ох и проекцией оси Ox1 на плоскость Oxy, угол качки ψ - угол оси Ox1 с плоскостью Оху, угла тангажа θ - угол оси Oy1 с плоскостью Оху. Значения азимута цели β и угла места цели ε в системе координат Oxyh определяются следующим образом:
β=K+Arctg(A/B),
где: А=Cosε*Sinβ*Cosθ+Sinε*Sinθ,
B=Cosε*Cosβ*Cosψ-Sinε*Cosβ*Sinψ+Cosε*Sinβ*SinθSinψ,
ε=Arcsin(Cosε*Cosβ*Sinψ+Sinε*Cosβ*Cosψ-Cosε*Sinβ*SinθCosψ).
Текущие координаты точки цели в системе координат Oxyh, определяются следующим образом:
xc=dCosβCosε,
yc=dSinβCosε,
hc=dSinε.
Для вычисления параметров начальных условий выполняется сглаживание. Получение сглаженного значения дискретного параметра по n значениям параметра на интервале времени Т выполняется методом прямоугольников [2]:
где Δt - шаг дискретизации.
Метод дает хорошее приближение при малом шаге дискретизации, однако суммирование большого количества параметров не соответствует в настоящее время производительности бортовых ЭВМ. Поэтому для сглаживания используются кольцевые регистры и накапливающие сумматоры. Регистры накапливают текущие значения параметров, сумматоры содержат суммы значений параметров. Получение суммы значений параметра сводится к корректировке сумматора. Корректировка выполняется путем добавления к текущей сумме вновь поступившего в регистр значения для этого параметра и вычитания значения параметра, «выталкиваемого» из кольцевого регистра для этого параметра. Вычитание выполняется в стационарном режиме накопления параметров, то есть когда количество накопленных записей стало равным максимальному количеству записей для регистра.
Сглаженное значение координаты получается путем деления суммы значений координаты на количество записей координат, накопленных в регистрах. Сглаженным координатам х0, y0, h0 соответствует среднее время t0 для всех записей регистров координат.
Составляющая скорости по х определяется по следующему выражению:
где xa - значение координаты для первой (текущей) записи;
xc - значение координаты последней записи;
ta, tc - время первой и последней записей регистров координат.
Составляющие скорости по осям y, h вычисляются аналогично. Полученные значения составляющих скорости включают значительную шумовую составляющую. Эти значения сглаживаются с использованием регистров и сумматоров составляющих скорости.
Блок параметров начальных условий создается в каждом такте при поступлении текущих координат цели от ССЦ. Блок параметров содержит:
х0, y0, h0 - координаты начальной точки траектории,
vx, vy, vh - составляющие скорости,
t0 - время начальной точки траектории.
Определение зонных признаков.
Зона пуска представляет собой часть пространства, при нахождении цели в которой должен производиться пуск ракеты. Границы зон пуска определяются в стартовой системе координат OXYZ. Начало системы координат расположено в точке стояния пусковой установки. Ось ОХ лежит в горизонтальной плоскости в направлении параллельно проекции вектора скорости цели на эту плоскость. Ось OY направлена вертикально вверх, ось OZ дополняет систему координат до правой.
Границы зон пуска определены значениями горизонтальных дальностей R для различных по высоте горизонтальных сечений этих зон в функции скорости цели VC и угла φ между направлением на точку цели и осью ОХ. Горизонтальная дальность R измеряется в прямоугольной системе координат O1X1Z1, плоскость которой параллельна плоскости OXZ стартовой системы координат, оси O1X1 и O1Z1 направлены параллельно соответствующим осям ОХ и OZ стартовой системы координат, а начало системы координат O1X1Z1 лежит на оси OY стартовой системы координат.
Границы зон пуска в памяти вычислителя представлены таблицей Z[Nh][Nv][Nφ][4], где значения Nh, Nv, Nφ определены максимальными значениями высоты Hm (3000 м), скорости Vm (360 м/с), угла φ (90 град) и дискретностью значений по высоте Sh (100 m), скорости Sv (10 м/с), и углу Sφ (1 град). Для каждого дискретного набора значений высоты, скорости и угла φ в таблице Z указаны четыре значения горизонтальной дальности Rq: для дальней границы зоны пуска навстречу R0, ближней границы навстречу R1, ближней границы вдогон R2 и дальней границы вдогон R3. Границы зон пуска симметричны относительно оси O1X1, поэтому в таблице указаны значения Rq только для положительных Z1.
Определение значений зонных признаков выполняется в каждом такте (0.005 с) получения текущих координат цели от станции сопровождения цели для моментов времени Ti от текущего момента времени до упрежденного максимального времени Тм с интервалом Ти следующим способом:
- определяются координаты цели в системе координат Oxyh для момента времени Ti;
- полученные координаты переводятся в стартовую систему координат OXYZ;
- определяется значение признака вида пуска ракеты PP (навстречу или вдогон);
- в зависимости от значения признака PP определяются границы зоны пуска;
- определяется значение признака PZ вхождения точки цели в область пуска ракеты (пуск навстречу, пуск вдогон, вне зоны пуска);
- формируется массив зонных признаков.
Координаты точки цели в системе координат Oxyh для момента времени Ti определяются по следующим выражениям:
xi=х0+TyvX,
yi=y0+TyvY,
hi=h0+TyvH,
где: Ty=t-t0+Ti,
t - текущее время;
t0 - время начальной точки траектории.
Координаты точки цели в системе координат Oxyh переводятся в стартовую систему координат OXYZ. Определяется значение горизонтальной составляющей скорости цели:
Если Vg больше значения Vмин, то координаты по Х и Z стартовой системы координат определяются как:
XY=(yivY+xivX)/Vg,
ZY=(-yivX+xivY)/Vg.
Значение Vмин определяется как константа для максимальной ошибки координат, получаемых от ССЦ. Если Vg меньше значения Vмин, то скорость Vg считается нулевой, и координаты цели определяются как:
ZH=0,
что определяет пуск ракеты навстречу по неподвижной цели.
Высота цели в стартовой системе координат НC принимается равной hi, так как начальные точки системы координат Oxyh и системы координат OXYZ совпадают.
Значение признака вида пуска ракеты PP определяется по знаку координаты XY: при отрицательном знаке координаты XY устанавливается нулевое значение PP (пуск навстречу), иначе устанавливается ненулевое значение PP (пуск вдогон).
При нулевом значении PP определяются с использованием таблицы зон пуска значения горизонтальной дальности R0 и R1, при ненулевом PP определяются значения R2 и R3. Для определения любой горизонтальной дальности Rq используются значения высоты HC, скорости Vg, и угла φ. Значение угла φ для обращения к таблице зон пуска определяется как:
φ=π/2-arcsin(|XY|/Dg),
где значение горизонтальной дальности
Значение дальности до границы зоны пуска Rq по текущим значениям hi, Vg, φ определяется путем линейного интерполирования дискретных значений Rq таблицы зон пуска по высоте и скорости. Малый шаг таблицы по φ (1 градус) позволяет исключить интерполирование по φ. Получение интерполированных значений Rq по высоте и скорости цели выполняется следующим образом.
Вычисляются индексы k, p, m входа в таблицу Z, как целые значения выражений:
k=HC/Sh, p=Vg/Sv, m=φ/Sφ.
Определяется значение горизонтальной дальности Rq1 для высоты HC и табличной скорости VP=pSv:
Rq1=Z[k][p][m][q]+(HC-k·Sh)(Z[k+1][p][m][q]-Z[k][p][m][q])/Sh.
Определяется значение горизонтальной дальности Rq2 для высоты HC и табличной скорости VP+1=(р+1)Sv:
Rq2=Z[k][p+1][m][q]+(HC-k·Sh)(Z[k+1][p+1][m][q]-Z[k][p+1][m][q])/Sh.
Определяется значение Rq для высоты НC и скорости Vg:
Rq=Rq1+(Vg-p·Sv)(Rq2-Rq1)/Sv.
Значение признака PZ вхождения точки цели в область пуска определяется по значениям k, p и значениям R0, R1 при нулевом значении PP или значениям R2, Р3 при ненулевом значении PP:
k>Nh-1. Устанавливается нулевое значение PZ (точка цели вне зон пуска), так как высота точки цели превышает максимальную высоту для пуска ракеты.
р>Nv-1. Устанавливается нулевое значение PZ (точка цели вне зон пуска), так как скорость цели превышает максимальную скорость для пуска ракеты.
Если R0>Dg>R1, то устанавливается PZ=1 (точка цели в зоне пуска навстречу), иначе PZ=0.
Если R2<Dg<R3, то устанавливается PZ=2 (точка цели в зоне пуска вдогон), иначе PZ=0.
Для исключения неопределенности при прохождении точкой цели границы зоны вводится допуск δR. Значение δR определяется максимальными ошибками координат. Если абсолютное значение разницы Dg и Rq не превышает δR, сохраняется значение PZ, определенное на предыдущем такте.
Полученное значение PZ записывается в массив строки пуска ракеты. После получения PZ для всех Ti массив строки пуска содержит значения зонных признаков от текущего времени до упрежденного времени Тм с интервалом Ти. Признак PZ строки пуска на экране пульта оператора отображаются цветом значения признака.
Оператор по строке пуска определяет возможность пуска ракеты, определяет вид пуска (навстречу/вдогон) и определяет момент пуска ракеты с учетом сигнала от ракеты о захвате цели и ее удержании, передаваемого на пульт оператора.
Результаты использования предлагаемого способа
Оценка точности определения информации для пуска ракеты и динамика отображения этой информации на экране оператора выполнялась на цифровой модели. Модель включает генератор трасс, имитатор локатора и имитатор боевой машины (БМ). Генератор трасс выдает точные координаты текущей точки цели для заданных оператором параметров траектории движения. Имитатор локатора позволяет выдавать текущие координаты цели для заданной оператором траектории движения с равновероятным или нормальным законом распределения ошибок. Кроме этого имитатор может восстановить работу реально работавшего локатора по результатам регистрации. При этом восстанавливается аналитическая траектория цели на время полета. Имитатор БМ имитирует отображение строки пуска ракеты, собирает статистику работы по цели и выдает результаты в графической и цифровой форме.
По результатам моделирования с использованием нормального закона распределения ошибок получен следующий обобщенный результат: если упрежденное время не превышает наблюдательное время, то ошибки координат упрежденной точки не превышают ошибки входных координат. Среднеквадратичная ошибка координат текущей точки цели в среднем на порядок меньше ошибки входных координат.
Временная точность расположения зонного признака на строке пуска определяется ошибкой координат упрежденной точки цели и значением скорости цели. При приближении скорости цели к нулевому значению ошибки положения зонных признаков на строке пуска возрастают по экспоненте. Минимальное значение скорости определяется допустимым временем начального накопления координат (3 с) и среднеквадратическими ошибками станции сопровождения цели определения координат точки цели по азимуту и углу места (0.1°) и по дальности (10 м). Как показали результаты моделирования, при скорости цели больше 30 м/с ошибка положения зонных признаков не превышает 0.2 с для текущего времени, и не превышает 1 с для максимального упрежденного времени (16 с).
На фиг.4 - фиг.7 показаны строки пуска ракеты. Эти значения получены по результатам регистрации работы изделия на полигоне. На этих рисунках показана проекция траектории цели на плоскости, параметры цели, строка пуска ракеты. Численные значения скорости цели (V), горизонтальной скорости (Vg), координат точки цели (XC, YC, HC), значение среднеквадратичной ошибки входных координат (Si) приведены для указанного на рисунках времени Т от начала регистрации.
На фиг.4 показана строка пуска для времени 5 с от начала регистрации. По этой строке видно, что запрет пуска ракеты будет через 15.6 с. На фиг.5 показана строка пуска для этой же цели через 15 с. Запрет пуска будет через 0.6 с. Эти рисунки показывают практически полученную точность выдачи упреждающей информации. На фиг.5 показана строка пуска для цели скоростью 66 м/с. По этой строке видно, что пуск ракеты может выполняться «навстречу», так как времени для подготовки ракеты к пуску достаточно. При этом ракета уже наведена на цель по сглаженным координатам, так как строка пуска сформирована по скорости цели. На фиг.6 показана строка пуска для времени 3 с. Эта цель - почти «зависший» вертолет. Пуск ракеты по этой цели выполняется «навстречу», как по неподвижной цели.
Промышленная применимость
Использование рассмотренного способа.
Рассмотренный способ пуска ракеты промышленно реализуем, внедрен для зенитного ракетно-пушечного комплекса ЗСУ-23-4М4 «Шилка». На фиг.7 показан пуск ракет по беспилотной мишени. Особенность этого пуска в том, что интервал времени от момента схода мишени с полигонной пусковой установки и до момента встречи ракет с мишенью составил не более 20 секунд.
Отличительные свойства рассмотренного способа.
1. Задача поражения цели ракетой с пассивной системой самонаведения в настоящее время не может быть полностью автоматизирована. Это связано с наличием трудно формализуемых исходных параметров для решения этой задачи и динамикой изменения этих параметров. Человек остается решающим звеном успешного пуска ракеты. Рассматриваемый способ позволяет повысить эффективность поражения цели путем предоставления человеку опережающей динамической информации.
2. Оператору для пуска ракеты выдается информация не положения цели в пространстве, а информация возможности пуска ракеты по цели, что сводит задачу пуска не к анализу обстановки, а к выбору решения из возможных решений на ближайшее время, что повышает правильность принятия решения.
3. Зонные признаки на строке пуска приближаются к текущему моменту времени в реальном времени. Это повышает точность определения момента пуска ракеты в условиях дефицита времени.
4. Наведение ракеты на цель выполняется автоматически, что освобождает оператора от этой работы и повышает точность наведения ракеты на цель.
5. Операции подготовки ракеты к пуску и операции получения информации о возможности пуска совмещены во времени, что уменьшает работное время по цели.
6. В случае включения источника внешних помех наведение ракеты на цель для захвата цели оптической головкой самонаведения может выполняться с выключенной станцией сопровождения цели по параметрам начальных условий траектории цели. Это повышает защищенность комплекса от средств РЭБ. После пуска ракеты станция сопровождения цели может быть отключена, что повышает скрытность локации целей.
Список литературы
1. Переносной зенитный ракетный комплекс «Игла». Техническое описание. Москва, Военное издательство, 1987 г.
2. Б.С.Алешин, А.А.Афонин, К.К.Веремеенко и др. Ориентация и навигация подвижных объектов. Москва, ФИЗМАТЛИТ, 2006 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| СПОСОБ ПОСТРОЕНИЯ ИНТЕГРАЛЬНОЙ ЗОНЫ ПОРАЖЕНИЯ ГРУППИРОВКИ ОГНЕВЫХ СРЕДСТВ | 2010 |
|
RU2430384C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЗЕНИТНОГО РАКЕТНО-ПУШЕЧНОГО КОМПЛЕКСА | 2012 |
|
RU2506523C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСТРЕБИТЕЛЕМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРИ ЕГО БЛИЖНЕМ НАВЕДЕНИИ НА ГРУППОВУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2015 |
|
RU2593911C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759058C1 |
| СПОСОБ СТРЕЛЬБЫ ПО ДВИЖУЩЕЙСЯ ЦЕЛИ ПРОТИВОТАНКОВОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2014 |
|
RU2564051C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2757094C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2014 |
|
RU2559373C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |

Для осуществления пуска ракеты на подвижной пусковой установке производят определение уточненных координат текущей точки цели и зонных признаков цели и выдачу на пульт оператора в реальном времени опережающей динамической информации для принятия решений по пуску ракеты. Повышается боевая эффективность комплекса. 8 ил.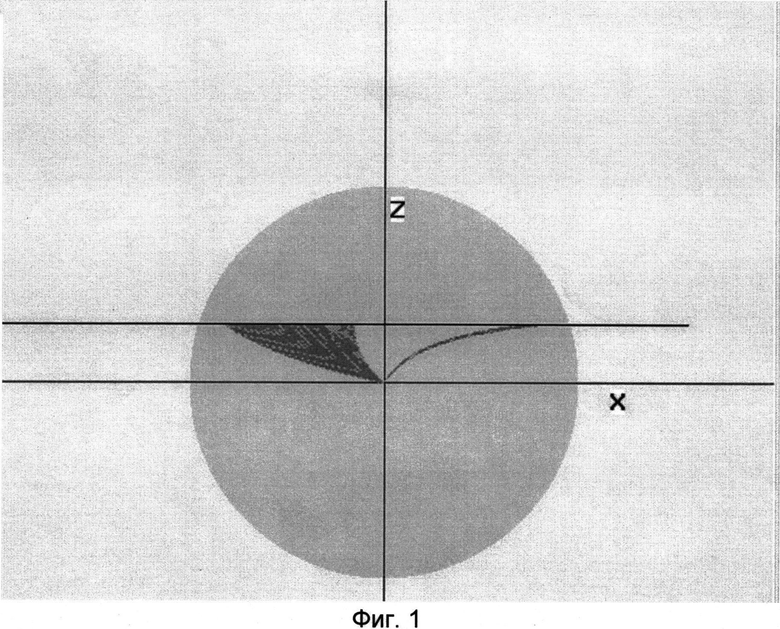
Способ пуска ракет для подвижных пусковых установок с использованием текущих координат цели в прямоугольной системе координат 0xyh, получаемых по значениям азимута цели β*, угла места цели ε* и наклонной дальности цели d, поступающим от станции сопровождения цели (ССЦ), и значениям угла курса К, угла качки ψ и угла тангажа θ, поступающим от устройства гироазимутгоризонт (ГАГ), и использующий эти значения при обработке с помощью средств вычислительной техники, отличающийся определением по параметрам начальных условий уточненных текущих координат цели для наведения ракет на пусковых установках на цель и определения по параметрам начальных условий зонных признаков, выдаваемых на пульт оператора для выполнения оператором пуска ракет с пусковых установок, путем обработки следующих входных данных:
xC, yC, hC, t - параметры отметки цели текущего такта, записанные в массив входных данных М[4] в указанной последовательности,
PT - признак, единичное значение которого означает «установить новую цель»,
где: xC, yC, hC - координаты цели, заданные в левой прямоугольной системе координат 0xyh,
t - время текущей отметки цели, отсчитываемое от момента времени постановки цели на сопровождение,
и последовательных шагов:
шаг 1 - если PT равно единице, то устанавливаются начальные значения параметров выполнения алгоритма:
- устанавливаются начальные значения индексов IA0, IA1 записей регистра координат PA[NA][5] и индексов IB0, IB1 записей регистра скорости PB[NB][5]:
IA0=IB0=0;
IA1=IB1=-1;
где: NA - максимальное количество записей регистра координат, определяемое как константа для допустимого времени начального накопления координат и временного интервала поступления входных отметок цели,
NB - максимальное количество записей регистра скорости, определяемое как константа для допустимого значения коэффициента сглаживания скорости при максимальной среднеквадратичной ошибке входных координат,
IA0, IB0 - значения индексов начальной записи в регистрах PA, PB,
IA1, IB1 - значения индексов конечной записи в регистрах PA, PB,
- устанавливаются нулевые значения:
накапливающих сумматоров координат SA[5] и скорости SB[3],
признаков ZA, ZB режима накопления параметров,
количества записей регистра координат KA и регистра скорости KB,
шаг 2 - выполняется сглаживание входных координат:
- если ZA равно единице, то в стационарном режиме накопления координат выполняется:
корректировка сумматоров SA:
SA[i]=SA[i]-PA[k][i], где i принимает значения от 0 до 3, k=IA0,
корректировка индексов:
индексы IA0, IA1 инкрементируются, и если полученное значение индекса равно NA, то устанавливается нулевое значение этого индекса,
- если ZA равно нулю, то в переходном режиме накопления координат выполняется:
корректировка количества записей:
KA=KA+1, если KA равно NA, то ZA=1,
корректировка индекса IA1:
IA1=IA1+1,
- выполняется запись координат в накапливающие регистры:
PA[k][i]=M[i], где i принимает значения от 0 до 3, k=IA1,
- выполняется корректировка накапливающих сумматоров:
SA[i]=SA[i]+M[i], где i принимает значения от 0 до 3,
- вычисляются средние значения координат x0, y0, h0 и время t0 средних значений координат:
x0=SA[0]/KA,
y0=SA[1]/КА,
h0=SA[2]/КА,
t0=SA[3]/KA,
шаг 3 - формируется массив составляющих скорости MA:
МА[0]=(РА[i][0]-РА[j][0])/Tb,
MA[1]=(PA[i][1]-PA[j][1])/Tb,
МА[2]=(РА[i][2]-РА[j][2])/Tb,
где: Tb=(РА[i][3]-PA[j][3]),
i=IA1,
j=IA0,
шаг 4 - если ZA=1, то выполняется сглаживание составляющих скорости:
- если ZB равно единице, то в стационарном режиме накопления составляющих скорости выполняется:
корректировка сумматоров SB:
SB[i]=SB[i]-PB[k][i], где i принимает значения от 0 до 2, k=IB0,
корректировка индексов:
индексы IB0, IB1 инкрементируются, и если полученное значение индекса равно NB, то устанавливается нулевое значение этого индекса.
- если ZB равно нулю, то в переходном режиме накопления составляющих скорости выполняется:
корректировка количества записей:
KB=KB+1, если KB равно NB, то ZB=1,
корректировка индекса IB1:
IB1=IB1+1,
- выполняется запись составляющих скорости в накапливающие регистры:
PB[k][i]=MA[i], где i принимает значения от 0 до 2, k=IB1,
- выполняется корректировка накапливающих сумматоров:
SB[i]=SB[i]+MA[i], где i принимает значения от 0 до 2,
- вычисляются средние значения составляющих скорости vX, vY, vH:
vX=SB[0]/KB,
vY=SB[1]/KB,
vH=SB[2]/KB,
шаг 5 - определяются координаты упрежденной точки цели в стартовой системе координат OXYZ:
- если Vg больше значения Vмин, то координаты упрежденной точки цели в стартовой системе координат определяются как:
XY=(ynvY+xnvX)/Vg,
ZY=(-ynvX+xnvY)/Vg,
где xn, yn - координаты упрежденной точки в системе координат 0xyh:
xn=x0+vXTn,
yn=y0+vYTn,
Tn - упрежденное время:
Tn=t-t0+nТи,
n - индекс, принимает значения от 0 до (Tm/ΔТ)-1,
Ти - шаг дискретизации времени для вычисления зонных признаков,
Tm - максимальное время упреждения,
Vg - горизонтальная составляющая скорости:
Vмин - минимальное значение скорости, определяемое как константа в зависимости от максимальной ошибки входных координат,
- если Vg не больше значения Vмин, то координаты упрежденной точки цели в стартовой системе координат определяются как:
ZY=0,
шаг 6 - определяются значения зонных признаков в массиве признаков P[Nm]:
- вычисляются индексы k, p, m, q входа в таблицу зон пуска Z[Nh][Nv][Nφ][4]:
k=HC/Sh,
p=Vg/Sv,
m=φ/Sφ,
q принимает значения 0, 1, если XY<0, иначе q принимает значения 2, 3,
где Nm=Tm/ΔT,
Nh=Hm/Sh,
Nv=Vm/Sv,
Nφ=0.5π/Sφ,
Hm - максимальное табличное значение по высоте,
Vm - максимальное табличное значение по скорости,
Sh - дискретность значений таблицы зон по высоте,
Sv - дискретность значений таблицы зон по скорости,
Sφ - дискретность значений таблицы зон по углу,
HC - высота точки цели в стартовой системе координат:
HC=h0+vHTn,
φ - угол направления на точку цели от линии оси X:
φ=π/2-arcsin(│XY│/Dg),
где горизонтальная дальность точки цели:
- определяется значение горизонтальной дальности Rq1 для высоты HC и табличной скорости VP=pSv:
Rq1=Z[k][p][m][q]+(HC-k·Sh)(Z[k+1][p][m][q]-Z[k][p][m][q])/Sh;
- определяется значение горизонтальной дальности Rq2 для высоты HC и табличной скорости VP+1=(р+1)Sv:
Rq2=Z[k][p+1][m][q]+(HC-k·Sh)(Z[k+1][p+1][m][q]-Z[k][p+1][m][q])/Sh;
- определяется значение Rq для высоты HC и скорости Vg:
Rq=Rq1+(Vg-p·Sv)(Rq2-Rq1)/Sv,
- устанавливается значение признака вхождения точки цели в область пуска в массиве признаков P[Nm]:
если k>Nh-1 или р>Nv-1, то Р[n]=0 (цель вне границ зон пуска),
если q<2, то если R0>Dg>R1, P[n]=1 (цель в зоне пуска навстречу), иначе Р[n]=0,
если q>1, то если R2<Dg<R3, Р[n]=2 (цель в зоне пуска вдогон), иначе Р[n]=0,
шаг 7 - формируются значения выходных данных:
xt, yt, ht - координаты текущей точки цели, выдаваемые в канал ракетного комплекса для наведения ракет на пусковых установках на цель,
P[Nm] - массив сформированных значений зонных признаков, выдаваемые для отображения на пульт оператора боевой машины для выполнения оператором пуска ракет с пусковых установок,
где:
- если ZA=0, то
xt=xC,
yt=yC,
ht=hC,
- если ZA=1, то
xt=x0+vX(t-t0),
yt=y0+vY(t-t0),
ht=h0+vH(t-t0).
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2002 |
|
RU2241193C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| МОБИЛЬНЫЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2253820C2 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |

