Изобретение относится к устройству обеспечения маневрирования автотранспортного средства на склоне.
Из документа FR 2828450, приведенного в данном описании в качестве ссылки, известно такое устройство обеспечения маневрирования. В основном оно содержит средство оценки наклона склона, на котором находится транспортное средство, средство для интерпретации действий водителя, средство для определения характеристической кривой сцепления транспортного средства (то есть кривой соответствия между положением педали сцепления и моментом, передаваемым сцеплением) и средство для автоматической деактивации средства торможения транспортного средства. Благодаря этим средствам, автотранспортное средство можно удерживать в положении на склоне в состоянии, в котором ведущие колеса отключены от двигателя, и можно привести в движение (в направлении подъема склона) простыми действиями водителя на педали акселератора и сцепления (то есть при этом ему нет необходимости воздействовать на стояночный тормоз). Особенность работы устройства обеспечения маневрирования состоит в отключении торможения, как только крутящий момент, передаваемый на колеса, становится достаточным, чтобы компенсировать усилие, действующее на транспортное средство и связанное с крутизной склона и с силой земного притяжения.
Этот тип устройства имеет много преимуществ с точки зрения простоты и удобства вождения. Однако он имеет два следующих недостатка.
Прежде всего, существует проблема трогания с места в случае небольшого склона или на ровной дороге. Согласно вышеизложенному, для отпускания тормоза ожидают, когда на ведущие колеса будет передаваться достаточный момент. Очевидно, что эта стратегия может привести к появлению странного ощущения у водителя и пассажиров транспортного средства. Перед отключением тормоза появляется ощущение напряжения в элементах, связывающих транспортное средство с землей. Это ощущение кажется странным, так как оно не возникает в классическом транспортном средстве, в котором перед включением сцепления отпускают стояночный тормоз. Действительно, создание этого напряжения в элементах соединения с землей не является необходимым, так как на небольшом склоне или на ровном месте транспортное средство остается неподвижным или почти неподвижным под действием трения и сопротивления качению даже в состоянии отключенного сцепления и отключенной тормозной системы.
Наконец, вышеупомянутое устройство обеспечения маневрирования требует переходной фазы в начале движения, во время которой это устройство не работает или работает не в достаточной мере и во время которой это устройство записывает данные, необходимые для построения характеристической кривой, показывающей момент, передаваемый сцеплением, в зависимости от положения педали сцепления. Эту характеристическую кривую используют в дальнейшем для определения момента времени, в который должна подаваться команда на отключение тормоза. Как правило, эта кривая является строго монотонной. Однако, в определенный момент во время переходной фазы накопления данных, записанные данные определяют не монотонную характеристическую кривую, которая может привести к ухудшению надежности устройства обеспечения и помешать его нормальной работе, если использовать эту кривую. Кроме того, эта фаза сбора данных является достаточно продолжительной, в частности, при сборе данных в зоне повышенных моментов сил. Следовательно, устройство обеспечения не может быть использовано быстро и, в частности, в случае, когда оно необходимо больше всего, то есть в ситуации крутого склона, когда для трогания с места транспортного средства требуется большой крутящий момент.
Настоящее изобретение относится также к способу обработки данных, позволяющему избежать вышеупомянутых недостатков и усовершенствовать известные способы обработки. В частности, предлагается способ обработки данных, позволяющий избежать появления напряжения в элементах соединения с землей транспортного средства, когда оно находится на небольшом склоне или на ровном месте, и обеспечивающий большую надежность устройства обеспечения маневрирования во время переходной фазы сбора данных для характеристики сцепления.
Для этого способ в соответствии с настоящим изобретением обеспечивает обработку данных, записанных на этапе сбора данных, причем эти данные определяют отношение соответствия между значениями моментов, передаваемых сцеплением, и значениями положений органа управления сцеплением. Способ обработки данных содержит этап изменения записанных данных для определения измененного отношения соответствия между значениями моментов, передаваемых сцеплением, и значениями положений органа управления сцеплением, при этом указанное измененное отношение соответствия предназначено для использования в устройстве обеспечения маневрирования на склоне транспортного средства, оборудованного силовой установкой, соединенной с ведущими колесами через кинематическую цепь, содержащую сцепление и систему торможения, при этом устройство обеспечения маневрирования автоматически управляет отключением системы торможения.
Этап изменения записанных данных может содержать операцию замещения наименьшего значения положения органа управления сцеплением значением замещения, меньшим замещаемого значения.
Значение замещения может превышать или быть равным заранее определенному значению.
Этап изменения данных может содержать операцию добавления данных.
Операция добавления данных может содержать добавление двух пар значений положений органа управления сцеплением и значений моментов таким образом, чтобы добавляемые значения моментов превышали записанные значения моментов и чтобы добавляемые значения положений органа управления сцеплением превышали значения положений органа управления сцеплением, записанные во время этапа сбора данных.
Носитель данных в соответствии с настоящим изобретением содержит алгоритм для применения вышеуказанного способа обработки.
Согласно изобретению, устройство обеспечения маневрирования на склоне транспортного средства содержит аппаратные и программные средства для применения вышеуказанного способа обработки.
Согласно изобретению, автотранспортное средство содержит вышеуказанное устройство обеспечения маневрирования.
Ниже описан вариант выполнения устройства обеспечения маневрирования в соответствии с настоящим изобретением и вариант осуществления способа обработки данных в соответствии с настоящим изобретением.
Настоящее изобретение поясняется чертежами, на которых представлено следующее:
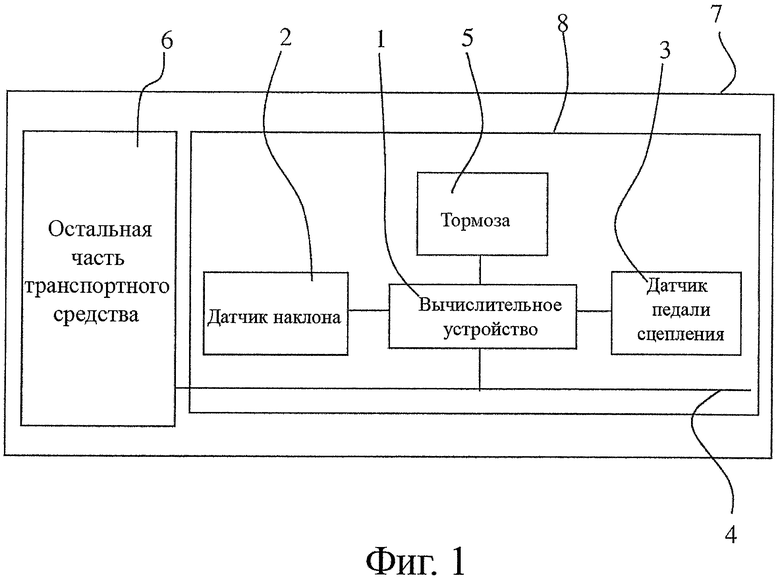
фиг.1 - схема транспортного средства, оборудованного устройством обеспечения маневрирования в соответствии с настоящим изобретением;
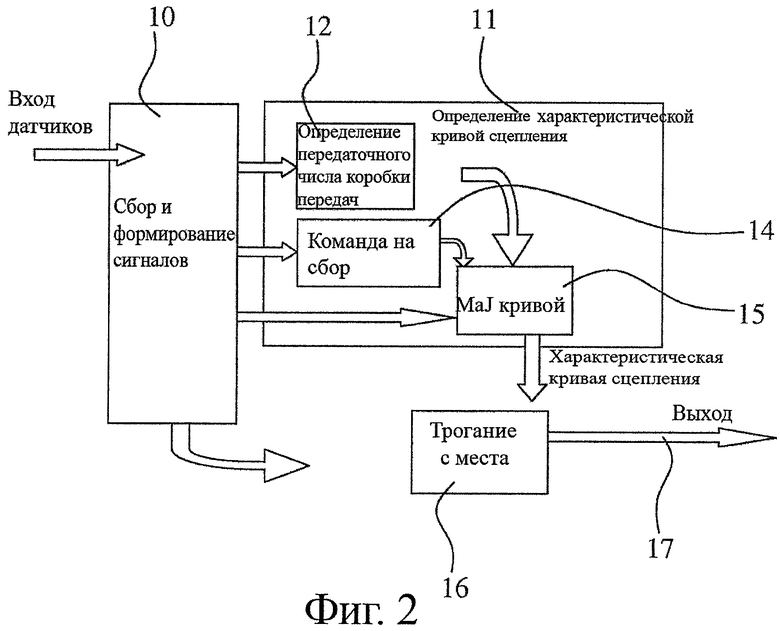
фиг.2 - блок-схема общей работы устройства обеспечения маневрирования в соответствии с настоящим изобретением;
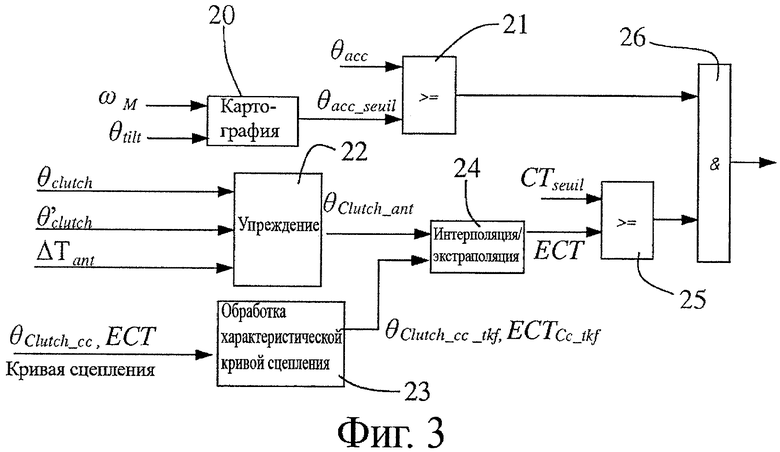
фиг.3 - блок-схема работы блока «трогания с места», показанного на фиг.2;
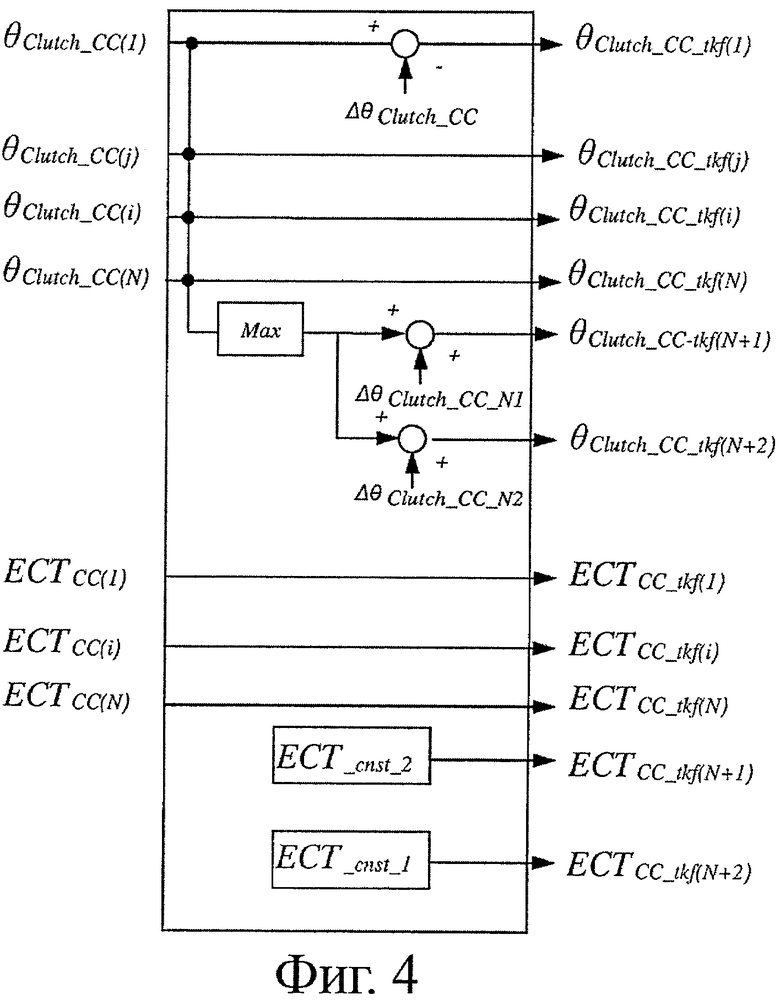
фиг.4 - диаграмма, иллюстрирующая вариант осуществления способа обработки данных в соответствии с настоящим изобретением;
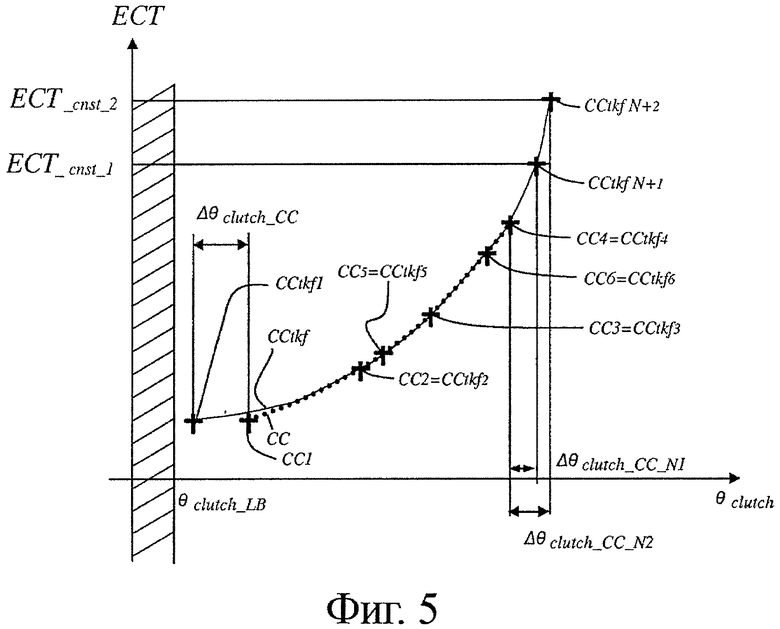
фиг.5 - график с двумя кривыми сцепления, одна из которых определяется данными, записанными во время фазы сбора, а другая определяется данными, полученными в ходе обработки при помощи способа в соответствии с настоящим изобретением.
Автотранспортное средство 7, показанное на фиг.1, содержит устройство 8 обеспечения маневрирования на склоне. Это устройство соединено с остальной частью 6 транспортного средства, с которой оно обменивается данными через коммуникационную шину CAN 4.
Устройство обеспечения в основном содержит:
- вычислительное устройство 1, соединенное с коммуникационной шиной CAN 4, и
- датчик 2 наклона склона, на котором находится транспортное средство, датчик положения педали сцепления и систему 5 стояночного тормоза, соединенные с вычислительным устройством.
Структура и работа устройства обеспечения подробно описаны в документе FR 2828450 - А1, страница 12, строка 23 - страница 33, строка 27, фиг.1-8. В частности, его структура описана на странице 12, строка 23 - страница 16, строка 16 со ссылками на фиг.1 и 2 и на странице 20, строка 4 - страница 22, строка 23 со ссылками на фиг.4.
Система стояночного тормоза описана, в частности, на странице 14, строка 10 - страница 15, строка 11 вышеуказанной публикации со ссылками на фиг.2.
Остальная часть транспортного средства содержит классические органы современного транспортного средства и, в частности, средства для определения и передачи данных транспортного средства, таких как режим двигателя, скорость или положение педали акселератора.
В остальной части описания будут использованы различные физические величины и их обозначения согласно нижеследующему списку:
Как было указано выше, двигатель транспортного средства массой m, находящегося на склоне θtilt, должен развить момент, превышающий пороговое значение CTseuil, чтобы заставить двигаться транспортное средство.
CTseuil=r(b)×ρwheels×m×g×sin(θtilt), где g является нормой поля земного притяжения.
Как было указано выше, согласно стратегии, используемой устройством обеспечения маневрирования, тормозная система отключается после остановки в фазе включения сцепления, как только оценочный момент, передаваемый сцеплением, превышает момент CTseuil. Сложность операции, совершаемой устройством обеспечения, состоит в этой оценке передаваемого момента. Для этого устройство обеспечения использует, в частности, информацию о положении педали сцепления и характеристическую кривую сцепления.
Общая работа устройства обеспечения описана ниже со ссылками на фиг.2.
В первом функциональном блоке 10 получают и формируют сигналы, поступающие от различных датчиков, которыми оборудовано транспортное средство. Эти сигналы передаются, в частности, через коммуникационную шину CAN.
Во втором функциональном блоке 11 определяют характеристическую кривую сцепления. Этот блок содержит:
- субблок 12, в котором определяют выбранное передаточное число коробки передач,
- субблок 14, в котором получают данные, в частности, о положении педали сцепления и о передаваемом сцеплением моменте, и
- субблок 15, в котором используют данные от блока 10 и субблоков 12 и 14 для обновления характеристической кривой сцепления.
В третьем функциональном блоке 16 используют характеристическую кривую сцепления, определенную в блоке 11, и данные блока 10 для определения состояния, которое должен занимать выход 17, управляющий отключением системы стояночного тормоза.
Структура блоков 10 и 11 и их работа идентичны описанным в публикации заявки FR 2828450-A1.
Далее со ссылками на фиг.3 следует описание работы этого третьего функционального блока 16.
В первом блоке 20 в зависимости от режима двигателя и от наклона склона, на котором находится транспортное средство, получают пороговое значение педали акселератора, ниже которого не должна подаваться команда на отключение тормозной системы. Это пороговое значение определяют при помощи картографии, то есть в памяти устройства обеспечения маневрирования записаны данные, позволяющие привести в размерное соответствие пороговое значение положения для значений режима двигателя на оси абсцисс и наклона на оси ординат.
В блоке 21 сравнивают моментальное положение педали акселератора θасс с пороговым значением, установленным на выходе блока 20. Если моментальное значение положения педали акселератора превышает пороговое значение, установленное на выходе блока 20, выход блока 21 активируется или переходит в верхнее состояние.
В блоке 22 используют данные положения педали сцепления, моментальную производную относительно времени этого положения и временной параметр ΔTant для получения на выходе упреждающего положения педали сцепления θclutch_ant. Например, используют формулу: θclutch_ant=θclutch+θ'clutch×ΔTant. Параметр ΔTant может зависеть от одной или нескольких переменных, в частности, от наклона склона.
В блоке 23 обрабатывают данные, полученные в функциональном блоке 11, показанном на фиг.3, и определяющие характеристическую кривую сцепления, для получения на выходе обработанной или измененной характеристической кривой сцепления. Более подробно способ обработки данных будет описан ниже.
В блоке 24 используют измененную характеристическую кривую сцепления и упреждающее положение педали сцепления для получения, путем интерполяции или экстраполяции, оценки значения момента ЕСТ, передаваемого сцеплением.
Это оценочное значение момента сравнивают в блоке 25 с моментом CTseuil, необходимым для трогания с места транспортного средства. Если оценочное значение момента, передаваемого на сцепление, превышает момент CTseuil, необходимый для трогания с места транспортного средства, выход блока является активным или находится в верхнем положении.
Выходы блоков 21 и 25 выходят на логический порт ЕТ, управляющий на выходе отключением тормозной системы, когда он является активным или находится в верхнем состоянии.
Далее со ссылками на фиг.4 следует описание способа обработки данных в соответствии с настоящим изобретением.
Предположим, что блок 11, показанный на фиг.3, выдает матрицу с двумя столбцами и с N строками, в которой содержатся данные, определяющие характеристическую кривую сцепления СС и, в целом, отношение соответствия между значениями моментов и значениями положений педали сцепления. Каждая строка i матрицы соответствует кривой с координатами CCi(θclutch_CC(i), ECTCC(i). Такая кривая СС показана, например, на фиг.5 пунктирной линией.
Согласно первой операции, вычисляют θclutch_CC_tkf(1)=max(θclutch_CC(1)-Δθclutch_CC; θclutch_LB), при этом первое и второе значения Δθclutch_CC и θclutch_LB являются заранее определенными параметрами, сохраненными в памяти вычислительного устройства 1. Например, Δθclutch_CC может составлять 5% хода педали сцепления, и θclutch_LB может составлять 15% хода педали сцепления.
Таким образом, из наименьшего значения положения педали сцепления θclutch_CC(1) вычитают первое значение Δθclutch_CC, если результат не меньше второго значения θclutch_LB. В противном случае наименьшее значение положения педали сцепления θclutch_CC(1) заменяют на второе значение θclutch_LB. В этом случае полученная новая данная служит для определения первой точки измененной характеристической кривой сцепления CCtkf. В этой первой операции другие данные остаются неизменными.
Благодаря такому изменению кривой, в случае, когда транспортное средство стоит на небольшом склоне или на ровной дороге, обеспечивается, чтобы система торможения была отключена или ослаблена с упреждением по сравнению с тем, что произошло бы в таких же условиях с устройством обеспечения маневрирования, описанным в документе FR 2828450-А1. Отсюда следует, что пользователь больше не ощущает напряжения в элементах соединения с землей перед троганием с места транспортного средства.
Во второй операции в вышеупомянутую матрицу добавляют две новые пары данных для ее преобразования в матрицу с двумя столбцами и с N+2 строками. Для этого выбирают верхний предел значений, содержащихся в первом столбце матрицы 2×N:maxi=1 при N(θclutch_CC(i)). Затем в матрицу записывают два новых значения положений педали сцепления θclutch_CC_tkf(N+1) и θclutch_CC_tkf(N+2), причем эти значения определяют соответственно при помощи отношений:
θclutch_CC_tkf(N+1)=maxi=1 при N(θclutch_CC(i))+Δθclutch_CC_tkf(N+1), и
θclutch_CC_tkf(N+2)=maxi=1 при N(θclutch_CC(i))+Δθclutch_CC_tkf(N+2), при этом Δθclutch_CC_tkf(N+1) и Δθclutch_CC_tkf(N+2) являются заранее определенными параметрами, при которых 0<θclutch_CC_tkf(N+1)<Δθclutch_CC_tkf(N+2).
В матрицу записывают также два новых значения моментов ECT_cnst_1 и ECT_cnst_2, соответственно связанные с новыми положениями педали сцепления θclutch_CC_tkf(N+1) и θclutch_CC_tkf(N+2). Значения параметров ECT_cnst_1 и ECT_cnst_2 выбирают таким образом, чтобы:
maxi=1 при N(ECTCC(i))<ECT_cnst_1<ECT_cnst_2.
Параметры Δθclutch_CC_tkf(N+1), Δθclutch_CC_tkf(N+2), ECT_cnst_1 и ΔECT_cnst_2 заранее определяют и записывают в память элемента устройства обеспечения маневрирования, например, в память вычислительного устройства 1. Например, ECT_cnst_1 может составлять 80 Н/м, ECT_cnst_2 может составлять 100 Н/м, Δθclutch_CC_tkf(N+1) может составлять 2% хода педали сцепления, и Δθclutch_CC_tkf(N+2) может составлять 1% хода педали сцепления.
Полученная таким образом новая матрица содержит данные, определяющие характеристическую кривую сцепления CCtkf, выведенную из кривой СС, или в целом отношение соответствия между значениями моментов и значениями положений педали сцепления. Пример такой кривой CCtkf показан на фиг.5 сплошной линией.
Благодаря добавлению таких данных в матрицу, можно контролировать экстраполяцию момента, передаваемого сцеплением, при наличии большого значения положения педали сцепления. Действительно, при помощи этих данных определяют наклон склона, который служит для экстраполяции этих значений. Этот наклон определяют отношением:
(ECT_cnst_2-ECT_cnst_1)/(Δθclutch_CC_tkf(N+2)-Δθclutch_CC_tkf(N+1))
Для осуществления этих различных операций обработки данных устройство обеспечения содержит соответствующие материальные средства и программные средства. В частности, устройство содержит память, содержащую не только различные вышеупомянутые заранее определенные параметры, но также различные значения положений педали сцепления и моментов, образующие матрицы. Эта память может, например, входить в состав вычислительного устройства. Устройство содержит также средства вычисления для выполнения математических операций на сохраненных в памяти значениях и средства для записи и стирания из памяти значений. Эти различные средства могут тоже входить в состав вычислительного устройства. Устройство содержит также программные средства, то есть алгоритмы для управления последовательностями операций, осуществляемых в операциях этого способа обработки данных. Эти алгоритмы могут тоже быть записаны в память вычислительного устройства.
В частности, для определения значения момента, передаваемого сцеплением, на основании значения положения педали сцепления можно использовать формулу линейной интерполяции, если значение положения педали сцепления находится между двумя значениями положений педали сцепления, содержащимися в матрице 2×N+2, определяющей кривую CCtkf. Эта формула использует данные, связанные с двумя значениями положений педали сцепления, наиболее близкими к значению положения педали сцепления, для которого необходимо определить передаваемый момент, и окаймляющими это значение положения педали сцепления, для которого необходимо определить передаваемый момент. Значение передаваемого момента можно зафиксировать на нуле, если значение положения педали сцепления меньше наименьшего значения положения педали сцепления, содержащегося в матрице 2×N+2, определяющей кривую CCtkf. Наконец, можно использовать формулу линейной экстраполяции, если значение положения педали сцепления превышает наибольшее из значений положений педали сцепления, содержащихся в матрице 2×N+2, определяющей кривую CCtkf. Эта формула линейной экстраполяции использует данные, связанные с наибольшим из значений положений педали сцепления, содержащихся в матрице 2×N+2, и упомянутое ранее значение наклона экстраполяции. Таким образом, значение момента можно определить, даже если кривая CCtkf не является монотонной.
Группа изобретений относится к способу обработки данных и устройству обеспечения маневрирования на склоне, использующему этот способ. Способ заключается в том, что определяют отношение соответствия между значениями моментов, передаваемых сцеплением, и значениями положений органа управления сцеплением. Изменяют записанные данные для определения измененного отношения соответствия между значениями моментов, передаваемых сцеплением, и значениями положений органа управления сцеплением. Измененное отношение используют в устройстве обеспечения маневрирования на склоне транспортного средства. Устройство обеспечения маневрирования на склоне автоматически управляет отключением системы торможения. Автотранспортное средство содержит устройство обеспечения маневрирования на склоне. Технический результат заключается в повышении надежности устройства обеспечения маневрирования на склоне. 3 н. и 4 з.п. ф-лы, 5 ил.
1. Способ обработки данных, записанных на этапе сбора данных, причем посредством упомянутых данных определяют отношение (СС) соответствия между значениями моментов, передаваемых сцеплением, и значениями положений органа управления сцеплением, отличающийся тем, что содержит этап изменения записанных данных для определения измененного отношения (CCtkf) соответствия между значениями моментов, передаваемых сцеплением, и значениями положений органа управления сцеплением, при этом указанное измененное отношение соответствия предназначено для использования в устройстве (8) обеспечения маневрирования на склоне транспортного средства (7), оборудованного силовой установкой, соединенной с ведущими колесами через кинематическую цепь, содержащую сцепление и систему (5) торможения, при этом устройство обеспечения автоматически управляет отключением системы торможения.
2. Способ по п.1, отличающийся тем, что на этапе изменения записанных данных выполняют операцию замещения наименьшего значения положения органа управления сцеплением значением замещения, меньшим замещаемого значения.
3. Способ по п.2, отличающийся тем, что значение замещения может превышать или быть равным заранее определенному значению (θclutch-LB).
4. Способ по любому из пп.1-3, отличающийся тем, что на этапе изменения данных выполняют операцию добавления данных.
5. Способ по п.4, отличающийся тем, что операция добавления данных содержит добавление двух пар значений положений органа управления сцеплением (θclutch-CC-tkf(N+1), θclutch-CC-tkf(N+2)) и значений моментов (ECT-cnst-1, ECT-cnst-2) таким образом, чтобы добавляемые значения моментов превышали записанные значения моментов и чтобы добавляемые значения положений органа управления сцеплением превышали значения положений органа управления сцеплением, записанные во время этапа сбора данных.
6. Устройство (8) обеспечения маневрирования на склоне автотранспортного средства, содержащее аппаратные средства (1) и программные средства для осуществления способа обработки по любому из пп.1-5.
7. Автотранспортное средство (7), содержащее устройство (8) обеспечения маневрирования по п.6.
| FR 2858032 A1, 28.01.2005 | |||
| US 2006049691 A1, 09.03.2006 | |||
| DE 102004043541 A1, 23.06.2005 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2001 |
|
RU2268830C2 |

