Область техники, к которой относится изобретение
Настоящее изобретение относится по существу к сетям управления технологическим процессом и, более конкретно, к способу статистического определения некоторой оценки параметра контура управления технологическим процессом в заданном сегменте перемещения или работы.
Уровень техники
В производственных и перерабатывающих процессах крупных промышленных предприятий обычно используется система управления технологическими процессами для управления работой одного или нескольких устройств для управления технологическим процессом, таких как клапаны. Система основана на обратной связи с одним или несколькими датчиками, такими как датчики положения, расхода, температуры или другого типа. Каждое множество подобных устройств для управления технологическим процессом, клапанов и датчиков образует то, что обычно называется "контуром управления технологическим процессом". Более того, каждый клапан или любое другое устройство может, в свою очередь, включать внутренний контур, в котором, например, позиционер клапана управляет приводом клапана для перемещения управляющего элемента, такого как затвор клапана, в ответ на управляющий сигнал и получает обратную связь от датчика, такого как датчик положения, для управления перемещением затвора клапана. Внутренний контур иногда называют сервоконтуром. В любом случае управляющий элемент устройства управления технологическим процессом может перемещаться в ответ на изменяющееся давление текучей среды, оказывающее действие на подпружиненную мембрану, или в ответ на вращение вала, при этом в каждом случае перемещение может быть вызвано изменением управляющего сигнала. В случае одного из стандартных механизмов управления клапаном управляющий сигнал величиной, варьирующейся в пределах от 4 до 20 мА (миллиампер), заставляет позиционер изменять количество проходящей текучей среды и тем самым изменять давление текучей среды в камере давления пропорционально величине управляющего сигнала. Изменяющееся давление текучей среды в камере давления вызывает перемещение мембраны, сжимающей пружину, вызывающей в свою очередь перемещение затвора клапана.
Устройства для управления технологическим процессом вырабатывают сигнал обратной связи, указывающий на получение отклика от устройства на управляющий сигнал, и подают данный сигнал обратной связи (или указание на отклик) в систему управления технологическим процессом или в привод клапана для использования в управлении технологическим процессом или клапаном. Например, механизмы клапана обычно вырабатывают сигнал обратной связи, указывающий на положение (например, перемещение) затвора клапана, давление в камере текучей среды клапана или значение другого параметра, имеющего отношение к действительному положению затвора клапана.
При том что система управления технологическим процессом обычно использует эти сигналы обратной связи наряду с остальными сигналами, такими как ввод данных в точно настроенный централизованный алгоритм управления, влияющий на общее управление технологическим процессом, установлено, что недостаточная эффективность управляющего контура может, тем не менее, вызываться плохими условиями работы отдельных управляющих устройств, связанных с контуром управления, включая, например, нестабильность в управляющем контуре технологического процесса. "Нестабильность" системы происходит, когда она не может достичь точки равновесия во время работы. Сотрудники предприятий часто называют подобную нестабильность зацикливанием, рысканием или раскачиванием, что противоречит нормальным условиям работы, при которых система достигает точки равновесия или "автоматической коррекции".
Во многих случаях неисправности, связанные с одним или несколькими отдельными устройствами для управления технологическим процессом, не могут быть исключены из контура регулирования средствами системы управления технологическим процессом, и, в результате, управляющие контуры с низкой эффективностью переводятся в ручной режим, или их настройки расстраиваются до уровня, когда они эффективно работают в ручном режиме. В некоторых случаях персонал предприятия может отслеживать отдельные зацикленные контуры и расстраивать настройки соответствующего контроллера или перевести неисправный контур в режим ручного управления. Если система настраивается, известно, что это неисправность настройки, а не аппаратная неисправность. Схожим образом, если процесс обладает известной быстрой динамикой (например, контур потока), операторы смогут привести в соответствие выходные данные контроллера с определенной переменной процесса. Если выходом контроллера является треугольная волна, а переменной процесса является прямоугольная волна, они часто приходят к выводу, что управляющий клапан «залипает». Эти узкоспециализированные процедуры применяются многими операторами предприятий, но они включают ряд ограничений. Например, первая процедура требует от оператора перевода системы в режим ручного управления, что может быть недопустимо, особенно в случае выхода технологических процессов из-под контроля. Вторая процедура подходит для определения предельных циклов, включаемых управляющим контуром технологического процесса, но она неспособна отслеживать нестабильность в сервоконтуре. Более того, соотношение между управляющим сигналом и переменной процесса не всегда является прямым вследствие осложнений, таких как комплексная динамика процесса, нелинейная динамика процесса, динамика процесса с перекрестными связями и возмущения процесса. Нестабильность в сервоконтуре особенно трудно распознать, поскольку персонал предприятия не имеет доступа к переменным внутреннего состояния управляющего клапана. Дополнительные неисправности возникают, когда на нестабильность влияет технологическая текучая среда, как, например, в случае отрицательных градиентов. В подобных ситуациях клапан может испытывать колебания при эксплуатации, но начинает нормально работать автономно.
Недостаточную эффективность работы регулирующего контура обычно можно преодолеть за счет контроля рабочего состояния или "состояния" каждого из устройств управления технологическим процессом, связанных с контуром или по меньшей мере наиболее критичных устройств управления технологическим процессом, связанных с контуром, и путем ремонта или замены недостаточно эффективных устройств управления технологическим процессом. Состояние устройства управления технологическим процессом можно определить при измерении одного или нескольких параметров, связанных с устройством управления технологическим процессом и при определении, находится ли указанный один или указанные несколько параметров вне приемлемого диапазона. Одной из неисправностей, которая может быть отслежена, является обнаружение нестабильности контура технологического процесса или устройства управления.
Ранее было сложно определить источник или причину нестабильности в рамках контура управления технологическим процессом без анализа техническим специалистом и диагностики системы, что могло потребовать времени и финансовых затрат. В некоторых случаях этим специалистам приходилось удалять устройства управления технологическим процессом из управляющего контура для стендовых испытаний устройств, или, альтернативно, сами управляющие контуры были оборудованы обходными клапанами и избыточными устройствами управления технологическим процессом, которые делали возможным обход конкретного устройства управления технологическим процессом для его испытания при сохранении технологического процесса. В качестве альтернативы операторы должны были ждать до тех пор, пока технологический процесс не прервется или не подвергнется плановому останову, для испытания отдельных устройств управления технологическим процессом, которые могут являться источником нестабильной работы. Каждый из этих процессов требует временных и финансовых затрат и обеспечивает только промежуточные определения нестабильности в системе. Далее, ни один из этих способ не пригоден, в частности, для определения источника или причины нестабильности при выполнении технологического процесса в реальном времени, т.е. без вмешательства в процесс или его остановки.
Осуществлялись попытки оперативного сбора данных от устройства управления технологическим процессом и получения указания на характеристики устройств при их помощи. Например, патент США №5,687,098, выданный Grumstrup и другим, раскрывает систему изобретения, которая собирает данные устройств и формирует и отображает ответную характеристику устройства. Аналогично, патент США №5,966,679, выданный Latwesen и другим, озаглавленный "Способ и средства для не изменяющего структуру получения оперативных измерений параметров устройства управления технологическим процессом", раскрывает систему, которая оперативно собирает данные устройства и использует их для непосредственного вычисления ряда определенных параметров устройства, таких как зона нечувствительности, время простоя и т.п. Полное раскрытие патента '679, указанное ссылкой, считается включенным в описание настоящей заявки.
Кроме того, полное раскрытие патента США №6,466,893, озаглавленного "Статистическое определение или прогнозирование параметров управляющего контура технологического процесса," также считается включенным в описание настоящей заявки. Патент '893 раскрывает способ статистического определения оценок одного или нескольких параметров контура технологического процесса, таких как трение, зона нечувствительности, время простоя, колебания, поворот вала или мертвый ход устройства управления технологическим процессом. В частности, данный способ включает сбор данных сигнала, имеющих отношение к выходному параметру и к входному параметру, сохранению данных сигнала в виде серии дискретных точек, устранению ряда последовательных точек в соответствии с заданным алгоритмом, а также выполнение статистического анализа сокращенной последовательности точек для получения среднего значения одного или нескольких параметров управления технологическим процессом. Способ позволяет прогнозировать среднее трение привода, например, для клапанов с выдвижным штоком.
Однако способ, рассматриваемый в патенте США №6,466,893, ограничен определением среднего значения параметра управления технологическим процессом в пределах всего диапазона, покрываемого доступными данными. Например, этот способ позволяет получить общее значение трения, связанное с полным диапазоном перемещения подвижного элемента. При этом может быть участок, поддиапазон или сегмент перемещения, в котором трение по существу выше или ниже, чем на других участках. Как осознает средний специалист в данной области, значительное трение на конкретном участке может указывать на то, что клапан заедает, и его реакция на управляющий сигнал недостаточна, или он не в состоянии обеспечить правильное отключение. С другой стороны, незначительное трение может указывать на то, что набивка клапана, которая может быть использована в качестве уплотнения между штоком и стенкой клапана, приходит в негодность. В любом случае, сегменты, в которых трение по существу отклоняется от нормы или от соседних участков, могут требовать технического обслуживания, замены или хотя бы тщательной проверки. К сожалению, среднее значение трения по существу скрывает клапаны с отклоняющимся значением трения на потенциально неисправных участках. Понятно, что если перемещение покрывает диапазон по существу шире, чем неисправный участок, среднее значение может нивелировать необычно высокие или низкие значения. Таким образом, среднее значение может быть просто не в состоянии отразить ситуацию, когда один или несколько сегментов неисправны.
Более того, даже когда среднее значение точно указывает на то, что существует неисправность, само значение не может указывать на определенный сегмент перемещения или диапазон работы, который может потребовать внимания. Например, на основании неудовлетворительного среднего значения трения клапана с выдвижным штоком можно предположить, что целая деталь клапана (или даже сам клапан) требуют замены. При этом во многих случаях может быть необходимо знать точное или относительно точное место возникновения неисправности. Эта информация может помочь в проведении частичного ремонта или по меньшей мере в сборе статистических данных, имеющих отношение к сбоям, чтобы определить, какие из элементов наименее надежны, и, возможно, усовершенствовать конструкцию этих элементов в будущем.
Раскрытие изобретения
Способ оценки параметра технологического процесса устройства в заданном сегменте перемещения подвижного элемента устройства позволяет оператору или инженеру определить, работает ли подвижная часть устройства некорректно на одном или более участках в пределах всего рабочего диапазона подвижной части. В частности, способ позволяет получать измерения сигнала внутри управляющего контура технологического процесса, сохранять измеренный сигнал в виде данных сигнала, разделять сигнал на несколько участков, соответствующих различным сегментам перемещения или рабочего хода, а также выполнять анализ данных сигнала на некоторых или на всех участках для определения прогнозируемых данных параметра для одного или нескольких сегментов. С одной стороны, данные участков соответствуют неперекрывающимся сегментам равного размера для облегчения визуального и статистического сравнения сегментов. С другой стороны, данные сигнала могут быть разделены на сегменты в соответствии с заданным процентом перемещения до необходимого числа сегментов или заданного количества данных, содержащихся в отдельном сегменте.
В одной реализации способ изобретения позволяет просто измерять сигнал в контуре регулирования технологического процесса, при этом контур регулирования технологического процесса оперативно подключен к среде технологического процесса. По меньшей мере в нескольких реализациях данный способ можно применять в реальном времени, поскольку данные собираются из регулирующего контура технологического процесса. Дополнительно или альтернативно данный способ может применяться к автономным данным.
В одной реализации оценка параметра, соответствующая каждому сегменту, представляется графически на дисплее. В другой реализации программное обеспечение, работающее на устройстве в регулирующем контуре технологического процесса или вне его, автоматически обрабатывает оценки параметра технологического процесса для некоторых или всех сегментов и определяет отклоняющиеся значения параметра. В другом аспекте способ может быть реализован в рамках пакета прикладных программ для конфигурации, контроля и отображения параметров, имеющих отношение к работе клапанов, такого как AMS ValveLink® компании Fisher Controls International LLC of Marshalltown, Iowa. В другой реализации способ может быть реализован на устройствах, собирающих в оперативном режиме данные управления технологическим процессом. В другом аспекте способ может быть применен к данным сигнала, хранящимся автономно. Данный способ может также включать сравнение ретроспективных данных для одного и того же сегмента с целью измерения тенденции изменения выбранного параметра технологического процесса с течением времени. В частности, конкретный параметр может оцениваться для одного или нескольких сегментов в заданные интервалы времени, например раз в неделю. В соответствии с данной реализацией еженедельные оценки могут отображаться на одиночном графике или обрабатываться автоматически для определения изменения значения с течением времени. С другой стороны, данный метод может использовать статистические технологии, такие как вычисление стандартного отклонения, усредненного значения и среднего значения для всего диапазона перемещения, а также другие параметры, полезные при сравнении отдельных сегментов перемещения с другими сегментами целого диапазона перемещения.
Оценка параметра может быть оценкой трения устройства (такого как клапан или другое устройство), имеющего привод (который может быть любой подвижной частью устройства), которое перемещается в ответ на давление привода. В этом случае при данном способе измеряется первый сигнал, указывающий на давление привода, измеряется второй сигнал, указывающий на положение привода, и затем сохраняется последовательность точек данных, при этом у каждой точки данных составляющая давления привода является производной от сигнала давления привода, а составляющая положения привода является производной от сигнала положения привода. Для каждого сегмента с помощью данного способа может создаваться сокращенное множество данных из соответствующего участка последовательности точек данных и определяться оценка трения из сокращенного множества данных. Для создания сокращенного множества данных каждая последовательность точек данных на участке анализируется для определения, находится ли точка данных вне зоны трения устройства, и эта последовательность помещается в сокращенное множество данных, если точка находится вне зоны трения. Для определения, находится ли точка данных вне зоны трения, разница между составляющими положения привода двух точек данных может сравниваться с пороговым значением, разница между составляющими давления привода двух точек данных может сравниваться с пороговым значением, или наклон кривой в точек данных может сравниваться с порогом наклона кривой. После этого сокращенное множество данных может быть подвергнуто исключению трендов для удаления линейных трендов, составляющие давления привода в отношении множества данных с исключенным трендом могут быть отображены в виде гистограммы, а разница давлений, основанная на результатах полученной гистограммы, может быть использована для определения оценки трения.
Оценкой параметра также может быть оценка зоны нечувствительности, которая может быть определена из оценки трения для конкретного сегмента, и усиление открытого контура, связанного с управляющим контуром технологического процесса. Аналогично, оценкой параметра может быть оценка времени простоя, которое может быть получено при выполнении кросс-корреляционного анализа или анализа суммы квадратичных ошибок сохраняемых данных сигнала для конкретного сегмента и выбора задержки времени, связанной с кросс-корреляционным анализом или анализом суммы квадратичных ошибок в качестве оценки времени простоя.
Оценка параметра может также быть оценкой свойственного сегменту кручения вала устройства, имеющего привод. В этом случае сохраняемый сигнал может служить указанием на положение привода, и оценка кручения вала для каждого сегмента может быть определена при определении множества последовательных точек данных, которые располагаются на участке линии кручения вала в определенном положении, вычислении кручения вала, основанном на разнице положений привода конечных точек множества последовательных точек данных и повторении данной процедуры для следующего положения в пределах того же сегмента перемещения, а также вычислении значения кручения вала путем усреднения измерений кручения вала для всех положений в пределах сегмента. При необходимости множество последовательных точек данных, которые располагаются на участке линии кручения вала, также может быть определено при вычислении наклона в каждой последовательной точке на графике и сравнении вычисленного наклона с порогом наклона кривой.
Краткое описание чертежей
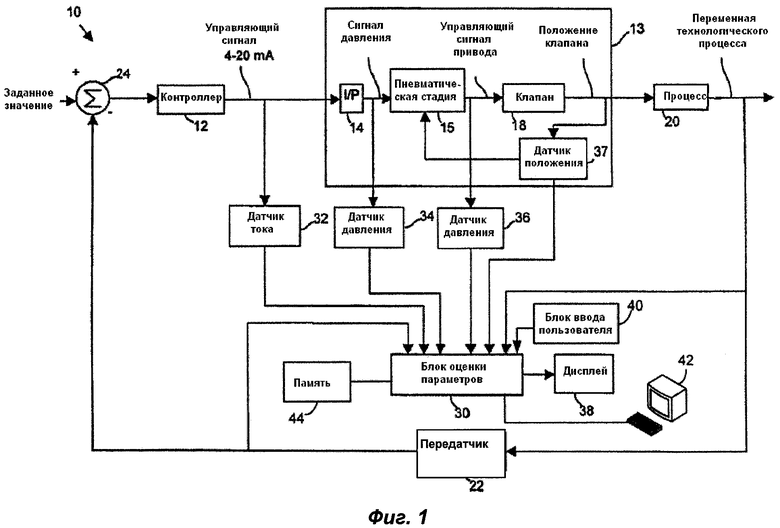
Фиг.1 представляет собой блок-схему, иллюстрирующую регулирующий контур технологического процесса, включающий устройство, которое статистически определяет свойственные сегменту оценки для одного или нескольких параметров контура в соответствии с настоящим изобретением.
Фиг.2 иллюстрирует график зависимости давления привода от процентного отношения перемещения привода для типового клапана с выдвижным штоком.
Фиг.3 иллюстрирует график, соответствующий множественным измерениям давления привода при процентном отношении перемещения привода для типового клапана с с выдвижным штоком.
Фиг.4 иллюстрирует график, соответствующий множественным измерениям давления привода при процентном отношении перемещения привода для типового поворотного клапана.
Фиг.5 - это представление основанной на сегменте гистограммы данных, соответствующих графику, изображенному на Фиг.3.
Фиг.6 иллюстрирует график зависимости давления привода от положения привода для двух сегментов перемещения типового поворотного клапана.
Фиг.7 - это представление основанной на сегменте гистограммы множества данных, включающего подмножества, соответствующие графикам, изображенным на Фиг.4.
Фиг.8 - это график, иллюстрирующий определение тенденций трения клапанов, измеряемого для двух отдельных сегментов перемещения типового клапана в течение определенного периода времени.
Фиг.9 - это блок-схема одного из возможных обобщенных алгоритмов оценки значений трения, свойственных сегменту.
Осуществление изобретения
Ссылаясь на Фиг.1, управляющий контур 10 технологического процесса с одним входом и одним выходом проиллюстрирован как контур, включающий управляющую систему 12 управления технологическим процессом, которая отправляет, например, управляющий сигнал от 4 до 20 мА устройству 13 для управления технологическим процессом, например управляющему клапану в сборе. Устройство 13 показано как устройство, включающее преобразователь 14 ток-давление, которое (типично) отправляет сигнал манометрического давления от 3 до 15 фунтов на квадратный дюйм (0,2-1 бар) на пневматическую стадию 15 клапана, так что пневматический позиционер и привод, или пневматическое реле и/или привод, в свою очередь, с помощью пневматики управляет клапаном 18 с сигналом давления (воздуха). Работа клапана 18 управляет сочленением подвижного элемента клапана, расположенного здесь (не показан), который в свою очередь управляет переменной процесса в ходе технологического процесса 20. Обычно передатчик 22 измеряет переменную 20 технологического процесса и передает указание на измеренную переменную процесса сумматору 24. Сумматор 24 сравнивает измеренное значение переменной процесса (преобразуемое в нормализованное процентное отношение) с заданным значением для выработки сигнала об ошибке, указывающего на разницу между ними. Далее сумматор 24 подает вычисленный сигнал об ошибке в систему 12. Заданное значение, которое может быть сгенерировано пользователем, оператором или другим управляющим лицом, обычно нормализуется в диапазоне от 0 до 100% и указывает на необходимое значение обрабатываемой переменной. Система 12 использует сигнал об ошибке для генерации управляющего сигнала в соответствии с любой необходимой технологией и передает управляющий сигнал устройству 13 для влияния тем самым на управление переменной процесса.
Хотя устройство 13 показано как включающее отдельный блок 14 для преобразования ток-давление, пневматическую стадию 15 и клапан 18, устройство 13 может включать любой другой тип клапанных механизмов или элементов вместо показанных на Фиг.1 или в дополнение к ним, включая, например, электропневматический позиционер со встроенным блоком для преобразования ток-давление. Кроме того, электропневматический позиционер может также включать один или несколько датчиков и/или память, и/или оценивающий блок для оценки параметров. Более того, необходимо понимать, что устройство 13 может быть устройством любого другого типа (помимо устройства регулирующего клапана), которое управляет переменной технологического процесса любым другим необходимым или известным способом. Устройство 13 может быть, например, шибером и т.п.
С устройством 13 или любой другой частью управляющего контура 10 с помощью известных датчиков соединен оценивающий блок 30. Оценивающий блок 30, который может быть компьютером, таким как микрокомпьютер, имеющий память и процессор, собирает данные о состоянии устройств в контуре 10 и статистически определеяет из собранных данных один или несколько параметров контура управления технологическим процессом, таких как трение, время простоя, зона нечувствительности и т.д., используя, например, компьютерную программу или алгоритм. Например, как показано на Фиг.1, измерительный блок 30 может определять один или несколько управляющих сигналов, доставляемых блоком 14 с помощью датчика 32 тока, давления на выходе от блока 14 с помощью датчика 34 давления, выходом управляющего сигнала привода пневматической стадией 15 с помощью датчика 36 давления, а также положения клапана на выходе клапана 18 с помощью датчика 37 положения. При необходимости оценивающий блок 30 может также или альтернативно определять сигнал заданного значения, сигнал ошибки на выходе сумматора 24, переменной процесса, выхода передатчика 22 или любого другого сигнала или явления, которое вызывает или указывает на перемещение или работу устройства 13 или управляющим контуром 10. Необходимо также отметить, что другие типы устройств управления технологическим процессом могут иметь другие сигналы или явления, связанные с этим, которые могут использоваться оценивающим блоком 30.
Как станет очевидным, блок 30 может также считывать указания управляющего сигнала контроллера, сигнала давления, управляющего сигнала привода или положения клапана, если устройство 13 сконфигурировано для связи с этими измерениями. Аналогично, блок 30 может определять сигналы, генерируемые другими датчиками уже в устройстве 13, такими как положение клапана, указываемое датчиком 37. Разумеется, датчики, используемые блоком 30, могут быть любыми известными датчиками и могут быть либо аналоговыми, либо цифровыми датчиками. Например, датчик 37 может быть любым устройством, необходимым для измерения перемещения или положения, включая, например, потенциометр, регулируемый дифференциальный трансформатор с линейной характеристикой, синус-косинусный вращающийся трансформатор, датчик перемещения Холла, магниторезистивный датчик перемещения, датчик перемещения переменной емкости и т.п. Очевидно, что если датчики являются аналоговыми, оценивающий блок 30 может включать один или несколько преобразователей аналоговых сигналов в цифровые, которые анализируют аналоговый сигнал и хранят проанализированный аналоговый сигнал в памяти в оценивающем блоке 30. Однако если датчики являются цифровыми, они могут передавать цифровые сигналы непосредственно в оценивающий блок 30, который может затем сохранять эти сигналы в памяти любым необходимым образом. Более того, если собираются один или несколько сигналов, оценивающий блок 30 может хранить эти сигналы как компоненты точек данных, связанных с любым конкретным моментом времени. Например, каждая точка данных в момент Tj, T 2,… Tn может иметь компонент входного управляющего сигнала, компонент сигнала давления, компонент сигнала перемещения привода и т.п. Разумеется, эти точки данных или соответствующие компоненты могут храниться в память любым необходимым или известным способом.
Более того, хотя оценивающий блок 30, показан как отделенный от устройства 13 (как, например, расположенный на размещающем устройстве), это устройство может быть внутренним для устройства 13 или любого другого устройства для управления технологическим процессом (например, полевым устройством) в сети управления технологическим процессом. Если устройство 13 является устройством, основанном на микрокомпьютере, оценивающий блок 30 может иметь с ним общие процессор и память, уже имеющиеся в устройстве 13. Альтернативно оценивающий блок 30 может иметь свой собственный процессор и память. Таким образом, предполагается, что статистический анализ может быть выполнен в устройстве, в котором выполняются измерения (как и в любом полевом устройстве) с результатами, которые отправляются на дисплей пользователя или на размещающее устройство для использования, или, альтернативно, измерения сигналов могут выполняться устройством (таким как полевое устройство), и такие измерения отправляются в удаленное место (такое как размещающее устройство), в котором выполняется статистический анализ.
В одной реализации оценивающий блок 30 определяет трение, зону нечувствительности, время простоя или другой параметр управляющего контура технологического процесса одного или более сегментов перемещения устройства 13 (или другого устройства внутри управляющего контура 10), используя статистический анализ, основанный на выполненных измерениях, в то время как устройство 13 работает оперативно в среде технологического процесса. По существу для получения оценки параметра оценивающий блок 30 анализирует один или несколько сигналов, например, внутри устройства 13, и сохраняет проанализированные данные в памяти 44. При необходимости оценивающий блок 30 может манипулировать данными для устранения ненужных данных, резко отклоняющихся значений и т.п. либо до либо после сохранения собранных данных в памяти. После сбора достаточного количества данных, позволяющих определить статистическую оценку необходимого параметра технологического процесса по меньшей мере для двух сегментов перемещения, оценивающий блок 30 использует программу статистического анализа, которая может храниться в памяти 44, связанной с оценивающим блоком 30 и реализованной на микропроцессоре внутри него, для вычисления оценки параметра технологического процесса для каждого из сегментов. Разумеется, оценивающий блок 30 может использовать любую необходимую программу или процедуру статистического анализа. Некоторые примеры программ статистического анализа для конкретных параметров могут быть реализованы с помощью соответствующим образом написанной компьютерной программы или алгоритма, хранящегося внутри и реализуемого оценивающим блоком 30, будут рассмотрены более подробно в данном документе.
После вычисления некоторого множества оценок параметров оценивающий блок 30 может отобразить оценки на дисплейном блоке 38, который может быть, например, электронно-лучевым экраном, принтером, голосовым генератором, сигнальным устройством или любым другим необходимым устройством связи. Разумеется, оценивающий блок 30 может предупреждать пользователя о значениях оценок любым другим необходимым способом. Устройство ввода пользователя 40 может быть соединено с оценивающим блоком 30 проводным или беспроводным способом. Устройство ввода пользователя 40 может быть полной или ограниченной клавиатурой, указательным устройством, таким как мышь, или другим средством ввода данных, известным в области техники. При использовании устройства ввода 40 оператор или технический специалист может указывать такие параметры, как количество сегментов перемещения, размер сегмента, временной интервал для периодического захвата сигнала, а также продолжительность периода, в течение которого данные сигнала собираются оценивающим блоком 30.
Дополнительно или на выбор оператор, технический специалист или любое другой уполномоченный пользователь может использовать компьютерную рабочую станцию 42 для ввода одного или нескольких параметров, перечисленных выше (количество сегментов, размер сегмента и т.п.). Компьютерная рабочая станция может соединяться с оценивающим блоком 30 и может включать средства ввода, такие как клавиатура и дисплей. Необходимо принять во внимание, что анализ данных и другая работа, связанная с обработкой данных, собираемых от датчиков 32-37, датчика 22, а также от процесса 20, может выполняться оценивающим блоком 30 в совместной работе с рабочей станцией 42, или одним оценивающим блоком 30, или рабочей станцией 42.
В реализациях, при которых оценивающий блок 30 выполняет измерение требуемых данных, и при этом управляющее устройство 13 работает оперативно, оценивающий блок 30 не требует автономной работы управляющего устройства 13 или его исключения из нормальной рабочей среды. В этих реализациях, поскольку оценивающий блок 30 соединен с управляющим контуром технологического процесса 10 и измеряет сигналы, необходимые для выполнения статистической оценки определенных параметров технологического процесса в течение нормальной работы управляющего контура технологического процесса 10, оценивающий блок 30 определяет параметры управляющего устройства технологического процесса непрерывно, без пересечения с работой процесса 20 управляющего контура технологического процесса 10. Альтернативно оценивающий блок 30 может оценивать параметры технологического процесса, свойственные сегменту, при обработке оперативных данных в последующем, или даже при обработке автономных данных. Например, оценивающий блок 30 может обрабатывать данные технологического процесса, соответствующие измерениям одного из нескольких параметров управляющего контура 10, собираемых в течение периода времени и хранящихся в памяти. С этой целью некоторые из реализации оценивающего блока 30 могут включать дополнительный интерфейс с такими периферийными устройствами, как, например, привод CD/DVD, чтобы дать возможность оценивающему блоку 30 получать эффективный доступ к автономным данным. Далее, оценивающий блок 30 может работать совместно с постоянным запоминающим устройством, таким как запоминающий блок 44. Поскольку некоторые из рассматриваемых реализаций оценивающего блока 30 могут включать небольшую внутреннюю память или не включать ее, запоминающий блок 44 может хранить данные реального времени и/или ретроспективные данные, имеющие отношение к работе управляющего контура 10.
При другой реализации оценивающий блок 30 может располагаться внутри компьютера, такого как стационарная или переносная рабочая станция, которая в свою очередь может находиться внутри или вне управляющего контура 10 одиночного вывода. Например, оценивающий блок 30 может быть прикладной программой, хранящейся в памяти рабочей станции, получающей данные измерений от датчика 22 и по меньшей мере от некоторых датчиков 32-37 с помощью любых подходящих средств связи, включая средства, известные в области техники. Точнее говоря, некоторые или все из датчиков 22 и датчиков 32-37 могут передавать измерения, связанные с работой управляющего контура 10 по цифровой шине, по беспроводному соединению или при сочетании обоих способов. В некоторых реализациях оценивающий блок 30 может включать компоненты как программного, так и аппаратного обеспечения, такие, например, как выделенные процессоры или память. В другой реализации оценивающий блок 30 может быть прикладной программой, распространяемой на несколько аппаратных компонентов.
Хотя оценивающий блок 30 может быть запрограммирован или сконфигурирован для оценки любого необходимого параметра процесса с применением любого необходимого статистического анализа, в настоящем описании подробно описываются особенно полезные статистические подходы для оценки трения, оценки мертвой зоны, оценки мертвого времени и оценки кручения вала. Однако настоящее изобретение не ограничивает возможность применения любого из этих подходов и, более того, не ограничивает определение оценок только этими свойственными сегменту параметрами; следует понимать, что для определения этих и других параметров устройства или процесса согласно настоящему изобретению возможно применение других статистических подходов.
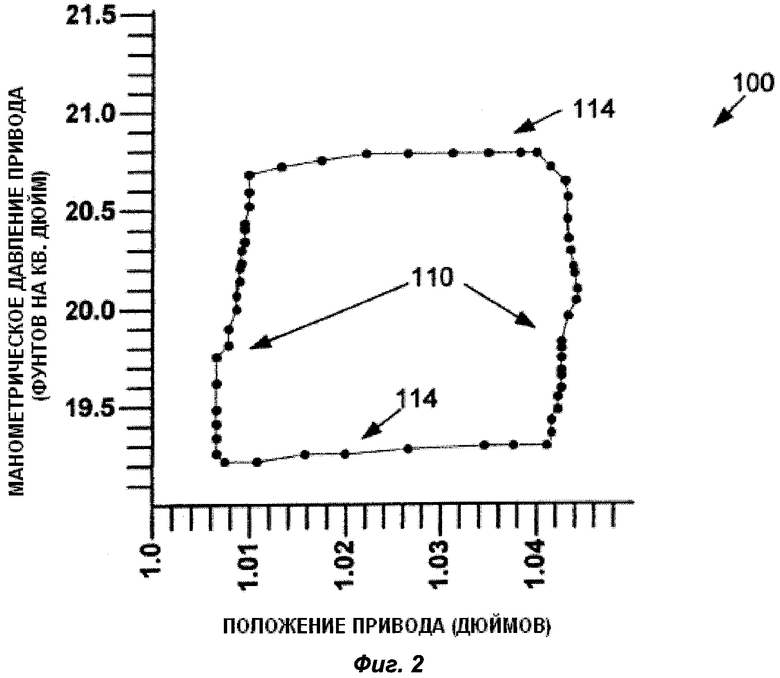
Одним из подходов для оценки трения в устройстве контроля процесса, таком как клапан с выдвижным штоком или поворотный клапан, является задание для оценивающего блока 30 на сбор данных, относящихся к перемещению привода или положению (считанных, например, с датчика 37 на Фиг.1) и давлению привода клапана (считанных, например, с датчика 34 или 36 на Фиг.1) за определенный промежуток времени. Типично, собранные данные будут храниться в памяти как последовательность точек данных, в которой каждая точка данных содержит компонент давления привода, являющийся производной сигнала давления, и компонент позиции привода, являющийся производной сигнала измеренного положения привода относительно перемещения. Разумеется, следует понимать, что компоненты давления и положения привода в любой точке данных должны относиться к одному и тому же моменту времени. Поэтому при применении двух или более измеренных сигналов предпочтительно собирать эти сигналы в один тот же промежуток времени, чтобы посредством этого получать данные, коррелированные во времени.
Фиг.2 иллюстрирует график 100 давления привода относительно положения привода для типичного клапана с выдвижным штоком. В частности, каждая точка на графике 100 соответствует одновременному измерению давления привода и положения привода. График 100 соответствует единичному циклу работы, во время которого привод функционирует в зоне трения. Специалисты в данной области поймут, что после изменения направления перемещения на обратное подвижной элемент клапана проходит через зону трения, в которой в значительной степени возрастает или уменьшается приложенное давление при незначительном результирующем перемещении подвижного элемента клапана или отсутствии такого перемещения. Эта зона трения, обусловленная трением в клапане, на Фиг.2, обычно обозначается более вертикальными линиями 110. После ухода из зоны трения подвижная часть клапана затем проходит значительное расстояние при относительно незначительном изменении приложенного давления. Эта операция на Фиг.2 обычно обозначается более горизонтальными линиями 114. Разумеется, также возможны другие способы представления соотношения между давлением привода и положением привода. Например, давление привода и положение привода может быть представлено на графике отдельно относительно времени. Посредством выставления двух полученных графиков вдоль одной оси времени оба графика можно проанализировать одновременно, чтобы определить величину давления, требуемого для начала перемещения привода. Таким образом, обычный специалист в данной области поймет, что обсуждаемые в настоящем описании типовые графики приводятся только для иллюстрации.
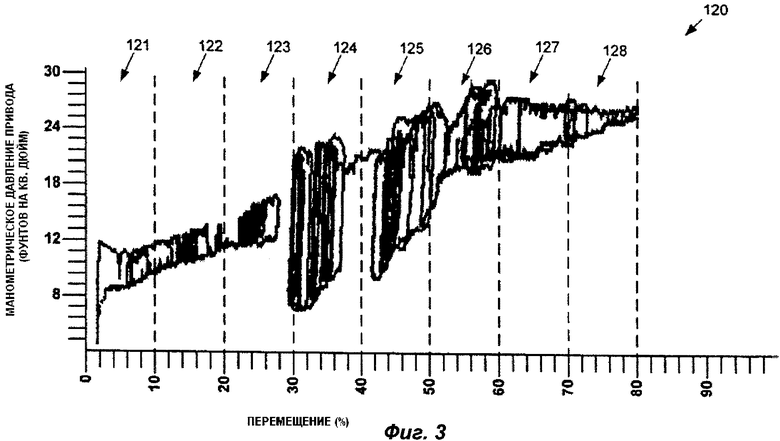
Обычному специалисту в данной области также очевидно, что единичный цикл работы по существу не дает достаточную информацию о том, насколько хорошо работает клапан с выдвижным штоком. В частности, расположение зоны трения клапана зависит от положения подвижного элемента клапана относительно операционного диапазона элемента. На Фиг.3, график 120 представляет работу подвижного элемента клапана на 80% диапазона перемещения в течение множества циклов. Как и на Фиг.2, график 120 содержит много вертикальных линий, каждая из которых соответствует зоне трения для конкретного цикла работы. Как и на Фиг.2, более горизонтальные линии графика 120 отвечают тем участкам перемещения, в которых шток перемещается благодаря относительно незначительным изменениям давления.
Как обсуждалось выше, известные способы оценки технологических параметров не позволяют обнаружить, что скользящий шток данного клапана не встречается на различных сегментах с одной и той же силой трения. Например, оценка среднего трения на всем протяжении от 0% до 80% диапазона перемещения, как показано на Фиг.3, эффективно стирает разницу между трением на 0-10% диапазона перемещения и трением на 10%-20% диапазона. Иными словами, оценка значения среднего трения на основе данных, показанных на Фиг.3, известными методами может привести только к единичному значению. Это единичное значение не в состоянии выявить наличие одной или более локальных неисправностей и тем более местоположение этих неисправностей в доступном диапазоне перемещения.
В одном из раскрываемых примеров эти недостатки преодолеваются логическим разделением диапазона перемещения на несколько участков, причем каждый участок имеет конкретный размер. Кроме того, размер участка может соответствовать количеству точек данных, связанных с этим участком, процентному отношению перемещения, связанному с участком, результату абсолютного измерения (например, углу вращения), связанному с участком, количеству времени, в течение которого на конкретном участке собирались данные измерения процесса, равно как и другим способам разделения диапазона перемещения, известным специалистам в данной области. Как показано на Фиг.3, график 120, приводимый ради примера, включает участки 121-128. В этом частном примере диапазон 0%-80% перемещения разделен на восемь неперекрывающихся сегментов равного размера. Однако в некоторых возможных вариантах реализации могут включаться участки разных размеров. Например, в некоторых приложениях предусмотрено, что некоторые диапазоны перемещения могут связываться с более высокой вероятностью отказа. Например, операторы или изготовители могут обнаружить на основании теоретических или эмпирических данных, что некоторые клапаны с выдвижным штоком более склонны к поломке в диапазоне 40-50% перемещений после продолжительной эксплуатации. Затем оператор может решить определить сегменты таким образом, чтобы в диапазоне 40-50% перемещения имелось больше сегментов, чем в других диапазонах. Так оператор может разделить диапазон 40-50% перемещения на пять отдельных участков, определив в то же время только один участок на 30-40% диапазона перемещения. Дополнительно оператор может выделять по меньшей мере частично перекрывающиеся сегменты, например, чтобы улучшить надежность определенных статистических выводов. Хотя примеры, обсуждающиеся ниже, касаются только неперекрывающихся сегментов равного размера, предусмотрено, что в некоторых приложениях диапазон перемещения может включать перекрывающиеся сегменты разного размера, или как равного, так и разного размера.
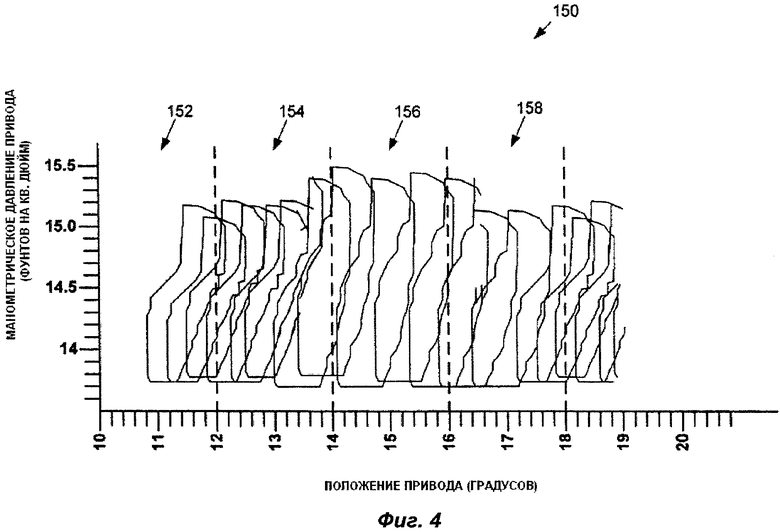
Между тем диапазон перемещения типового поворотного клапана может разделяться на множество участков, отвечающих фиксированному или варьирующемуся углу поворота в градусах. Фиг.4 иллюстрирует график 150 давления привода относительно положения привода для типового поворотного клапана. Аналогично клапану с выдвижным штоком подвижной элемент поворотного клапана функционирует, проходя при изменении направления перемещения через зону трения, в которой приложенное давление в значительной мере увеличивается или уменьшается при незначительном перемещении подвижного элемента клапана или при отсутствии перемещения. Как и в случае клапана с выдвижным штоком, график давления привода относительно радиального положения привода включает несколько по существу вертикальных линий. Эти линии отвечают зонам трения, в которых в ответ на изменение давления привода происходит только незначительное перемещение или перемещение вообще отсутствует. В соответствии с доступным способом измерения трения в клапане результаты обработки данных, связанных с полным доступным диапазоном перемещения, обрабатываются для получения значения среднего трения. Однако поворотный клапан может испытать трение в диапазоне между 10 и 12 градусами, показано как участок 152 на Фиг.4, которое по существу отличается от трения, испытываемого, например, в диапазоне от 14 до 16 градусов. Более того, на каждом из участков 152-158 значение трения может существенно отличаться от среднего давления, связанного с графиком 150. Например, трение на участке 152 может быть слишком мало, а на участке 156 может быть слишком велико. Между тем среднее трение в поворотном клапане, полученное из графика 150, представленное в виде одного неразделенного множества данных, может быть равно или допустимо близко значению, указывающему на нормальное состояние клапана.
Чтобы правильно выявить локальные неисправности, рассчитать разницу между различными сегментами перемещения и получить другие характеристики работы клапана, оценивающий блок 30 может отдельно рассчитать такие параметры, как трение, мертвая зона, кручение вала и так далее, для некоторых или всех сегментов 121-128 или 152-158. В некоторых вариантах реализации уполномоченный пользователь может сконфигурировать в оценивающем блоке 30 множество сегментов, связанных с доступным диапазоном перемещения. При необходимости пользователь может задать размер и границы каждого сегмента. В некоторых вариантах реализации пользователь может также уточнить, в каком, а не во всех, одном или более сегментов должно проводиться вычисление. Однако ожидается, что большинство операторов по существу предпочтут обработать все доступное множество данных, чтобы уменьшить вероятность просмотра, по оплошности, сегмента или поддиапазона перемещения, в котором возникает неисправность.
Оценивающий блок 30 может многократно обрабатывать поэтапно данные, соответствующие каждому сегменту 121-128 или 152-158, для выявления свойственного каждому сегменту значения трения, мертвой зоны, мертвого времени, кручения вала и т.п. Говоря о точках данных, формирующих графики 100 и 120, следует заметить, что более вертикальные участки графиков представляют области, на которых в ответ на существенное увеличение давления привода происходило только незначительное перемещение привода или перемещение вовсе отсутствовало. Таким образом, для данного сегмента перемещения исключаются точки данных в пределах зоны трения, чтобы в результате оставить данные, по существу соответствующие тому, который граничит с зоной трения, или тому, который находится вне зоны трения. Подход к выбору сокращенного множества данных незначительно отличается в зависимости от того, является ли клапан клапаном с выдвижным штоком или поворотным клапаном. В клапане с выдвижным штоком скользящий шток в пределах зоны трения обычно неподвижен. В результате для этих типов клапанов сокращенное множество данных может быть сформировано с включением только тех точек, в которых действительно происходит перемещение привода. Точка может быть включена в это множество, например, если разность между положением привода в данной точке и положением привода в предыдущей точке превышает некий заранее заданный порог. Например, если разность положений привода в двух последовательных точках превышает 0,01% полного перемещения, вторая точка может быть выбрана в качестве некоторой точки в сокращенного множества данных (т.е. при этом привод действительно перемещается). Разумеется, вместо способа, основанного на создании сокращенного множества данных, можно применить любой необходимый порог или любой другой способ выявления перемещения привода.
Для поворотного клапана данные, выходящие за пределы зоны трения, или пограничные с зоной трения, могут определяться оценкой одного или более условий. Во-первых, для каждой точки можно рассчитать наклон кривой давления привода относительно положения привода и затем сравнить его с пороговым значением. Наклон, отвечающий точке, можно рассчитать, взяв наклон от точки к точке (методом приращений) для данной точки (т.е. из наклона линии, построенной между рассматриваемой точкой и предыдущей или последующей точкой), взяв наклон линии, построенной способом наилучшего соответствия (такой как линия, построенная на основе анализа способом наименьших квадратичных ошибок), определенной для рассматриваемой точки и двух или более соседних точек, или любым другим необходимым способом. Если рассчитанный наклон - для точки меньше порогового значения, тогда эта точка может быть выбрана для сокращенного множества данных, поскольку данная точка находится вне зоны трения. С другой стороны, если наклон превышает пороговое значение для наклона, тогда измерительная точка находится в пределах зоны трения и может быть отброшена. При необходимости порог наклона может быть установлен заранее или предопределен (например, оператором) или может быть выведен как функция наклона линии, построенной способом наилучшего соответствия (например линии, построенной способом наименьших квадратичных ошибок) для всех собранных данных.
Далее, может быть рассчитано изменение давления между двумя последовательными точками, и если изменение давления превышает заранее определенный порог, например 0,05%, тогда точку считают находящейся в пределах зоны трения. Понятно, что для вынесения суждения о том находится ли данная точка в пределах зоны трения, может применяться одно или более из этих условий. Так, например, если превышен либо порог по наклону, либо порог по давлению, считают, что точка находится в зоне трения, и ее отбрасывают. Альтернативно, точка может рассматриваться находящейся в пределах зоны трения, только если превышены пороги и по наклону, и по давлению. Более того, при необходимости для клапанов с выдвижным штоком может применяться или один, или оба этих подхода.
После генерирования сокращенного множества данных, как было описано выше, оставшиеся точки данных обычно попадают в один или два кластера, граничащих с зоной трения устройства клапана. После того как сформировано сокращенное множество данных, полезно исключить данные из тренда, т.е. удалить все линейные тренды, обусловленные, например, усилием пружины привода (которое изменяется в диапазоне перемещения привода). Существует много подходов к оценке линии наилучшего соответствия данных для исключения данных из тренда. Например, один из подходов состоит в расчете линии наилучшего соответствия по всем данным сокращенного множества данных. В других случаях могло бы стать предпочтительным выделить отдельную линию наилучшего соответствия для данных по обе стороны зоны трения, т.е. применить процедуру формирования линии наилучшего соответствия отдельно для обоих кластеров. Далее, обычный специалист в данной области поймет, что для анализа данных могут применяться различные альтернативные способы сокращения множества данных, исключения данных из тренда, расчета линии наилучшего соответствия, а также альтернативные приемы статистики.
После сокращения данных, связанных с одним или более из сегментов, и/или исключения их из тренда оценивающий блок 30 может оценить параметр процесса, свойственный данному сегменту. Например, в оценивающем блоке 30 можно получить трение в клапане с выдвижным штоком в 20-30% диапазона перемещения при применении способа, раскрытого в патенте США №6466893, или при применении иного способа для полного или сокращенного множества данных. Оценивающий блок 30 может затем передать результаты расчета оценок, свойственных данному сегменту, на дисплейный блок 38 или любое другое устройство вывода данных. На Фиг.5 показана гистограмма 200, которая включает столбцы 201-208. Каждый из столбцов 201-208 соответствует одному из сегментов 151-158 на графике 150, показанном на Фиг.3. В частности, высота каждого столбца может отражать значение трения, связанного с сегментами перемещения. Следует принять во внимание, что гистограмма 200 наглядно представляет трение в сегментах, свойственное каждому из сегментов 151-158 в легкой для восприятия форме. Быстро взглянув на гистограмму 200, оператор может немедленно заподозрить, что клапан 18 может «залипнуть» в сегменте 204 или что уплотнение клапана 18 возможно нарушено на участках 201-203 и 208. Оператор может физически обследовать клапан, сравнить каждый из потенциально дефектных сегментов с заранее определенным значением или предпринять другое подходящее действие, чтобы подтвердить или опровергнуть подозрение.
Дополнительно дисплейный блок 38 может показывать график 120 вместе с гистограммой 200, чтобы оператор мог визуально подтвердить предварительные результаты, которые он или она отметили на гистограмме с особенно высокими или низкими столбцами. Продолжая обсуждение вышеприведенного примера, оператор или инженер могут захотеть подтвердить, что столбец гистограммы 204 действительно соответствует той части графика 150, в которой кластеры измерительных точек образуют более горизонтальные участки графика, отделенные друг от друга на большее расстояние, чем в других сегментах. Разумеется, график 150 показывает полное множество данных, включая точки, связанные с зонами трения, и на нем не отражено исключение из тренда. Однако оценивая общую форму графика 150, оператор, тем не менее, может узнать, что кластеры точек, которые выглядят растянутыми по вертикали, проявляют большую тенденцию показывать более высокие значения трения (если ось ординат выбрана для давления, а ось абсцисс выбрана для перемещения).
В другом варианте реализации оценивающий блок 30 хранит пороговые значения, связанные полностью или частично с перечисляемыми параметрами, а именно трением, мертвой зоной, мертвым временем и кручением вала. Предпочтительно оценивающий блок 30 хранит допустимые нижние пределы и допустимые верхние пределы значения, чтобы быть в состоянии определить как избыточные, так и недостаточные значения данных параметров процесса. Например, оценивающий блок 30 может хранить в качестве верхнего предела значения силы трения 1100 фунтов (5,0 кН), а в качестве нижнего предела значения трения 300 фунтов (1,3 кН). При работе оценивающий блок 30 может опознать каждый из столбцов гистограммы 201-208 с высотой вне диапазона 300-1100 фунтов. При анализе типовой гистограммы 200, показанной на Фиг.5, оценивающий блок 30 может поэтому определить, что участки, соответствующие столбцам 201, 202, 204 и 207, имеют неприемлемые значения трения. В ответ на обнаружение одного или более таких значений оценивающий блок 30 может подать аварийный сигнал, войти в журнал регистрации событий, выдать сообщение оператору или осуществить аналогичные операции.
В некоторых вариантах реализации оценивающий блок 30 может дополнительно рассчитать всеобщее среднее значение, связанное с диапазоном перемещения, включающим все сегменты 121-128 клапана с выдвижным штоком и сегменты 152-158 поворотного клапана. В некоторых случаях может оказаться необходимым обнаруживать, какие участки перемещения подвижной части, если таковые обнаружатся, отличаются от общего среднего значения на определенное количество стандартных отклонений, например. С этой целью оценивающий блок 30 может рассчитать значение среднего трения в релевантном диапазоне перемещения, сравнить трение в каждом индивидуальном сегменте со значением среднего трения, чтобы вычислить стандартное отклонение и идентифицировать те сегменты, которые значимо отличаются от среднего и от остальных сегментов. Этот подход может быть полезным, например, при исследовании характеристик износа устройства.
Еще в одном варианте реализации дисплейный блок 38 может формировать изображение самого высокого и самого низкого столбца гистограммы в цвете, отличающемся от цвета остальной гистограммы 200. Этим способом дисплейный блок 38 может фиксировать внимание оператора на релевантных (т.е. потенциально неисправных) участках гистограммы. Таким образом, оператор, ответственный за большое количество контуров 10, клапанов 18 или другие устройства с подвижными компонентами, может быстро отметить возможные неисправности, даже обращая относительно мало внимания на консольный монитор. Разумеется, чтобы привлечь внимание персонала к значениям, по существу отличающимся от нормы или от среднего значения, связанного с конкретным устройством, оценивающий блок 30, дисплейный блок 38 и другие компоненты могут предоставлять информацию другими визуальными или аудиосредствами.
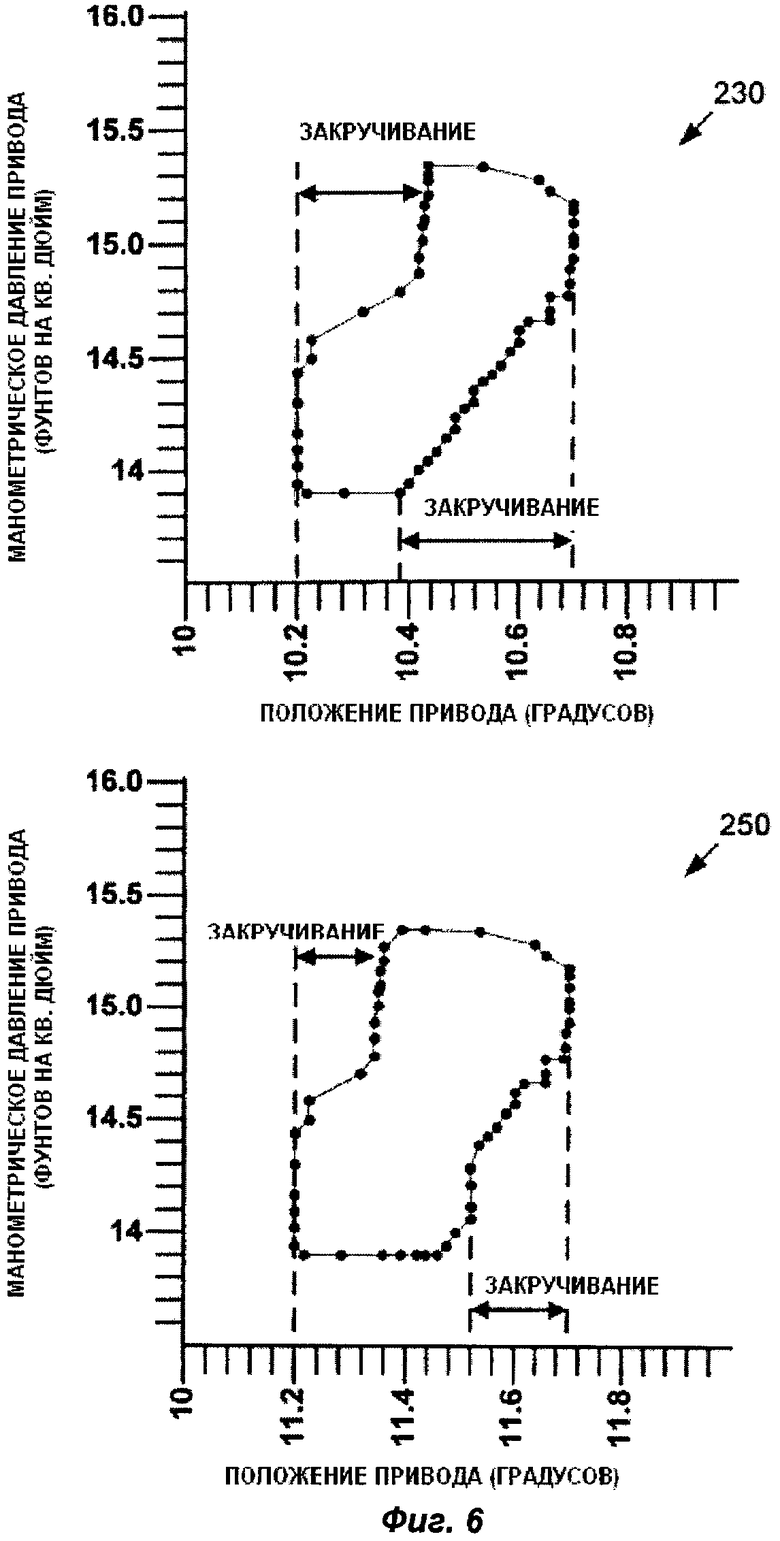
Как было показано ранее, способ, обсуждавшийся выше, по отношению к оценке трения также может быть применим для расчета других технологических параметров, например таких, как кручение вала. На Фиг.6 показаны два графика давления привода относительно перемещения привода для поворотного клапана при одном полном проходе через зону трения. В частности, график 230 содержит точки данных, соответствующие приблизительно 10,2-10,7 градусам перемещения данного поворотного клапана. Между тем, график 250 иллюстрирует перемещение в том же клапане между приблизительно 11,2 и 11,7 градусов. Как показано на Фиг.6, кручение вала представляет собой перемещение элемента клапана, осуществляющееся до достижения максимального (или минимального) значения давления привода, что вызывает непрерывное перемещение элемента клапана. При беглом рассмотрении Фиг.6 видно, что графики 230 и 250 имеют различную геометрическую форму. В частности, график 250 включает крутой наклон участка, в котором происходит кручение вала. Так, оператор может распознать, что форма кривой, которая выглядит более вытянутой в горизонтальном направлении, соответствует большему значению кручения. Разумеется, как показано на Фиг.4, оценивающий блок 30 предпочтительно собирает или иным образом получает данные о многократных рабочих циклах.
Так, после сбора данных о давлении привода относительно перемещения привода для клапана оценивающий блок 30 может рассчитать кручение вала для любого конкретного случая и затем оценить кручение вала, связанное с конкретным сегментом перемещения, как среднее или медиана из всех событий кручения вала в данном сегменте. Для детектирования кручения вала в любом частном случае оценивающий блок 30 может отслеживать наклон кривой давления привода относительно перемещения привода. Кручение вала обычно начинается, когда величина наклона по существу возрастает (или начинает превышать некоторую величину), и заканчивается, когда величина наклона по существу уменьшается (или становится меньше некоторой величины). Как необходимо понимать, перемещение при перемещении привода (обычно выражаемое в процентах от полного перемещения) между начальной и конечной точкой представляет для данного конкретного случая кручение вала.
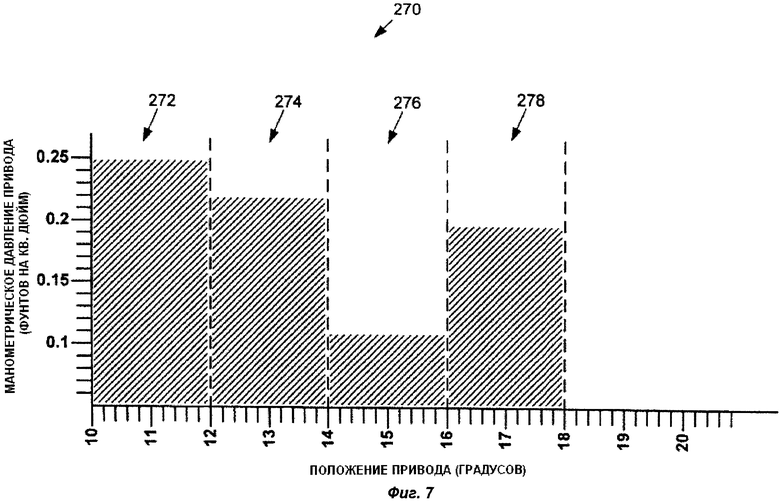
После оценки значений кручения вала для одного или более сегментов перемещения дисплейный блок 38, рабочая станция 42 или другое устройство, содержащее дисплей, может предоставить результаты графически, например в виде гистограммы 270 (Фиг.7). Каждый из столбцов 272-278 может соответствовать определенной части перемещения. В примере, иллюстрируемом Фиг.7, столбец 276 выглядит по существу ниже, чем столбики 272, 274 и 278. Проверяя гистограмму 270, оператор может немедленно заключить, что по крайней мере, кручение вала поворотного клапана неодинаково для каждого участка перемещения. Оператор затем может в ручном режиме проверить, указывает ли столбец 272 на неприемлемо низкое кручение вала на участке перемещения между 14 и 16 градусами, или указывают ли столбцы 272, 274 и 278 на избыточно высокие значения кручения.
Аналогичным образом способ может быть применим для оценок мертвого времени и мертвой зоны для клапана с выдвижным штоком, поворотного клапана или другого устройства, содержащего компонент, движущийся в заданном диапазоне перемещения. Например, оценивающий блок 30 может рассчитать мертвую зону, связанную с конкретным участком перемещения, предположив, что появление мертвой зоны по существу вызывается трением и делением оценочного значения трения в сегменте на усилие в открытом контуре устройства. Свойственные сегменту оценки мертвой зоны устройства могут быть схожим образом отображены в форме гистограммы, автоматически сравниваться с одним или более пороговыми значениями и/или обрабатываться статистически для определения среднего значения и стандартного отклонения. Дополнительно, оценивающий блок 30 может подать аварийный сигнал для одного или более сегментов, значительно отличающихся от заданных значений или рассчитанного среднего значения.
Дополнительно оценивающий блок 30 может генерировать оценки мертвого времени, свойственные сегменту клапана 18 или другого подвижного компонента устройства, функционирующего в контуре 10. В этом случае оценивающий блок 30 может провести кросс-корреляционный анализ входного сигнала (такого как тот, который вырабатывается в контроллере 12 и измеряется датчиком 32 на Фиг.1) и перемещения привода или сигнала положения (такого как тот, который измеряется датчиком положения 37 на Фиг.1). Оценивающий блок 30 может выполнить указанный или другой тип статистического корреляционного анализа для данного перемещения для определения сдвига по времени между входным и выходным сигналами.
Кроме расчета параметров процесса, свойственных сегменту контура 10 для данного множества измерений, оценивающий блок 30 может также для одного или более параметров генерировать данные тренда. Более конкретно оценивающий блок 30 может хранить измерения, относящиеся к одному или более из следующего: трение, кручение вала, мертвое время и мертвая зона за существенно длительный период времени (сутки, месяцы, года и т.п.). В некоторых рассматриваемых вариантах реализации оценивающий блок 30 включает или кооперируется с постоянной памятью, такой как запоминающий блок 44. После получения данных измерений, свойственных данному сегменту, оценивающий блок 30 может хранить данные измерений в постоянной памяти с временной меткой. Альтернативно оценивающий блок 30 может периодически генерировать и хранить "моментальные снимки" некоторых или всех рассчитанных параметров процесса, свойственных данному сегменту. Предпочтительно оценивающий блок 30 сохраняет трение и другие параметры для каждого сегмента перемещения, чтобы дать возможность прослеживания тренда во времени для указанных сегментов.
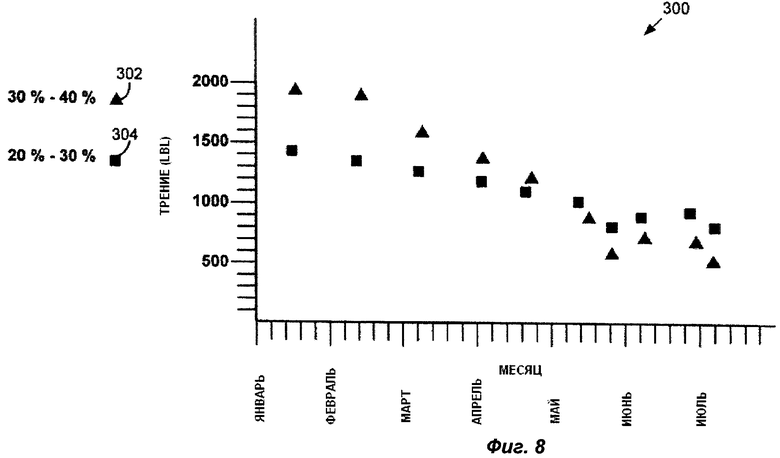
Оценивающий блок 30 затем может, в ответ на запрос оператора, например, через входной устройство, 40 нанести на график данные тренда для одного или более сегментов. Альтернативно оценивающий блок 30 может по данным создать график тренда по истечении времени, заданного таймером, и согласно некоторому заранее определенному плану. Следует принять во внимание, что усредненные данные для конкретного сегмента могут выдавать неочевидную информацию о приводе клапана или некоторой другой подвижной части как, например, средняя скорость износа за заданный период времени, неожиданно незначительные или сильные изменения за период времени и так далее. Дополнительно данные по тренду для некоторых сегментов могут применяться для обнаружения одного сегмента или сегментов, которые, вероятно, изнашиваются быстрее, чем остальные сегменты или заданного целевого рейтинга. На Фиг.8, график 300 иллюстрирует измерения трения для двух сегментов перемещения привода в тренде за период шесть месяцев. В этом примере символ 302 обозначает средние результаты измерений, соответствующие сегменту перемещения между 30 и 40%, а символ 304 отвечает средним результатам измерения от 20 до 30% перемещения для произвольного клапана с выдвижным штоком.
Следует принять во внимание, что типовой график 300 иллюстрирует более быструю потерю трения на 30-40% сегмента перемещения. Как показано на Фиг.8, по измерениям первоначальное трение для данного сегмента, по-видимому, по существу превышает трение для сегмента на 20-30% перемещения. Однако трение на этом сегменте падает от приблизительно 1900 фунтов (8,5 кН) в январе до около 500 фунтов (2,2 кН) в июле, в то время как трение, связанное с сегментом на 20-30% перемещения, падает от около 1500 фунтов (6,7 кН) до около 700 фунтов (3,2 кН). Наблюдая тренд, иллюстрируемый на графике 300, оператор или инженер могут заключить, например, что износ подвижного компонента (или неподвижного компонента, соприкасающегося с подвижным компонентом) более выражен на сегменте 30-40% перемещения. Обычный специалист в данной области дополнительно примет во внимание, что инженеры могут применить эти данные для улучшения конструкции устройства или подвижных компонентов в этом устройстве в будущем.
С другой стороны, данные по тренду, собранные и обобщенные графиком для единичного сегмента перемещения, могут также дать важную информацию, такую как приблизительное измерение скорости, с которой параметр устройства меняется во времени. В плане продолжения обсуждения примера по трению, иллюстрируемого Фиг.8, оценивающий блок 30 может рассчитать линию наилучшего соответствия (не показана) для всех измерений, обозначенных на Фиг.8 символом 302. Наклон линии наилучшего соответствия даст оценку скорости потери трения, связанного с сегментом на 30-40% перемещения. Разумеется, оценивающий блок 30 может также применить другие статистические способы для построения тренда, связанного с индивидуальным сегментом, для выявления скорости изменения и других характеристик соответствующего тренда.
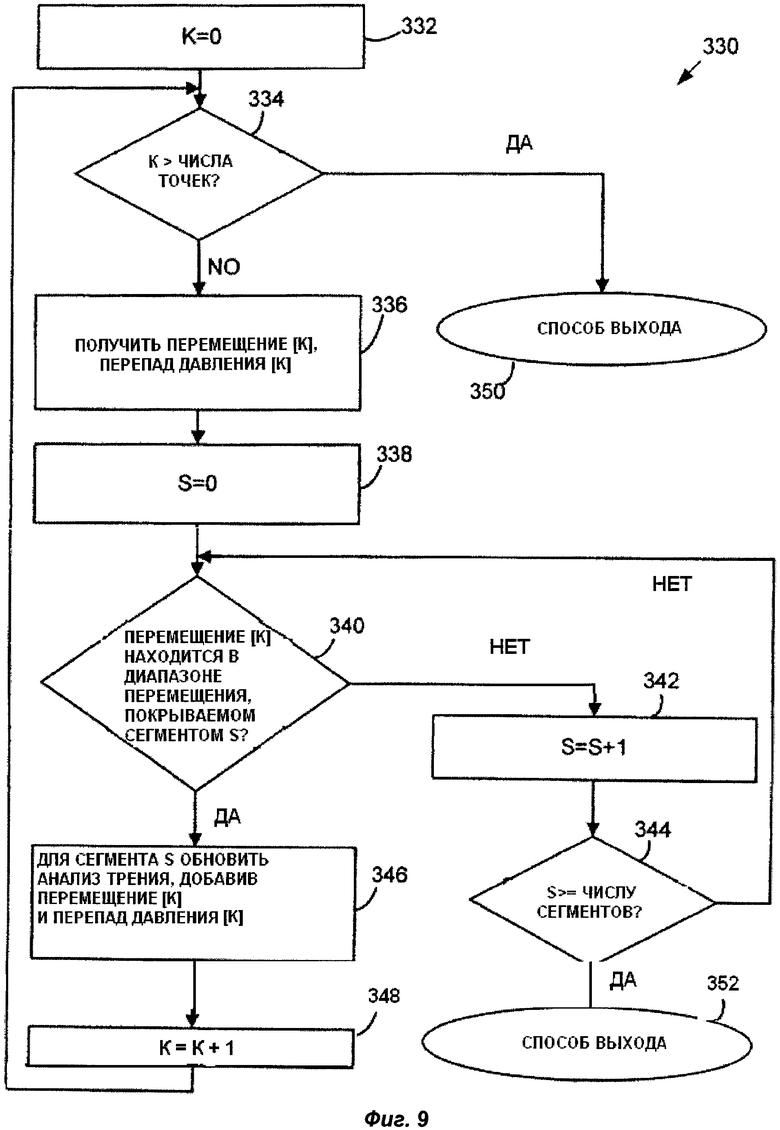
На Фиг.9 показана блок-схема системной программы 330, которая может выполняться оценивающим блоком 30 для определения трения в каждом из нескольких сегментов привода клапана. Обычный специалист в данной области техники примет во внимание, что системная программа 330 может также запускаться на рабочей станции 42, на компьютере, коммуникативно связанном с управляющим контуром 10, или на автономном компьютере, или ином оснащенном процессором устройстве, способном получать данные измерения процесса через накопитель памяти, проволочный или беспроволочный модем или через иное коммуникативное устройство, сохраняющее информацию, известное в данной области техники. Как показано выше, системная программа 330 также может составлять часть программного обеспечения, отвечающего в управляющем контуре 10 или клапане 18 за другие контрольные функции и операции технического обслуживания. Например, пакет программ AMS ValveLink® компании Emerson Process Management может включать в качестве компонента системную программу 330. Дополнительно следует принять во внимание, что системная программа 330 может обрабатывать данные, поступающие из контура 10, как правило, в реальном времени или, альтернативно, может осуществлять отложенную обработку данных, поступивших из датчиков 32-37 и хранящихся, например, в запоминающем блоке 44. Более того, системная программа 330 может во время работы сообщаться с внешним запоминающим блоком и получать оттуда данные измерений.
Как правило, системная программа 330 может извлекать данные о давлении и положении привода из списка массивов или связанного списка. В одном из рассматриваемых вариантов реализации оценивающий блок 30 или запоминающий блок 44 могут сохранять эти данные в двухмерных массивах, индексированных таймером в относительном или абсолютном времени. Например, в массиве может храниться множество кортежей, причем каждый кортеж включает измерение давления привода и положения привода, собранные в одной и той же временной точке. Как показано на Фиг.9, системная программа 330 может просматривать массив и обновлять соответствующие оценки трения, свойственные сегменту, причем информация вносится в текущий элемент массива. В частности, системная программа 330 может инициализировать счетчик массива k в блоке 332. Затем системная программа может выполнять итерации в некоторых или во всех блоках 334-348 столько раз, сколько элементов данных о давлении и положении хранится в массиве.
В блоке 334 программа 330 может проверять, не превысило ли текущее значение счетчика k размер массива. Затем программа 330 может прочитать кортеж давление/положение из единичного или множественного массива в блоке или на стадии 336. В примере программы, иллюстрируемой Фиг.9, данные о положении привода механизма хранятся в массиве перемещения, а данные о давлении привода хранятся в аналогичном образом индексированном массиве дифференциального давления. Однако данные о давлении, о положении привода также могут сохраняться в единственном двухмерном массиве. Предпочтительно, но не обязательно, каждый кортеж, извлеченный на стадии 336, соответствует положению привода и давлению привода, измеренному через постоянный интервал относительно предыдущего кортежа, извлеченного на стадии 336. Иными словами, оценивающий блок 30 предпочтительно собирает данные о положении и давлении с постоянной скоростью.
В блоке 338 программа 330 инициализирует счетчик сегментов s до 0. Алгоритм 300 затем проходит через сегменты, проверяя, какому сегменту принадлежит элемент массива, индексированный текущим значением k (блоки 340-344). В одном возможном варианте реализации алгоритма 330 каждый сегмент включает одинаковое количество кортежей давление/положение. Альтернативно программа 330 может извлекать определение сегментов, включая количество сегментов и/или границы каждого сегмента из постоянной или энергозависимой памяти, как часть конфигурационных данных. В качестве еще одной альтернативы программа 330 может получать определение сегментов в виде входных параметров. Пользователь может вводить эти параметры через устройство 40 ввода или рабочую станцию 42.
Как только программа 330 приводит в соответствие кортеж давление/положение с одним из сегментов, программа 330 может обновить среднее значение трения, свойственное данному сегменту в соответствии с данными, включенными в кортеж (блок 346). Алгоритм 330, например, может быть применяться по отношению к вышеописанным на Фиг.2-5 способам. Программа 330 может тогда прирастить значение k в блоке 348 и возвратиться к блоку 334 для следующей итерации. Если счетчик k превышает размеры массива, или если количество сегментов превышает заданный, заранее определенный или иначе указанный предел, программа 330 заканчивается (блоки 350 и 352).
Также необходимо принимать во внимание, что оценивающий блок 30 может рассчитать значения мертвой зоны, мертвого времени и кручения вала, свойственные сегменту, применяя логику, аналогичную для программы 330. Для этой цели оценивающий блок 30 может включать дополнительные программы или может содержать логику для оценки мертвой зоны, мертвого времени и кручения вала как часть программы 330.
Несмотря на то что настоящее изобретение описано со ссылкой на конкретные примеры, которые приводятся только в иллюстративных целях и не должны ограничивать объем притязаний изобретения, обычному специалисту в данной области будет очевидно, что по отношению к описанным вариантам реализации можно сделать изменения, дополнения или изъятия, не выходя из пределов идеи и объема притязаний изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АНАЛИЗА И ДИАГНОСТИКИ КРУПНОМАСШТАБНЫХ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ | 2012 |
|
RU2607237C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПОЛЕВЫМ УСТРОЙСТВОМ | 2015 |
|
RU2685241C2 |
| Способ автоматического управления загрузкой файнштейна в мельницу | 2023 |
|
RU2819227C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС МНОГОКАНАЛЬНОЙ ДИАГНОСТИКИ И МОНИТОРИНГА ДЛЯ ДИСТАНЦИОННЫХ ИССЛЕДОВАНИЙ ПАЦИЕНТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2018 |
|
RU2683898C1 |
| КОМПЕНСАЦИЯ КИСЛОРОДОСОДЕРЖАЩИХ ВИДОВ ТОПЛИВА В ДИЗЕЛЬНОМ ДВИГАТЕЛЕ | 2011 |
|
RU2566872C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УСЛОВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМ РЕГУЛЯТОРОМ ДАВЛЕНИЯ | 2014 |
|
RU2661252C2 |
| УСОВЕРШЕНСТВОВАННОЕ УПРАВЛЕНИЕ ТРАЕКТОРИЕЙ СТВОЛА СКВАЖИНЫ | 2015 |
|
RU2670818C9 |
| ОЦЕНКА НАДЕЖНОСТИ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 2005 |
|
RU2398260C2 |
| ДИНАМИЧЕСКИЙ МОНИТОРИНГ МОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745984C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЯ ЦЕЛОСТНОСТИ СЕДЛА КЛАПАНА | 2011 |
|
RU2592146C2 |
Изобретение относится к сетям управления технологическим процессом. Технический результат заключается в повышении точности оценки параметра процесса. Способ определения свойственной сегменту оценки параметра, связанного с управляющим контуром технологического процесса для управления работой одного или более управляющих устройств технологического процесса, таких как клапаны, включает получение данных сигнала, соответствующих сигналу от управляющего контура технологического процесса, хранение данных сигнала, разделение сохраняемых данных сигнала на сегменты сигналов, и выполнение статистического анализа на первом сегменте из указанных сегментов данных, выбранном из указанных сегментов данных, для генерирования первой оценки параметра, свойственной сегменту. 2 н. и 18 з.п. ф-лы, 9 ил.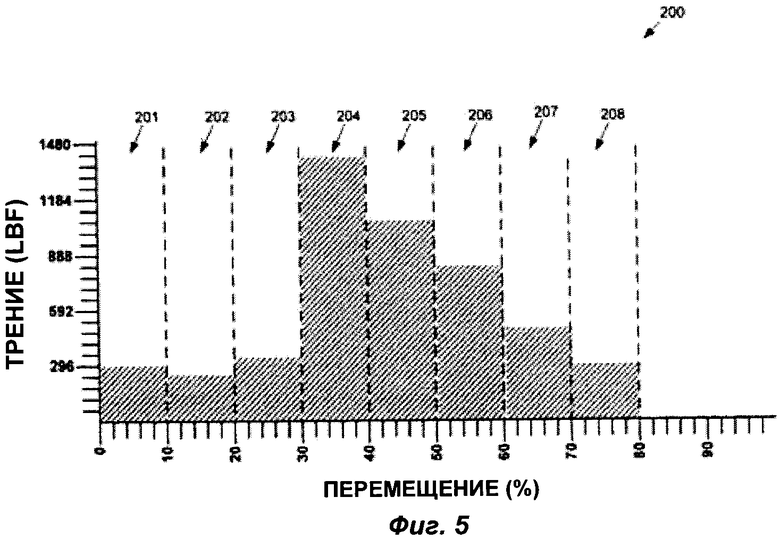
1. Способ определения оценки параметра, связанного с контуром управления технологическим процессом и свойственного сегменту перемещения подвижного элемента, включающий
измерение сигнала внутри контура управления технологическим процессом, когда указанный контур оперативно соединен со средой управления технологическим процессом, включающее:
измерение входного сигнала, указывающего на входной параметр; и
измерение выходного сигнала, указывающего на выходной параметр;
хранение измеренного сигнала в виде последовательности точек данных, каждая из которых содержит первый компонент, производный от входного сигнала, и второй компонент, производный от выходного сигнала;
разделение сохраняемых данных сигнала на сегменты данных;
выполнение статистического анализа по меньшей мере некоторых из сегментов данных и
генерирование множества оценок, свойственных сегменту перемещения подвижного элемента, основанных на выполненном статистическом анализе.
2. Способ по п.1, в котором разделение сохраненных данных сигнала в сегментах данных включает выделение неперекрывающихся сегментов равного размера.
3. Способ по п.2, далее включающий:
сравнение каждой из оценок трения, свойственных сегменту перемещения подвижного элемента, с предельным пороговым значением;
генерирование указания на неисправность в ответ на обнаружение выхода значения оценки трения, свойственной конкретному сегменту перемещения подвижного элемента, за пределы порогового значения.
4. Способ по п.2, далее включающий:
вычисление среднего значения из указанного множества оценок, свойственных сегменту перемещения подвижного элемента;
сравнение каждой оценки из указанного множества оценок, свойственных сегменту перемещения подвижного элемента, со средним значением указанного множества оценок, свойственных сегменту перемещения подвижного элемента;
и
генерирование указания на неисправность в ответ на выявление отклонения более чем на определенную величину по меньшей мере одной оценки из указанного множества оценок, свойственных сегменту перемещения подвижного элемента, от среднего значения из указанного множества оценок, свойственных сегменту перемещения подвижного элемента.
5. Способ по п.2, в котором параметр, связанный с управляющим контуром технологического процесса, представляет собой трение, время простоя, зону нечувствительности или кручение вала, связанные с частью диапазона перемещения привода.
6. Способ по п.2, далее включающий повторение актов измерения сигнала в управляющем контуре технологического процесса, хранение данных сигнала, разделение сохраняемых данных сигнала и выполнение статистического анализа в следующий момент времени для генерирования второй совокупности оценок, свойственных сегменту перемещения подвижного элемента; и
генерирование тренда данных путем сравнения указанного множества оценок, свойственных сегменту перемещения подвижного элемента, с второй совокупностью оценок, свойственных сегменту перемещения подвижного элемента.
7. Способ по п.6, в котором сравнение первого подмножества с вторым подмножеством для генерирования тренда данных включает генерирование данных, свойственных сегменту перемещения подвижного элемента.
8. Способ определения свойственной сегменту перемещения подвижного элемента оценки параметра, связанного с управляющим контуром технологического процесса, включающий:
получение данных сигнала, соответствующих сигналу от управляющего контура технологического процесса;
хранение данных сигнала;
разделение сохраняемых данных сигнала на сегменты данных;
выполнение статистического анализа на первом сегменте из указанных сегментов данных, выбранном из указанных сегментов данных; и
генерирование первой оценки параметра, свойственной сегменту перемещения подвижного элемента, основанной на выполненном статистическом анализе первого сегмента из указанных сегментов данных.
9. Способ по п.8, в котором разделение сохраняемых данных сигнала на сегменты данных включает разделение сохраняемых данных сигнала на неперекрывающиеся сегменты, по существу, одинакового размера.
10. Способ по п.8, далее включающий выполнение статистического анализа на втором сегменте из указанных сегментов данных для генерирования второй свойственной сегменту перемещения подвижного элемента оценки параметра.
11. Способ по п.10, далее включающий предоставление пользователю через дисплейный блок первой и второй оценок параметра, свойственных сегменту перемещения подвижного элемента.
12. Способ по п.11, в котором первая и вторая оценки параметра, свойственные сегменту перемещения подвижного элемента, предоставляемые пользователю через дисплейный блок, включают отображение гистограммы, в которой каждый столбец связан с одним из параметров, свойственных сегменту перемещения подвижного элемента.
13. Способ по п.8, в котором получение сигнала данных, соответствующих сигналу от управляющего контура технологического процесса, включает измерение сигнала в управляющем контуре технологического процесса, если управляющий контур технологического процесса оперативно соединен со средой управления процессом.
14. Способ по п.8, в котором получение данных сигнала, соответствующих сигналу от управляющего контура технологического процесса, включает получение измерений сигнала давления привода и сигнала положения привода из устройства, имеющего привод, перемещающийся в ответ на давление привода и имеющий диапазон перемещения;
причем хранение данных сигнала включает хранение серии кортежей, каждый из которых включает значение давления привода, производное от сигнала о давлении привода, и значение положения привода, производное от сигнала о положении привода.
15. Способ по п.14, в котором первая свойственная сегменту перемещения подвижного элемента оценка представляет собой трение, время простоя, зону нечувствительности или кручение вала, связанные с частью диапазона перемещения привода.
16. Способ по п.15, далее включающий сравнение первой свойственной сегменту перемещения подвижного элемента оценки с пороговым значением для условного генерирования указания на неисправность, которое генерируют, если первая свойственная сегменту перемещения подвижного элемента оценка, по существу, больше или, по существу, меньше порогового значения.
17. Способ по п.8, в котором получение данных сигнала, соответствующих сигналу от управляющего контура технологического процесса, включает получение данных сигнала, соответствующих сигналу, сгенерированному на первый момент времени и на второй момент времени; и
причем выполнение статистического анализа на первом сегменте из указанных сегментов данных включает:
генерирование первого значения, соответствующего первому свойственному сегменту перемещения подвижного элемента параметру на первый момент времени;
генерирование второго значения, соответствующего первому свойственному сегменту перемещения подвижного элемента параметру на второй момент времени, и
сравнение первого и второго значений для определения первого тренда в свойственном сегменту перемещения подвижного элемента параметре.
18. Способ по п.17, в котором первый и второй моменты времени выбраны в соответствии с циклом технического обслуживания, связанным с управляющим контуром технологического процесса.
19. Способ по п.18, в котором цикл технического обслуживания составляет 30 суток или менее.
20. Способ по п.17, далее включающий:
выполнение статистического анализа на втором сегменте из указанных сегментов данных для генерирования второй свойственной сегменту перемещения подвижного элемента оценки параметра;
генерирование третьего значения, соответствующего второй свойственной сегменту перемещения подвижного элемента оценке параметра на первый момент времени;
генерирование четвертого значения, соответствующего второй свойственной сегменту перемещения подвижного элемента оценке параметра на второй момент времени;
сравнение первого и второго значений для определения второго тренда во втором свойственном параметре.
| RU 2005141148 А, 27.05.2006 | |||
| US 5687098 A1, 11.11.1997 | |||
| US 5966679 A1, 12.10.1999 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Устройство для стимуляции перемещения зубов | 1988 |
|
SU1725919A1 |

