Настоящее изобретение касается способа и системы диагностики рабочего состояния системы помощи при трогании с места автотранспортного средства.
В частности, изобретение касается автотранспортного средства, оборудованного управляемым стояночным тормозом.
В настоящее время некоторые автотранспортные средства оборудуют системой помощи при трогании с места, которая автоматически подает команду на отключение стояночного тормоза во время трогания с места транспортного средства. Стояночный тормоз представляет собой дополнительную систему торможения по отношению к тормозам, приводимым в действие педалью тормоза, и предназначен для удержания транспортного средства на месте во время остановки.
Автоматическое управление отключением стояночного тормоза помогает водителю осуществлять трогание с места на наклонном участке дороги, называемое также «троганием с места на склоне». Принцип трогания с места на склоне состоит в отпуске тормозов на неведущих колесах, как только крутящий момент, передаваемый двигателем на ведущие колеса, оказывается достаточным, чтобы компенсировать влияние склона.
Одной из проблем, встречаемых при использовании системы помощи при трогании с места, является то, что автоматическая подача команды на отключение тормоза в некоторых условиях может быть несвоевременной. Действительно, при нарушении в работе системы помощи при трогании с места система может подать команду на отключение стояночного тормоза, в то время как еще не все условия соблюдены для подачи такой команды. В этом случае говорят о «несвоевременном трогании с места». Под «несвоевременным троганием с места» следует понимать команду на отключение стояночного тормоза, которую подает система и которая застает водителя врасплох, так как она подана в момент, когда еще не все условия для подачи такой команды соблюдены.
Поэтому представляет интерес последующий анализ условий разрешения трогания во время подачи команды на отключение стояночного тормоза с целью диагностики рабочего состояния системы помощи при трогании с места.
Можно, например, сослаться на британскую патентную заявку GB 2 376 990, в которой описана система управления стояночным тормозом, в которой стояночный тормоз отпускают, когда транспортное средство начинает положительное перемещение и когда педаль сцепления достигает соответствующего положения, однако в этом документе не раскрыто средство диагностики рабочего состояния системы помощи при трогании с места.
Можно также указать британскую патентную заявку GB 2 342 967, в которой раскрыто устройство управления стояночным тормозом, в котором указанный тормоз отпускают, когда тормозной момент, действующий на колеса, становится меньше определенного порога. Кроме того, можно указать французскую патентную заявку FR 2 828 450, поданную на имя настоящего заявителя, в которой описано устройство обеспечения трогания с места на склоне, и французскую патентную заявку FR 2 841 199, также поданную на имя настоящего заявителя, в которой раскрыто устройство автоматического отключения стояночного тормоза во время трогания с места. Однако в этих документах тоже не указано средство диагностики рабочего состояния системы помощи при трогании с места.
Таким образом, одной из задач настоящего изобретения является реализация системы и способа диагностики рабочего состояния системы помощи при трогании с места.
Другой задачей изобретения является обеспечение возможности апостериорной диагностики рабочего состояния системы помощи при трогании с места для выявления хорошей или плохой работы такой системы.
В связи с этим объектом настоящего изобретения является способ диагностики рабочего состояния системы помощи при трогании с места автотранспортного средства, оборудованного управляемым стояночным тормозом, содержащий этап вычисления по меньшей мере одного элемента данных о транспортном средстве и этап подтверждения, на котором формируют по меньшей мере один элемент данных подтверждения, связанный с указанным элементом данных о транспортном средстве.
Этот способ содержит этап записи в энергонезависимое запоминающее устройство данных о транспортном средстве и связанных с ними данных подтверждения во время подачи команды на отключение стояночного тормоза и этап диагностики, на котором формируют по меньшей мере один элемент данных диагностики на основании проверки достоверности записанных в память данных.
Благодаря этому способу, получают простой и недорогой метод для легкой и быстрой диагностики рабочего состояния системы помощи при трогании с места. Проверка достоверности данных может представлять собой, например, сравнение элемента данных о транспортном средстве с соответствующим элементом данных подтверждения. Благодаря апостериорной проверке достоверности предварительно записанных в память данных, можно определить, произошло ли несвоевременное трогание с места в результате ошибки подтверждения, а также произошло ли несвоевременное трогание с места в результате ошибки вычисления элемента данных о транспортном средстве.
Согласно другому варианту выполнения, после этапа записи в память осуществляют этап анализа, на котором вычисляют по меньшей мере один новый элемент данных подтверждения на основании по меньшей мере одного записанного в память элемента данных, и осуществляют этап диагностики, на котором формируют по меньшей мере один элемент данных диагностики на основании сравнения нового элемента данных подтверждения по меньшей мере с одним элементом записанных в память данных.
Такой метод позволяет также обнаружить ошибку системы помощи при трогании с места или ошибку вычисления элемента данных о транспортном средстве. Этот метод может дополнить предыдущий метод для повышения надежности диагностики. Кроме того, он позволяет контролировать систему помощи при трогании с места, а также вычислять элемент данных о транспортном средстве посредством апостериорного идентичного вычисления на основании записанных в память данных. Эти записанные в память данные позволяют отслеживать условия работы системы помощи при трогании с места.
Согласно еще одному варианту выполнения, способ содержит этап измерения по меньшей мере одного другого элемента данных о транспортном средстве, и во время этапа анализа вычисляют по меньшей мере один новый элемент данных подтверждения достоверности на основании по меньшей мере одного текущего элемента данных.
Таким образом, если система помощи при трогании с места оборудована датчиком для измерения элемента данных, такой метод позволяет обнаружить возможную неисправность датчика. Этот метод предпочтительно позволяет проверить, возникла ли неисправность во время подачи команды на отключение стояночного тормоза. Кроме того, этот метод позволяет обнаружить, исчезла ли эта необнаруженная неисправность после подачи команды на отключение тормоза.
Согласно другому отличительному признаку, управляют системой помощи при трогании с места для осуществления нового трогания с места с использованием системы помощи для получения по меньшей мере одного дополнительного элемента данных подтверждения и на этапе анализа вычисляют по меньшей мере один новый элемент данных подтверждения на основании дополнительных данных.
После этапа записи в память можно осуществить дополнительное управление системой помощи при трогании с места для формирования новых данных с целью их сравнения с предварительно записанными в память данными.
Согласно еще одному отличительному признаку, этап записи в память осуществляют при помощи устройства, установленного на автотранспортном средстве, и после этого осуществляют этапы анализа и диагностики при помощи устройства, находящегося снаружи указанного транспортного средства.
В этом случае диагностику можно производить, например, во время общего контроля состояния транспортного средства в специальной мастерской. Таким образом, специальную мастерскую можно оборудовать соответствующим устройством для обеспечения апостериорной диагностики рабочего состояния системы помощи при трогании с места в случае жалоб клиента на несвоевременное трогание с места.
Согласно еще одному варианту выполнения, этап анализа осуществляют при разных условиях вычисления.
Таким образом, можно изменять условия трогания с места транспортного средства для выявления ошибки подтверждения, ошибки вычисления или ошибки измерения в системе помощи при трогании с места, которые не были обнаружены во время подачи команды на отпуск тормозов.
Объектом настоящего изобретения является также система диагностики рабочего состояния системы помощи при трогании с места автотранспортного средства, оборудованного управляемым стояночным тормозом, при этом система помощи при трогании с места содержит по меньшей мере одно средство вычисления элемента данных о транспортном средстве, предназначенного для вычислительного устройства помощи при трогании с места, выполненного с возможностью подачи команды на отключение стояночного тормоза и формирования по меньшей мере одного элемента данных подтверждения, связанного с указанным элементом данных о транспортном средстве.
Эта система содержит модуль сохранения для записи данных о транспортном средстве и соответствующих данных подтверждения в энергонезависимое запоминающее устройство во время подачи команды на отключение стояночного тормоза и модуль диагностики, выполненный с возможностью приема записанных в память данных, содержащий модуль проверки, выполненный с возможностью формирования по меньшей мере одного элемента данных диагностики на основании проверки достоверности записанных в память данных.
Согласно другому варианту выполнения, указанный модуль диагностики содержит модуль анализа для вычисления по меньшей мере одного нового элемента данных подтверждения на основании по меньшей мере одного записанного в память элемента данных, предназначенного для модуля проверки, также выполненного с возможностью формирования по меньшей мере одного элемента данных диагностики на основании сравнения нового элемента данных подтверждения по меньшей мере с одним записанным в память элементом данных.
Согласно еще одному варианту выполнения, система помощи при трогании с места содержит по меньшей мере, один датчик для измерения по меньшей мере одного другого элемента данных о транспортном средстве, предназначенный для вычислительного устройства системы помощи при трогании с места, при этом модуль диагностики выполнен с возможностью приема текущих данных о транспортном средстве и связанных с ними текущих данных подтверждения, а модуль анализа выполнен с возможностью вычисления по меньшей мере одного нового элемента данных подтверждения на основании по меньшей мере одного элемента текущих данных.
Согласно еще одному отличительному признаку, вычислительное устройство системы помощи при трогании с места выполнено с возможностью формирования по меньшей мере одного дополнительного элемента данных подтверждения во время подачи дополнительной команды на отключение стояночного тормоза, а модуль анализа выполнен с возможностью формирования нового элемента данных подтверждения на основании дополнительных данных подтверждения.
Согласно еще одному отличительному признаку, модуль сохранения установлен на автотранспортном средстве, а модуль диагностики находится снаружи указанного транспортного средства.
Согласно еще одному варианту выполнения, модуль анализа выполнен с возможностью вычисления новых данных подтверждения при других условиях вычисления.
Другие задачи, отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве неограничительного примера, со ссылками на прилагаемые чертежи, на которых:
фиг.1 - схематичный вид системы диагностики в соответствии с настоящим изобретением;
фиг.2 - схематичный вид варианта выполнения модуля диагностики;
фиг.3 - блок-схема основных этапов способа диагностики в соответствии с настоящим изобретением;
фиг.4-8 - блок-схемы примеров осуществления этапа диагностики. На фиг.1 схематично показана система 1 диагностики рабочего состояния системы 2 помощи при трогании с места автотранспортного средства.
Система 2 помощи при трогании с места (или SDA) содержит вычислительное устройство 3 системы помощи при трогании с места, множество датчиков 4-8, электрически управляемый стояночный тормоз 9, средства 10 и 11 вычисления и модуль 12 ввода/вывода системы SDA. Система 2 помощи при трогании с места установлена на автотранспортном средстве.
Вычислительное устройство 3 системы помощи при трогании с места содержит алгоритм для управления подачей команды на отключение или включение стояночного тормоза 9. Вычислительное устройство 3 выдает команду отключения/включения, передаваемую через линию 13 связи, на стояночный тормоз 9.
Вычислительное устройство 3 системы помощи при трогании с места принимает данные о транспортном средстве, поступающие от датчиков 4-8. Датчик 4 уклона передает значение PenteDA уклона через линию 14 связи на вычислительное устройство 3 системы помощи при трогании с места. Датчик 5 положения педали акселератора передает значение PosPedAcc положения педали акселератора через линию 15 связи на вычислительное устройство 3 системы помощи при трогании с места. Датчик 6 режима двигателя передает значения Nmot режима двигателя через линию 16 связи на вычислительное устройство 3 системы помощи при трогании с места. Датчик 7 положения рычага коробки передач передает значение PosBV положения рычага коробки передач через линию 17 связи на вычислительное устройство 3 системы помощи при трогании с места. Датчик 8 положения педали сцепления передает значение PosPedEmb положения педали сцепления через линию 18 связи на вычислительное устройство 3 системы помощи при трогании с места.
Вычислительное устройство 3 системы помощи при трогании с места принимает также данные о транспортном средстве, поступающие от средств 10 и 11 вычисления и передаваемые соответственно через линии 19 и 20 связи.
Средства 10 и 11 вычисления могут формировать или оценивать данные о транспортном средстве, в частности, при помощи алгоритмов вычисления. Эти средства 10 и 11 вычисления предпочтительно интегрированы в систему помощи при трогании с места, но они могут также принадлежать к другим бортовым системам транспортного средства, например, таким как система предупреждения пробуксовки колес транспортного средства.
Согласно предпочтительному варианту, система помощи при трогании с места содержит два модуля А1 и А2 оценки момента Croues, передаваемого на колеса транспортного средства.
Первый модуль А1 оценки производит оценку момента Croues, передаваемого на колеса, при помощи способа, описанного в вышеупомянутой патентной заявке FR 2 841 199. Система помощи при трогании с места может также содержать второй модуль А2 оценки момента Croues, передаваемого на колеса, при помощи способа, описанного в вышеупомянутой патентной заявке FR 2 828 450. Этот второй модуль А2 может дополнять или подменять первый модуль А1 оценки. Параллельное использование двух модулей позволяет получить две оценки передаваемого на колеса момента при помощи разных способов, что обеспечивает избыточность оценки передаваемого на колеса момента для повышения надежности системы помощи при трогании с места.
Первый модуль А1 оценки, основанный на способе согласно патентной заявке FR 2 841 199, производит оценку передаваемого на колеса момента Croues на основании временной производной режима двигателя, момента двигателя и инерции двигателя.
Второй модуль А2 оценки, основанный на способе согласно патентной заявке FR 2 828 450, производит оценку передаваемого на колеса момента Croues на основании измеряемого датчиком положения педали сцепления и на основании кривой сцепления.
Можно также предусмотреть другие средства для формирования данных о передаваемом на колеса моменте Croues, например, использующие датчик момента на колесах или любой другой алгоритм вычисления указанного момента Croues.
Кроме того, вычислительное устройство 3 системы помощи при трогании с места выполнено с возможностью формирования, по меньшей мере, одного элемента данных подтверждения, связанного с каждым из элементов данных о транспортном средстве, принятых от датчика или средства вычисления. Вычислительное устройство 3 помощи при трогании с места использует эти данные подтверждения для проверки условий трогания с места до подачи команды на отключение или включение стояночного тормоза 9. Если проверка данных подтверждения прошла нормально, подают команду на отключение стояночного тормоза 9.
Модуль 12 ввода/вывода системы SDA соединен с вычислительным устройством 3 системы помощи при трогании с места через линию 21 связи для приема данных о транспортном средстве, измеренных датчиками 4-8 и сформированных модулями А1 и А2 оценки, а также данных подтверждения, сформированных вычислительным устройством 3 системы помощи при трогании с места. Модуль 12 ввода/вывода системы SDA передает указанные данные о транспортном средстве и данные подтверждения в систему 1 диагностики. Модуль 12 ввода/вывода системы SDA принимает также команду отключения/включения стояночного тормоза 9 через линию 21 связи и может передать ее в систему 1 диагностики.
Система 1 диагностики содержит модуль 22 сохранения и модуль 23 диагностики. В предпочтительном варианте, обозначенном А на чертеже, модуль 22 сохранения установлен на транспортном средстве и может находиться в системе 2 системы помощи при трогании с места, а модуль 23 диагностики расположен снаружи транспортного средства. Например, модуль 23 диагностики может быть установлен в вычислительном устройстве внутри переносного компьютера.
В варианте, обозначенном В, модуль 22 сохранения и модуль 23 диагностики установлены на транспортном средстве. Кроме того, модуль диагностики 23 может быть установлен внутри системы 2 помощи при трогании с места.
Модуль 22 сохранения соединен с модулем 12 ввода/вывода системы SDA через линию 24 связи.
Через линию 24 связи модуль 22 сохранения принимает команду отключения/ включения стояночного тормоза 9, данные о транспортном средстве от датчиков 4-8 и от модулей А1 и А2 оценки, а также данные подтверждения, формируемые вычислительным устройством 3 системы помощи при трогании с места. Модуль 22 сохранения может также передавать через линию 24 связи все записанные в памяти данные в модуль 12 ввода/вывода системы SDA.
Точно так же модуль 23 диагностики соединен с модулем 12 ввода/вывода системы SDA для приема через линию 25 связи команды отключения/включения стояночного тормоза 9, данных о транспортном средстве, а также данных подтверждения. Данные и команда отключения/включения, принимаемые модулем 23 диагностики, могут поступать либо от вычислительного устройства 3 системы помощи при трогании с места, и в этом случае они являются текущими данными, либо от модуля 22 сохранения, и в этом случае они являются записанными в память данными.
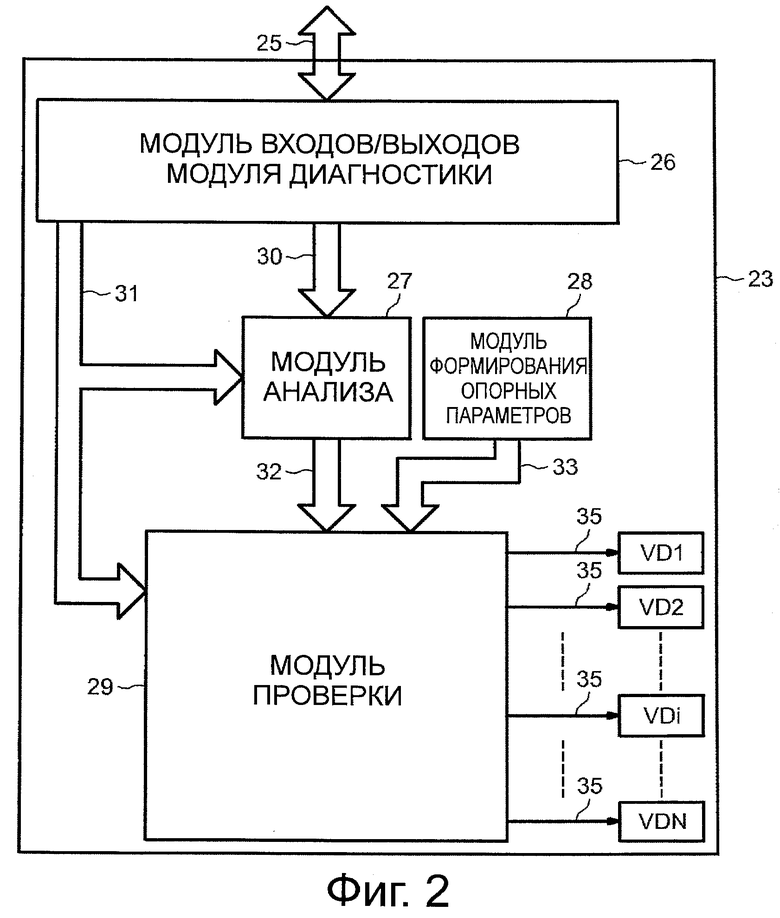
На фиг.2 схематично показан вариант выполнения модуля 23 диагностики. Модуль 23 диагностики содержит модуль 26 ввода/вывода модуля диагностики, модуль 27 анализа, модуль 28 формирования контрольных параметров и модуль 29 проверки.
Модуль 26 ввода/вывода модуля диагностики соединен с модулем 12 ввода/вывода системы SDA через линию 25 связи для приема текущих данных от вычислительного устройства 3 системы помощи при трогании с места, а также записанных в память данных от модуля 22 сохранения. Модуль 26 ввода/вывода модуля диагностики может также передавать через линию 25 связи команду трогания с места на вычислительное устройство 3 системы помощи при трогании с места, чтобы последнее могло сформировать дополнительную команду отключения/включения стояночного тормоза 9. Эта команда трогания с места, поступающая от модуля 23 диагностики, позволяет произвести дополнительное трогание с места с использованием системы помощи в условиях трогания, отличных от условий, которые привели к формированию записанных в память данных. Дополнительное трогание с места с использованием системы помощи позволяет формировать дополнительные текущие данные, которые можно затем сравнить с записанными в память данными с целью осуществления апостериорной диагностики.
Модуль 27 анализа соединен с модулем 26 ввода/вывода модуля диагностики для приема текущих данных, поступающих от вычислительного устройства 3 системы помощи при трогании с места и передаваемых через линию 30 связи, и записанных в память данных, поступающих от модуля 22 сохранения и передаваемых через линию 31 связи. Этот модуль 27 анализа передает через линию 32 связи вычисленные данные на модуль 29 проверки. Модуль 27 анализа выполнен также с возможностью передачи текущих данных, поступающих от вычислительного устройства 3 системы помощи при трогании с места, напрямую в модуль 29 проверки. Под прямой передачей данных следует понимать данные, которые не подвергаются повторному вычислению в модуле 27 анализа.
Модуль 28 выполнен с возможностью формирования контрольных параметров для их передачи через линию 33 связи в модуль 29 проверки.
Модуль 29 проверки принимает также через линию 31 связи записанные в память данные от модуля 26 ввода/вывода модуля диагностики. Модуль 29 проверки формирует множество элементов данных диагностики, обозначенных VD1, VD2…, VDi…, VDN, и передает их через линии 35 связи в модуль 26 ввода/вывода модуля диагностики.
Данные диагностики можно передавать на экран переносного компьютера или в компьютерный файл типа текстового файла. Когда модуль диагностики установлен на транспортном средстве, можно предусмотреть генерирование визуального, звукового или тактильного тревожного сигнала для оповещения водителя.
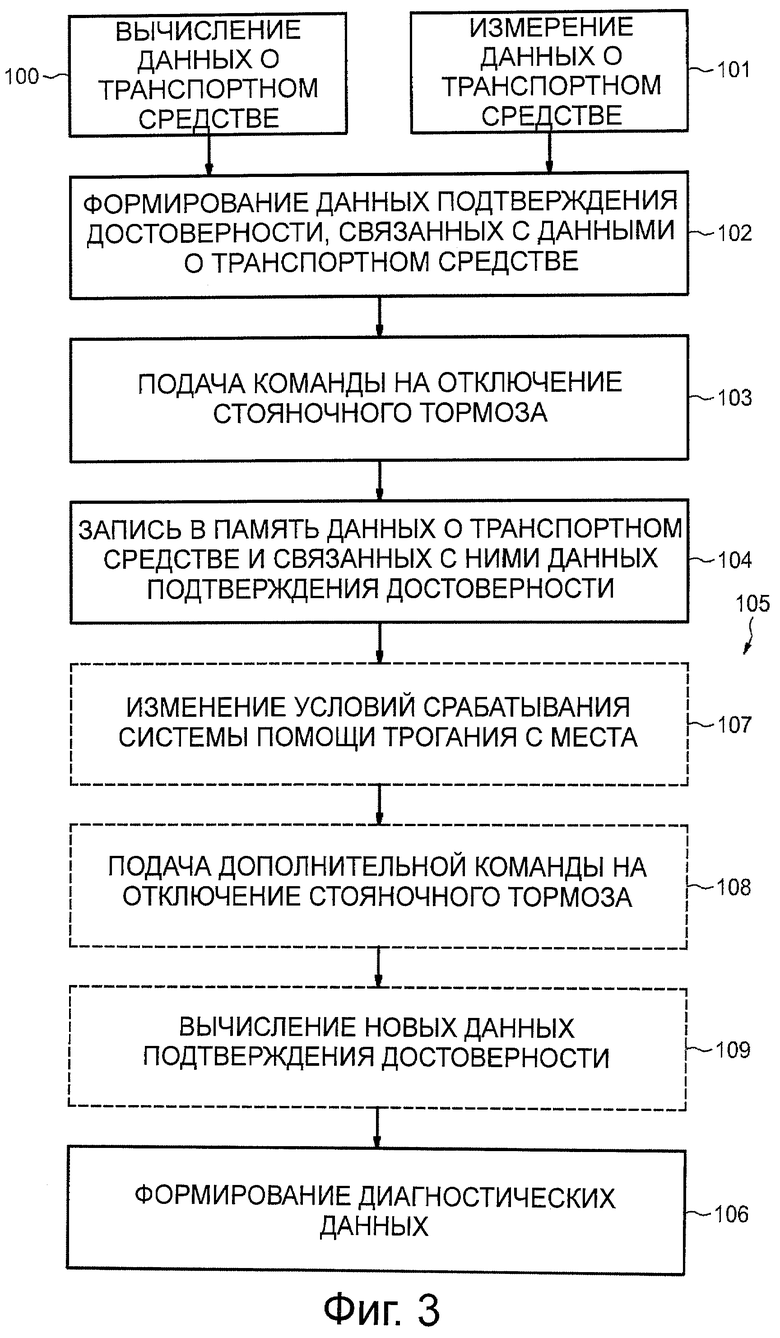
На фиг.3 показана блок-схема основных этапов способа диагностики рабочего состояния описанной выше системы 2 помощи при трогании с места.
Способ начинается этапами 100 и 101, на которых производят соответственно вычисление элемента данных о транспортном средстве при помощи средства вычисления и измерение элемента данных о транспортном средстве при помощи датчика. Затем осуществляют следующий этап 102, на котором формируют элемент данных подтверждения, связанный с каждым элементом данных о транспортном средстве. Если все условия трогания с места соблюдены, осуществляют этап 103, на котором передают команду на отключение стояночного тормоза. После этого осуществляют этап 104 для записи в память данных о транспортном средстве и связанных с ними данных, используемых для диагностики работы системы 2 помощи при трогании с места. После этого осуществляют этап 105 проверки достоверности записанных в память данных и осуществляют этап 106 диагностики, на котором формируют элемент данных диагностики для каждого этапа 105 проверки.
Этап 105 проверки может содержать несколько факультативных этапов 107-109 в зависимости от записанных в память данных. Во время этапа 105 проверки можно, например, сравнить между собой записанные в память данные, затем осуществить этап 106 диагностики. Можно также осуществить этап 109 для вычисления нового элемента данных подтверждения на основании предыдущих записанных в память данных. Можно также осуществить этап 107, на котором изменяют условия трогания с места, например, поместив транспортное средство на склон с другим углом наклона или переместив рычаг коробки передач в «нейтральное» положение. После этого этапа 107 изменения осуществляют этап 108, на котором подают дополнительную команду на отключение стояночного тормоза. Этап 108 позволяет формировать новые данные для новых условий, затем эти новые данные сравнивают с ранее записанными в память данными.
Общий принцип способа диагностики состоит в проверке при помощи вычислительного устройства 3 системы помощи при трогании с места достоверности полученных данных о транспортном средстве перед тем, как подать команду отключения/включения на стояночный тормоз 9. При подаче команды отключения/включения модуль 22 сохранения записывает данные о транспортном средстве и соответствующие данные подтверждения в энергонезависимое запоминающее устройство типа EEPROM, или «Электрически стираемое и программируемое постоянное запоминающее устройство». Затем, если происходит несвоевременное трогание с места, анализируют записанные в память данные, чтобы произвести диагностику рабочего состояния системы 2 помощи при трогании с места.
Различают несколько типов несвоевременного трогания с места в зависимости от неисправности одного из источников формирования данных о транспортном средстве. Основными источниками формирования данных о транспортном средстве являются датчики измерения, модули оценки передаваемого на колеса момента и вычислительное устройство системы помощи при трогании с места.
В зависимости от неисправного источника различают три типа несвоевременного трогания с места:
- Тип I: несвоевременное трогание с места в результате необнаруженной неисправности датчика, например, когда транспортное средство стоит на месте, рычаг передач находится в «нейтральном» положении и стояночный тормоз затянут.В этих условиях, если контактор коробки передач заблокирован в положении «включенной передачи» непосредственно перед троганием с места, простое нажатие на педаль акселератора может привести к подаче команды на отключение стояночного тормоза. Обычно эту неисправность обнаруживают уже впоследствии в условиях движения транспортного средства, когда контакторы нейтральной передачи и включенной передачи выдают противоречивую информацию.
- Тип II: несвоевременное трогание с места в результате переоценки передаваемого на колеса момента. Команда отключения выдается слишком рано, если передаваемый на колеса реальный момент меньше момента, требуемого при данном угле уклона, что приводит к неожиданному движению назад транспортного средства.
- Тип III: несвоевременное трогание с места в результате сбоя в работе вычислительного устройства системы помощи при трогании с места. При этом вычислительное устройство подтверждает правильно не все условия осуществления трогания с места с использованием системы помощи.
Ниже приведен неограничительный список данных, записываемых в память при помощи модуля 22 сохранения. Модуль 22 сохранения выполнен также с возможностью записи данных о транспортном средстве в зависимости от используемого модуля оценки. Действительно, данные о транспортном средстве отличаются в зависимости от используемого модуля оценки.
В качестве примера ниже приведен список данных о транспортном средстве, измеряемых датчиками 4-7. Эти измеренные данные записывают в память независимо от используемого модуля оценки:
- PenteDa: склон или наклон дороги, по которой движется транспортное средство, относительно горизонтали
- PosPedAcc: положение педали акселератора
- PosBV: положение рычага коробки передач
- Nmot: режим двигателя.
В качестве примера ниже приведен список данных подтверждения, сформированных вычислительным устройством 3 системы помощи при трогании с места. Эти вычисленные данные записывают в память независимо от используемого модуля оценки:
- DistanceTotale: расстояние, пройденное транспортным средством
- ValPenteDa: логический сигнал подтверждения значения PenteDA, который соответствует:
- 0, если значение PenteDa не подтверждено
- 1, если значение PenteDa подтверждено
- ValPosPedAcc: логический сигнал подтверждения значения PosPedAcc, который соответствует:
- 0, если значение PosPedAcc не подтверждено
- 1, если значение PosPedAcc подтверждено
- SeuilPosPedAcc: пороговое значение положения педали акселератора, сформированное вычислительным устройством 3 системы помощи при трогании с места
- ValPosBV: логический сигнал подтверждения значения PosBV, который
соответствует:
- 0, если значение PosBVне подтверждено
- 1, если значение PosBV подтверждено
- ValNmot: логический сигнал подтверждения значения Nmot, который
соответствует:
- 0, если значение Nmot не подтверждено
- 1, если значение Nmot подтверждено
- SeuilNmot: пороговое значение режима двигателя, сформированное вычислительным устройством 3 системы помощи при трогании с места в зависимости от склона.
Если используют первый модуль А1 оценки, передаваемый на колеса момент оценивают на основании кривой сцепления, которая связывает положение педали сцепления и максимальный момент, передаваемый сцеплением при этом положении. Для апостериорного вычисления момента, передаваемого на колеса, необходимо, таким образом, записать в память кривую сцепления во время трогания с места с использованием системы помощи.
Ниже в качестве примере приведен список данных, которые записывают в память, только если используют первый модуль А1 оценки:
Элемент данных, измеряемый датчиком 8:
- PosPedEmb: положение педали сцепления.
Данные, формируемые вычислительным устройством системы помощи при трогании с места:
- ValPosPedEmb: логический сигнал подтверждения значения PosPedEmb, который соответствует:
- 0, если значение PosPedEmb не подтверждено
- 1, если значение PosPedEmb подтверждено
- SeuilPosPedEmb: пороговое значение положения педали сцепления, сформированное вычислительным устройством 3 системы помощи при трогании с места
- PosPedEmbAnt: прогнозируемое положение педали сцепления, сформированное вычислительным устройством 3 системы помощи при трогании с места
- SeuilCroues: пороговое значение момента, передаваемого на колеса, сформированное вычислительным устройством 3 системы помощи при трогании с места в зависимости от склона.
Данные, формируемые первым модулем А1 оценки:
- Croues: оценка момента, передаваемого на колеса
- СоurbеEmb: кривая сцепления, выработанная первым модулем А1 оценки.
Если используют второй модуль А2 оценки, передаваемый на колеса момент оценивают на основании временной производной режима двигателя и на основании момента двигателя. Для апостериорного вычисления момента, передаваемого на колеса, необходимо, таким образом, записать в память хронологию режима двигателя во время трогания с места с использованием системы помощи.
Ниже в качестве примера приведен список данных, которые записывают в память, только если используют второй модуль А2 оценки:
Данные, измеряемые датчиком 6:
- Nmot(1…n): хронология по n отсчетов режима двигателя во время трогания с места с использованием системы помощи. Запись в память n отсчетов позволяет производить вычисление временной производной режима двигателя. Значение Nmot(1) соответствует значению режима двигателя, измеренному во время подачи команды на отключение стояночного тормоза 9:
- СМЕ: момент двигателя.
Данные, формируемые вычислительным устройством системы помощи при трогании с места:
- SeuilCroues: пороговое значение передаваемого на колеса момента, сформированное вычислительным устройством 3 системы помощи при трогании с места в зависимости от склона.
Данные, формируемые вторым модулем А2 оценки:
- Croues: оценочное значение момента, передаваемого на колеса. На фиг.4-8 показаны блок-схемы, иллюстрирующие примеры осуществления этапа диагностики.
Этап диагностики состоит в осуществлении проверки записанного в память элемента данных и в формировании связанного с ним элемента данных диагностики VDi. Связанный элемент данных VDi можно кодировать следующим образом:
- VDi: значение диагностики, связанное с проверкой и составляющее:
- 0, если рабочее состояние системы помощи при трогании с места подтверждено,
- 1, если в результате неисправности датчика произошло несвоевременное трогание с места типа I
- 2, если в результате переоценки момента, передаваемого на колеса, модулем оценки, произошло несвоевременное трогание с места типа II
- 3, если в результате сбоя в работе вычислительного устройства системы помощи при трогании с места произошло несвоевременное трогание с места типа III.
Проверки осуществляет модуль 27 проверки. Вычислительное устройство 3 системы помощи при трогании с места может принимать множество элементов данных, модуль 27 проверки данных может производить множество проверок разного типа.
На фиг.4-8 представлены пять типов проверок.
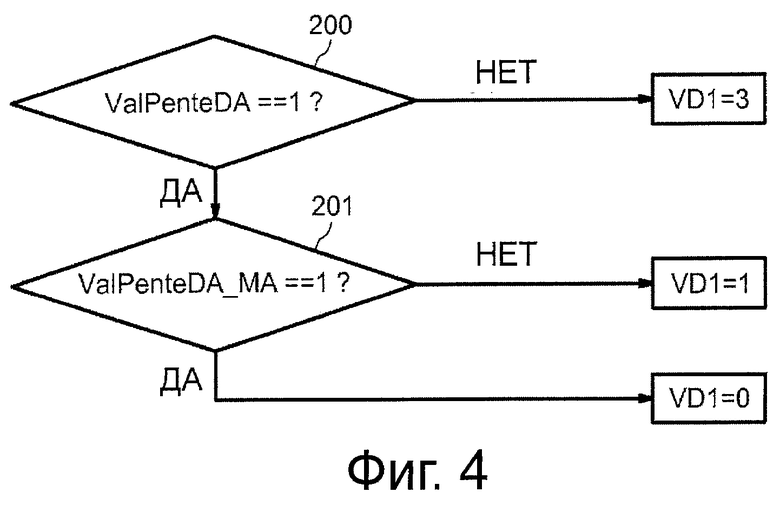
На фиг.4 показан первый тип проверки, при которой сравнивают записанный в память элемент данных подтверждения с соответствующим текущим элементом данных подтверждения достоверности, которая поступает напрямую от модуля 25 анализа.
Этот первый тип проверки можно использовать для проверки разных данных о транспортном средстве, измеряемых датчиком. Далее со ссылками на фиг.4 следует описание примера применения этого типа проверки для значения PenteDa.
Как показано на фиг.4, проверяют значение PenteDa и формируют значение VD1 диагностики в зависимости от результата проверки. Если была подана команда на отключение стояночного тормоза, записанное в память значение подтверждения ValPenteDa можно считать надежным. Для обнаружения неисправности датчика 4 склона после этого записанное в память значение ValPenteDa сравнивают с текущим значением ValPenteDa_МА, поступающим от модуля 27 анализа.
На этапе 200 проверяют значение ValPenteDa. Если значение ValPenteDa не подтверждено, значение VD1 равно 3, в противном случае осуществляют следующий этап 201. На этапе 201 проверяют, подтверждено ли значение ValPenteDa_MA. Если значение ValPenteDa_MA не подтверждено, то значение VD1 равно 1, в противном случае значение VD1 равно 0.
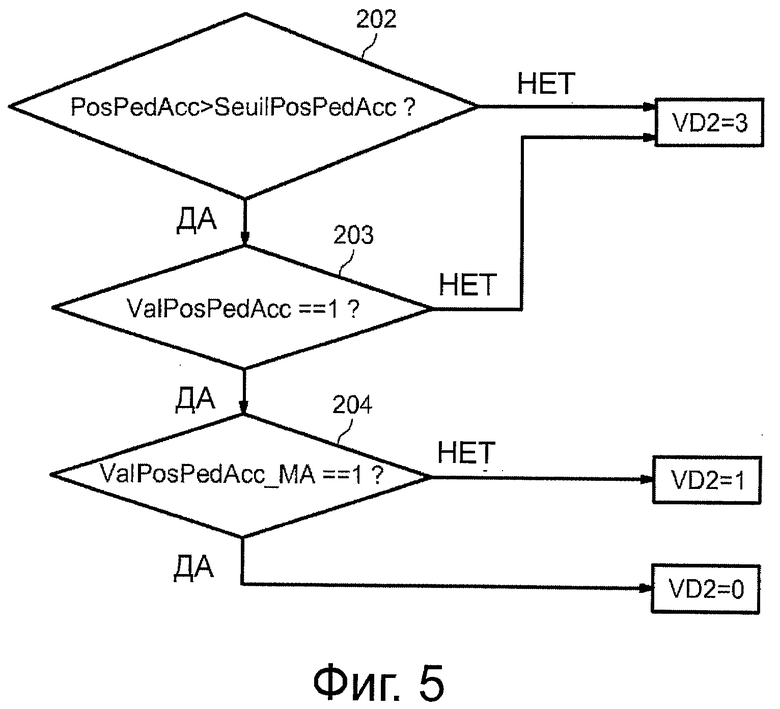
На фиг.5 показан второй тип проверки, при которой на первом этапе сравнивают записанное в память измеренное значение с первым записанным в память значением подтверждения, затем сравнивают второе записанное в память значение подтверждения с соответствующим текущим значением подтверждения, поступившим от модуля 27 анализа.
Этот второй тип проверки можно использовать для проверки, с одной стороны, различных данных о транспортном средстве, измеряемых датчиком, а, с другой стороны, связанных с ними данных подтверждения. Далее со ссылками на фиг.5 следует описание примера применения этого типа проверки для значения PosPedAcc.
Как показано на фиг.5, проверяют значение PosPedAcc и формируют значение VD2 диагностики в зависимости от результата проверки. Если была подана команда на отключение стояночного тормоза, положение педали акселератора PosPedAcc должно быть больше, чем пороговое значение SeuilPosPedAcc, и записанное в память значение ValPosPedAcc подтверждения следует считать надежным. Для обнаружения неисправности датчика 5 положения педали акселератора сравнивают записанное в память значение ValPosPedAcc с текущим значением ValPosPedAcc_MA, поступившим от модуля 27 анализа.
На этапе 202 сравнивают значение PosPedAcc с пороговым значением SeuilPosPedAcc. Если значение PosPedAcc меньше или равно пороговому значению SeuilPosPedAcc, значение VD2 равно 3, если нет - осуществляют следующий этап 203.
На этапе 203 проверяют, подтверждено ли значение ValPosPedAcc. Если значение ValPosPedAcc не подтверждено, то значение VD2 равно 3, если нет - осуществляют следующий этап 204. На этапе 204 проверяют, подтверждено ли значение ValPosPedAcc_МА. Если значение ValPosPedAcc_MA не подтверждено, то значение VD2 равно 1, а противном случае данная VD2 равна 0.
Неисправность другого датчика 4-8 можно обнаружить аналогично этому второму типу проверки. Система 2 помощи при трогании с места использует отдельный набор данных для каждого датчика. Эти данные имеют разное название, но выполняют роль, аналогичную данным, описанным в связи со вторым типом проверки. Этот второй тип проверки, представленный на фиг.5, можно применять для других датчиков, адаптируя соответствующим образом используемые данные.
Если используют датчик 7 положения рычага коробки передач, аналогично второму типу проверки можно осуществлять проверку значения PosBV и сформировать значение VD3 диагностики в зависимости от результата проверки. Если была подана команда на отключение стояночного тормоза, то передача должна быть включена, то есть значение PosBV должна отличаться от нейтрального положения Pont_Mort. Это условие можно ужесточить, разрешив трогание с места только на первой передаче или на задней скорости. Кроме того, записанное в память значение ValPosBV следует считать надежным. Для обнаружения неисправности датчика 7 положения рычага коробки передач сравнивают записанное в память значение ValPosBV с текущим значением ValPosBV_MA, поступившим от модуля 27 анализа.
Значение PosBV сравнивают с пороговым значением Pont_Mort. Если значение PosB V отличается от порогового значения Pont_Mort, то значение VD3 равно 3, если нет - осуществляют следующий этап.
На следующем этапе проверяют, подтверждено ли значение ValPosBV. Если значение ValPosBV не подтверждено, то значение VD3 равно 3, в противном случае осуществляют другой следующий этап. Во время другого следующего этапа проверяют, подтверждено ли значение ValPosBV_MA. Если значение ValPosBV _МА не подтверждено, то значение VD3 равно 1, в противном случае значение VD3 равно 0.
Если используют датчик 6 режима двигателя, аналогично второму типу проверки можно осуществлять проверку значения Nmot и сформировать значение VD4 диагностики в зависимости от результата проверки. Если была подана команда на отключение стояночного тормоза, режим двигателя Nmot должен быть больше порогового значения SeuilNmot, и записанное в память значение ValNmot следует считать надежным. Для обнаружения неисправности датчика 6 режима двигателя сравнивают записанное в память значение ValNmot с текущим значением ValNmot_MA, поступившим от модуля 27 анализа.
Значение Nmot сравнивают с пороговым значением SeuilNmot. Если значение Nmot меньше или равна пороговому значению SeuilNmot, то значение VD4 равно 3, в противном случае осуществляют следующий этап.
Во время следующего этапа проверяют, подтверждено ли значение ValNmot. Если значение ValNmot не подтверждено, то значение VD4 равно 3, в противном случае осуществляют другой следующий этап. Во время другого следующего этапа проверяют, подтверждено ли значение ValNmot _МА. Если значение ValNmot _МА не подтверждено, то значение VD4 равно 1, в противном случае значение VD4 равно 0.
Если используют датчик 8 положения педали сцепления, аналогично второму типу проверки можно осуществлять проверку значения PosPedEmb и сформировать значение VD5 диагностики в зависимости от результата проверки. Если была подана команда на отключение стояночного тормоза, положение педали сцепления PosPedEmb должно быть больше порогового значения SeuilPosPedEmb, и записанное в память значение подтверждения ValPosPedEmb следует считать надежным. Для обнаружения неисправности датчика 8 положения педали сцепления сравнивают затем записанное в память значение ValPosPedEmb с текущим значением ValPosPedEmb _МА, поступившим от модуля 27 анализа,
Значение PosPedEmb сравнивают с пороговым значением SeuilPosPedEmb. Если значение PosPedEmb меньше или равно пороговому значению SeuilPosPedEmb, то значение VD5 равно 3, если нет - осуществляют следующий этап.
Во время следующего этапа проверяют, подтверждено ли значение ValPosPedEmb. Если значение ValPosPedEmb не подтверждено, то значение VD5 равно 3, в противном случае осуществляют другой следующий этап.Во время другого следующего этапа проверяют, подтверждено ли значение ValPosPedEmb_MA. Если значение PosPedEmb_MA не подтверждено, то значение VD5 равно 1, в противном случае значение VD5 равно 0.
На фиг.6 представлен третий тип проверки, при котором на первом этапе вычисляют новое значение подтверждения на основании записанного в память значения или текущего значения при помощи модуля 27 анализа. На втором этапе определяют разность между записанным в память значением подтверждения и указанным новым значением подтверждения. Затем эту разность сравнивают с контрольным пороговым значением. Контрольное пороговое значение формирует модуль 28 формирования контрольных параметров.
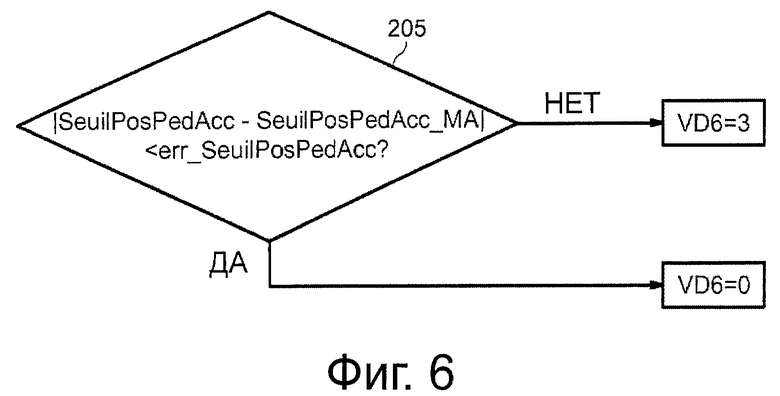
Этот третий тип проверки можно применять для проверки различных данных подтверждения, формируемых вычислительным устройством 3 системы помощи при трогании с места. Далее со ссылками на фиг.6 следует описание примера применения этого третьего типа проверки для значения SeuilPosPedAcc.
Как показано на фиг.6, проверяют значение SeuilPosPedAcc и формируют значение VD6 диагностики в зависимости от результата проверки.
Если была подана команда на отключение стояночного тормоза, пороговое значение SeuilPosPedAcc должно быть надежным. Осуществляют этап 205 проверки, на котором производят следующее сравнение:
abs(SeuilPosPedAcc - SeuilPosPedAcc _MA(PenteDA, Nmot))<err_SeuilPosPedAcc
где:
- abs: функция абсолютной величины
- SeuilPosPedAcc_MA(PenteDA, Nmot): пороговое значение положения педали акселератора, вычисленное модулем 27 анализа. Это вычисление производят при помощи картографии, которая дает пороговое значение положения педали акселератора в зависимости от записанного в памяти значения уклона PenteDA и от записанного в памяти режима двигателя Nmot
- err_ SeuilPosPedAcc: допустимое отклонение, формируемое модулем 28. Если проверка не показала подтверждения, то значение VD6 равно 3, в противном случае значение VD6 равно 0.
Кроме того, аналогично проверке, показанной на фиг.6, этот третий тип проверки можно применить для значения SeuilCroues. Таким образом, можно проверить значение SeuilCroues и сформировать значение VD7 диагностики в зависимости от результата проверки.
Если была подана команда на отключение стояночного тормоза, пороговое значение SeuilCroues должно быть надежным. Осуществляют этап проверки, на котором производят следующее сравнение:
abs(SeuilCroues - SeuilCroues_MA(PenteDA,Nmot))<err_SeuilCroues где:
- abs: функция абсолютной величины
- SeuilCroues_MA(PenteDA,Nmot): пороговое значение момента, передаваемого на колеса, вычисленное модулем 27 анализа. Это вычисление производят при помощи картографии, которая дает пороговое значение передаваемого на колеса момента в зависимости от записанного в памяти значения уклона PenteDA
-err_SeuilCroues: допустимое отклонение, формируемое модулем 28.
Если проверка не показала подтверждения, то значение VD7 равно 3, в противном случае значение VD7 равно 0.
Аналогично проверке, показанной на фиг.6, этот третий тип проверки можно применить для значения Croues. Таким образом, можно проверить значение Crones и сформировать значение VD8 диагностики в зависимости от результата проверки.
Если была подана команда на отключение стояночного тормоза, момент Croues, передаваемый на колеса, должен быть надежным. Осуществляют этап проверки, на котором производят следующее сравнение:
abs(Croues - Croues_MA(CourbeEmb,PosPedEmbAnt))<err_Croues
где:
- abs: функция абсолютной величины
- Croues_MA(CourbeEmb,PosPedEmbAnt); соответствует моменту, передаваемому на колеса, вычисленному модулем 27 анализа. Это вычисление производят при помощи линейной интерполяции записанной в памяти кривой сцепления CourbeEmb, которую оценивают для записанного в памяти прогнозируемого положения PosPedEmbAnt педали сцепления
- err_Croues: допустимое отклонение, формируемое модулем 28. Если проверка не показала подтверждения, то значение VD8 равно 3, в противном случае значение VD8 равно 0.
Аналогично проверке, показанной на фиг.6, этот третий тип проверки можно применить для значения CourbeEmb. Таким образом, можно проверить значение
CourbeEmb и сформировать значение VD9 диагностики в зависимости от результата проверки.
Если была подана команда на отключение стояночного тормоза, кривая сцепления CourbeEmb должна быть надежной. Осуществляют этап проверки, на котором производят следующее сравнение:
abs(Croues_MA(CourbeEmb_MA,PosPedEmbAnt)-
Croues_MA(CourbeEmb,PosPedEmbAnt))<err_ Couple
где:
- abs: функция абсолютной величины
- Croues_MA(CowbeEmb,PosPedEmbAnt): оценка момента, передаваемого на колеса, полученная при помощи линейной интерполяции записанной в памяти кривой сцепления CourbeEmb. Эту оценку производят для записанного в памяти прогнозируемого положения PosPedEmbAnt педали сцепления
- CourbeEmb _MA: новая кривая сцепления, выдаваемая модулем 28
- Croues_MA(CourbeEmb_MA,PosPedEmbAnt): оценка момента, передаваемого на колеса, полученная при помощи линейной интерполяции записанной в памяти новой кривой сцепления CourbeEmb _МА. Эту оценку производят для записанного в памяти прогнозируемого положения PosPedEmbAnt педали сцепления
- err_Couple: допустимое отклонение, формируемое модулем 28.
Если проверка не показала подтверждения, то значение VD9 равно 2 и свидетельствует о переоценке передаваемого на колеса момента в результате медленного реагирования на кривую сцепления, в противном случае значение VD9 равно 0.
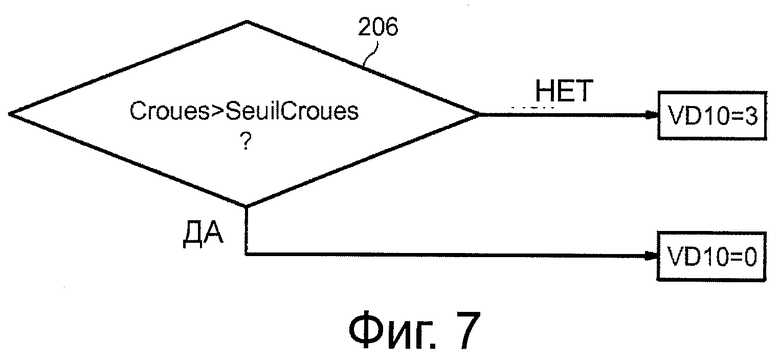
На фиг.7 представлен четвертый тип проверки, при котором сравнивают записанное в память значение, вычисленное модулем оценки, с записанным в память значением подтверждения.
Этот четвертый тип проверки можно применять для проверки различных данных о транспортном средстве, вычисленных средствами 10 и 11 вычисления. Далее со ссылками на фиг.7 следует описание примера применения этого четвертого типа проверки для значения Croues.
Как показано на фиг.7, проверяют значение Croues и формируют значение VD10 диагностики в зависимости от результата проверки. Если была подана команда на отключение стояночного тормоза, то момент Croues, передаваемый на колесе, должен быть больше порогового значения SeuilCroues, то есть записанное в память значение Croues следует считать надежной.
Во время этапа 206 проверяют, подтверждено ли следующее условие: Croues>SeuilCroues.
Если условие не подтверждено, значение VD10 равно 3, в противном случае значение VD10 равно 0.
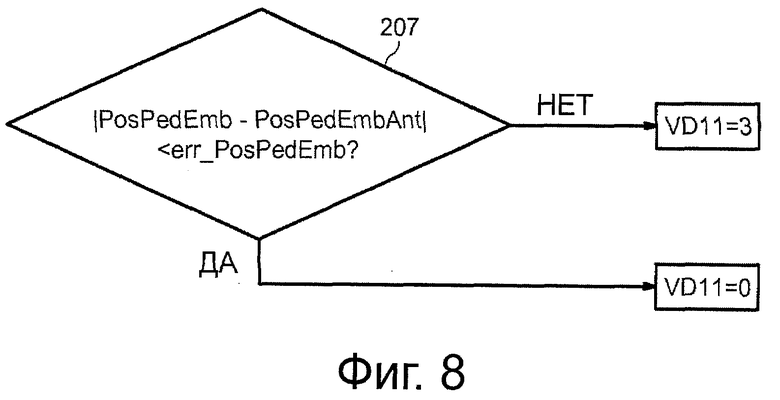
На фиг.8 представлен пятый тип проверки, при котором на первом этапе определяют разность между записанным в память параметром транспортного средства и записанным в память значением подтверждения. Затем эту разность сравнивают с контрольным пороговым значением. Контрольное пороговое значение формирует модуль 28 формирования контрольных переменных.
Этот пятый тип проверки можно применять для проверки различных данных о транспортном средстве, измеряемых датчиком. Далее со ссылками на фиг.8 следует описание примера применения этого пятого типа проверки для значения PosPedEmb,
Как показано на фиг.8, проверяют значение PosPedEmb и формируют значение VD11 диагностики в зависимости от результата проверки. Если была подана команда на отключение стояночного тормоза, отклонение между прогнозируемым положением PosPedEmbAnt и реальным положением PosPedEmb педали сцепления должно быть строго меньше порогового значения err_PosPedEmb.
На этапе 207 проверяют, подтверждено ли следующее условие:
abs(PosPedEmb - PosPedEmbAnt)<err_PosPedEmb
где:
- abs: функция абсолютной величины
- PosPedEmb и PosPedEmbAnt записанные в память значения
- err_PosPedEmb: допустимое отклонение, формируемое модулем 28.
Если условие не подтверждено, значение VD11 равно 3, в противном случае значение VD11 равно 0.
Кроме того, аналогично проверке, показанной на фиг.8, этот пятый тип проверки можно применить для значения Croues, когда используют второй модуль А2 оценки. Таким образом, можно проверить значение Croues и сформировать значение VD12 диагностики в зависимости от результата проверки.
Если была подана команда на отключение стояночного тормоза, момент на колесах Croues должен соответствовать разности между моментом СМЕ, создаваемым двигателем, и временной производной режима двигателя dNmot/dt, умноженной на инерцию двигателя Jm:
Таким образом, проверяют следующее условие:
abs(Croues - (СМЕ - Jm*dNmot/dt))<err_Couple
где:
- abs: функция абсолютной величины
- Jm; инерция двигателя
- dNmot/dt: временная производная режима двигателя
- err_Couple: допустимое отклонение, формируемое модулем 28.
Если условие не подтверждено, значение VD12 равно 3, в противном случае значение VD12 равно 0.
Описанные система и способ диагностики в основном применяют при жалобе водителя транспортного средства после одного или нескольких несвоевременных троганий с места. Предпочтительно модуль диагностики не устанавливают на транспортном средстве, а располагают снаружи транспортного средства. Таким образом, диагностику можно производить в соответствующей мастерской.
Изобретение относится к области технического обслуживания транспортных средств. При диагностике рабочего состояния системы помощи (2) при трогании с места автотранспортного средства, оборудованного управляемым стояночным тормозом (9), вычисляют элемент данных о транспортном средстве (значение уклона PenteDA, значение PosPedAcc положения педали акселератора, значение Nmot режима двигателя, значение PosVB положения рычага коробки передач, значение PosPedEmb положения педали сцепления, передаваемого на колеса момента Croues). Формируют данные подтверждения, связанные с указанным элементом данных о транспортном средстве. Записывают в энергонезависимое запоминающее устройство (22) соответствующие данные о транспортном средстве и связанные с ними данных подтверждения во время подачи команды на отключение стояночного тормоза (9). Формируют элемент данных диагностики на основании проверки достоверности записанных данных. Достигается апостериорная диагностика системы помощи при трогании с места. 2 н. и 10 з.п. ф-лы, 8 ил.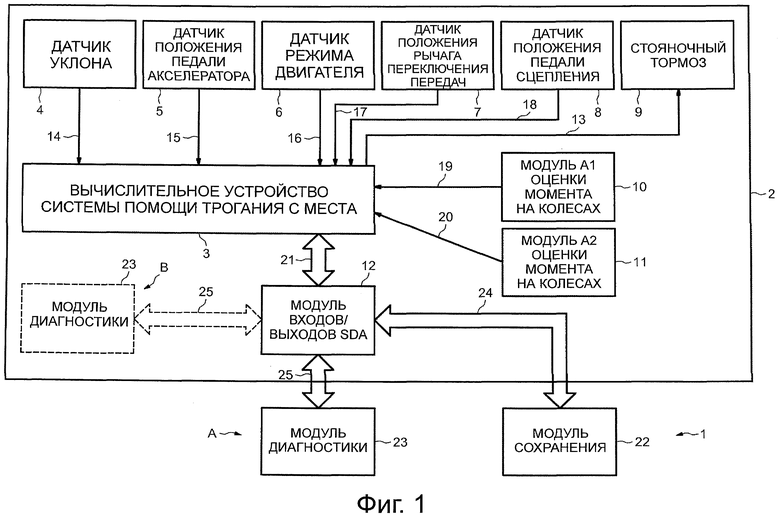
1. Способ диагностики рабочего состояния системы помощи при трогании с места автотранспортного средства, оборудованного управляемым стояночным тормозом, содержащий этап вычисления по меньшей мере одного элемента данных о транспортном средстве, этап подтверждения, на котором формируют по меньшей мере один элемент данных подтверждения, связанный с указанным элементом данных о транспортном средстве, этап записи в энергонезависимое запоминающее устройство элементов данных о транспортном средстве и связанных с ними элементов данных подтверждения во время подачи команды на отключение стояночного тормоза и этап диагностики, на котором формируют по меньшей мере один элемент данных диагностики на основании проверки достоверности записанных в память элементов данных.
2. Способ диагностики по п.1, в котором после этапа записи выполняют этап анализа, на котором вычисляют по меньшей мере один новый элемент данных подтверждения на основании по меньшей мере одного записанного элемента данных, при этом на этапе диагностики формируют по меньшей мере один элемент данных диагностики на основании сравнения нового элемента данных подтверждения по меньшей мере с одним записанным элементом данных.
3. Способ диагностики по п.2, содержащий этап измерения по меньшей мере одного другого элемента данных о транспортном средстве, при этом на этапе анализа вычисляют по меньшей мере один новый элемент данных подтверждения на основании по меньшей мере одного элемента текущих данных.
4. Способ диагностики по п.2, в котором подают команду в систему помощи при трогании с места для выполнения нового трогания с места с использованием системы помощи для получения по меньшей мере одного дополнительного элемента данных подтверждения, при этом на этапе анализа вычисляют по меньшей мере один новый элемент данных подтверждения на основании дополнительных элементов данных.
5. Способ диагностики по п.1, в котором выполняют этап записи в память при помощи устройства, установленного на автотранспортном средстве, а затем выполняют этапы анализа и диагностики при помощи устройства, находящегося снаружи указанного транспортного средства.
6. Способ диагностики по п.2, в котором этап анализа выполняют при разных условиях вычисления.
7. Система диагностики рабочего состояния системы (2) помощи при трогании с места автотранспортного средства, оборудованного управляемым стояночным тормозом (9), характеризующаяся тем, что система (2) помощи при трогании с места содержит по меньшей мере одно средство (10) вычисления элемента данных о транспортном средстве, предназначенного для вычислительного устройства (3) системы помощи при трогании с места, выполненного с возможностью управления отключением стояночного тормоза (9) и формирования по меньшей мере одного элемента данных подтверждения, связанного с указанным элементом данных о транспортном средстве; при этом система диагностики содержит модуль (22) сохранения для записи элементов данных о транспортном средстве и связанных с ними элементов данных подтверждения в энергонезависимое запоминающее устройство во время подачи команды на отключение стояночного тормоза и модуль (23) диагностики, выполненный с возможностью приема записанных элементов данных и содержащий модуль (29) проверки, выполненный с возможностью формирования по меньшей мере одного элемента данных диагностики на основании проверки достоверности записанных в память элементов данных.
8. Система диагностики по п.7, в которой модуль (23) диагностики содержит модуль (27) анализа для вычисления по меньшей мере одного нового элемента данных подтверждения на основании по меньшей мере одного записанного элемента данных, предназначенного для модуля (29) проверки, также выполненного с возможностью формирования по меньшей мере одного элемента данных диагностики на основании сравнения нового элемента данных подтверждения по меньшей мере с одним записанным элементом данных.
9. Система диагностики по п.8, в которой система (2) помощи при трогании с места содержит по меньшей мере один датчик (4) для измерения по меньшей мере одного другого элемента данных о транспортном средстве, предназначенного для вычислительного устройства (3) системы помощи при трогании с места, при этом модуль (23) диагностики выполнен с возможностью приема элементов текущих данных о транспортном средстве и связанных с ними элементов текущих данных подтверждения, а модуль (27) анализа выполнен с возможностью вычисления по меньшей мере одного нового элемента данных подтверждения на основании по меньшей мере одного элемента текущих данных.
10. Система диагностики по п.8, в которой вычислительное устройство (3) системы помощи при трогании с места выполнено с возможностью формирования по меньшей мере одного дополнительного элемента данных подтверждения во время подачи дополнительной команды на отключение стояночного тормоза (9), а модуль (27) анализа выполнен с возможностью формирования нового элемента данных подтверждения на основании дополнительных элементов данных подтверждения.
11. Система диагностики по п.7, в которой модуль (22) сохранения установлен на автотранспортном средстве, а модуль (23) диагностики находится снаружи указанного транспортного средства.
12. Система диагностики по п.8, в которой модуль (27) анализа выполнен с возможностью вычисления новых элементов данных при разных условиях вычисления.
| DE 102006027735 A1, 13.12.2007 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| FR 2845958 A1, 23.04.2004 | |||
| Система управления стояночным тормозом | 1986 |
|
SU1355522A1 |

