Настоящее изобретение относится к приводу, тип которого раскрыт во вводной части пункта 1 формулы настоящего изобретения. Ограничительная часть пункта 1 формулы составлена на основании международной заявки WO 2007/025550 А1, поданной от лица фирмы заявителя Linak.
Известно, что привод линейных перемещений содержит ходовой винт, приводимый в движение реверсивным электродвигателем посредством редуктора. На ходовом винте предусмотрена гайка, на которой закреплен приводной шток. Вращение гайки ходового винта заблокировано, в результате она перемещается по ходовому винту в направлении вовнутрь или в направлении наружу в зависимости от направления вращения двигателя. Вместе с гайкой ходового винта выдвигается или втягивается приводной шток.
В зависимости от того, в какую конструкцию установлен привод, он может обладать функцией быстрого опускания или функцией аварийного спуска. Как правило, функцией быстрого опускания оснащены приводы, предназначенные для использования в больничных и функциональных медицинских кроватях и обеспечивающие возможность мгновенно осуществлять быструю регулировку, то есть мгновенно опускать спинную секцию кровати в случае возникновения у пациента сердечного приступа или в случае, когда пациент впадает в кому. Обычно приводы, снабженные функцией аварийного спуска или выполненные с возможностью перехода на ручное управление, встроены в подъемники для больных и инвалидов и обеспечивают возможность опускания пациента в случае нарушения энергоснабжения. При этом задача заключается в том, чтобы как можно аккуратнее опустить пациента в течение определенного времени.
Настоящее изобретение относится к приводу с механизмом аварийного спуска. Примеры реализации данного привода известны из опубликованной заявки DE 19647556 А1, поданной от лица заявителя Рудольфа Вайнера (Rudolf Weiner), в которой приводной шток освобождается за счет извлечения штифта, после чего его можно ввернуть вручную, охватив рукой. В патентном документе DK 130460, заявителем которого является компания Триотим (Trioteam A/S), приводной шток фиксируется разрезной втулкой, которую можно ослабить посредством ручки управления. В опубликованной заявке DE 19950689 А1, поданной от лица фирмы заявителя Окин (Okin), раскрыта конструкция, имеющая две соединительные части, снабженные зубьями, которые входят в зацепление под действием пружины. При расцеплении соединительных частей приводной шток можно ввернуть вручную. В патентном документе ЕР 0789665, поданном от лица фирмы заявителя Лико (Liko), раскрыта конструкция с предварительно напряженным фрикционным диском, при этом трение таково, что в режиме нормального функционирования вращение приводного штока заблокировано. Однако указанное трение можно преодолеть за счет приложения внешнего крутящего момента, то есть за счет вращения втулки, в результате чего приводной шток перемещается в обратном направлении. В опубликованной заявке ЕР 1457710 А1, поданной от лица фирмы заявителя SKF, раскрыта конструкция, содержащая кулачковую муфту, окруженную цилиндрической винтовой пружиной, которая выполняет функцию тормоза. Поворот ручки управления на определенный угол вызывает освобождение кулачковой муфты. В результате нагрузка на установочные кронштейны приводит к тому, что гайка ходового винта и соединенный с ней приводной шток навинчиваются на ходовой винт, который не является самоблокирующимся, в направлении вовнутрь, вследствие чего кулачковая муфта вновь соединяется с возвратной пружиной и тем самым останавливает дальнейшее движение приводного штока. Таким образом, для того чтобы опустить груз, необходимо несколько раз привести в действие кулачковую муфту. Данная конструкция функционирует при условии, что система ходовой винт/гайка не является самоблокирующейся, то есть указанная конструкция не работает при самоблокирующемся ходовом винте. Кроме того, функционирование данной конструкции невозможно без нагрузки, поскольку именно наличие нагрузки обеспечивает движение приводного штока в обратном направлении.
Очевидно, что нагрузка постоянно действует на приводной шток, и для того чтобы зафиксировать приводной шток в каком-либо произвольно выбранном положении, следует обеспечить самоблокирующуюся систему ходовой винт/гайка. В случае использования ходового винта без автоматической блокировки необходимо обеспечить редуктор и двигатель, обладающие соответствующей способностью к самоблокировке, либо в качестве альтернативного варианта обеспечить привод, содержащий тормозное устройство. В такой конструкции результирующая сила, обусловленная нагрузкой, также действует на механизм аварийного спуска и тем самым способствует движению приводного штока в обратном направлении при активации механизма аварийного спуска.
Наконец, в опубликованной заявке WO 2007/025550 А1, поданной от лица фирмы заявителя Линак (Linak), раскрыта конструкция с цилиндрической винтовой пружиной, действующей в качестве фиксирующего механизма, некоторое число витков которой плотно навито вокруг цилиндрической части, соединенной с передним установочным кронштейном. Один конец пружины закреплен на другой цилиндрической части, соединенной с приводным штоком. При этом между двумя указанными цилиндрическими частями установлен шарикоподшипник. Конструкцию приводят в действие посредством ручки управления, выполненной в виде втулки, в которой закреплен верхний конец пружины, расположенный напротив цилиндрической части, соединенной с передним установочным кронштейном.
Недостаток механизмов аварийного спуска, известных из уровня техники, заключается в том, что они в значительной степени зависят от нагрузки и чувствительны к трению, которое в процессе функционирования механизма меняется со статического трения на кинематическое трение, которое в свою очередь зависит от температуры, износа, смазки и других факторов. В результате чего может возникнуть ситуация, когда опускание пациента происходит с неконтролируемой скоростью, либо когда для осуществления опускания необходимо приложить такой большой крутящий момент, что выполнение данного действия становится затруднительным или даже невозможным.
Настоящее изобретение заимствует конструкцию устройства, описанного в заявке WO 2007/025550 А1, поданной от лица фирмы заявителя Линак (Linak), поскольку данная конструкция отличается простотой и содержит небольшое число элементов.
Задача настоящего изобретения состоит в том, чтобы предложить механизм аварийного спуска, в котором учтены недостатки известных конструкций, то есть механизм аварийного спуска, который имеет простую конструкцию, содержит небольшое числа элементов, в определенной степени не зависит от нагрузки и отличается плавностью хода.
В соответствии с настоящим изобретением задача решена благодаря созданию привода, охарактеризованного признаками пункта 1 формулы. В данном случае некоторое число витков цилиндрической винтовой пружины навито вокруг цилиндрической части, соединенной с приводным штоком. Таким образом обеспечено плавное, регулируемое действие механизма аварийного спуска, подобное действию сервоустройства. Действие предложенного привода является плавным, регулируемым и в целом не зависит от нагрузки. Чем быстрее вращают ручку управления, тем быстрее приводной шток, закрепленный на гайке ходового винта, вворачивается в направлении вовнутрь, а груз соответственно перемещается вниз. При вращении ручки управления крутящий момент передается на цилиндрическую винтовую пружину, в результате чего верхняя часть пружины расширяется в достаточной степени для того, чтобы отпустить цилиндрическую часть, соединенную с приводным штоком. Важно, чтобы коэффициент жесткости пружины имел большое значение для того, чтобы даже малое вращение ручки управления приводило к ослаблению пружины. Диаметр цилиндрических частей, на которые навита пружина, также является важным фактором, влияющим на работу механизма. При прочих равных условиях, при большом диаметре в значительной степени снижается удерживающий момент, поэтому необходимо, чтобы диаметр цилиндрических частей был не слишком большим. Подходящим является такое значение диаметра, при котором возможен охват ручки управления одной рукой. Кроме того, для нормального функционирования механизма важно, чтобы витки пружины располагались друг за другом с большим зазором и не были предварительно напряжены относительно друг друга в осевом направлении. Таким образом, пружина является саморегулирующейся и постоянно стремится сохранить собственную удерживающую силу. Число витков, плотно навитых вокруг цилиндрической части, соединенной с приводным штоком, таково, что цилиндрическая винтовая пружина постоянно удерживает указанную цилиндрическую часть. Более того, для обеспечения удержания пружиной указанной цилиндрической части ее конец выполнен с возможностью крепления в данной цилиндрической части, а именно отогнутый конец пружины вставляется в выемку, выполненную в данной цилиндрической части. Пружина является жесткой настолько, что при приведении в действие ручки управления приводной шток вращается. Это становится возможным в силу того, что приводной шток отсоединен от переднего установочного кронштейна, а также из-за того, что между двумя цилиндрическими частями механизма аварийного спуска установлен равномерно вращающийся подшипник. При функционировании в ручном режиме приводной шток постоянно контролируется ручкой управления посредством соединения через пружину.
Далее представлено более подробное описание предпочтительного варианта предлагаемого изобретения со ссылкой на прилагаемые чертежи, на которых изображено следующее:
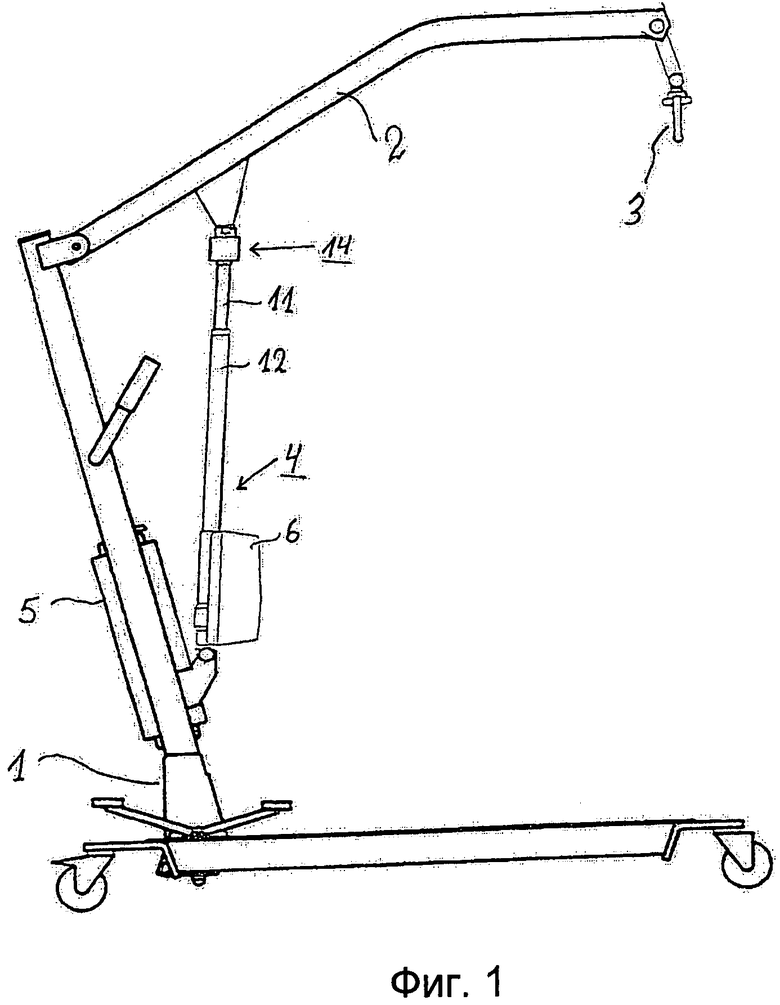
на фиг.1 показан вид сбоку на подъемник для пациентов;
на фиг.2 показан продольный разрез привода линейных перемещений;
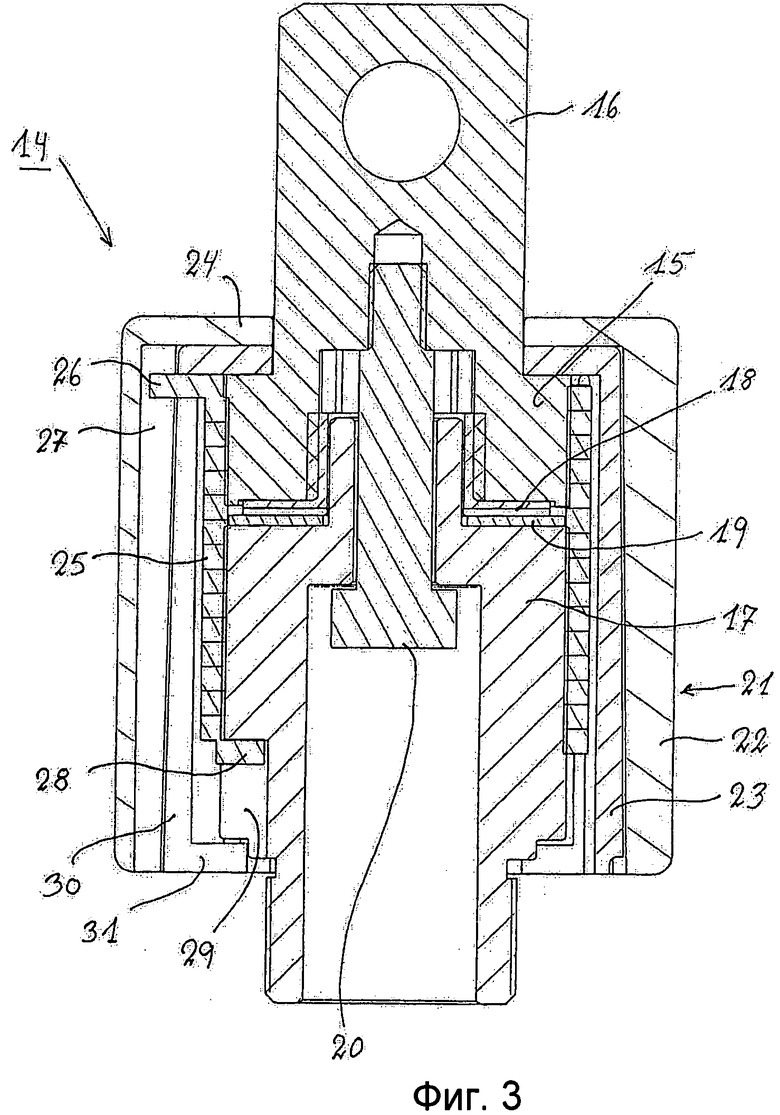
на фиг.3 показан продольный разрез механизма аварийного спуска;
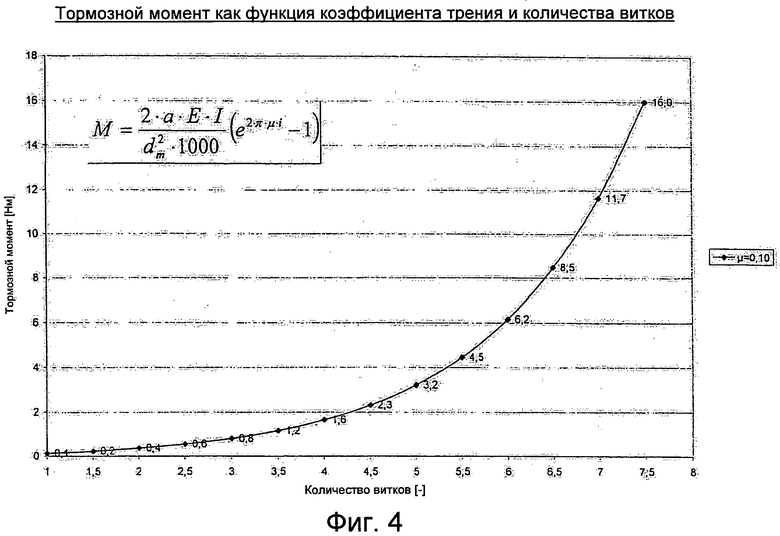
на фиг.4 изображена кривая тормозного момента для цилиндрической винтовой пружины;
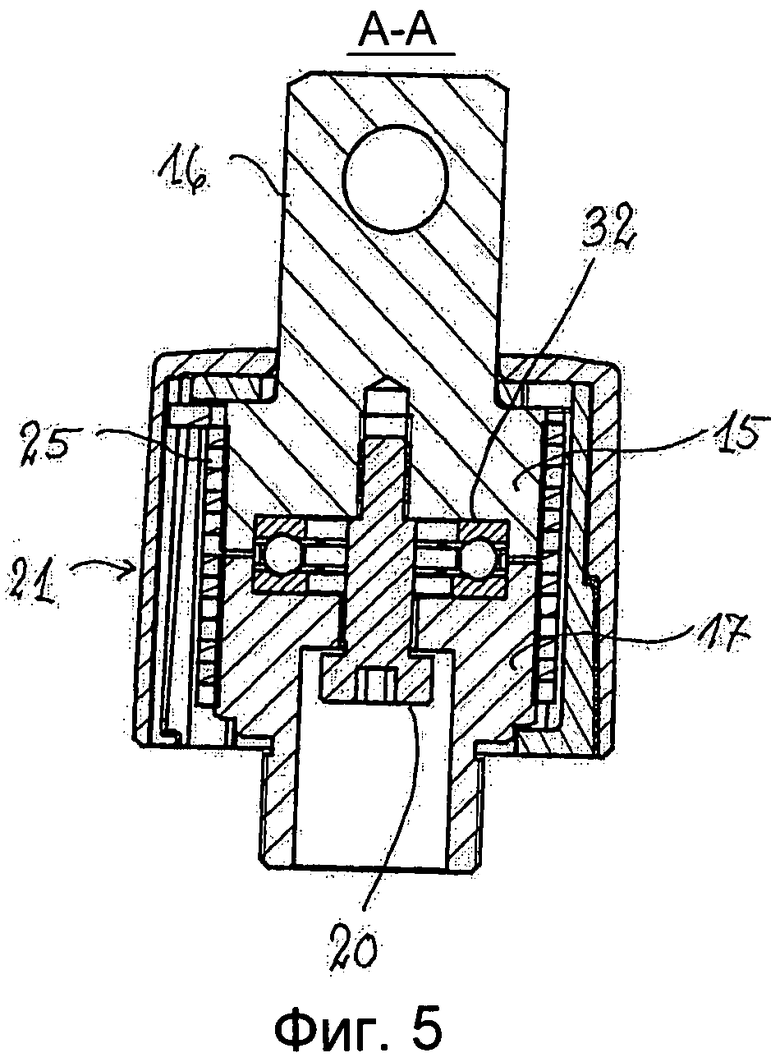
на фиг.5 показан продольный разрез другого варианта осуществления механизма аварийного спуска.
Подъемник для пациентов, изображенный на фиг.1, имеет стойку 1, оборудованную ведущими колесами. Консольная балка 2, выполненная с возможностью поворота относительно горизонтальной оси, одним концом прикреплена к стойке 1. К другому концу консольной балки прикреплен подъемный крюк 3, предназначенный для подъема пациентов. Подъем и опускание консольной балки 2 осуществляется посредством привода 4 линейных перемещений, который одним концом закреплен на стойке, а другим концом прикреплен к консольной балке 2. Блок 5 управления, содержащий управляющее устройство и аккумуляторные батареи для работы привода 4, установлен на стойке 1.
Как показано на фиг.2, основными элементами привода 4 являются корпус 6 с реверсивным электродвигателем 7, который посредством редуктора 8, в частности червячной передачи и зубчатой передачи, приводит в движение ходовой винт 9 с предусмотренной на нем гайкой 10, к которой прикреплен приводной шток 11 (в форме внутренней трубы), выполненный с возможностью перемещения внутри трубчатой части 12 (в форме внешней трубы) корпуса 6 и выдвижения из нее. Для крепления заднего конца привода корпус 6 оборудован задним установочным кронштейном 13.
На конце приводного штока 11 закреплен механизм 14 аварийного спуска. Как показано на фиг.3, механизм аварийного спуска имеет первую цилиндрическую часть 15, которая содержит установочный кронштейн 16, предназначенный для крепления переднего конца привода. Посредством цилиндрической части 17 механизм аварийного спуска прикреплен к концу приводного штока 11. Между двумя цилиндрическими частями 15, 17 установлен подшипник 18 скольжения, упорное кольцо которого блокирует его вращение в цилиндрической части 15. Для того чтобы обеспечить вращение подшипника 18 скольжения на ровной и гладкой поверхности, на верхней стороне цилиндрической части 17 под подшипником размещен стальной диск 19. Две цилиндрические части 15, 17 взаимно удерживаются в осевом направлении посредством болта 20, предназначенного только для того, чтобы исключить возможность отделения указанных цилиндрических частей друг от друга. Помимо двух цилиндрических частей 15 и 17 механизм аварийного спуска содержит ручку управления в форме втулки 21, состоящей из внутренней 23 и внешней 22 деталей, причем внешняя деталь 22 выполняет функция ручки управления. Втулка 21 имеет торцевую стенку 24, в которой выполнено отверстие, посредством которого втулка 21 насаживается на установочный кронштейн 16. Кроме того, втулка 21 установлена с возможностью вращения на верхней поверхности цилиндрической части 15. Вокруг цилиндрических частей 15 и 17 расположена предварительно напряженная цилиндрическая винтовая пружина 25. Конец 26 пружины, отогнутый наружу, закреплен в продольной направляющей 27, выполненной во втулке 21. Другой конец 28 пружины, отогнутый вовнутрь, закреплен в выемке 29, выполненной в цилиндрической части 17. Внутренняя деталь 23 втулки 21 имеет три упругие лапки 30, содержащие опору 31, которая проходит под цилиндрическую часть 17 и фиксирует положение втулки.
В случае нарушения энергоснабжения консольная балка 2 подъемника для пациентов опускается вручную посредством механизма аварийного спуска. При вращении ручки управления, а именно втулки 21, в направлении по часовой стрелке, конец 26 пружины также вращается в направлении по часовой стрелке, что в результате приводит к небольшому увеличению диаметра пружины. Вследствие чего конец 26 пружины отпускает цилиндрическую часть 15. Нижний конец пружины постоянно удерживается в цилиндрической части 17. Так как цилиндрическая часть 15, оснащенная установочным кронштейном 16, оказывается освобожденной от цилиндрической части 17, закрепленной на конце приводного штока 11, то приводной шток 11 начинает вращаться совместно с втулкой 21, а гайка 10 ходового винта навинчивается на ходовой винт 9 и перемещается в направлении вовнутрь, в результате чего приводной шток 12 втягивается обратно, а консольная балка 2 опускается в исходное положение. Если втулку 21 отпустить, верхняя часть пружины 25 мгновенно смыкается вокруг цилиндрической части 15.
Следует отметить, что пружина 25 в верхней части содержит пять витков, навитых вокруг цилиндрической части 15, а в нижней части - вдвое больше витков, навитых вокруг цилиндрической части 17. В результате обеспечено, что пружина 25 в любой момент времени удерживает цилиндрическую часть 17, и кроме того, цилиндрическая часть 17 постоянно управляется за счет движения втулки посредством пружины.
Для иллюстрации сил, возникающих в связи с работой цилиндрической винтовой пружины, на фиг.4 представлена кривая зависимости тормозного момента от числа витков пружины. Кривая вычислена по формуле Эйлера-Эйтельвайна (Euler-Eytelwein). Как видно из графика, тормозной момент существенно снижается в результате лишь незначительного вращения пружины, это связано с тем, что тормозной момент описан экспоненциальной функцией. При ослаблении только первого витка, в данном случае от 7,5 до 6,5 витка, значение тормозного момента уменьшается с 16,0 Нм до 8,5 Нм.
Это лишь подчеркивает, что ручка управления с самого начала способствует движению приводного штока, поскольку для того чтобы пружина ослабила свой захват вокруг цилиндрической части, соединенной с передним установочным кронштейном, вращение пружины почти не требуется.
На фиг.5 показан другой вариант осуществления механизма аварийного спуска. Отличие от варианта изобретения, изображенного на фиг.3, состоит лишь в том, что в данном случае использован упорный шарикоподшипник 32, который при прочих равных условиях обеспечивает снижение трения по сравнению с вариантом, в котором использован подшипник скольжения. Одинаковые детали на фиг.5 и на фиг.3 обозначены одинаковыми номерами позиций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ПРИВОД ДВЕРИ И ПОДВЕСКА ДВЕРИ С ЗАПОРНЫМИ УСТРОЙСТВАМИ, ПРИВОДИМЫМИ В ДЕЙСТВИЕ ОТ ДВИГАТЕЛЯ | 1993 |
|
RU2114976C1 |
| Способ изготовления цилиндрических спиральных пружин и устройство для его осуществления | 1985 |
|
SU1284645A1 |
| Электрический привод | 1986 |
|
SU1352140A1 |
| СРЕДСТВО ТРАНСПОРТНОЕ ВЕЗДЕХОДНОЕ | 2012 |
|
RU2531641C2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТРУБ | 1997 |
|
RU2128277C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2765326C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ | 2002 |
|
RU2202056C1 |
Настоящее изобретение относится к приводу линейных перемещений. Привод линейных перемещений содержит реверсивный электродвигатель (7), который посредством редуктора (8) вращает ходовой винт (9). На ходовом винте установлена гайка (10) ходового винта, к которой присоединен приводной шток (11). При этом на переднем конце приводного штока закреплен передний установочный кронштейн. Между приводным штоком и передним установочным кронштейном расположен механизм (14) аварийного спуска. 9 з.п. ф-лы, 5 ил.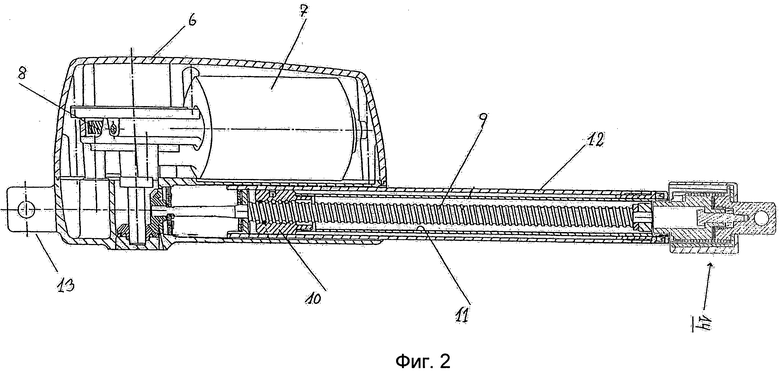
1. Привод, содержащий реверсивный электродвигатель (7), который посредством редуктора (8) вращает ходовой винт (9) вокруг его продольной оси, причем на указанном ходовом винте установлена гайка (10) ходового винта, к которой задним концом присоединен приводной шток (11), при этом на переднем конце приводного штока закреплен передний установочный кронштейн (16), совместно с задним установочным кронштейном (13), предназначенный для установки привода между подвижной и неподвижной частями конструкции, в которую встраивается данный привод, причем между приводным штоком и передним установочным кронштейном расположен механизм (14) аварийного спуска, содержащий:
a) первую цилиндрическую часть (15), соединенную с передним установочным кронштейном (16);
b) вторую цилиндрическую часть (17), соединенную с приводным штоком (11);
c) цилиндрическую винтовую пружину (25), действующую в качестве фиксирующего механизма, некоторое число витков которой плотно навито вокруг цилиндрической части (15), соединенной с передним установочным кронштейном (16), и которая своим концом (28) закреплена на второй цилиндрической части (17), соединенной с приводным штоком (11);
d) ручку (21) управления, выполненную в виде втулки, в которой закреплен другой конец (26) пружины (25), расположенный вне цилиндрической части (15), соединенной с передним установочным кронштейном (16);
e) подшипник (18), установленный между двумя цилиндрическими частями (15, 17);
причем две цилиндрических части (15, 17) установлены с возможностью вращения относительно друг друга при ослаблении цилиндрической винтовой пружины (25) посредством ручки (21) управления,
отличающийся тем, что некоторое число витков цилиндрической винтовой пружины (25) плотно навито вокруг цилиндрической части (17), соединенной с приводным штоком (11).
2. Привод по п.1, отличающийся тем, что подшипник (18) представляет собой подшипник скольжения с низким коэффициентом трения.
3. Привод по п.2, отличающийся тем, что между подшипником (18) скольжения и верхней стороной цилиндрической части (17) размещен стальной диск (19), обеспечивающий гладкую поверхность для подшипника скольжения.
4. Привод по п.1, отличающийся тем, что витки пружины расположены друг за другом с большим зазором.
5. Привод по п.1, отличающийся тем, что количество витков цилиндрической винтовой пружины (25), навитых вокруг цилиндрической части (17), соединенной с приводным штоком (11), больше чем количество витков указанной пружины (25), навитых вокруг цилиндрической части (15), соединенной с передним установочным кронштейном (16).
6. Привод по п.1, отличающийся тем, что втулка (21) содержит продольную направляющую (27), предназначенную для размещения конца (26) пружины (25), отогнутого наружу.
7. Привод по п.1, отличающийся тем, что в цилиндрической части (17), соединенной с приводным штоком (11), выполнена продольная выемка (29), предназначенная для размещения конца (28) пружины (25), отогнутого вовнутрь.
8. Привод по п.1, отличающийся тем, что втулка (21) содержит внешнюю и внутреннюю цилиндрические детали (22, 23), снабженные соединительными средствами.
9. Привод по п.9, отличающийся тем, что содержит упругие лапки (30), выполненные на внутренней детали (23), причем указанные упругие лапки имеют опору (31), предназначенную для взаимодействия с соответствующими выемками в крае цилиндрической части (17) с целью фиксации положения внутренней детали (23) путем защелкивания.
10. Привод по п.1, отличающийся тем, что подшипник представляет собой опорный шарикоподшипник (32).
| WO 2007025550 A1, 08.03.2007 | |||
| EP 1457710 A1, 15.09.2004 | |||
| Исполнительный механизм линейных перемещений следящего привода | 1982 |
|
SU1145187A1 |
| Винтовой домкрат | 1990 |
|
SU1735205A1 |
| Привод подъемника | 1987 |
|
SU1590431A1 |

