Изобретение относится к устройству для отделения частей разрезанного продукта, в частности рыбного филе, содержащему транспортировочный элемент для транспортировки разрезанного продукта, части которого еще находятся вместе, в направлении Т транспортировки, средство поперечного перемещения частей продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки, и транспортировочный элемент для удаления отделенных частей продукта. Кроме того, изобретение относится к соответствующему способу отделения частей разрезанного продукта.
Такие устройства и способы применяют в различных отраслях промышленности, в частности в пищевой промышленности, например в рыбообрабатывающей промышленности. В частности, при обработке тресковых рыб филе разделяют на порции. Так, рыбные филе, которые обычно транспортируют хвостом вперед, посредством продольных и/или наклонных, и/или поперечных разрезов разделяют на несколько частей, т.е. на отдельные порции. Эти порции после разрезания еще находятся рядом друг с другом на транспортировочном элементе и подлежат отделению и сортировке с целью получения потоков однородных по сорту продуктов.
Рыбное филе обычно разрезают на так называемые филейную, брюшную и хвостовую части. Более мелкое разделение предусматривает разрезание рыбного филе на так называемые длинную филейную, брюшную, остаточную и тонкую хвостовую части. Из-за продольных разрезов в рыбных филе, т.е. разрезов, ориентированных в направлении Т их транспортировки, отдельные части продукта расположены рядом друг с другом в направлении транспортировки. Например, в рыбном филе рядом друг с другом расположены филейная и брюшная части.
Указанные части продукта приведены только для примера и не ограничивают тип продукта. Сказанное выше справедливо и для другого продукта пищевой промышленности, например для птицы (например, грудные филе), а также для продукта других областей промышленности, например бумаги и т.п.
Устройства для сортировки продукта в принципе известны. Например, в DE 9408979 U1 описано устройство, содержащее толкатели, которые могут перемещаться в вертикальном и горизонтальном направлениях. Толкатели служат для стягивания отдельного продукта с транспортировочного элемента в накопительную область или на другой транспортировочный элемент. Для этого толкатель сталкивает продукт как единое целое с транспортировочного элемента или полностью захватывает продукт для его стягивания на другой транспортировочный элемент. Однако многие виды продукта, в особенности влажный и/или липкий продукт, каким является, например, рыбные филе, совершенно не годятся для сдвигания. Кроме того, в устройстве, описанном в указанном документе, продукт может перемещаться в поперечном направлении только как одно целое и устройство не может отделять части продукта друг от друга.
Чтобы отделять отдельные части разрезанного продукта, их до сих пор снимали с транспортерной ленты вручную. Правда, существует возможность по меньшей мере частично механизировать отделение и сортировку продукта, который уже был разрезан, например рыбного филе, но в том случае, если части продукта расположены в направлении транспортировки друг за другом. Например, отделение и сортировка таких частей продукта могут осуществляться при помощи скоростных лент. Однако такой способ разделения и сортировки не подходит для частей продукта, лежащих рядом друг с другом, таких как филейная часть или длинная филейная часть.
Поэтому в основе изобретения лежит задача создать устройство, которое обеспечивает автоматизированное и бережное отделение частей продукта, расположенных рядом друг с другом в направлении транспортировки.
Эта задача решена тем, что указанное выше устройство дополнительно содержит средство определения положения продукта на транспортировочном элементе и регистрации специфических данных продукта, при этом средство поперечного перемещения содержит по меньшей мере два пальца, которые выполнены с возможностью введения в разрезы между частями продукта и/или прилегания к частям продукта и могут управляться в соответствии с положением продукта и его специфическими данными с целью перемещения в поперечном направлении Q. Благодаря этому можно отделять части продукта, расположенные на транспортировочном элементе рядом друг с другом в поперечном направлении, без повреждения других частей продукта или без изменения их положения, посредством того, что пальцы продукта могут целенаправленно подводиться к отдельным частям продукта, захватывать их и перемещать в поперечном направлении Q, удаляя с транспортировочного элемента. Благодаря информации о точном положении продукта и его индивидуальным данным (в частности, геометрическим и/или графическим данным), с одной стороны, и взаимодействию пальцев с частями продукта, с другой стороны, части продукта, хотя они транспортируются непрерывно, могут отделяться друг от друга с образованием потоков односортных частей продукта (например, только филейных частей или только длинных филейных частей).
Пальцы предпочтительно выполнены с возможностью тянуть части продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки. Благодаря этому даже влажный и липкий продукт или его часть можно удалять с транспортировочного элемента без повреждения или других отрицательных последствий.
Целесообразно, чтобы все пальцы были нагружены усилием пружины. Благодаря тому, что силовое замыкание между пальцами и продуктом образовано при помощи пружин, имеет место щадящее обращение с продуктом.
Согласно одному предпочтительному варианту осуществления изобретения все пальцы установлены в общем держателе с возможностью перемещения из положения ожидания в рабочее положение и обратно, а держатель имеет по меньшей мере одну дополнительную степень свободы для выполнения перемещения в поперечном направлении Q. Таким образом, простым и эффективным путем достигается равномерное тянущее движение в поперечном направлении, так что ориентация стягиваемых с транспортировочного элемента частей продукта не изменяется.
Целесообразно, чтобы держатель был установлен с возможностью поворота вокруг оси С, которая проходит вертикально по отношению к плоскости транспортировки продукта, таким образом, что установленные на держателе пальцы могут переводиться в различные угловые положения относительно направления Т транспортировки. Таким образом, в пределах плоскости транспортировки пальцы могут принимать различные положения относительно продукта или его частей. При расположении продукта на транспортировочном элементе под углом пальцы, несмотря на это, могут точно размещаться в разрезах или на соответствующих частях продукта. Кроме того, благодаря повороту во время поперечного перемещения можно компенсировать различие инерции масс частей продукта, например, для рыбного филе с головной и хвостовой частями.
Согласно одному предпочтительному варианту осуществления изобретения пальцы могут управляться группами, но предпочтительно, чтобы они управлялись индивидуально. Это обеспечивает возможность индивидуального и щадящего обращения с продуктом и улучшает точность и надежность при отделении частей продукта.
Задача изобретения решается также тем, что описанный выше способ включает следующие операции: транспортировку разрезанного продукта, части которого еще находятся вместе, в направлении Т транспортировки с помощью транспортировочного элемента; определение положения продукта на транспортировочном элементе и регистрацию специфических данных продукта; перемещение частей продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки, путем введения по меньшей мере двух пальцев в разрезы между частями продукта и/или их прилегания к частям продукта и управления пальцами в соответствии с положением продукта и его специфическими данными с целью перемещения в поперечном направлении Q; и удаление отделенных частей продукта. Преимущества, которые обеспечивает способ согласно изобретению, были изложены при описании устройства и во избежание повторений здесь не указываются.
Особенно предпочтительно стягивать части продукта с транспортировочного элемента, при этом во время стягивания пальцы поворачиваются вокруг вертикальной оси С. Благодаря этому достигается, в частности, то, что длинные части продукта с разной инерцией масс, что имеет место у длинных филейных частей, укладываются как можно более параллельно направлению Т транспортировки, даже если продукт на транспортировочном элементе расположен под углом к направлению транспортировки.
Другие целесообразные и/или выгодные варианты выполнения устройства и операции способа описаны в зависимых пунктах формулы и в описании изобретения. Особенно предпочтительный вариант выполнения устройства и способа описан подробно со ссылками на чертежи, где:
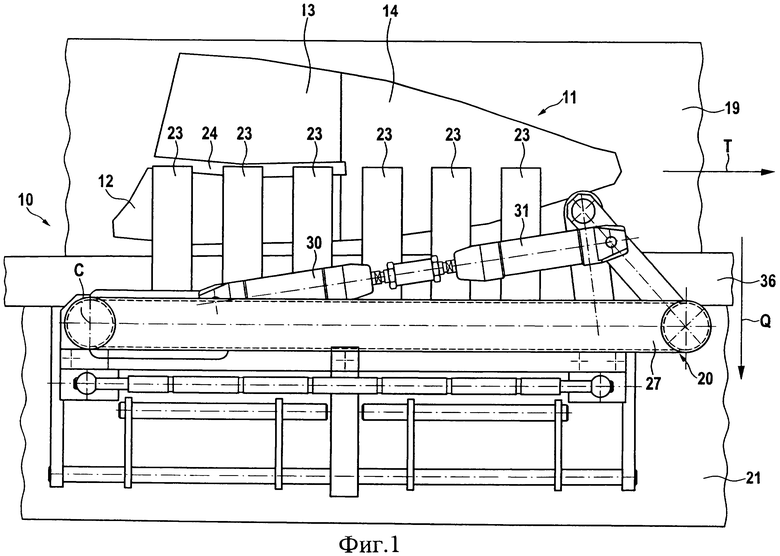
фиг.1 изображает вид сверху устройства согласно изобретению с пальцами, которые с целью поперечного перемещения филейной части входят в разрез, выполненный между филейной частью и брюшной частью, при этом пальцы, расположенные за пределами филейной части, находятся в положении ожидания,
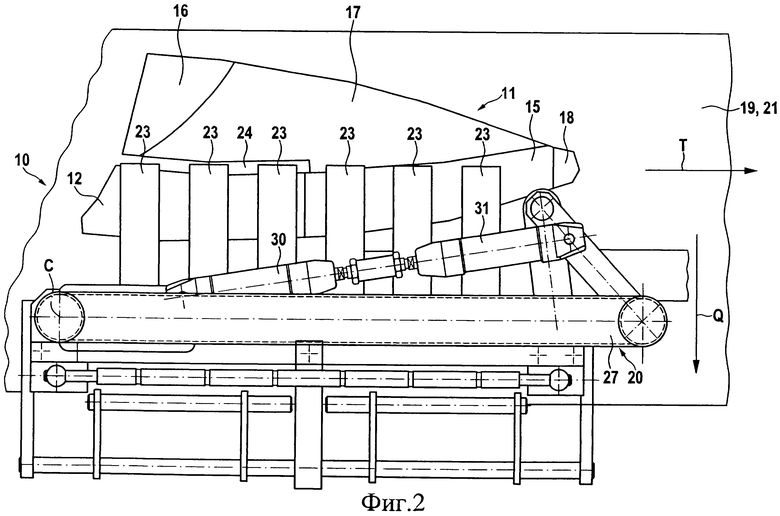
фиг.2 - вид сверху устройства с пальцами, которые с целью поперечного перемещения длинной филейной части с одной стороны входят в разрез между длинной филейной частью и брюшной частью, а с другой стороны прижимаются к длинной филейной части,
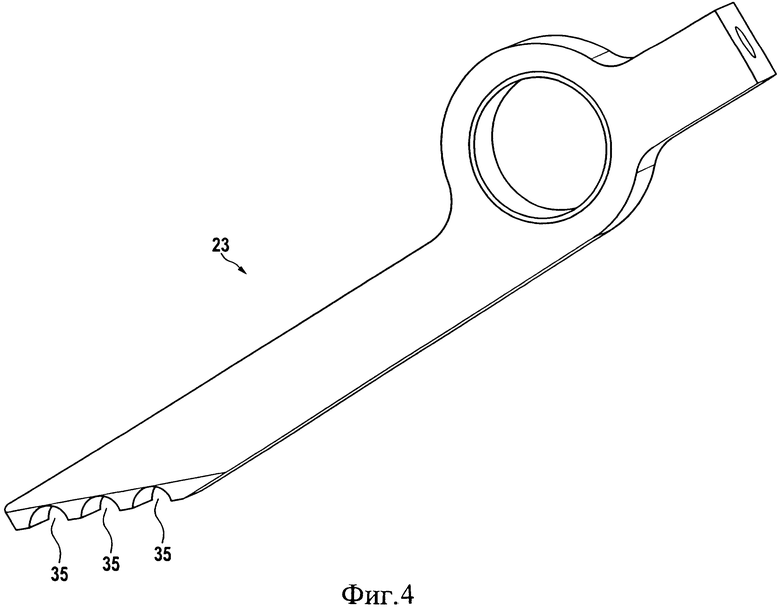
фиг.3 - вид устройства спереди, и
фиг.4 - палец, выполненный с возможностью прилегания к частям продукта с силовым замыканием.
Изображенное на чертежах устройство служит для отделения частей разрезанного рыбного филе. Разумеется, с помощью этого устройства можно разделять другие пищевые продукты и продукты других областей промышленности.
Устройство 10 служит для отделения частей разрезанного продукта 11, например рыбного филе. Отдельные части рыбного филе указаны на фиг.1 и 2, при этом количество и наименование частей продукта могут варьироваться. Рыбное филе обычно разрезают на филейную часть 12, брюшную часть 13 и хвостовую часть 14 (см. фиг.1) или на длинную филейную часть 15, брюшную часть 16, остаточную часть 17 и тонкую хвостовую часть 18 (см. фиг.2). Эти (или другие) части продукта расположены на транспортировочном элементе 19 для транспортировки отрезанных, но еще находящихся вместе, частей продукта в направлении Т транспортировки. Транспортировочным элементом 19 может быть обычный циркулирующий сетчатый транспортер с вакуум-подсосами. Однако возможны и другие варианты выполнения транспортировочного элемента 19, например он может представлять собой бесконечную транспортерную ленту или т.п. Особенно предпочтительно использовать транспортировочные элементы 19 с гладкой и скользкой поверхностью, возможно даже смачиваемой водой для достижения лучшего скольжения. С транспортировочным элементом 19 соединено средство 20 перемещения частей продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки. Кроме того, устройство 10 содержит транспортировочный элемент 21 для удаления отделенных частей продукта. Транспортировочный элемент 21 может быть идентичным транспортировочному элементу 19. Другими словами, в таком случае для перемещения и удаления предусмотрен единый транспортировочный элемент. Однако предпочтительно иметь раздельные транспортировочные элементы 19 и 21 (см. ниже).
Согласно изобретению устройство 10 также содержит средство (не показано) для определения положения продукта 11 на транспортировочном элементе 19 и регистрации специфических данных продукта. Альтернативно это средство может входить в состав машин, расположенных перед устройством 10, например в состав машины для разрезания продукта 11. Предпочтительно это средство выполнено с возможностью регистрации или определения информации о положении продукта 11 на транспортировочном элементе 19, а также геометрических данных и/или графической информации о соответствующем продукте 11, и передачи ее через средство управления (не показано) в средство 20 поперечного перемещения. Само средство 20 поперечного перемещения содержит по меньшей мере два пальца 23, которые выполнены с возможностью введения в разрезы 24 между частями продукта и/или прилегания к частям продукта. Пальцы 23 управляются для их поперечного перемещения в соответствии с положением продукта 11 и его специфическими данными. Иначе говоря, пальцы 23 продукта могут приводиться в действие на основании информации, зарегистрированной и определенной при помощи соответствующего средства, так что отдельные части продукта 11 могут целенаправленно отделяться от него и подаваться в отдельный поток продукта.
Средство 20 поперечного перемещения предпочтительно расположено над транспортировочным элементом 19 так, что на продукт 11 или на части продукта можно воздействовать сверху. Пальцы 23 выполнены так, что они могут тянуть части продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки. Это касается в особенности пальцев 23, прилегающих к частям продукта. Однако даже пальцы 23, охватывающие подлежащую перемещению часть продукта и заходящие в разрез 24, выполняют по существу тянущее движение, так как перемещают части продукта в направлении к средству 20, которое обеспечивает это движение.
Все пальцы 23 нагружены усилием пружины, а именно пружинные элементы 25 смещают пальцы 23 вниз в рабочее положение так, что они прижимаются к частям продукта или входят в разрезы 24. Для управления пальцами 23 с ними соединены пневматические цилиндры 26 или аналогичные элементы, которые, преодолевая усилие пружины, перемещают пальцы 23 в (верхнее) положение ожидания. Перемещение пальцев 23 может обеспечиваться также при помощи других исполнительных элементов. Все пальцы 23 могут приводиться в действие и управляться синхронно общим механизмом. Однако предпочтительно, чтобы пальцы 23 управлялись группами, а особенно предпочтительно, чтобы они управлялись индивидуально.
Все пальцы 23, количество которых предпочтительно равно шести, но может быть и другим, установлены в общем держателе 27 с возможностью перемещения из (верхнего) положения ожидания в (нижнее) рабочее положение, и наоборот, при помощи указанных пружинных элементов 25, с одной стороны, и при помощи пневматических цилиндров 26, с другой стороны. Как было сказано, движение пальцев 23 может осуществляться при помощи других традиционных приводов, например исполнительных или шаговых двигателей, или т.п. Пальцы 23 предпочтительно установлены в держателе 27 с возможностью поворота вокруг оси В. Держатель 27 имеет по меньшей мере одну дополнительную степень свободы для движения в поперечном направлении Q. Иначе говоря, держатель 27 может по выбору поворачиваться вокруг по меньшей мере одной дополнительной оси и/или перемещаться линейно вдоль по меньшей мере одной дополнительной оси. Предпочтительно держатель 27 установлен с возможностью поворота вокруг оси А, которая расположена над плоскостью Е транспортировки и проходит в направлении Т транспортировки. Для этого держатель 27 установлен на коромысле 28, на его свободном конце 29, противоположном оси А. Коромысло 28 может представлять собой, например, рычаг или подобный элемент. Возможно и другое выполнение коромысла 28. Поворотное движение осуществляется предпочтительно при помощи управляемых приводных элементов, например исполнительного двигателя или шагового двигателя. Могут использоваться и другие приводные элементы. Вместо поворотного движения пальцев 23 и коромысла 28 могут быть также реализованы движение при помощи линейного привода, комбинированное движение или движение при помощи других традиционных приводов.
В следующем варианте осуществления изобретения держатель 27 может иметь дополнительную степень свободы. Например, держатель 27 может быть установлен с возможностью поворота вокруг оси С, которая проходит вертикально по отношению к плоскости Е транспортировки продукта 11 таким образом, что пальцы 23 в пределах плоскости Е транспортировки могут переводиться в различные угловые положения относительно направления транспортировки. Для этого держатель 27 установлен на свободном конце 29 коромысла 28 с возможностью поворота или качания. Например, при помощи пневматического цилиндра 30 может быть образована первая ступень поворота держателя 27 вокруг оси С из исходного положения, в котором он ориентирован по существу параллельно транспортировочному элементу 19 или направлению Т транспортировки. При помощи дополнительного пневматического цилиндра 31 может быть реализована дополнительная возможность поворота. Поворот вокруг оси С из исходного положения возможен в обоих направлениях. Поворот держателя 27 может осуществляться бесступенчато.
Все пальцы 23 могут быть одинаковыми. Однако предпочтительно, чтобы они были приспособлены к геометрическим параметрам продукта и/или к положению и компоновке отдельных частей продукта относительно друг друга и/или к выполнению разрезов 24. Например, отдельные или некоторые пальцы 23 могут быть выполнены с возможностью образования (преимущественно) геометрического замыкания, а другие пальцы 23 - с возможностью образования (преимущественно) силового замыкания. Как сказано выше, все пальцы 23 через пружинные элементы 25 в некоторой мере воздействуют на продукт 11 с силовым замыканием, что, однако, можно не учитывать для гладкого продукта 11, каким является рыбное филе.
В варианте выполнения, представленном на чертежах, три пальца 23 выполнены в форме крюка (см., например, фиг.3) с целью образования геометрического замыкания с продуктом 11. Крюкообразная форма особенно подходит для введения пальцев 23 в разрезы 24 между частями продукта, причем разрез 24 между филейной частью 12 и брюшной частью 13 выполнен особенно широким из-за так называемого седалищного реза. Образующий геометрическое замыкание крюк 32 пальца 23 имеет так называемую тянущую кромку 33 для прилегания к части продукта, подлежащей поперечному перемещению. Этой кромкой 33 палец 23 входит в разрез 24. На стороне, обращенной к верхней стороне частей продукта, палец 23 имеет удерживающий элемент 34, который одновременно действует как прижим. Разумеется, выполнение пальцев 23 с целью образования геометрического замыкания может быть другим.
Другие пальцы 23 продукта, преимущественно образующие силовое замыкание, показаны подробно на фиг.4. Эти пальцы 23 выполнены без крюков 32 и имеют на стороне, обращенной к верхней стороне частей продукта, поверхность, форма которой способствует фрикционному замыканию. Эта поверхность может быть выполнена различным образом. Особенно предпочтительно наличие на ней нескольких канавок 35, которые проходят перпендикулярно к поперечному направлению Q. Эти канавки 35 образуют шероховатую поверхность или контактную поверхность между пальцами 23 продукта, с одной стороны, и частями продукта, с другой стороны. Форма поверхности, например в варианте выполнения с канавками 35, выбрана также с учетом гигиенических аспектов, т.е. канавки 35 выполнены такими, чтобы чистить контактную поверхность можно было бы просто. Количество, ориентацию и форму канавок 35 можно изменять. Канавки 35 можно заменить другими конструктивными элементами, например стержнями и т.п. Что касается длины пальцев 23, то все они могут иметь одинаковую длину, однако предпочтительно, чтобы пальцы 23, предназначенные для образования силового замыкания, были несколько короче пальцев 23, предназначенных для образования геометрического замыкания.
Как указано выше, кроме транспортировочного элемента 19 для транспортировки продукта 11 предусмотрен дополнительный транспортировочный элемент 21 для удаления отделенных частей продукта. Транспортировочные элементы 19 и 21 предпочтительно расположены рядом друг с другом примерно на одинаковой высоте, т.е. транспортировочные элементы 19 и 21 расположены в одной плоскости Е транспортировки. Однако транспортировочные элементы 19, 21 могут быть смещены по высоте друг относительно друга. Оба транспортировочных элемента 19, 21 предпочтительно расположены рядом друг с другом, так что между ними остается малое пространство. Допустимые (и сознательно выбранные) пространства между транспортировочными элементами могут быть перекрыты промежуточным металлическим листом 36 или подобным элементом. Промежуточные металлические листы 36 способствуют поперечному перемещению частей продукта с транспортировочного элемента 19 на транспортировочный элемент 21 или, по меньшей мере, не мешают этому перемещению. Что касается направления Т транспортировки, то оба транспортировочных элемента 19, 21 предпочтительно движутся в одном направлении, но могут двигаться в противоположных направлениях.
Изобретение не ограничено описанным вариантом его осуществления. Например, средство 20 поперечного перемещения может находиться в другом положении, например, сбоку от транспортировочного элемента 19. В описанном устройстве 10 продукт 11, а именно рыбное филе, транспортируется хвостом вперед, но может транспортироваться головой вперед. При отделении другого продукта 11 или частей продукта, например птицы, стопок бумаги или т.п., возможны совершенно другое расположение транспортировочных средств и направление транспортировки. Разумеется, устройство 10 пригодно также для отделения или сортировки окончательного продукта 11 как целого или частей продукта, которые отделены от продукта 11 не разрезанием, а другим способом.
Ниже при помощи чертежей подробнее описан принцип способа. Продукт 11 непрерывно транспортируют в продольном направлении на транспортировочном элементе 19 через устройство 10, в частности под средством 20 поперечного перемещения. В принципе возможна также прерывистая транспортировка. При подходе к устройству 10 продукт 11 разрезают на несколько частей, которые еще находятся вместе на транспортировочном элементе 19. По выбору положение продукта 11, а также специфическая для продукта информация определяется и регистрируется в устройстве или передается с предыдущей машины, например с машины для разрезания продукта 11. Чтобы отделить части продукта, т.е. извлечь их в боковом или поперечном направлении, или чтобы отделить их от остальных частей продукта 11, над ним устанавливают пальцы 23 в надлежащем положении. На основании специфических данных продукта 11 и информации о его положении на транспортировочном элементе 19 пальцы 23 точно позиционируют путем поворота вокруг оси А и/или оси С, прежде чем их поворачивают вокруг оси В вниз из положения ожидания в рабочее положение. При этом пальцы 23 входят в разрезы 24 и/или прижимаются к подлежащей отделению части продукта. Как только между пальцами 23 и частью продукта будет образовано геометрическое и/или силовое замыкание, расположенные в держателе 27 пальцы 23 поворачивают вместе с держателем 27 при помощи коромысла 28 вокруг оси А так, что пальцы тянут части продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки, в сторону от транспортировочного элемента 19 или на следующий транспортировочный элемент 21, расположенный рядом с транспортировочным элементом 19. Затем пальцы 23 поднимают обратно в положение ожидания и части продукта освобождаются. Затем отделенные части продукта удаляют.
В варианте выполнения согласно фиг.1 в разрез 24 с целью отделения филейной части 12 входят лишь первые три, в направлении Т транспортировки, пальца 23, имеющие форму крюка. Следующие три пальца 23, расположенные сзади в направлении Т транспортировки, находятся в положении ожидания, на расстоянии от продукта 11. Путем поворота держателя 27 вокруг оси А отделяют филейную часть 12. Для отделения длинной филейной части 15 (см. фиг.2) все пальцы 23 находятся в рабочем положении, т.е. введены в разрезы и прилегают к части продукта. Путем поворота держателя 27 вокруг оси А отделяют длинную филейную часть 15. По выбору, пальцы 23 или держатель 27, по меньшей мере в конце поперечного перемещения, можно дополнительно повернуть вокруг вертикальной оси С, чтобы компенсировать разную инерцию масс части продукта и обеспечить укладку длинной филейной части 15 параллельно направлению Т транспортировки. Благодаря индивидуальному управлению пальцами 23 дополнительно имеется возможность выводить из разрезов или из контакта отдельные пальцы 23 или те пальцы 23, которые тянут участок части продукта, обладающий большей инерцией, раньше, чем те пальцы 23, которые тянут участок части продукта, обладающий меньшей инерцией.
Впрочем, пальцы 23 могут приводиться в действие независимо друг от друга, например, с целью приспособления к различным размерам продукта. Комбинация пальцев 23, введенных в разрезы или находящихся в контакте, и продолжительность нахождения в разрезах или в контакте выбираются произвольно.
Устройство включает транспортировочный элемент (19) для транспортировки разрезанного продукта (11), части которого еще находятся вместе, в направлении транспортировки, средство (20) перемещения частей продукта в поперечном направлении и транспортировочный элемент (21) для удаления отделенных частей продукта. Также устройство содержит средства определения положения продукта (11) на транспортировочном элементе (19) и регистрации специфических данных продукта. Средство (20) поперечной подачи содержит, по меньшей мере, два пальца (23) для введения в разрезы (24) между частями продукта и/или для прилегания к частям продукта, причем пальцы могут управляться в соответствии с положением продукта и его специфическими данными с целью перемещения в поперечном направлении. Изобретение также относится к соответствующему способу. Изобретение обеспечивает автоматизированное и бережное отделение частей продукта, расположенных рядом друг с другом. 2 н. и 16 з.п. ф-лы, 4 ил.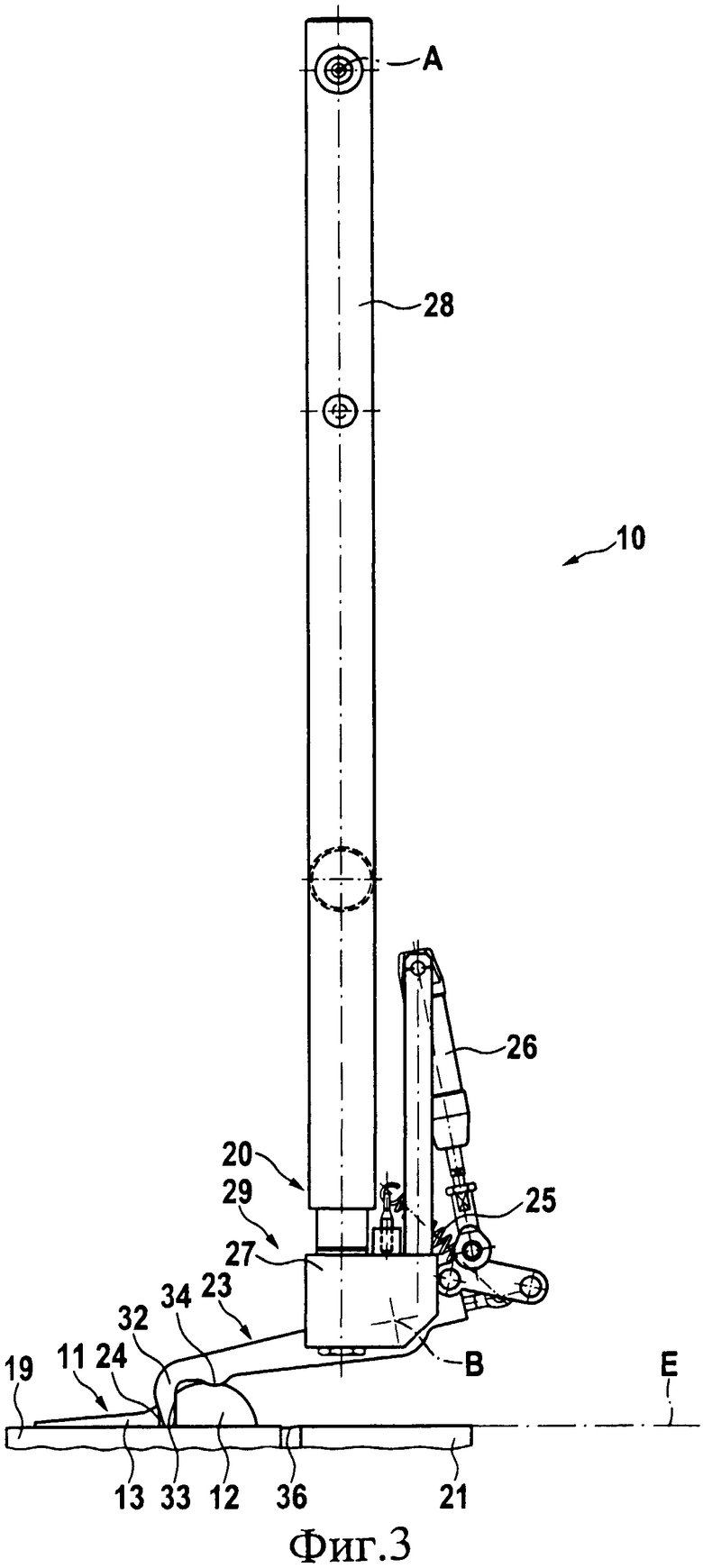
1. Устройство (10) для отделения частей разрезанного продукта (11), в частности рыбного филе, содержащее транспортировочный элемент (19) для транспортировки разрезанного продукта (11), части которого еще находятся вместе, в направлении Т транспортировки, средство (20) поперечного перемещения частей продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки, и транспортировочный элемент (21) для удаления отделенных частей продукта, отличающееся тем, что устройство (10) содержит также средство определения положения продукта (11) на транспортировочном элементе (19) и регистрации специфических данных продукта, причем средство (20) поперечного перемещения содержит, по меньшей мере, два пальца (23), которые выполнены с возможностью введения в разрезы (24) между частями продукта и/или прилегания к частям продукта и могут управляться в соответствии с положением продукта и его специфическими данными, с целью перемещения в поперечном направлении Q.
2. Устройство по п.1, отличающееся тем, что пальцы (23) выполнены с возможностью протягивания частей продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки.
3. Устройство по п.1 или 2, отличающееся тем, что все пальцы (23) нагружены усилием пружины.
4. Устройство по п.1 или 2, отличающееся тем, что все пальцы (23) установлены на общем держателе (27) с возможностью перемещения из положения ожидания в рабочее положение и наоборот, а держатель (27) имеет, по меньшей мере, одну дополнительную степень свободы для осуществления перемещения в поперечном направлении Q.
5. Устройство по п.4, отличающееся тем, что пальцы (23) установлены на держателе (27) с возможностью поворота вокруг оси В, а держатель (27) установлен с возможностью поворота вокруг оси А, которая расположена над плоскостью Е транспортировки продукта (11) и проходит в направлении Т транспортировки.
6. Устройство по п.4, отличающееся тем, что держатель (27) установлен с возможностью поворота вокруг оси С, проходящей вертикально по отношению к плоскости Е транспортировки продукта (11), таким образом, что установленные на держателе (27) пальцы (23) могут переводиться в различные угловые положения относительно направления Т транспортировки.
7. Устройство по п.5 или 6, отличающееся тем, что с пальцами (23) соединен пневматический цилиндр (26) для выполнения поворота вокруг оси В из положения ожидания в рабочее положение и наоборот.
8. Устройство по п.6, отличающееся тем, что с держателем (27) соединен, по меньшей мере, один пневматический цилиндр (30, 31), предпочтительно два пневматических цилиндра (30, 31), для выполнения поворота вокруг оси C, с целью установки пальцев (23) под углом.
9. Устройство по п.1 или 2, отличающееся тем, что средство (20) поперечной подачи содержит шесть пальцев (23).
10. Устройство по п.1 или 2, отличающееся тем, что пальцы (23) могут управляться, по меньшей мере, группами, но предпочтительно индивидуально.
11. Устройство по п.1, отличающееся тем, что, по меньшей мере, один палец (23) предназначен для образования геометрического замыкания с продуктом (11), а, по меньшей мере, один другой палец (23) предназначен для образования силового замыкания с продуктом (11).
12. Устройство по п.11, отличающееся тем, что пальцы (23), предназначенные для образования геометрического замыкания с продуктом (11), имеют форму крюка для введения в разрезы (24) между частями продукта.
13. Устройство по п.11 или 12, отличающееся тем, что пальцы (23), предназначенные для образования силового замыкания с продуктом (11), имеют, по меньшей мере, частично на стороне, обращенной к продукту (11), поверхность, образующую фрикционное замыкание с продуктом (11).
14. Устройство по п.11 или 12, отличающееся тем, что пальцы (23), предназначенные для образования силового замыкания с продуктом (11), короче пальцев (23), предназначенных для образования геометрического замыкания с продуктом (11).
15. Способ отделения частей разрезанного продукта (11), в частности рыбного филе, в частности, с помощью устройства (10) по одному из пп.1-14, отличающийся тем, что он включает следующие операции:
- подачу разрезанного продукта (11), части которого еще находятся вместе, в направлении Т транспортировки с помощью транспортировочного элемента (19),
- определение положения продукта (11) на транспортировочном элементе (19) и регистрацию специфических данных продукта,
- перемещение частей продукта в поперечном направлении Q, перпендикулярном к направлению Т транспортировки, путем введения, по меньшей мере, двух пальцев (23) в разрезы (24) между частями продукта и/или их прилегания к частям продукта и управления пальцами в соответствии с положением продукта (11) и его специфическими данными, с целью перемещения в поперечном направлении Q, и
- удаление отделенных частей продукта.
16. Способ по п.15, отличающийся тем, что части продукта стягивают с транспортировочного элемента (19).
17. Способ по п.16, отличающийся тем, что во время стягивания пальцы (23) поворачивают вокруг вертикальной оси С.
18. Способ по любому из пп.15-17, отличающийся тем, что управляют группами пальцев (23), но предпочтительно пальцами управляют индивидуально.
| ИНЪЕЦИРУЕМЫЙ КОМПОЗИТНЫЙ МАТЕРИАЛ, ПРИГОДНЫЙ ДЛЯ ИСПОЛЬЗОВАНИЯ В КАЧЕСТВЕ ЗАМЕНИТЕЛЯ КОСТНОЙ ТКАНИ | 2006 |
|
RU2407552C2 |
| WO 2007138616 A2, 06.12.2007 | |||
| DE 3710479 A1, 13.10.1988 | |||
| Фильтрующий пористый материал | 1967 |
|
SU239547A1 |
| Устройство для приема и передачи телесигналов | 1975 |
|
SU534778A1 |
| СПОСОБ МЕХАНИЗИРОВАННОГО ПОЛУЧЕНИЯ ФИЛЕЙНОГО МЯСА ИЗ ПЕРЕДНЕЙ ЧАСТИ ТУШКИ ПТИЦЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2073979C1 |

