Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству силовой передачи для гибридного транспортного средства, включающего в себя двигатель внутреннего сгорания и электродвигатель.
Уровень техники
Существует устройство силовой передачи для гибридного транспортного средства, которое позволяет комбинировать движущую силу, выводимую из двигателя внутреннего сгорания, и движущую силу, выводимую из электродвигателя, и передающее комбинированную движущую силу к ведущим колесам, и позволяющее выполнять операции регенерирования в электродвигателе. В качестве подхода такого типа обычно известен способ замедления или ускорения движущей силы, подаваемой с выхода двигателя внутреннего сгорания, и сразу же передачу этой движущей силы на два вала, параллельные выходному валу двигателя внутреннего сгорания, и после этого возврат движущей силы на выходной вал, коаксиальный с выходным валом двигателя внутреннего сгорания.
Например, в трансмиссии, описанной в заявке на японский патент №2002-89594, имеются два вала, параллельные выходному валу двигателя внутреннего сгорания. Каждый из этих двух валов соединен с выходным валом двигателя внутреннего сгорания через сцепление, и электродвигатель соединен с одним концом одного из двух валов (ниже называется "первым валом"). Кроме того, на первом валу расположен синхронизатор, который избирательно соединяет множество зубчатых колес для ступени с четными номерами с первым валом. На другом из двух валов (ниже называется "вторым валом" расположен синхронизатор, который избирательно подключает множество ступеней с нечетными номерами и зубчатые колеса ступеней обратного хода со вторым валом. Зубчатые колеса, закрепленные на выходном валу, зацепляют зубчатыми колесами ступеней с четными номерами и зубчатыми колесами ступени с нечетными номерами совместно.
Сущность изобретения
3адачи, решаемые изобретением
Трансмиссия, описанная в заявке на японский патент №2002-89594, имеет, однако, недостаток, состоящий в том, что длина трансмиссии увеличивается в осевом направлении в соответствии с количеством ступеней, и, поэтому, трудно устанавливать трансмиссию в случае малого пространства для установки трансмиссии в транспортном средстве. В частности, когда двигатель установлен поперечно (длина вала ориентирована в направлении ширины транспортного средства) в компоновке FF транспортного средства, трудно установить трансмиссию.
Учитывая описанное выше, было разработано настоящее изобретение. Поэтому цель настоящего изобретения состоит в обеспечении устройства силовой передачи для гибридного транспортного средства, которое включает в себя двигатель внутреннего сгорания и электродвигатель, устройства силовой передачи, выполненного с возможностью уменьшения его осевой длины.
В настоящем изобретении предусмотрено устройство силовой передачи для гибридного транспортного средства, имеющего двигатель внутреннего сгорания и электродвигатель, устройство силовой передачи, включающее в себя: первый основной входной вал, который расположен параллельно выходному валу двигателя внутреннего сгорания, на который подают движущую силу от двигателя внутреннего сгорания, и который соединяют с выходным валом двигателя внутреннего сгорания путем установки первого устройства включения и выключения в соединенное состояние; второй основной входной вал, который расположен коаксиально с первым основным входным валом и соединен с выходным валом двигателя внутреннего сгорания путем установки второго устройства включения и выключения в соединенное состояние; промежуточный входной вал, расположенный параллельно первому основному входному валу; вспомогательный входной вал, расположенный параллельно промежуточному входному валу; выходной вал, который расположен параллельно первому основному входному валу, и выводит движущую силу в ведомый модуль через обратный вал; группу первых зубчатых колес, которая расположена на первом основном входном валу и состоит из множества зубчатых колес, избирательно соединяемых с выходным валом через первый синхронизатор; группу вторых зубчатых колес, которая расположена на вспомогательном входном валу и состоит из множества зубчатых колес, избирательно соединяющих вспомогательный входной вал с выходным валом через второй синхронизатор; группу третьих зубчатых колес, которая установлена на выходном валу и которая состоит из множества зубчатых колес, совместно зацепленных с зубчатыми колесами группы первых зубчатых колес и зубчатыми колесами группы вторых зубчатых колес; и механизм дифференциального вращения, состоящий из первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента, таким образом, что они вращаются дифференцированно относительно друг друга, в котором: первый вращающийся элемент соединен с первым основным входным валом и электродвигателем; второй вращающийся элемент соединен с группой первых зубчатых колес; третий вращающийся элемент соединен с фиксирующим механизмом, который позволяет устанавливать третий вращающийся элемент в фиксированное состояние; и второй вращающийся элемент замедляет движущую силу, передаваемую из первого вращающегося элемента, используя силу реакции от третьего вращающегося элемента, который помещен в фиксированное состояние с помощью фиксирующего механизма
Первый аспект изобретения
В соответствии с первым аспектом изобретения, с фиксирующим механизмом, работающим так, что он устанавливает третий вращающийся элемент в фиксированное состояние, и первым синхронизатором, работающим так, что он соединяет любое зубчатое колесо группы первых зубчатых колес с выходным/входным валом, первое устройство включения и выключения устанавливают в соединенное состояние, и затем движущую силу двигателя внутреннего сгорания передают на первый вращающийся элемент через первый основной входной вал, и/или движущую силу электродвигателя передают на первый вращающийся элемент. В это время второй вращающийся элемент механизма комбинирования мощности замедляется и выводит движущую силу, которая была передана на первый вращающийся элемент. 3атем движущую силу выводят в ведомый модуль через первый вспомогательный входной вал и выходной вал. Таким образом, в первом аспекте изобретения, транспортное средство выполнено с возможностью начала движения и движения с первым синхронизатором и вторым синхронизатором, установленными в нейтральное состояние. Поэтому, в случае использования одинакового количества пар зубчатых колес переменной скорости, как и в трансмиссии, описанной в Патентном документе 1, устройство силовой передачи имеет еще одну ступень переменной скорости, что обеспечивает возможность уменьшения осевой длины.
Кроме того, в описанном выше состоянии, электродвигатель выполнен с возможностью выполнения регенеративной операции, используя движущую силу, передаваемую от двигателя внутреннего сгорания на первый вращающийся элемент через первый основной входной вал. Таким образом, в первом аспекте изобретения, транспортное средство выполнено с возможностью начала движения и движения с первым синхронизатором и вторым синхронизатором, установленными в нейтральное состояние, в то время как электродвигатель выполняет регенеративную операцию. Поэтому становится возможным установить режим начала движения и движение, отличающийся от режима начала движения и движения, описанного в предыдущем параграфе. Кроме того, электродвигатель выполняет регенеративную операцию в этом режиме, и, поэтому, такой режим является предпочтительным в случае, когда уровень заряда батареи падает и т.п.
Настоящее изобретение обеспечивает устройство силовой передачи для гибридного транспортного средства, имеющего двигатель внутреннего сгорания и электродвигатель, устройство силовой передачи, включающее в себя: основной входной вал, на который движущую силу подают от двигателя внутреннего сгорания; первый вспомогательный входной вал, который расположен параллельно основному входному валу и избирательно соединяется с основным входным валом через пару понижающих зубчатых колес первым устройством включения и выключения; второй вспомогательный входной вал, который расположен параллельно основному входному валу и избирательно соединяется с основным входным валом через пару повышающих скорость зубчатых колес вторым устройством включения и выключения; выходной вал, который расположен коаксиально с основным входным валом и выводит движущую силу в ведомый модуль через обратный вал; группу первых зубчатых колес, которая расположена на первом, вспомогательном входном валу, и состоит из множества зубчатых колес, избирательно соединяющихся с первым, вспомогательным входным валом через первый синхронизатор; группу вторых зубчатых колес, которая расположена на втором вспомогательном входном валу, и состоит из множества зубчатых колес, избирательно соединяющихся со вторым, вспомогательным входным валом через второй синхронизатор; группу третьих зубчатых колес, которая установлена на выходном валу и составлена из множества зубчатых колес, совместно зацепленных с зубчатыми колесами группы первых зубчатых колес и зубчатыми колесами группы вторых зубчатых колес; и механизм дифференциального вращения, состоящий из первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента для дифференцированного вращения относительно друг друга, в котором: один из первого вспомогательного входного вала и второго вспомогательного входного вала соединен с первым вращающимся элементом, и другой выполнен с возможностью передавать движущую силу на выходной вал, не используя механизм дифференциального вращения; первый вращающийся элемент соединен с выходным валом; третий вращающийся элемент соединен с электродвигателем; и второй вращающийся элемент объединяет движущую силу, передаваемую от первого вращающегося элемента, с движущей силой, передаваемой от третьего вращающегося элемента, и передает комбинированную движущую силу на выходной вал,
Второй аспект изобретения
В соответствии со вторым аспектом изобретения, первое устройство включения и выключения или второе устройство включения и выключения установлены в соединенное состояние так, что первый вспомогательный входной вал, или второй вспомогательный входной вал, соединенные с первым вращающимся элементом (ниже вспомогательный входной вал называется "соединенный вспомогательный входной вал"), соединенным с основным входным валом. Кроме того, первый синхронизатор и второй синхронизатор установлены в нейтральное положение, в котором первый вспомогательный входной вал и второй вспомогательный входной вал не соединены с каким-либо зубчатым колесом, при этом движущую силу подают от двигателя внутреннего сгорания к основному входному валу, и электродвигатель выполняет силовую операцию таким образом, что третий вращающийся элемент вращается. В это время второй вращающийся элемент механизма дифференциального вращения объединяет движущую силу, передаваемую от двигателя внутреннего сгорания на первый вращающийся элемент, через соединенный вспомогательный входной вал, при этом движущую силу передают от электродвигателя на третий вращающийся элемент, и передает комбинированную движущую силу на выходной вал, и комбинированную движущую силу выводят в ведомый модуль. Таким образом, во втором аспекте изобретения, транспортное средство может начать движение и двигаться с первым синхронизатором и вторым синхронизатором, установленными в нейтральное положение. Поэтому, в случае, когда имеется такое же количество пар зубчатых колес переменной скорости, как и в трансмиссии, описанной в Патентном документе 1, устройство силовой передачи имеет на одну ступень переменной скорости больше, что, таким образом, обеспечивает возможность уменьшения осевой длины.
Кроме того, в описанном выше состоянии, движущая сила, передаваемая от двигателя внутреннего сгорания на первый вращающийся элемент через соединенный вспомогательный входной вал, также может быть распределена на второй вращающийся элемент и третий вращающийся элемент. В это время движущую силу выводят в ведомый модуль через второй вращающийся элемент, и электродвигатель выполняет регенеративную операцию через третий вращающийся элемент. Таким образом, во втором аспекте изобретения, транспортное средство выполнено с возможностью начала движения и движения с первым синхронизатором и вторым синхронизатором, установленными в нейтральное положение, в то время как электродвигатель выполняет регенеративную операцию. Поэтому становится возможным достичь режима начала движения и движения, отличного от режима начала движения и движения, описанного в предыдущем параграфе. Кроме того, электродвигатель выполняет регенеративную операцию в этом режиме, и поэтому этот режим является предпочтительным в случае, когда уровень заряда батареи падает и т.п.
Кроме того, во втором аспекте изобретения, предпочтительно, основной входной вал расположен параллельно выходному валу двигателя внутреннего сгорания, и движущую силу на него подают от двигателя внутреннего сгорания, и состоит из первого основного входного вала, соединенного с выходным валом двигателя внутреннего сгорания, путем размещения первого устройства включения и выключения в соединенном состоянии, и второго основного входного вала, который расположен коаксиально с первым основным входным валом и соединен с выходным валом двигателя внутреннего сгорания, путем установки второго устройства включения и выключения в соединенном состоянии, и любой один из первого основного входного вала и второго основного входного вала соединен с первым вращающимся элементом, благодаря чему любой один из первого вспомогательного входного вала и второго вспомогательного входного вала соединен с первым вращающимся элементом.
В этом случае, первый основной входной вал и второй основной входной вал, состоящие из основного входного вала, расположены коаксиально друг другу. Поэтому первое устройство включения и выключения и второе устройство включения и выключения выполнены с возможностью их размещения рядом друг с другом, обеспечивая, таким образом, дополнительное уменьшение размеров устройства силовой передачи для гибридного транспортного средства. Кроме того, устройство, которое управляет первым устройством включения и выключения и вторым устройством включения и выключения, можно использовать совместно, обеспечивая, таким образом, возможность уменьшения затрат.
Кроме того, во втором аспекте изобретения, предпочтительно, устройство силовой передачи имеет зубчатый механизм обратной передачи, который избирательно соединяет пару понижающих зубчатых колес и пару повышающих зубчатых колес друг с другом.
В этом случае, первое устройство включения и выключения или второе устройство включения и выключения устанавливают в соединенное состояние так, чтобы соединенный вспомогательный входной вал был соединен с основным входным валом. Кроме того, используя первый синхронизатор и второй синхронизатор, установленные в нейтральное состояние, в которых первый вспомогательный входной вал и второй вспомогательный входной вал не соединены с каким-либо зубчатым колесом, и соединен с механизмом зубчатой передачи обратного хода, движущую силу подают от двигателя внутреннего сгорания на основной входной вал, и эту движущую силу прикладывают от электродвигателя для вращения третьего вращающегося элемента. В это время второй вращающийся элемент механизма дифференциального вращения объединяет движущую силу в направлении обратного вращения, передаваемую от двигателя внутреннего сгорания на первый вращающийся элемент через соединенный вспомогательный входной вал, с движущей силой, передаваемой от электродвигателя на третий вращающийся элемент, и передает комбинированную движущую силу на выходной вал, и комбинированную движущую силу выводят в ведомый модуль. Таким образом, в данном изобретении, транспортное средство может двигаться назад с первым синхронизатором и вторым синхронизатором, установленным в нейтральное состояние. Кроме того, механизм зубчатой передачи обратного хода выполнен с возможностью его установки параллельно основному выходному валу, как описано выше. Это обеспечивает возможность уменьшения осевой длины на ступень обратного хода по сравнению с трансмиссией, описанной в Патентном документе 1.
Кроме того, в описанном выше состоянии, движущая сила, передаваемая от двигателя внутреннего сгорания к первому вращающему элементу через соединенный вспомогательный входной вал, также может быть распределена на второй вращающийся элемент и третий вращающийся элемент. В это время движущую силу выводят в ведомый модуль через второй вращающийся элемент, и электродвигатель выполняют регенеративную операцию через третий вращающийся элемент. Таким образом, в соответствии с настоящим изобретением, транспортное средство выполнено с возможностью движения обратным ходом с первым синхронизатором и вторым синхронизатором, установленными в нейтральное положение, в то время как электродвигатель выполняет регенеративную операцию. Поэтому становится возможным обеспечить режим движения обратным ходом, отличающийся от режима движения обратным ходом, описанного в предыдущем параграфе. Кроме того, электродвигатель выполняет регенеративную операцию в этом режиме, и, поэтому, этот режим является предпочтительным в случае, когда уровень заряда батареи падает и т.п.
Кроме того, в первом и втором аспектах изобретения, предпочтительно, по меньшей мере, один из первого элемента включения и выключения и второго элемента включения и выключения представляет собой сухое сцепление.
Это обеспечивает возможность уменьшения времени "включения и выключения" и уменьшение размера элементов включения и выключения по сравнению со случаем, когда первый элемент включения и выключения и второй элемент включения и выключения представляют собой мокрые сцепления. Удар, вызываемый при изменении движущей силы, генерируемой двигателем во время торможения и т.п., может быть уменьшен в результате управления электродвигателем.
Кроме того, в первом и втором аспектах изобретения, предпочтительно, механизм дифференциального вращения представляет собой модуль планетарной передачи, в котором коаксиально установлены солнечное зубчатое колесо, кольцевое зубчатое колесо и водило, которое поддерживает с возможностью вращения множество планетарных зубчатых колес, зацепленных с солнечным зубчатым колесом и кольцевым зубчатым колесом между солнечным зубчатым колесом и кольцевым зубчатым колесом, как три типа вращающихся элемента типа одиночной шестерни, и первый вращающийся элемент представляет собой солнечное зубчатое колесо, второй вращающийся элемент представляет собой водило, и третий вращающийся элемент представляет собой кольцевое зубчатое колесо.
В этом случае, механизм дифференциального вращения выполнен с возможностью его формирования в простой конфигурации, что, таким образом, обеспечивает возможность уменьшения размеров и снижение затрат. Кроме того, такая конфигурация обеспечивает возможность распределения движущей силы и повышения эффективности передачи.
Кроме того, в первом и втором аспектах изобретения, предпочтительно, зубчатые колеса группы первых зубчатых колес зацепляются с третьей группой зубчатых колес для формирования множества пар зубчатых колес скоростей с нечетными номерами, и зубчатые колеса группы вторых зубчатых колес зацепляются с зубчатыми колесами третьей группы зубчатых колес для формирования множества пар зубчатых колес со скоростями с четными номерами.
В этом случае, состояние, в котором транспортное средство начинает движение и движется с первым синхронизатором и вторым синхронизатором, установленными в нейтральное положение, в состоянии, которое определено как ступень первой скорости.
Кроме того, в первом и втором аспектах изобретения, предпочтительно зубчатые колеса группы первых зубчатых колес зацепляются с зубчатыми колесами третьей группы зубчатых колес для формирования множества пар зубчатых колес со скоростями с нечетными номерами, и зубчатые колеса группы вторых зубчатых колес зацепляются с зубчатыми колесами третьей группы зубчатых колес для формирования множества пар зубчатых колес со скоростями с нечетными номерами.
В этом случае, состояние, в котором транспортное средство начинает движение и движется с первым синхронизатором и вторым синхронизатором, установленными в нейтральное положение, может быть, как эквивалентное ступени с переменной скоростью, которая ниже, чем ступень первой скорости (супер низкая ступень).
Кроме того, в первом и втором аспектах изобретения, предпочтительно, часть или все вращающиеся элементы, неподвижная часть и обмотка якоря, которые составляют электродвигатель, расположены так, что они размещаются над механизмом дифференциального вращения в направлении, перпендикулярном направлению оси выходного вала.
В этом случае, осевая длина устройства силовой передачи может быть уменьшена.
Кроме того, в первом и втором аспектах изобретения, предпочтительно, устройство силовой передачи включает в себя элемент установки запрашиваемой мощности, который устанавливает запрашиваемую мощность, запрашиваемую для выходного вала, и элемент управления, который выполняет операцию двигателя внутреннего сгорания и операцию электродвигателя в соответствии с запрашиваемой мощностью, установленной элементом установки запрашиваемой мощности.
В этом случае, элемент управления обеспечивает возможность предпочтительного выполнения работы двигателя внутреннего сгорания и электродвигателя, и вывод запрашиваемой мощности с выходного вала.
Кроме того, в первом и втором аспектах изобретения, предпочтительно, элемент управления управляет операцией электродвигателя так, что двигатель внутреннего сгорания выполняет операцию в пределах диапазона от области, где двигатель глохнет до области максимальной области вращения.
В этом случае, двигатель внутреннего сгорания выполняет операцию только в пределах диапазона от области, где двигатель глохнет, до области максимальной скорости вращения, и, поэтому, двигатель внутреннего сгорания может быть выполнен с возможностью его предпочтительного использования, обеспечивая, таким образом, предпочтительный уровень потребления топлива, срок службы и т.п. двигателя внутреннего сгорания.
Кроме того, в первом и втором аспектах изобретения, предпочтительно элемент управления выполняет операцию двигателя внутреннего сгорания в пределах соответствующей рабочей области двигателя внутреннего сгорания, и элемент управления сравнивает движущую силу двигателя внутреннего сгорания, передаваемую от первого вращающегося элемента на второй вращающийся элемент, с запрашиваемой мощностью, и управляет электродвигателем для выполнения силовой операции, в случае, когда движущая сила двигателя внутреннего сгорания меньше, чем запрашиваемая мощность, и для выполнения регенеративной операции в случае, когда движущая сила двигателя внутреннего сгорания превышает запрашиваемую мощность.
В этом случае, двигатель внутреннего сгорания выполняет операцию в пределах соответствующей рабочей области, и, поэтому, двигатель внутреннего сгорания выполнен с возможностью его предпочтительного использования, делая, таким образом, потребление топлива, срок службы и т.п. двигателя внутреннего сгорания предпочтительными. Кроме того, электродвигатель выполняет силовую операцию или регенеративную операцию, в соответствии с тем, является ли разность между движущей силой двигателя внутреннего сгорания и запрашиваемой мощностью положительной или отрицательной, в результате чего запрашиваемая мощность всегда может быть выведена с выходного вала.
Кроме того, в первом и втором аспектах изобретения, предпочтительно элемент управления управляет электродвигателем для выполнения операции при номинальном выходе или максимальной частоте оборотов в минуту в случае, когда электродвигатель выполняет операцию при величине выхода или частоте оборотов в минуту, превышающих номинальное значение выхода или максимальное количество оборотов в минуту.
В этом случае, электродвигатель выполняет операцию при значении выхода или частоте оборотов в минуту, равным или меньших, чем номинальное значение выхода и максимальная частота оборотов в минуту. Поэтому электродвигатель можно предпочтительно использовать, обеспечивая, таким образом, хороший срок службы электродвигателя.
Краткое описание чертежей
На фиг.1 показана схема, иллюстрирующая общую конфигурацию транспортного средства, имеющего устройство силовой передачи для гибридного транспортного средства в соответствии с первым вариантом осуществления настоящего изобретения;
на фиг.2 показана схема, иллюстрирующая взаимосвязь положений между валами устройства силовой передачи;
на фиг.3 показана таблица, иллюстрирующая рабочие состояния соответствующих участков на ступенях переменной скорости в режиме работы от двигателя устройства силовой передачи;
на фиг.4 показана коллинеарная схема для описания работы механизма объединения мощности;
на фиг.5 показана схема, иллюстрирующая общую конфигурацию транспортного средства, имеющего устройство силовой передачи, для гибридного транспортного средства в соответствии со вторым вариантом осуществления настоящего изобретения;
на фиг.6 показана таблица, иллюстрирующая состояния работы соответствующих участков на ступенях переменной скорости в режиме работы от двигателя устройства силовой передачи;
на фиг.7 показана схема, иллюстрирующая общую конфигурацию транспортного средства, имеющего устройство силовой передачи для гибридного транспортного средства в соответствии с третьим вариантом осуществления настоящего изобретения;
на фиг.8 показана схема, иллюстрирующая взаимосвязь положений между валами устройства силовой передачи;
на фиг.9 показана схема, иллюстрирующая состояние работы на первой ступени скорости устройства силовой передачи:
на фиг.10 показана коллинеарная схема для описания работы механизма объединения мощности;
на фиг.11 показана схема, иллюстрирующая состояние работы на ступени обратной передачи устройства силовой передачи;
на фиг.12 показана схема, иллюстрирующая состояние работы на ступени второй скорости в режиме работы от двигателя устройства силовой передачи;
на фиг.13 показана схема, иллюстрирующая состояние работы на ступени второй скорости в режиме движения с помощью устройства силовой передачи;
на фиг.14 показана схема, иллюстрирующая состояние работы на ступени второй скорости при подготовке к ступени третьей скорости в режиме движения с помощью устройства силовой передачи;
на фиг.15 показана схема, иллюстрирующая состояние работы на ступени третьей скорости при подготовке к ступени второй скорости в режиме движения с помощью устройства силовой передачи;
на фиг.16 показана схема, иллюстрирующая состояние работы на ступени третьей скорости в режиме движения с помощью устройства силовой передачи;
на фиг.17 показана схема, иллюстрирующая состояние работы на ступени четвертой скорости в режиме работы от двигателя устройства силовой передачи;
на фиг.18 показана схема, иллюстрирующая состояние работы на ступени четвертой скорости при подготовке к ступени третьей скорости в режиме движения с помощью устройства силовой передачи;
на фиг.19 показана схема, иллюстрирующая состояние работы на ступени четвертой скорости в режиме движения с помощью устройства силовой передачи;
на фиг.20 показана схема, иллюстрирующая состояние работы на ступени четвертой скорости при подготовке к ступени пятой скорости в режиме движения с помощью устройства силовой передачи;
на фиг.21 показана схема, иллюстрирующая состояние работы на ступени пятой скорости при подготовке к ступени четвертой скорости в режиме движения с помощью устройства силовой передачи;
на фиг.22 показана схема, иллюстрирующая состояние работы на ступени пятой скорости в режиме движения с помощью устройства силовой передачи;
на фиг.23 показана схема, иллюстрирующая состояние работы на ступени третьей скорости в режиме движения EV устройства силовой передачи;
на фиг.24 показана схема, иллюстрирующая состояние работы на ступени пятой скорости в режиме движения EV устройства силовой передачи;
на фиг.25 показана схема, иллюстрирующая общую конфигурацию транспортного средства, имеющего устройство силовой передачи для гибридного транспортного средства в соответствии с четвертым вариантом осуществления настоящего изобретения; и
на фиг.26 показана схема, иллюстрирующая общую конфигурацию транспортного средства, имеющего устройство силовой передачи для гибридного транспортного средства в соответствии с пятым вариантом осуществления настоящего изобретения.
Подробное описание изобретения
Первый вариант осуществления
Устройство 1 силовой передачи для гибридного транспортного средства в соответствии с первым вариантом осуществления, в соответствии с настоящим изобретением, будет описано ниже со ссылкой на приложенные чертежи.
Вначале будет описана конфигурация устройства 1 силовой передачи со ссылкой на фиг.1. Устройство 1 силовой передачи представляет собой автоматизированную ручную трансмиссию с двойным сцеплением (DCT), которая установлена в гибридном транспортном средстве и включает в себя двигатель (двигатель внутреннего сгорания) 2 и электродвигатель (двигатель-генератор) 3, как источники генерирования электроэнергии. Кроме того, устройство 1 силовой передачи выполнено с возможностью передачи движущей силы (движущей силы) двигателя 2 или/и электродвигателя 3 на пару ведущих колес 4 и 4, которые представляют собой ведомые модули, для привода ведущих колес 4 и 4. Кроме того, устройство 1 силовой передачи выполнено с возможностью передачи движущей силы двигателя 2 или/и электродвигателя 3 не только на ведущие колеса 4 и 4, но также и на вспомогательное устройство 5, которое установлено на транспортном средстве, для привода вспомогательного устройства 5. Вспомогательное устройство 5 представляет собой, например, компрессор кондиционера воздуха, водяной насос, масляный насос и т.п.
Двигатель 2 представляет собой двигатель внутреннего сгорания, который генерирует движущую силу (крутящий момент), в результате сжигания топлива, такого как бензин, дизельное топливо или спирт, и имеет выходной вал 2а для использования при выводе генерируемой движущей силы наружу. Таким же образом, как в нормальном автомобильном двигателе, двигатель 2 регулирует движущую силу, которую выводят из двигателя 2 через выходной вал 2а, управляя степенью открытия клапана дроссельной заслонки, предусмотренной во впускном канале, который не показан (управляя количеством всасываемого воздуха в двигатель 2).
Электродвигатель 3 представляет собой трехфазный бесщеточный электродвигатель постоянного тока в данном варианте осуществления и включает в себя полый ротор (вращающееся тело) 3а, который установлен с возможностью вращения внутри корпуса (не показан) электродвигателя 3, и статор (неподвижная часть) 3b, который закреплен на корпусе вокруг ротора 3а. В роторе 3а предусмотрено множеством постоянных магнитов, закрепленных на нем, и на статоре 3b предусмотрена трехфазная обмотка (обмотка якоря) 3ba, закрепленная на нем. Статор 3b электродвигателя 3 предусмотрен неподвижно относительно корпуса, который предусмотрен на неподвижной части, которая является стационарной относительно корпуса транспортного средства, такого как внешний кожух устройства 1 силовой передачи.
Катушка 3ba электродвигателя 3 электрически соединена с батареей (аккумуляторной батареей) 7, используемой в качестве источника энергии постоянного тока, через модуль 6 управления мощностью (ниже называется "PDU"), который представляет собой схему управления, включающую в себя схему обратного преобразователя. Кроме того, PDU 6 электрически соединен с модулем 8 электронного управления (ниже называется "ECU").
ECU 8 электрически соединен с двигателем 2 и т.п., хотя это не представлено, в дополнение к PDU 6 и управляет работой устройства 1 силовой передачи, включая в себя двигатель 2. ECU 8 функционирует, как элемент установки запрашиваемой мощности, который устанавливает движущую силу, требуемую для передачи на ведущие колеса 4 и 4, на основе скорости транспортного средства или количества оборотов в минуту (rpm) двигателя 2, функционирует, как элемент управления, который управляет двигателем 2 или электродвигателем 3, в соответствии с запрашиваемой мощностью, установленной элементом установки запрашиваемой мощности.
ECU 8 управляет электрическим током, который протекает через катушку 3ba, через PDU 6, регулируя, таким образом, движущую силу (крутящий момент), которую электродвигатель 3 выводит с ротора 3а. В этом случае, электродвигатель 3 выполняет силовую операцию для генерирования крутящего момента мощности в роторе 3а, используя электроэнергию, подаваемую от батареи 7 для функционирования в качестве электродвигателя под управлением PDU 6. В частности, электроэнергия, подаваемая на статор 3b, преобразуется в движущую силу и выводится на ротор 3а. Кроме того, под управлением PDU 6 электродвигатель 3 генерирует электричество из энергии вращения, подаваемой снаружи в ротор 3а, и выполняет регенеративную операцию для генерирования регенеративного крутящего момента в роторе 3а, при подаче электроэнергии в батарею 7, для функционирования как генератор. В частности, движущая сила, подаваемая в ротор 3а, преобразуется в электроэнергию в статоре 3b.
ECU 8 представляет собой модуль электронной схемы, включающий в себя CPU, RAM, ROM, схему интерфейса и т.п., и управляет работой устройства 1 силовой передачи, выполняя обработку управления, которая определена заранее установленной программой. В этом случае функции, воплощенные обработкой управления ECU 8, включают в себя функцию управления работой электродвигателя 3 через PDU 6, функцию управления работой двигателя 2 через элемент управления для управления двигателем, такой как элемент управления клапаном дроссельной заслонки, который не показан, и функцию управления работой муфт первого сцепления С1, второго сцепления С2, сцепления 33 вспомогательного устройства, первого синхронизатора S1, второго синхронизатора S2 и обратного синхронизатора SR, описанных ниже, через элементы управления или схемы управления, которые не показаны.
Устройство 1 силовой передачи включает в себя механизм 9 дифференциального вращения, состоящий из вращающихся элементов, выполненных с возможностью дифференцированного вращения относительно друг друга. В данном варианте осуществления используется модуль планетарной передачи в качестве механизма 9 дифференциального вращения.
Выходной вал 2а двигателя 2 соединен с двумя основными входными валами, а именно первым основным входным валом 11 и вторым основным входным валом 12, которые избирательно принимают вход, состоящий из движущей силы, от двигателя 2, и они расположены коаксиально друг с другом. Первый основной входной вал 11 продолжается со стороны двигателя 2 к стороне электродвигателя 3, и второй основной входной вал 12, сформированный, как полая структура, установлен с возможностью вращения с внешней стороны первого основного входного вала 11 на стороне двигателе 2. Первый основной входной вал 11 соединяется или отсоединяется с или от выходного вала 2а двигателя 2 с помощью первого сцепления (первое устройство включения и выключения) С1. Второй основной входной вал 12 соединяется или отсоединяется с или от выходного вала 2а двигателя 2 с помощью второго сцепления (второе устройство включения и выключения) С2.
Первое сцепление С1 представляет собой механизм сцепления, работающий таким образом, что выходной вал 2а двигателя 2 работает так, что он может соединяться или отсоединяться с или от первого основного входного вала 11 (механизм сцепления, избирательно управляемый между соединенным состоянием и разъединенным состоянием) под управлением ECU 8. Второе сцепление С2 представляет собой механизм сцепления, работающий таким образом, что выходной вал 2а двигателя 2 работает так, что он соединяется или отсоединяется с или от второго основного входного вала 12 под управлением ECU 8.
Установка первого сцепления С1 в соединенное состояние обеспечивает только передачу мощности с выходного вала 2а на первый основной входной вал 11 и разъединяет передачу мощности от выходного вала 2а на второй основной входной вал 12. Кроме того, установка второго сцепления С2 в соединенное состояние обеспечивает только передачу мощности с выходного вала 2а на второй основной входной вал 12 и отсоединяет передачу мощности с выходного вала 2а на первый основной входной вал 11. Следует отметить что, как первое сцепление С1, так и второе сцепление С2 не установлены в соединенное состояние, но только одно из первого сцепления С1 и второго сцепления С2 выполнено с возможностью его избирательной установки в соединенное состояние.
Кроме того, эти сцепления С1 и С2 предпочтительно представляют собой сухие сцепления. В этом случае, сухие сцепления С1 и С2 обеспечивают уменьшение времени "включения и выключения" и уменьшение размера элемента включения и выключения по сравнению со случаем, когда сцепления С1 и С2 представляют собой мокрые сцепления. Кроме того, удар, вызываемый изменением движущей силы, генерируемой при торможении двигателя и т.п., может быть подавлен в результате управления электродвигателем 3.
Вспомогательный входной вал 13 расположен параллельно основным входным валам 11 и 12. Кроме того, второй основной входной вал 12 и вспомогательный входной вал 13 соответствуют промежуточным входным валам, в соответствии с настоящим изобретением, и всегда соединены друг с другом через промежуточный вал 14, расположенный параллельно первому основному входному валу 11 (см. фиг.2).
В частности, зубчатое колесо 12а, установленное на втором основном входному валу 12, зацепляется с зубчатым колесом 14а, которое установлено на промежуточном валу 14, в результате чего формируется пара зубчатых колес 15. Движущая сила, передаваемая на второй основной входной вал 12, передается на промежуточный вал 14 через пару зубчатых колес 15. Кроме того, зубчатое колесо 14а зацепляется с зубчатым колесом 13а, которое установлено на вспомогательном входном валу 13, в результате чего формируется пара зубчатых колес 16. Движущая сила, передаваемая на промежуточный вал 14, передается на вспомогательный входной вал 13 через пару зубчатых колес 16. Оба конца вспомогательного входного вала 13 установлены с возможностью вращения на подшипниках вала, которые не представлены. Промежуточный вал 14 поддерживается с возможностью вращения во время холостого хода относительно неподвижных частей, таких как корпус, который не показан.
Кроме того, выходной вал 17 расположен параллельно первому основному входному валу 11 и вспомогательному входному валу 13. Оба конца выходного вала 17 установлены с возможностью вращения на подшипниках вала, которые не показаны.
На первом основном входном валу 11 предусмотрена группа первых зубчатых колес, которая состоит из множества зубчатых колес 18а и 18b, избирательно соединяемых с выходным валом 17 через первый синхронизатор (механизм синхрозацепления) S1.
Первый синхронизатор S1 хорошо известен, и приводной элемент, и вилка переключения, которые не показаны, перемещают муфту в осевом направлении первого основного входного вала 11, таким образом, избирательно соединяя зубчатое колесо 18а третьей скорости или зубчатое колесо 18b пятой скорости с первым основным входным валом 11. Если муфта перемещается из представленного нейтрального положения в левую сторону, зубчатое колесо 18а третьей скорости соединяется с первым основным входным валом 11 (ниже это состояние называется как "установленное состояние ступени третьей скорости"). С другой стороны, если муфта перемещается из нейтрального положения в правую сторону, зубчатое колесо 18b пятой скорости соединяется с первым основным входным валом 11 (ниже это состояние называется как "установленное состояние ступени пятой скорости"). Когда муфта находится в нейтральном положении, оба из зубчатого колеса 18а третьей скорости и зубчатого колеса 18b пятой скорости отсоединены от первого основного входного вала 11 (ниже это состояние называется как "нейтральное состояние"). На вспомогательном входном валу 13 предусмотрена группа вторых зубчатых колес, которая составлена из множества зубчатых колес 19а и 19b, избирательно соединяющих вспомогательный входной вал 13 с выходным валом 17 через второй синхронизатор (механизм синхрозацепления) S2.
Второй синхронизатор S2 хорошо известен, и приводной элемент, и вилка переключения, которые не показаны, перемещают муфту в осевом направлении вспомогательного входного вала 13, таким образом, избирательно соединяя зубчатое колесо 19а второй скорости или зубчатое колесо 19b четвертой скорости со вспомогательным входным валом 13. Если муфта перемещается из представленного нейтрального положения в левую сторону, зубчатое колесо 19а второй скорости соединяется со вспомогательным входным валом 13 (ниже это состояние называется как "установленное состояние ступени второй скорости"). С другой стороны, если муфта перемещается из представленного нейтрального положения в правую сторону, зубчатое колесо 19b четвертой скорости соединяется со вспомогательным входным валом 13 (ниже это состояние называется как "установленное состояние ступени четвертой скорости"). Когда муфта находится в нейтральном положении, оба из зубчатого колеса 19а второй скорости и зубчатого колеса 19b четвертой скорости отсоединены от вспомогательного входного вала 13 (ниже это состояние называется, как "нейтральное состояние").
Зубчатое колесо 18а третьей скорости зацепляется с зубчатым колесом 17а малой скорости, установленным на выходном валу 17, в результате чего формируется пара 20 зубчатых колес третьей скорости. Кроме того, зубчатое колесо 18b пятой скорости зацепляется с зубчатым колесом 17b высокой скорости, установленным на выходном валу 17, в результате чего формируется пара 21 зубчатых колес пятой скорости.
Зубчатое колесо 19а второй скорости зацепляется с зубчатым колесом 17а малой скорости, установленным на выходном валу 17, в результате чего формируется пара 22 зубчатых колес второй скорости. Кроме того, зубчатое колесо 19b четвертой скорости зацепляется с зубчатым колесом 17b высокой скорости, установленным на выходном валу 17, в результате чего формируется пара 23 зубчатых колес четвертой скорости. В этом варианте осуществления зубчатое колесо 17а малой скорости и зубчатое колесо 17b высокой скорости соответствуют группе третьих зубчатых колес в соответствии с настоящим изобретением.
Кроме того, вал 24 обратного хода расположен параллельно первому основному входному валу 11. Кроме того, промежуточный вал 25 обратного хода расположен коаксиально с валом 24 обратного хода. В этом варианте осуществления промежуточный вал 25 обратного хода, который сформирован в полости, предусмотрен с возможностью вращения за пределами вала 24 обратного хода. Оба конца вала 24 обратного хода установлены с возможностью вращения на подшипниках вала, которые не показаны.
Кроме того, вал 24 обратного хода и промежуточный вал 25 обратного хода соединены друг с другом через синхронизатор (механизм синхрозацепления) SR обратного хода. SR синхронизатор обратного хода хорошо известен, и приводной элемент, и вилка переключения, которые не показаны, перемещают муфту в осевом направлении промежуточного вала 25 обратного хода, таким образом избирательно соединяя зубчатое колесо 25а обратного хода с валом 24 обратного хода (ниже это состояние называется как "установленное состояние ступени движения обратным ходом"). Если муфта перемещается из представленного нейтрального положения в правую сторону, зубчатое колесо 25а обратного хода соединяется с валом 24 обратного хода. Когда муфта находится в нейтральном положении, зубчатое колесо 25а обратного хода отсоединено от вала 24 обратного хода (ниже это состояние называется "нейтральным состоянием").
Первый основной входной вал 11 соединен с промежуточным валом 25 обратного хода через пару зубчатых колес 26 обратного хода. Пара зубчатых колес 26 обратного хода состоит из зубчатого колеса 11а, которое закреплено на первом основном входном валу 11, и зубчатого колеса 25b, которое закреплено на промежуточном валу 25 обратного хода, которые зацепляются друг с другом. Кроме того, вал 24 обратного хода может соединяться с промежуточным валом 14 через пару зубчатых колес 27 обратного хода. Пара зубчатых колес 27 обратного хода состоит из зубчатого колеса 24а, закрепленного на валу 24 обратного хода, и зубчатого колеса 14а, закрепленного на промежуточном валу 14, которые зацепляются друг с другом.
Обратный вал 28 расположен параллельно первому основному входному валу 11 и, кроме того, выходному валу 17. Кроме того, выходной вал 17 соединен с обратным валом 28 через пару обратных зубчатых колес 29 (см. фиг.2). Пара обратных зубчатых колес 29 состоит из зубчатого колеса 17с, установленного на выходном валу 17, и зубчатого колеса 28а, закрепленного на обратном валу 28, которые зацепляются друг с другом.
Обратный вал 28 соединен с ведущими колесами 4 и 4 через модуль 30 дифференциальной зубчатой передачи, расположенный между ведущими колесами 4 и 4. Модуль 30 дифференциальной зубчатой передачи включает в себя кожух 30а зубчатой передачи, содержащий боковые зубчатые колеса, которые не показаны, соединенные с ведущими колесами 4 и 4 через оси 31 и 31, соответственно, и зубчатое колесо 30b, установленное по внешнему контуру кожуха 30а зубчатой передачи. Кроме того, зубчатое колесо 24b, установленное на противоположном валу 28, зацеплено с зубчатым колесом 30b модуля 30 дифференциальной зубчатой передачи.
Таким образом, обратный вал 28 соединен с ведущими колесами 4 и 4 через модуль 30 дифференциальной зубчатой передачи для вращения, в результате взаимного соединения с ведущими колесами 4 и 4. Кроме того, зубчатое колесо 17d для парковки зацепляется с зубчатым колесом механизма парковки, которое не показано, и также закреплено на выходном валу 17. Оба конца обратного вала 28 установлены с возможностью вращения на подшипниках вала, которые не показаны.
Механизм 9 дифференциального вращения предусмотрен внутри электродвигателя 3. Часть или весь из ротора 3а, статора 3b и обмотки 3ba, составляющих электродвигатель 3, расположены так, что они накладываются поверх механизма 9 дифференциального вращения в направлении, перпендикулярном направлению оси первого основного входного вала 11 (в направлении вдоль внешней окружности), обеспечивая, таким образом, предпочтительное уменьшение размера устройства 1 силовой передачи.
Механизм 9 дифференциального вращения состоит из дифференциального устройства, выполненного с возможностью вращения первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента дифференциально относительно друг друга. Дифференциальное устройство, составляющее механизм 9 дифференциального вращения, представляет собой модуль планетарной передачи типа с одной шестеренкой в данном варианте осуществления и коаксиально содержит три вращающихся элемента, солнечное зубчатое колесо (первый вращающийся элемент) 9s, кольцевое зубчатое колесо (третий вращающийся элемент) 9r и водило (второй вращающийся элемент) 9с, которые поддерживают с возможностью вращения множество планетарных зубчатых колес 9p, зацепленных с кольцевым зубчатым колесом 9r и солнечным зубчатым колесом 9s между солнечным зубчатым колесом 9s и кольцевым зубчатым колесом 9r. Эти три вращающихся элемента 9s, 9r и 9c выполнены с возможностью передавать движущую силу, как известно, между собой и вращаются, при поддержании взаимосвязи между количеством оборотов в минуту (скоростью вращения) вращающихся элементов в определенной коллинеарной взаимосвязи.
Солнечное зубчатое колесо 9s установлено на одном конце первого основного входного вала 11 на стороне электродвигателя 3 и соединено с первым основным входным валом 11, так что оно вращается в результате взаимного блокирования с первым основным входным валом 11. Кроме того, солнечное зубчатое колесо 9s установлено на роторе 3а, на противоположной стороне двигателя 2. Таким образом, солнечное зубчатое колесо 9s, первый основной входной вал 11 и ротор 3а вращаются, в результате взаимного блокирования друг с другом.
Кольцевое зубчатое колесо 9r соединено с внутренней частью ротора 3а, с возможностью вращения путем взаимного блокирования с ротором 3а электродвигателя 3. Кроме того, кольцевое зубчатое колесо 9r выполнено с возможностью переключения между фиксированным состоянием и нефиксированным состоянием с кожухом 31, который представляет собой неподвижную часть, с использованием синхронизатора кольцевого зубчатого колеса (механизм синхрозацепления) SL.
Синхронизатор SL кольцевого зубчатого колеса хорошо известен, и приводной элемент, и вилка переключения, которые не показаны, перемещают муфту в направлении оси вращения кольцевого зубчатого колеса 9r, избирательно соединяя, таким образом, кольцевое зубчатое колесо 9r с корпусом 31. Если муфта перемещается от представленного нейтрального положения на правую сторону, кольцевое зубчатое колесо 9r помещается в фиксированном состоянии. Когда муфта находится в нейтральном положении, кольцевое зубчатое колесо 9r помещается в незафиксированном состоянии (ниже это состояние называется "нейтральным состоянием").
Водило 9с установлено на одном конце зубчатого колеса 18а третьей скорости на стороне электродвигателя 3 и соединено с зубчатым колесом 18а третьей скорости, с возможностью вращения, путем взаимного блокирования с зубчатым колесом 18а третьей скорости.
Кроме того, входной вал 5а вспомогательного устройства 5 расположен параллельно промежуточному валу 25 обратного хода. Кроме того, промежуточный вал 25 обратного хода соединен с входным валом 5а вспомогательного устройства 5 через ременный механизм 32. Ременный механизм 32 состоит из зубчатого колеса 25с, установленного на промежуточном валу 25 обратного хода и зубчатого колеса 5b, установленного на входном валу 5а, которые соединены друг с другом через ремень 32а. Сцепление 33 вспомогательного устройства вставлено относительно входного вала 5а вспомогательного устройства 5, и зубчатое колесо 5b, и входной вал 5а вспомогательного устройства 5 коаксиально соединяются друг с другом через сцепление 33 вспомогательного устройства.
Сцепление 33 вспомогательного устройства работает таким образом, чтобы выполнять отключение соединения между зубчатым колесом 5b и входным валом 5а вспомогательного устройства 5 во время управления ECU 8. Если сцепление 33 вспомогательного устройства установлено в соединенное состояние, зубчатое колесо 5b и входной вал 5а вспомогательного устройства 5 соединены друг с другом через сцепление 33 вспомогательного устройства так, что они вращаются, как единое целое друг с другом. Кроме того, если сцепление 33 вспомогательного устройства установлено в разъединенное состояние, соединение между зубчатым колесом 5b и входным валом 5а вспомогательного устройства 5, выполненное из сцепления 33 вспомогательного устройства, разъединяется. В этом состоянии передача мощности от первого основного входного вала 11 на входной вал 5а вспомогательного устройства 5 через промежуточный вал 25 обратного хода прерывается.
В данном варианте осуществления основные рабочие режимы устройства 1 силовой передачи включают в себя режим работы двигателя, при котором транспортное средство движется только от двигателя 2, в качестве источника генерирования электроэнергии транспортного средства, режим работы EV, в котором транспортное средство движется только от электродвигателя 3, в качестве источника генерирования электроэнергии транспортного средства, и режим работы HEV, в котором транспортное средство движется, как с приводом от двигателя 2, так и от электродвигателя 3. Режим работы HEV включает в себя режим движения с помощью, при котором транспортное средство движется от выхода электродвигателя 3, который добавляют к выходу двигателя 2 и регенеративный режим движения, при котором транспортное средство движется так, что выход двигателя 2 поступает на электродвигатель 3, в то время как электродвигатель 3 выполняет регенеративную операцию. В режиме регенеративного движения происходит заряд батареи 7 в результате регенеративной работы электродвигателя 3. В режиме движения EV электродвигатель 3 выводит движущую силу, потребляя электроэнергию, накопленную в батарее 7.
Затем, в данном варианте осуществления, ECU 8 устанавливает запрашиваемую энергию (запрашиваемую движущую силу) транспортного средства, используя заданную карту и т.п., на основе манипулируемой переменной акселератора, скорости транспортного средства и т.п. транспортного средства, и выбирает каждый режим движения и ступень переменной скорости в соответствии с запрашиваемой мощностью. Кроме того, ECU 8 управляет устройством 1 силовой передачи в соответствии с выбранным режимом движения, ступенью переменной скорости и т.п.
Например, ECU 8 выбирает режим движения с помощью, если выход движущей силы от двигателя 2, когда двигатель 2 работает в соответствующей рабочей области, такой как, например, область, в которой происходит предпочтительное потребление топлива (ниже движущая сила называется "соответствующей рабочей мощностью") меньше, чем запрашиваемая мощность. В этом случае, ECU 8 управляет батареей 7 для подачи движущей силы, для смещения недостатка по сравнению с запрашиваемой мощностью. Если, однако, существует потребность в работе электродвигателя 3 на выходе или скорость превышает номинальную скорость или максимальное количество об/мин, для устранения недостатка, электродвигатель 3 запускают на номинальном выходном уровне или максимальном количестве об/мин, и выход двигателя 2 увеличивается.
Кроме того, когда соответствующая рабочая мощность превышает запрашиваемую мощность, ECU 8 выбирает режим регенеративного движения для заряда батареи 7 с дифференциальной движущей силой (энергией), получаемой путем уменьшения потерь при передаче, вызванной зубчатыми колесами и т.п. от соответствующей рабочей мощности. Также, когда уровень заряда (SOC) батареи 7 низкий, ECU 8 выбирает режим регенеративного движения для заряда батареи 7 и увеличивает выход от двигателя 2.
Далее ступени с переменной скоростью устройства 1 силовой передачи в соответствии с данным вариантом осуществления будут описаны со ссылкой на фиг.1-3. Как описано выше, устройство 1 силовой передачи в соответствии с данным вариантом осуществления выполнено с возможностью изменения скорости вращения входного вала во множестве ступеней через соответствующие пары зубчатых колес на множестве ступеней с переменной скоростью, имеющих разные передаточные числа трансмиссии, и затем выводит движущую силу в выходной вал 17. Другими словами, устройство 1 силовой передачи в соответствии с данным вариантом осуществления имеет ступенчатую трансмиссию. Устройство 1 силовой передачи обеспечивает ступени с переменной скоростью с пятью ступенями движения вперед и одной ступенью движения назад. В устройстве 1 силовой передачи определено, что более высокие ступени переменной скорости имеют более низкое передаточное число трансмиссии.
При запуске двигателя первое сцепление С1 устанавливают в соединенное состояние и выполняют привод электродвигателя 3 для запуска двигателя 2. Другими словами, электродвигатель 3 также используется, как стартер.
Ступень первой скорости
Ступень первой скорости (ступень псевдопервой скорости) установлена путем размещения кольцевого зубчатого колеса 9r в корпусе 31 в соединенном состоянии (фиксированном состоянии), используя синхронизатор SL кольцевого зубчатого колеса и помещая первый синхронизатор S1, второй синхронизатор S2 и синхронизатор SR обратного хода в нейтральное состояние. Ступень первой скорости соответствует ступени переменной скорости, которая имеет передаточное число ниже, чем у ступени второй скорости, которая описана ниже. Если транспортное средство работает от двигателя 2, второе сцепление С2 устанавливают в разъединенное состояние (ниже называется состоянием "выключено"), и первое сцепление С1 устанавливают в соединенное состояние (ниже называется состоянием "включено").
Таким образом, выход движущей силы от двигателя 2 передают на солнечное зубчатое колесо 9s, и солнечное зубчатое колесо 9s вращается в прямом направлении (количество об/мин Ne). Поскольку кольцевое зубчатое колесо 9r установлено в фиксированном состоянии, водило 9с вращается в прямом направлении, как показано на фиг.4. В это время вращение (количество об/мин Nc) водила 9c замедляется относительно вращения солнечного зубчатого колеса 9s, из-за силы реакции кольцевого зубчатого колеса 9r. Затем движущую силу, выводимую из двигателя 2, передают на ведущие колеса 4 и 4, которые проходят через первый основной входной вал 11, солнечное зубчатое колесо 9s и водило 9с, и после этого через пару 20 зубчатых колес третьей скорости, выходного вала 17 и т.п., в результате чего устанавливается ступень первой скорости. Поэтому, если устройство силовой передачи имеет такое же количество пар зубчатой передачи с переменной скоростью трансмиссии, как описано в Патентном документе 1, устройство силовой передачи имеет на одну больше ступеней переменной скорости, обеспечивая, таким образом, возможность уменьшения длины вдоль оси. На фиг.4 показана коллинеарная схема с направлением вперед и обратным направлением, представленными, как "+" и "-", соответственно.
Привод в движение электродвигателя 3 в дополнение к двигателю 2 обеспечивает движение с помощью от электродвигателя 3 на ступени первой скорости (работе от движущей силы двигателя 2 с помощью от электродвигателя 3). В этом случае движущая сила, выводимая от электродвигателя 3, передается на ведущие колеса 4 и 4 через солнечное зубчатое колесо 9s, водило 9с, пару 20 зубчатых колес третьей скорости, выходной вал 17 и т.п. Кроме того, установка первого сцепления С1 в состояние "выключено" обеспечивает движение в режиме EV, при котором транспортное средство движется только от электродвигателя 3.
Кроме того, во время регенеративной операции замедления становится возможным заряжать батарею 7 через PDU 6, в результате торможения электродвигателем 3, переводя транспортное средство в состояние замедления и обеспечивая генерирование электродвигателем 3 электричества.
Кроме того, если ECU 8 определяет, что переключение вверх на ступень второй скорости ожидается в соответствии с состоянием движения транспортного средства во время движения на ступени первой скорости, в результате движения двигателя 2 с первым сцеплением С1 в состоянии "включено" и вторым сцеплением С2 в состоянии "выключено", второй синхронизатор S2 помещен в состояние установленной ступени второй скорости или в состояние предварительного переключения, в котором второй синхронизатор S2 переводят близко в состояние установленной ступени второй скорости. Это обеспечивает достижение состояния ступени первой скорости при подготовке к состоянию ступени второй скорости, в котором возможно выполнение переключения с повышением передачи, выполняемое со ступени первой скорости на ступень второй скорости.
Ступень второй скорости
Ступень второй скорости установлена путем помещения второго синхронизатора S2 в состояние установленной ступени второй скорости и помещение первого синхронизатора S1, синхронизатора SL кольцевого зубчатого колеса и синхронизатора SR обратного хода в нейтральное состояние. Если транспортное средство движется от двигателя 2, второе сцепление С2 установлено в состояние "включено". В состоянии второй скорости движущая сила, выводимая из двигателя 2, передается на ведущие колеса 4 и 4 через второй основной входной вал 12, пару зубчатых колес 15, промежуточный вал 14, пару зубчатых колес 16, вспомогательный входной вал 13, пару 22 зубчатых колес второй скорости, выходной вал 17 и т.п.
Кроме того, если ECU 8 определяет, что переключение с понижением передачи в состояние первой скорости ожидается в соответствии с состоянием движения транспортного средства во время движения на ступени второй скорости, с приводом от двигателя 2, первый синхронизатор S1 помещают в состояние установленной ступени первой скорости или в предварительное состояние для переключения, в котором первый синхронизатор S1 сведен близко к установленному состоянию ступени первой скорости. Это позволяет достичь состояния на стороне второй скорости при подготовке к ступени первой скорости, при которой возможно плавное переключение с понижением передачи со ступени второй скорости на ступень первой скорости.
Кроме того, управление электродвигателя 3 в дополнение к двигателю 2 в этом состоянии также обеспечивает помощь при движении электродвигателя 3. В этом случае, движущая сила, выводимая из электродвигателя 3, передается на ведущие колеса 4 и 4 через солнечное зубчатое колесо 9s, пару 20 зубчатых колес третьей скорости, выходной вал 17 и т.п. Кроме того, также возможно выполнять движение EV, с приводом с остановленном двигателем 2 в этом состоянии. Если привод от двигателя 2 будет остановлен, двигатель 2 может быть установлен, например, в состоянии отсечки подачи топлива или в состоянии холостого хода. Кроме того, транспортное средство может выполнять регенеративную операцию при замедлении.
Кроме того, если ECU 8 определяет, что ожидается переключение на ступень третьей скорости в соответствии с состоянием движения транспортного средства во время движения на ступени второй скорости, с приводом от двигателя 2, первый синхронизатор S1 помещают в установленное состояние ступени третьей скорости или в состояние предварительного переключения, при котором первый синхронизатор S1 переводят близко к установленному состоянию ступени третьей скорости. Это позволяет достичь на ступени второй скорости состояния подготовки для ступени третьей скорости, в котором переключение с повышением передачи может быть плавно выполнено со ступени второй скорости на ступень третьей скорости.
Кроме того, привод электродвигателя 3 в дополнение к двигателю 2 в этом состоянии также обеспечивает движения с помощью от электродвигателя 3. В этом случае, движущую силу, выводимую из электродвигателя 3, передают на ведущие колеса 4 и 4 через солнечное зубчатое колесо 9s, пару 20 зубчатых колес третьей скорости, выходной вал 17 и т.п. Кроме того, также возможно выполнять движение в режиме EV с приводом, в котором двигатель 2 остановлен в этом состоянии. Если привод от двигателя 2 остановлен, двигатель 2 может быть приведен, например, в состояние отсечки подачи топлива или в состояние холостого хода. Кроме того, транспортное средство может выполнять регенеративную операцию при замедлении.
Ступень третьей скорости
Ступень третьей скорости устанавливается путем помещения первого синхронизатора S1 в установленное состояние ступени третьей скорости и помещения второго синхронизатора S2, синхронизатора SL кольцевого зубчатого колеса и синхронизатора SR обратного хода в нейтральное состояние. Если транспортное средство движется от двигателя 2, первое сцепление С1 установлено в состояние "включено". На ступени третьей скорости движущую силу, выводимую из двигателя 2, передают на ведущие колеса 4 и 4 через первый основной входной вал 11, пару 20 зубчатых колес третьей скорости, выходной вал 17 и т.п.
Кроме того, привод от электродвигателя 3 в дополнение к двигателю 2 также обеспечивает движение с помощью от электродвигателя 3 на ступени третьей скорости. В этом случае, движущую силу, выводимую из электродвигателя 3, передают на ведущие колеса 4 и 4 через солнечную зубчатую передачу 9s, пару 20 зубчатых колес третьей скорости, выходной вал 17 и т.п. Кроме того, движение EV может быть выполнено с установкой первого сцепления С1 в состояние "выключено". Кроме того, также возможно выполнять движение EV с установкой первого сцепления С1 в состояние "включено" и остановкой привода двигателя 2. Кроме того, транспортное средство выполнено с возможностью выполнения регенеративной операции при замедлении на ступени третьей скорости.
В то время как транспортное средство движется на ступени третьей скорости, ECU 8 прогнозирует, следует ли изменить ступень переменной скорости на ступень второй скорости или ступень четвертой скорости на основе состояния движения транспортного средства. Если ECU 8 ожидает переключения с понижением на ступень второй скорости, второй синхронизатор S2 переводят в установленное состояние ступени второй скорости или в состояние предварительного переключения, в котором второй синхронизатор S2 переводят близко к установленному состоянию ступени второй скорости. Это позволяет получить состояние на ступени третьей скорости при подготовке к ступени второй скорости, на которой может быть выполнено плавное переключение с понижением со ступени третьей скорости на ступень второй скорости.
Кроме того, если ECU 8 ожидает выполнения переключения с повышением передачи до ступени четвертой скорости во время движения на ступени третьей скорости, второй синхронизатор S2 переводят в установленное состояние ступени четвертой скорости или в состояние предварительного переключения, в котором второй синхронизатор S2 переводят близко в установленное состояние ступени четвертой скорости. Это позволяет достичь на ступени третьей скорости состояния подготовки к переключению на четвертую скорость, на котором переключение с повышением передачи возможно выполнить плавно со ступени третьей скорости на ступень четвертой скорости.
Ступень четвертой скорости
Ступень четвертой скорости устанавливают путем помещения второго синхронизатора S2 в установленное состояние ступени четвертой скорости и установки первого синхронизатора S1, синхронизатора SL кольцевого зубчатого колеса и синхронизатора SR обратного хода в нейтральное состояние. Если транспортное средство движется с приводом от двигателя 2, второе сцепление С2 устанавливают в состояние "включено". На ступени четвертой скорости движущую силу, выводимую из двигателя 2, передают на ведущие колеса 4 и 4 через второй основной входной вал 12, пару зубчатых колес 15, промежуточный вал 14, пару зубчатых колес 16, вспомогательный входной вал 13, пару зубчатых колес 23 четвертой скорости, выходной вал 17 и т.п.
В то время как транспортное средство движется на ступени четвертой скорости с приводом от двигателя 2, ECU 8 прогнозирует, требуется ли изменить ступень переменной скорости после ступени третьей скорости или после ступени пятой скорости на основе состояния движения транспортного средства. Если ECU 8 ожидает переключения с понижением передачи на ступень третьей скорости, первый синхронизатор S1 помещают в установленное состояние ступени третьей скорости или в состояние перед переключением, в котором первый синхронизатор S1 переводят в состояние, близкое к установленному состоянию третьей скорости. Это позволяет достичь состояния на ступени четвертой скорости при подготовке к ступени третьей скорости, в котором возможно плавно выполнить переключение с понижением передачи со ступени четвертой скорости на ступень третьей скорости.
Кроме того, привод в движение электродвигателя 3, в дополнение к двигателю 2, в этом состоянии, также обеспечивает движение с помощью от электродвигателя 3. В этом случае, движущую силу, выводимую из электродвигателя 3, передают на ведущие колеса 4 и 4 через солнечное зубчатое колесо 9s, пару 20 зубчатых колес третьей скорости 20, выходной вал 17 и т.п. Кроме того, также возможно выполнять EV движение с приводом в состоянии, в котором двигатель 2 остановлен. Если привод от двигателя 2 остановлен, двигатель 2 может быть переведен, например, в состояние отсечки подачи топлива или в состояние холостого хода. Кроме того, транспортное средство выполнено с возможностью выполнять регенеративную операцию при замедлении.
Кроме того, если ECU 8 ожидает переключения с повышением передачи до ступени пятой передачи во время движения до ступени четвертой скорости, с приводом от двигателя 2, первый синхронизатор S1 помещают в установленное состояние ступени пятой скорости или в состояние предварительного переключения, в котором первый синхронизатор S1 введен в установленное состояние, близкое к состоянию пятой скорости. Это позволяет достичь состояния на ступени четвертой скорости при подготовке к ступени пятой скорости, в котором переключение с повышением передачи возможно плавно выполнить со ступени четвертой скорости на ступень пятой скорости.
Кроме того, привод от электродвигателя 3 в дополнение к двигателю 2 в этом состоянии также обеспечивает возможность движения с помощью от электродвигателя 3. В этом случае, движущую силу, выводимую от электродвигателя 3, передают на ведущие колеса 4 и 4 через солнечное зубчатое колесо 9s, пару 21 зубчатых колес пятой скорости, выходной вал 17 и т.п. Кроме того, также возможна работа в режиме, EV, с приводом от двигателя 2, остановленным в этом состоянии. Если управление двигателем 2 остановлено, двигатель 2 может быть переведен, например, в состояние отсечки топлива или в состояние холостого хода. Кроме того, транспортное средство может выполнять регенеративную операцию при замедлении.
Ступень пятой скорости
Ступень пятой скорости устанавливается путем установки первого синхронизатора S1 в установленное состояние ступени пятой скорости и установки второго синхронизатора S2, синхронизатора SL кольцевого зубчатого колеса, и синхронизатора SR обратного хода в нейтральное состояние. Если двигатель движется от двигателя 2, первое сцепление С1 устанавливают в состояние "включено". На ступени пятой скорости движущую силу, выводимую из двигателя 2, передают на ведущие колеса 4 и 4 через первый основной входной вал 11, пару 21 зубчатых колес пятой скорости, выходной вал 17 и т.п.
Кроме того, привод от электродвигателя 3 в дополнение к двигателю 2 также обеспечивает возможность движения с помощью от электродвигателя 3 на ступени пятой скорости. В этом случае, движущую силу, выводимую от электродвигателя 3, передают на ведущие колеса 4 и 4 через солнечное зубчатое колесо 9s, пара 21 зубчатых колес пятой скорости, выходной вал 17 и т.п. Кроме того, движение в режиме EV также может быть выполнено с первым сцеплением С1 в состоянии "выключено". Кроме того, возможно выполнять движение в режиме EV с первым сцеплением С1 в состоянии "ВКЛЮЧЕНО", которое остановил С1, и с остановленным приводом от двигателя 2. Кроме того, транспортное средство может выполнять регенеративную операцию на ступени пятой скорости.
Если ECU 8 определяет, что ступень переменной скорости далее должна быть переключена на ступень четвертой скорости, на основе состояния движения транспортного средства, в то время как транспортное средство движется в состоянии ступени пятой скорости, ECU 8 устанавливает второй синхронизатор S2 в установленное состояние ступени четвертой скорости или в состояние предварительного переключения, в котором второй синхронизатор S2 переводят близко к установленному состоянию ступени четвертой скорости. Это позволяет достичь состояния, в котором ступень пятой скорости подготавливается для переключения на ступень четвертой скорости, и такое переключение с понижением передачи может быть выполнено плавно со ступени пятой скорости на ступень четвертой скорости.
Ступень обратного хода
Ступень обратного хода устанавливается путем помещения синхронизатора SR обратного хода в состояние, в котором вал 24 обратного хода соединяется с зубчатым колесом 25а обратного хода, перевода второго синхронизатора S2 в установленное состояние ступени второй скорости и установки первого синхронизатора S1 и синхронизатора SL кольцевого зубчатого колеса в нейтральное состоянии. Если транспортное средство движется от двигателя 2, первое сцепление С1 установлено в состояние "включено". В состоянии движения задним ходом движущая сила, выводимая от двигателя 2, передается на ведущие колеса 4 и 4 через первый основной входной вал 11, пару зубчатых колес 26 обратного хода, промежуточный вал 25 обратного хода, вал 24 обратного хода, пару зубчатых колес 27 обратного хода, промежуточный вал 14, пару зубчатых колес 16, вспомогательный входной вал 13, пару 22 зубчатых колес второй скорости, выходной вал 17 и т.п.
Кроме того, привод от электродвигателя 3 в дополнение к двигателю 2 также обеспечивает движение с помощью от электродвигателя 3 на ступени движения задним ходом. В этом случае, движущую силу, выводимую от электродвигателя 3, передают на ведущие колеса 4 и 4 через солнечное зубчатое колесо 9s, первый основной входной вал 11, пару зубчатых колес 26 обратного хода, промежуточный вал 25 обратного хода, вал 24 обратного хода, пару зубчатых колес 27 обратного хода, промежуточный вал 14, пару зубчатых колес 16, вспомогательный входной вал 13, пару 22 зубчатых колес второй скорости, выходной вал 17 и т.п. Кроме того, также возможно выполнить движение EV с переводом первого сцепления С1 в состояние "ВЫКЛЮЧЕНО". Кроме того, транспортное средство выполнено с возможностью выполнения регенеративной операции при замедлении на ступени обратного хода.
Второй вариант осуществления
Устройство 40 силовой передачи для гибридного транспортного средства в соответствии со вторым вариантом осуществления настоящего изобретения будет описано ниже со ссылкой на приложенные чертежи. Устройство 40 силовой передачи аналогично устройству 1 силовой передачи в соответствии с первым вариантом осуществления, и, поэтому, ниже будут описаны только отличия.
Устройство 40 силовой передачи обеспечивает ступени переменной скорости с семью ступенями движения вперед и одной ступенью движения назад, на которых две ступени движения вперед для ступеней с переменной скоростью добавлены к устройству 1 силовой передачи.
На первом основном входном валу 11А предусмотрена первая группа 18 зубчатых колес, состоящая из множества зубчатых колес 18а, 18b, и 18с, избирательно подключаемых к выходному валу 17 через первый синхронизатор (механизм синхрозацепления) S1.
Как показано на фиг.5, на первом основном входном валу 11А предусмотрена первая группа зубчатых колес, состоящая из множества зубчатых колес 18а, 18b и 18с, избирательно соединенных с выходным валом 17А через два синхронизатора (механизмы синхрозацепления), а именно первый синхронизатор S1 и третий синхронизатор S3.
Первый синхронизатор S1 избирательно соединяет зубчатое колесо 18а третьей скорости или зубчатое колесо 18с седьмой скорости с первым основным входным валом 11 путем перемещения муфты в осевом направлении первого основного входного вала 11А. Если муфта движется из представленного нейтрального положения в левую сторону, зубчатое колесо 18а третьей скорости соединяется с первым основным входным валом 11А. С другой стороны, если муфта движется из нейтрального положения в правую сторону, зубчатое колесо 18 с седьмой скорости соединяется с первым основным входным валом 11А. Когда муфта находится в нейтральном положении, как зубчатое колесо 18а третьей скорости, так и зубчатое колесо 18с седьмой скорости отсоединяются от первого основного входного вала 11А.
Третий синхронизатор S3 избирательно соединяет зубчатое колесо 18b пятой скорости с первым основным входным валом 11А путем перемещения муфты в осевом направлении первого основного входного вала 11А. Если муфта перемещается из представленного нейтрального положения в правую сторону, зубчатое колесо 18b пятой скорости подключается к первому основному входному валу 11А. Когда муфта находится в нейтральном положении, зубчатое колесо 18b пятой скорости отсоединяется от первого основного входного вала 11А.
На вспомогательном входном валу 13А предусмотрена вторая группа зубчатых колес, состоящая из множества зубчатых колес 19а, 19b и 19с, избирательно подключающих вспомогательный входной вал 13А к выходному валу 17 через два синхронизатора (механизмы синхрозацепления), а именно второй синхронизатор S2 и четвертый синхронизатор S4.
Второй синхронизатор S2 избирательно соединяет зубчатое колесо 19а второй скорости или зубчатое колесо 19с шестой скорости со вспомогательным входным валом 13А, перемещая муфту в осевом направлении вспомогательного входного вала 13А. Если муфта перемещается из представленного нейтрального положения в левую сторону, зубчатое колесо 19а второй скорости соединяется со вспомогательным входным валом 13А. С другой стороны, если муфта перемещается из нейтрального положения в правую сторону, зубчатое колесо 19с шестой скорости соединяется со вспомогательным входным валом 13А. Когда муфта находится в нейтральном положении, оба из второго зубчатого колеса скорости 19а и зубчатого колеса 19с шестой скорости отсоединены от вспомогательного входного вала 13А.
Четвертый синхронизатор S4 избирательно соединяет зубчатое колесо 19b четвертой скорости со вспомогательным входным валом 13А, перемещая муфту в осевом направлении вспомогательного входного вала 13А. Если муфта перемещается от представленного нейтрального положения в правую сторону, зубчатое колесо 19b четвертой скорости соединяется со вспомогательным входным валом 13А. Когда муфта находится в нейтральном положении, зубчатое колесо 19b четвертой скорости отсоединено от вспомогательного входного вала 13А.
Вспомогательный входной вал 13А соединен с выходным валом 17А через пару 20 зубчатых колес третьей скорости, пару 21 зубчатых колес пятой скорости, и пару 41 зубчатых колес седьмой скорости. Пара 41 зубчатых колес седьмой скорости составлена из зубчатого колеса 18 с седьмой скорости и зубчатого колеса 17е, установленных на выходном валу 17А, которые зацепляются друг с другом.
Вспомогательный входной вал 13А и выходной вал 17А соединены друг с другом через пару 22 зубчатых колес второй скорости, пару 23 зубчатых колес четвертой скорости и пару 42 зубчатых колес шестой скорости. Пара 42 зубчатых колес шестой скорости составлена из зубчатого колеса 19с шестой скорости и зубчатого колеса 17е установленного на выходном валу 17А, которые зацеплены друг с другом. В этом варианте осуществления зубчатое колесо 17а малой скорости, зубчатое колесо 17b высокой скорости и зубчатое колесо 17е, расположенные на выходном валу 17А, соответствуют группе третьей передачи настоящего изобретения.
Устройство 1А силовой передачи, имеющее описанную выше конфигурацию, изменяет скорость вращения входного вала через множество ступеней через соответствующие пары зубчатых колес с множеством ступеней переменной скорости, имеющих разные передаточные числа, в соответствии с состояниями установки синхронизаторов S1-S4, SR и SL, и выводит движущую силу на выходной вал 17А. В Таблице на фиг.6 показаны рабочие состояния соответствующих частей, на соответствующих ступенях переменной скорости в режиме работы двигателя устройства 40 силовой передачи, хотя их подробное описание исключено.
Третий вариант осуществления
Устройство 50 силовой передачи для гибридного транспортного средства в соответствии с третьим вариантом осуществления настоящего изобретения будет описано ниже со ссылкой на прилагаемые чертежи. Одинаковые номера ссылочных позиций заданы для элементов, эквивалентных элементам устройства 1 силовой передачи в соответствии с первым вариантом осуществления, и их описание опущено.
Как показано на фиг.7, выходной вал 2а двигателя 2 соединен с двумя основными входными валами, а именно первым основным входным валом 51 и вторым основным входным валом 52, на которое избирательно подают движущую силу от двигателя 2 и которые расположены коаксиально друг другу. Первый основной входной вал 51 продолжается со стороны двигателя 2 на сторону электродвигателя 3, и второй основной входной вал 52, сформированный полым, установлен с возможностью вращения снаружи от первого основного входного вала 51 на стороне двигателя 2. Первый основной входной вал 51 соединяется с или отсоединяется или от выходного вала 2а двигателя 2 с помощью первого сцепления С1. Второй основной входной вал 52 соединяется с или отсоединяется или от выходного вала 2а двигателя 2 с помощью второго сцепления С2.
Два вспомогательных входных вала, а именно первый вспомогательный входной вал 53 и второй вспомогательный входной вал 54, расположены параллельно основным входным валам 51 и 52, соответственно. Кроме того, первый основной входной вал 51 и первой вспомогательный входной вал 53 всегда соединяются друг с другом через пару зубчатых колес 55 замедления. Пара зубчатых колес 55 замедления состоит из зубчатого колеса 51а, установленного на первом основном входном валу 51, и зубчатого колеса 53а, установленного на первом вспомогательном входном валу 53, которые зацепляются друг с другом. Пара зубчатых колес 55 замедления замедляет движущую силу, передаваемую на первый основной входной вал 51, и передает эту движущую силу на первый вспомогательный входной вал 53.
Кроме того, второй основной входной вал 52 и второй вспомогательный входной вал 54 всегда соединены друг с другом через пару зубчатых колес 56, повышающих скорость. Пара зубчатых колес 56, повышающих скорость, состоит из зубчатого колеса 52а, установленного на втором основном входном валу 52, и зубчатого колеса 54а, установленного на втором вспомогательном входном валу 54, которые зацеплены друг с другом. Пара зубчатых колес 56, повышающих скорость, ускоряет движущую силу, передаваемую на второй основной входной вал 52, и передает эту движущую силу на второй, вспомогательный входной вал 54. Оба конца первого вспомогательного входного вала 53 и второго вспомогательного входного вала 54 установлены с возможностью вращения на подшипники валов, которые не показаны.
Первое сцепление С1 представляет собой механизм сцепления, работающий таким образом, что выходной вал 2а двигателя 2 работает так, чтобы его можно было соединять или отсоединять с или от первого вспомогательного входного вала 53 через первый основной входной вал 51 и пару зубчатых колес 55 замедления под управлением ECU 8. Второе сцепление С2 представляет собой механизм сцепления, работающий таким образом, что выходной вал 2а двигателя 2 работает так, что он соединяется или отсоединяется с или от второго вспомогательного входного вала 54 через второй основной входной вал 52 и пару зубчатых колес 56, повышающих скорость, под управлением ECU 8.
Если первое сцепление С1 установлено в соединенное состояние, первый вспомогательный входной вал 53 соединен с выходным валом 2а через первый основной входной вал 51 и пару зубчатых колес 55 замедления. В этом состоянии возможна только передача мощности от выходного вала 2а на первый вспомогательный входной вал 53, и передача мощности от выходного вала 2а на второй вспомогательный входной вал 54 прерывается. Кроме того, если второе сцепление С2 будет установлено в соединенное состояние, второй вспомогательный входной вал 54 соединяется с выходным валом 2а через второй основной входной вал 52 и пару зубчатых колес 56, повышающих скорость. В этом состоянии возможна только передача мощности от выходного вала 2а на второй вспомогательный входной вал 54, и передача мощности от выходного вала 2а на первый вспомогательный входной вал 53 прерывается.
Кроме того, эти сцепления С1 и С2, предпочтительно, представляют собой сухие сцепления. В этом случае, сухие сцепления С1 и С2 обеспечивают возможность уменьшения времени "включения и выключения" и уменьшения размера элемента включения и выключения по сравнению со случаем, когда сцепления С1 и С2 представляют собой мокрые сцепления. Кроме того, удар, вызываемый изменением движущей силы, генерируемой при торможении двигателем и т.п., может быть подавлен путем управления электродвигателем 3.
Выходной вал 57 расположен коаксиально с основными входными валами 51 и 52. В этом варианте осуществления выходной вал 57, сформированный полым, установлен с возможностью вращения снаружи от первого основного входного вала 51 на стороне электродвигателя 3. Кроме того, выходной вал 57 и первый вспомогательный входной вал 53 соединены друг с другом через последовательность 58 зубчатых колес скоростей с нечетными номерами. Последовательность 58 зубчатых колес скоростей с нечетными номерами состоит из пары 59 зубчатых колес третьей скорости, в которой первое зубчатое колесо 57а, установленное на выходном валу 57, зацеплено с зубчатым колесом 53b третьей скорости, которое установлено с возможностью вращения на первом вспомогательном входном валу 53, и пары 60 зубчатых колес пятой скорости, в которой второе зубчатое колесо 57b, установленное на выходном валу 57, зацеплено с зубчатым колесом 53 с пятой скорости, которое предусмотрено с возможностью вращения на первом вспомогательном входном валу 53.
Кроме того, выходной вал 57 и второй вспомогательный входной вал 54 соединены друг с другом через последовательность 61 зубчатых колес скоростей с четными номерами. Последовательность 61 зубчатых колес скоростей с четными номерами состоит из пары 62 зубчатых колес второй скорости, в которой первое зубчатое колесо 57а, установленное на выходном валу 57, зацеплено со вторым зубчатым колесом 54b, предусмотренным с возможностью вращения на втором вспомогательном входном валу 54, и пары 63 зубчатых колес четвертой скорости, в которой второе зубчатое колесо 57b, установленное на выходном валу 57, зацеплено с зубчатым колесом 54с четвертой скорости, которое предусмотрено с возможностью вращения на втором вспомогательном входном валу 54.
В этом варианте осуществления зубчатое колесо 53b третьей скорости, расположенное на первом вспомогательном входном валу 53, и зубчатое колесо 53 с пятой скорости, соответствуют первой группе зубчатых колес в соответствии с настоящим изобретением, зубчатое колесо 54b второй скорости и зубчатое колесо 54с четвертой скорости, расположенные на втором вспомогательном входном валу 54, соответствуют второй группе зубчатых колес в соответствии с настоящим изобретением, и первое зубчатое колесо 57а и второе зубчатое колесо 57b, расположенные на выходном валу 57, соответствуют третьей группе зубчатых колес в соответствии с настоящим изобретением. Кроме того, второй основной входной вал 52 и выходной вал 57, установленные поверх первого основного входного вала 51, установлены с возможностью вращения с помощью подшипников валов, которые не представлены.
На первом вспомогательном входном валу 53 предусмотрен первый синхронизатор S1, который позволяет переключаться между соединением и разъединением зубчатого колеса 53b третьей скорости или зубчатого колеса 53с пятой скорости, и первым вспомогательным входным валом 53. Первый синхронизатор S1 избирательно подключает зубчатое колесо 53b третьей скорости или зубчатое колесо 53с пятой скорости к первому вспомогательному входному валу 53, путем перемещения муфты в осевом направлении первого вспомогательного входного вала 53. Если муфта движется в правую сторону на чертеже, зубчатое колесо 53b третьей скорости и первый вспомогательный входной вал 53 могут быть соединены друг с другом, и первый вспомогательный входной вал 53 соединен с выходным валом 57 с помощью пары 59 зубчатых колес третьей скорости, в результате чего устанавливается ступень третьей скорости. С другой стороны, если муфта движется в левую сторону на чертеже, зубчатое колесо 53с пятой скорости и первый вспомогательный входной вал 53 соединяются друг с другом, и первый вспомогательный входной вал 53 соединяется с выходным валом 57 с помощью пары 60 зубчатых колес пятой скорости, с помощью которой устанавливается ступень пятой скорости. Когда муфта находится в нейтральном положении на схеме, как зубчатое колесо 53b третьей скорости, так и зубчатое колесо 53с пятой скорости отсоединяются от первого вспомогательного входного вала 53.
На втором вспомогательном входном валу 54 предусмотрен второй синхронизатор S2, который выполнен с возможностью переключения между соединением и разъединением зубчатого колеса 54b второй скорости или зубчатого колеса 54с четвертой скорости, и второго вспомогательного входного вала 54. Второй синхронизатор S2 избирательно соединяет зубчатое колесо 54b второй скорости или зубчатое колесо 54с четвертой скорости со вторым вспомогательным входным валом 54, путем перемещения муфты в осевом направлении второго вспомогательного входного вала 54. Если муфта движется в правую сторону по схеме, зубчатое колесо 54b второй скорости и второй вспомогательный входной вал 54 соединяются друг с другом, и второй вспомогательный входной вал 54 соединяется с выходным валом 57 с помощью пары 62 зубчатых колес второй скорости, в результате чего устанавливается ступень второй скорости. С другой стороны, если муфта движется в левую сторону по схеме, зубчатое колесо 54с четвертой скорости и второй вспомогательный входной вал 54 соединяются друг с другом, и второй вспомогательный входной вал 54 соединяется с выходным валом 57 с помощью пары 63 зубчатого колеса четвертой скорости, с помощью которой устанавливается ступень четвертой скорости. Когда муфта находится в нейтральном положении на схеме, как зубчатое колесо 54b второй скорости, так и зубчатое колесо 54с четвертой скорости отсоединяются от второго вспомогательного входного вала 54.
Солнечное зубчатое колесо 9s механизма 9 дифференциального вращения закреплено на одном конце первого основного входного вала 51 стороны электродвигателя 3 и соединено с первым основным входным валом 51, так чтобы вращаться, путем взаимной блокировки с первым основным входным валом 51. Первый основной входной вал 51 соединен с первым вспомогательным входным валом 53 через пару зубчатых колес 55 замедления, и, поэтому, солнечное зубчатое колесо 9s всегда соединяется с первым, вспомогательным входным валом 53 через первый основной входной вал 51 и пару зубчатых колес 55 замедления.
Кольцевое зубчатое колесо 9r соединено с внутренней частью ротора 3а так, что оно вращается с взаимной блокировкой с ротором 3а электродвигателя 3.
Водило 9с неподвижно установлено на одном конце выходного вала 57 на стороне электродвигателя 3 и соединено с выходным валом 57 для вращения путем взаимной блокировки с выходным валом 57.
Следует отметить, что, хотя второй вспомогательный входной вал 54 соединен со вторым основным входным валом 52 через пару зубчатых колес 56, повышающих скорость, второй основной входной вал 52 не соединен ни с одним из вращающихся элементов 9s, 9r и 9с механизма 9 дифференциального вращения. Поэтому второй вспомогательный входной вал 54 выполнен с возможностью передачи движущей силы на выходной вал 57 без прохода через механизм 9 дифференциального вращения.
Обратный вал 64 расположен параллельно первому основному входному валу 51 и, кроме того, к выходному валу 57. Кроме того, выходной вал 57 и обратный вал 64 соединены друг с другом через пару обратных зубчатых колес 65 (см. фиг.8). Пара обратных зубчатых колес 65 состоит из первого зубчатого колеса 57а, закрепленного на выходном валу 57, и зубчатого колеса 64а, установленного на обратном валу 64, которые зацеплены друг с другом.
Обратный вал 64 соединен с ведущими колесами 4 и 4 через модуль 30 дифференциального механизма между ведущими колесами 4 и 4. Зубчатое колесо 64b, установленное на обратном валу 64, зацеплено с зубчатым колесом 30b модуля 30 дифференциального механизма. Таким образом, обратный вал 64 соединяется с ведущими колесами 4 и 4 через модуль 30 дифференциального механизма для вращения путем взаимного соединения с ведущими колесами 4 и 4. Кроме того, зубчатое колесо 64с парковки, зацепляющееся с зубчатым колесом механизма парковки, которое не показано, также установлено на обратном валу 64. Оба конца обратного вала 64 установлены с возможностью вращения на подшипниках валов, которые не показаны.
Вал 68 обратного хода расположен параллельно первому основному входному валу 51 и, кроме того, второму основному входному валу 52. Кроме того, второй основной входной вал 52 и вал 68 обратного хода соединены друг с другом через пару зубчатых колес 69 обратного хода (см. фиг.8). Пара зубчатых колес 69 обратного хода состоит из зубчатого колеса 54а, установленного на втором основном входном валу 52, и зубчатого колеса 68а, которое установлено с возможностью вращения на валу 68 обратного хода, которые зацеплены друг с другом. Оба конца вала 68 обратного хода установлены с возможностью вращения на подшипники вала, которые не показаны.
На валу 68 обратного хода предусмотрен синхронизатор SR обратного хода, выполненный с возможностью переключения между состояниями соединения и разъединения зубчатого колеса 68а и зубчатого колеса 68b, которые предусмотрены с возможностью вращения на валу 68 обратного хода. Зубчатое колесо 68b зацепляется с зубчатым колесом 51а, которое установлено на первом основном входном валу 51, составляя, таким образом, пару зубчатых колес 70 обратного хода.
Синхронизатор SR обратного является хорошо известным и выполняет соединение и разъединение между зубчатым колесом 68а и зубчатым колесом 68b, путем перемещения муфты в осевом направлении вала 68 обратного хода путем использования элемента привода и вилки переключения, которые не показаны. Если муфта находится в положении, показанном на схеме, зубчатое колесо 68а отсоединено от зубчатого колеса 68b. Если муфта движется в левую сторону по схеме, зубчатое колесо 68а соединяется с зубчатым колесом 68b, и первый основной входной вал 51 соединяется со вторым вспомогательным входным валом 54 через пару зубчатых колес 69 и 70 обратного хода.
Когда зубчатое колесо 68а соединено с зубчатым колесом 68b с помощью синхронизатора SR обратного хода, вращение второго основного входного вала 52, который вращается в направлении, в котором выходной вал 2а вращается во время привода двигателя 2 (ниже это направление называется "направлением вперед") (ниже называется "вращением в направлении вперед"), меняют на обратное и передают на первый основной входной вал 51, и первый основной входной вал 51 вращается в направлении, противоположном направлению вперед (ниже это обратное направление называется "направлением обратного хода") (ниже называется "вращением в обратном направлении").
Когда зубчатое колесо 68а соединяется с зубчатым колесом 68b с помощью синхронизатора SR обратного хода, оси 31 и 31 вращаются в направлении обратного хода в случае, когда выходной вал 2а двигателя 2 вращается в направлении вперед, и ведущие колеса 4 и 4 вращаются в направлении, обеспечивающем движение транспортного средства задним ходом. С другой стороны, когда зубчатое колесо 68а отсоединяют от зубчатого колеса 68b, оси 31 и 31 вращаются в направлении вперед в случае, когда выходной вал 2а двигателя 2 вращается в прямом направлении, и ведущие колеса 4 и 4 вращаются в направлении, в котором транспортное средство движется вперед.
Кроме того, входной вал 5а вспомогательного устройства 5 расположен параллельно первому, вспомогательному входному валу 53. Кроме того, первый вспомогательный входной вал 53 и входной вал 5а вспомогательного устройства 5 соединены друг с другом через ременный механизм 71. Ременный механизм 71 состоит из зубчатой передачи 53d, установленной на первом, вспомогательном входном валу 53, и зубчатого колеса 5b, закрепленного на входном валу 5а, которые соединены друг с другом через ремень 71а. Входной вал 5а вспомогательного устройства 5 имеет муфту 33 вспомогательного устройства 33, расположенную на нем, и зубчатое колесо 5b коаксиально соединяется с входным валом 5а вспомогательного устройства 5 через муфту 33 вспомогательного устройства.
В устройстве 50 силовой передачи, имеющем описанную выше конфигурацию, движущую силу, выводимую из выходного вала 2а двигателя 2, передают на ведущие колеса 4 и 4 через первый путь силовой передачи от первого основного входного вала 51 на выходной вал 57 через пару зубчатых колес 55 замедления и первый вспомогательный входной вал 53 или второй путь силовой передачи от второго основного входного вала 52 к выходному валу 57 через пару зубчатых колес 56, повышающих скорость, и второй вспомогательный входной вал 54.
Кроме того, движущую силу, выводимую из выходного вала 2а двигателя 2, передают с первого основного входного вала 51 на солнечное зубчатое колесо 9s или/и в водило 9с через выходной вал 57, и затем подают на механизм 9 дифференциального вращения. Движущую силу, выводимую из электродвигателя 3, передают на кольцевое зубчатое колесо 9r и затем подают в механизм 9 дифференциального вращения. После этого, механизм 9 дифференциального вращения объединяет входные движущие силы, и объединенную движущую силу передают на ведущие колеса 4 и 4 через выходной вал 57, для помощи движущей силы, передаваемой от двигателя 2 на выходной вал 57, без прохода через механизм 9 дифференциального вращения. Когда кольцевое зубчатое колесо 9r вращается в обратном направлении, электродвигатель 3 выполняет регенеративную операцию.
Далее будет описана операция устройства 50 силовой передачи в соответствии с данными вариантами осуществления. Устройство 50 силовой передачи имеет широкое разнообразие режимов операций. На фиг.9 и 11 - фиг.25 визуально иллюстрируются состояния операций устройства 50 силовой передачи в различных режимах операций. На этих схемах первое сцепление С1, второе сцепление С2 и сцепление 33 вспомогательного устройства, каждое представлено толстой линией в случае, когда рабочее состояние каждого из первого сцепления С1, второго сцепления С2 и сцепления 33 вспомогательного устройства представляют собой соединенное состояние (ниже называется "состояние ВКЛЮЧЕНО"), в то время как каждое сцепление C1, С2 и 33 представлено нормальной сплошной линией в случае, когда состояние операции представляет собой разъединенное состояние (ниже называется "состояние ВЫКЛЮЧЕНО"). Кроме того, в соответствующих режимах работы составляющие устройства 50 силовой передачи, которые вращаются, будучи соединенными с другими составляющими, представлены толстыми линиями.
В данном варианте осуществления основные режимы работы устройства 50 силовой передачи включают в себя режим работы от двигателя, в котором транспортное средство движется с использованием только двигателя 2, в качестве источника генерирования электроэнергии транспортного средства, режим движения EV, в котором транспортное средство движется только от электродвигателя 3, в качестве источника генерирования электроэнергии транспортного средства, и режим движения HEV, в котором транспортное средство движется, как с использованием двигателя 2, так и с приводом от электродвигателя 3. Режим движения HEV включает в себя режим движения с помощью (комбинированный режим движения), в котором транспортное средство движется с выходом от электродвигателя 3, который добавляют к выходу двигателя 2, и регенеративный режим движения, в котором транспортное средство движется с выходом от двигателя 2, подаваемым на электродвигатель 3, в то время как электродвигатель 3 выполняет регенеративную операцию. В регенеративном режиме движения батарея 7 заряжается в результате регенеративной операции электродвигателя 3. В режиме движения EV электродвигатель 3 выводит движущую силу путем потребления электроэнергии, накопленной в батарее 7.
Кроме того, в данном варианте осуществления, ECU 8 устанавливает запрашиваемую мощность (запрашиваемую движущую силу) транспортного средства, используя заданную карту и т.п., на основе переменной, манипулируемой ускорителем, скорости автомобиля и т.п. транспортного средства и выбирает каждый режим движения или ступень переменной скорости в соответствии с запрашиваемой мощностью. Кроме того, ECU 8 управляет устройством 1 силовой передачи в соответствии с выбранным режимом движения, ступенью переменной скорости и т.п.
Например, ECU 8 выбирает режим движения с помощью, когда движущая сила, выводимая из двигателя 2 и подаваемая в механизм 9 дифференциального вращения (ниже называется "соответствующая рабочая мощность"), меньше, чем запрашиваемая мощность, когда двигатель 2 работает в соответствующей рабочей области, такой как, например, область, в которой происходит предпочтительное потребление топлива. В этом случае, ECU 8 управляет батареей 7 для подачи движущей силы, для смещения недостатка по сравнению с запрашиваемой мощностью. Если, однако, существует потребность во включении электродвигателя 3 на выход или в случае, когда скорость превышает номинальный выход или максимальную частоту об/мин, для смещения недостатка, электродвигатель 3 работает с номинальной выходной мощностью или при максимальных об/мин, и выход двигателя 2 увеличивается.
Кроме того, когда соответствующая рабочая мощность превышает требуемую мощность, ECU 8 выбирает режим регенеративного движения для заряда батареи 7 с использованием дифференциальной движущей силы (энергии), получаемой в результате уменьшения потерь передачи трансмиссии, связанной с зубчатыми колесами и т.п., от соответствующей рабочей мощности. Также, когда уровень заряда (SOC) батареи 7 низкий, ECU 8 выбирает регенеративный режим движения, для того, чтобы повысить заряд батареи 7 и увеличить выход из двигателя 2.
Начало движения на ступени первой скорости, движение
На фиг.10 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени первой скорости (ступень псевдопервой скорости). Ступень первой скорости представляет собой ступень с переменной скоростью, имеющую передаточное число, более низкое, чем у ступени второй скорости, описанной ниже. В состоянии передвижения на ступени первой скорости ECU 8 устанавливает первое сцепление С1 в состояние "включено" и устанавливает (активирует или поддерживает) первый синхронизатор S1, второй синхронизатор S2 и синхронизатор SR обратного хода в нейтральном состоянии.
Таким образом, движущая сила (количество об/мин Ne) выходного вала 2а двигателя 2 передают на солнечное зубчатое колесо 9s через первое сцепление С1 и первый основной входной вал 51, но движущую силу не передают от первого вспомогательного входного вала 53 и второго вспомогательного входного вала 54 на выходной вал 57. В это время, выходной вал 57 соединяются с осями 31 и 31 через обратный вал 64. Поэтому, если ведущие колеса 4 и 4 остаются неподвижными, их сопротивления, связанные с трением, не позволяют водилу 9с вращаться, даже если водило 9с начинает вращаться правым в результате вращения вперед солнечного зубчатого колеса 9s. Поэтому, как обозначено сплошной линией на фиг.10, кольцевое зубчатое колесо 9r вращается в направлении обратного хода с количеством об/мин Nr, и электродвигатель 3 выполняет регенеративную операцию для заряда батареи 7.
Таким образом, электродвигатель 3 выполняет регенеративную операцию, когда двигатель 2 находится в состоянии холостого хода и работает на холосто ходу, что обеспечивает возможность заряда батареи 7, используя движущую силу, выводимую из двигателя 2, для выработки электроэнергии, что приводит к экономии энергии. Кроме того, хотя обычно в сцеплении предусмотрен механизм скольжения, для поглощения движущей силы, генерируемой двигателем 2, в настоящем изобретении исключается необходимость обеспечивать механизм скольжения в первом сцеплении С1 и во втором сцеплении С2, в результате чего обеспечивается уменьшение размера сцеплений С1 и С2. На фиг.10 показана коллинеарная схема с направлением вперед, обозначенным "+", и направлением назад, обозначенным, как "-".
В этом состоянии ECU 8 обеспечивает подачу от батареи 7 электроэнергии в статор 3b электродвигателя 3, для вращения вращающегося магнитного поля, генерируемого в статоре 3b, в направлении вперед. Это передает крутящий момент, действующий для вращения ротора 3а в направлении вперед от статора 3b, благодаря чему возникает движущая сила в направлении, которое обеспечивает вращение кольцевого зубчатого колеса 9r в направлении вперед. Затем планетарная передача 9р вращается в направлении вперед под действием движущей силы для двигателя 2 для вращения солнечного зубчатого колеса 9s в направлении вперед и движущей силы электродвигателя 3, для вращения кольцевого зубчатого колеса 9r в направлении вперед, и, как обозначено штрихпунктирной линией на фиг.10, водило 9с вращается в направлении вперед, преодолевая сопротивление трения. Благодаря взаимному соединению при вращении вперед водила 9с, выходной вал 57 вращается в направлении вперед, и, таким образом, оси 31 и 31 вращаются в направлении вперед. Таким образом, ведущие колеса 4 и 4 вращаются в направлении передвижения вперед транспортного средства в состоянии передвижения на ступени первой скорости, на которой движущая сила двигателя 2 комбинируется с движущей силой электродвигателя 3. Таким образом, устройство 50 силовой передачи выполнено с возможностью начала движения и движения транспортного средства на ступени первой скорости в режиме помощи движению.
С другой стороны, если движущая сила (количество об/мин Ne) выходного вала 2а двигателя 2 увеличивается от указанного выше состояния, водило 9с вращается в направлении вперед, преодолевая сопротивление трения с кольцевым зубчатым колесом 9r, вращающимся в обратном направлении, как обозначено пунктирной линией на фиг.10. Выходной вал 57 вращается в направлении вперед, в результате взаимного блокирования с вращением вперед водила 9с, и оси 31 и 31 вращаются в направлении вперед. В это время кольцевое зубчатое колесо 9r вращается в обратном направлении, и поэтому электродвигатель 2 находится в состоянии регенеративной операции, в результате чего происходит заряд батареи 7. Таким образом, электродвигатель 3 выполняет регенеративную операцию, в то время как ведущие колеса 4 и 4 вращаются в направлении движения вперед транспортного средства в состоянии его движения вперед на ступени первой скорости только от движущей силы двигателя 2. Таким образом, устройство 50 силовой передачи выполнено с возможностью запуска и движения транспортного средства на ступени первой скорости в режиме регенеративного движения.
Поэтому устройство 50 силовой передачи выполнено с возможностью начала движения и движения транспортного средство на ступени с первой скоростью в различных режимах движения, а именно в режиме движения с помощью и в режиме регенеративного движения. В результате, устройство 50 силовой передачи выполнено с возможностью правильного использования режима движения во время начала движения в соответствии с требуемой мощностью, уровнем заряда батареи 7 и т.п. Вместе с солнечным зубчатым колесом 9s первый основной входной вал 51 вращается в направлении вперед, и движущую силу передают на входной вал 5а вспомогательного устройства 5 через пару зубчатых колес 55 замедления, первый вспомогательный входной вал 53, ременный механизм 71 и сцепление 33 вспомогательного устройства.
Таким образом, устройство силовой передачи выполнено с возможностью его запуска движение и движения с первым синхронизатором S1 и со вторым синхронизатором S2, установленными в нейтральное состояние. Поэтому, если устройство силовой передачи имеет такое же количество пар зубчатых колес переменной скорости, как и в передаче, описанной в Патентном документе 1, устройство силовой передачи имеет на одну ступень переменной скорости больше, в результате чего обеспечивается уменьшение длины вдоль оси.
Начало движения и движение обратным ходом
На фиг.11 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени обратного хода. В состоянии движения на ступени обратного хода ECU 8 устанавливает второе сцепление С2 в состояние "включено", первый синхронизатор S1 и второй синхронизатор S2 в нейтральное состоянии синхронизатор SR обратного хода в установленное состояние обратного хода.
Таким образом, движущая сила от выходного вала 2а двигателя 2 передается на первый основной входной вал 51 через второе сцепление С2, второй основной входной вал 52, пару зубчатых колес 56 повышения скорости, второй вспомогательный входной вал 54 и пару обратных зубчатых колес 69 и 70 обратного хода, и первый основной входной вал 51 вращается в обратном направлении. Кроме того, так же как и во время начала движения и движения на ступени первой скорости, ECU 8 управляет батареей 7 для подачи электроэнергии в статор 3b электродвигателя 3, для вращения вращающегося магнитного поля, генерируемого в статоре 3b в обратном направлении. Таким образом, планетарное зубчатое колесо 9р вращается в обратном направлении и, таким образом, водило 9с вращается в направлении обратного хода под действием движущей силы двигателя 2, для вращения солнечного зубчатого колеса 9s в направлении обратного хода, и движущей силы электродвигателя 3 для вращения кольцевого зубчатого колеса 9r в направлении обратного хода. Кроме того, в результате взаимного соединения с ними, оси 31 и 31 вращаются в направлении обратного хода, и ведущие колеса 4 и 4 вращаются в направлении обратного хода транспортного средства под действием движущей силы от двигателя 2, объединенной с движущей силой электродвигателя 3. Таким образом, устройство 50 силовой передачи выполнено с возможностью движения транспортного средства в направлении назад в режиме движения с помощью.
С другой стороны, если движущая сила от выходного вала 2а двигателя 2 будет увеличена, водило 9с вращается в обратном направлении, так, что при этом кольцевое зубчатое колесо 9r вращается в направлении вперед. В результате взаимного соединения при вращении в обратном направлении водила 9с, оси 31 и 31 вращаются в обратном направлении. В это время кольцевое зубчатое колесо 9r вращается в направлении вперед, и поэтому электродвигатель 3 выполняет регенеративную операцию, и батарея 7 заряжается. Таким образом, в то время как электродвигатель 3 выполняет регенеративную операцию, ведущие колеса 4 и 4 вращаются в обратном направлении транспортного средства только от движущей силы двигателя 2. Таким образом, устройство 50 силовой передачи выполнено с возможностью движения транспортного средства назад в режиме регенеративного движения.
Поэтому устройство 50 силовой передачи выполнено с возможностью движения транспортного средства назад в разных режимах движения, а именно в режиме движения с помощью и в режиме регенеративного движения. В результате, устройство 50 силовой передачи выполнено с возможностью правильного использования режима движения при движении в направлении назад, в соответствии с запрашиваемой мощностью, уровнем заряда батареи 7 и т.п.
Режим работы двигателя, ступень второй скорости
На фиг.12 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени второй скорости в режиме движения от двигателя. На ступени второй скорости в режиме движения от двигателя ECU 8 устанавливает второе сцепление С2 в состояние "включено", первый синхронизатор S1 и синхронизатор SR обратного хода в нейтральное состояние, и второй синхронизатор S2 в установленное состояние ступени второй скорости.
Таким образом, движущая сила с выходного вала 2а двигателя 2 передается на ведущие колеса 4 и 4 через второе сцепление С2, второй основной входной вал 52, пару зубчатых колес 56 повышения скорости, второй вспомогательный входной вал 54, пару 62 зубчатых колес второй скорости, выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной зубчатой передачи и оси 31 и 31. В это время водило 9с вращается в направлении вперед вместе с выходным валом 57, но солнечное зубчатое колесо 9s и кольцевое зубчатое колесо 9r не принимают движущую силу. Поэтому солнечное зубчатое колесо 9s совместно вращается с планетарной зубчатой передачей 9р и, таким образом, они вращаются в направлении вперед, кольцевое зубчатое колесо 9r не вращается, и электродвигатель 3 не выполняет ни одну из силовой операции и регенеративной операции. Таким образом, ведущие колеса 4 и 4 вращаются в направлении движения вперед транспортного средства в состоянии движения вперед на ступени второй скорости только от движущей силы двигателя 2. Кроме того, первый основной входной вал 51 вращается в направлении вперед вместе с солнечным зубчатым колесом 9s, и движущую силу передают на входной вал 5а вспомогательного устройства 5 через пару зубчатых колес 55 замедления, первый вспомогательный входной вал 53, ременной механизм 71 и сцепление 33 вспомогательного устройства.
Режим работы HEV, ступень второй скорости
На фиг.13 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени второй скорости в режиме работы с помощью. На ступени второй скорости в режиме движения с помощью ECU 8 устанавливает второе сцепление С2 в состояние "включено", первый синхронизатор S1 и синхронизатор SR обратного хода в нейтральное состояние, и второй синхронизатор S2 в установленное состояние ступени второй скорости, и устанавливает электродвигатель 3 таким образом, чтобы обеспечить вращение ротора 3a в направлении вперед.
Таким образом, так же как и на ступени второй скорости в режиме движения от двигателя, движущую силу с выходного вала 2а двигателя 2 передают на ведущие колеса 4 и 4 через второе сцепление С2, второй основной входной вал 52, пару зубчатых колес 56 повышения скорости, второй вспомогательный входной вал 54, пару 62 зубчатых колес второй скорости, выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной передачи и оси 31 и 31. В это время водило 9с вращается в направлении вперед вместе с выходным валом 57, который вращается в направлении вперед под действием движущей силы от двигателя 2. С другой стороны, кольцевое зубчатое колесо 9r вращается в направлении вперед вместе с ротором 3а, и поэтому водило 9с также вращается в направлении вперед, принимая крутящий момент также от кольцевого зубчатого колеса 9r. Движущая сила, объединяемая на водиле 9с, передается на ведущие колеса 4 и 4 через выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной передачи и оси 31 и 31. Таким образом, комбинированная движущая сила двигателя 2 и электродвигателя 3 передается на ведущие колеса 4 и 4, и ведущие колеса 4 и 4 вращаются в направлении передвижения транспортного средства. Кроме того, если запрашиваемая мощность меньше, чем соответствующая рабочая мощность, или в других аналогичных случаях, также возможно вращать кольцевое зубчатое колесо 9r в обратном направлении, для обеспечения выполнения электродвигателем 3 регенеративной операции таким образом, что транспортное средство движется в регенеративном режиме движения на ступени второй скорости.
Переключение со ступени второй скорости в режиме движения двигателя на ступень второй скорости в режиме движения HEV возможно только при запуске в работу электродвигателя 3, и изменение на противоположное направление также возможно только в результате остановки работы электродвигателя 3, и, поэтому, оба переключения могут быть легко и быстро выполнены. Кроме того, становится возможным справиться с переключениями без переключения ступени переменной скорости в ответ на изменение запрашиваемой мощности. Следовательно, изменение запрашиваемой мощности может поглощаться при выполнении силовой операции и регенеративной операции электродвигателем 3 с соответствующим переключением между режимом движения с помощью и режимом регенеративного движения, в то время как двигатель 2 работает в соответствующей рабочей области, обеспечивая, таким образом, уменьшение потребляемого топлива двигателем 2.
Режим движения HEV, подготовка ступени второй скорости к переключению на ступень третьей скорости
На фиг.14 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени второй скорости при подготовке к переключению на ступень третьей скорости в режиме движения с помощью. Ступень второй скорости при подготовке на переключение на ступень третьей скорости представляет собой ступень с переменной скоростью для использования при выполнении движения на второй скорости, при подготовке к переключению передачи на или со ступени третьей скорости таким образом, что ступень второй скорости переключается на ступень третьей скорости, или ступень третьей скорости выполняет плавное переключение с понижением передачи на ступень второй скорости.
На ступени второй скорости при подготовке к переключению на ступень третьей скорости в режиме движения с помощью ECU 8 устанавливает второе сцепление С2 в состояние "включено", первый синхронизатор S1 в установленное состояние ступени третьей скорости, второй синхронизатор S2 в установленное состояние ступени второй скорости и синхронизатор SR обратного хода в нейтральное состояние, и устанавливает электродвигатель 3 так, чтобы обеспечить вращение ротора 3а в направлении вперед.
Это добавляет путь силовой передачи, через который крутящий момент вращения передает с первого основного входного вала 51, который вращается в направлении вперед, вместе с солнечным зубчатым колесом 9s, в направлении, в котором водило 9с вращается в направлении вперед через пару зубчатых колес 55 замедления, первый вспомогательный входной вал 53, пару 59 зубчатых колес третьей скорости, и выходной вал 57, в дополнение к пути силовой передачи на ступени второй скорости в режиме работы HEV. Движущая сила, пройдя через путь силовой передачи, комбинируется с движущей силой, передаваемой от двигателя 2 через второй основной входной вал 52, в результате чего водило 9с вращается в направлении вперед. Поэтому комбинированная движущая сила, также включающая в себя крутящий момент, генерируемая в результате вращения водила 9с, передается на ведущие колеса 4 и 4.
Режим движения HEV, ступень третьей скорости при подготовке к ступени второй скорости
На фиг.15 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени третьей скорости при подготовке к ступени второй скорости в режиме движения с помощью. Переключение со ступени второй скорости при подготовке к ступени третьей скорости в режиме движения HEV на ступень третьей скорости в режиме движения HEV выполняют путем перехода через ступень третьей скорости при подготовке к ступени второй скорости в режиме движения HEV. Ступень третьей скорости при подготовке к ступени второй скорости представляет собой ступень переменной скорости для использования при выполнении движения на третьей скорости, при подготовке к переключению передачи на или со ступени второй скорости таким образом, что выполняется плавное переключение со ступени третьей скорости вниз на ступень второй скорости, или переключение со ступени второй скорости вверх на ступень третьей скорости.
Когда выполняется переключение со ступени второй скорости, находящейся в процессе подготовки к ступени третьей скорости в режиме движения HEV, на ступень третьей скорости в состоянии подготовки к ступени второй скорости в режиме движения HEV, ECU 8 устанавливает первое сцепление С1 в состояние "включено" и устанавливает второе сцепление С2 в состояние "выключено".
Таким образом, движущая сила с выходного вала 2а двигателя 2 передается на ведущие колеса 4 и 4 через первое сцепление С1, первый основной входной вал 51, пару зубчатых колес 55 замедления, первый вспомогательный входной вал 53, пару 59 зубчатых колес третьей скорости, выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной зубчатой передачи и оси 31 и 31, и ведущие колеса 4 и 4 вращаются в направлении передвижения транспортного средства. На таком пути силовой передачи водило 9с вращается в направлении вперед, вместе с выходным валом 57, который вращается в направлении вперед от движущей силы двигателя 2, и солнечное зубчатое колесо 9s вращается в направлении вперед, вместе с первым основным входным валом 51 от движущей силы двигателя 2. Здесь скорость вращения водила 9с отличается от скорости вращения солнечного зубчатого колеса 9s, и поэтому кольцевое зубчатое колесо 9r вращается в направлении вперед или в направлении назад, в соответствии с разностью скорости вращения. Если кольцевое зубчатое колесо 9r вращается в направлении вперед, электродвигатель 3 выполняет силовую операцию. Если кольцевое зубчатое колесо 9r вращается в направлении обратного хода, электродвигатель 3 выполняет регенеративную операцию. Хотя второй вспомогательный входной вал 54 вращается вместе с вращением выходного вала 57, второй вспомогательный входной вал 54 не способствует объединению движущих сил.
Таким образом, переключение со ступени второй скорости при подготовке к ступени третьей скорости в режиме движения HEV на ступень третьей скорости при подготовке к ступени второй скорости в режиме движения HEV может быть выполнено только путем переключения соединенного состояния между первым сцеплением С1 и вторым сцеплением С2, и поэтому переключение может быть легко и быстро выполнено. Хотя это не показано, возможно установить ступень третьей скорости при подготовке к ступени четвертой скорости в режиме движения HEV, путем помещения второго синхронизатора S2 в установленное состояние ступени четвертой скорости.
Режим движения HEV, ступень третьей скорости
На фиг.16 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени третьей скорости в режиме движения с помощью. Когда ступень третьей скорости в состоянии подготовки к ступени второй скорости в режиме движения HEV переключается на ступень третьей скорости в режиме движения HEV, ECU 8 устанавливает второй синхронизатор S2 в нейтральное состояние. Как описано выше, второй вспомогательный входной вал 54 не способствует объединению движущих сил на ступени третьей скорости при подготовке к ступени второй скорости в режиме движения HEV. Поэтому, даже если второй вспомогательный входной вал 54 будет подключен к паре 62 зубчатых колес второй скорости 62, не происходит изменение пути силовой передачи.
Таким образом, изменение со ступени третьей скорости при подготовке к ступени второй скорости в режиме движения HEV на ступень третьей скорости в режиме движения HEV может быть выполнено только путем установки второго синхронизатора S2 в нейтральное состояние, и поэтому такое изменение может быть легко и быстро выполнено. Кроме того, переключение между ступенью второй скорости и ступенью третьей скорости в режиме движения HEV может быть легко и быстро выполнено через ступень второй скорости при подготовке к ступени третьей скорости и ступени третьей скорости при подготовке к ступени второй скорости в режиме движения HEV.
Режим движения от двигателя, ступень четвертой скорости
На фиг.17 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени четвертой скорости в режиме движения от двигателя. На ступени четвертой скорости в режиме движения от двигателя ECU 8 устанавливает второе сцепление С2 в состояние "включено", первый синхронизатор S1 и синхронизатор SR обратного хода в нейтральное состояние, и второй синхронизатор S2 в установленное состояние ступени четвертой скорости.
Таким образом, движущая сила с выходного вала 2а двигателя 2 передается на ведущие колеса 4 и 4 через второе сцепление С2, второй основной входной вал 52, пару зубчатых колес 56 повышения скорости, второй вспомогательный входной вал 54, пару 63 зубчатых колес четвертой скорости, выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной передачи и оси 31 и 31. Таким образом, ведущие колеса 4 и 4 вращаются в направлении продвижения транспортного средства только, благодаря движущей силе от двигателя 2 в состоянии продвижения на ступени четвертой скорости. В это время водило 9с вращается в направлении вперед вместе с выходным валом 57, но солнечное зубчатое колесо 9s и кольцевое зубчатое колесо 9r не принимает движущую силу. Поэтому солнечное зубчатое колесо 9s вращается одновременно с планетарной зубчатой передачей 9p и, таким образом, вращается в направлении вперед, кольцевое зубчатое колесо 9r не вращается, и электродвигатель 3 не выполняет ни одну из силовой операции и регенеративной операции. Кроме того, первый основной входной вал 51 вращается в направлении вперед вместе с солнечным зубчатым колесом 9s, и движущую силу передают на входной вал 5а вспомогательного устройства 5 через пару зубчатых колес 55 замедления, первый вспомогательный входной вал 53, ременный механизм 71 и сцепление 33 вспомогательного устройства.
Режим движения HEV, ступень четвертой скорости при подготовке к ступени третьей скорости
На фиг.18 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени четвертой скорости при подготовке к ступени третьей скорости в режиме движения HEV. Переключение со ступени третьей скорости при подготовке к ступени четвертой скорости в режиме движения HEV на ступень четвертой скорости в режиме движения HEV выполняют через ступень четвертой скорости при подготовке к ступени третьей скорости в режиме движения HEV.
Когда ступень третьей скорости при подготовке к ступени четвертой скорости в режиме движения HEV меняют на ступень четвертой скорости при подготовке к ступени третьей скорости в режиме движения HEV, ECU 8 устанавливает первое сцепление С1 в состояние "выключено" и второе сцепление С2 в состояние "включено".
Таким образом, движущая сила с выходного вала 2а двигателя 2 передается на ведущие колеса 4 и 4 через второе сцепление С2, второй основной входной вал 52, пару зубчатых колес 56 повышения скорости, второй вспомогательный входной вал 54, пару 63 зубчатых колес четвертной скорости, выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной передачи и оси 31 и 31, и ведущие колеса 4 и 4 вращаются в направлении передвижения транспортного средства. Таким же образом, как на ступени четвертой скорости при подготовке к ступени третьей скорости в режиме движения HEV, кольцевое зубчатое колесо 9r вращается в направлении вперед или в обратном направлении в соответствии с разностью скорости вращения между водилом 9с и солнечным зубчатым колесом 9s. Если кольцевое зубчатое колесо 9r вращается в направлении вперед, электродвигатель 3 выполняет силовую операцию. Если кольцевое зубчатое колесо 9r вращается в обратном направлении, электродвигатель 3 выполняет регенеративную операцию. Хотя первый вспомогательный входной вал 53 вращается вместе с вращением выходного вала 57, первый вспомогательный входной вал 53 не способствует объединению движущих сил.
Таким образом, изменение со ступени третьей скорости при подготовке к ступени четвертой скорости в режиме движения HEV на ступень четвертой скорости при подготовке к третьей скорости в режиме движения HEV может быть выполнено только путем переключения соединенного состояния между первым сцеплением С1 и вторым сцеплением С2, и поэтому переключение может быть легко и быстро выполнено.
Режим движения HEV, ступень четвертой скорости
На фиг.19 иллюстрируется рабочее состояние устройства 50 силовой передачи на ступени четвертой скорости в режиме движения с помощью. На ступени четвертой скорости в режиме движения с помощью ECU 8 устанавливает второе сцепление С2 в состояние "включено", первый синхронизатор S1 и SR синхронизатора обратного хода в нейтральное состояние, и второй синхронизатор S2 в установленное состояние ступени четвертой скорости, и устанавливает электродвигатель 3 так, чтобы ротор 3а вращался в направлении вперед.
Таким образом, движущую силу от выходного вала 2а двигателя 2 передают к ведущим колесам 4 и 4 через второе сцепление С2, второй основной входной вал 52, пару повышающих скорость зубчатых колес 56, второй вспомогательный входной вал 54, пара 63 зубчатых колес четвертой скорости, выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной передачи и оси 31 и 31. В это время, используя тот же подход, который касается второго этапа скорости в режиме движения с помощью, комбинированную движущую силу двигателя 2 и электродвигателя 3 передают к ведущим колесам 4 и 4. Кроме того, если запрашиваемая мощность меньше, чем соответствующая мощность работы, или в других аналогичных случаях, кольцевое зубчатое колесо 9r также может вращаться в обратном направлении, чтобы обеспечить выполнение электродвигателем 3 регенеративной операции так, чтобы транспортное средство двигалось в регенеративном режиме движения на ступени второй скорости.
Переключение со ступени четвертой скорости в режиме движения от двигателя на ступень четвертой скорости в режиме движения с помощью возможно только путем управления электродвигателем 3 таким образом, чтобы ротор 3а вращался в направлении вперед, и изменение на противоположное направление также возможно только в результате остановки работы электродвигателя 3, и поэтому оба переключения могут быть легко и быстро выполнены. Кроме того, возможно выполнить переключение без изменения ступени переменной скорости в ответ на изменение запрашиваемой мощности. Следовательно, вариации запрашиваемой мощности могут поглощаться путем выполнения силовой операции и регенеративной операции электродвигателя 3 с соответствующим переключением между режимом движения с помощью и режимом регенеративного движения, в то время как двигатель 2 работает в соответствующем рабочем диапазоне, обеспечивая, таким образом, снижение потребляемого топлива двигателем 2.
Режим движения HEV, ступень четвертой скорости при подготовке к ступени пятой скорости
На фиг.20 показано состояние работы устройства силовой передачи 50 на ступени четвертой скорости при подготовке к ступени пятой скорости в режиме движения с помощью. На ступени четвертой скорости при подготовке к ступени пятой скорости в режиме движения с помощью, ECU 8 устанавливает второе сцепление С2 в состояние "ВКЛЮЧЕНО", первый синхронизатор S1 в установленное состояние ступени пятой скорости, второй синхронизатор S2 в установленное состояние ступени четвертой скорости и синхронизатора SR обратного хода в нейтральное состояние, и устанавливает электродвигатель 3 так, чтобы обеспечить вращение ротора 3а в прямом направлении.
Это добавляет путь силовой передачи, через который крутящий момент вращения передают от первого основного входного вала 51, который вращается в прямом направлении наряду с солнечным зубчатым колесом 9s, в направлении, в котором водило 9с вращается в прямом направлении через пару понижающих зубчатых колес 55, первый вспомогательный входной вал 53, пару 60 зубчатых колес пятой скорости и выходной вал 57, в дополнение к пути силовой передачи на ступени второй скорости в режиме движения с помощью. Движущая сила после прохода через путь силовой передачи объединяется с движущей силой, переданной от двигателя 2 через второй основной входной вал 52, в результате чего водило 9с вращается в прямом направлении. Поэтому комбинированная движущая сила, также включающая в себя крутящий момент вращения, генерируемый вращением водила 9с, передается к ведущим колесам 4 и 4.
Режим движения HEV, ступень пятой скорости при подготовке к ступени четвертой скорости
На фиг.21 показано состояние работы устройства силовой передачи 50 на ступени пятой скорости при подготовке к ступени четвертой скорости в режиме движения с помощью. Переход с четвертого этапа скорости при подготовке к ступени пятой скорости в режиме движения HEV на ступень пятой скорости в режиме движения HEV выполняют, проходя через ступень пятой скорости при подготовке к ступени четвертой скорости в режиме движения HEV.
Когда режим движения на ступени четвертой скорости при подготовке к ступени пятой скорости в режиме движения HEV изменяют на ступень пятой скорости при подготовке к ступени четвертой скорости в режиме движения HEV, ECU 8 устанавливает первое сцепление С1 в состояние "ВКЛЮЧЕНО" и устанавливает второе сцепление С2 в состояние "ВЫКЛЮЧЕНО".
Таким образом, движущую силу от выходного вала 2а двигателя 2 передают к ведущим колесам 4 и 4 через первое сцепление С1, первый основной входной вал 51, пару понижающих зубчатых колес 55, первый вспомогательный входной вал 53, пару 60 зубчатых колес пятой скорости, выходной вал 57, пара 65 обратных зубчатых колес, обратный вал 64, модуль 30 дифференциальной передачи, оси 31 и 31, и ведущие колеса 4 и 4 вращаются в направлении движения транспортного средства. Кроме того, при том же подходе, как и для ступени третьей скорости при подготовке к ступени второй скорости в режиме движения HEV, кольцевое зубчатое колесо 9r вращается в прямом направлении или в обратном направлении в соответствии с разностью скорости вращения между водилом 9c и солнечным зубчатым колесом 9s. Если кольцевое зубчатое колесо 9r вращается в прямом направлении, электродвигатель 3 выполняет силовую операцию. Если кольцевое зубчатое колесо 9r вращается в обратном направлении, электродвигатель 3 выполняет регенеративную операцию. Хотя вторые вспомогательный входной вал 54, вращается вместе с вращением выходного вала 57, второй вспомогательный входной вал 54 не способствует комбинации движущих сил.
Таким образом, переключение со ступени четвертой скорости при подготовке к ступени пятой скорости в режиме движения HEV на ступень пятой скорости при подготовке к ступени четвертой скорости в режиме движения HEV может быть выполнено только путем переключения соединенного состояния между первым сцеплением С1 и вторым сцеплением С2, и поэтому такое переключение может быть легко и быстро выполнено.
Режим движения HEV, ступень пятой скорости
На фиг.22 показано состояние работы устройства силовой передачи 50 на ступени пятой скорости в режиме движения с помощью. Когда ступень пятой скорости при подготовке к ступени четвертой скорости в режиме движения HEV изменяют на ступень пятой скорости в режиме движения HEV, ECU 8 устанавливает второй синхронизатор S2 в нейтральное состояние. Как описано выше, второй вспомогательный входной вал 54, не способствует объединению движущих сил на ступени пятой скорости при подготовке к ступени четвертой скорости в режиме движения HEV. Поэтому, даже если второй вспомогательный входной вал 54 соединен с парой 63 зубчатых колес четвертой скорости, на пути силовой передачи не происходит никакого изменения.
Таким образом, изменение со ступени пятой скорости при подготовке к ступени четвертой скорости в режиме движения HEV на ступень пятой скорости HEV, становится возможным выполнить только, устанавливая второй синхронизатор S2 в нейтральное состояние, и поэтому изменение состояния может быть легко и быстро выполнено. Кроме того, изменение между четвертым этапом скорости и пятым этапом скорости в режиме движения HEV позволяет легко и быстро выполнять через ступень пятой скорости при подготовке к ступени пятой скорости и ступени пятой скорости при подготовке к ступени четвертой скорости в режиме движения HEV.
Режим движения EV, ступень третьей скорости
На фиг.23 показано рабочее состояние устройства силовой передачи 50 на ступени третьей скорости в режиме движения EV. На ступени третьей скорости в режиме движения EV ECU 8 устанавливает первое сцепление С1 и второе сцепление С2 в состояние "ВЫКЛЮЧЕНО", первый синхронизатор S1 установленное состояние ступени третьей скорости и второй синхронизатор S2 и обратный SR синхронизатор в нейтральное состояние, и устанавливает электродвигатель 3 так, чтобы обеспечить вращение ротора 3а в прямом направлении.
Таким образом, когда кольцевое зубчатое колесо 9r вращается в прямом направлении вместе с ротором 3а, водило 9c, которое принимает крутящий момент вращения от кольцевого зубчатого колеса 9r, начинает вращаться в прямом направлении. Кроме того, водило 9с соединено с солнечным зубчатым колесом 9s через выходной вал 57, парой 59 зубчатых колес третьей скорости, первым вспомогательным входным валом 53, парой 55 понижающих зубчатых колес и первым основным входным валом 51, и поэтому солнечное зубчатое колесо 9s начинает вращаться в прямом направлении. Таким образом, водило 9с вращается в прямом направлении, и крутящий момент его вращения передается на ведущие колеса 4 и 4 через выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной передачи и оси 31 и 31. Таким образом, ведущие колеса 4 и 4 вращаются в направлении движения вперед транспортного средства, только используя движущую силу электродвигателя 3. В это время выходной вал 2а двигателя 2 отсоединен от первого основного входного вала 51 и второго основного входного вала 52. Поэтому, в режиме движения EV, движущая сила не передается от электродвигателя 3 к выходному валу 2а двигателя 2, и таким образом двигатель 2 не может оставаться в движении.
Кроме того, хотя это не показано, двигатель 2 может быть запущен ECU 8 посредством установки первого сцепления С1 в состояние "ВКЛЮЧЕНО", когда транспортное средство движется на ступени третьей скорости в режиме движения EV. В это время выход движущей силы от выходного вала 2а двигателя 2 передают на ведущие колеса 4 и 4 через первое сцепление С1, первый основной входной вал 51, пару редукторов 55, первый вспомогательный входной вал 53, пару 59 зубчатых колес третьей скорости, выходной вал 57, пару обратных зубчатых колес 65, обратный вал 64, модуль 30 дифференциальной передачи и оси 31 и 31 и, кроме того, поступает на вход механизма 9 дифференциального вращения, как движущая сила для вращения солнечного зубчатого колеса 9s в прямом направлении через первый основной входной вал 51, и как движущая сила для вращения водила 9с в прямом направлении от первого вспомогательного входного вала 53 через пару 59 зубчатых колес третьей скорости и выходной вал 57. Таким образом, комбинированная движущая сила двигателя 2 и электродвигателя 3 передается на ведущие колеса 4 и 4, в результате чего устанавливается ступень третьей скорости в режиме движения с помощью.
Кроме того, двигатель 2 может быть запущен ECU 8 посредством установки первого сцепления С1 в состояние "включено" и установки второго синхронизатора S2 в установленное состояние ступени второй скорости или в установленное состояние ступени четвертой скорости, когда транспортное средство движется на ступени третьей скорости в режиме движения EV. В это время ступень третьей скорости при подготовке к ступени второй скорости или ступень третьей скорости при подготовке к ступени четвертой скорости установлена в режиме движения HEV.
Режим движения EV, ступень пятой скорости
На фиг.24 показано состояние работы устройства силовой передачи 50 на ступени пятой скорости в режиме движения EV. На ступени пятой скорости в режиме движения EV ECU 8 устанавливает первое сцепление С1 и второе сцепление С2 в состояние "ВЫКЛЮЧЕНО", первый синхронизатор S1 в установленное состояние ступени пятой скорости, и второй синхронизатор S2 и SR синхронизатор обратного хода в нейтральное состояние, и устанавливает электродвигатель 3 так, чтобы обеспечить вращение ротора 3а в прямом направлении. Таким образом, используя тот же подход как и для ступени третьей скорости в режиме движения EV, ведущие колеса 4 и 4 вращаются в направлении движения транспортного средства только благодаря движущей силе электродвигателя 3.
Кроме того, хотя это и не показано, двигатель 2 может быть запущен ECU 8 посредством установки первого сцепления С1 в состояние "ВКЛЮЧЕНО", во время движения транспортного средства на ступени пятой скорости в режиме движения EV. Таким образом, комбинированная движущая сила двигателя 2 и электродвигателя 3 будет передана на ведущие колеса 4 и 4, в результате чего устанавливается ступень пятой скорости в режиме движения с помощью.
Кроме того, двигатель 2 может быть запущен ECU 8 посредством установки первого сцепления С1 в состояние "ВКЛЮЧЕНО" и установки второго синхронизатора S2 в установленное состояние ступени четвертой скорости, когда транспортное средство движется на ступени пятой скорости в режиме движения EV. В это время установлена ступень пятой скорости при подготовке к ступени четвертой скорости в режиме движения с помощью.
Четвертый вариант осуществления
Устройство 80 силовой передачи для гибридного транспортного средства в соответствии с четвертым вариантом осуществления настоящего изобретения будет описано ниже со ссылкой на приложенные чертежи. Устройство 80 силовой передачи имеет только три ступени скоростей для движения вперед и одну ступень скорости для движения обратного хода, как ступени переменной скорости.
Как показано на фиг.25, в устройстве 80 силовой передачи установлено зубчатое колесо 53b третьей скорости, которое может быть подключено к первому, вспомогательному входному валу 53А через первый синхронизатор S1A на первом вспомогательном входном валу 53А, и установлено зубчатое колесо 54b второй скорости, которое может быть подключено ко второму, вспомогательному входному валу 54А через второй синхронизатор S2A на втором вспомогательном входном валу 54А.
Кроме того, первое зубчатое колесо 57а установлено на выходном валу 57А. Первое зубчатое колесо 57а совместно зацепляется с зубчатым колесом 53b третьей скорости и зубчатым колесом 54b второй скорости, составляя, таким образом, пару 59 зубчатых колес третьей скорости и пару 62 зубчатых колес второй скорости, соответственно. Кроме того, выходной вал 57А и второй вспомогательный входной вал 54А соединены друг с другом через цепочку 61А зубчатых колес скоростей с нечетными номерами.
Хотя устройство 80 силовой передачи не имеет ступени четвертой скорости и ступени пятой скорости, передача мощности других ступеней переменной скорости и т.п. будет такой же, как и в устройстве 50 силовой передачи, и поэтому ее описание здесь исключено. Устройство 80 силовой передачи имеет меньшее количество ступеней переменной скорости, чем в устройстве 50 силовой передачи, но позволяет уменьшать осевую длину выходного вала 2а двигателя 2 и достигать дополнительного уменьшения размеров, в результате чего устройство 80 силовой передачи может быть установлено в месте установки с малыми размерами.
Пятый вариант осуществления
Устройство 90 силовой передачи для гибридного транспортного средства в соответствии с пятым вариантом осуществления настоящего изобретения будет описано ниже со ссылкой на приложенные чертежи.
Как показано на фиг.26, устройство 90 силовой передачи, которое установлено на гибридном транспортном средстве, имеет двигатель 2 и электродвигатель 3, как источники генерирования электроэнергии, но не выполнено с возможностью привода вспомогательного устройства 5. Другими словами, устройство 90 силовой передачи не имеет вспомогательного устройства 5, ременного механизма 71 и сцепления 33 вспомогательного устройства по сравнению с устройством 50 силовой передачи.
В устройстве 90 силовой передачи, первый вспомогательный входной вал 53В не соединен с входным валом 5а вспомогательного устройства 5. Поэтому, даже если первый вспомогательный входной вал 53В вращается, движущая сила не будет передана на вспомогательное устройство 5. Передача мощности на другие элементы, кроме вспомогательного устройства 5, является такой же, как и в устройстве 50 силовой передачи, и поэтому описание ее здесь исключено.
Устройство силовой передачи в соответствии с настоящим изобретением не ограничивается описанным выше. Например, в каждом из вариантов осуществления был описан случай, когда первый основной входной вал 11, 11А или 51 соединен с солнечным зубчатым колесом 9s. Однако с солнечным зубчатым колесом 9s может быть соединен второй основной входной вал 12 или 52. Кроме того, был описан случай, в котором зубчатые колеса 18а, 18b, 18с, 53b и 53с для ступеней скоростей с нечетными номерами расположены на первых основных входных валах 11 и 11А и на первом вспомогательном входном валу 53, и зубчатые колеса 19а, 19b, 19с, 54b и 54с для ступеней скоростей с четными номерами расположены на вспомогательных входных валах 13 и 13А и на втором вспомогательном входном валу 54. Зубчатые колеса для ступеней скоростей с четными номерами, однако, могут быть расположены на первых основных входных валах 11 и 11А, и на первом вспомогательном входном валу 53, и зубчатые колеса для ступеней скоростей с нечетными номерами могут быть расположены на вспомогательных входных валах 13 и 13А на втором вспомогательном входном валу 54.
Кроме того, хотя выше был описан случай, когда механизм 9 дифференциального вращения сформирован, как модуль планетарной передачи, можно использовать другое дифференциальное устройство, кроме модуля планетарной передачи.
Кроме того, в первом и втором вариантах осуществления был описан случай, когда первый основной входной вал 11 или 11А и ротор 3а электродвигателя 3 соединены с солнечным зубчатым колесом 9s, зубчатое колесо 13а третьей скорости соединено с водилом 9с, и синхронизатор SL соединен с кольцевым зубчатым колесом 9r. Кроме того, в третьем - пятом вариантах осуществления был описан случай, когда первый основной входной вал 51 соединен с солнечным зубчатым колесом 9s, выходной вал 57 соединен с водилом 9с и ротор 3а электродвигателя соединен с кольцевым зубчатым колесом 9r. Эти соединения, однако, не ограничиваются этим и могут быть модифицированы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2544448C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2529575C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2518144C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657544C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2478043C1 |
| УПРАВЛЯЮЩИЙ БЛОК И СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2534146C2 |
| МОДУЛЬ И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2533954C2 |
| СИЛОВАЯ ПЕРЕДАЧА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2483941C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657625C1 |
| СИСТЕМА ПРИВОДА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2652858C1 |
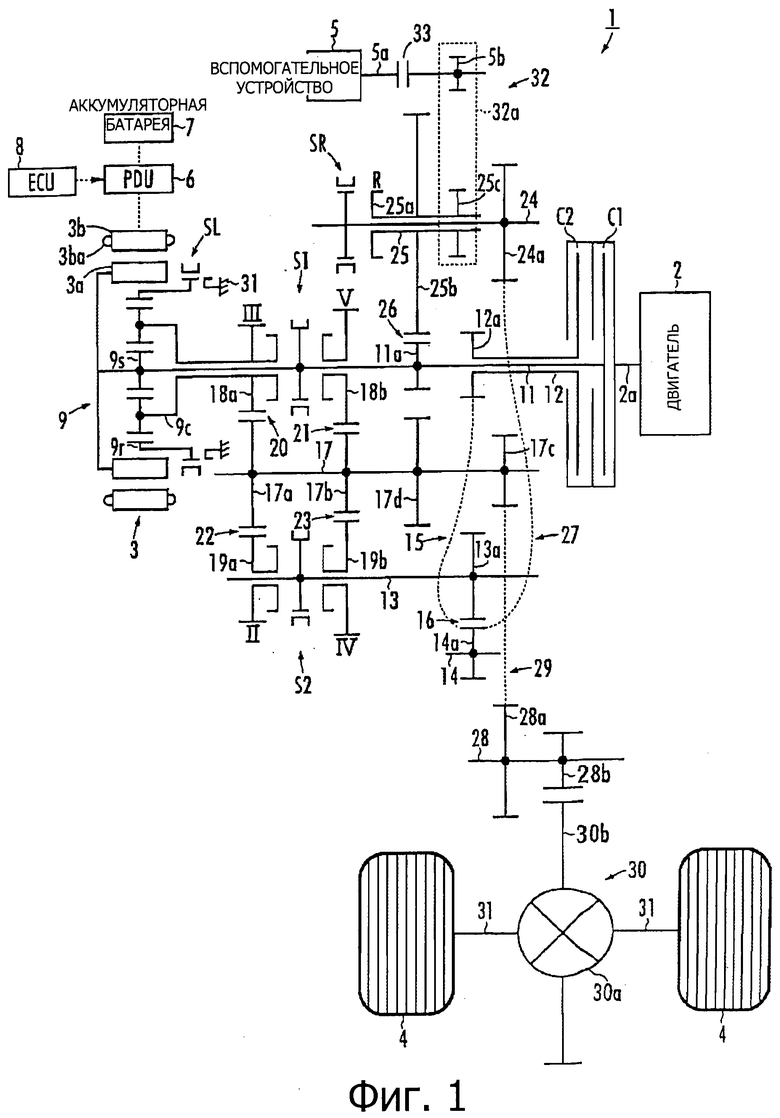
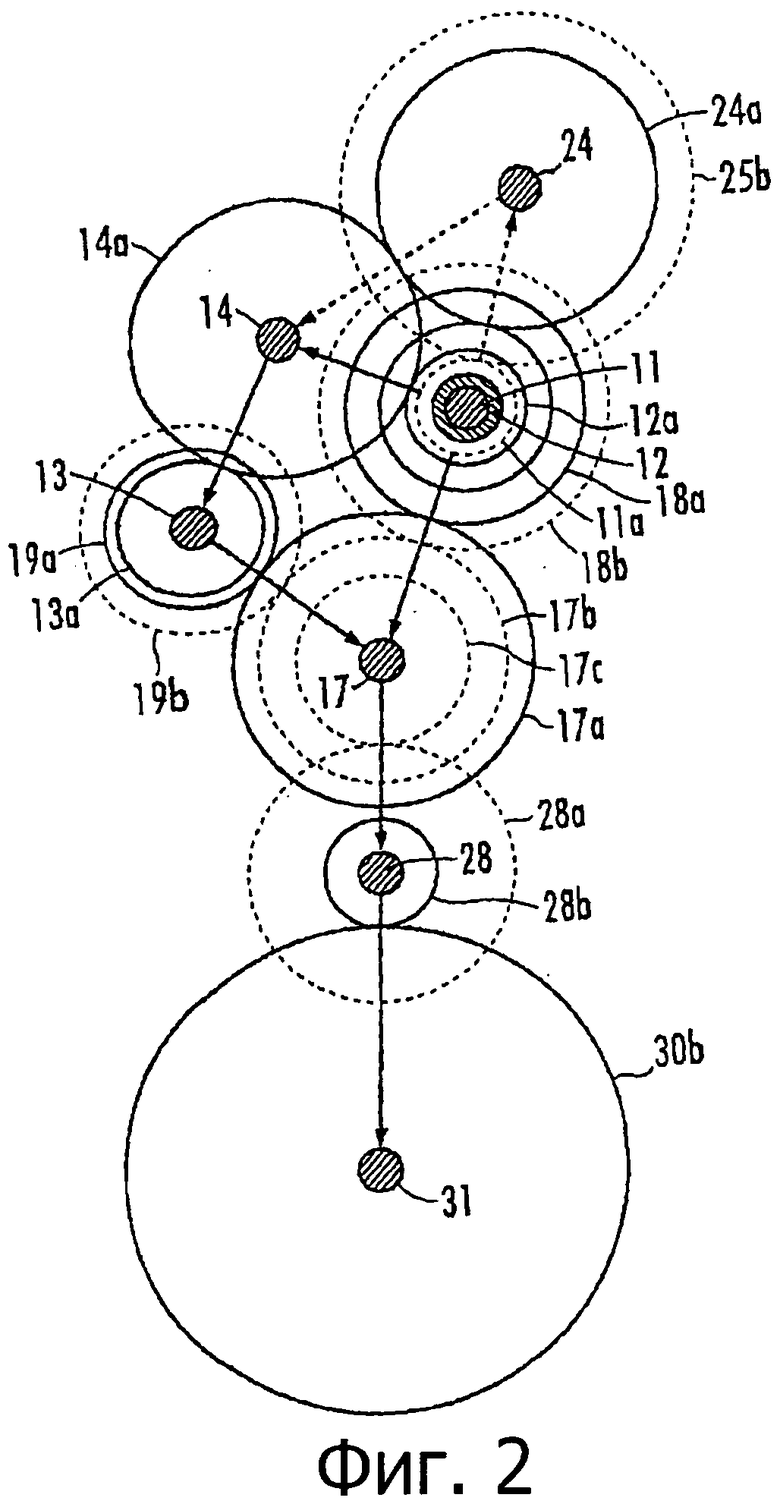
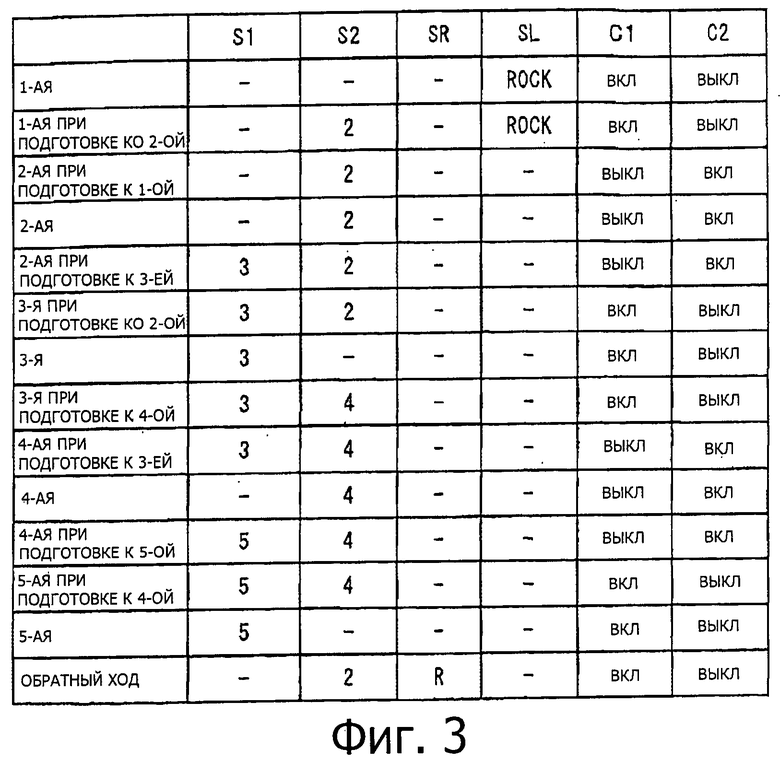
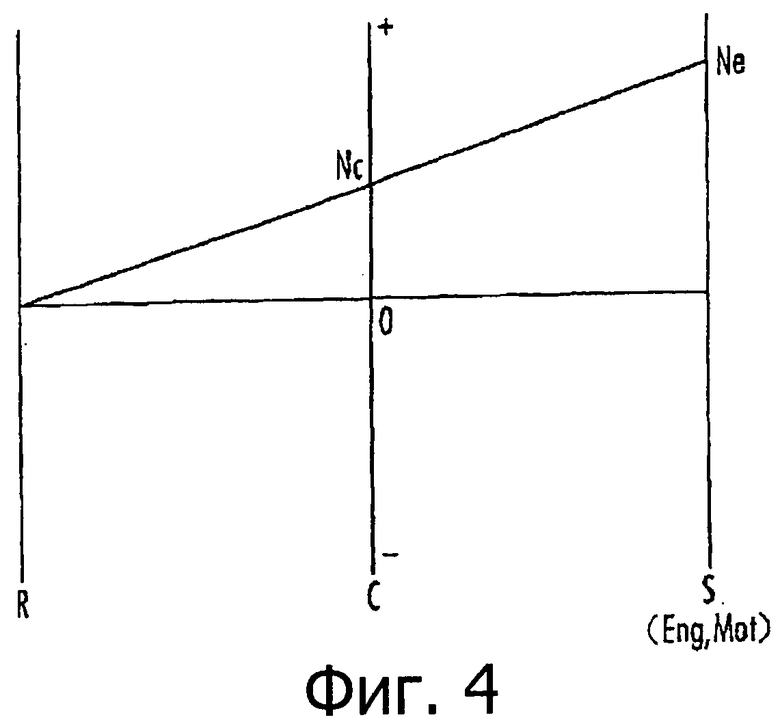
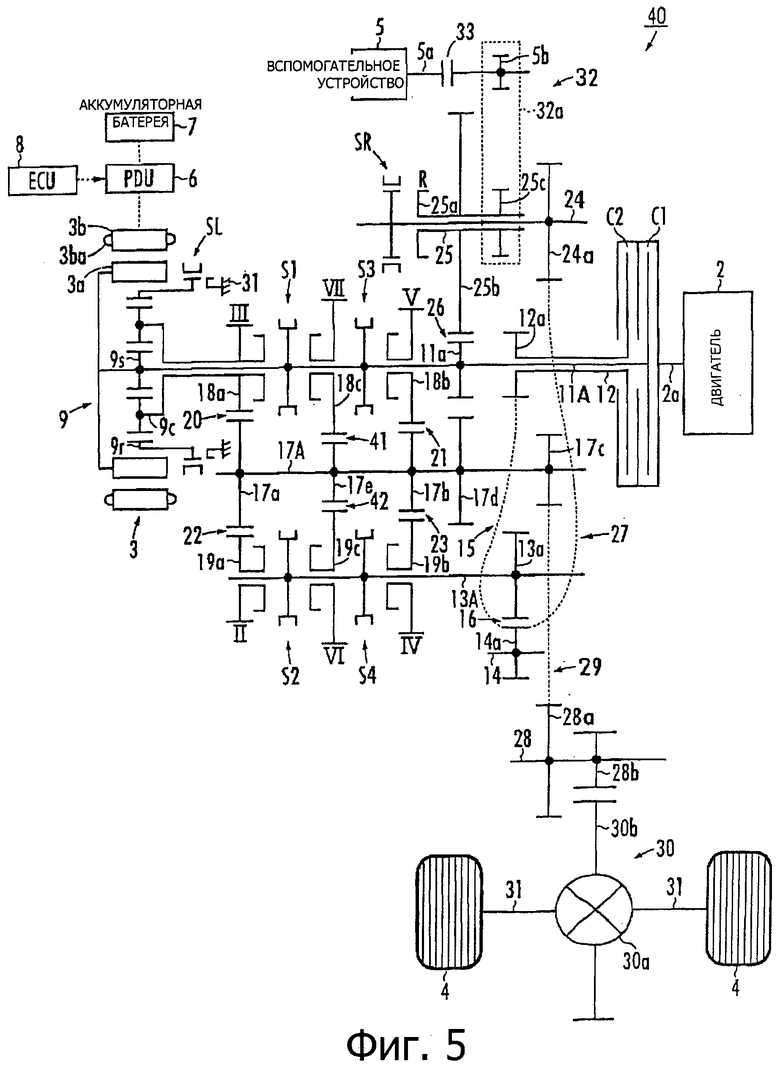
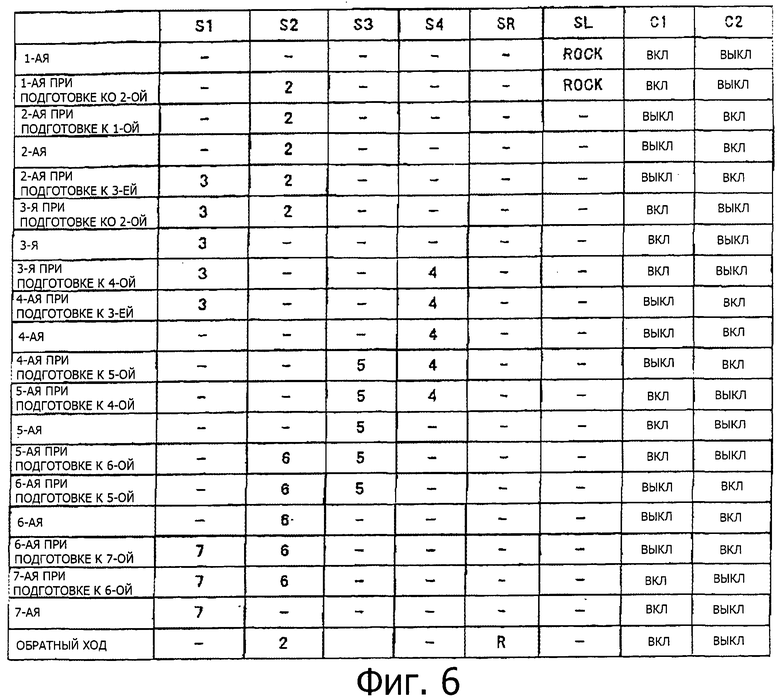
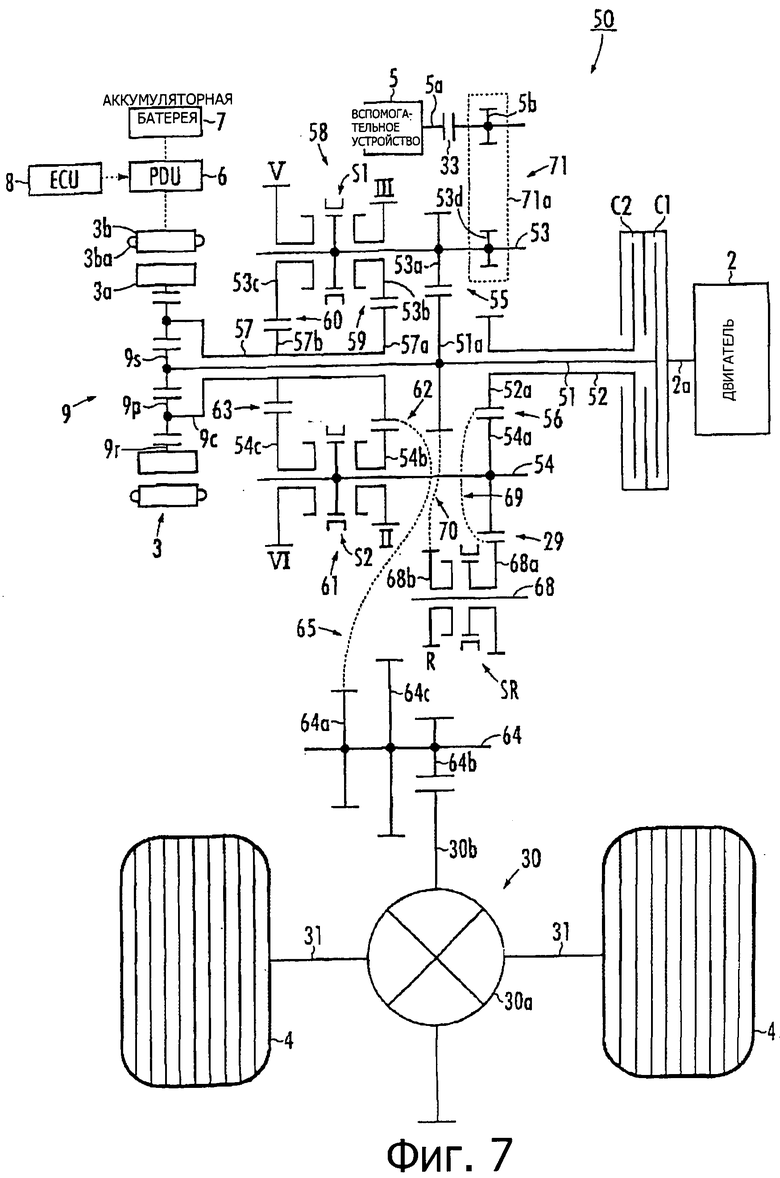

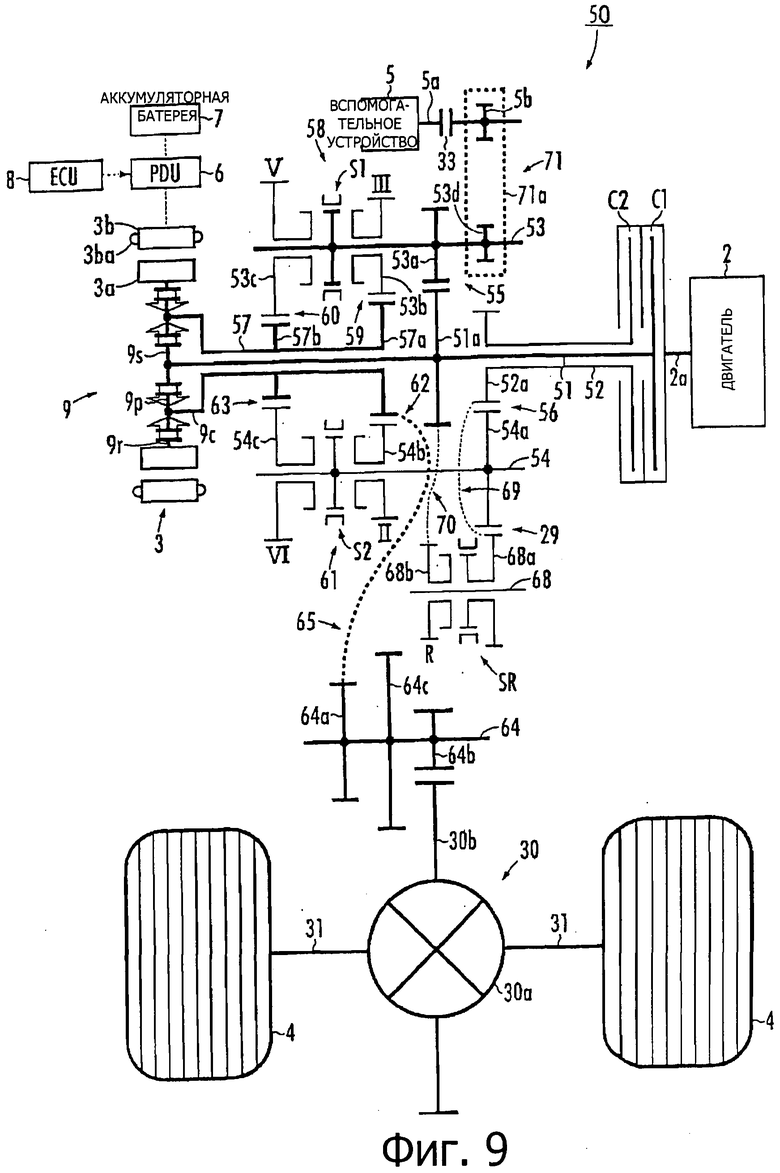

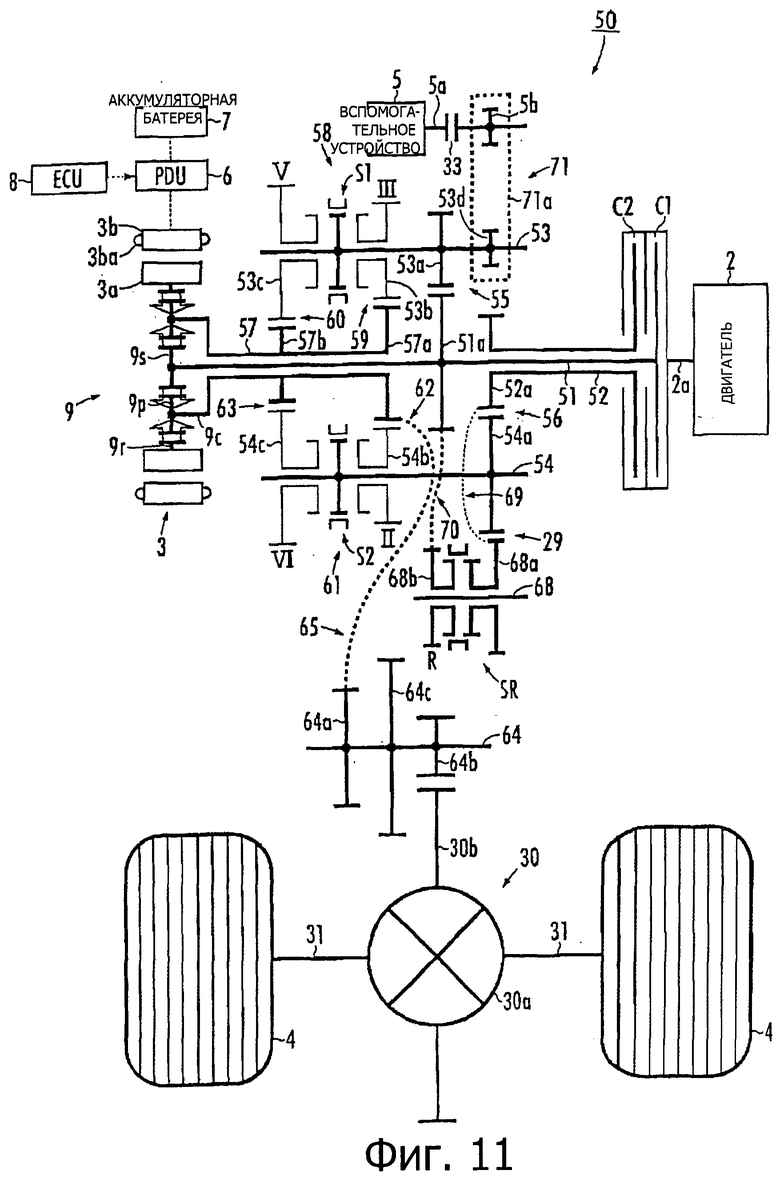
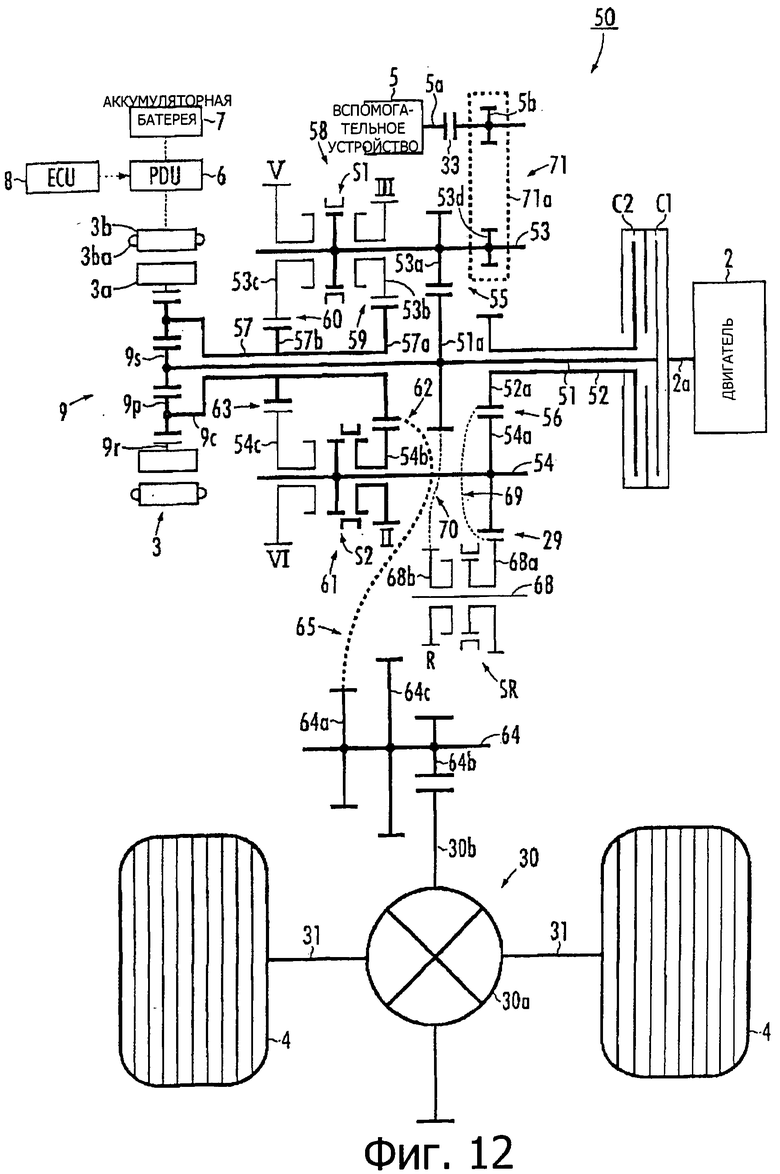
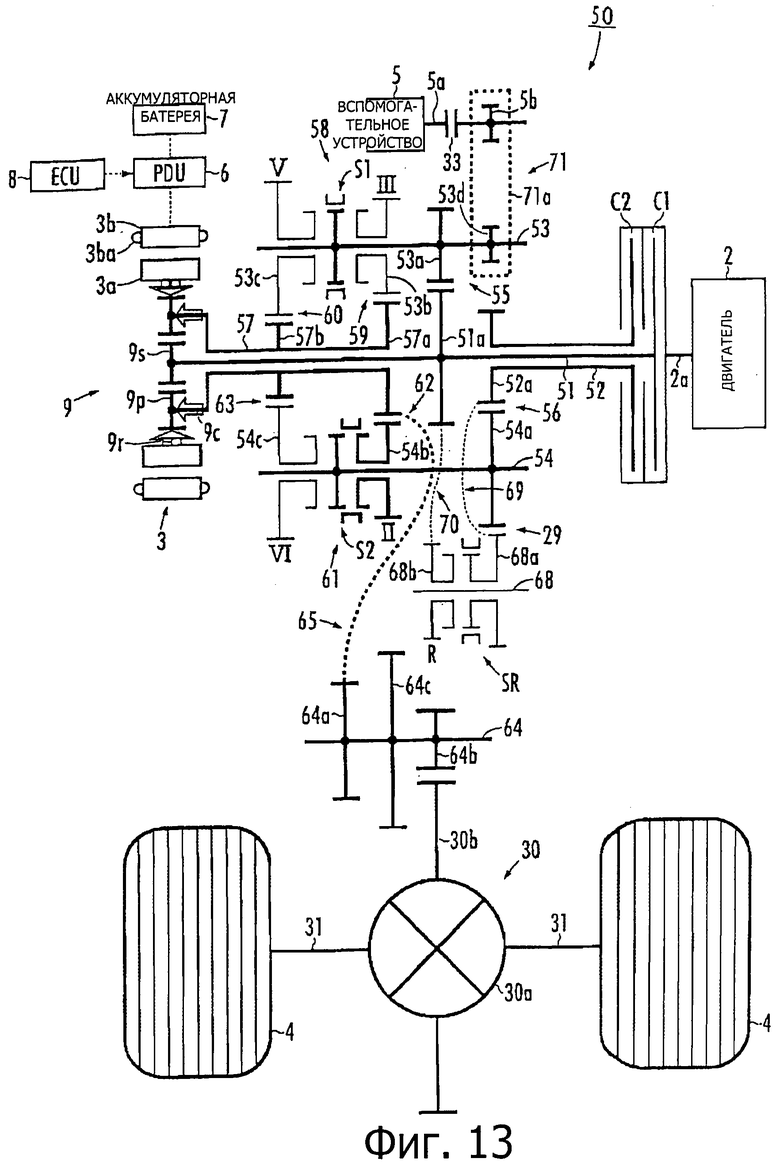
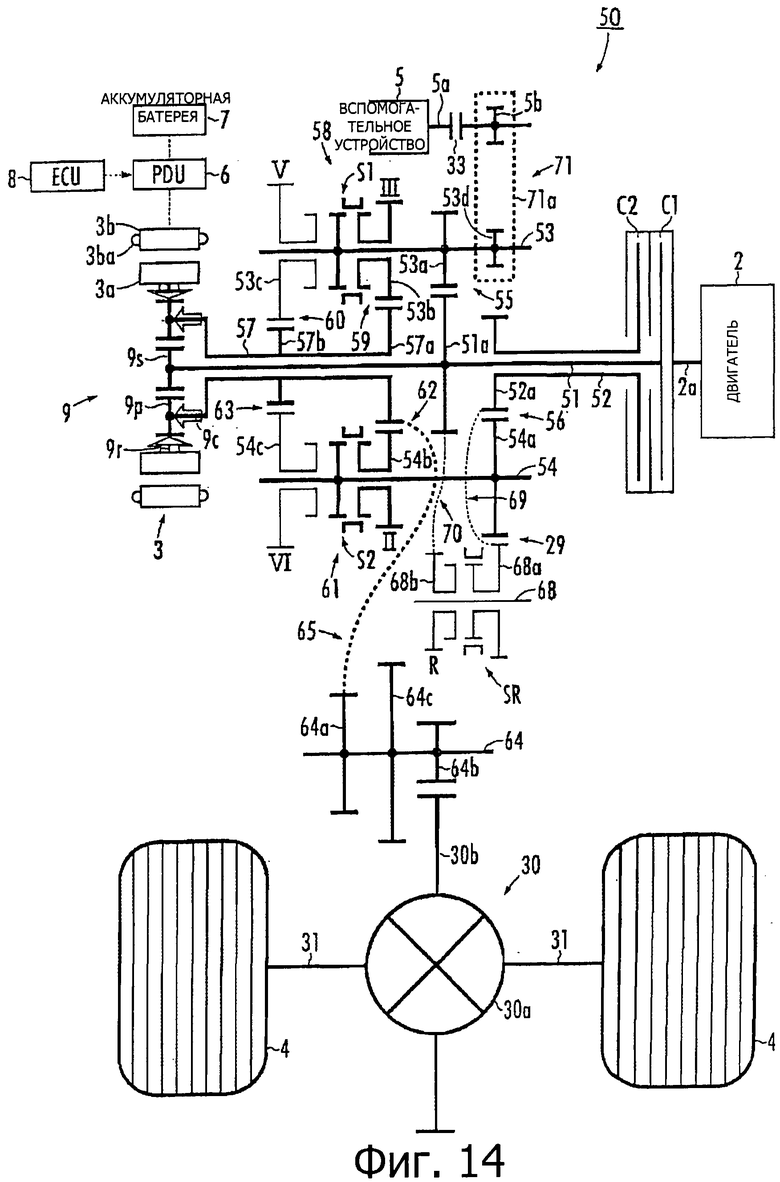
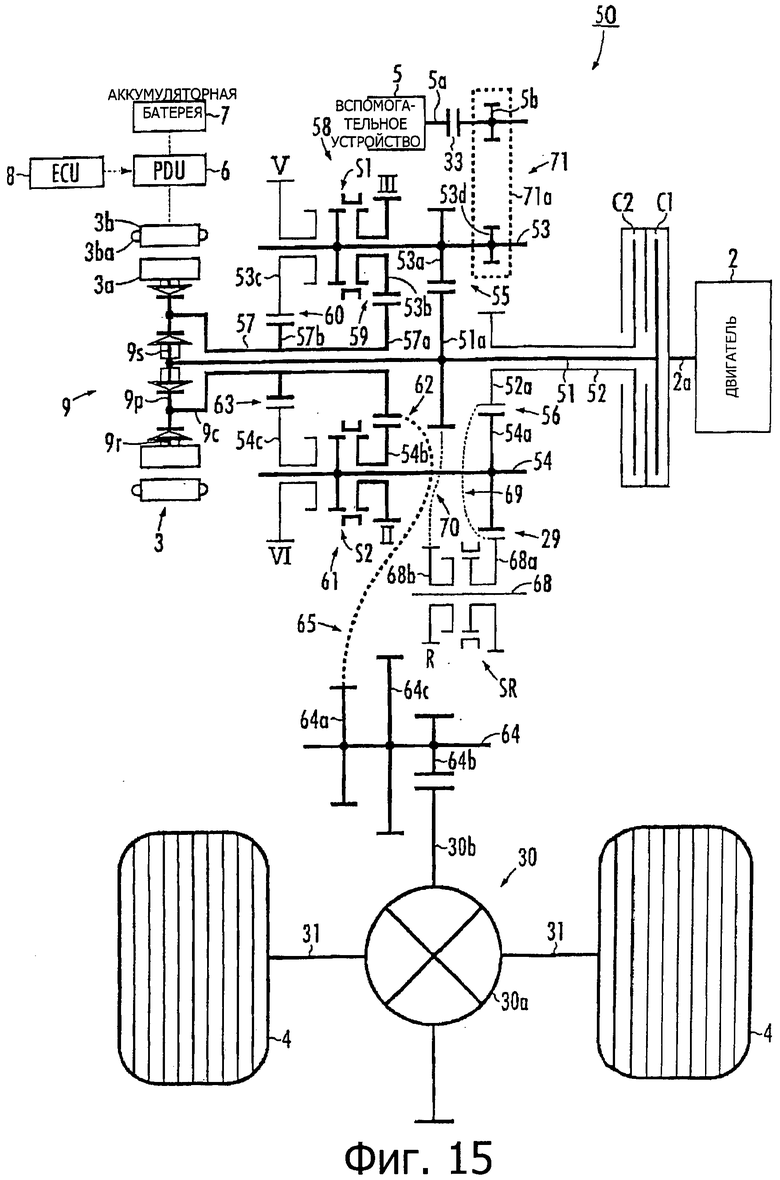
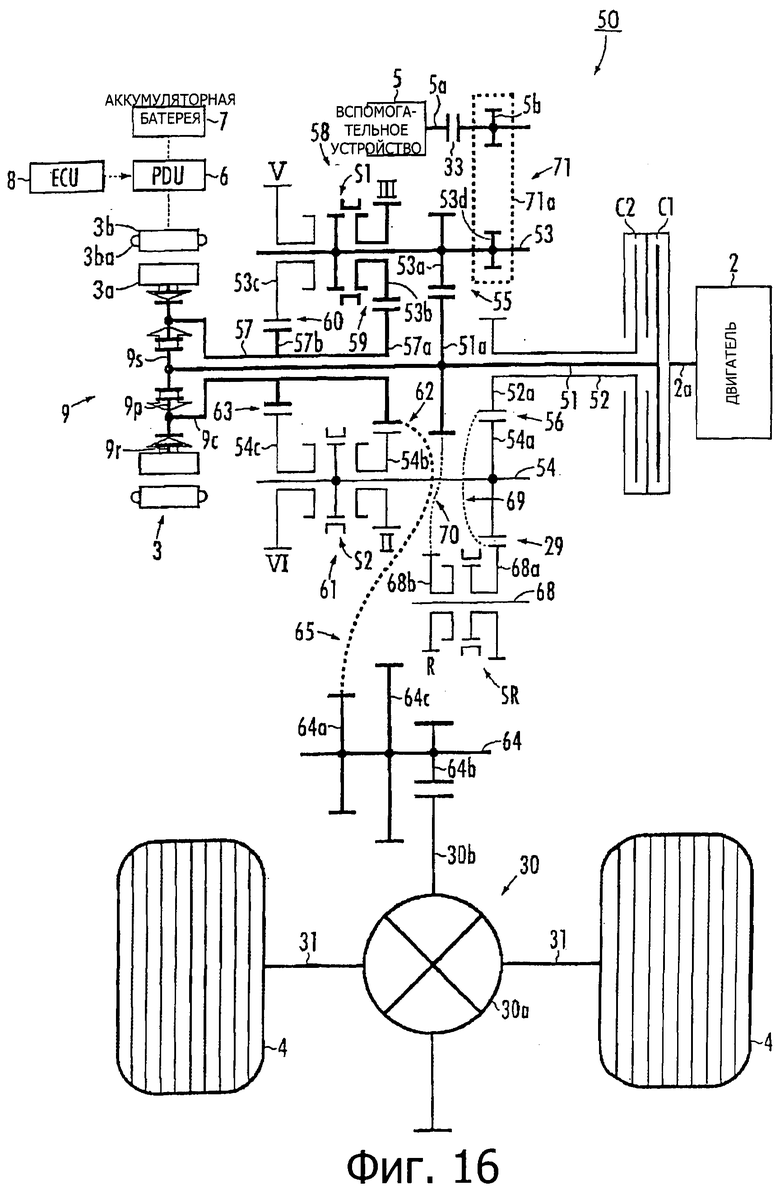

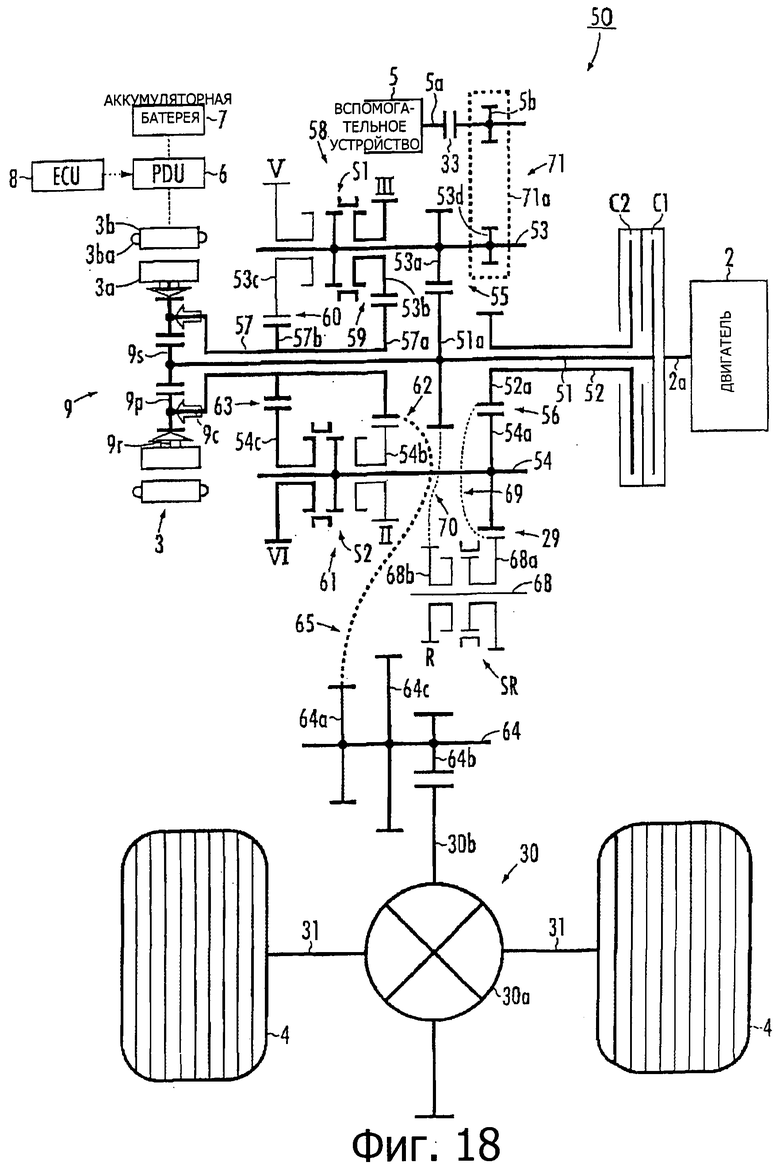
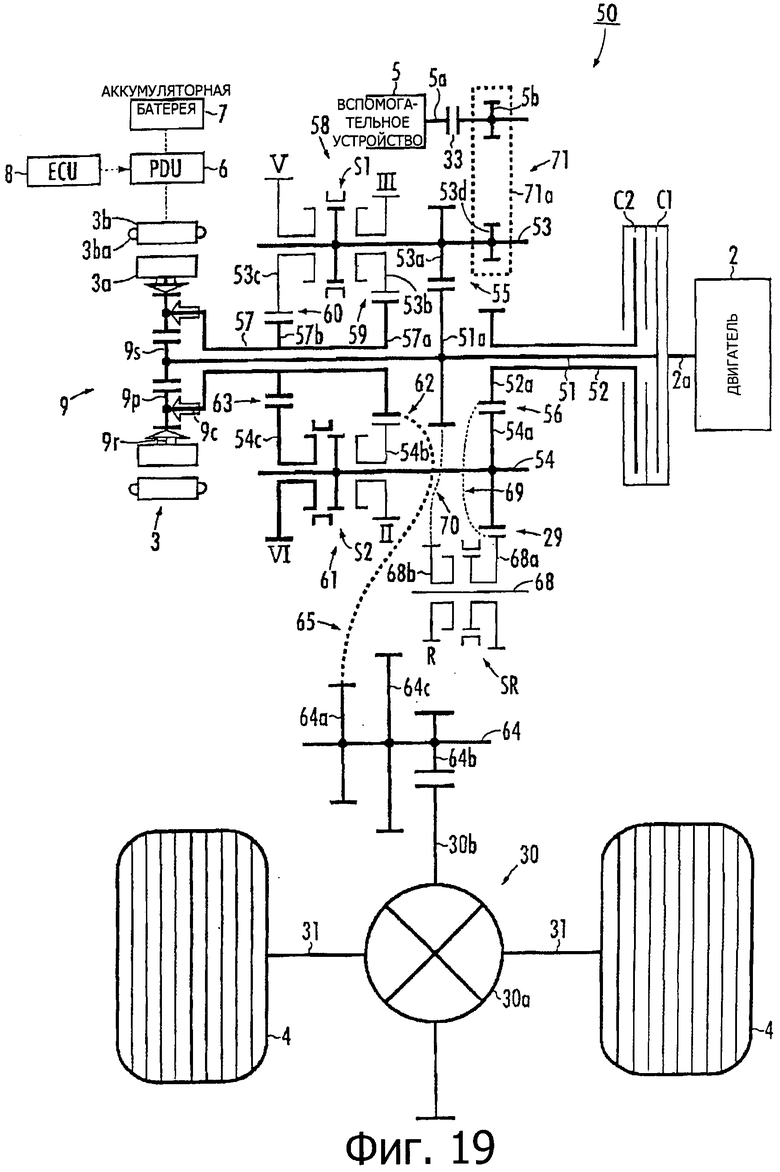
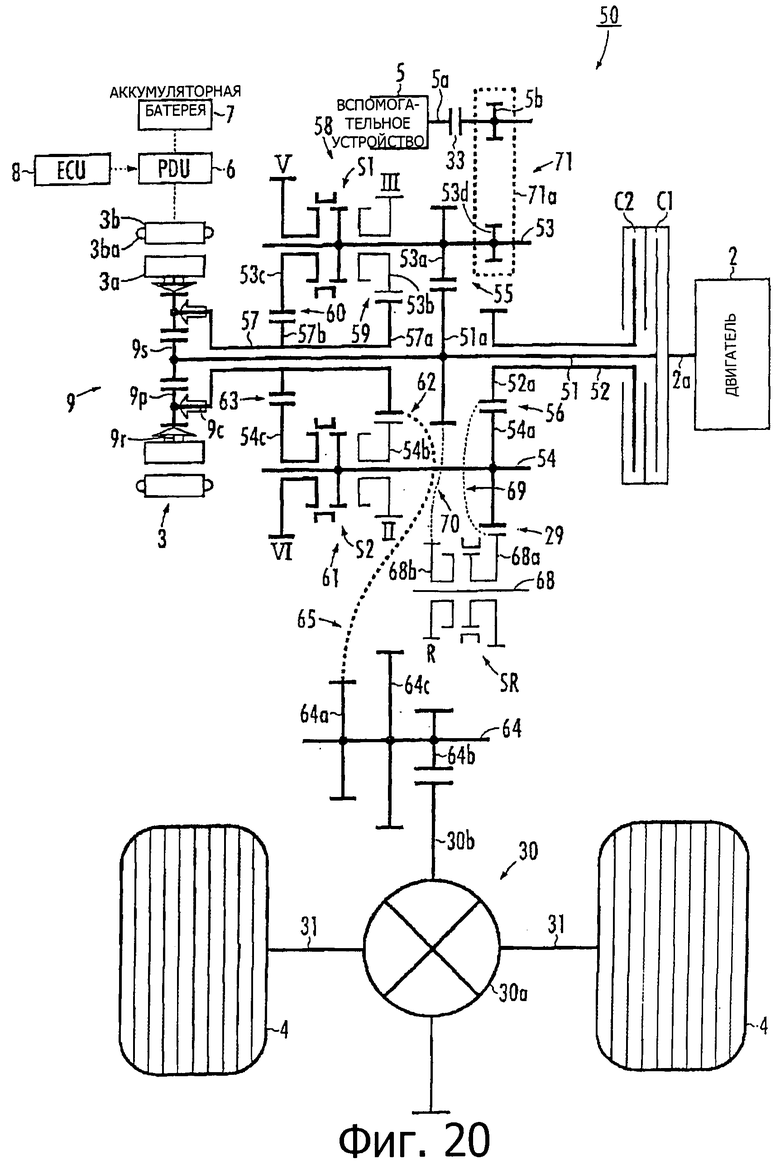
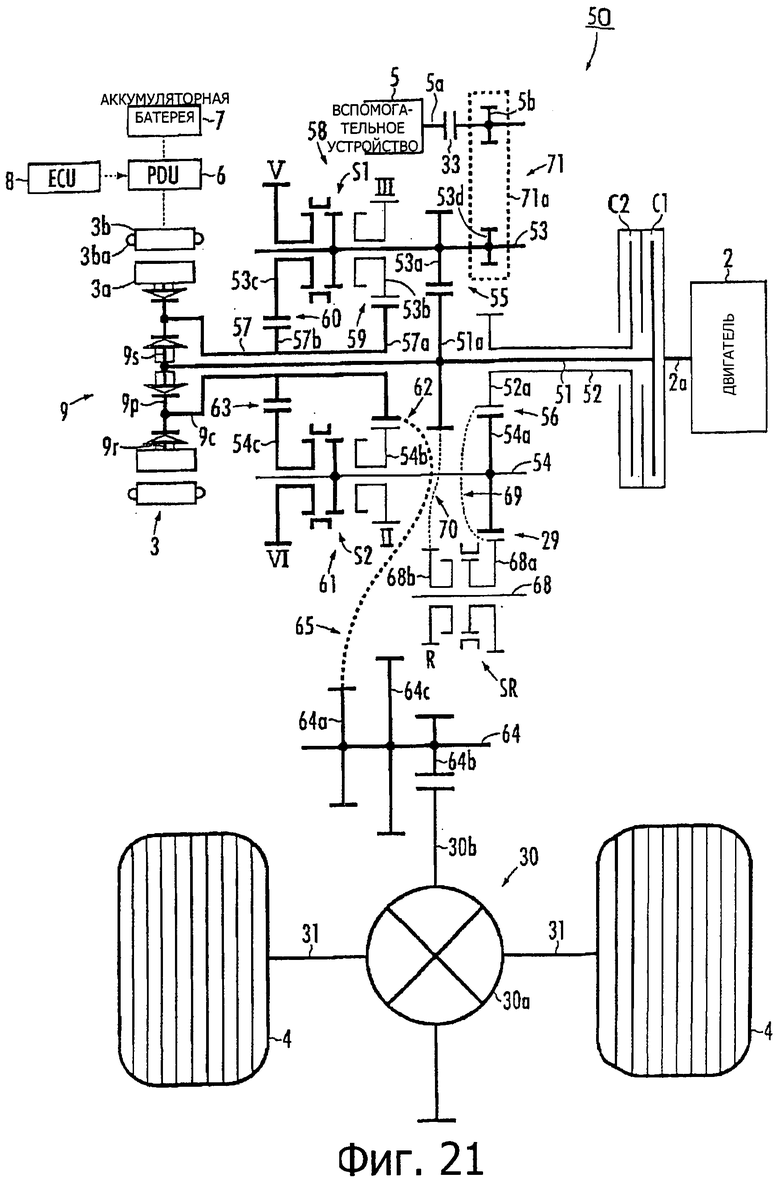


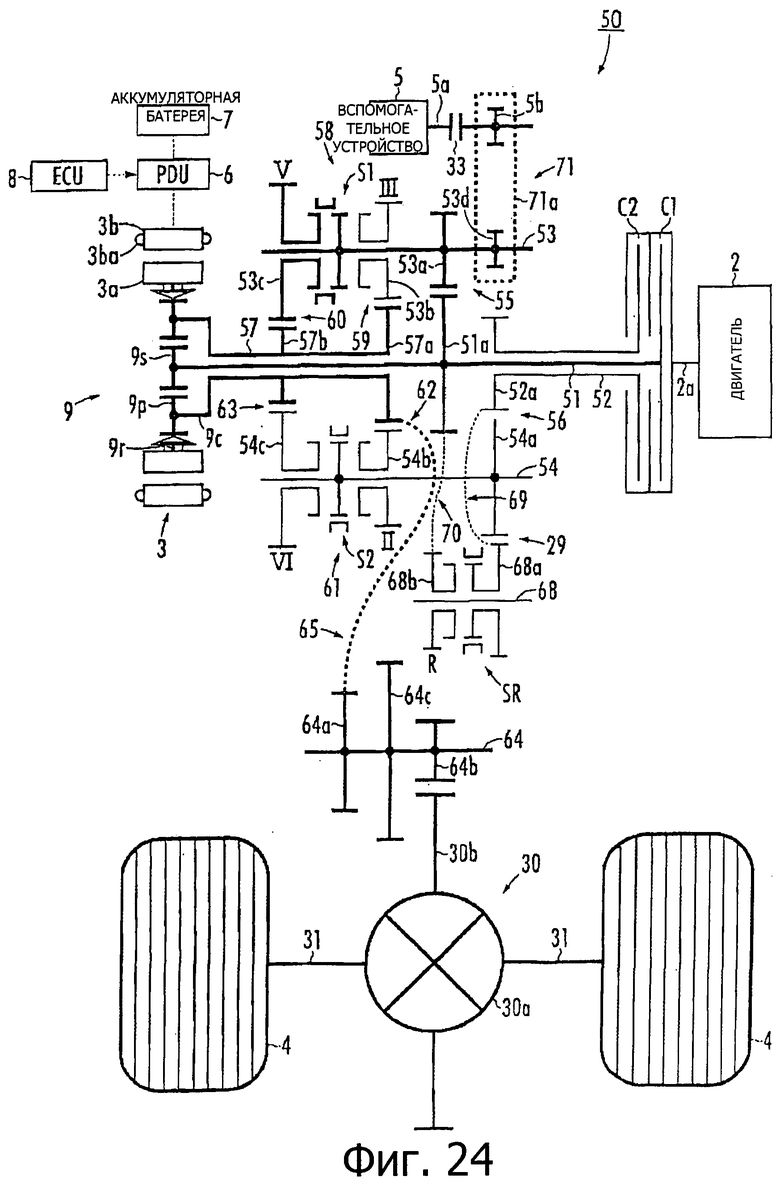
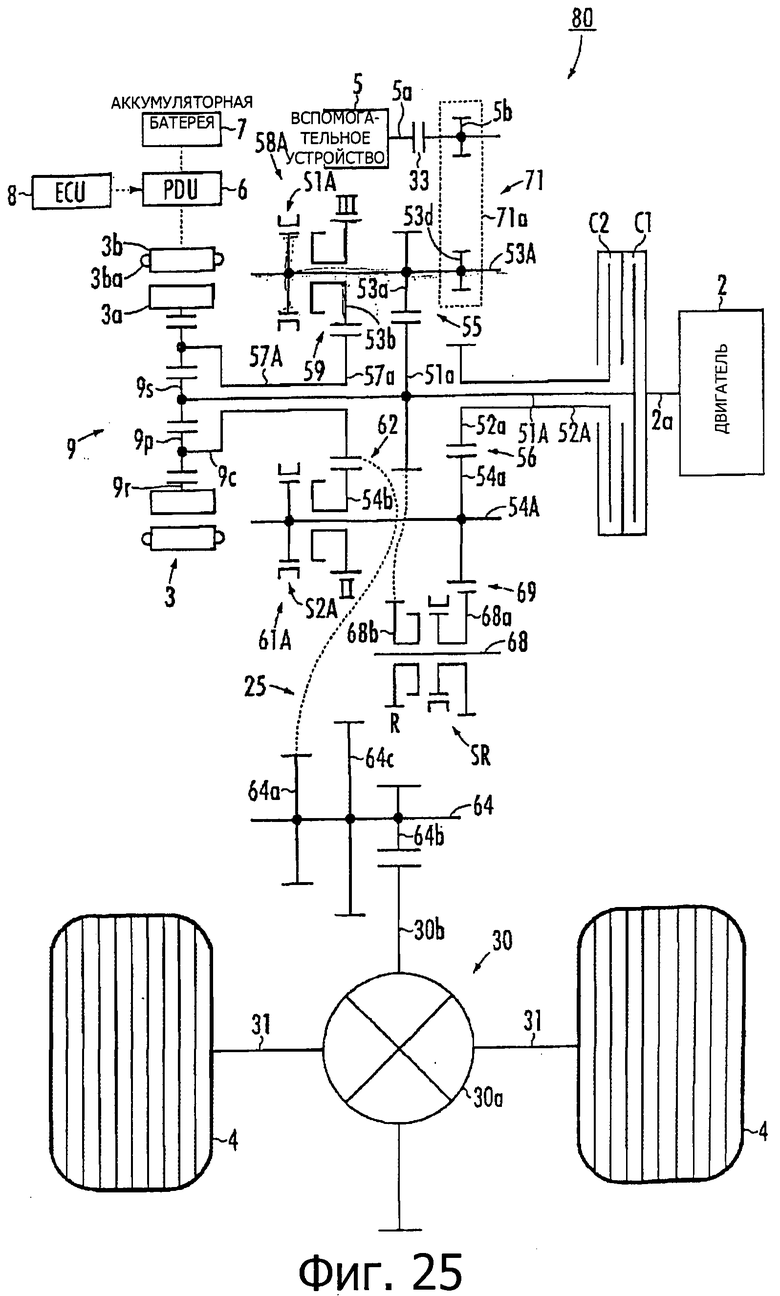

Группа изобретений относится к устройству силовой передачи для гибридного транспортного средства. Силовая передача по первому и второму вариантам содержит первый основной входной вал, вспомогательный входной вал, выходной вал, группу первых зубчатых колес, группу вторых зубчатых колес, группу третьих зубчатых колес, механизм дифференциального вращения. Механизм дифференциального вращения состоит из первого, второго и третьего вращающихся элементов. В силовой передаче по первому варианту первый вращающийся элемент соединен с первым основным входным валом и электродвигателем. Второй вращающийся элемент соединен с группой первых зубчатых колес. Третий вращающийся элемент соединен с фиксирующим механизмом. Фиксирующий механизм устанавливает третий вращающийся элемент в фиксированное состояние. В силовой передаче по второму варианту один из вспомогательных входных валов соединен с первым вращающимся элементом, а другой передает движущую силу на выходной вал, не используя механизм дифференциального вращения. Первый вращающийся элемент соединен с основным входным валом. Третий вращающийся элемент соединен с электродвигателем. Второй вращающийся элемент объединяет движущую силу первого и третьего вращающихся элементов и передает комбинированную движущую силу на выходной вал. Технический результат заключается в уменьшении осевой длины силовой передачи. 2 н. и 11 з.п. ф-лы, 26 ил.
1. Силовая передача для гибридного транспортного средства, имеющего двигатель внутреннего сгорания и электродвигатель, содержащая первый основной входной вал, который расположен параллельно выходному валу двигателя внутреннего сгорания, на который подают движущую силу от двигателя внутреннего сгорания, и который соединяют с выходным валом двигателя внутреннего сгорания путем установки первого устройства включения и выключения в соединенное состояние, второй основной входной вал, который расположен коаксиально с первым основным входным валом и соединен с выходным валом двигателя внутреннего сгорания путем установки второго устройства включения и выключения в соединенное состояние, промежуточный входной вал, расположенный параллельно первому основному входному валу, вспомогательный входной вал, расположенный параллельно промежуточному входному валу, выходной вал, который расположен параллельно первому основному входному валу, и выводит движущую силу в ведомый модуль через обратный вал, группу первых зубчатых колес, которая расположена на первом основном входном валу и состоит из множества зубчатых колес, избирательно соединяемых с выходным валом через первый синхронизатор, группу вторых зубчатых колес, которая расположена на вспомогательном входном валу и состоит из множества зубчатых колес, избирательно соединяющих вспомогательный входной вал с выходным валом через второй синхронизатор, группу третьих зубчатых колес, которая установлена на выходном валу и которая состоит из множества зубчатых колес, совместно зацепленных с зубчатыми колесами группы первых зубчатых колес и зубчатыми колесами группы вторых зубчатых колес, и механизм дифференциального вращения, состоящий из первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента для дифференцированного вращения относительно друг друга, характеризующаяся тем, что первый вращающийся элемент соединен с первым основным входным валом и электродвигателем, второй вращающийся элемент соединен с группой первых зубчатых колес, третий вращающийся элемент соединен с фиксирующим механизмом, который позволяет устанавливать третий вращающийся элемент в фиксированное состояние, и второй вращающийся элемент замедляет движущую силу, передаваемую из первого вращающегося элемента, используя силу реакции от третьего вращающегося элемента, который помещен в фиксированное состояние с помощью фиксирующего механизма.
2. Силовая передача для гибридного транспортного средства, имеющего двигатель внутреннего сгорания и электродвигатель, содержащая основной входной вал, на который движущую силу подают от двигателя внутреннего сгорания, первый вспомогательный входной вал, который расположен параллельно основному входному валу и избирательно соединяется с основным входным валом через пару понижающих зубчатых колес первым устройством включения и выключения, второй вспомогательный входной вал, который расположен параллельно основному входному валу и избирательно соединяется с основным входным валом через пару повышающих скорость зубчатых колес вторым устройством включения и выключения, выходной вал, который расположен коаксиально с основным входным валом и выводит движущую силу в ведомый модуль через обратный вал, группу первых зубчатых колес, которая расположена на первом вспомогательном входном валу и состоит из множества зубчатых колес, избирательно соединяющихся с первым вспомогательным входным валом через первый синхронизатор, группу вторых зубчатых колес, которая расположена на втором вспомогательном входном валу, и состоит из множества зубчатых колес, избирательно соединяющихся со вторым вспомогательным входным валом через второй синхронизатор, группу третьих зубчатых колес, которая установлена на выходном валу и составлена из множества зубчатых колес, совместно зацепленных с зубчатыми колесами группы первых зубчатых колес и зубчатыми колесами группы вторых зубчатых колес, и механизм дифференциального вращения, состоящий из первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента для дифференцированного вращения относительно друг друга, характеризующаяся тем, что один из первого вспомогательного входного вала и второго вспомогательного входного вала соединен с первым вращающимся элементом, и другой выполнен с возможностью передавать движущую силу на выходной вал, не используя механизм дифференциального вращения, первый вращающийся элемент соединен с основным входным валом, третий вращающийся элемент соединен с электродвигателем, и второй вращающийся элемент объединяет движущую силу, передаваемую от первого вращающегося элемента, с движущей силой, передаваемой от третьего вращающегося элемента, и передает комбинированную движущую силу на выходной вал.
3. Силовая передача по п.2, характеризующаяся тем, что основной входной вал расположен параллельно выходному валу двигателя внутреннего сгорания, и движущую силу на него подают от двигателя внутреннего сгорания, и состоит из первого основного входного вала, соединенного с выходным валом двигателя внутреннего сгорания, путем установки первого устройства включения и выключения в соединенном состоянии, и второго основного входного вала, который расположен коаксиально с первым основным входным валом и соединен с выходным валом двигателя внутреннего сгорания, путем установки второго устройства включения и выключения в соединенном состоянии, и любой из первого основного входного вала и второго основного входного вала соединен с первым вращающим элементом, благодаря чему любой из первого вспомогательного входного вала и второго вспомогательного входного вала соединен с первым вращающимся элементом.
4. Силовая передача по п.2, характеризующаяся тем, что дополнительно содержит механизм передачи обратного хода, который избирательно соединяет пару понижающих колес увеличения и пару повышающих зубчатых колес друг с другом.
5. Силовая передача по п.1, характеризующаяся тем, что, по меньшей мере, один из первого элемента включения и выключения и второго элемента включения и выключения представляет собой сухое сцепление.
6. Силовая передача по п.1, характеризующаяся тем, что механизм дифференциального вращения представляет собой модуль планетарной передачи, в котором коаксиально установлены солнечное зубчатое колесо, кольцевое зубчатое колесо и водило, которое поддерживает с возможностью вращения множество планетарных зубчатых колес, зацепленных с солнечным зубчатым колесом и кольцевым зубчатым колесом между солнечным зубчатым колесом и кольцевым зубчатым колесом, как три типа вращающихся элемента типа одиночной шестерни, и первый вращающийся элемент представляет собой солнечное зубчатое колесо, второй вращающийся элемент представляет собой водило, и третий вращающийся элемент представляет собой кольцевое зубчатое колесо.
7. Силовая передача по п.1, характеризующаяся тем, что зубчатые колеса группы первых зубчатых колес зацепляются с третьей группой зубчатых колес для формирования множества пар зубчатых колес скоростей с нечетными номерами, и зубчатые колеса группы вторых зубчатых колес зацепляются с зубчатыми колесами третьей группы зубчатых колес для формирования множества пар зубчатых колес со скоростями с четными номерами.
8. Силовая передача по п.1, характеризующаяся тем, что зубчатые колеса группы первых зубчатых колес зацепляются с зубчатыми колесами третьей группы зубчатых колес для формирования множества пар зубчатых колес со скоростями с нечетными номерами, и зубчатые колеса группы вторых зубчатых колес зацепляются с зубчатыми колесами третьей группы зубчатых колес для формирования множества пар зубчатых колес со скоростями с нечетными номерами.
9. Силовая передача по п.1, характеризующаяся тем, что часть или все вращающиеся элементы, неподвижная часть и обмотка якоря, которые составляют электродвигатель, расположены так, что они размещаются над механизмом дифференциального вращения в направлении, перпендикулярном направлению оси выходного вала.
10. Силовая передача по п.1, характеризующаяся тем, что дополнительно содержит элемент установки запрашиваемой мощности, который устанавливает запрашиваемую мощность, запрашиваемую для выходного вала, и элемент управления, который выполняет операцию двигателя внутреннего сгорания и операцию электродвигателя в соответствии с запрашиваемой мощностью, установленной элементом установки запрашиваемой мощности.
11. Силовая передача по п.10, характеризующаяся тем, что элемент управления управляет операцией электродвигателя так, что двигатель внутреннего сгорания выполняет операцию в пределах диапазона от области, где двигатель глохнет до области максимальной области вращения.
12. Силовая передача по п.10, характеризующаяся тем, что элемент управления выполняет операцию двигателя внутреннего сгорания в пределах соответствующей рабочей области двигателя внутреннего сгорания, и элемент управления сравнивает движущую силу двигателя внутреннего сгорания, передаваемую от первого вращающегося элемента на второй вращающийся элемент, с запрашиваемой мощностью, и управляет электродвигателем для выполнения силовой операции, в случае, когда движущая сила двигателя внутреннего сгорания меньше, чем запрашиваемая мощность, и для выполнения регенеративной операции в случае, когда движущая сила двигателя внутреннего сгорания превышает запрашиваемую мощность.
13. Силовая передача по п.10, характеризующаяся тем, что элемент управления управляет электродвигателем для выполнения операции при номинальном выходе или максимальной частоте оборотов в минуту в случае, когда электродвигатель выполняет операцию при величине выхода или частоте оборотов в минуту, превышающих номинальное значение выхода или максимальное количество оборотов в минуту.
| JP 2007246057 A, 27.09.2007 | |||
| DE 19940288 C1, 15.03.2001 | |||
| JP 2005329813 A, 02.12.2005 | |||
| КОРОБКА ПЕРЕДАЧ | 1998 |
|
RU2223182C2 |

