Настоящее изобретение относится к устройству обеспечения контроля для транспортного средства с механической или автоматической коробкой передач, в котором используют алгоритм построения кривой сцепления.
В частности, изобретение относится к устройствам и способам обеспечения маневрирования на склоне, однако его можно также применять для оценки износа сцепления транспортного средства или для контроля электронной системы управления траекторией (более известной под названием Electronic Traction Control, ETC) транспортного средства 4×4.
На некоторых транспортных средствах конструкторы автомобилей предлагают использовать автоматический стояночный тормоз.
Указанный автоматический стояночный тормоз должен полностью удовлетворять запросам клиента, так как он стоит относительно дорого по сравнению с традиционным стояночным тормозом.
Чтобы соотнести эффективность этой системы с ее стоимостью, конструкторы дополнили ее функцией обеспечения маневрирования на склоне и, в частности, функцией обеспечения начала движения (или трогания с места) на склоне, принцип которой основан на отключении тормозов от не ведущих колес, как только момент, передаваемый двигателем на ведущие колеса, оказывается достаточным, чтобы компенсировать влияние угла наклона склона.
Такие устройства уже известны.
В этой связи в документе GB 2376990 предложен модуль управления устройством автоматического стояночного тормоза для автотранспортного средства, содержащего механическую коробку передач, который отключает усилие, действующее на стояночный тормоз, при получении сигналов, указывающих, с одной стороны, на положительное перемещение педали акселератора и, с другой стороны, на то, что педаль сцепления достигла точки соприкосновения дисков сцепления. Момент времени, в который устройство отпускает тормоз, зависит также от скорости нажатия на педаль сцепления, от включенной передачи и от наклона склона, на котором находится транспортное средство.
Недостатком этого устройства является его чувствительность к шумам датчиков, таких как датчик наклона. Кроме того, на кривой сцепления оно учитывает только точку соприкосновения дисков. Поэтому оно не обеспечивает оптимального трогания с места на крутом склоне.
Еще одним недостатком этого способа является то, что он основан на вычислении момента, передаваемого сцеплением и соответствующего точке соприкосновения дисков, на основании оценки крутящего момента. Таким образом, он не учитывает старения сцепления и является чувствительным к линейным потребителям, таким как кондиционер, генератор переменного тока или любой другой прибор, потребляющий часть энергии, поступающей от двигателя.
В документе FR 2828450 предложен способ обеспечения трогания с места на склоне, использующий характеристики сцепления транспортного средства, при помощи алгоритма, позволяющего произвести оценку момента, передаваемого на это сцепление, чтобы более точно контролировать отключение тормозов во время трогания с места.
Эту оценку производят путем построения кривой сцепления, которая дает положение педали сцепления и соответствующий максимальный момент, передаваемый сцеплением. Однако эта оценка является очень чувствительной к инициализации указанной кривой, а также к шуму датчиков. Кроме того, обновление кривой происходит медленно и не соответствует необходимой степени ее надежности.
Настоящее изобретение устраняет недостатки известных технических решений и относится к устройству обеспечения, в частности, маневрирования на склоне, которое является малочувствительным к старению и к износу сцепления.
Другой задачей изобретения является создание устройства обеспечения, в частности, маневрирования на склоне, которое быстрее учитывает кривую сцепления.
Еще одной задачей изобретения является создание устройства обеспечения, в частности, маневрирования на склоне, которое производит обновление кривой сцепления в зависимости от степени надежности записанной в памяти кривой сцепления.
Объектом настоящего изобретения является устройство обеспечения для транспортного средства, содержащего силовую установку, соединенную с ведущими колесами при помощи сцепления, коммуникационную шину и автоматический стояночный тормоз, при этом устройство содержит датчики, передающие сигналы на шину, и средства оценки построенной на основании указанных сигналов кривой сцепления, при этом указанная кривая связывает положение педали сцепления и диапазон соответствующего максимального момента, передаваемого сцеплением, характеризующееся тем, что дополнительно содержит средства синхронизации по фазе подаваемых сигналов, чтобы уменьшить влияние шума датчиков, связанных с указанными сигналами.
Некоторыми предпочтительными, но не ограничительными отличительными признаками устройства в соответствии с настоящим изобретением являются следующие:
- указанными средствами являются фильтры, которые вводят задержки в сигналы,
- указанными средствами являются фильтры FIR (от Finite Impulse Response -конечная реакция на импульсы),
- устройство дополнительно содержит средства, вводящие в сигналы постоянные задержки,
- устройство дополнительно содержит средства, вводящие в сигналы переменные задержки,
- устройство дополнительно содержит средства для записи, в результате изменений передачи в сторону повышения и/или понижения, производимых на транспортном средстве, точек, связанных с положением педали сцепления, скоростью вращения двигателя, скоростью вращения колес и с моментом, передаваемым сцеплением, чтобы произвести оценку кривой сцепления путем дискретизации, и средства для получения среднего значения указанных точек, записанных во время определенного количества изменений передачи в сторону повышения и/или понижения, причем для каждого диапазона момента,
- устройство дополнительно содержит:
средства для определения, включена ли передача в результате изменения передачи,
средства для управления измерением точек,
средства для анализа каждой точки и определения, удовлетворяет ли она следующим условиям:
- точка принадлежит к диапазону момента,
- скольжение между сцеплением и маховиком превышает заданный порог скольжения,
- отклонение между обновляемой кривой сцепления и точкой должно быть меньше заданного порога,
- средства для определения, в случае необходимости, должна ли соответствующая точка быть отброшена или записана,
- устройство дополнительно содержит средства для обновления кривой сцепления в зависимости от надежности оценки, при этом указанная надежность меньше в начале эксплуатации транспортного средства и повышается по мере использования указанного транспортного средства.
Другие особенности, задачи и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера.
Изобретение поясняется чертежами, на которых представлено следующее:
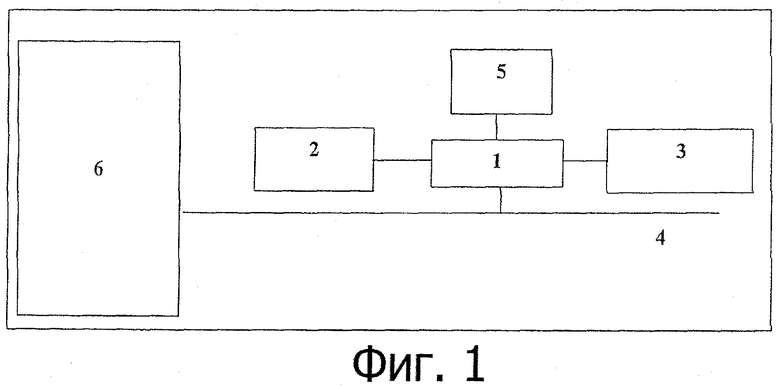
фиг.1 - функциональная схема транспортного средства, оборудованного устройством в соответствии с настоящим изобретением;
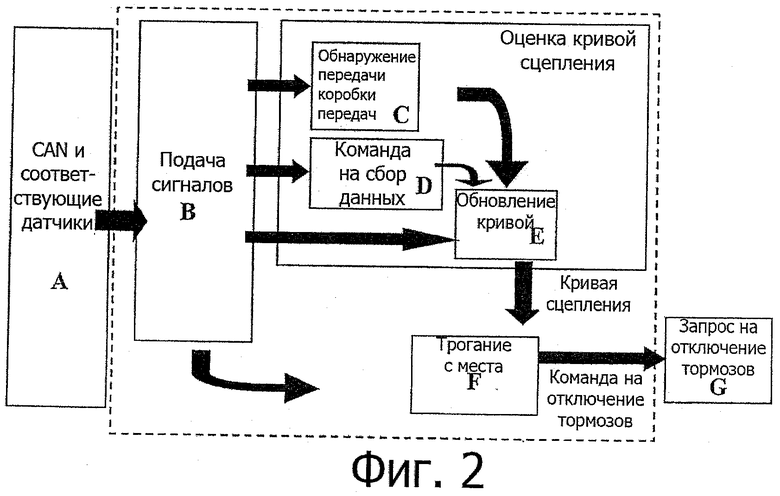
фиг.2 - принцип работы автомата, производящего оценку момента, передаваемого на колеса транспортного средства, используемый в изобретении;
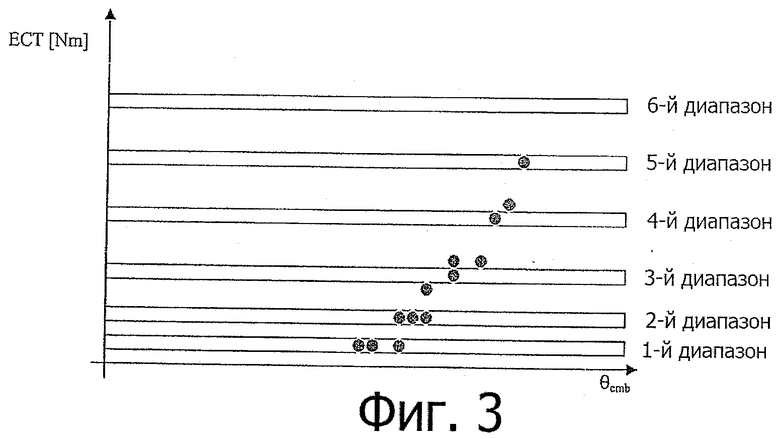
фиг.3 - дискретизация кривой сцепления в соответствии с настоящим изобретением.
Транспортное средство, оборудованное устройством обеспечения трогания с места на склоне в соответствии с настоящим изобретением, содержит силовую установку, автоматический стояночный тормоз 5, шину связи 4, по которой передаются сигналы, поступающие от остальной части транспортного средства 6, и вычислительное устройство управления силовой установкой.
Предпочтительно шина 4 является шиной стандарта CAN™ (Control Area Network, то есть сеть зоны управления).
Силовая установка представляет собой тепловой двигатель, соединенный с ведущими колесами при помощи устройства трансмиссии, содержащего коробку передач и сцепление, которые управляются пользователем или вычислительным устройством в зависимости от типа коробки передач.
Силовая установка может содержать одну или несколько электрических машин с тепловым двигателем или без него.
Устройство обеспечения трогания с места на склоне взаимодействует с вычислительным устройством 1 управления автоматическим стояночным тормозом 5, которое тоже соединено с шиной 4.
Вычислительное устройство 1 оборудовано средством для создания команд на включение и на отключение автоматического стояночного тормоза 5, при этом указанные команды управления тормозом 5 генерируются на линии связи с самим автоматическим стояночным тормозом 5. В случае необходимости, вычислительное устройство 1 оборудуют также средством для передачи на шину 4 данных о состоянии автоматического стояночного тормоза 5.
Вычислительное устройство 1 управления автоматическим стояночным тормозом 5 соединено через соответствующую линию с датчиком наклона 2.
Когда транспортное средство стоит на склоне, датчик наклона 2 выдает сигнал, характеризующий наклон склона, на котором стоит транспортное средство.
Когда вычислительное устройство 1 управления автоматическим стояночным тормозом 5 выдает команду на включение тормоза, подвижные части тормозов сжимают диски, за счет чего автоматический стояночный тормоз 5 оказывается затянутым.
Наоборот, когда вычислительное устройство 1 управления автоматическим стояночным тормозом 5 выдает команду на отключение автоматического стояночного тормоза 5, подвижные части тормозов отводятся.
Кроме того, в ситуации трогания с места (независимо от наклона склона) силовая установка транспортного средства создает момент, который передается или не передается на колеса в зависимости от того, является сцепление активным или нет, и в зависимости от трения, которое зависит от положения сцепления.
Таким образом, устройство в соответствии с настоящим изобретением определяет условие отключения автоматического стояночного тормоза 5, в частности, в зависимости от наклона склона и от оценки момента ЕСТ, передаваемого на сцепление. Это условие определяют таким образом, чтобы транспортное средство оказалось в ситуации трогания с места, как только будет превышен определенный порог, при котором влияние наклона склона будет уравновешено крутящим моментом.
Для трогания с места транспортное средство, стоящее на склоне, должно преодолеть влияние склона, связанное с силой земного притяжения.
Это влияние зависит от наклона склона и от массы транспортного средства и равно

где:
- m - масса транспортного средства,
- g - сила земного притяжения,
- θpente - наклон склона.
Минимальный момент CT_seuil который необходимо передать на сцепление через кинематическую цепь колеса, чтобы позволить транспортному средству тронуться с места (то есть начать движение на склоне), должен быть, по меньшей мере, равен

где:
- r(b) - включенная передача коробки, соответствующая положению b рычага передач,
- ECT(θemb_seuil) - момент, передаваемый сцеплением, когда педаль нажимают до положения θemb_seuil,
- ρroues - радиус колес транспортного средства под нагрузкой.
По сути дела момент CT_seuil является пороговым моментом трогания с места. Предлагаемая изобретением стратегия основана на усовершенствовании алгоритма, описанного в заявке FR 2828450, которая предлагает устройство, позволяющее произвести оценку кривой сцепления (которая, как было указано выше, связывает положение педали сцепления с максимальным моментом, передаваемым сцеплением) таким образом, чтобы устройство было менее чувствительным к износу и старению сцепления, а также к линейным потребителям, чем способы, основанные на ее вычислении. Этот алгоритм показан на прилагаемой фиг.2, и его описание опускается. Соответствующий способ подает команду на отключение автоматического стояночного тормоза, когда момент ЕСТ, передаваемый на сцепление, превышает пороговый момент CT_seuil трогания с места, определяемый уравнением 2.
Трудность состоит в максимально точной оценке момента, передаваемого на сцепление.
Для этого алгоритм и способ, предлагаемый настоящим изобретением, усовершенствуют блоки В и Е, показанные на фиг.2, то есть блоки обработки входных сигналов и обновления кривой сцепления.
На кривой сцепления определяют точку соприкосновения дисков, которая соответствует положению педали, при котором сцепление начинает передавать момент. Этот минимальный момент может, например, составлять примерно 3 Н.м.
Таким образом, точка соприкосновения дисков соответствует положению педали сцепления, при котором сцепление находится в фазе скольжения.
Эта характеристика со временем меняется в зависимости от износа фрикционной накладки диска сцепления и маховика транспортного средства, от изменения жесткости пружин, которые действуют давлением на сцепление, в результате их многократного использования и т.д.
Таким образом, момент, передаваемый сцеплением, определяют на основании заранее известной кривой сцепления. Для этого необходимо определить положение педали сцепления, при котором передается пороговый момент CT_seuil трогания с места, путем решения уравнения 2. После этого выводят положение θemb_seuil, которое должна занимать педаль сцепления, чтобы качественно произвести трогание с места на склоне.
Поскольку кривая сцепления является чувствительной к износу и к старению сцепления, ее необходимо обновлять в течение всего срока службы транспортного средства.
В дальнейшем тексте описания и на прилагаемых чертежах будут использованы следующие обозначения для идентификации математических переменных, используемых в изобретении:
- Cm_CME - действительный средний момент, создаваемый двигателем, оценку которого производит вычислительное устройство управления двигателем,
- ωm - угловая скорость вращения двигателя,
- ωR - угловая скорость вращения передних колес,
- v - продольная скорость транспортного средства,
- θemb - положение педали сцепления,
- θacc - положение педали акселератора,
- θpente - наклон транспортного средства,
- RE - включенная передача. RE=0 при нейтральной передаче, и RE=1 при любой включенной передаче, кроме задней передачи, при которой RE=-1,
- 
Согласно изобретению, оценку кривой сцепления производят на основании точек, полученных во время фаз изменения передачи транспортного средства, предпочтительно во время изменений передачи в сторону понижения. Действительно, во время изменений передачи в сторону понижения вычислительное средство управления двигателем транспортного средства выдает наилучшую оценку крутящего момента Cm_CME, так как оно должно учитывать только влияние, связанное с опусканием поршней, когда они находятся в фазе впуска воздуха, тогда как во время изменений передачи в сторону повышения, вычислительное устройство управления двигателем должно учитывать температуру сгорания смеси, действительное количество впрыскиваемого бензина и т.д., что делает намного более сложной и менее надежной оценку крутящего момента Cm_CME.
Усовершенствование блока обработки сигналов, выдаваемых датчиками транспортного средства
Способ в соответствии с настоящим изобретением основан на следующих уравнениях динамики:

То есть:

где:
r(b)·CR(θpente,ωm-ωR) является моментом, передаваемым сцеплением в положении θemb, который будет обозначаться ECT(θemb),
FX является продольной составляющей усилия контакта между колесом транспортного средства и дорогой,
Fres является продольной составляющей сопротивления движению транспортного средства.
Если скольжение является достаточным, можно использовать уравнение 4 для оценки кривой сцепления. В этом случае получают уравнения:


Второе уравнение является условием по скольжению. Оно означает, что разность между угловой скоростью колес ωR и угловой скоростью сцепления r(b)·ωm должна превышать пороговую угловую скорость Δωseuil, чтобы гарантировать, что момент, передаваемый сцеплением, является максимальным моментом, который может передать сцепление в рассматриваемом положении θemb.
Чтобы произвести оценку кривой сцепления, как это можно установить из уравнения 5, необходимо, чтобы переменные Cm_CME, θemb, ωm, ωR и 
Поэтому применяют фильтрование, и/или дифференцирование, и/или задержки на сигналах, поступающих на вход блока В от разных датчиков транспортного средства через шину CAN, чтобы сигналы на выходе блока В находились в фазе.
Датчиками могут быть, например, датчик наклона склона, датчик сцепления, датчик угловой скорости вращения двигателя и т.д.
Для этого устройство в соответствии с настоящей заявкой использует фильтры FIR (от Finite Impulse Response или конечная реакция на импульсы). При получении входного сигнала от датчика оно вводит в указанный сигнал задержку, которая должна уменьшить шум соответствующего датчика, что само по себе известно. Таким образом, выходным сигналом y(t) фильтра FIR для входного сигнала x(t) является:

где:
- ai является i-ым коэффициентом фильтра FIR,
- N является общим числом коэффициентов фильтра FIR,
- x(t-i·T) является входным сигналом фильтра с задержкой на i·T секунд.
Устройство в соответствии с настоящим изобретением может дополнительно содержать фильтры дифференциации на m выборок, которые вводят задержку и которые тоже известны (типа m/2).
Например, такие фильтры можно реализовать при помощи следующего уравнения:
где Ts является временем дискретизации.
Можно также вводить постоянные задержки, чтобы компенсировать задержки, связанные, например, с операциями фильтрования, дифференцирования (в частности, во время операции, при помощи которой дифференцируют ωm, чтобы получить 

Наконец, можно вводить переменные задержки, причем эти задержки связаны с характеристиками некоторых датчиков.
Например, датчик скорости двигателя выдает информацию о скорости вращения двигателя в оборотах в минуту: в зависимости от скорости вращения двигателя информация выдается более или менее часто, так как ее получают в момент, когда двигатель совершает полный оборот. Таким образом, другие сигналы, такие как оценка крутящего момента Cm_CME, должны быть приведены по фазе в соответствии с моментом выдачи этого сигнала ωm от двигателя. В этом случае выходной сигнал y(t) выражают как имеющий переменную задержку по отношению к входному сигналу x(t), то есть:
где:

x(t-iT) является входным сигналом с задержкой на i·T секунд.
Использование этих фильтров для входных сигналов позволяет, таким образом, повысить устойчивость по отношению к шумам датчиков алгоритма, используемого устройством в соответствии с настоящей заявкой, с учетом задержек, связанных с использованием некоторых параметров во время оценки кривой сцепления.
Усовершенствование обновления кривой сцепления
Чтобы получить кривую сцепления, измеряют, а затем записывают в память точки CC(θemb_CC, ECTCC), связывающие положение педали сцепления θemb и максимальный момент ЕСТ, передаваемый сцеплением. В этом случае кривую сцепления дискретизируют на Nplages диапазонов момента ЕСТ, как показано на прилагаемой фиг.3, при этом каждый диапазон i (1≤i≤Nplages) связывают с точкой CCi(θemb_CC(i), ECTCC(i)).
Предпочтительно диапазоны i (1≤i≤Nplages) являются равномерными интервалами, окаймляемыми моментами, передаваемыми сцеплением, ECTmin(i) и ECTmax(i), при ECTmax(i)=ECTmin(i+1) (для 1≤i≤Nplages-1).
Можно рассмотреть любую другую дискретизацию, см., например, фиг.3. Вместе с тем, более предпочтительной является более точная дискретизация для малых значений ЕСТ, чтобы получить более точную кривую сцепления в области точки соприкосновения дисков.
Предпочтительно, сигналами, учитываемыми для построения кривой сцепления, являются сигналы, получаемые на выходе блока В, то есть фильтрованные сигналы, чтобы они были более устойчивыми к шумам датчиков, и/или сигналы с задержкой, чтобы их синхронизировать по фазе.
Алгоритм и способ в соответствии с настоящим изобретением содержат следующие этапы.
На первом этапе, если обнаружено изменение передачи, создают команду на запоминание точек 

На втором этапе способа определяют, включена ли передача, и, в случае необходимости, является ли изменение передачи переключением в сторону понижения. Если это условие не выполняется, способ не учитывает собранные точки и их отбрасывает. Если нет, переходят к третьему этапу, на котором анализируют собранные точки.
Как было указано выше, условие понижения передачи является ограничением, которое выбирают только для повышения надежности алгоритма, связанного со способом. Если оценку крутящего момента считают достаточно надежной, этим ограничением можно пренебречь, чтобы учитывать также точки, сохраненные в памяти во время изменения передачи в сторону повышения.
Во время анализа собранных точек 
Если обозначить:
• 
• 
• 
то условиями, которым должна удовлетворять такая точка 
- точка должна принадлежать к диапазону i: 
- скольжение должно превышать данный порог 
- отклонение между снятой точкой и точкой обновляемой кривой сцепления в диапазоне i(θemb_CC(i)) должно быть незначительным, например, меньшим порога: 
На четвертом этапе, осуществляемом через каждые nre_emb понижений передачи, выводят среднее значение ni точек диапазона i, собранных и сохраненных в памяти, для каждого диапазона (то есть для i, находящегося между 1 и Nplages), чтобы отфильтровать погрешности, связанные с моделированием и сбором измерений:
где: 
Таким образом, определяют кривую сцепления в результате сбора и усреднения совокупности точек, полученных во время числа nre-emb понижений передачи (даже во время числа nre-emb изменений передачи в сторону повышения и/или понижения).
Три первых этапа выполняют при всех понижениях передачи (и даже при всех изменениях передачи в сторону повышения и/или понижения), тогда как четвертый и пятый этапы осуществляют только через каждые nre_emb понижений передачи (и даже через каждые nre-emb изменений передачи в сторону повышения и/или понижения).
Кроме того, учитываемое число понижений передачи nre-emb, а также погрешность Δθemb между снятой точкой 
Например, в начале срока службы транспортного средства, когда оно еще использовалось мало и когда кривая сцепления является менее надежной, то есть во время первых понижений передачи на транспортном средстве или на первых километрах пробега транспортного средства, значение числа nre-emb понижений передачи, учитываемых при усреднении порогового значения погрешности Δθemb для данного диапазона i, можно зафиксировать на высоком значении, чтобы все собранные точки принимались и чтобы погрешность, связанная с измерениями и моделированием, подвергалась тонкой фильтрации в ходе способа. Эта параметризация позволяет, таким образом, существенно улучшить инициализацию кривой сцепления.
В дальнейшем в ходе эксплуатации транспортного средства можно уменьшить значение, связанное с этими двумя параметрами, поскольку полученная и сохраненная в памяти кривая сцепления в соответствии с настоящим изобретением стремится к совпадению с реальной кривой сцепления.
В ходе пятого этапа способа определяют обновление кривой сцепления, которое предпочтительно осуществляют при помощи фильтра низких частот первого порядка, применяемого для каждого из диапазонов момента (1≤i≤Nplages) через каждые nre-emb понижений передачи:

где:
aemb_courbe является фактором надежности,
k показывает шаг вычисления (то есть через каждые nre-emb понижений передачи).
Таким образом, CCi(k) является точкой кривой сцепления в диапазоне момента i при шаге вычисления k (то есть после k·nre-emb понижений передачи).
CCi(k-1) является точкой кривой сцепления в диапазоне момента i при шаге вычисления (k-1) (то есть после (k-1)·nre-emb понижений передачи).

В зависимости от надежности кривой сцепления коэффициенту надежности aemb_courbe присваивают значение от 0 до 1.
Таким образом, для надежной кривой коэффициент надежности aemb_courbe будет ближе к 1, чем для менее надежной кривой сцепления, при которой коэффициент надежности будет близким к нулю.
Кроме того, этот параметр aemb_courbe можно параметризовать, и так же как и значение числа nre-emb понижений передачи, учитываемого в усреднении, и пороговое значение погрешности Δθemb, можно менять в течение срока службы транспортного средства, чтобы кривая, получаемая при помощи алгоритма в соответствии с настоящим изобретением, быстрее приближалась к реальной кривой сцепления.
Например, во время первых понижений передачи или во время первых километров пробега транспортного средства значение aemb_courbe можно выбрать небольшим (близким к нулю) и затем в дальнейшем постепенно увеличивать. Таким образом, весовой коэффициент последней записанной точки CCi(k-1) будет меньше по сравнению с весовым коэффициентом усредненной точки
Такие образом, обеспечивают обновление и построение кривой сцепления транспортного средства в реальном времени в течение всего срока его службы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ КОНТРОЛЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2492084C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ МАНЕВРИРОВАНИЯ НА СКЛОНЕ | 2008 |
|
RU2470810C2 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ В УСТРОЙСТВЕ ОБЕСПЕЧЕНИЯ МАНЕВРИРОВАНИЯ НА СКЛОНЕ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2483955C2 |
| СПОСОБ И СИСТЕМА ДИАГНОСТИКИ РАБОЧЕГО СОСТОЯНИЯ СИСТЕМЫ ПОМОЩИ ПРИ ТРОГАНИИ С МЕСТА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2527618C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА, ПОСТУПАЮЩЕГО ОТ ДАТЧИКА ПОЛОЖЕНИЯ ОРГАНА УПРАВЛЕНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2480638C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ИДЕНТИФИКАЦИИ | 2009 |
|
RU2531115C2 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ СИЛОВОЙ УСТАНОВКИ | 2008 |
|
RU2455180C2 |
| ПРОТИВООТКАТНАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ С МЕХАНИЧЕСКОЙ КОРОБКОЙ ПЕРЕДАЧ | 2012 |
|
RU2586918C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ НАЧАЛА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ПОДЪЕМЕ | 2018 |
|
RU2744259C1 |
| Механизм управления транспортным средством | 1979 |
|
SU1017529A1 |
Изобретение относится к устройству обеспечения маневрирования на склоне для транспортного средства. Устройство содержит датчики, передающие сигналы на шину, средства оценки построенной на основании сигналов кривой сцепления, средства синхронизации по фазе подаваемых сигналов. Кривая сцепления связывает положение педали сцепления и диапазон соответствующего максимального момента, передаваемого сцеплением. Средства синхронизации обеспечивают уменьшение влияния шума датчиков. Технический результат заключается в обеспечении быстрого учета кривой сцепления. 7 з.п. ф-лы, 3 ил.
1. Устройство обеспечения маневрирования на склоне для транспортного средства, содержащего силовую установку, соединенную с ведущими колесами при помощи сцепления, коммуникационную шину и автоматический стояночный тормоз, при этом устройство содержит датчики, передающие сигналы на шину, и средства оценки построенной на основании указанных сигналов кривой сцепления, при этом указанная кривая связывает положение педали сцепления и диапазон соответствующего максимального момента, передаваемого сцеплением, отличающееся тем, что дополнительно содержит средства синхронизации по фазе подаваемых сигналов, предназначенные для уменьшения влияния шума датчиков, связанных с указанными сигналами.
2. Устройство по п.1, отличающееся тем, что указанными средствами являются фильтры, которые вводят задержки в сигналы.
3. Устройство по п.1 или 2, отличающееся тем, что указанными средствами являются фильтры с конечной импульсной характеристикой (FIR).
4. Устройство по п.1 или 2, отличающееся тем, что дополнительно содержит средства, вводящие в сигналы постоянные задержки.
5. Устройство по п.1 или 2, отличающееся тем, что дополнительно содержит средства, вводящие в сигналы переменные задержки.
6. Устройство по п.1 или 2, отличающееся тем, что дополнительно содержит средства для записи в результате изменений передачи в сторону повышения и/или понижения, производимых на транспортном средстве, точек ( ,
,  ,
,  ,
,  ), связанных с положением педали сцепления (θemb) скоростью вращения двигателя (ωm), скоростью вращения колес (ωR) и с моментом (ЕСТ), передаваемым сцеплением для оценки кривой сцепления посредством дискретизации, и средства для получения среднего значения указанных точек, записанных во время определенного количества изменений передачи в сторону повышения и/или понижения (nemb_courbe), причем для каждого диапазона момента.
), связанных с положением педали сцепления (θemb) скоростью вращения двигателя (ωm), скоростью вращения колес (ωR) и с моментом (ЕСТ), передаваемым сцеплением для оценки кривой сцепления посредством дискретизации, и средства для получения среднего значения указанных точек, записанных во время определенного количества изменений передачи в сторону повышения и/или понижения (nemb_courbe), причем для каждого диапазона момента.
7. Устройство по п.6, отличающееся тем, что дополнительно содержит
средства для определения, включена ли передача в результате изменения передачи,
средства для управления измерением точек (
,
,
,
),
средства для анализа каждой точки и определения, удовлетворяет ли она следующим условиям:
i) точка принадлежит к диапазону момента (ECTmin(i)<
<ECTmax(i)),
ii) скольжение между сцеплением и маховиком превышает заданный порог скольжения (Δωseuil):
iii) отклонение между обновляемой кривой сцепления и точкой должно быть меньше заданного порога (Δθemb):
средства для определения, в случае необходимости, должна ли соответствующая точка быть отброшена или записана.
8. Устройство по п.1 или 2, отличающееся тем, что дополнительно содержит средства для обновления кривой сцепления в зависимости от надежности оценки, при этом указанная надежность ниже в начале эксплуатации транспортного средства и повышается по мере использования указанного транспортного средства.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| WO 2007035376 A2, 29.03.2007 | |||
| DE 10314998 A1, 03.06.2004 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2001 |
|
RU2268830C2 |

