УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
[0001] Изобретение относится к системе привода для гибридного транспортного средства, включающей в себя двигатель и электродвигатели в качестве источников движущей силы, и, конкретнее, к системе привода для гибридного транспортного средства, включающей в себя два электродвигателя или мотора-генератора в дополнение к двигателю.
Описание известного уровня техники
[0002] Известна система привода для гибридного транспортного средства, которая включает в себя двигатель, первый электродвигатель, второй электродвигатель, механизм переключения скорости и механизм деления мощности (распределения крутящих моментов), соединенный между узлом переключения скорости и выходным узлом, расположенным ближе к ведущим колесам (см., например, внутреннюю публикацию № 2013/114594 (WO 2013/114594)). Механизм переключения скорости включает в себя механизм сцепления, тормозной механизм и первый планетарный зубчатый механизм (первая планетарная передача), например, и увеличивает или уменьшает и подает крутящий момент, создаваемый в двигателе. Механизм деления мощности включает в себя, например, второй планетарный зубчатый механизм и делит движущую силу, принимаемую от механизма переключения скорости, на сторону первого электродвигателя и выходную сторону.
[0003] Система привода может быть переведена в режим HV (гибридное транспортное средство) и в режим EV (электрическое транспортное средство) при изменении состояний включения механизма сцепления и тормозного механизма. В режиме HV транспортное средство движется, используя движущую силу как от двигателя, так и от электродвигателя(ей). Режим HV включает в себя режим «диапазона высоких скоростей» и режим «диапазона низких скоростей» в качестве «дифференциальных» режимов. В режиме «диапазона высоких скоростей» устанавливается положение высокоскоростной передачи, в котором отношение скоростей в виде отношения скоростей вращения двигателя и выходного элемента механизма переключения скорости меньше отношения скоростей «1:1», представляющего прямое соединение. В режиме «диапазона низких скоростей» устанавливается положение низкоскоростной передачи, которое представляет собой положение прямого соединения. Режим EV включает в себя режим с единственным электродвигателем, в котором транспортное средство движется, используя движущую силу, производимую вторым электродвигателем, и режим с обоими электродвигателями, в котором транспортное средство движется, используя движущую силу от обоих первого электродвигателя и второго электродвигателя.
[0004] Известен другой пример системы привода, в которой узел переключения скорости соединен между механизмом деления мощности и выходным узлом, и узел переключения скорости увеличивает или уменьшает движущую силу, получаемую при делении движущей силы, производимой двигателем, при заданном отношении скоростей и непосредственно подает ее на выходной узел (см., например, публикацию японской патентной заявки № 2014-51146 (JP 2014-51146 A)). Первый электродвигатель, включенный в этот тип системы привода, представляет собой электродвигатель, который управляет скоростью двигателя, и двигатель и первый электродвигатель соответственно соединены с определенными вращающимися элементами планетарного зубчатого механизма, который составляет механизм деления мощности. Движущая сила, делимая механизмом деления мощности и распределяемая на выходную сторону, подается к узлу переключения скорости. Узел переключения скорости, который изменяет крутящий момент, подаваемый от выходного элемента механизма деления мощности, снабжен планетарным зубчатым механизмом, имеющим входной элемент, с которым соединен выходной элемент механизма деления мощности, элемент противодействующей силы и выходной элемент. Узел переключения скорости также включает в себя тормоз, который выборочно фиксирует элемент противодействующей силы, и сцепление, которое соединяет элемент противодействующей силы с входным элементом так, чтобы выборочно объединяться со всем блоком переключения скорости.
[0005] Однако в системе привода, в которой механизм деления мощности соединен между узлом переключения скорости и выходным узлом, невозможно устанавливать режим движения для увеличения или уменьшения и подачи движущей силы, делимой механизмом деления мощности и распределяемой на выходную сторону (движущая сила, непосредственно передаваемая от двигателя к ведущим колесам), при различных отношениях скоростей. Таким образом, имеется возможность улучшения с точки зрения разнообразия режимов движения.
[0006] Также в системе привода, в которой узел переключения скорости соединен между механизмом деления мощности и выходным узлом, первому электродвигателю необходимо создавать крутящий момент противодействующей силы, когда двигатель производит движущую силу; в связи с этим первый электродвигатель не может функционировать в качестве электродвигателя, который производит крутящий момент для движения транспортного средства. А именно, в этом типе системы привода не может быть установлен режим привода с обоими электродвигателями, в котором оба из первого электродвигателя и второго электродвигателя подают движущую силу для движения транспортного средства на выходной узел.
Сущность изобретения
[0007] Изобретение было разработано с учетом вышеописанных технических проблем и обеспечивает систему привода для гибридного транспортного средства, которая делает возможным увеличение разнообразия режимов движения с уменьшенным числом составляющих элементов.
[0008] Согласно одному аспекту изобретения обеспечена система привода для гибридного транспортного средства, включающая в себя двигатель внутреннего сгорания, первый электродвигатель, второй электродвигатель, выходной узел, первый планетарный зубчатый механизм, второй планетарный зубчатый механизм, первый механизм сцепления и первый тормозной механизм. Первый электродвигатель выполнен с возможностью генерирования электрической энергии, используя мощность, производимую двигателем внутреннего сгорания. Второй электродвигатель выполнен с возможностью работы с помощью электрической энергии, генерируемой первым электродвигателем, так, чтобы производить движущую силу. Выходной узел выполнен с возможностью подачи движущей силы, к которой добавляется движущая сила, производимая вторым электродвигателем. Мощность, производимая двигателем внутреннего сгорания, делится на первую часть, направляемую к первому электродвигателю, и вторую часть, направляемую к выходному узлу. Первый планетарный зубчатый механизм включает в себя первый входной элемент, первый элемент противодействующей силы и первый выходной элемент и выполнен с возможностью выполнения работы дифференциала посредством первого входного элемента, первого элемента противодействующей силы и первого выходного элемента. Первый входной элемент выполнен с возможностью приема движущей силы, производимой двигателем внутреннего сгорания. Первый элемент противодействующей силы соединен с первым электродвигателем. Второй планетарный зубчатый механизм включает в себя второй входной элемент, второй выходной элемент и второй элемент противодействующей силы. Второй планетарный зубчатый механизм выполнен с возможностью выполнения работы дифференциала посредством второго входного элемента, второго выходного элемента и второго элемента противодействующей силы. Второй входной элемент соединен с первым выходным элементом. Второй выходной элемент соединен с выходным узлом. Первый механизм сцепления выполнен с возможностью выборочного соединения первого входного элемента со вторым элементом противодействующей силы. Первый тормозной механизм обеспечен между вторым элементом противодействующей силы и неподвижным элементом и выполнен с возможностью выборочно предотвращать вращение второго элемента противодействующей силы.
[0009] В системе привода для гибридного транспортного средства в соответствии с вышеуказанным аспектом изобретения первый планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями (сателлитом), включающим в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило, и второй планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило. Первая кольцевая шестерня может быть расположена концентрично с первой солнечной шестерней. Первое водило может быть выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней. Вторая кольцевая шестерня может быть расположена концентрично со второй солнечной шестерней. Второе водило может быть выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней. Первая солнечная шестерня может обеспечивать первый выходной элемент. Первое водило может обеспечивать первый входной элемент. Первая кольцевая шестерня может обеспечивать первый элемент противодействующей силы. Вторая солнечная шестерня может обеспечивать второй элемент противодействующей силы. Второе водило может обеспечивать второй входной элемент. Вторая кольцевая шестерня может обеспечивать второй выходной элемент.
[0010] В системе привода для гибридного транспортного средства в соответствии с вышеуказанным аспектом изобретения первый планетарный зубчатый механизм может быть планетарным зубчатым механизмом с двойными планетарными шестернями, включающим в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило. Второй планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило. Первая кольцевая шестерня может быть расположена концентрично с первой солнечной шестерней. Первое водило может быть выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней, и вторую планетарную шестерню, которая находится в зацеплении с первой планетарной шестерней и первой кольцевой шестерней. Вторая кольцевая шестерня может быть расположена концентрично со второй солнечной шестерней. Второе водило может быть выполнено с возможностью вращения при удерживании третьей планетарной шестерни, которая находится в зацеплении со второй солнечней шестерней и второй кольцевой шестерней. Первая солнечная шестерня может обеспечивать первый выходной элемент. Первое водило может обеспечивать первый элемент противодействующей силы. Первая кольцевая шестерня может обеспечивать первый входной элемент. Вторая солнечная шестерня может обеспечивать второй элемент противодействующей силы. Второе водило может обеспечивать второй входной элемент. Вторая кольцевая шестерня может обеспечивать второй выходной элемент.
[0011] В системе привода для гибридного транспортного средства в соответствии с вышеуказанным аспектом изобретения первый планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило. Второй планетарный зубчатый механизм может быть планетарным зубчатым механизмом с двойными планетарными шестернями, включающим в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило. Первая кольцевая шестерня может быть расположена концентрично с первой солнечной шестерней. Первое водило может быть выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней. Вторая кольцевая шестерня может быть расположена концентрично со второй солнечной шестерней. Второе водило может быть выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней, и третью планетарную шестерню, которая находится в зацеплении со второй планетарной шестерней и второй кольцевой шестерней. Первая солнечная шестерня может обеспечивать первый выходной элемент. Первое водило может обеспечивать первый входной элемент. Первая кольцевая шестерня может обеспечивать первый элемент противодействующей силы. Вторая солнечная шестерня может обеспечивать второй элемент противодействующей силы. Второе водило может обеспечивать второй выходной элемент. Вторая кольцевая шестерня может обеспечивать второй входной элемент.
[0012] В системе привода для гибридного транспортного средства в соответствии с вышеуказанным аспектом изобретения первый планетарный зубчатый механизм может быть планетарным зубчатым механизмом с двойными планетарными шестернями, включающим в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило, и второй планетарный зубчатый механизм может быть планетарным зубчатым механизмом с двойными планетарными шестернями, включающим в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило. Первая кольцевая шестерня может быть расположена концентрично с первой солнечной шестерней. Первое водило может быть выполнено с возможностью вращения при удерживании первую планетарную шестерню, которая находится в зацеплении с первой солнечной шестерней, и вторую планетарную шестерню, которая находится в зацеплении с первой планетарной шестерней и первой кольцевой шестерней. Вторая кольцевая шестерня может быть расположена концентрично со второй солнечной шестерней. Второе водило может быть выполнено с возможностью вращения при удерживании третью планетарную шестерню, которая находится в зацеплении со второй солнечной шестерней, и четвертую планетарную шестерню, которая находится в зацеплении с третьей планетарной шестерней и второй кольцевой шестерней. Первая солнечная шестерня может обеспечивать первый выходной элемент. Первое водило может обеспечивать первый элемент противодействующей силы. Первая кольцевая шестерня может обеспечивать первый входной элемент. Вторая солнечная шестерня может обеспечивать второй элемент противодействующей силы. Второе водило может обеспечивать второй выходной элемент. Вторая кольцевая шестерня может обеспечивать второй входной элемент.
[0013] В системе привода для гибридного транспортного средства в соответствии с вышеуказанным аспектом изобретения первый планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило, и второй планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило. Первая кольцевая шестерня может быть расположена концентрично с первой солнечной шестерней. Первое водило может быть выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней. Вторая кольцевая шестерня может быть расположена концентрично со второй солнечной шестерней. Второе водило может быть выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней. Первая солнечная шестерня может обеспечивать первый выходной элемент. Первое водило может обеспечивать первый входной элемент. Первая кольцевая шестерня может обеспечивать первый элемент противодействующей силы. Второе водило может обеспечивать второй входной элемент. Вторая солнечная шестерня может обеспечивать второй выходной элемент. Вторая кольцевая шестерня может обеспечивать второй элемент противодействующей силы.
[0014] В системе привода для гибридного транспортного средства в соответствии с вышеуказанным аспектом изобретения первый планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило, и второй планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило. Первая кольцевая шестерня может быть расположена концентрично с первой солнечной шестерней. Первое водило может быть выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней. Вторая кольцевая шестерня может быть расположена концентрично со второй солнечной шестерней. Второе водило может быть выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней. Первая солнечная шестерня может обеспечивать первый выходной элемент. Первое водило может обеспечивать первый входной элемент. Первая кольцевая шестерня может обеспечивать первый элемент противодействующей силы. Вторая кольцевая шестерня может обеспечивать второй элемент противодействующей силы. Вторая солнечная шестерня может обеспечивать второй входной элемент. Второе водило может обеспечивать второй выходной элемент.
[0015] В системе привода для гибридного транспортного средства в соответствии с вышеуказанным аспектом изобретения первый планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило, и второй планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило. Первая кольцевая шестерня может быть расположена концентрично с первой солнечной шестерней. Первое водило может быть выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней. Вторая кольцевая шестерня может быть расположена концентрично со второй солнечной шестерней. Второе водило может быть выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней. Первое водило может обеспечивать первый выходной элемент. Первая кольцевая шестерня может обеспечивать первый входной элемент. Первая солнечная шестерня может обеспечивать первый элемент противодействующей силы. Второе водило может обеспечивать второй элемент противодействующей силы. Вторая солнечная шестерня может обеспечивать второй входной элемент. Вторая кольцевая шестерня может обеспечивать второй выходной элемент.
[0016] В системе привода для гибридного транспортного средства в соответствии с вышеуказанным аспектом изобретения первый планетарный зубчатый механизм может быть планетарным зубчатым механизмом с одинарными планетарными шестернями, включающим в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило, и второй планетарный зубчатый механизм может быть планетарным зубчатым механизмом с двойными планетарными шестернями, включающим в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило. Первая кольцевая шестерня может быть расположена концентрично с первой солнечной шестерней. Первое водило может быть выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней. Вторая кольцевая шестерня может быть расположена концентрично со второй солнечной шестерней. Второе водило может быть выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней, и третью планетарную шестерню, которая находится в зацеплении со второй планетарной шестерней и второй кольцевой шестерней. Первая солнечная шестерня может обеспечивать первый выходной элемент. Первое водило может обеспечивать первый входной элемент. Первая кольцевая шестерня может обеспечивать первый элемент противодействующей силы. Вторая солнечная шестерня может обеспечивать второй элемент противодействующей силы. Второе водило может обеспечивать второй входной элемент. Вторая кольцевая шестерня может обеспечивать второй выходной элемент.
[0017] Система привода для гибридного транспортного средства, согласно вышеуказанному аспекту изобретения, может дополнительно включать в себя второй механизм сцепления, выполненный с возможностью выборочного соединения второго выходного элемента со вторым элементом противодействующей силы. Также система привода для гибридного транспортного средства по изобретению может дополнительно включать в себя второй тормозной механизм, выполненный с возможностью выборочного прикрепления первого выходного элемента к неподвижному элементу. Также система привода для гибридного транспортного средства по изобретению может дополнительно включать в себя третий механизм сцепления, выполненный с возможностью выборочного соединения первого элемента противодействующей силы со вторым выходным элементом.
[0018] Система привода для гибридного транспортного средства, согласно вышеуказанному аспекту изобретения, может дополнительно включать в себя контроллер, который управляет двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления и первым тормозным механизмом. Контроллер может быть выполнен с возможностью включения первого механизма сцепления и первого тормозного механизма и дополнительной остановки работы двигателя внутреннего сгорания так, чтобы вынудить первый электродвигатель и второй электродвигатель производить движущую силу для движения гибридного транспортного средства вперед.
[0019] Система привода для гибридного транспортного средства, согласно вышеуказанному аспекту изобретения, может дополнительно включать в себя контроллер, который управляет двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления первым тормозным механизмом и вторым механизмом сцепления. Контроллер может быть выполнен с возможностью включения первого тормозного механизма и второго механизма сцепления так, чтобы предотвращать вращение ведущих колес гибридного транспортного средства.
[0020] Система привода для гибридного транспортного средства, которая описана выше, может дополнительно включать в себя контроллер, который управляет двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления и первым тормозным механизмом. Контроллер может быть выполнен с возможностью включения первого тормозного механизма и дополнительного вынуждения двигателя внутреннего сгорания и второго электродвигателя производить движущую силу для движения гибридного транспортного средства назад.
[0021] Система привода для гибридного транспортного средства, которая описана выше, может дополнительно включать в себя контроллер, который управляет двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления, первым тормозным механизмом и вторым тормозным механизмом. Контроллер может быть выполнен с возможностью включения первого тормозного механизма и второго тормозного механизма так, чтобы предотвращать вращение ведущих колес гибридного транспортного средства.
[0022] Система привода для гибридного транспортного средства, которая описана выше, может дополнительно включать в себя контроллер, который управляет двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления, первым тормозным механизмом, вторым тормозным механизмом и третьим механизмом сцепления. Контроллер может быть выполнен с возможностью включения первого тормозного механизма и второго тормозного механизма так, чтобы предотвращать вращение ведущих колес гибридного транспортного средства.
[0023] Система привода для гибридного транспортного средства согласно изобретению имеет первый планетарный зубчатый механизм, второй планетарный зубчатый механизм, первый механизм сцепления, который выборочно соединяет первый входной элемент со вторым элементом противодействующей силы, и первый тормозной механизм, который обеспечен между вторым элементом противодействующей силы и неподвижным элементом и выборочно предотвращает вращение второго элемента противодействующей силы. С уменьшенным числом составляющих элементов возможно устанавливать режим движения, в котором после деления движущей силы, производимой двигателем внутреннего сгорания, посредством первого планетарного зубчатого механизма второй планетарный зубчатый механизм увеличивает или уменьшает принимаемую движущую силу и подает ее на выходной узел. Соответственно, разнообразие режимов движения может быть увеличено с уменьшенным числом составляющих элементов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0024] Признаки, преимущества и техническое и промышленное значение примерных вариантов выполнения изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы и при этом:
Фиг. 1 представляет собой блок-схему, показывающую систему привода для гибридного транспортного средства согласно первому варианту выполнения изобретения;
Фиг. 2 представляет собой принципиальную схему, показывающую один пример системы привода, показанной на Фиг. 1;
Фиг. 3 представляет собой вид, указывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 2;
Фиг. 4 представляет собой номограмму, показывающую рабочие условия первого режима движения, указанного на Фиг. 3;
Фиг. 5 представляет собой номограмму, показывающую рабочие условия второго режима движения, указанного на Фиг. 3;
Фиг. 6 представляет собой номограмму, показывающую рабочие условия третьего режима движения, указанного на Фиг. 3;
Фиг. 7 представляет собой номограмму, показывающую рабочие условия четвертого режима движения, указанного на Фиг. 3;
Фиг. 8 представляет собой принципиальную схему, показывающую систему привода в качестве второго варианта выполнения изобретения, в котором первый планетарный зубчатый механизм системы привода по первому варианту выполнения, показанному на Фиг. 1, обеспечен планетарным зубчатым механизмом с двойными планетарными шестернями;
Фиг. 9 представляет собой вид, указывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 8;
Фиг. 10 представляет собой номограмму, показывающую рабочие условия первого режима движения, указанного на Фиг. 9;
Фиг. 11 представляет собой номограмму, показывающую рабочие условия второго режима движения, указанного на Фиг. 9;
Фиг. 12 представляет собой номограмму, показывающую рабочие условия третьего режима движения, указанного на Фиг. 9;
Фиг. 13 представляет собой номограмму, показывающую рабочие условия четвертого режима движения, указанного на Фиг. 9;
Фиг. 14 представляет собой принципиальную схему, показывающую систему привода в качестве третьего варианта выполнения изобретения, в котором второй планетарный зубчатый механизм системы привода по первому варианту выполнения, показанному на Фиг. 1, обеспечен планетарным зубчатым механизмом с двойными планетарными шестернями;
Фиг. 15 представляет собой принципиальную схему, показывающую систему привода в качестве четвертого варианта выполнения изобретения, в котором первый планетарный зубчатый механизм и второй планетарный зубчатый механизм системы привода по первому варианту выполнения, показанному на Фиг. 1, соответственно обеспечены планетарными зубчатыми механизмами с двойными планетарными шестернями;
Фиг. 16 представляет собой принципиальную схему, показывающую систему привода согласно пятому варианту выполнения изобретения;
Фиг. 17 представляет собой номограмму, показывающую рабочие условия второго режима движения, установленного для системы привода, показанной на Фиг. 16;
Фиг. 18 представляет собой принципиальную схему, показывающую систему привода шестого варианта выполнения изобретения в качестве другого примера системы привода первого варианта выполнения, показанного на Фиг. 1;
Фиг. 19 представляет собой вид, указывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 18;
Фиг. 20 представляет собой номограмму, показывающую рабочие условия первого режима движения, указанного на Фиг. 19;
Фиг. 21 представляет собой номограмму, показывающую рабочие условия второго режима движения, указанного на Фиг. 19;
Фиг. 22 представляет собой номограмму, показывающую рабочие условия третьего режима движения, указанного на Фиг. 19;
Фиг. 23 представляет собой номограмму, показывающую рабочие условия четвертого режима движения, указанного на Фиг. 19;
Фиг. 24 представляет собой систему привода седьмого варианта выполнения изобретения в качестве другого примера системы привода по первому варианту выполнения, показанному на Фиг. 1;
Фиг. 25 представляет собой вид, показывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 24;
Фиг. 26 представляет собой номограмму, показывающую рабочие условия первого режима движения, указанного на Фиг. 25;
Фиг. 27 представляет собой номограмму, показывающую рабочие условия второго режима движения, указанного на Фиг. 25;
Фиг. 28 представляет собой номограмму, показывающую рабочие условия третьего режима движения, указанного на Фиг. 25;
Фиг. 29 представляет собой номограмму, показывающую рабочие условия четвертого режима движения, указанного на Фиг. 25;
Фиг. 30 представляет собой блок-схему, показывающую систему привода согласно восьмому варианту выполнения изобретения;
Фиг. 31 представляет собой принципиальную схему, показывающую один пример системы привода, показанной на Фиг. 30;
Фиг. 32 представляет собой вид, указывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 31;
Фиг. 33 представляет собой номограмму, показывающую рабочие условия пятого режима движения, указанного на Фиг. 32;
Фиг. 34 представляет собой номограмму, показывающую рабочие условия шестого режима движения, указанного на Фиг. 32;
Фиг. 35 представляет собой номограмму, показывающую рабочие условия седьмого режима движения, указанного на Фиг. 32;
Фиг. 36 представляет собой блок-схему, показывающую систему привода согласно девятому варианту выполнения изобретения;
Фиг. 37 представляет собой принципиальную схему, показывающую один пример системы привода, показанной на Фиг. 36;
Фиг. 38 представляет собой вид, указывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 37;
Фиг. 39 представляет собой номограмму, показывающую рабочие условия пятого режима движения, указанного на Фиг. 38;
Фиг. 40 представляет собой номограмму, показывающую рабочие условия шестого режима движения, указанного на Фиг. 38;
Фиг. 41 представляет собой номограмму, показывающую рабочие условия седьмого режима движения, указанного на Фиг. 38;
Фиг. 42 представляет собой блок-схему, показывающую систему привода согласно десятому варианту выполнения изобретения;
Фиг. 43 представляет собой принципиальную схему, показывающую один пример системы привода, показанной на Фиг. 42;
Фиг. 44 представляет собой вид, указывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 43;
Фиг. 45 представляет собой номограмму, показывающую рабочие условия пятого режима движения, указанного на Фиг. 43;
Фиг. 46 представляет собой номограмму, показывающую рабочие условия шестого режима движения, указанного на Фиг. 43;
Фиг. 47 представляет собой номограмму, показывающую рабочие условия седьмого режима движения, указанного на Фиг. 43;
Фиг. 48 представляет собой блок-схему, показывающую систему привода согласно одиннадцатому варианту выполнения изобретения;
Фиг. 49 представляет собой принципиальную схему, показывающую один пример системы привода, показанной на Фиг. 48;
Фиг. 50 представляет собой вид, указывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 49;
Фиг. 51 представляет собой номограмму, показывающую рабочие условия шестого режима движения, указанного на Фиг. 50;
Фиг. 52 представляет собой номограмму, показывающую рабочие условия восьмого режима движения, указанного на Фиг. 50;
Фиг. 53 представляет собой номограмму, показывающую рабочие условия девятого режима движения, указанного на Фиг. 50;
Фиг. 54 представляет собой номограмму, показывающую рабочие условия одиннадцатого режима движения, указанного на Фиг. 50;
Фиг. 55 представляет собой номограмму, показывающую рабочие условия десятого режима движения, указанного на Фиг. 50;
Фиг. 56 представляет собой номограмму, показывающую рабочие условия седьмого режима движения, указанного на Фиг. 50;
Фиг. 57 представляет собой принципиальную схему, показывающую систему привода согласно двенадцатому варианту выполнения изобретения;
Фиг. 58 представляет собой вид, указывающий режимы движения, которые могут быть установлены для системы привода, показанной на Фиг. 57; и
Фиг. 59 представляет собой номограмму, показывающую рабочие условия одиннадцатого режима движения, указанного на Фиг. 58.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0025] Некоторые варианты выполнения изобретения будут описаны со ссылкой на чертежи. Блок-схема на Фиг. 1 схематически иллюстрирует один пример системы привода, используемой в гибридном транспортном средстве (которое будет называться как «транспортное средство») согласно первому варианту выполнения изобретения. Как показано на Фиг. 1, система 10 привода включает в себя двигатель 11, первый электродвигатель (MG (мотор-генератор) 1) 12, второй электродвигатель (MG2) 13, первый планетарный зубчатый механизм (PL1) 14, второй планетарный зубчатый механизм (PS2) 15, выходную шестерня (OUT) 16, первый механизм 17 сцепления (CL1), первый тормозной механизм (BK1) 18, PCU (блок управления мощностью) 19, гидравлический контроллер 20 и ECU (электронный блок управления) 21. Транспортное средство может быть гибридным транспортным средством со штепсельным соединением, которое может подзаряжаться посредством внешнего источника питания. Двигатель 11 представляет собой один пример вышеупомянутого двигателя внутреннего сгорания. Выходная шестерня 16 представляет собой один пример выходного узла.
[0026] Первый электродвигатель 12 обеспечен электродвигателем (мотором-генератором), имеющим функцию генерирования электрической энергии. Система 10 привода выполнена с возможностью приведения в действие второго электродвигателя 13, используя электрическую энергию, генерируемую первым электродвигателем 12, и добавления движущей силы, производимой вторым электродвигателем 13, к движущей силе для движения транспортного средства. Второй электродвигатель 13 обеспечен электродвигателем (мотором-генератором), имеющим функцию генерирования электрической энергии.
[0027] Первый планетарный зубчатый механизм 14 имеет первый входной элемент 22, который принимает выходной крутящий момент от двигателя 11, первый элемент 23 противодействующей силы, соединенный с первым электродвигателем 12, и первый выходной элемент 24 и выполняет работу дифференциала, используя эти элементы 22, 23, 24. Второй планетарный зубчатый механизм 15 имеет второй входной элемент 26, соединенный с первым выходным элементом 24, второй выходной элемент 27, соединенный с выходной шестерней 16, и второй элемент 28 противодействующей силы и выполняет работу дифференциала, используя эти элементы 26, 27, 28. Первый механизм 17 сцепления выборочно соединяет первый входной элемент 22 со вторым элементом 28 противодействующей силы. Первый тормозной механизм 18 обеспечен между вторым элементом 28 противодействующей силы и неподвижным элементом 29 и выборочно предотвращает вращение второго элемента 28 противодействующей силы.
[0028] Первый механизм 17 сцепления может быть механизмом сцепления фрикционного типа, таким как многодисковое сцепление мокрого типа, или механизмом сцепления с зацеплением, таким как зубчатое сцепление. Первый механизм 17 сцепления управляется гидравлически, например, для включения или выключения. Первый тормозной механизм 18 может быть устройством сцепления с фрикционным зацеплением, подобным первому механизму 17 сцепления, но не ограничиваясь этим. Например, механизм сцепления с зацеплением может использоваться в качестве тормозного механизма. Первый тормозной механизм 18 управляется гидравлически, например, для включения или выключения. Гидравлический контроллер 20 отдельно управляет подачей гидравлического давления к первому механизму 17 сцепления и первому тормозному механизму 18 в соответствии со значениями команд от ECU 21.
[0029] PCU 19 включает в себя инвертор 30, аккумулятор 31 и MG_ECU 32. Инвертор 30 и аккумулятор 31 соединены с первым электродвигателем 12 и вторым электродвигателем 13. PCU 19 выполняет управление для подачи электрической энергии для приведения в действие первого электродвигателя 12 и второго электродвигателя 13 и накопления электрической энергии, генерируемой первым электродвигателем 12 и вторым электродвигателем 13. ECU 21 включает в себя ECU 33 двигателя, который управляет работой двигателя 11 и в полном объеме управляет ECU 33 двигателя, PCU 19 и гидравлическим контроллером 20. PCU 19, гидравлический контроллер 20, ECU 21 и ECU 33 двигателя представляют собой примеры контроллеров.
[0030] Фиг. 2 представляет собой принципиальную схему, которая конкретно иллюстрирует один пример системы 10 привода, показанной на Фиг. 1. Как показано на Фиг. 2, система 34 привода включает в себя двигатель 11, первый электродвигатель 12, второй электродвигатель 13, первый планетарный зубчатый механизм 14, второй планетарный зубчатый механизм 15, комплект 36 шестерен дифференциала, ведущие колеса 37 и т.п., и представляет собой двухосевой тип, а именно, входной вал 38 первого планетарного зубчатого механизма 14 и ротор 39 второго электродвигателя 13 расположены на различных осях.
[0031] Первый планетарный зубчатый механизм 14 обеспечивает механизм деления мощности, который делит выходной крутящий момент двигателя 11 на сторону первого электродвигателя 12 и на сторону выходной шестерни 16 и выполняет работу дифференциала, используя три вращающихся элемента, т.е. входной элемент, выходной элемент и элемент противодействующей силы. Первый планетарный зубчатый механизм 14 имеет форму планетарного зубчатого механизма с одинарными планетарными шестернями, включающего в себя первую солнечную шестерню 40, первое водило 41 и первую кольцевую шестерню 42. Первая солнечная шестерня 40 представляет собой шестерню внешнего зацепления. Первая кольцевая шестерня 42 представляет собой шестерню внутреннего зацепления, которая расположена концентрично с первой солнечной шестерней 40. Первое водило 41 вращается, удерживая первые планетарные шестерни 43, которые находятся в зацеплении с первой солнечной шестерней 40 и первой кольцевой шестерней 42. Первое водило 41 представляет собой один пример первого входного элемента 22, и первая кольцевая шестерня 42 представляет собой один пример первого элемента 23 противодействующей силы, в то время как первая солнечная шестерня 40 представляет собой один пример первого выходного элемента 24.
[0032] Движущая сила, производимая двигателем 11, прикладывается к первому водилу 41. Конкретнее, входной вал 38, соединенный с выходным валом 44 двигателя 11, соединен с первым водилом 41. Конструкция, в которой первое водило 41 и входной вал 38 непосредственно соединены друг с другом, может быть заменена конструкцией, в которой первое водило 41 и входной вал 38 соединены посредством механизма передачи мощности, такого как зубчатый механизм. Также демпферный механизм или механизм, такой, как преобразователь крутящего момента, может быть расположен между выходным валом 44 и входным валом 38. Ротор 45 первого электродвигателя 12 соединен с первой кольцевой шестерней 42. В первом варианте выполнения, показанном на Фиг. 2, первый планетарный зубчатый механизм 14 и первый электродвигатель 12 расположены на той же оси, что и центральная ось вращения двигателя 11, и первый электродвигатель 12 расположен между двигателем 11 и первым планетарным зубчатым механизмом 14.
[0033] Второй планетарный зубчатый механизм 15 расположен на одной стороне первого планетарного зубчатого механизма 14, противоположной двигателю 11, и расположен на одной оси с двигателем 11 и первым планетарным зубчатым механизмом 14. Второй планетарный зубчатый механизм 15 имеет форму планетарного зубчатого механизма с одинарными планетарными шестернями, который представляет собой механизм дифференциала, который выполняет работу дифференциала, используя три вращающихся элемента, т.е. вторую солнечную шестерню 47, второе водило 48 и вторую кольцевую шестерню 49. Вторая солнечная шестерня 47 представляет собой шестерню внешнего зацепления и соединена с первым водилом 41 первого планетарного зубчатого механизма 14 посредством первого механизма 17 сцепления. Вторая кольцевая шестерня 49 представляет собой шестерню внутреннего зацепления, расположенную концентрично со второй солнечной шестерней 47, и вращается как единое целое с выходной шестерней 16. Второе водило 48 вращается, удерживая вторые планетарные шестерни 50, которые находятся в зацеплении со второй солнечной шестерней 47 и второй кольцевой шестерней 49, и соединено с первой солнечной шестерней 40 первого планетарного зубчатого механизма 14. Вторая солнечная шестерня 47 представляет собой один пример второго элемента 28 противодействующей силы, и второе водило 48 представляет собой один пример второго входного элемента 26, в то время как вторая кольцевая шестерня 49 представляет собой один пример второго выходного элемента 27.
[0034] Первый механизм 17 сцепления выполнен с возможностью выборочного соединения второй солнечной шестерни 47 с первым водилом 41. Составной планетарный зубчатый механизм образован так, что первое водило 41 и вторая солнечная шестерня 47, соединенные посредством включения (зацепления) первого механизма 17 сцепления, обеспечивают входной элемент, и первая солнечная шестерня 40 и второе водило 48 обеспечивают элемент противодействующей силы, в то время как первая кольцевая шестерня 42 и вторая кольцевая шестерня 49 обеспечивают выходной элемент.
[0035] Первый тормозной механизм 18 выполнен с возможностью выборочного прикрепления второй солнечной шестерни 47 к неподвижному элементу 29. Первый тормозной механизм 18 включается, когда выходной крутящий момент двигателя 11 передается на выходную шестерню 16 так, что противодействующая сила прикладывается ко второй солнечной шестерне 47, а второй планетарный зубчатый механизм 15 функционирует как повышающий редуктор. Также первый тормозной механизм 18 включается в состоянии, когда первый механизм 17 сцепления включен, так, что первое водило 41 и выходной вал 44 двигателя 11 и вторая солнечная шестерня 47 неподвижны. В результате движущая сила, производимая первым электродвигателем 12, может передаваться на вторую кольцевую шестерню 49 второго планетарного зубчатого механизма 15.
[0036] Первый механизм 17 сцепления и первый тормозной механизм 18 могут быть размещены на радиально внутренней стороне и радиально внешней стороне для выравнивания друг с другом в радиальных направлениях. В этом случае аксиальная длина системы 34 привода в целом может быть укорочена. Первый механизм 17 сцепления и первый тормозной механизм 18 также могут быть размещены в аксиальном направлении. В этом случае ограничения на внешние диаметры первого механизма 17 сцепления и первого тормозного механизма 18 снижены; в связи с этим, когда применяется механизм сцепления фрикционного типа, число фрикционных дисков может быть уменьшено.
[0037] Система 34 привода включает в себя промежуточный вал 52 и ведомую шестерню 53. Промежуточный вал 52 расположен параллельно центральной оси вращения двигателя 11 и первого планетарного зубчатого механизма 14 или второго планетарного зубчатого механизма 15. Ведомая шестерня 53 установлена на промежуточном валу 52 и находится в зацеплении с выходной шестерней 16. Также первая ведущая шестерня 54 установлена на промежуточном валу 52 и первая ведущая шестерня 54 находится в зацеплении с кольцевой шестерней 55 комплекта 36 шестерен дифференциала в качестве конечного понижающего редуктора. Вторая ведущая шестерня 56 установлена на роторе 39 второго электродвигателя 13. Вторая ведущая шестерня 56 находится в зацеплении с ведомой шестерней 53. Соответственно система 34 привода выполнена с возможностью добавления выходного крутящего момента от второго электродвигателя 13 к крутящему моменту, подаваемому от выходной шестерни 16, на ведомой шестерне 53. Крутящий момент, таким образом объединенный на ведомой шестерне 53, передается от комплекта 36 шестерен дифференциала на правый и левый приводные валы 57. Ведущие колеса 37 вращаются за счет крутящего момента, передаваемого на приводные валы 57.
[0038] Фиг. 3 показывает четыре различных режима движения, которые могут быть установлены для системы 34 привода, описанной выше со ссылкой на Фиг. 2. Как показано на Фиг. 3, система 34 привода может быть установлена в любой из с первого режима по четвертый режим движения при изменении состояний включения первого механизма 17 сцепления (CL1) и первого тормозного механизма (BK1) 18. ECU 21 управляет первым механизмом 17 сцепления, первым тормозным механизмом 18, двигателем 11, первым электродвигателем 12 и вторым электродвигателем 13 так, чтобы устанавливать каждый из с первого режима по четвертый режим движения, которые представляют собой один пример режимов движения вперед. На Фиг. 3 состояния включения (ввода в зацепление) первого механизма 17 сцепления и первого тормозного механизма 18 в каждом режиме движения обозначены как «-», представляющий выключенное состояние, или как «O», представляющий включенное или зафиксированное состояние. В таблице по Фиг. 3 «Узел деления мощности» обозначает первый планетарный зубчатый механизм 14, а «Непосредственно принимающий узел» обозначает второй планетарный зубчатый механизм 15.
[0039] Первый режим движения и второй режим движения представляют собой примеры гибридных режимов движения, в которых транспортное средство движется с помощью движущей силы, соответствующей движущей силе, производимой двигателем 11, и с помощью движущей силы, производимой вторым электродвигателем 13. Первый режим движения устанавливается путем включения первого механизма 17 сцепления. Когда система 34 привода находится в первом режиме движения, первый механизм 17 сцепления включен так, чтобы соединять первое водило 41 со второй солнечной шестерней 47, так, что первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 взаимодействуют с образованием составного планетарного зубчатого механизма.
[0040] В первом режиме движения первый механизм 17 сцепления включен так, что первое водило 41 и вторая солнечная шестерня 47 соединены друг с другом. В связи с этим выходной крутящий момент двигателя 11 передается на первые планетарные шестерни 43 и на вторую солнечную шестерню 47 посредством первого водила 41. Соответственно в первом планетарном зубчатом механизме 14 первый электродвигатель 12 функционирует как генератор и подает отрицательный крутящий момент (крутящий момент в направлении, противоположном направлению крутящего момента, производимого двигателем 11) на первую кольцевую шестерню 42 так, что первая солнечная шестерня 40 вращается в положительном направлении (вращается в том же направлении, что и двигатель 11). А именно, выходной крутящий момент двигателя 11 делится, и часть крутящего момента передается на первый электродвигатель 12. Во втором планетарном зубчатом механизме 15 второе водило 48 вращается в том же направлении, что и первая солнечная шестерня 40 первого планетарного зубчатого механизма 14, в состоянии, когда вторая солнечная шестерня 47 вращается вместе с выходным валом 44 двигателя 11. В связи с этим вторая кольцевая шестерня 49 вращается в том же направлении, что и выходной вал 44, при скорости вращения, которая зависит от скоростей вращения второй солнечной шестерни 47 и второго водила 48 и передаточного отношения (отношения числа зубьев второй солнечной шестерни 47 к числу зубьев второй кольцевой шестерни 49) второго планетарного зубчатого механизма 15. А именно другая часть выходного крутящего момента двигателя 11 передается на вторую кольцевую шестерню 49. Другими словами, первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 образуют составной планетарный зубчатый механизм, и выходной крутящий момент двигателя 11 делится составным планетарным зубчатым механизмом на сторону первого электродвигателя 12 и на сторону выходной шестерни 16. Второй электродвигатель 13 приводится в действие как электродвигатель, используя электрическую энергию, генерируемую, например, первым электродвигателем 12.
[0041] Второй режим движения устанавливается путем включения первого тормозного механизма 18. Соответственно первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 функционируют независимо друг от друга, поскольку только первая солнечная шестерня 40 и второе водило 48 соединены друг с другом.
[0042] А именно, в первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 делится на сторону первого электродвигателя 12 и на сторону первой солнечной шестерни 40. В этом случае первый электродвигатель 12 функционирует как генератор. Выходной крутящий момент двигателя 11 передается от первой солнечной шестерни 40 ко второму водилу 48 второго планетарного зубчатого механизма 15. В это время вторая солнечная шестерня 47 фиксируется первым тормозным механизмом 18. В связи с этим второй планетарный зубчатый механизм 15 функционирует как повышающий редуктор, а вторая кольцевая шестерня 49 вращается при более высокой скорости вращения, чем второе водило 48 (и первая солнечная шестерня 40). Второй электродвигатель 13 приводится в действие как электродвигатель, используя электрическую энергию, генерируемую, например, первым электродвигателем 12.
[0043] Третий режим движения и четвертый режим движения представляют собой примеры режимов движения EV, в которых работа двигателя 11 останавливается, и транспортное средство движется как электрическое транспортное средство.
[0044] Третий режим движения устанавливается путем выключения первого механизма 17 сцепления и первого тормозного механизма 18. Когда устанавливается третий режим движения, работа двигателя 11 останавливается. Соответственно в третьем режиме движения первое водило 41 первого планетарного зубчатого механизма 14 и вторая солнечная шестерня 47 второго планетарного зубчатого механизма 15 вращаются вхолостую. В связи с этим первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 не функционируют для передачи крутящего момента. Таким образом, когда устанавливается третий режим движения, ECU 21 управляет вторым электродвигателем 13 так, что он функционирует как электродвигатель, и управляет первым электродвигателем 12 так, что он не функционирует как электродвигатель, который производит крутящий момент. Это состояние является таким же или подобно состоянию, когда первый планетарный зубчатый механизм 14 отсоединен от пути передачи мощности, по которому движущая сила, подаваемая от второго электродвигателя 13, передается. В связи с этим на Фиг. 3 «Режим EV: отсоединено» отображается в столбце третьего режима движения.
[0045] Четвертый режим движения устанавливается путем включения первого механизма 17 сцепления и включения первого тормозного механизма 18. В четвертом режиме движения транспортное средство движется, используя движущую силу, подаваемую от и первого электродвигателя 12, и второго электродвигателя 13. Когда устанавливается четвертый режим движения, работа двигателя 11 останавливается. Поскольку первый механизм 17 сцепления включен и первый тормозной механизм 18 включен, чтобы прикреплять вторую солнечную шестерню 47 к неподвижному элементу 29, первое водило 41, выходной вал 44 двигателя 11 и вторая солнечная шестерня 47 предотвращаются от вращения.
[0046] Когда устанавливается четвертый режим движения, движущая сила, производимая первым электродвигателем 12, прикладывается к первой кольцевой шестерне 42 и передается от первой солнечной шестерни 40 ко второму водилу 48 под противодействующей силой первого водила 41, которое предотвращается от вращения за счет остановки работы двигателя 11. Движущая сила, передаваемая ко второму водилу 48, передается на вторую кольцевую шестерню 49 под противодействующей силой второй солнечной шестерни 47, которая предотвращается от вращения за счет включения первого тормозного механизма 18. Движущая сила, передаваемая на вторую кольцевую шестерню 49, передается на ведомую шестерню 53. В то же время движущая сила, производимая вторым электродвигателем 13, передается на ведомую шестерню 53. В результате движущая сила, производимая вторым электродвигателем 13, добавляется к движущей силе, производимой первым электродвигателем 12, и получающаяся в результате движущая сила передается на ведущие колеса 37.
[0047] Фиг. 4 представляет собой номограмму, показывающую рабочие условия первого режима движения, показанного на Фиг. 3. Как показано на номограмме по Фиг. 4, прямые линии (вертикальные линии), указывающие соответственные вращающиеся элементы составного планетарного зубчатого механизма, изображены параллельно друг другу с интервалами, представляющими передаточные отношения, и расстояния от базовой линии, которая пересекается с этими прямыми линиями под прямыми углами, представляют собой скорости вращения соответственных вращающихся элементов. Каждая пересекающая линия на номограмме указывает отношение скоростей вращения соответственных вращающихся элементов, которые находятся в различных состояниях соединения в зависимости от соответственных состояний включения первого механизма 17 сцепления и первого тормозного механизма 18. Сплошная пересекающая линия, показанная на Фиг. 4, указывает относительные скорости вращения трех вращающихся элементов первого планетарного зубчатого механизма 14, а пунктирная пересекающая линия, показанная на Фиг. 4, указывает относительные скорости вращения трех вращающихся элементов второго планетарного зубчатого механизма 15.
[0048] В первом режиме движения первый механизм 17 сцепления включен так, что первое водило 41 и вторая солнечная шестерня 47 соединены друг с другом. В связи с этим составной планетарный зубчатый механизм образуется первым планетарным зубчатым механизмом 14 и вторым планетарным зубчатым механизмом 15. Первое водило 41 и вторая солнечная шестерня 47, которые соединены друг с другом, функционируют как входной элемент составного планетарного зубчатого механизма. В первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 прикладывается к первому водилу 41, и отрицательный крутящий момент, производимый, когда первый электродвигатель 12 функционирует как генератор, прикладывается к первой кольцевой шестерне 42. Соответственно первая солнечная шестерня 40 принимает положительный крутящий момент (крутящий момент в направлении вращения двигателя 11) и вращается, и крутящий момент первой солнечной шестерни 40 передается на второе водило 48 второго планетарного зубчатого механизма 15. Во втором планетарном зубчатом механизме 15 вторая солнечная шестерня 47 соединена с выходным валом 44 двигателя 11 и вращается вместе с выходным валом 44 посредством включения первого механизма 17 сцепления, и второе водило 48 вращается в положительном направлении (вращается в том же направлении, что и двигатель 11) с помощью крутящего момента, передаваемого от первой солнечной шестерни 40. В связи с этим вторая кольцевая шестерня 49 вращается в положительном направлении. А именно, часть выходного крутящего момента двигателя 11 распределяется на первый электродвигатель 12 в первом планетарном зубчатом механизме 14, а другая часть того же крутящего момента распределяется на вторую кольцевую шестерню 49 второго планетарного зубчатого механизма 15 и подается от выходной шестерни 16. А именно, вышеописанный составной планетарный зубчатый механизм функционирует как механизм деления мощности, который делит крутящий момент двигателя 11 на сторону первого электродвигателя 12 и на сторону выходной шестерни 16, и его соотношение деления мощности составляет «(1+ρ2)/ ρ1», где соотношение деления для выходной шестерни 16 составляет «1». Здесь «ρ1» представляет собой передаточное отношение (отношение числа зубьев первой солнечной шестерни 40 и числа зубьев первой кольцевой шестерни 42) в первом планетарном зубчатом механизме 14, и «ρ2» представляет собой передаточное отношение (отношение числа зубьев второй кольцевой шестерни 49 и числа зубьев второй солнечной шестерни 47). В нижеследующем описании доля или соотношение, с которым крутящий момент двигателя 11 делится на выходную сторону механизма деления мощности и на сторону первого электродвигателя 12, будет называться «соотношением деления мощности».
[0049] Фиг. 5 представляет собой номограмму, показывающую рабочие условия второго режима движения, показанного на Фиг. 3. Во втором режиме движения первый механизм 17 сцепления выключен, как описано выше. В связи с этим только первая солнечная шестерня 40 первого планетарного зубчатого механизма 14 и второе водило 48 второго планетарного зубчатого механизма 15 соединены друг с другом. В дополнение, первый тормозной механизм 18 включен так, что вторая солнечная шестерня 47 зафиксирована. Таким образом, первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 функционируют независимо друг от друга. А именно, в первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 передается на первое водило 41 так, что первое водило 41 вращается в положительном направлении, а отрицательный крутящий момент, производимый первым электродвигателем 12, который функционирует как генератор, прикладывается к первой кольцевой шестерне 42 таким же образом, как при рабочих условиях вышеописанного первого режима движения. Соответственно первая солнечная шестерня 40 вращается в положительном направлении. Таким образом, выходной крутящий момент двигателя 11 делится первым планетарным зубчатым механизмом 14 на сторону первого электродвигателя 12 и на сторону первой солнечной шестерни 40. В этом случае соотношение деления мощности на сторону первого электродвигателя 12 составляет «1/ρ1», когда соотношение деления мощности на первую солнечную шестерню 40 составляет «1». Соответственно распределение крутящего момента на сторону первого электродвигателя 12 меньше, чем распределение крутящего момента в случае вышеописанного первого режима движения. Таким образом, «Соотношение деления небольшое (Lo)» записывается в столбце части деления мощности второго режима движения, показанного на Фиг. 3. Во втором планетарном зубчатом механизме 15 положительный крутящий момент передается от первой солнечной шестерни 40 на второе водило 48 в состоянии, когда вторая солнечная шестерня 47 фиксируется первым тормозным механизмом 18. В связи с этим второй планетарный зубчатый механизм 15 функционирует как повышающий редуктор, и вторая кольцевая шестерня 49 и выходная шестерня 16, выполненная как одно целое со второй кольцевой шестерней 49, вращаются на более высокой скорости вращения, чем второе водило 48. В столбце непосредственно принимающей части второго режима движения, показанного на Фиг. 3, записывается «Повышающая передача (Hi)».
[0050] Во втором режиме движения, когда требуется двигатель 11 для производства высокого крутящего момента, как в случае, когда нагнетатель, включенный в двигатель 11, приведен в действие, или выполняется управление, такое, как деактивация цилиндров, например, первый электродвигатель 12 управляется для приведения в действие так, чтобы увеличивать крутящий момент двигателя 11 (снижать скорость вращения). В этом случае устанавливая соотношение деления мощности от двигателя 11 на сторону первого электродвигателя 12 меньшим, чем соотношение деление мощности в случае первого режима движения, возможно полностью убирать противодействующую силу, которая действует на выходной вал 44 двигателя 11, без увеличения крутящего момента противодействующей силы, который действует на ротор 45 первого электродвигателя 12. Однако, если только соотношение деления мощности просто уменьшается, разница в скорости вращения между первым электродвигателем 12 и ведущими колесами 37 увеличивается, и может возникать циркуляция мощности, а именно, первый электродвигатель 12 может приводиться в действие с помощью электрической энергии, генерируемой вторым электродвигателем 13. Когда устанавливается второй режим движения, который описан выше, соотношение деления мощности устанавливается меньшим, чем соотношение деления мощности в случае первого режима движения, и, более того, второй планетарный зубчатый механизм 15 функционирует как повышающая передача. В связи с этим, даже если требуется двигатель 11 для обеспечения высокого крутящего момента, первый электродвигатель 12 может управляться так, чтобы он работал во вращательном состоянии (положительное вращение и отрицательный крутящий момент) для генерирования электрической энергии, в результате чего может быть предотвращено возникновение циркуляции мощности.
[0051] Система 34 привода состоит только из первого планетарного зубчатого механизма 14, второго планетарного зубчатого механизма 15, первого механизма 17 сцепления и первого тормозного механизма. Даже при такой простой конструкции система 34 привода способна устанавливать первый режим движения и второй режим движения, в которых так называемый непосредственно передаваемый крутящий момент двигателя, который подается от выходной шестерни 16 после деления с помощью первого планетарного зубчатого механизма 14, увеличивается или уменьшается с помощью второго планетарного зубчатого механизма 15. Таким образом, может быть повышено разнообразие режимов движения.
[0052] Фиг. 6 представляет собой номограмму, показывающую рабочие условия третьего режима движения, показанного на Фиг. 3. В третьем режиме движения работа двигателя 11 останавливается, и транспортное средство движется только с помощью движущей силы, производимой вторым электродвигателем 13. Когда устанавливается третий режим движения, работа двигателя 11 останавливается. Движущая сила, производимая вторым электродвигателем 13, передается на ведущие колеса 37 через вторую ведущую шестерню 56 и ведомую шестерню 53. С другой стороны, выходная шестерня 16, которая находится в зацеплении с ведомой шестерней 53, и вторая кольцевая шестерня 49, выполненная как одно целое с выходной шестерней 16, вращаются в положительном направлении. Сила сопротивления, вызываемая остановкой вращения выходного вала 44 двигателя 11, действует на второе водило 48, и первый механизм 17 сцепления выключается; в связи с этим вторая солнечная шестерня 47 вращается в отрицательном направлении. А именно, поскольку вторая солнечная шестерня 47 вращается вхолостую, никакой крутящий момент не передается через второй планетарный зубчатый механизм 15. Также в первом планетарном зубчатом механизме 14 первое водило 41 соединено с выходным валом 44 и принимает силу сопротивления. Дополнительно, электрический ток проходит через первый электродвигатель 12 так, чтобы вращать его в отрицательном направлении. В связи с этим первая солнечная шестерня 40 вращается в соответствии с вращением первой кольцевой шестерни 42. Когда ток проходит через первый электродвигатель 12, вынуждая электродвигатель 12 генерировать движущий крутящий момент, отрицательный крутящий момент прикладывается к двигателю 11 и первому водилу 41, и выходной вал 44 и первое водило 41 вращаются вхолостую в отрицательном направлении так, что никакой крутящий момент противодействующей силы не генерируется. В связи с этим первая солнечная шестерня 40 не вращается в положительном направлении с помощью крутящего момента первого электродвигателя 12. После всего, когда устанавливается третий режим движения, первый электродвигатель 12 не может функционировать как источник движущей силы.
[0053] Таким образом, когда устанавливается третий режим движения, двигатель 11 менее вероятно или маловероятно будет вынужден вращаться (замедлять вращение вследствие внутреннего сопротивления) во время движения, например, так, что потерю энергии, соответствующую замедлению вращения двигателя вследствие внутреннего сопротивления, можно избежать, и энергоэффективность может быть повышена. Также в попытке пресечь повреждение, заклинивания или т.п. подшипников, включенных во второй планетарный зубчатый механизм 15, например, максимальная скорость транспортного средства может быть ограничена в режиме движения EV. Однако, когда устанавливается третий режим движения, второй планетарный зубчатый механизм 15 находится в нейтральном состоянии, а именно, большой крутящий момент не прикладывается к механизму 15, и контактные давления на вращающихся и скользящих участках, таких как подшипники, не увеличиваются; в связи с этим ограничение на максимальную скорость транспортного средства может быть ослаблено или уменьшено.
[0054] Фиг. 7 представляет собой номограмму, показывающую рабочие условия четвертого режима движения, показанного на Фиг. 3. Четвертый режим движения представляет собой режим привода с обоими электродвигателями, в котором работа двигателя 11 останавливается, и оба из первого электродвигателя 12 и второго электродвигателя 13 приводятся в действие для движения транспортного средства. Первый электродвигатель 12 управляется для приведения в действие так, чтобы генерировать отрицательный крутящий момент и вращаться в отрицательном направлении так, что первый электродвигатель 12 функционирует как электродвигатель. Четвертый режим движения устанавливается путем включения первого механизма 17 сцепления и включения первого тормозного механизма 18. В связи с этим первое водило 41 и вторая солнечная шестерня 47 неподвижны. Движущая сила, производимая первым электродвигателем 12, передается на первую кольцевую шестерню 42, первую солнечную шестерню 40, второе водило 48 и вторую кольцевую шестерню 49 в порядке описания. В результате вторая кольцевая шестерня 49 вращается в положительном направлении. Также второй электродвигатель 13 управляется для приведения в действие так, чтобы функционировать как электродвигатель. Соответственно, когда устанавливается четвертый режим движения, движущая сила, соответствующая движущей силе, производимой первым электродвигателем 12, и движущей силе, производимой вторым электродвигателем 13, передается на ведущие колеса 37. С помощью этой конструкции, когда устанавливается четвертый режим движения, движущая сила первого электродвигателя 12 может быть использована в качестве движущей силы для движения транспортного средства.
[0055] Таким образом, как описано выше, система 34 привода изменяет соотношение деления мощности, выборочно соединяя первый входной элемент 22 первого планетарного зубчатого механизма 14, показанного на Фиг. 1, со вторым элементом 28 противодействующей силы второго планетарного зубчатого механизма 15, используя первый механизм 17 сцепления, и выборочно фиксируя второй элемент 28 противодействующей силы второго планетарного зубчатого механизма 15, используя первый тормозной механизм 18. Как будет описано ниже, составной планетарный зубчатый механизм может быть выполнен в других формах, чем те, которые описаны выше со ссылкой на Фиг. 2.
[0056] Например, для первого планетарного зубчатого механизма 14 вместо планетарного зубчатого механизма с одинарными планетарными шестернями может быть использован планетарный зубчатый механизм с двойными планетарными шестернями. В этом случае солнечная шестерня планетарного зубчатого механизма с одинарными планетарными шестернями может быть заменена солнечной шестерней планетарного зубчатого механизма с двойными планетарными шестернями, и водило планетарного зубчатого механизма с одинарными планетарными шестернями может быть заменено кольцевой шестерней планетарного зубчатого механизма с двойными планетарными шестернями, в то время как кольцевая шестерня планетарного зубчатого механизма с одинарными планетарными шестернями может быть заменена водилом планетарного зубчатого механизма с двойными планетарными шестернями.
[0057] Далее будет описана система привода по второму варианту выполнения. Фиг. 8 представляет собой принципиальную схему, иллюстрирующую систему 35 привода, которая использует планетарный зубчатый механизм с двойными планетарными шестернями для первого планетарного зубчатого механизма 14, показанного на Фиг. 2. Как показано на Фиг. 8, первый планетарный зубчатый механизм 14a, относящий к типу с двойными планетарными шестернями, имеет первые планетарные шестерни 43a, которые находятся в зацеплении с первой солнечной шестерней 40a, вторые планетарные шестерни 43b, которые находятся в зацеплении с первыми планетарными шестернями 43a и первой кольцевой шестерней 42a, и первое водило 41a, которое вращается, удерживая первые планетарные шестерни 43a и вторые планетарные шестерни 43b. Первый планетарный зубчатый механизм 14a состоит из первой кольцевой шестерни 42a в качестве одного примера первого входного элемента 22, первого водила 41a в качестве одного примера первого элемента 23 противодействующей силы и первой солнечной шестерни 40a в качестве одного примера первого выходного элемента 24. Второе водило 48 второго планетарного зубчатого механизма 15 вращается, удерживая третьи планетарные шестерни 59, которые находятся в зацеплении со второй солнечной шестерней 47 и второй кольцевой шестерней 49. Первый механизм 17 сцепления выборочно соединяет первую кольцевую шестерню 42a со второй солнечной шестерней 47 в качестве одного примера второго элемента противодействующей силы. Первый тормозной механизм 18 выборочно прикрепляет вторую солнечную шестерню 47 к неподвижному элементу 29. Третьи планетарные шестерни 59 являются такими же или подобными элементами, что и вторые планетарные шестерни 50, показанные на Фиг. 2. На Фиг. 8 одинаковые ссылочные позиции присвоены тем же или подобным элементам, которые описаны выше со ссылкой на Фиг. 2, и подробное описание этих элементов не будет предоставлено. Дополнительно, на Фиг. 8 и других принципиальных схемах, которые будут описаны ниже, ведомая шестерня 53, первая ведущая шестерня 54, кольцевая шестерня 55, второй электродвигатель 13, вторая ведущая шестерня 56 и т.д., которые присутствуют на пути передачи мощности от выходной шестерни 16 к ведущим колесам 37, показанном на Фиг. 2, не проиллюстрированы.
[0058] Фиг. 9 указывает режимы движения, которые могут быть установлены для системы 35 привода, описанной выше со ссылкой на Фиг. 8. Как показано на Фиг. 9, система 35 привода может быть переведена в любой из с первого режима по четвертый режим движения при изменении состояния включения первого механизма 17 сцепления (CL1) и первого тормозного механизма (BK1) 18. Рабочие условия с первого режима по четвертый режим движения, показанных на Фиг. 9, являются такими же или подобны рабочим условиям с первого режима по четвертый режим движения, которые описаны выше со ссылкой на Фиг. 3, и в связи с этим не будут подробно описываться.
[0059] Фиг. 10 представляет собой номограмму, показывающую рабочие условия первого режима движения, указанного на Фиг. 9. Номограмма на Фиг. 10, указывающая рабочие условия первого режима движения, является такой же или подобна номограмме по Фиг. 4, указывающей рабочие условия первого режима движения, и в связи с этим не будет подробно описываться.
[0060] Фиг. 11 представляет собой номограмму, показывающую рабочие условия второго режима движения, указанного на Фиг. 9. Номограмма Фиг. 11, указывающая рабочие условия второго режима движения, является такой же или подобна номограмме по Фиг. 5, указывающей рабочие условия второго режима движения, и в связи с этим не будет подробно описываться.
[0061] Фиг. 12 представляет собой номограмму, показывающую рабочие условия третьего режима движения, указанного на Фиг. 9. Номограмма на Фиг. 12, указывающая рабочие условия третьего режима движения, является такой же или подобна номограмме по Фиг. 6, указывающей рабочие условия третьего режима движения, и в связи с этим не будет подробно описываться. Однако следует отметить, что в рабочих условиях, показанных на Фиг. 12, никакой ток не подается к первому электродвигателю 12, и генерируется синхронный момент (момент трогания), по сравнению с рабочими условиями третьего режима движения, описанного выше со ссылкой на Фиг. 6.
[0062] Фиг. 13 представляет собой номограмму, показывающую рабочие условия четвертого режима движения, указанного на Фиг. 9. Номограмма на Фиг. 13, указывающая рабочие условия четвертого режима движения, является такой же или подобна номограмме по Фиг. 7, указывающей рабочие условия четвертого режима движения, и в связи с этим не будет подробно описываться.
[0063] Далее будет описана система привода по третьему варианту выполнения. Фиг. 14 представляет собой принципиальную схему, иллюстрирующую систему 46 привода, которая использует планетарный зубчатый механизм с двойными планетарными шестернями для второго планетарного зубчатого механизма 15, описанного выше со ссылкой на Фиг. 2. Как показано на Фиг. 14, второй планетарный зубчатый механизм 15а, относящий к типу с двойными планетарными шестернями, имеет вторые планетарные шестерни 50a, которые находятся в зацеплении со второй солнечной шестерней 47a, третьи планетарные шестерни 50b, которые находятся в зацеплении со вторыми планетарными шестернями 50a и второй кольцевой шестерней 49a, и второе водило 48a, которое вращается, удерживая вторые планетарные шестерни 50a и третьи планетарные шестерни 50b. Второй планетарный зубчатый механизм 15а состоит из второй кольцевой шестерни 49a в качестве одного примера второго входного элемента 26, второго водила 48a в качестве одного примера второго выходного элемента 27 и второй солнечной шестерни 47a в качестве одного примера второго элемента 28 противодействующей силы. Первое водило 41 первого планетарного зубчатого механизма 14 вращается, удерживая первые планетарные шестерни 43, которые находятся в зацеплении с первой солнечной шестерней 40 и первой кольцевой шестерней 42. Первый механизм 17 сцепления выборочно соединяет первое водило 41 в качестве одного примера первого входного элемента 22 со второй солнечной шестерней 47a. Первый тормозной механизм 18 выборочно прикрепляет вторую солнечную шестерню 47a к неподвижному элементу 29. На Фиг. 14 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 2, и подробное описание этих элементов не будет предоставлено. Также режимы движения, устанавливаемые для системы 46 привода, описанной выше ссылкой на Фиг. 14, являются такими же или подобны с первого режима по четвертый режим движения, которые описаны выше со ссылкой на Фиг. 3; в связи с этим эти режимы движения не будут описываться подробно.
[0064] Далее будет описана система привода по четвертому варианту выполнения. Фиг. 15 представляет собой принципиальную схему, иллюстрирующую систему 51 привода, которая использует планетарные зубчатые механизмы с двойными планетарными шестернями для первого планетарного зубчатого механизма 14 и второго планетарного зубчатого механизма 15, описанных выше со ссылкой на Фиг. 2. Как показано на Фиг. 15, первый планетарный зубчатый механизм 14a, относящийся к типу с двойными планетарными шестернями, состоит из первой кольцевой шестерни 42a в качестве одного примера первого входного элемента 22, первого водила 41a в качестве одного примера первого элемента 23 противодействующей силы и первой солнечной шестерни 40a в качестве одного примера первого выходного элемента 24. Первое водило 41a первого планетарного зубчатого механизма 14 вращается, удерживая первые планетарные шестерни 43a, которые находятся в зацеплении с первой солнечной шестерней 40a, и вторые планетарные шестерни 43b, которые находятся в зацеплении с первыми планетарными шестернями 43a и первой кольцевой шестерней 42a. Второй планетарный зубчатый механизм 15а, относящийся к типу с двойными планетарными шестернями, состоит из второй кольцевой шестерни 49a в качестве одного примера второго входного элемента 26, второго водила 48a в качестве одного примера второго выходного элемента 27 и второй солнечной шестерни 47a в качестве одного примера второго элемента 28 противодействующей силы. Второе водило 48a второго планетарного зубчатого механизма 15 вращается, удерживая третьи планетарные шестерни 50c, которые находятся в зацеплении со второй солнечной шестерней 47a, и четвертые планетарные шестерни 50d, которые находятся в зацеплении с третьими планетарными шестернями 50c и второй кольцевой шестерней 49a. Первый механизм 17 сцепления выборочно соединяет первую кольцевую шестерню 42a со второй солнечной шестерней 47a. Первый тормозной механизм 18 выборочно прикрепляет вторую солнечную шестерню 47a к неподвижному элементу 29. На Фиг. 15 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 2, Фиг. 8 и Фиг. 14, и подробное описание этих элементов не будет предоставлено. Режимы движения, устанавливаемые для системы 51 привода, которая описана выше со ссылкой на Фиг. 15, являются такими же или подобны с первого режима по четвертый режим движения, которые описаны выше со ссылкой на Фиг. 3 и Фиг. 9; в связи с этим подробное описание этих режимов движения не будет предоставлено.
[0065] В отношении системы 34 привода, показанной на Фиг. 2, второй элемент 28 противодействующей силы и второй выходной элемент 27, которые образуют второй планетарный зубчатый механизм 15, могут переключаться друг с другом.
[0066] Далее будет описана система привода по пятому варианту выполнения. Фиг. 16 представляет собой принципиальную схему, иллюстрирующую один пример системы 58 привода, в которой второй элемент 28 противодействующей силы, показанный на Фиг. 1, переключается на или заменяется вторым выходным элементом 27. В системе 10 привода, показанной на Фиг. 2, например, вторая солнечная шестерня 47 представляет собой один пример второго элемента 28 противодействующей силы, и вторая кольцевая шестерня 49 представляет собой один пример второго выходного элемента 27. С другой стороны, в системе 58 привода, показанной на Фиг. 16, вторая кольцевая шестерня 49 представляет собой один пример второго элемента 28 противодействующей силы, и вторая солнечная шестерня 47 представляет собой один пример второго выходного элемента 27. В случае системы 58 привода, показанной на Фиг. 16, первый механизм 17 сцепления выборочно зацепляет первое водило 41 в качестве одного примера первого входного элемента 22 со второй кольцевой шестерней 49 в качестве одного примера второго элемента 28 противодействующей силы. Первый тормозной механизм 18 выборочно прикрепляет вторую кольцевую шестерню 49 к неподвижному элементу 29. Второй планетарный зубчатый механизм 15 не ограничивается планетарным зубчатым механизмом с одинарными планетарными шестернями и может быть обеспечен планетарным зубчатым механизмом с двойными планетарными шестернями. Режимы движения, устанавливаемые для системы 58 привода, описанной со ссылкой на Фиг. 16, являются такими же или подобны с первого режима по четвертый режим движения, показанным на Фиг. 3; в связи с этим подробное описание этих режимов движения не будет предоставлено.
[0067] Фиг. 17 представляет собой номограмму, показывающую рабочие условия системы 58 привода, показанной на Фиг. 16, когда она находится во втором режиме движения. Как показано на Фиг. 17, второй режим движения устанавливается путем включения первого тормозного механизма 18. Рабочие условия второго режима движения, показанного на Фиг. 17, являются такими же или подобны рабочим условиям второго режима движения, который описан выше со ссылкой на Фиг. 5, и в связи с этим не будут подробно описываться.
[0068] Далее будет описана система привода по шестому варианту выполнения. Фиг. 18 представляет собой принципиальную схему, которая конкретно иллюстрирует один пример системы 10 привода, которая описана выше со ссылкой на Фиг. 1. Система 60 привода, показанная на Фиг. 18, обеспечена изменением условия соединения первого планетарного зубчатого механизма 14 и второго планетарного зубчатого механизма 15 в системе 34 привода, показанной на Фиг. 2, и расположением первого механизма 17 сцепления (CL1) и первого тормозного механизма (BK1) 18. На Фиг. 18 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 2.
[0069] Как показано на Фиг. 18, первый планетарный зубчатый механизм 14 включает в себя солнечную шестерню 40 в качестве одного примера первого выходного элемента 24, первое водило 41 в качестве одного примера первого входного элемента 22 и первую кольцевую шестерню 42 в качестве одного примера первого элемента 23 противодействующей силы. Второй планетарный зубчатый механизм 15 включает в себя вторую солнечную шестерню 47 в качестве одного примера второго входного элемента 26, второе водило 48 в качестве одного примера второго выходного элемента 27 и вторую кольцевую шестерню 49 в качестве одного примера второго элемента 28 противодействующей силы.
[0070] Первый механизм 17 сцепления расположен между первым водилом 41 и второй кольцевой шестерней 49 и выполнен с возможностью выборочного соединения первого водила 41 со второй кольцевой шестерней 49. Первый тормозной механизм 18 расположен между второй кольцевой шестерней 49 и неподвижным элементом 29 и выполнен с возможностью выборочного прикрепления второй кольцевой шестерни 49 к неподвижному элементу 29. Первая солнечная шестерня 40 соединена со второй солнечной шестерней 47. Выходная шестерня (OUT) 16 соединена со вторым водилом 48. Также первый механизм 17 сцепления и первый тормозной механизм 18 расположены между первым планетарным зубчатым механизмом 14 и вторым планетарным зубчатым механизмом 15 так, что первый механизм 17 сцепления и первый тормозной механизм 18 размещены соосно на радиально внутренней стороне и радиально внешней стороне. Таким образом, аксиальная длина системы 60 привода в целом, измеряемая в аксиальном направлении, может быть укорочена.
[0071] Фиг. 19 указывает режимы движения, которые могут быть установлены для системы 60 привода, показанной на Фиг. 18. Как показано на Фиг. 19, возможно переводить систему 60 привода в из с первого режима по четвертый режим движения при изменении состояния включения первого механизма 17 сцепления (CL1) и первого тормозного механизма (BK1) 18. Первый режим движения и второй режим движения представляют собой примеры гибридных режимов движения, в которых транспортное средство движется с помощью движущей силы, производимой двигателем 11.
[0072] Когда система 60 привода находится в первом режиме движения, первое водило 41 и вторая кольцевая шестерня 49 соединяются с помощью первого механизма 17 сцепления так, что первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 образуют составной планетарный зубчатый механизм. В первом режиме движения первое водило 41 и вторая кольцевая шестерня 49 соединяются так, что выходной вал 44 двигателя 11 соединяется с первым водилом 41 и второй кольцевой шестерней 49. Соответственно, в первом планетарном зубчатом механизме 14 первый электродвигатель 12 функционирует как генератор и прикладывает отрицательный крутящий момент к первой кольцевой шестерне 42 так, что первая солнечная шестерня 40 вращается в положительном направлении. А именно, выходной крутящий момент двигателя 11 делится, и часть выходного крутящего момента предоставляется первому электродвигателю 12. Во втором планетарном зубчатом механизме 15 вторая солнечная шестерня 47 вращается в том же направлении, что и первая солнечная шестерня 40 первого планетарного зубчатого механизма 14, в состоянии, когда вторая кольцевая шестерня 49 вращается вместе с выходным валом 44 двигателя 11 так, что второе водило 48 вращается со скоростью вращения, которая зависит от скоростей вращения второй кольцевой шестерни 49 и второй солнечной шестерни 47 и передаточного отношения (отношения числа зубьев второй кольцевой шестерни 49 и числа зубьев второй солнечной шестерни 47) второго планетарного зубчатого механизма 15. А именно, другая часть выходного крутящего момента двигателя 11 передается на второе водило 48. Второй электродвигатель 13 приводится в действие как электродвигатель, используя электрическую энергию, генерируемую, например, первым электродвигателем 12.
[0073] Второй режим движения устанавливается путем включения первого тормозного механизма 18 так, чтобы прикреплять вторую кольцевую шестерню 49 к неподвижному элементу 29. Соответственно, первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 функционируют независимо друг от друга, поскольку только первая солнечная шестерня 40 и вторая солнечная шестерня 47 соединены друг с другом.
[0074] Когда устанавливается второй режим движения, выходной крутящий момент двигателя 11 делится на сторону первого электродвигателя 12 и на сторону первой солнечной шестерни 40 в первом планетарном зубчатом механизме 14. В этом случае первый электродвигатель 12 функционирует как генератор. Далее крутящий момент передается от первой солнечной шестерни 40 ко второй солнечной шестерне 47 второго планетарного зубчатого механизма 15. Поскольку вторая кольцевая шестерня 49 фиксируется первым тормозным механизмом 18, и выходной крутящий момент двигателя 11 прикладывается ко второй солнечной шестерне 47, второй планетарный зубчатый механизм 15 функционирует как редуктор скорости. В результате второе водило 48 вращается на более низкой скорости вращения, чем у второй солнечной шестерни 47. Второй электродвигатель 13 приводится в действие как электродвигатель, используя электрическую энергию, генерируемую первым электродвигателем 12, например.
[0075] Третий режим движения и четвертый режим движения представляют собой примеры режимов движения EV, при которых транспортное средство движется как электрическое транспортное средство при остановке работы двигателя 11. Третий режим движения устанавливается путем выключения первого механизма 17 сцепления и первого тормозного механизма 18 соответственно.
[0076] Если устанавливается третий режим движения, работа двигателя 11 останавливается. Когда устанавливается третий режим движения, первое водило 41 и вторая кольцевая шестерня 49 вращаются вхолостую таким же или подобным образом, как при рабочих условиях третьего режима движения системы 34 привода, показанной на Фиг. 3. В связи с этим первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 не функционируют для передачи крутящего момента. Таким образом, когда устанавливается третий режим движения, ECU 21 управляет первым электродвигателем 12 так, что он не функционирует как электродвигатель, который производит крутящий момент, и управляет вторым электродвигателем 13 так, что он функционирует как электродвигатель.
[0077] Четвертый режим движения устанавливается путем остановки работы двигателя 11 и включения первого механизма 17 сцепления и первого тормозного механизма 18. В четвертом режиме движения транспортное средство движется с помощью движущей силы, подаваемой от обоих из первого электродвигателя 12 и второго электродвигателя 13. Когда устанавливается четвертый режим движения, работа двигателя 11 останавливается, и выходной вал 44 предотвращается от вращения с помощью первого тормозного механизма 18.
[0078] Когда устанавливается четвертый режим движения, движущая сила, производимая первым электродвигателем 12, прикладывается к первой кольцевой шестерне 42, передается как противодействующая сила первых планетарных шестерней 43 на первую солнечную шестерню 40, поскольку первое водило 41 неподвижно, и затем передается от первой солнечной шестерни 40 на вторую солнечную шестерню 47. Поскольку вторая кольцевая шестерня 49 неподвижна, движущая сила, передаваемая на вторую солнечную шестерню 47, передается как противодействующая сила вторых планетарных шестерен 50 на второе водило 48 и передается от второго водила 48 на ведущие колеса 37 через выходную шестерню 16 и ведомую шестерню 53. В то же время движущая сила, производимая вторым электродвигателем 13, передается на ведущие колеса 37 через ведомую шестерню 53. В результате ведущие колеса 37 приводятся в движение с помощью движущей силы, соответствующей движущей силе, производимой первым электродвигателем 12, и движущей силе, производимой вторым электродвигателем 13.
[0079] Фиг. 20 представляет собой номограмму, показывающую рабочие условия первого режима движения, указанного на Фиг. 19. В составном планетарном зубчатом механизме первого режима движения первое водило 41 и вторая кольцевая шестерня 49, соединенные с помощью первого механизма 17 сцепления, образуют входной элемент.
[0080] В первом режиме движения первый механизм 17 сцепления включается так, чтобы соединять первое водило 41 со второй кольцевой шестерней 49 так, что первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 образуют составной планетарный зубчатый механизм. Первое водило 41 и вторая кольцевая шестерня 49, соединенные друг с другом, функционируют как входной элемент составного планетарного зубчатого механизма. В первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 принимается первым водилом 41, и отрицательный крутящий момент, производимый первым электродвигателем 12, прикладывается к первой кольцевой шестерне 42. Соответственно, первая солнечная шестерня 40 принимает положительный крутящий момент и вращается, и крутящий момент передается на вторую солнечную шестерню 47. Во втором планетарном зубчатом механизме 15 вторая кольцевая шестерня 49 соединяется с двигателем 11 с помощью первого механизма 17 сцепления и вращается вместе с двигателем 11, и вторая солнечная шестерня 47 вращается в положительном направлении с помощью крутящего момента, передаваемого от первой солнечной шестерни 40, так, что второе водило 48 вращается в положительном направлении. А именно, когда система 60 привода находится в первом режиме движения, часть выходного крутящего момента двигателя 11 распределяется на первый электродвигатель 12, а другая часть выходного крутящего момента распределяется на второе водило 48 таким же или подобным образом, как при рабочих условиях первого режима движения, который описан выше со ссылкой на Фиг. 4. А именно, соотношение деления мощности для мощности, подаваемой на сторону первой кольцевой шестерни 42, составляет «ρ2/(ρ1+(ρ1×ρ2))», когда соотношение деления мощности на сторону выходной шестерни 16 составляет «1».
[0081] Фиг. 21 представляет собой номограмму, показывающую рабочие условия второго режима движения, указанного на Фиг. 19. Как показано на Фиг. 21, во втором режиме движения первый механизм 17 сцепления выключен так, что только первая солнечная шестерня 40 и вторая солнечная шестерня 47 соединяются друг с другом, и вращение второй кольцевой шестерни 49 предотвращается с помощью первого тормозного механизма 18; в связи с этим первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 функционируют независимо друг от друга. А именно, в первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 передается на первое водило 41 так, что первое водило 41 вращается в положительном направлении, а отрицательный крутящий момент, производимый первым электродвигателем 12, который функционирует как генератор, прикладывается к первой кольцевой шестерне 42 так, что первая солнечная шестерня 40 вращается в положительном направлении таким же или подобным образом, как при рабочих условиях первого режима движения, который описан выше со ссылкой на Фиг. 20. Таким образом, когда система 60 привода находится во втором режиме движения, выходной крутящий момент двигателя 11 делится на сторону первого электродвигателя 12 и на сторону первой солнечной шестерни 40 с помощью первого планетарного зубчатого механизма 14. Во втором планетарном зубчатом механизме 15 вращение второй кольцевой шестерни 49 предотвращается с помощью первого тормозного механизма 18 так, что положительный крутящий момент, подаваемый от первой солнечной шестерни 40, передается на вторую солнечную шестерню 47. В связи с этим второй планетарный зубчатый механизм 15 функционирует как редуктор скорости, и второе водило 48 и выходная шестерня 16, выполненная как одно целое со вторым водилом 48, вращаются на более низкой скорости вращения, чем у второй солнечной шестерни 47. В этом случае крутящий момент второго водила 48 или выходной шестерни 16 больше, чем крутящий момент в случае первого режима движения, который описан выше со ссылкой на Фиг. 20. В этом случае соотношение деления мощности для мощности, подаваемой на сторону первого электродвигателя 12, составляет «1/ρ1», когда соотношение деления мощности на первую солнечную шестерню 40 составляет «1». Поскольку соотношение деления мощности для первого электродвигателя 12 больше, чем соотношение деления мощности в первом режиме движения, который описан выше со ссылкой на Фиг. 20, «Соотношение деления большое (Hi)» записано в столбце части деления мощности второго режима движения, показанного на Фиг. 19. Также, поскольку второе водило 48 в качестве одного примера второго выходного элемента 27 вращается на более низкой скорости вращения, чем вторая солнечная шестерня 47 в качестве одного примера второго входного элемента 26, второй планетарный зубчатый механизм 15, который обеспечивает непосредственно принимающий узел, функционирует как понижающая передача.
[0082] В то же время, когда выходной крутящий момент второго электродвигателя 13 близок к нулю, ротор 39 второго электродвигателя 13 приводится в плавающее состояние. В этом случае, если движущая сила, производимая двигателем 11, передается на сторону ротора 39, может возникать грохот шестерен, обеспеченных в системе передачи мощности, включающей в себя ротор 39. Даже в этом случае, когда устанавливается второй режим движения, вторая солнечная шестерня 47 в качестве одного примера второго входного элемента 26 вращается на более высокой скорости вращения, чем первое водило 41 и вторая кольцевая шестерня 49. В результате инерциальная масса переходит на сторону более высокой инерции, и инерция может быть увеличена без увеличения скорости вращения двигателя 11. В связи с этим грохот шестерен, который описан выше, может быть уменьшен или предотвращен, и, следовательно, характеристика NV (шума и вибрации) может быть улучшена.
[0083] Фиг. 22 представляет собой номограмму, показывающую рабочие условия третьего режима движения, указанного на Фиг. 19. Как показано на Фиг. 22, в третьем режиме движения работа двигателя 11 останавливается, и транспортное средство движется только с помощью движущей силы второго электродвигателя 13. Движущая сила, производимая вторым электродвигателем 13, вынуждает выходную шестерню 16, которая находится в зацеплении с ведомой шестерней 53, и вторым водилом 48, выполненным как одно целое с выходной шестерней 16, вращаться в положительном направлении. Вторая солнечная шестерня 47 второго планетарного зубчатого механизма 15 принимает силу сопротивления, возникающую из-за остановки двигателя 11, и первый механизм 17 сцепления выключается так, что вторая кольцевая шестерня 49 вращается в положительном направлении. А именно, поскольку вторая кольцевая шестерня 49 вращается вхолостую, никакой крутящий момент не передается через второй планетарный зубчатый механизм 15. Также в первом планетарном зубчатом механизме 14 первое водило 41, соединенное с выходным валом 44 двигателя 11, работа которого остановлена, принимает силу сопротивления, и первая солнечная шестерня 40 вращается в положительном направлении вместе со второй солнечной шестерней 47; в связи с этим первая кольцевая шестерня 42 и первый электродвигатель 12, соединенный с первой кольцевой шестерней 42, вращаются в отрицательном направлении. Вращение первого электродвигателя 12 является просто холостым и не производит ни электрической энергии, ни движущего крутящего момента таким же или подобным образом, что и работа в третьем режиме движения, который описан выше со ссылкой на Фиг. 6.
[0084] Фиг. 23 представляет собой номограмму, показывающую рабочие условия четвертого режима движения, указанного на Фиг. 19. Как показано на Фиг. 23, в четвертом режиме движения, который представляет собой режим привода с обоими электродвигателями, работа двигателя 11 останавливается, и первый электродвигатель 12 вращается как электродвигатель в отрицательном направлении. Когда устанавливается четвертый режим движения, первый механизм 17 сцепления включается, и первый тормозной механизм 18 включается так, что первое водило 41 и вторая кольцевая шестерня 49 неподвижны. Движущая сила, производимая первым электродвигателем 12, передается на второе водило 48 через первую солнечную шестерню 40 (вторую солнечную шестерню 47) и подается. Крутящий момент, производимый первым электродвигателем 12, действует для вращения второго водила 48 в положительном направлении (направлении вращения двигателя 11). Соответственно, в четвертом режиме движения движущая сила, подаваемая от второго электродвигателя 13, добавляется к движущей силе, подаваемой от второго водила 48 на ведомой шестерне 53, и получающаяся в результате движущая сила передается на ведущие колеса 37. Вторая солнечная шестерня 47 и первая солнечная шестерня 40 вращаются на более высокой скорости вращения, чем выходной вал 44 двигателя 11 и второе водило 48.
[0085] Далее будет описана система привода по седьмому варианту выполнения. Фиг. 24 представляет собой принципиальную схему, конкретно иллюстрирующую один пример системы 10 привода, описанной выше со ссылкой на Фиг. 1. Система 61 привода, показанная на Фиг. 24, обеспечена изменением условия соединения первого планетарного зубчатого механизма 14 и второго планетарного зубчатого механизма 15 в первом варианте выполнения, показанном на Фиг. 2, и расположением первого механизма 17 сцепления и первого тормозного механизма 18. На Фиг. 24 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 2.
[0086] Как показано на Фиг. 24, первый механизм 17 сцепления расположен между первой кольцевой шестерней 42 и вторым водилом 48 и выполнен с возможностью выборочного соединения первой кольцевой шестерни 42 в качестве первого входного элемента 22 со вторым водилом 48. Первый тормозной механизм 18 расположен между вторым водилом 48 и неподвижным элементом 29 и выполнен с возможностью выборочного прикрепления второго водила 48 к неподвижному элементу 29. Первое водило 41 в качестве одного примера первого выходного элемента 24 соединено со второй солнечной шестерней 47. Соответственно во втором планетарном зубчатом механизме 15 вторая солнечная шестерня 47 представляет собой один пример второго входного элемента 26. Выходная шестерня 16 соединена со второй кольцевой шестерней 49 второго планетарного зубчатого механизма 15, и вторая кольцевая шестерня 49 представляет собой один пример второго выходного элемента 27. Дополнительно, второе водило 48 второго планетарного зубчатого механизма 15 представляет собой один пример второго элемента 28 противодействующей силы. В системе 61 привода первый механизм 17 сцепления расположен между первым планетарным зубчатым механизмом 14 и вторым планетарным зубчатым механизмом 15, и первый тормозной механизм 18 расположен между вторым планетарным зубчатым механизмом 15 и первым электродвигателем 12.
[0087] Фиг. 25 указывает режимы движения, которые могут быть установлены для системы 61 привода, показанной на Фиг. 24. Как показано на Фиг. 25, возможно переводить систему 61 привода в любой из с первого режима по четвертый режим движения при изменении состояния включения первого механизма 17 сцепления (CL1) и первого тормозного механизма (BK1) 18. Первый режим движения и второй режим движения представляют собой примеры гибридных режимов движения, в которых транспортное средство движется с помощью движущей силы, производимой двигателем 11. Первый режим движения устанавливается путем включения первого механизма 17 сцепления. В этом случае соотношение деления мощности на сторону первого электродвигателя 12 больше, чем соотношение деления мощности в случае второго режима движения. Второй режим движения устанавливается путем включения первого тормозного механизма 18. В этом случае соотношение деления мощности на сторону первого электродвигателя 12 меньше, чем соотношение деления мощности в случае первого режима движения, и второй планетарный зубчатый механизм 15 функционирует как реверсивный (обратное вращение) механизм. Третий режим движения и четвертый режим движения представляют собой примеры режимов EV, в которых работа двигателя 11 останавливается, и транспортное средство движется как электрическое транспортное средство. Третий режим движения устанавливается путем выключения первого тормозного механизма 18 и первого механизма 17 сцепления, и транспортное средство движется, используя движущую силу второго электродвигателя 13. Четвертый режим движения устанавливается путем включения первого тормозного механизма 18 и включения первого механизма 17 сцепления. В четвертом режиме движения транспортное средство движется, используя движущую силу обоих первого электродвигателя 12 и второго электродвигателя 13.
[0088] Фиг. 26 представляет собой номограмму, показывающую рабочие условия первого режима движения, указанного на Фиг. 25. Как показано на Фиг. 26, в первом режиме движения первый механизм 17 сцепления включается так, что первая кольцевая шестерня 42 и второе водило 48 соединяются друг с другом; в связи с этим первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 образуют составной планетарный зубчатый механизм. Далее первая кольцевая шестерня 42 и второе водило 48, которые соединены друг с другом, функционируют как входной элемент составного планетарного зубчатого механизма. В первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 принимается первой кольцевой шестерней 42, и отрицательный крутящий момент, производимый первым электродвигателем 12, прикладывается к первой солнечной шестерне 40. Соответственно первое водило 41 принимает положительный крутящий момент и вращается, и крутящий момент передается на вторую солнечную шестерню 47 второго планетарного зубчатого механизма 15. Во втором планетарном зубчатом механизме 15 второе водило 48 соединено с выходным валом 44 через первый механизм 17 сцепления и вращается вместе с двигателем 11, и вторая солнечная шестерня 47 вращается в положительном направлении с помощью крутящего момента, передаваемого от первого водила 41, так, что вторая кольцевая шестерня 49 вращается в положительном направлении. А именно, часть выходного крутящего момента двигателя 11 распределяется на первый электродвигатель 12 в первом планетарном зубчатом механизме 14, а другая часть выходного крутящего момента распределяется на вторую кольцевую шестерню 49 второго планетарного зубчатого механизма 15 и подается от выходной шестерни 16. А именно, соотношение деления мощности на сторону первой солнечной шестерни 40 составляет «(ρ1×ρ2)/(1+ρ1)», когда соотношение деления на сторону выходной шестерни 16 составляет «1». Когда устанавливается первый режим движения, который представляет собой гибридный режим движения, второй электродвигатель 13 приводится в действие как электродвигатель, используя электрическую энергию, генерируемую, например, первым электродвигателем 12.
[0089] Фиг. 27 представляет собой номограмму, показывающую рабочие условия второго режима движения, указанного на Фиг. 25. Как показано на Фиг. 27, второй режим движения устанавливается путем выключения первого механизма 17 сцепления. В первом планетарном зубчатом механизме 14 и втором планетарном зубчатом механизме 15 только первое водило 41 и вторая солнечная шестерня 47 соединены друг с другом, и вращение второго водила 48 предотвращается с помощью первого тормозного механизма 18. В связи с этим первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 функционируют независимо друг от друга. А именно, в первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 передается на первую кольцевую шестерню 42 так, что первая кольцевая шестерня 42 вращается в положительном направлении, и положительный крутящий момент, производимый первым электродвигателем 12, который функционирует как генератор, прикладывается к первой солнечной шестерне 40 так, что первое водило 41 вращается в положительном направлении. Таким образом, выходной крутящий момент двигателя 11 делится на сторону первого электродвигателя 12 и на сторону первого водила 41 с помощью первого планетарного зубчатого механизма 14. Во втором планетарном зубчатом механизме 15 положительный крутящий момент передается от первого водила 41 на вторую солнечную шестерню 47 в состоянии, когда второе водило 48 фиксируется первым тормозным механизмом 18. В связи с этим второй планетарный зубчатый механизм 15 функционирует как реверсивный (обратное вращение) механизм, и вторая кольцевая шестерня 49 и выходная шестерня 16, выполненная как одно целое со второй кольцевой шестерней 49, вращаются в отрицательном направлении. Крутящий момент второй кольцевой шестерни 49 принимает более высокое абсолютное значение крутящего момента по сравнению с абсолютным значением крутящего момента в случае первого режима движения, указанного на Фиг. 25, когда крутящий момент двигателя 11 одинаков. В этом случае соотношение деления мощности на сторону выходной шестерни 16 составляет «-ρ1/(1+ρ1)», когда соотношение деления мощности на сторону первого водила 41 составляет «1».
[0090] В то же время второй электродвигатель 13 приводится в действие как электродвигатель, используя электрическую энергию, генерируемую, например, первым электродвигателем 12. В этом случае второй электродвигатель 13 приводится в движение во вращательном направлении, соответствующем движению в обратном направлении. С таким образом сконструированной системой 61 привода возможно путем включения первого тормозного механизма 18 устанавливать режим движения в обратном направлении, в котором транспортное средство движется назад, используя движущую силу, производимую двигателем 11, и движущую силу, производимую вторым электродвигателем 13, который приводится в действие как электродвигатель, использующий электрическую энергию, генерируемую первым электродвигателем 12.
[0091] Фиг. 28 представляет собой номограмму, показывающую рабочие условия третьего режима движения, указанного на Фиг. 25. Как показано на Фиг. 28, третий режим движения устанавливается путем выключения первого механизма 17 сцепления и первого тормозного механизма 18. Когда устанавливается третий режим движения, работа двигателя 11 останавливается. Соответственно в третьем режиме движения первая кольцевая шестерня 42 первого планетарного зубчатого механизма 14 и второе водило 48 второго планетарного зубчатого механизма 15 вращаются вхолостую так, что первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 не функционируют для передачи крутящего момента. В связи с этим, когда устанавливается третий режим движения, ECU 21 управляет первым электродвигателем 12 так, что он не функционирует как электродвигатель, который производит крутящий момент, и управляет вторым электродвигателем 13 так, что он функционирует как электродвигатель.
[0092] Конкретнее, движущая сила, производимая вторым электродвигателем 13, передается от второй ведущей шестерни 56 на ведущие колеса 37 через ведомую шестерню 53. При этом выходная шестерня 16, которая находится в зацеплении с ведомой шестерней 53, и вторая кольцевая шестерня 49, выполненная как одно целое с выходной шестерней 16, вращаются в положительном направлении. Поскольку сила сопротивления, производимая путем остановки двигателя 11, прикладывается ко второй солнечной шестерне 47 второго планетарного зубчатого механизма 15, и первый механизм 17 сцепления выключается, второе водило 48 вращается в положительном направлении. А именно, второе водило 48 вращается вхолостую, и второй планетарный зубчатый механизм 15 не передает никакого крутящего момента. Также в первом планетарном зубчатом механизме 14 первая кольцевая шестерня 42 соединена с остановленным двигателем 11 и принимает силу сопротивления от двигателя 11; в связи с этим первое водило 41 и вторая солнечная шестерня 47 оба вращаются в положительном направлении так, что первая солнечная шестерня 40 и первый электродвигатель 12, соединенный с солнечной шестерней 40, вращаются в положительном направлении. В этом случае первый электродвигатель 12 просто вращается вхолостую и не генерирует ни электрическую энергию, ни движущий крутящий момент.
[0093] Фиг. 29 представляет собой номограмму, показывающую рабочие условия четвертого режима движения, указанного на Фиг. 25. Как показано на Фиг. 29, в четвертом режиме движения, который устанавливается путем включения первого механизма 17 сцепления и первого тормозного механизма 18, транспортное средство движется, используя движущую силу, производимую обоими первым электродвигателем 12 и вторым электродвигателем 13. Когда устанавливается четвертый режим движения, работа двигателя 11 останавливается, и вращение выходного вала 44 останавливается первым тормозным механизмом 18. Конкретнее, движущая сила, производимая первым электродвигателем 12, принимается первой солнечной шестерней 40 и передается на вторую кольцевую шестерню 49 через первое водило 41 и вторую солнечную шестерню 47. Крутящий момент, генерируемый первым электродвигателем 12, действует, чтобы вращать вторую кольцевую шестерню 49 в положительном направлении. Соответственно, когда устанавливается четвертый режим движения, транспортное средство движется, используя движущую силу, соответствующую движущей силе, подаваемой от второй кольцевой шестерни 49, и движущей силе, производимой вторым электродвигателем 13. Конструкция и функции, свойственные седьмому варианту выполнения, который описан выше со ссылкой на Фиг. 24-29, например, конструкция и функции для установки второго режима движения для движения в обратном направлении, также могут быть применены к другим вариантам выполнения.
[0094] Далее будет описана система привода по восьмому варианту выполнения изобретения. Фиг. 30 представляет собой блок-схему, схематически иллюстрирующую систему 62 привода по восьмому варианту выполнения. В системе 62 привода, которая показана на Фиг. 30, второй планетарный зубчатый механизм 15 включает в себя второй механизм 64 сцепления в сравнении с системой 10 привода, показанной на Фиг. 1. Второй механизм 64 сцепления выборочно соединяет второй элемент 28 противодействующей силы со вторым выходным элементом 27. На Фиг. 30 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 1, и подробное описание этих элементов не будет предоставлено. Гидравлический контроллер 20 по восьмому варианту выполнения, показанному на Фиг. 30, отдельно управляет подачей гидравлических давлений к первому механизму 17 сцепления, первому тормозному механизму 18 и второму механизму 64 сцепления в ответ на значения команд, получаемых от ECU 21. PCU 19, гидравлический контроллер 20, ECU 21, ECU 33 двигателя и т.д. представляет собой примеры контроллеров.
[0095] Фиг. 31 представляет собой принципиальную схему, конкретно иллюстрирующую один пример системы 62 привода, описанной со ссылкой на Фиг. 30. Система 63 привода, показанная на Фиг. 31, представляет собой пример, обеспеченный изменением условия соединения первого планетарного зубчатого механизма 14 и второго планетарного зубчатого механизма 15 в системе 34 привода, показанной на Фиг. 2, и расположением первого механизма 17 сцепления и первого тормозного механизма 18, и дополнительно добавлением второго механизма 64 сцепления (CL2) в систему. На Фиг. 31 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 2, и подробное описание этих элементов не будет предоставлено.
[0096] Например, как показано на Фиг. 31, движущая сила, производимая двигателем 11, передается на первое водило 41. Первый механизм 17 сцепления расположен между первым водилом 41 и второй кольцевой шестерней 49 и выборочно соединяет первое водило 41 в качестве одного примера первого входного элемента 22 со второй кольцевой шестерней 49 в качестве одного примера второго элемента 28 противодействующей силы. Первый тормозной механизм 18 расположен между второй кольцевой шестерней 49 и неподвижным элементом 29 и выборочно прикрепляет вторую кольцевую шестерню 49 к неподвижному элементу 29. Первая солнечная шестерня 40 в качестве одного примера первого выходного элемента 24 соединена со второй солнечной шестерней 47. Соответственно во втором планетарном зубчатом механизме 15 вторая солнечная шестерня 47 представляет собой один пример второго входного элемента 26. Выходная шестерня 16 соединена со вторым водилом 48 второго планетарного зубчатого механизма 15. Таким образом, второе водило 48 представляет собой один пример второго выходного элемента 27. Дополнительно, вторая кольцевая шестерня 49 второго планетарного зубчатого механизма 15 представляет собой один пример второго элемента 28 противодействующей силы. Также второй механизм 64 сцепления расположен между второй кольцевой шестерней 49 и вторым водилом 48 и выборочно соединяет вторую кольцевую шестерню 49 со вторым водилом 48.
[0097] Фиг. 32 указывает режимы движения, которые могут быть установлены для системы 63 привода, показанной на Фиг. 31. Как показано на Фиг. 32, система 63 привода может быть переведена в любой один из с первого режима по седьмой режим движения при изменении состояния включения первого механизма 17 сцепления (CL1), второго механизма 64 сцепления (CL2) и первого тормозного механизма (BK1) 18. Каждый из с первого режима по седьмой режим движения устанавливается при вынуждении ECU 21 осуществлять управление первым механизмом 17 сцепления, вторым механизмом 64 сцепления, первым тормозным механизмом 18, двигателем 11, первым электродвигателем 12 и вторым электродвигателем 13. Первый режим движения, второй режим движения, шестой режим движения и седьмой режим движения представляют собой примеры гибридных режимов движения. Третий режим движения, при котором транспортное средство движется, используя движущую силу, производимую вторым электродвигателем 13, в то время как работа двигателя 11 останавливается, и четвертый режим движения, при котором транспортное средство движется, используя движущую силу, производимую обоими первым электродвигателем 12 и вторым электродвигателем 13, представляют собой примеры режимов EV. Пятый режим движения представляет собой один пример режима парковки. С первого режима по четвертый режим движения, показанные на Фиг. 32, представляют собой такие же или подобны с первого режима по четвертый режим движения, описанным выше со ссылкой на Фиг. 19, и в связи с этим подробное описание этих режимов не будет предоставлено.
[0098] Фиг. 33 представляет собой номограмму, показывающую рабочие условия пятого режима движения, показанного на Фиг. 32. Как показано на Фиг. 33, пятый режим движения устанавливается путем включения второго механизма 64 сцепления и включения первого тормозного механизма 18. Когда система 63 привода находится в пятом режиме движения, вторая кольцевая шестерня 49 и второе водило 48 соединяются друг с другом с помощью второго механизма 64 сцепления, и вращение второй кольцевой шестерни 49 и второго водила 48 предотвращается с помощью первого тормозного механизма 18. А именно, когда устанавливается пятый режим движения, второе водило 48 в качестве одного примера второго выходного элемента 27 предотвращается от вращения так, чтобы предотвращать вращение выходной шестерни 16; таким образом, второй планетарный зубчатый механизм 15 функционирует как механизм парковки. В первом планетарном зубчатом механизме 14 первая солнечная шестерня 40 предотвращается от вращения вместе со второй солнечной шестерней 47, и выходной крутящий момент двигателя 11 передается на первое водило 41 так, чтобы вращать первое водило 41 в положительном направлении. Против крутящего момента, прикладываемого к первому водилу 41, отрицательный крутящий момент, производимый, когда первый электродвигатель 12 функционирует как генератор, прикладывается к первой кольцевой шестерне 42.
[0099] Фиг. 34 представляет собой номограмму, показывающую рабочие условия шестого режима движения, показанного на Фиг. 32. Как показано на Фиг. 34, шестой режим движения, который представляет собой гибридный режим, устанавливается путем включения первого механизма 17 сцепления и второго механизма 64 сцепления. А именно, когда второй механизм сцепления 64 включен, весь второй планетарный зубчатый механизм 15 вращается как единое целое. Также, когда первый механизм 17 сцепления включен, выходной вал 44 двигателя 11 соединяется со второй кольцевой шестерней 49. Соответственно движущая сила, производимая двигателем 11, непосредственно передается на выходную шестерню 16 через второй планетарный зубчатый механизм 15. Также в первом планетарном зубчатом механизме 14 первое водило 41 соединено с двигателем 11, и первая солнечная шестерня 40 соединена с двигателем 11 через второй планетарный зубчатый механизм 15 и первый механизм 17 сцепления так, что весь первый планетарный зубчатый механизм 14 вращается как единое целое и не выполняет работу дифференциала. Соответственно выходной крутящий момент, производимый, когда первый электродвигатель 12 функционирует как электродвигатель, передается на выходную шестерню 16 без увеличения или уменьшения через первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15. Таким образом, движущие силы двигателя 11 и первого электродвигателя 12 объединяются и подаются от выходной шестерни 16. Также движущая сила, производимая вторым электродвигателем 13, который функционирует как электродвигатель, добавляется к движущей силе двигателя 11 и первого электродвигателя 12 на ведомой шестерне 53. А именно, все из двигателя 11, первого электродвигателя 12 и второго электродвигателя 13 генерируют движущую силу для движения транспортного средства, и движущая сила передается на ведущие колеса 37. Соответственно, когда устанавливается шестой режим движения, движущая сила генерируется, используя химическую энергию, хранящуюся в виде топлива, и электрическую энергию блока электропитания; в связи с этим максимальная движущая сила, которая может быть сгенерирована транспортными средствами, может быть сгенерирована. В частности, поскольку соответственные вращающиеся элементы первого планетарного зубчатого механизма 14 и второго планетарного зубчатого механизма 15 не вращаются относительно друг друга, как показано на Фиг. 34, потеря мощности может быть уменьшена, и энергоэффективность может быть улучшена.
[0100] Фиг. 35 представляет собой номограмму, показывающую рабочие условия седьмого режима движения, показанного на Фиг. 32. Как показано на Фиг. 35, седьмой режим движения устанавливается путем выключения первого тормозного механизма 18 и первого механизма 17 сцепления и включения второго механизма 64 сцепления. Если первый механизм 17 сцепления выключен, только первая солнечная шестерня 40 и вторая солнечная шестерня 47 соединяются друг с другом между первым планетарным зубчатым механизмом 14 и вторым планетарным зубчатым механизмом 15. В связи с этим часть выходного крутящего момента двигателя 11, которая распределяется на первую солнечную шестерню 40, передается на вторую солнечную шестерню 47 второго планетарного зубчатого механизма 15. Поскольку второй механизм 64 сцепления включен, и его два вращающихся элемента, т.е. второе водило 48 и вторая кольцевая шестерня 49, соединены друг с другом, весь второй планетарный зубчатый механизм 15 вращается как единое целое. Соответственно второй планетарный зубчатый механизм 15 не работает для переключения скорости, и в связи с этим движущая сила первой солнечной шестерни 40 первого планетарного зубчатого механизма 14 передается на выходную шестерню 16 без увеличения или уменьшения вторым планетарным зубчатым механизмом 15. Далее движущая сила передается от выходной шестерни 16 на ведущие колеса 37.
[0101] В то же время второй электродвигатель 13 функционирует как электродвигатель, используя электрическую энергию, генерируемую первым электродвигателем 12, и движущая сила, производимая вторым электродвигателем 13, передается на ведущие колеса 37. А именно, движущая сила после преобразования в электрическую энергию снова преобразуется в механическую движущую силу посредством второго электродвигателя 13 и добавляется к движущей силе, подаваемой от выходной шестерни 16. Когда устанавливается седьмой режим движения, выходная шестерня 16 вращается на более высокой скорости вращения по сравнению со случаем второго режима движения, показанного на Фиг. 27. Отношение скоростей уменьшается на величину, соответствующую увеличению скорости вращения. Также соотношение деления мощности на сторону первого электродвигателя 12 составляет «1/ρ1», когда соотношение деления мощности на сторону выходной шестерни 16 составляет «1». Это соотношение больше, чем соотношение деления мощности в первом режиме движения, показанном на Фиг. 32.
[0102] Таким образом, система 63 привода дополнительно обеспечивается вторым механизмом 64 сцепления в сравнении с системой 60 привода, показанной на Фиг. 18, так, что три режима движения, т.е. с пятого по седьмой режимы движения, могут быть дополнительно установлены. Конструкция и функции, свойственные восьмому варианту выполнения, который описан выше со ссылкой на Фиг. 30-35, например, конструкция, дополнительно включающая в себя второй механизм 64 сцепления, который выборочно соединяет второй выходной элемент 27 со вторым элементом 28 противодействующей силы, и ее функции, также могут быть применены к другим вариантам выполнения.
[0103] Далее будет описана система привода по девятому варианту выполнения изобретения. Фиг. 36 представляет собой блок-схему, схематически иллюстрирующую систему 65 привода по девятому варианту выполнения. Как показано на Фиг. 36, система 65 привода снабжена вторым тормозным механизмом (BK2) 66 в сравнении с системой 10 привода, показанной на Фиг. 1. Второй тормозной механизм 66 выборочно прикрепляет первый выходной элемент 24 (один пример второго входного элемента 26) к неподвижному элементу 29. На Фиг. 36 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 1, и подробное описание этих элементов не будет предоставлено. Гидравлический контроллер 20 по девятому варианту выполнения, показанному на Фиг. 36, отдельно управляет подачей гидравлических давлений к первому механизму 17 сцепления, первому тормозному механизму 18 и второму тормозному механизму 66 в ответ на значения команд, формируемых из ECU 21. PCU 19, гидравлический контроллер 20, ECU 21, контроллер 33 двигателя и т.д. представляет собой примеры контроллеров.
[0104] Фиг. 37 представляет собой принципиальную схему, конкретно иллюстрирующую один пример системы 65 привода, показанной на Фиг. 36. Система 67 привода, показанная на Фиг. 37, обеспечена добавлением второго тормозного механизма 66 в систему 60 привода, показанную на Фиг. 18. Второй тормозной механизм 66 выборочно прикрепляет первую солнечную шестерню 40 в качестве одного примера первого выходного элемента 24 к неподвижному элементу 29. На Фиг. 37 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 1 и на Фиг. 18, и подробное описание этих элементов не будет предоставлено.
[0105] Фиг. 38 указывает режимы движения, которые могут быть установлены для системы 67 привода, показанной на Фиг. 37. Как показано на Фиг. 38, система 67 привода может быть переведена в любой из с первого режима по седьмой режим движения при изменении состояния включения первого механизма 17 сцепления (CL1), первого тормозного механизма (BK1) 18 и второго тормозного механизма (BK2) 66. Каждый из с первого режима по седьмой режим движения устанавливается при вынуждении ECU 21 осуществлять управление первым механизмом 17 сцепления, первым тормозным механизмом 18 вторым тормозным механизмом 66, двигателем 11, первым электродвигателем 12 и вторым электродвигателем 13. Первый режим движения, второй режим движения, шестой режим движения и седьмой режим движения представляют собой примеры гибридных режимов движения. Третий режим движения и четвертый режим движения представляют собой примеры режимов EV. Пятый режим движения представляет собой один пример режима парковки. С первого режима по четвертый режим движения представляют собой такие же или подобны с первого режима по четвертый режим движения, описанным выше со ссылкой на Фиг. 19, и в связи с этим подробное описание этих режимов не будет предоставлено.
[0106] Фиг. 39 представляет собой номограмму, показывающую рабочие условия пятого режима движения, показанного на Фиг. 38. Как показано на Фиг. 39, пятый режим движения, который представляет собой режим парковки, устанавливается путем включения первого тормозного механизма 18 и второго тормозного механизма 66. Во втором планетарном зубчатом механизме 15, когда устанавливается пятый режим движения, вторая солнечная шестерня 47 в качестве одного примера второго входного элемента 26 и вторая кольцевая шестерня 49 в качестве одного примера второго элемента 28 противодействующей силы предотвращаются от вращения так, что второе водило 48 (выходная шестерня 16) в качестве одного примера второго выходного элемента 27 предотвращается от вращения. Рабочие условия в случае, когда устанавливается пятый режим движения, являются такими же или подобны рабочим условиям пятого режима движения, описанного выше со ссылкой на Фиг. 33, и в связи с этим не будут подробно описываться.
[0107] Фиг. 40 представляет собой номограмму, показывающую рабочие условия шестого режима движения, показанного на Фиг. 38. Шестой режим движения устанавливается путем включения первого механизма 17 сцепления и второго тормозного механизма 66. Как показано на Фиг. 40, в шестом режиме движения первый механизм 17 сцепления включается так, что первое водило 41 и вторая кольцевая шестерня 49 соединяются друг с другом; в связи с этим первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 образуют составной планетарный зубчатый механизм. В составном планетарном зубчатом механизме вращение первой солнечной шестерни 40 и второй солнечной шестерни 47 предотвращается с помощью второго тормозного механизма 66. В первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 принимается первым водилом 41, и крутящий момент, производимый первым электродвигателем 12, может быть приложен к первой кольцевой шестерне 42. Выходной крутящий момент двигателя 11 непосредственно передается на вторую кольцевую шестерню 49 второго планетарного зубчатого механизма 15 через первое водило 41. Во втором планетарном зубчатом механизме 15 вторая кольцевая шестерня 49 соединяется с выходным валом 44 двигателя 11 через первый механизм 17 сцепления так, что вторая кольцевая шестерня 49 вращается вместе с двигателем 11, и вторая солнечная шестерня 47 предотвращается от вращения вторым тормозным механизмом 66. В результате второе водило 48 вращается в положительном направлении с помощью крутящего момента, передаваемого от второй кольцевой шестерни 49. А именно, часть выходного крутящего момента двигателя 11 может быть распределена на первый электродвигатель 12 в первом планетарном зубчатом механизме 14, а другая часть выходного крутящего момента распределяется на второе водило 48 второго планетарного зубчатого механизма 15 и подается от выходной шестерни 16. Поскольку первый режим движения представляет собой гибридный режим, второй электродвигатель 13 может приводиться в действие как электродвигатель, используя электрическую энергию, генерируемую, например, первым электродвигателем 12.
[0108] Фиг. 41 представляет собой номограмму, показывающую рабочие условия седьмого режима движения, показанного на Фиг. 38. Седьмой режим движения представляет собой последовательный гибридный режим и устанавливается путем включения второго тормозного механизма 66. Как показано на Фиг. 41, когда устанавливается седьмой режим движения, вращение первой солнечной шестерни 40 предотвращается с помощью второго тормозного механизма 66, и первый планетарный зубчатый механизм 14 отделяется или отсоединяется от второго планетарного зубчатого механизма 15 первым механизмом 17 сцепления, чтобы функционировать как независимый механизм. Таким образом, движущая сила, производимая двигателем 11, передается только на первую кольцевую шестерню 42 через первое водило 41. К первой кольцевой шестерне 42 прикладывается отрицательный крутящий момент, производимый первым электродвигателем 12, который функционирует как генератор. Второй электродвигатель 13 приводится в действие как электродвигатель, используя электрическую энергию, генерируемую первым электродвигателем 12. Движущая сила, производимая вторым электродвигателем 13, передается от второй ведущей шестерни 56 на ведущие колеса 37 через ведомую шестерню 53. С другой стороны, выходная шестерня 16, которая находится в зацеплении с ведомой шестерней 53, и второе водило 48, выполненное как одно целое с выходной шестерней 16, вращаются в положительном направлении, используя крутящий момент, передаваемый от второго электродвигателя 13. Однако во втором планетарном зубчатом механизме 15 вращение второй солнечной шестерни 47 предотвращается с помощью второго тормозного механизма 66, и первый механизм 17 сцепления выключается; в связи с этим вторая кольцевая шестерня 49 вращается вхолостую, и никакой крутящий момент не передается на первый планетарный зубчатый механизм 14.
[0109] Таким образом, в случае системы 67 привода три режима движения, т.е. с пятого по седьмой режимы движения, могут быть дополнительно установлены, обеспечивая систему 60 привода, показанную на Фиг. 18, вторым тормозным механизмом 66. Конструкция и функции, свойственные девятому варианту выполнения, который описан выше со ссылкой на Фиг. 36-41, например, конструкция, дополнительно включающая в себя второй тормозной механизм 66, который выборочно прикрепляет первый выходной элемент 24 к неподвижному элементу 29, и ее функции, также могут быть применены к другим вариантам выполнения.
[0110] Далее будет описана система привода по десятому варианту выполнения изобретения. Фиг. 42 представляет собой блок-схему, иллюстрирующую систему 69 привода по десятому варианту выполнения. По сравнению с системой 63 привода, показанной на Фиг. 31, система 69 привода, показанная на Фиг. 42, не обеспечена вторым механизмом 64 сцепления, но вместо этого дополнительно обеспечена третьим механизмом 68 сцепления (CL3). Третий механизм 68 сцепления выборочно соединяет первый элемент 23 противодействующей силы со вторым выходным элементом 27. На Фиг. 42 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 1, и подробное описание этих элементов не будет предоставлено. Гидравлический контроллер 20 по десятому варианту выполнения, показанному на Фиг. 42, отдельно управляет подачей гидравлических давлений к первому механизму 17 сцепления, первому тормозному механизму 18 и третьему механизму 68 сцепления в ответ на значения команд, формируемых из ECU 21. PCU 19, гидравлический контроллер 20, ECU 21, ECU 33 двигателя и т.д. представляет собой примеры контроллеров.
[0111] Фиг. 43 представляет собой принципиальную схему, конкретно иллюстрирующую один пример системы 69 привода, показанной на Фиг. 42. Система 70 привода, показанная на Фиг. 43, по существу обеспечивается добавлением третьего механизма 68 сцепления в систему 60 привода, показанную на Фиг. 18. Также система 70 привода, показанная на Фиг. 43, отличается от системы 60 привода, показанной на Фиг. 18, расположением первого механизма 17 сцепления, первого тормозного механизма 18, третьего механизма 68 сцепления, двигателя 11, первого электродвигателя 12 и второго электродвигателя 13. А именно, первый механизм 17 сцепления и первый тормозной механизм 18 расположены между двигателем 11 и вторым планетарным зубчатым механизмом 15 в аксиальном направлении так, что они радиально выровнены друг с другом. Первый планетарный зубчатый механизм 14 расположен на одной стороне второго планетарного зубчатого механизма 15 противоположно двигателю 11, если смотреть в аксиальном направлении, и первый электродвигатель 12 расположен на одной стороне первого планетарного зубчатого механизма 14 противоположно второму планетарному зубчатому механизму 15 в аксиальном направлении. На Фиг. 43 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 18.
[0112] Фиг. 44 указывает режимы движения, которые могут быть установлены для системы 70 привода, показанной на Фиг. 43. Как показано на Фиг. 44, система 70 привода может быть переведена в любой из с первого режима по седьмой режим движения при изменении состояния включения первого механизма 17 сцепления (CL1), первого тормозного механизма (BK1) 18 и третьего механизма 68 сцепления (CL3). Каждый из с первого режима по седьмой режим движения устанавливается при вынуждении ECU 21 осуществлять управление первым механизмом 17 сцепления, первым тормозным механизмом 18, третьим механизмом 68 сцепления, двигателем 11, первым электродвигателем 12 и вторым электродвигателем 13. Первый режим движения, второй режим движения, пятый режим движения и шестой режим движения представляют собой примеры гибридных режимов движения. Третий режим движения, четвертый режим движения и седьмой режим движения представляют собой примеры режимов EV. Рабочие условия с первого режима по четвертый режим движения являются такими же или подобны рабочим условиям с первого режима по четвертый режим движения, описанных выше со ссылкой на Фиг. 19, и в связи с этим их подробное описание не будет предоставлено.
[0113] Фиг. 45 представляет собой номограмму, показывающую рабочие условия пятого режима движения, указанного на Фиг. 44. Как показано на Фиг. 45, пятый режим движения представляет собой гибридный режим и устанавливается, когда первый тормозной механизм 18 и третий механизм 68 сцепления соответственно включены. С помощью третьего механизма 68 сцепления, таким образом, включенным в пятом режиме движения, первая кольцевая шестерня 42 первого планетарного зубчатого механизма 14 и второе водило 48 второго планетарного зубчатого механизма 15 соединяются друг с другом. Также вращение второй кольцевой шестерни 49 предотвращается с помощью первого тормозного механизма 18. А именно, в первом планетарном зубчатом механизме 14 выходной крутящий момент двигателя 11 передается на первое водило 41 так, чтобы вращать первое водило 41 в положительном направлении, а отрицательный крутящий момент, производимый первым электродвигателем 12, который функционирует как генератор, прикладывается к первой кольцевой шестерне 42 так, что первая солнечная шестерня 40 вращается в положительном направлении таким же или подобным образом, как при рабочих условиях второго режима движения, который описан выше со ссылкой на Фиг. 21. Выходной крутящий момент двигателя 11 делится первым планетарным зубчатым механизмом 14 на сторону первого электродвигателя 12 и на сторону первой солнечной шестерни 40. Во втором планетарном зубчатом механизме 15 вращение второй кольцевой шестерни 49 предотвращается с помощью первого тормозного механизма 18 так, что положительный крутящий момент передается от первой солнечной шестерни 40 на вторую солнечную шестерню 47. В связи с этим второй планетарный зубчатый механизм 15 функционирует как редуктор скорости, и второе водило 48 и выходная шестерня 16, выполненная как одно целое со вторым водилом 48, вращаются на более низкой скорости вращения, чем двигатель 11 и вторая солнечная шестерня 47. Второе водило 48 и выходная шестерня 16, выполненная как одно целое со вторым водилом 48, постоянно вращаются с той же скоростью вращения, что и первая кольцевая шестерня 42, посредством третьего механизма 68 сцепления.
[0114] Фиг. 46 представляет собой номограмму, показывающую рабочие условия шестого режима движения, указанного на Фиг. 44. Как показано на Фиг. 46, шестой режим движения устанавливается, когда первый механизм 17 сцепления и третий механизм 68 сцепления соответственно включены. Составной планетарный зубчатый механизм функционирует как механизм переключения скорости, в котором отношение скоростей прямого соединения, которое составляет «1:1», устанавливается как каждое из отношения скоростей вращения двигателя 11 и ротора 45 первого электродвигателя 12 и отношения скоростей вращения двигателя 11 и выходной шестерни 16. Работа в случае, когда система 70 привода находится в шестом режиме движения, является такой же или подобна работе в шестом режиме движения, описанном выше на Фиг. 34, и в связи с этим ее подробное описание не будет предоставлено.
[0115] Фиг. 47 представляет собой номограмму, показывающую рабочие условия седьмого режима движения, указанного на Фиг. 44. Как показано на Фиг. 47, седьмой режим движения устанавливается путем включения третьего механизма 68 сцепления. В седьмом режиме движения, который представляет собой один пример режима EV, работа двигателя 11 останавливается, и транспортное средство движется, используя движущую силу обоих первого электродвигателя 12 и второго электродвигателя 13. Первый электродвигатель 12 приводится в действие так, чтобы функционировать как электродвигатель, и сообщает вращение в положительном направлении первой кольцевой шестерне 42. С помощью включенного третьего механизма 86 сцепления первая кольцевая шестерня 42 и второе водило 48 соединяются друг с другом. В связи с этим второе водило 48 и выходная шестерня 16, выполненная как одно целое со вторым водилом 48, вращаются с той же скоростью вращения, что и ротор 45 первого электродвигателя 12. Движущая сила, производимая вторым электродвигателем 13, передается на ведомую шестерню 53, и ведомая шестерня 53 передает движущую силу, соответствующую движущей силе, производимой первым электродвигателем 12, и движущей силе, производимой вторым электродвигателем 13, на ведущие колеса 37.
[0116] Таким образом, в случае системы 70 привода три режима движения, т.е. с пятого по седьмой режимы движения, могут быть дополнительно установлены за счет дополнительного обеспечения системы 60 привода, показанной на Фиг. 18, например, третьего механизма 68 сцепления. Также в сравнении с системой 67 привода, показанной на Фиг. 37, с пятого по седьмой режимы движения, устанавливаемые для системы 70 привода, отличаются от с пятого по седьмой режимов движения, указанных на Фиг. 38. Конструкция и функции, свойственные десятому варианту выполнения, который описан выше со ссылкой на Фиг. 42-47, например, конструкция, дополнительно включающая в себя третий механизм 68 сцепления, который выборочно соединяет первый элемент 23 противодействующей силы со вторым выходным элементом 27, и ее функции, также могут быть применены к другим вариантам выполнения.
[0117] Далее будет описана система привода по одиннадцатому варианту выполнения изобретения. Фиг. 48 представляет собой блок-схему, схематически иллюстрирующую систему 71 привода по одиннадцатому варианту выполнения. Как показано на Фиг. 48, система 71 привода включает в себя второй тормозной механизм 66, показанный на Фиг. 36, и третий механизм 68 сцепления, показанный на Фиг. 42, в дополнение к первому механизму 17 сцепления и первому тормозному механизму 18. Второй тормозной механизм 66 выборочно прикрепляет первый выходной элемент 24 (один пример второго входного элемента 26) к неподвижному элементу 29. Третий механизм 68 сцепления выборочно соединяет первый элемент 23 противодействующей силы со вторым выходным элементом 27. На Фиг. 48 одинаковые ссылочные позиции присвоены одинаковым или подобным элементам, которые описаны выше со ссылкой на Фиг. 1, Фиг. 36 и Фиг. 42, и подробное описание этих элементов не будет предоставлено. Гидравлический контроллер 20 по одиннадцатому варианту выполнения, показанному на Фиг. 48, отдельно управляет подачей гидравлических давлений к первому механизму 17 сцепления, первому тормозному механизму 18, второму тормозному механизму 66 и третьему механизму 68 сцепления в ответ на значения команд, получаемых от ECU 21. PCU 19, гидравлический контроллер 20, ECU 21, ECU 33 двигателя и т.д. представляют собой примеры контроллеров.
[0118] Фиг. 49 представляет собой принципиальную схему, конкретно иллюстрирующую другой пример системы 71 привода, показанной на Фиг. 48. Система 72 привода, показанная на Фиг. 49, обеспечена изменением условий соединения и расположением или местоположениями первого планетарного зубчатого механизма 14, второго планетарного зубчатого механизма 15, первого механизма 17 сцепления и первого тормозного механизма 18 в десятом варианте выполнения, который описан выше со ссылкой на Фиг. 44. А именно, условия соединения входных элементов, выходных элементов и элементов противодействующей силы, которые образуют первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 системы 72 привода, являются такими же или подобны условиям соединения входных элементов, выходных элементов и элементов противодействующей силы, которые образуют первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 системы 34 привода, показанной на Фиг. 2. Также условия соединения первого механизма 17 сцепления и первого тормозного механизма 18 системы 72 привода являются такими же или подобны условиям соединения первого механизма 17 сцепления и первого тормозного механизма 18 системы 34 привода, показанной на Фиг. 2. Система 72 привода отличается от системы 34 привода тем, что первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 системы 72 привода расположены на той же оси, что и центральная ось вращения двигателя 11, и второй планетарный зубчатый механизм 15 расположен между двигателем 11 и первым планетарным зубчатым механизмом 14. Первый электродвигатель 12 расположен на одной стороне первого планетарного зубчатого механизма 14 противоположно второму планетарному зубчатому механизму 15. Первый тормозной механизм 18, второй тормозной механизм 66 и первый механизм 17 сцепления расположены между двигателем 11 и вторым планетарным зубчатым механизмом 15. Третий механизм 68 сцепления расположен между первым планетарным зубчатым механизмом 14 и вторым планетарным зубчатым механизмом 15.
[0119] Фиг. 50 указывает режимы движения, которые могут быть установлены для системы 72 привода, показанной на Фиг. 49. Как показано на Фиг. 50, система 72 привода может быть переведена в любой из с первого режима по одиннадцатый режим движения при изменении состояния включения первого тормозного механизма 18 (BK1), первого механизма 17 сцепления (CL1), второго тормозного механизма (BK2) 66 и третьего механизма 68 сцепления (CL3). Каждый из с первого режима по одиннадцатый режим движения устанавливается при вынуждении ECU 21 осуществлять управление первым тормозным механизмом 18, первым механизмом 17 сцепления, вторым тормозным механизмом 66, третьим механизмом 68 сцепления, двигателем 11, первым электродвигателем 12 и вторым электродвигателем 13. Рабочие условия с первого режима по пятый режим движения, указанных на Фиг. 50, являются такими же или подобны рабочим условиям режимов движения, указанных на Фиг. 32, и в связи с этим подробное описание этих режимов не будет предоставлено.
[0120] Фиг. 51 представляет собой номограмму, показывающую рабочие условия шестого режима движения, указанного на Фиг. 50. Как показано на Фиг. 51, шестой режим движения устанавливается путем включения первого механизма 17 сцепления и второго тормозного механизма 66. В этом случае первое водило 41 и вторая солнечная шестерня 47 соединяются друг с другом посредством включения первого механизма 17 сцепления, и вращение первой солнечной шестерни 40 и второго водила 48 предотвращается вторым тормозным механизмом 66 так, что образуется составной планетарный зубчатый механизм. В первом планетарном зубчатом механизме 14 движущая сила, производимая двигателем 11, передается на первое водило 41, и вращение первой солнечной шестерни 40 останавливается; в связи с этим противодействующая сила, вынуждающая первый электродвигатель 12 функционировать как генератор, прикладывается к первой кольцевой шестерне 42. Во втором планетарном зубчатом механизме 15 движущая сила, производимая двигателем 11, передается на вторую солнечную шестерню 47, и вращение второго водила 48 останавливается; в связи с этим вторая кольцевая шестерня 49 вращается в отрицательном направлении. В то же время второй электродвигатель 13 производит движущую силу для вращения в отрицательном направлении. Движущая сила, производимая вторым электродвигателем 13, передается на ведомую шестерню 53, и добавляется к движущей силе, передаваемой от двигателя 11, на ведомой шестерне 53. Далее получающаяся движущая сила передается на ведущие колеса 37. В этом случае транспортное средство движется назад.
[0121] Фиг. 52 представляет собой номограмму, показывающую рабочие условия восьмого режима движения, указанного на Фиг. 50. Как показано на Фиг. 52, восьмой режим движения представляет собой гибридный режим и устанавливается путем включения первого тормозного механизма 18 и третьего механизма 68 сцепления. В этом случае вращение второй солнечной шестерни 47 предотвращается первым тормозным механизмом 18, который находится во включенном состоянии, и первая кольцевая шестерня 42 и вторая кольцевая шестерня 49 соединяются друг с другом посредством третьего механизма 68 сцепления. В первом планетарном зубчатом механизме 14 движущая сила, производимая двигателем 11, передается на первое водило 41, и первая солнечная шестерня 40 соединяется со вторым водилом 48; в связи с этим противодействующая сила, вынуждающая первый электродвигатель 12 функционировать как генератор, прикладывается к первой кольцевой шестерне 42. Во втором планетарном зубчатом механизме 15 движущая сила, производимая двигателем 11, передается на второе водило 48 так, что второе водило 48 вращается в положительном направлении, и вращение второй солнечной шестерни 47 предотвращается; в связи с этим движущая сила передается на вторую кольцевую шестерню 49 и выходную шестерню 16, выполненную как одно целое со второй кольцевой шестерней 49, так, чтобы вращать их в положительном направлении. С помощью зафиксированного первого тормозного механизма 18 вторая кольцевая шестерня 49 непосредственно соединяется с первой кольцевой шестерней 42. Первый электродвигатель 12 и вторая кольцевая шестерня 49 вращаются на более высокой скорости вращения, чем скорость вращения двигателя 11. А именно, как обозначено в столбцах восьмого режима движения на Фиг. 50, отношение скоростей ENG представляет собой «повышающую передачу», и отношение скоростей MG1 представляет собой «прямое соединение». Также в этом случае выходной крутящий момент двигателя 11 делится на сторону первого электродвигателя 12 и на сторону выходной шестерни 16. Второй электродвигатель 13 производит движущую силу для вращения в положительном направлении. Движущая сила, подаваемая от второго электродвигателя 13, передается на ведомую шестерню 53 и добавляется к движущей силе, передаваемой от двигателя 11, на ведомой шестерне 53. Далее получающаяся движущая сила передается на ведущие колеса 37.
[0122] Фиг. 53 представляет собой номограмму, показывающую рабочие условия девятого режима движения, указанного на Фиг. 50. Как показано на Фиг. 53, девятый режим движения представляет собой гибридный режим и устанавливается путем включения первого механизма 17 сцепления и третьего механизма 68 сцепления. Рабочие условия девятого режима движения являются такими же или подобны рабочим условиям шестого режима движения, который описан выше со ссылкой на Фиг. 46, и в связи с этим не будут подробно описываться.
[0123] Фиг. 54 представляет собой номограмму, показывающую рабочие условия одиннадцатого режима движения, указанного на Фиг. 50. Как показано на Фиг. 54, одиннадцатый режим движения представляет собой гибридный режим и устанавливается путем включения второго тормозного механизма 66 и третьего механизма 68 сцепления. В этом случае вращение первой солнечной шестерни 40 и второго водила 48 предотвращается вторым тормозным механизмом 66, который находится во включенном состоянии, и первая кольцевая шестерня 42 соединяется со второй кольцевой шестерней 49 и выходной шестерней 16, выполненной как одно целое со второй кольцевой шестерней 49, посредством третьего механизма 68 сцепления. В первом планетарном зубчатом механизме 14 движущая сила, производимая двигателем 11, передается на первое водило 41, и вращение первой солнечной шестерни 40 предотвращается; в связи с этим противодействующая сила, вынуждающая первый электродвигатель 12 функционировать как генератор, прикладывается к первой кольцевой шестерне 42. Во втором планетарном зубчатом механизме 15 движущая сила, производимая двигателем 11, передается на вторую кольцевую шестерню 49 и выходную шестерню 16, выполненную как одно целое с шестерней 49, через первое водило 41 так, чтобы вращать их в положительном направлении. Первый электродвигатель 12 и вторая кольцевая шестерня 49 вращаются на более высокой скорости вращения, чем скорость вращения двигателя 11. А именно, как указано в столбцах одиннадцатого режима движения на Фиг. 50, отношение скоростей ENG представляет собой «повышающую передачу», и отношение скоростей MG1 представляет собой «прямое соединение». Также в этом случае выходной крутящий момент двигателя 11 делится на сторону первого электродвигателя 12 и на сторону выходной шестерни 16. Во втором планетарном зубчатом механизме 15 вторая солнечная шестерня 47 вращается вхолостую в отрицательном направлении, поскольку первый тормозной механизм 18 выключен, в сравнении с восьмым режимом движения, который описан выше со ссылкой на Фиг. 55. Второй электродвигатель 13 производит движущую силу для вращения в положительном направлении. Движущая сила, производимая вторым электродвигателем 13, передается на ведомую шестерню 53 и добавляется к движущей силе, передаваемой от двигателя 11, на ведомой шестерне 53. Далее получающаяся в результате движущая сила передается на ведущие колеса 37.
[0124] Фиг. 55 представляет собой номограмму, показывающую рабочие условия десятого режима движения, который описан выше со ссылкой на Фиг. 50. Как показано на Фиг. 55, десятый режим движения представляет собой режим привода с обоими электродвигателями в качестве одного типа режима EV и устанавливается путем включения только третьего механизма 68 сцепления. Когда устанавливается десятый режим движения, первый электродвигатель 12 приводится в действие как электродвигатель, и движущая сила, производимая первым электродвигателем 12, непосредственно передается от первой кольцевой шестерни 42 на вторую кольцевую шестерню 49. Во втором планетарном зубчатом механизме 15, поскольку первый тормозной механизм 18 и второй тормозной механизм 66 соответственно выключены, вторая солнечная шестерня 47 и второе водило 48 вращаются вхолостую и не функционируют для передачи крутящего момента на первый планетарный зубчатый механизм 14. Отношение скоростей как отношение скорости вращения ротора 45 первого электродвигателя 12 к скорости вращения выходной шестерни 16 составляет «1:1», что представляет собой отношение скоростей прямого соединения. Таким образом, движущая сила, производимая первым электродвигателем 12, передается на выходную шестерню 16 на той же скорости вращения. Через ведомую шестерню 53 на ведущие колеса 37 передается движущая сила, соответствующая движущей силе, производимой первым электродвигателем 12, и движущей силе, производимой вторым электродвигателем 13.
[0125] Фиг. 56 представляет собой номограмму, показывающую рабочие условия седьмого режима движения, указанного на Фиг. 50. Как показано на Фиг. 56, седьмой режим движения представляет собой последовательный гибридный режим и устанавливается путем включения только второго тормозного механизма 66. В первом планетарном зубчатом механизме 14 движущая сила, производимая двигателем 11, передается на первое водило 41, и вращение первой солнечной шестерни 40 предотвращается; в связи с этим противодействующая сила, которая вынуждает первый электродвигатель 12 функционировать как генератор, прикладывается к первой кольцевой шестерне 42. Второй электродвигатель 13 приводится в действие как электродвигатель, используя электрическую энергию, генерируемую первым электродвигателем 12. Крутящий момент, производимый вторым электродвигателем 13, передается на ведущие колеса 37. Также часть крутящего момента, производимого вторым электродвигателем 13, передается на выходную шестерню 16 и вторую кольцевую шестерню 49. Поскольку первый тормозной механизм 18 выключается, и вторая солнечная шестерня 47 вращается вхолостую, второй планетарный зубчатый механизм 15 не функционирует для передачи крутящего момента, принимаемого от выходной шестерни 16, на первый планетарный зубчатый механизм 14.
[0126] Таким образом, в случае системы 71 привода четыре дополнительных режима движения, т.е. с восьмого по одиннадцатый режимы движения, могут быть установлены при обеспечении системы 65 привода, показанной на Фиг. 36, например, третьим механизмом 68 сцепления. Конструкция и функции, свойственные одиннадцатому варианту выполнения, который описан выше со ссылкой на Фиг. 48-56, например, конструкция, дополнительно включающая в себя второй тормозной механизм 66 и третий механизм 68 сцепления, и ее функции, также могут быть применены к другим вариантам выполнения.
[0127] Далее будет описана система привода по двенадцатому варианту выполнения. Фиг. 57 представляет собой принципиальную схему, конкретно иллюстрирующую систему 73 привода в качестве одного примера системы 71 привода, показанной на Фиг. 48. Первый планетарный зубчатый механизм 14 системы 73 привода, показанной на Фиг. 57, состоит из первого водила 41 в качестве одного примера первого входного элемента 22, первой кольцевой шестерни 42 в качестве одного примера первого элемента 23 противодействующей силы и первой солнечной шестерни 40 в качестве одного примера первого выходного элемента 24. Первое водило 41 первого планетарного зубчатого механизма 14 вращается, удерживая первые планетарные шестерни 43, которые находятся в зацеплении с первой солнечной шестерней 40 и первой кольцевой шестерней 42. Система 73 привода имеет второй планетарный зубчатый механизм 15а в виде планетарного зубчатого механизма с двойными планетарными шестернями. Второй планетарный зубчатый механизм 15а имеет второе водило 48a, которое вращается, удерживая вторые планетарные шестерни 50a, которые находятся в зацеплении со второй солнечной шестерней 47a, и третьи планетарные шестерни 50b, которые находятся в зацеплении со вторыми планетарными шестернями 50a и второй кольцевой шестерней 49a. Второй планетарный зубчатый механизм 15а, относящийся к типу с двойными планетарными шестернями, который описан выше, состоит из второго водила 48a в качестве одного примера второго входного элемента 26, второй солнечной шестерни 47a в качестве одного примера второго элемента 28 противодействующей силы и второй кольцевой шестерни 49a в качестве одного примера второго выходного элемента 27.
[0128] Первый механизм 17 сцепления выборочно соединяет первое водило 41 со второй солнечной шестерней 47a. Третий механизм 68 сцепления выборочно соединяет первую кольцевую шестерню 42 со второй кольцевой шестерней 49a. Первый тормозной механизм 18 выборочно прикрепляет вторую солнечную шестерню 47a к неподвижному элементу 29. Второй тормозной механизм 66 выборочно прикрепляет второе водило 48a к неподвижному элементу 29.
[0129] В то время как второй планетарный зубчатый механизм 15а с двойными планетарными шестернями используется в системе 73 привода, показанной на Фиг. 57, второй планетарный зубчатый механизм с одинарными планетарными шестернями может использоваться вместо второго планетарного зубчатого механизма 15а с двойными планетарными шестернями. В этом случае первый тормозной механизм 18 выборочно прикрепляет вторую солнечную шестерню второго планетарного зубчатого механизма с одинарными планетарными шестернями к неподвижному элементу 29. Первый механизм 17 сцепления выборочно соединяет первое водило 41 со второй солнечной шестерней второго планетарного зубчатого механизма с одинарными планетарными шестернями. Третий механизм 68 сцепления выборочно соединяет первую кольцевую шестерню 42 со вторым водилом второго планетарного зубчатого механизма с одинарными планетарными шестернями. Второй тормозной механизм 66 выборочно прикрепляет вторую кольцевую шестерню второго планетарного зубчатого механизма с одинарными планетарными шестернями к неподвижному элементу 29.
[0130] Фиг. 58 указывает режимы движения, которые могут быть установлены для системы 73 привода, показанной на Фиг. 57. Как показано на Фиг. 58, система 73 привода способна устанавливать любой из с первого режима по одиннадцатый режим движения при изменении состояния включения первого тормозного механизма 18 (BK1), первого механизма 17 сцепления (CL1), второго тормозного механизма (BK2) 66 и третьего механизма 68 сцепления (CL3). Каждый из с первого режима по одиннадцатый режим движения устанавливается при вынуждении ECU 21 осуществлять управление первым тормозным механизмом 18, первым механизмом 17 сцепления, вторым тормозным механизмом 66, третьим механизмом 68 сцепления, двигателем 11, первым электродвигателем 12 и вторым электродвигателем 13. Первый режим движения, второй режим движения, шестой режим движения, седьмой режим движения, восьмой режим движения, девятый режим движения и одиннадцатый режим движения представляют собой примеры гибридных режимов движения. Третий режим движения, четвертый режим движения и десятый режим движения представляют собой примеры режимов EV. Пятый режим движения представляет собой один пример режима парковки. Рабочие условия с первого режима по седьмой режим движения являются такими же или подобны рабочим условиям с первого режима по седьмой режим движения, указанных на Фиг. 32, и в связи с этим подробное описание этих режимов не будет предоставлено.
[0131] Восьмой режим движения, девятый режим движения и одиннадцатый режим движения представляют собой примеры гибридных режимов движения. Восьмой режим движения устанавливается путем включения первого тормозного механизма 18 и третьего механизма 68 сцепления. Номограмма, представляющая скорости вращения вращающихся элементов, которые образуют второй планетарный зубчатый механизм 15а с двойными планетарными шестернями, определяется скоростями вращения соответственных вращающихся элементов, т.е. второй кольцевой шестерни 49a (выходной шестерни 16), второго водила 48a и второй солнечной шестерни 47a. С включенным третьим механизмом 68 сцепления вторая кольцевая шестерня 49a вращается с той же скоростью вращения, что и первый электродвигатель 12. В результате отношение скоростей MG1, представляющее собой отношение скорости вращения выходной шестерни 16 и скорости вращения ротора 45 первого электродвигателя 12, становится равным «1:1», что представляет собой отношение скоростей прямого соединения. Поскольку вращение второй солнечной шестерни 47a предотвращается, и второе водило 48a и первая солнечная шестерня 40 вращаются с одинаковой скоростью вращения, вторая кольцевая шестерня 49a и выходная шестерня 16, выполненная как одно целое со второй кольцевой шестерней 49a, вращаются на более низкой скорости, чем скорость вращения двигателя 11. Таким образом, когда устанавливается восьмой режим движения, отношение скоростей ENG, представляющее собой отношение скорости вращения выходного вала 44 двигателя 11 и скорости вращения выходной шестерни 16, становится отношением скоростей, указывающим уменьшение скорости.
[0132] Девятый режим движения устанавливается путем включения первого механизма 17 сцепления и третьего механизма 68 сцепления. С включенными первым механизмом 17 сцепления и третьим механизмом 68 сцепления выходной вал 44 двигателя 11, первое водило 41 и вторая кольцевая шестерня 49a (выходная шестерня 16) соединяются друг с другом, и крутящий момент, производимый двигателем 11, непосредственно передается на выходную шестерню 16 так, что система 73 привода переводится в состояние непосредственного соединения. Десятый режим движения представляет собой один пример режима EV, в котором транспортное средство движется, используя движущую силу, производимую обоими первым электродвигателем 12 и вторым электродвигателем 13, и устанавливается путем включения только третьего механизма 68 сцепления.
[0133] Фиг. 59 представляет собой номограмму, показывающую рабочие условия одиннадцатого режима движения, указанного на Фиг. 58. Как показано на Фиг. 59, одиннадцатый режим движения представляет собой один пример гибридного режима движения и устанавливается, когда второй тормозной механизм 66 включен, и третий механизм 68 сцепления включен. Рабочие условия одиннадцатого режима движения являются такими же или подобны рабочим условиям седьмого режима движения, который описан выше со ссылкой на Фиг. 47, и в связи с этим их подробное описание не будет предоставлено. Одиннадцатый режим движения отличается от седьмого режима движения тем, что вращение первой солнечной шестерни 40 и второго водила 48a предотвращается вторым тормозным механизмом 66. Когда система 73 привода находится в одиннадцатом режиме движения, первая кольцевая шестерня 42 и второе водило 48 соединяются друг с другом посредством третьего механизма 68 сцепления так, что вторая кольцевая шестерня 49a и первая кольцевая шестерня 42 вращаются с одинаковой скоростью вращения. В связи с этим «Прямое соединение» записывается в столбце отношения скоростей MG1 в одиннадцатом режиме движения, указанном на Фиг. 58. Также, когда система 73 привода находится в одиннадцатом режиме движения, скорость вращения второй кольцевой шестерни 49a постоянно выше, чем скорость вращения двигателя 11; в связи с этим «Повышающая передача» записывается в столбце отношения скоростей ENG.
[0134] В случае системы 74 привода те же или подобные режимы движения, как описанные со ссылкой на Фиг. 50, могут быть установлены при преобразовании системы 72 привода, показанной на Фиг. 49, например, так, что второе водило планетарного зубчатого механизма с двойными планетарными шестернями (вторая кольцевая шестерня в случае планетарного зубчатого механизма с одинарными планетарными шестернями) обеспечивает один пример второго входного элемента 26, и вторая кольцевая шестерня планетарного зубчатого механизма с двойными планетарными шестернями (второе водило в случае планетарного зубчатого механизма с одинарными планетарными шестернями) обеспечивает один пример второго выходного элемента 27. Конструкция и функции, свойственные двенадцатому варианту выполнения, который описан выше со ссылкой на Фиг. 57-59, также могут быть применены к другим вариантам выполнения.
[0135] Как описано выше, в случае системы 72 привода, показанной на Фиг. 49, и системы 73 привода, показанной на Фиг. 57, с пятого режима по одиннадцатый режим движения могут быть установлены при обеспечении системы 34 привода, показанной на Фиг. 2, вторым тормозным механизмом 66 и третьим механизмом 68 сцепления. А именно, с пятого режима по седьмой режим движения могут быть установлены при обеспечении второго тормозного механизма 66, как описано выше со ссылкой на Фиг. 38. Также с седьмого режима по десятый режим движения могут быть установлены при обеспечении третьего механизма 68 сцепления, как описано выше со ссылкой на Фиг. 43 и Фиг. 44. В случае системы 72 привода по одиннадцатому варианту выполнения, показанному на Фиг. 49, и системы 73 привода по двенадцатому варианту выполнения, показанному на Фиг. 57, может быть дополнительно установлен одиннадцатый режим движения в дополнение к с пятого режима по десятый режим движения за счет синергетического эффекта, обеспечиваемого вторым тормозным механизмом 66 и третьим механизмом 68 сцепления.
[0136] Каждый из вышеописанных вариантов выполнения представляет собой лишь пример изобретения, а конструкция и функции, свойственные одному из вариантов выполнения, также могут быть применены к другим вариантам выполнения. Также это изобретение не ограничивается вышеописанными вариантами выполнения и может быть изменено при необходимости без отклонения от задачи изобретения. Например, в то время как изобретение применяется для гибридного транспортного средства, относящегося к типу FF (c передним расположением двигателя, с передним приводом), в вышеописанных вариантах выполнения, изобретение не применяется ограниченно к этому типу транспортного средства и может быть применено к гибридному транспортному средству, относящемуся к типу FR (с задним расположением двигателя, с задним приводом) или к типу 4WD (с полным приводом).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПЕРЕДАЧИ МОЩНОСТИ | 2017 |
|
RU2651953C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2671115C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2644833C1 |
| ГИБРИДНОЕ ПРИВОДНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2007 |
|
RU2410250C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2698607C1 |
| ТРАНСМИССИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2398992C1 |
| ТРАНСПОРТНАЯ ПРИВОДНАЯ СИСТЕМА | 2010 |
|
RU2510337C2 |
| Модуль привода для гибридного транспортного средства | 2018 |
|
RU2683136C1 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2608987C2 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
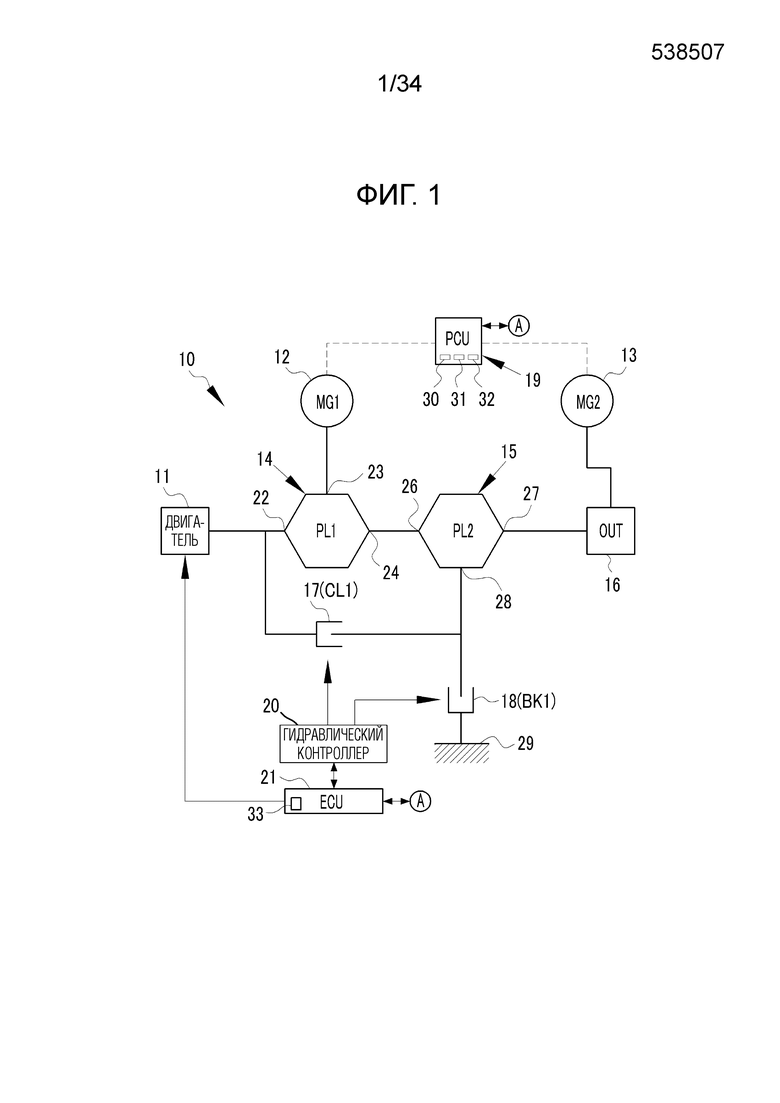
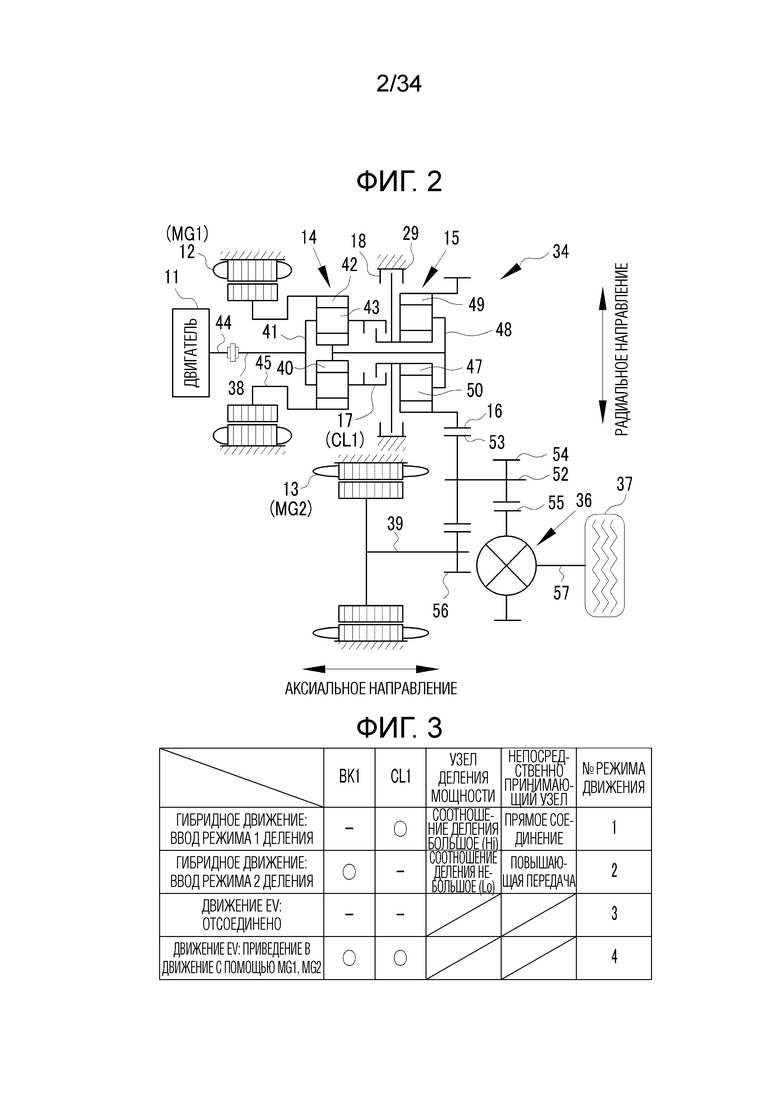
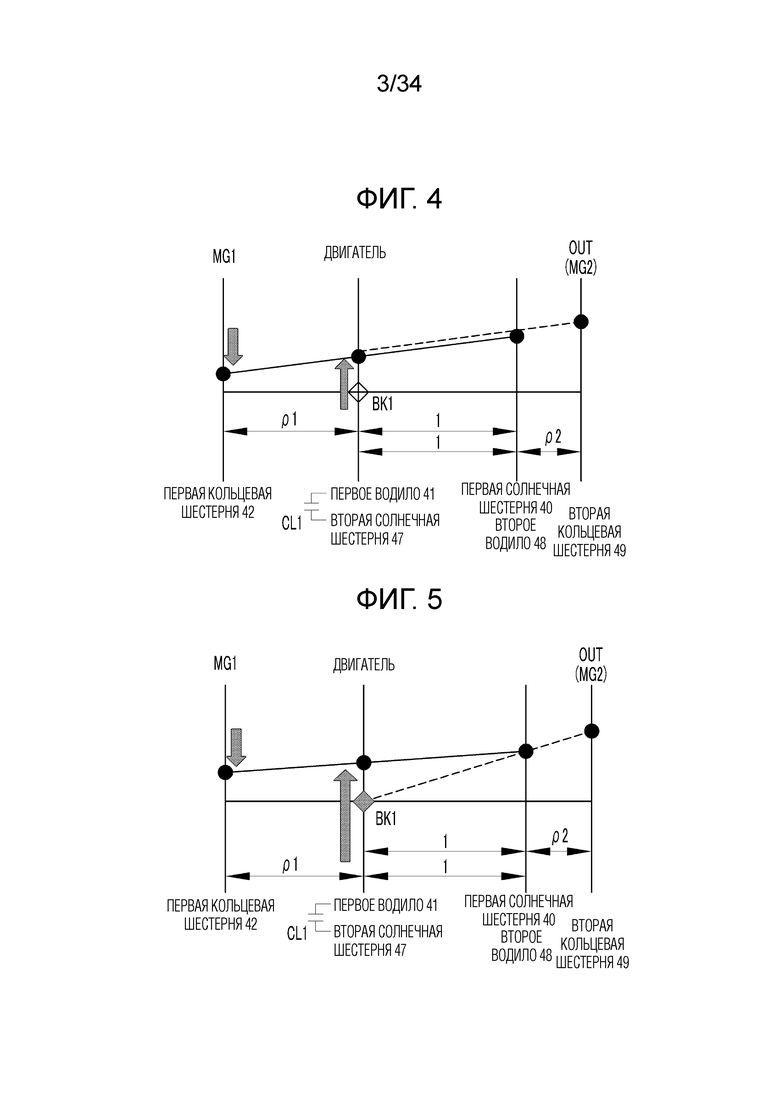
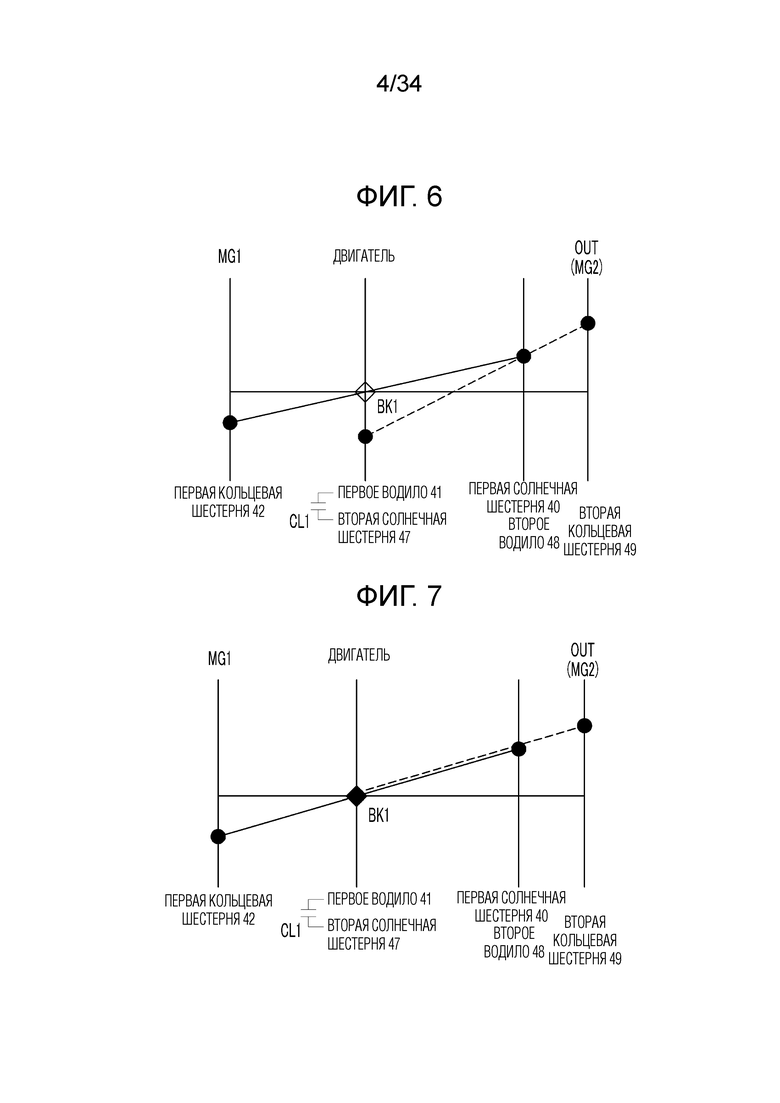
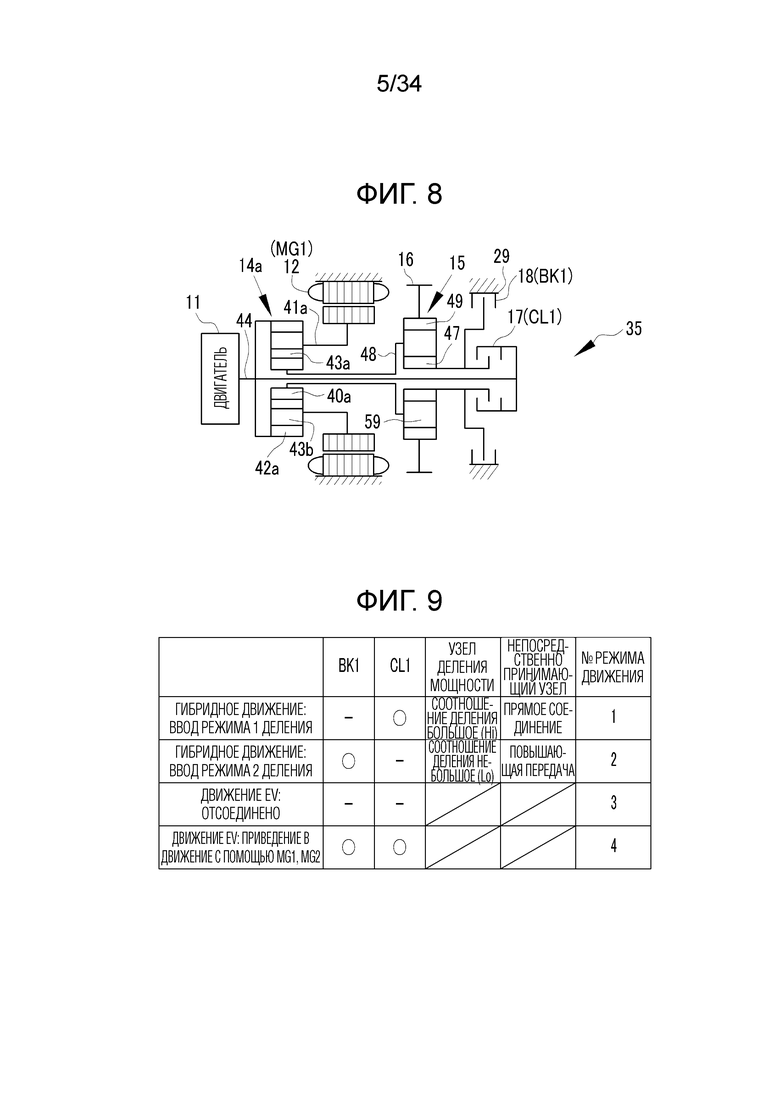
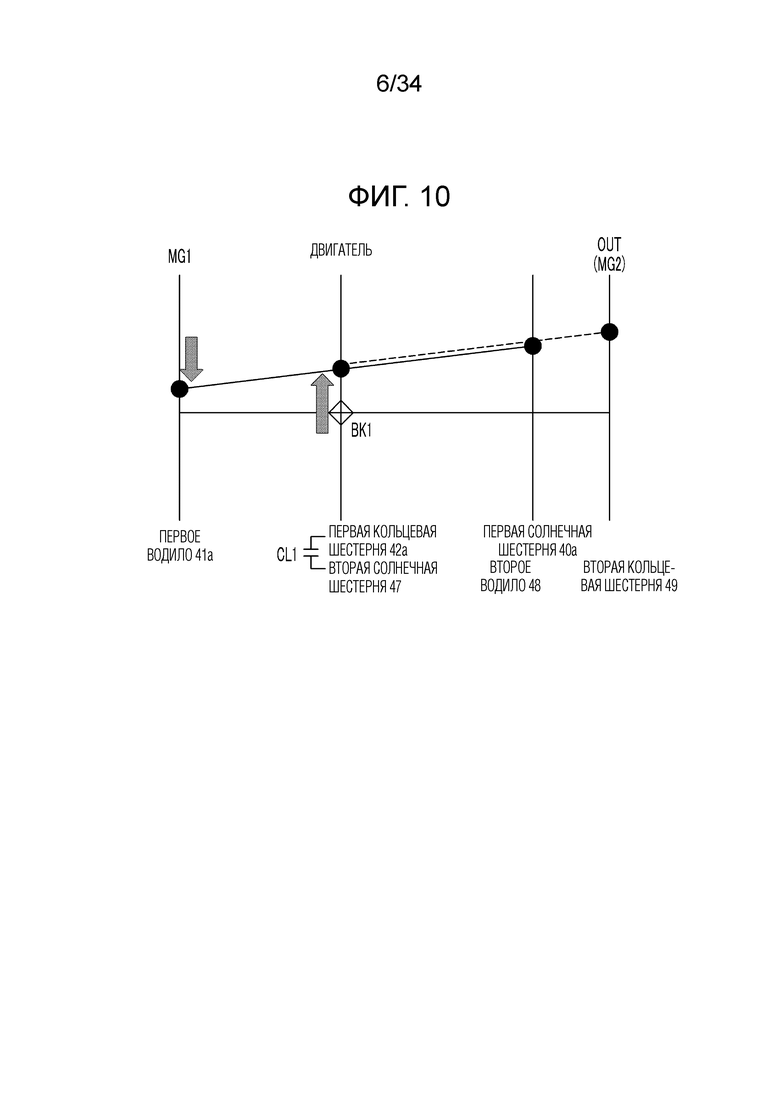
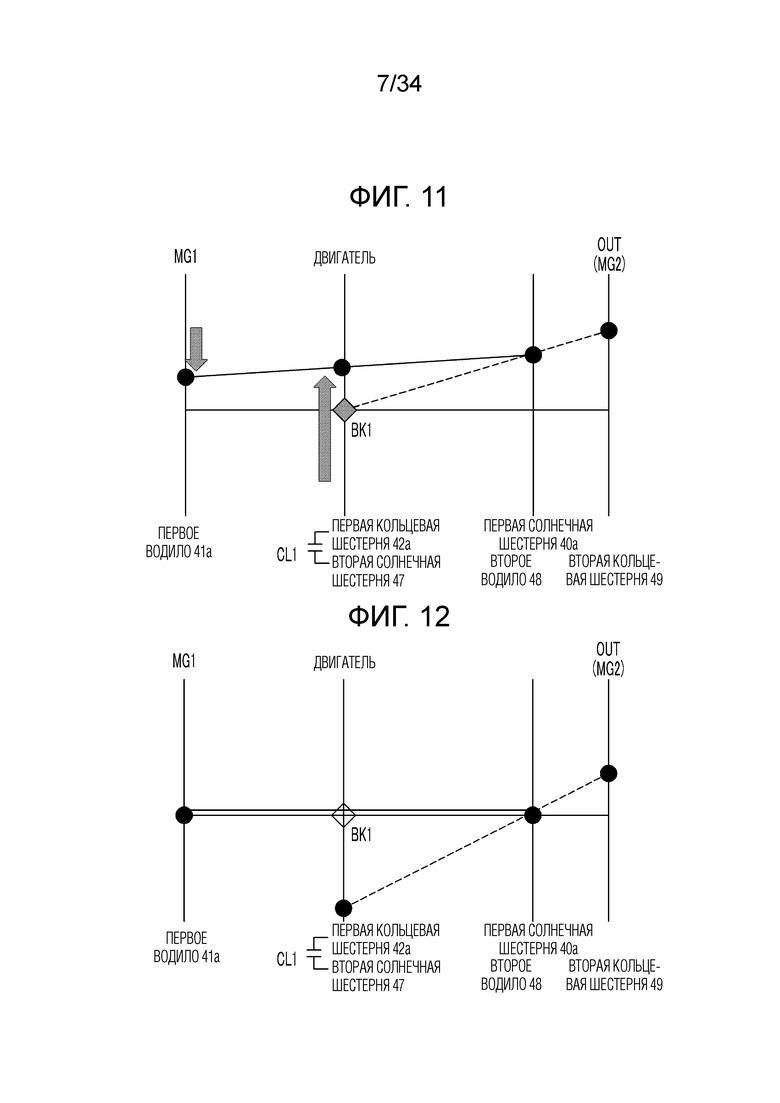
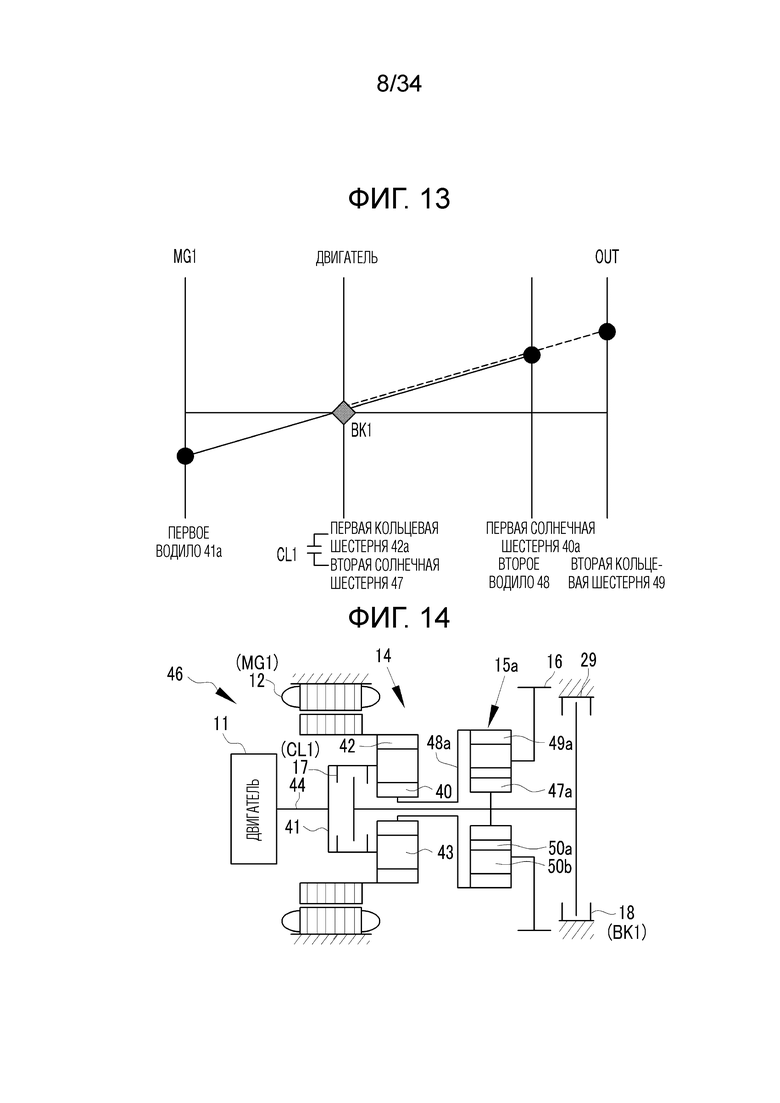
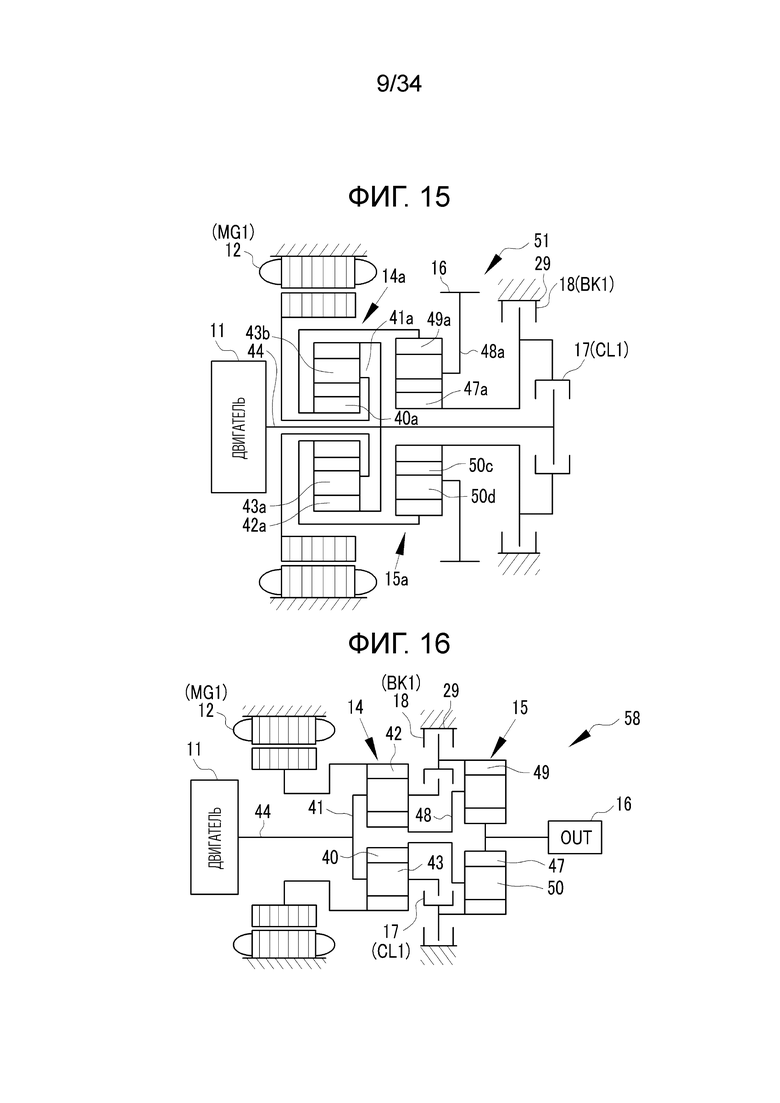
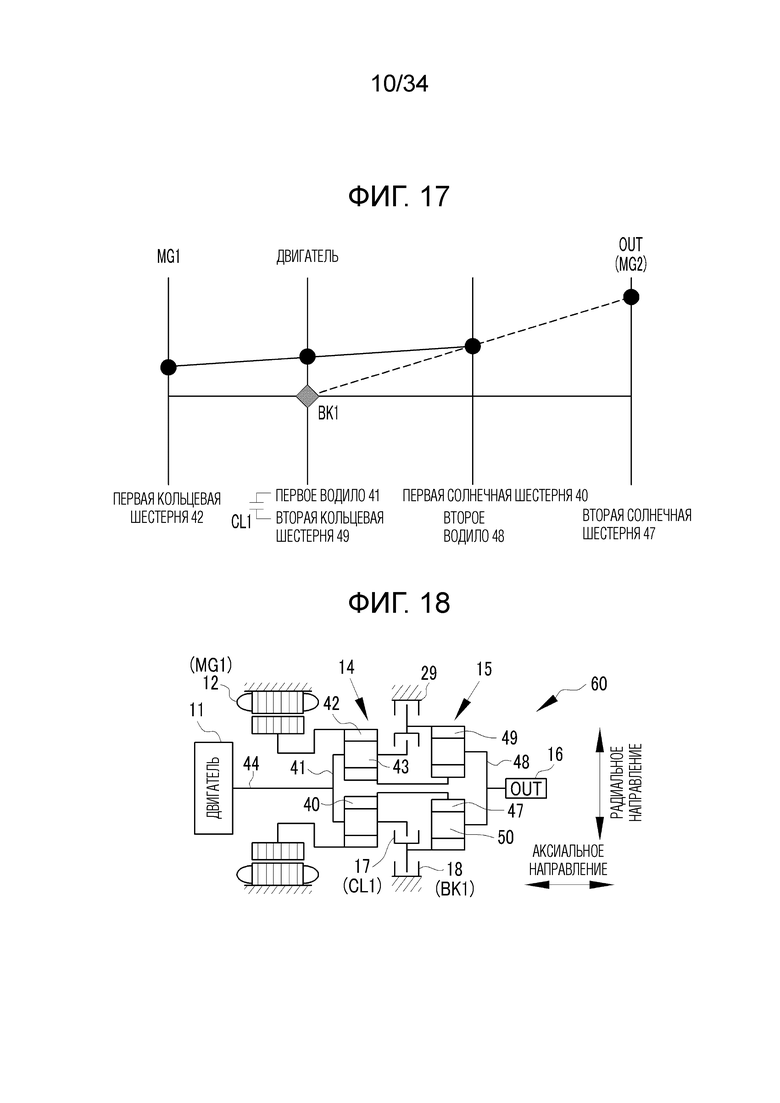
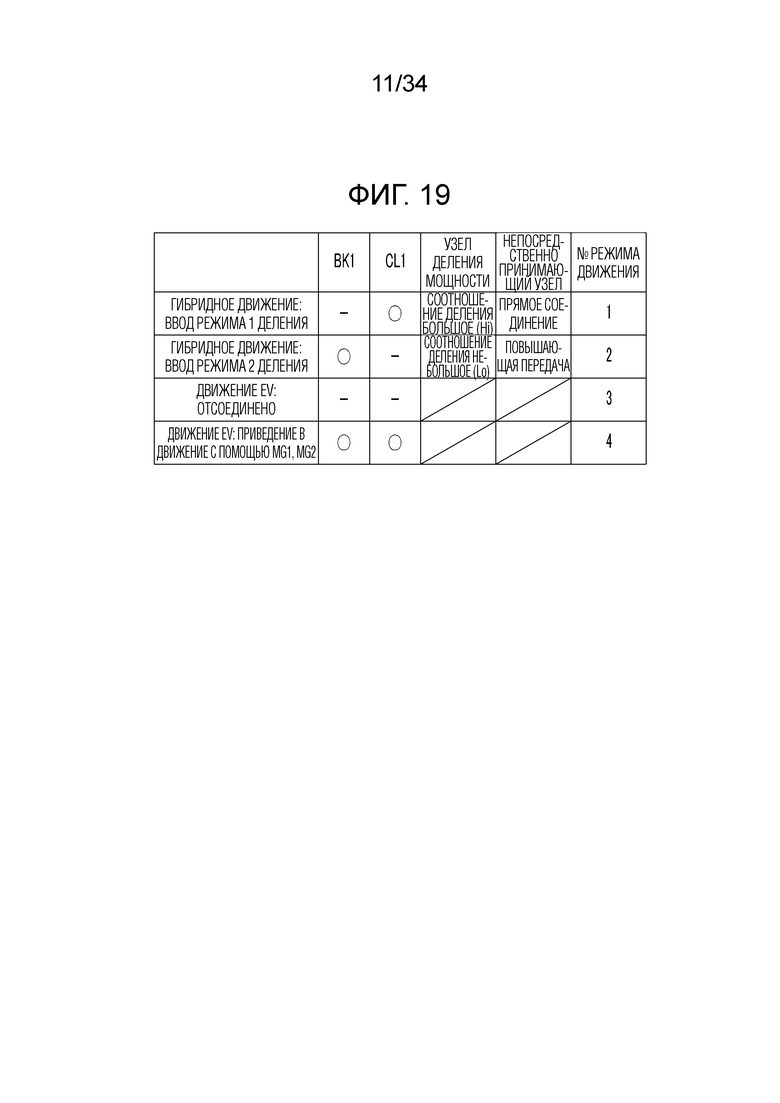
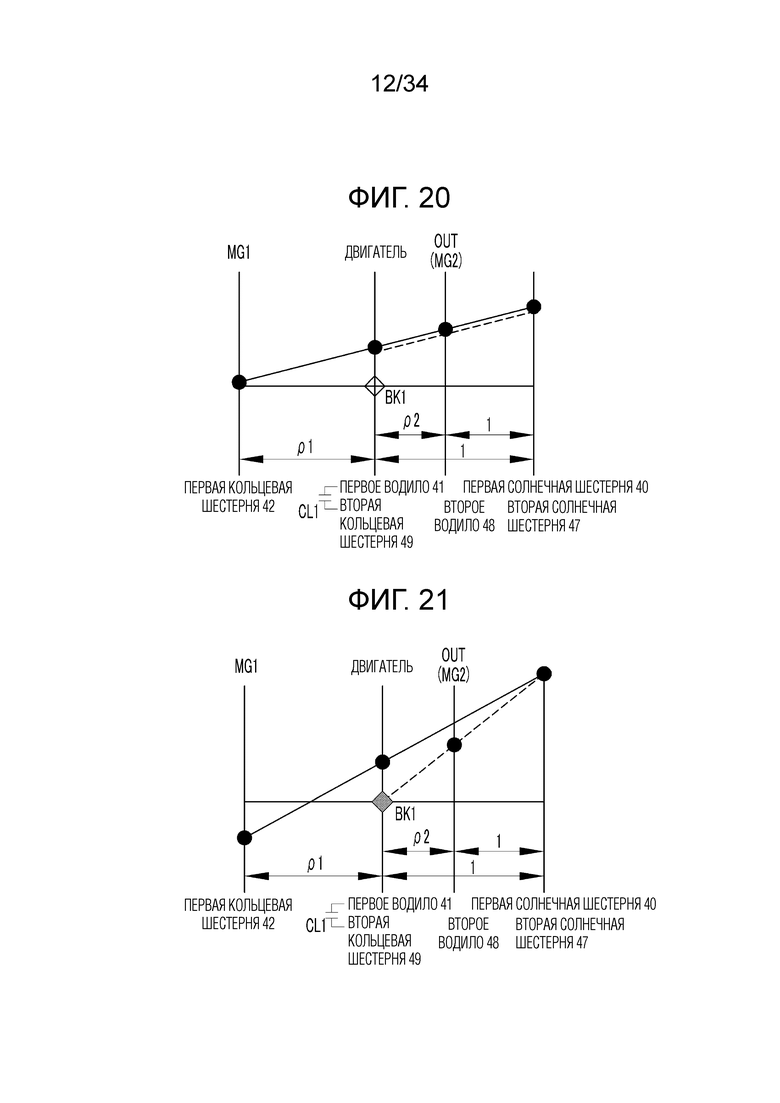
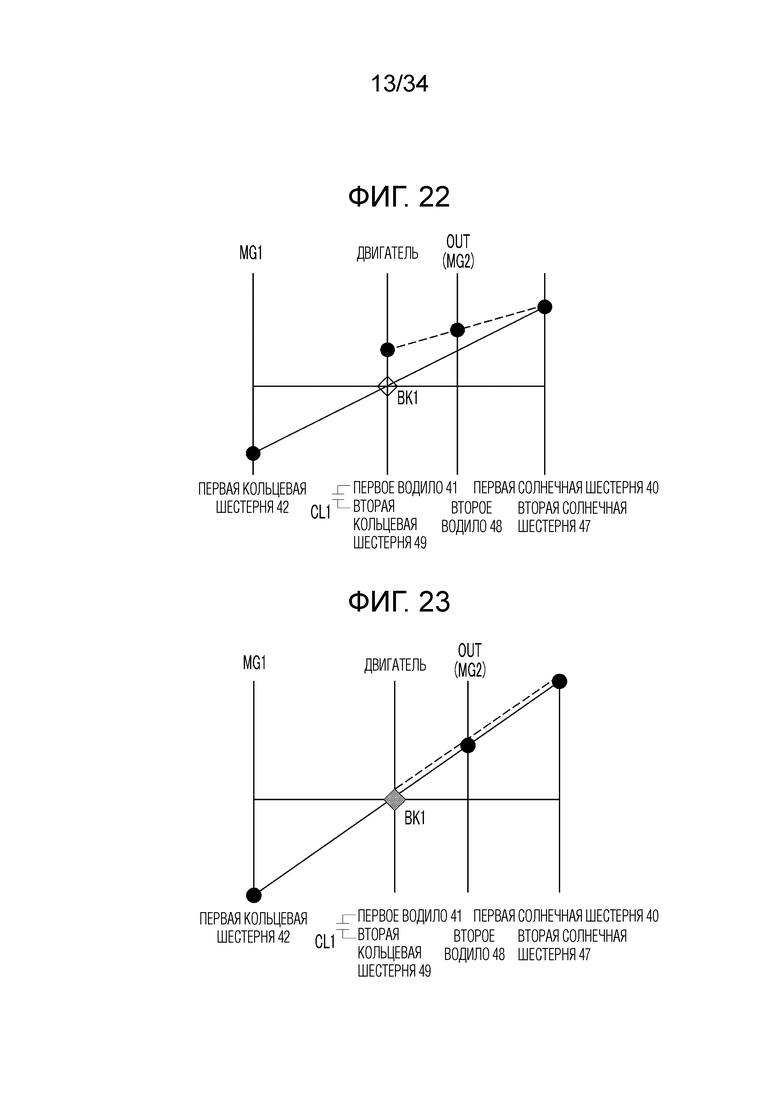
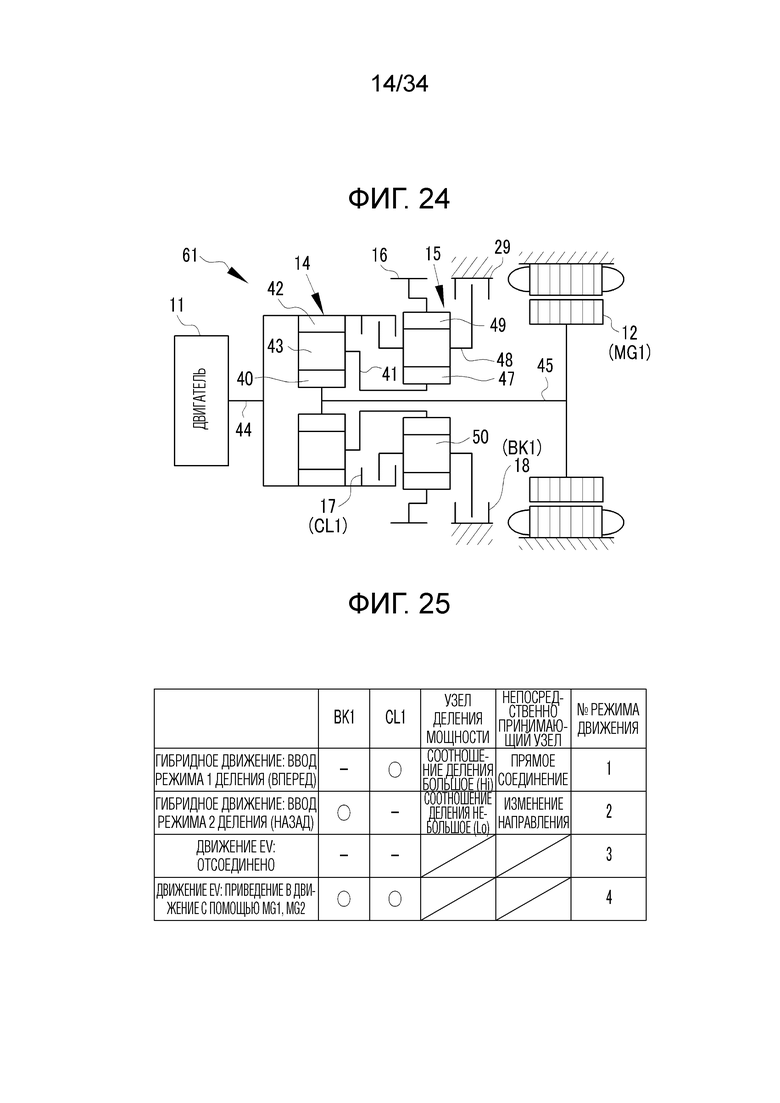
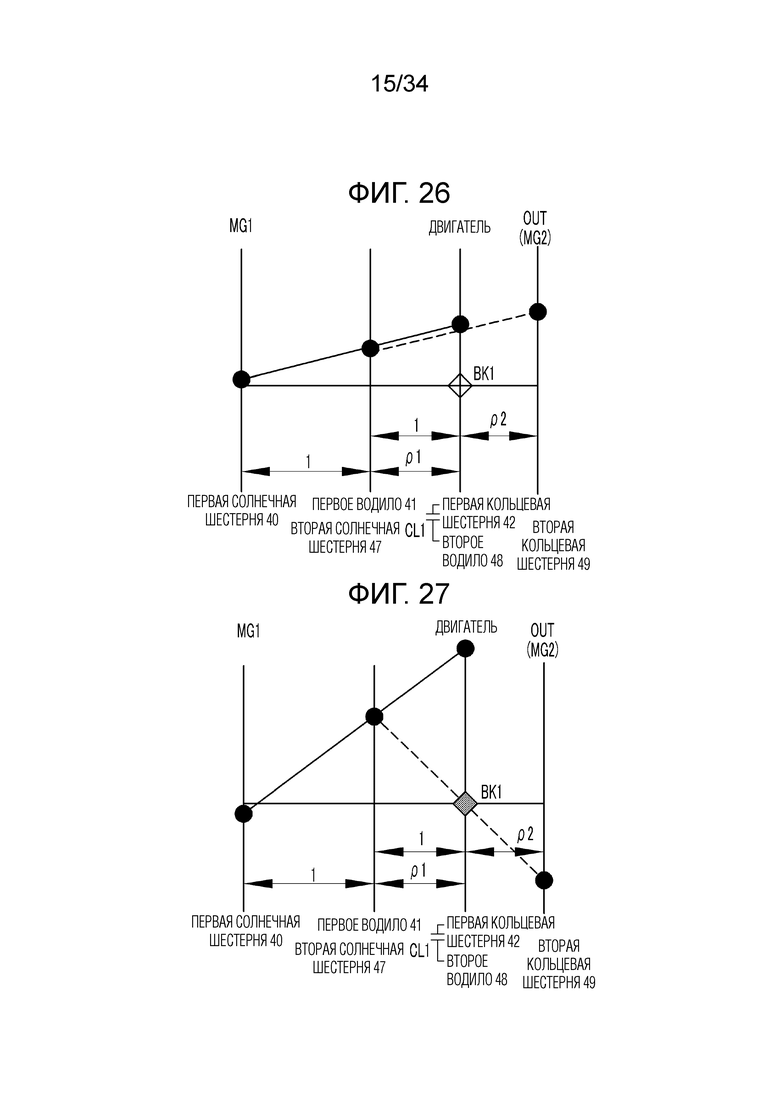
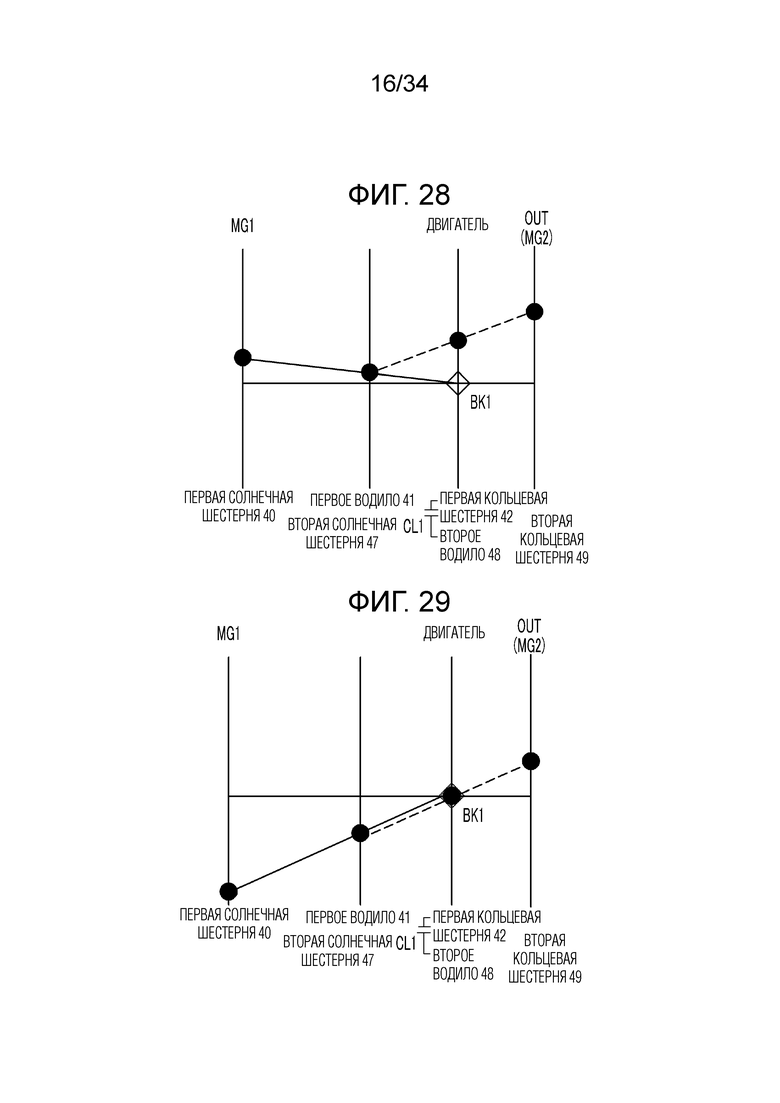
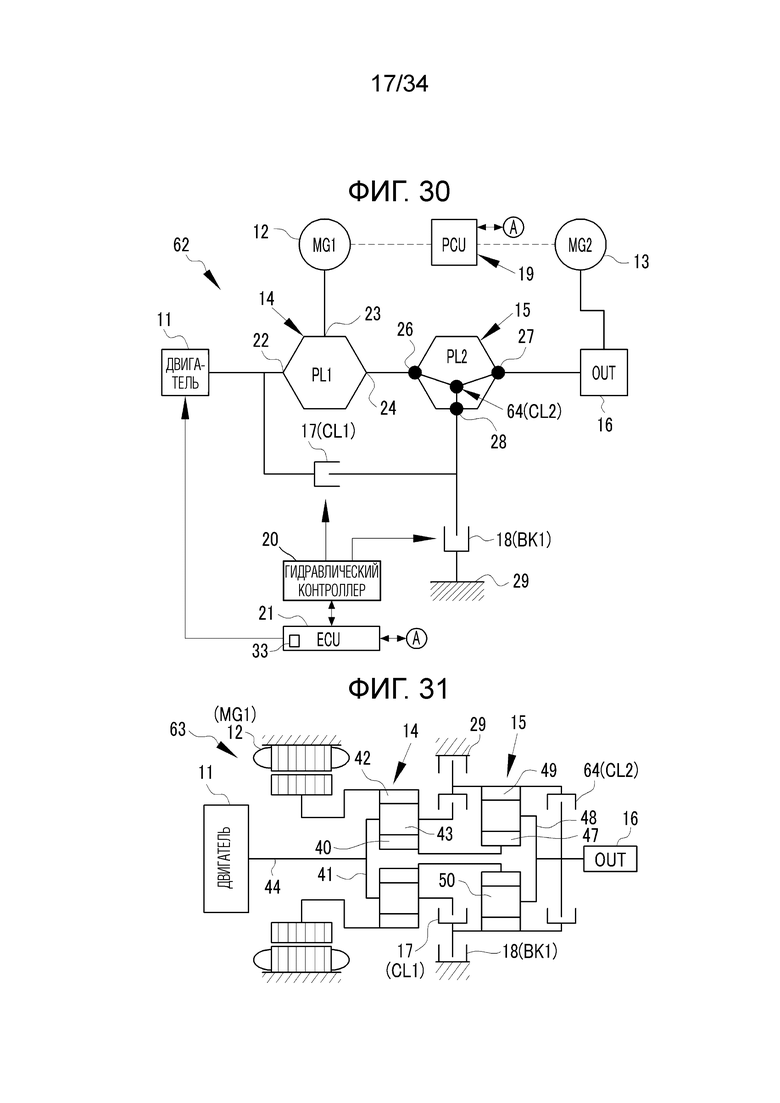
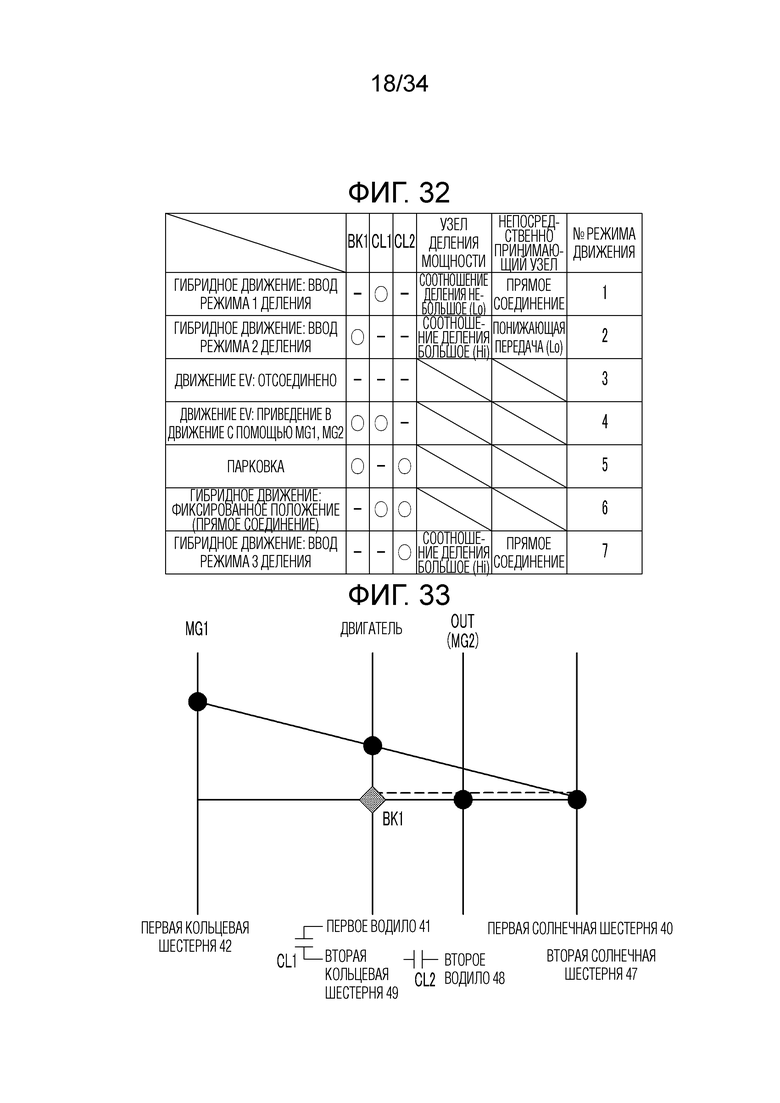
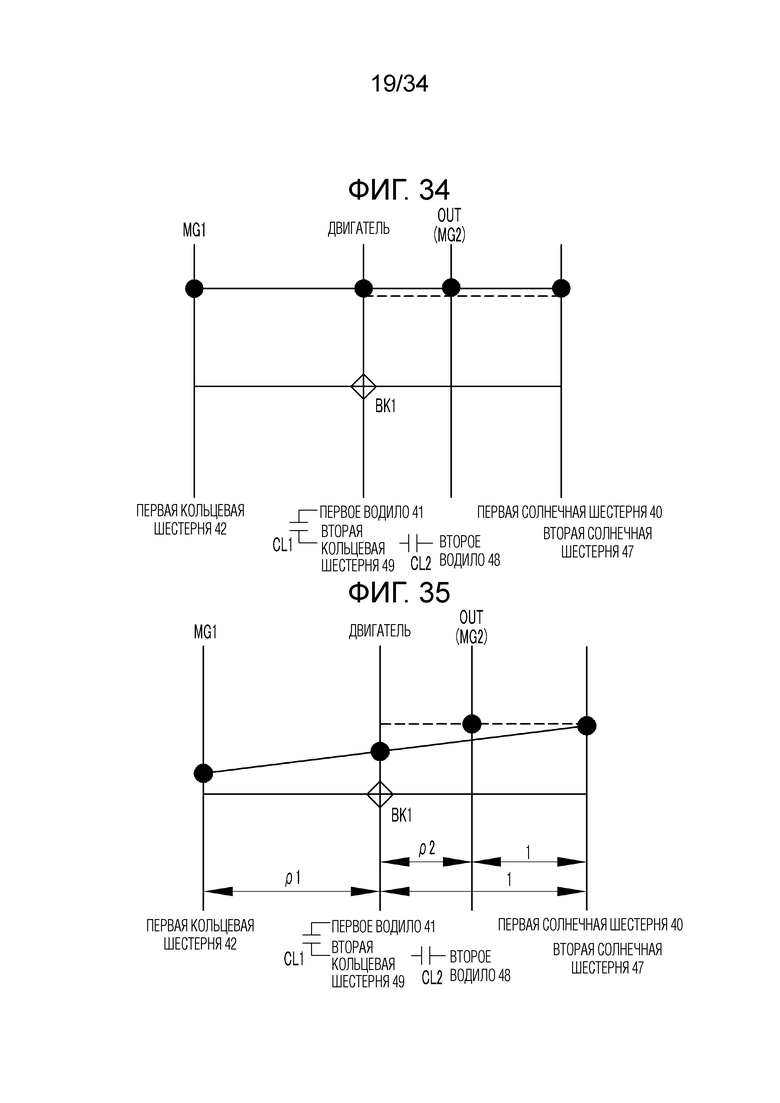
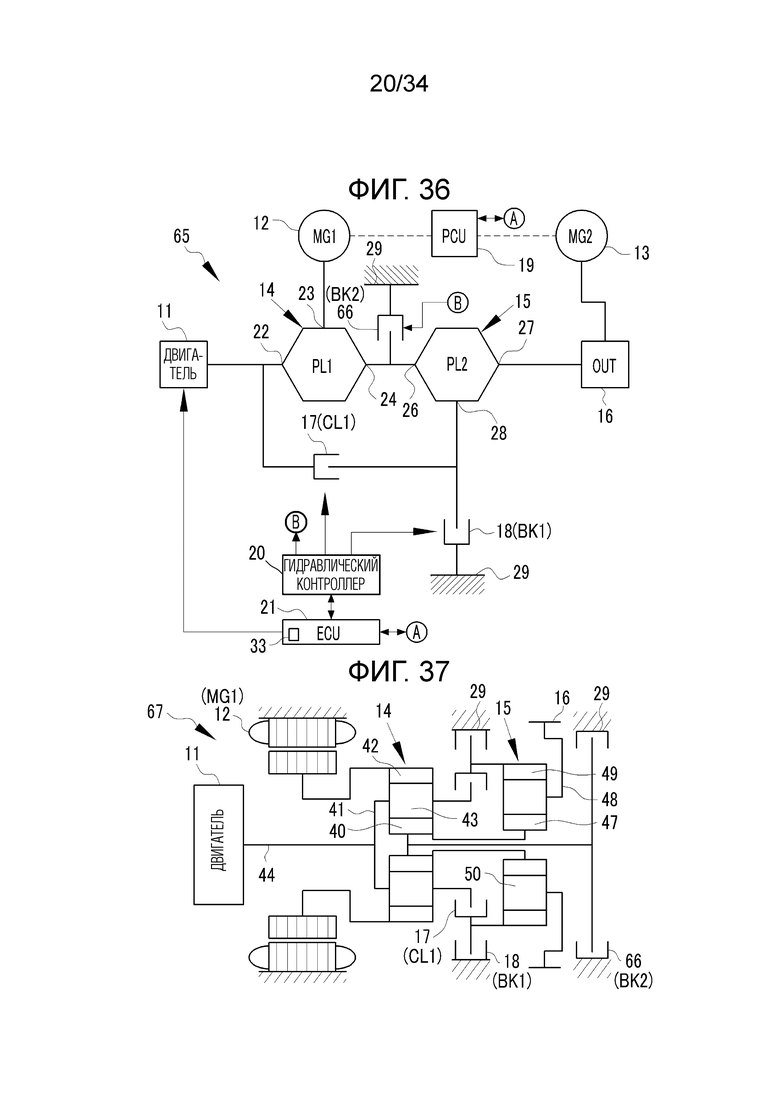
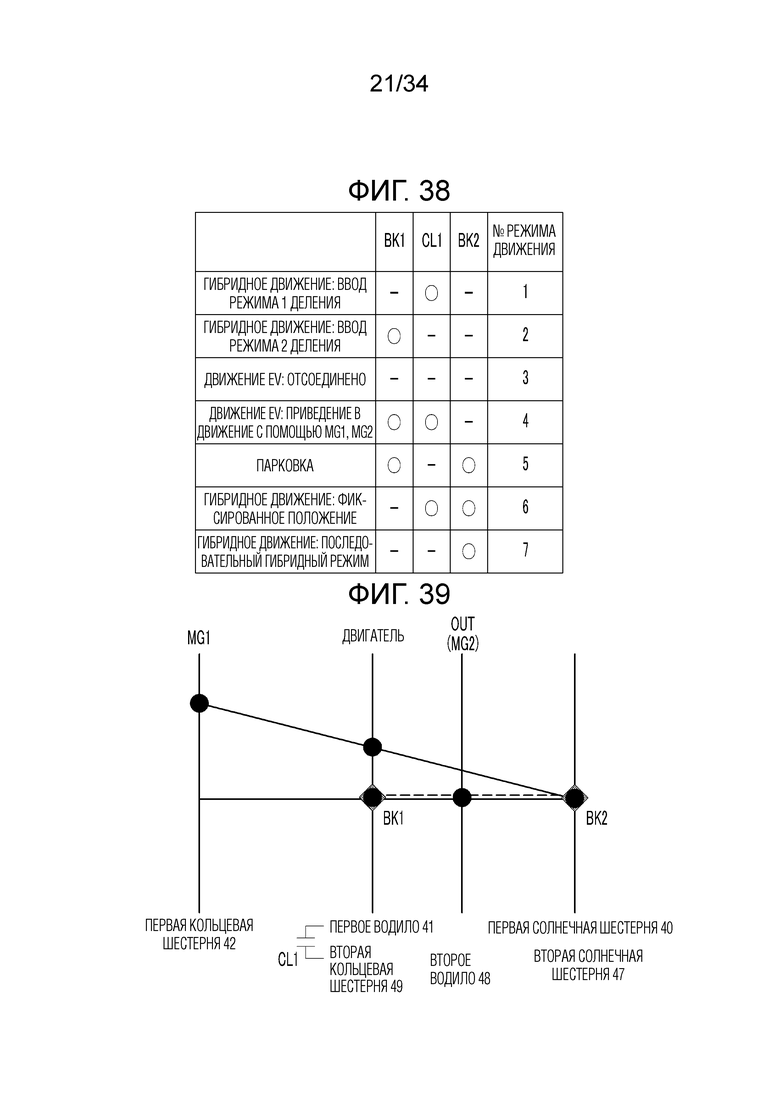
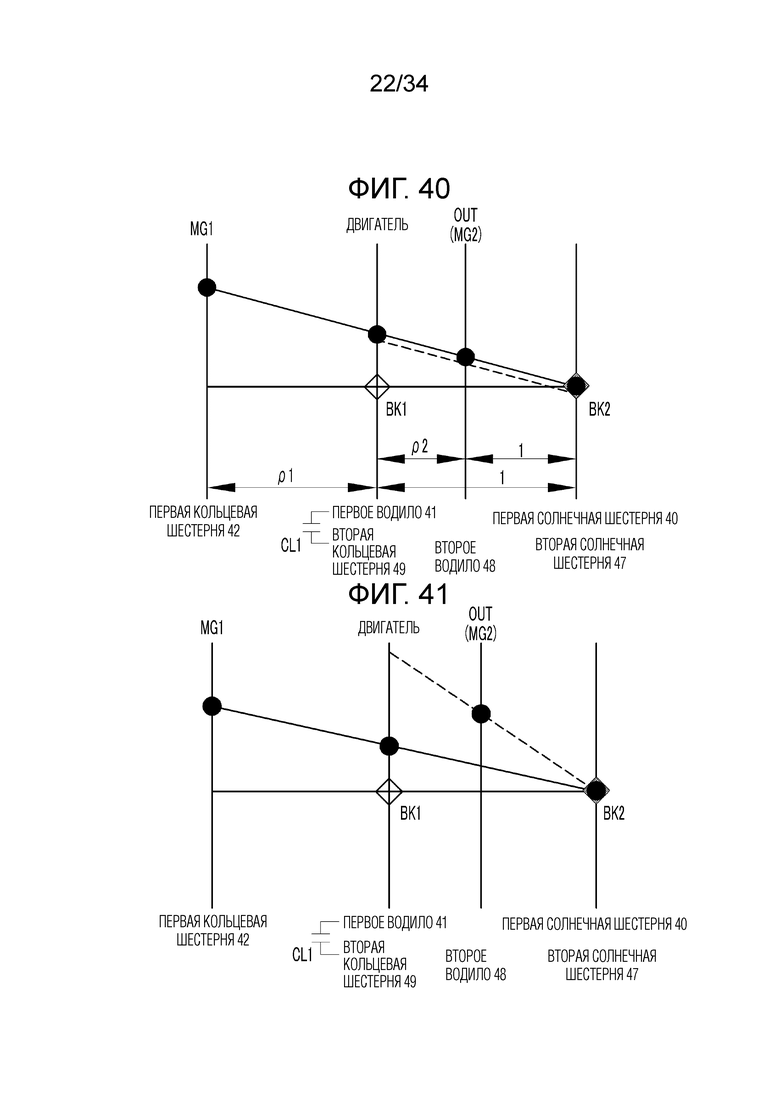
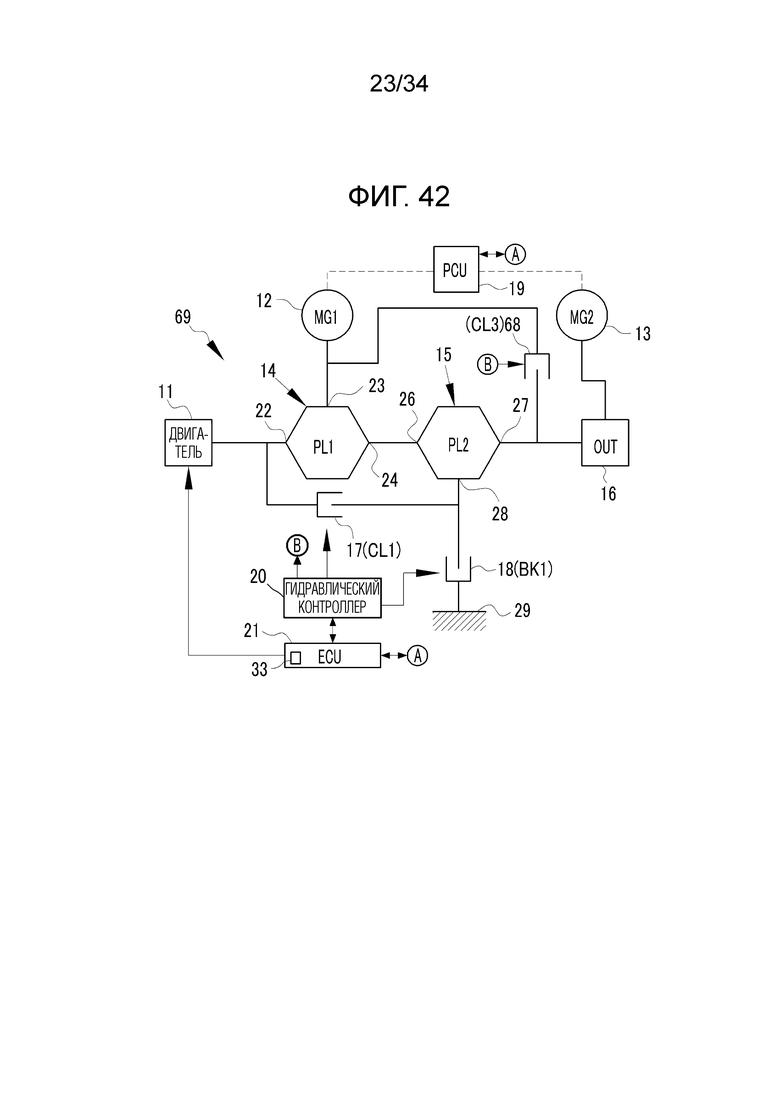
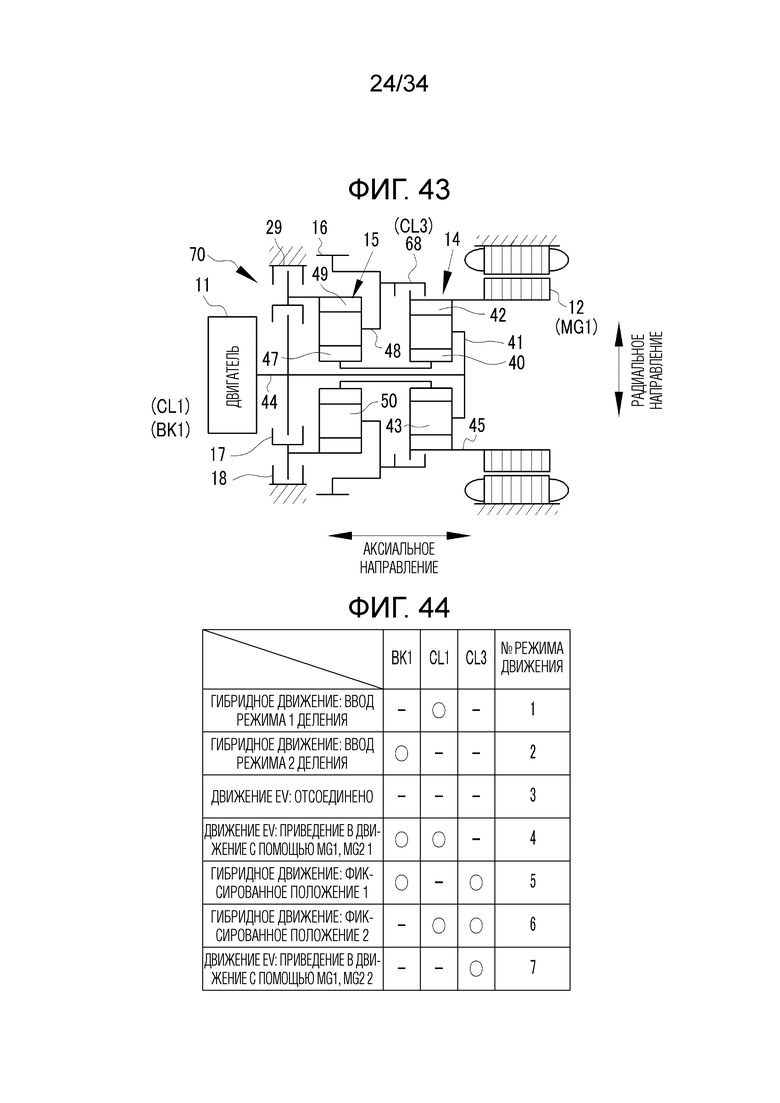
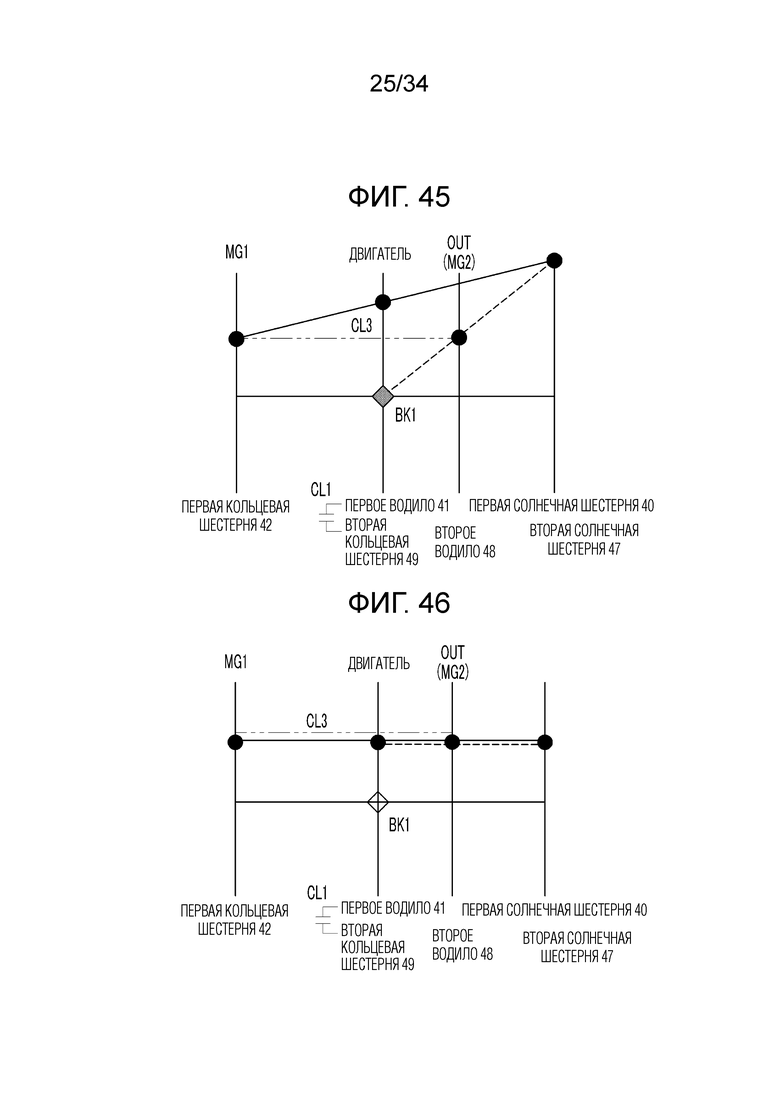
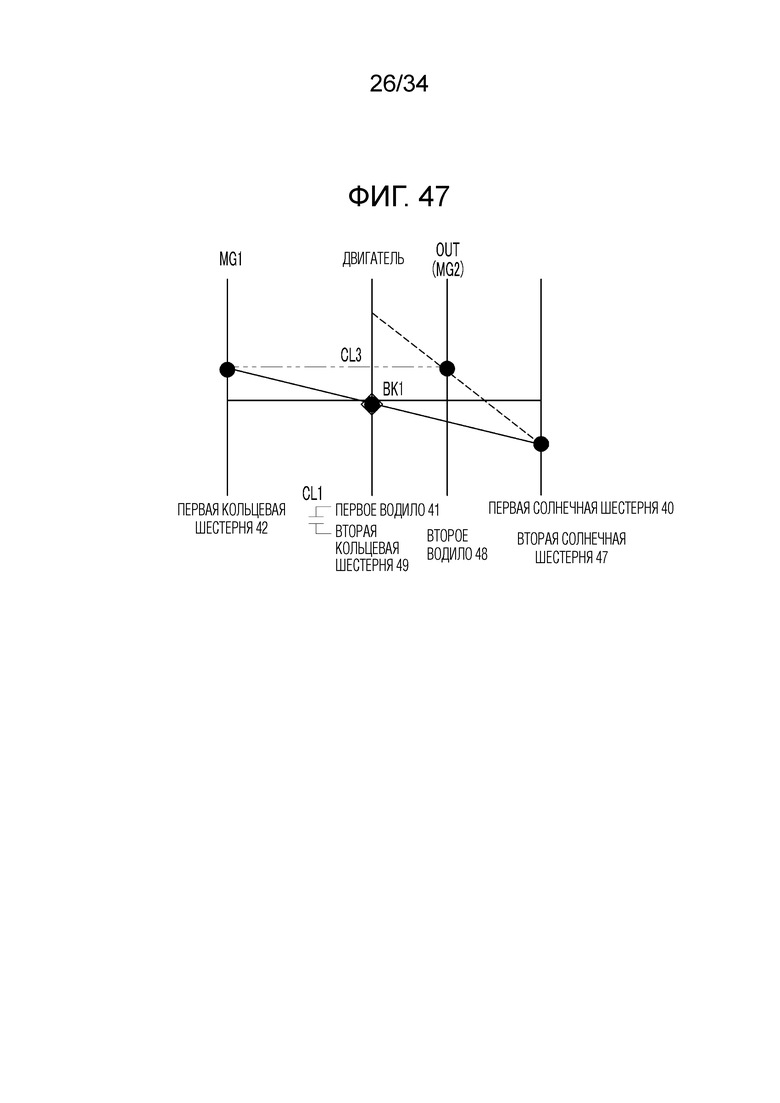
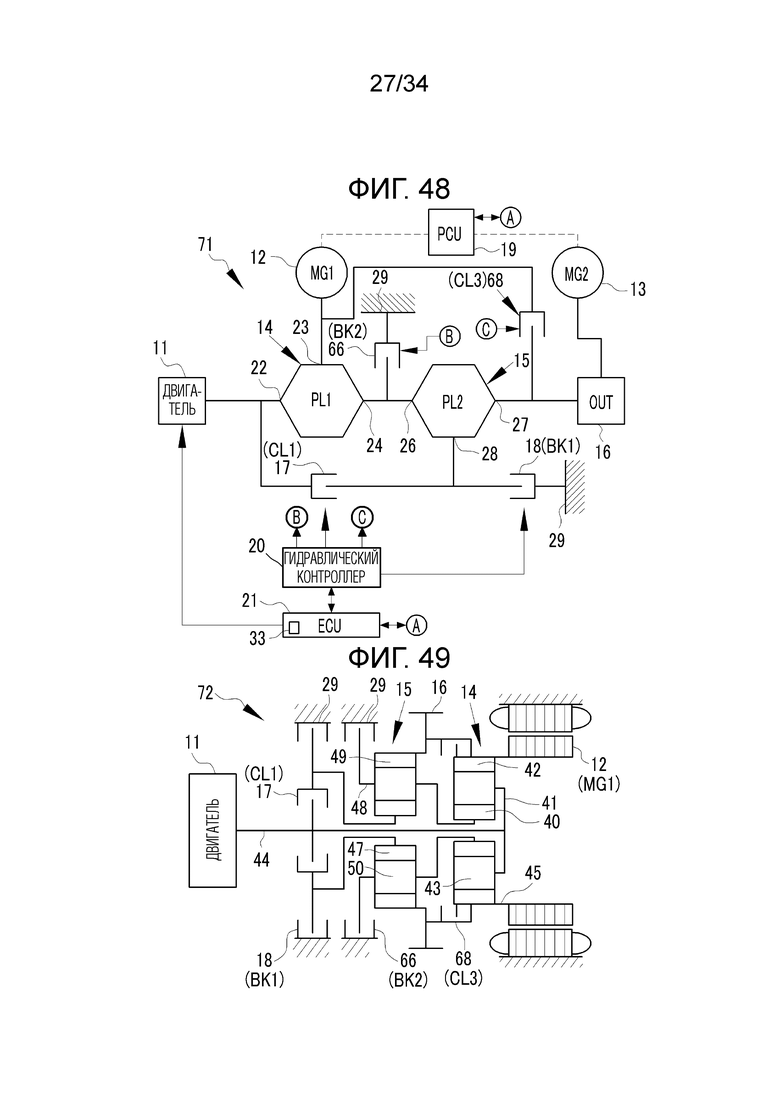
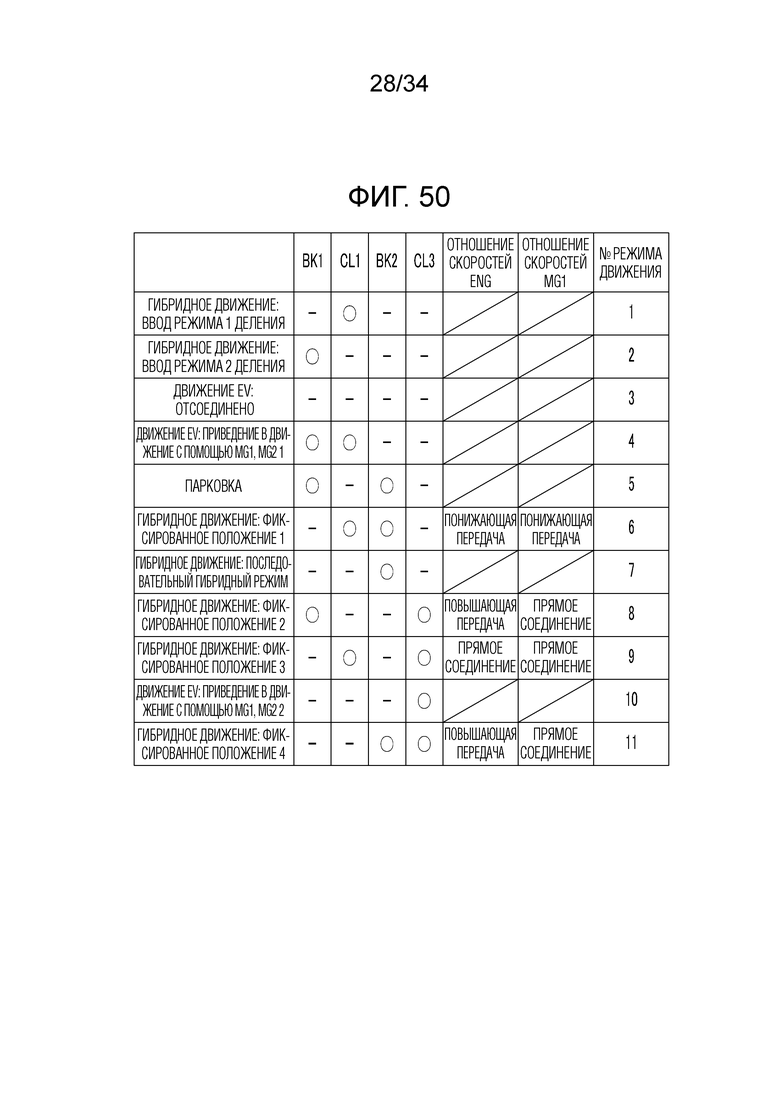
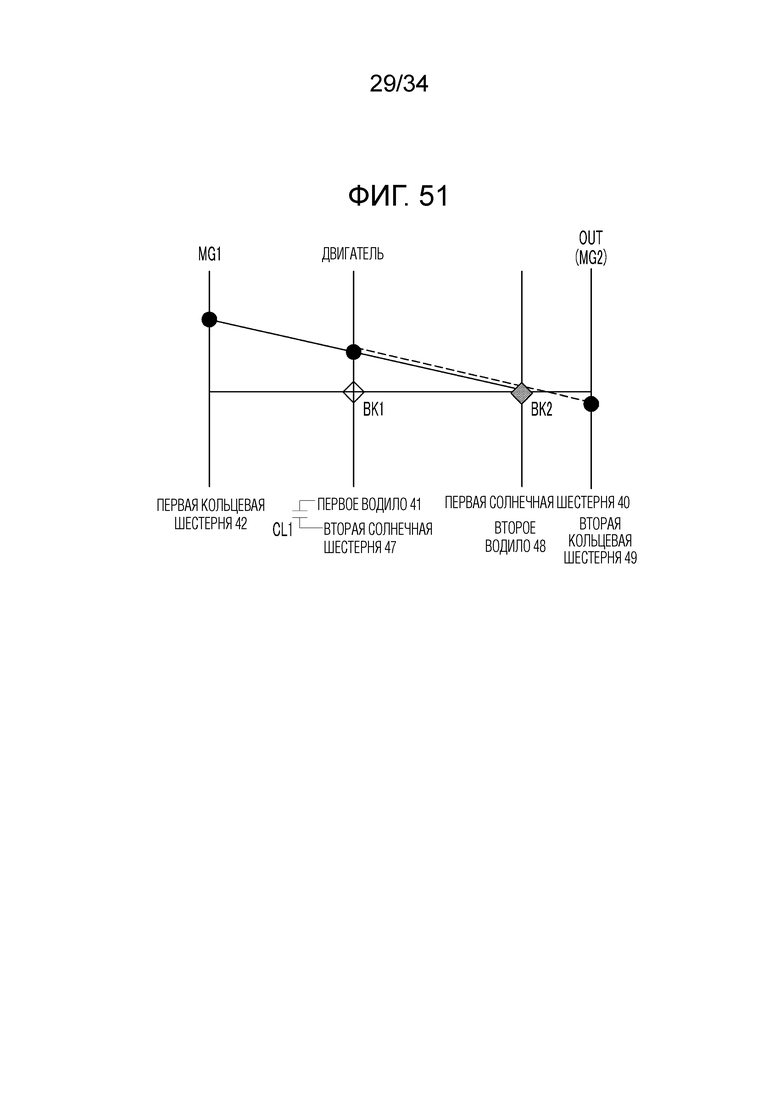
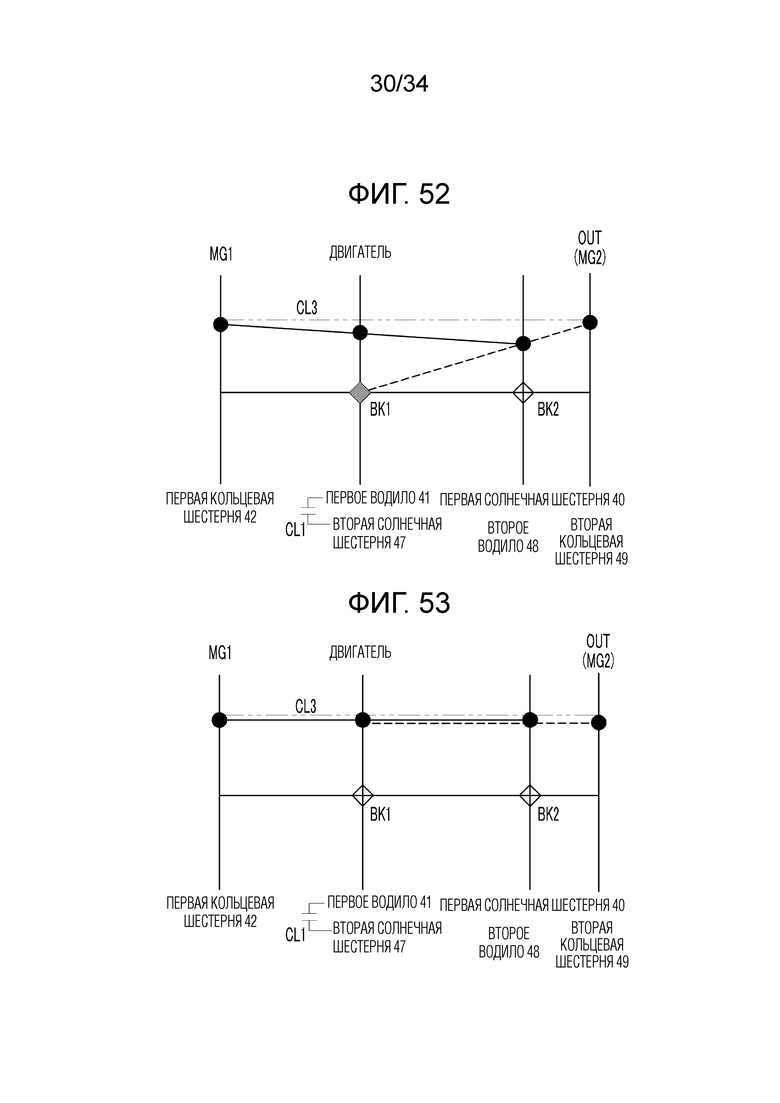
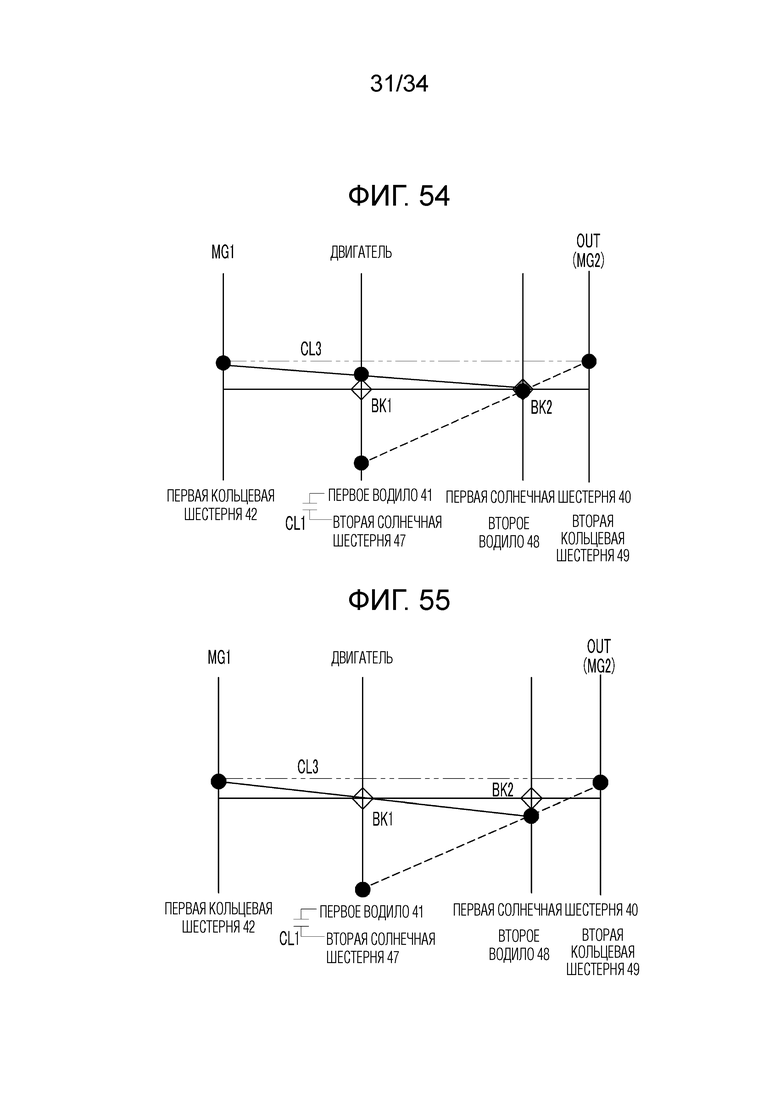
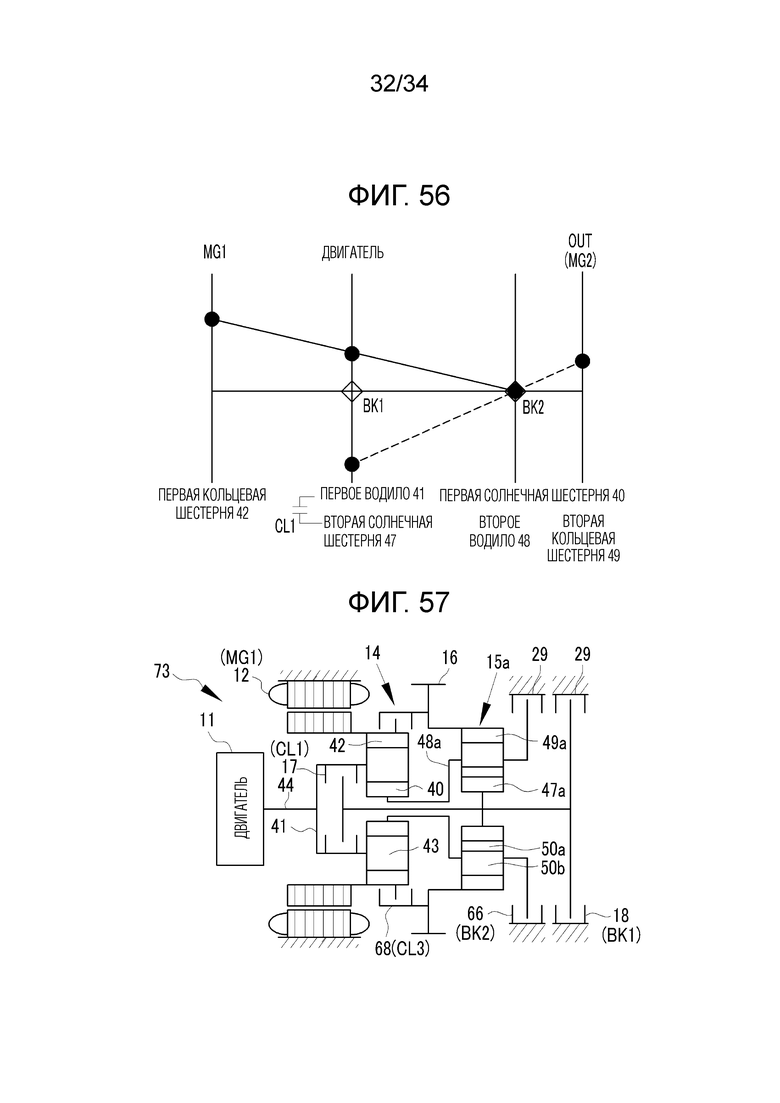
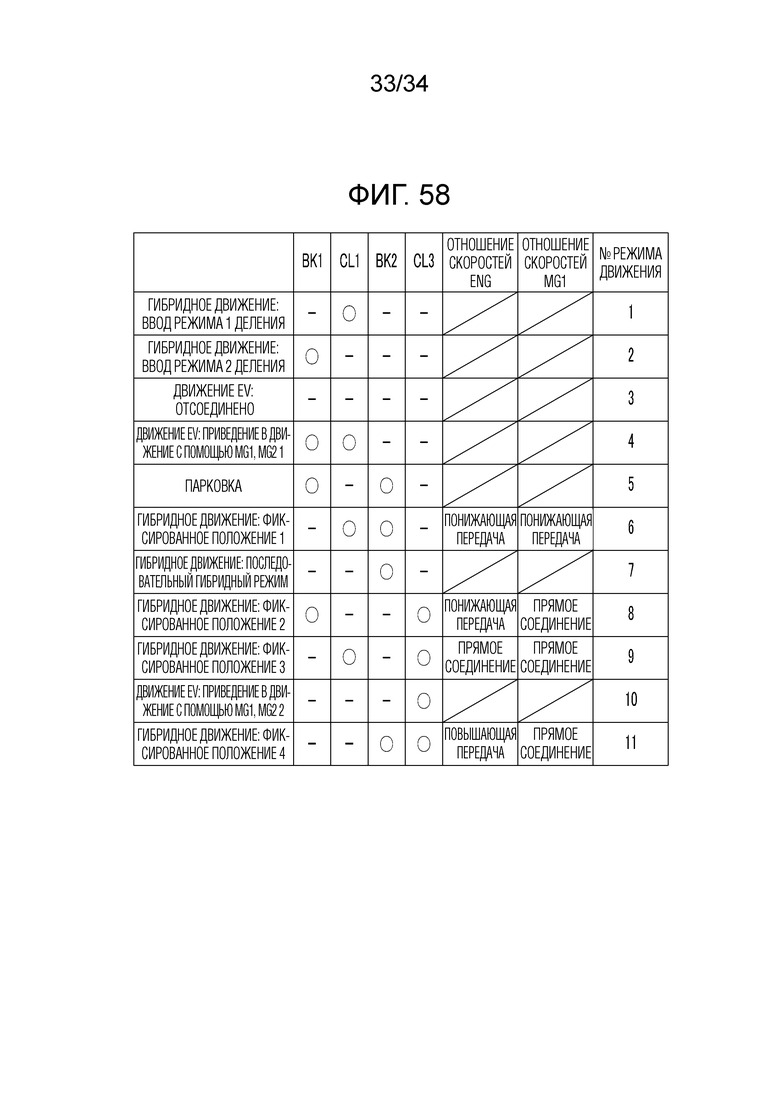
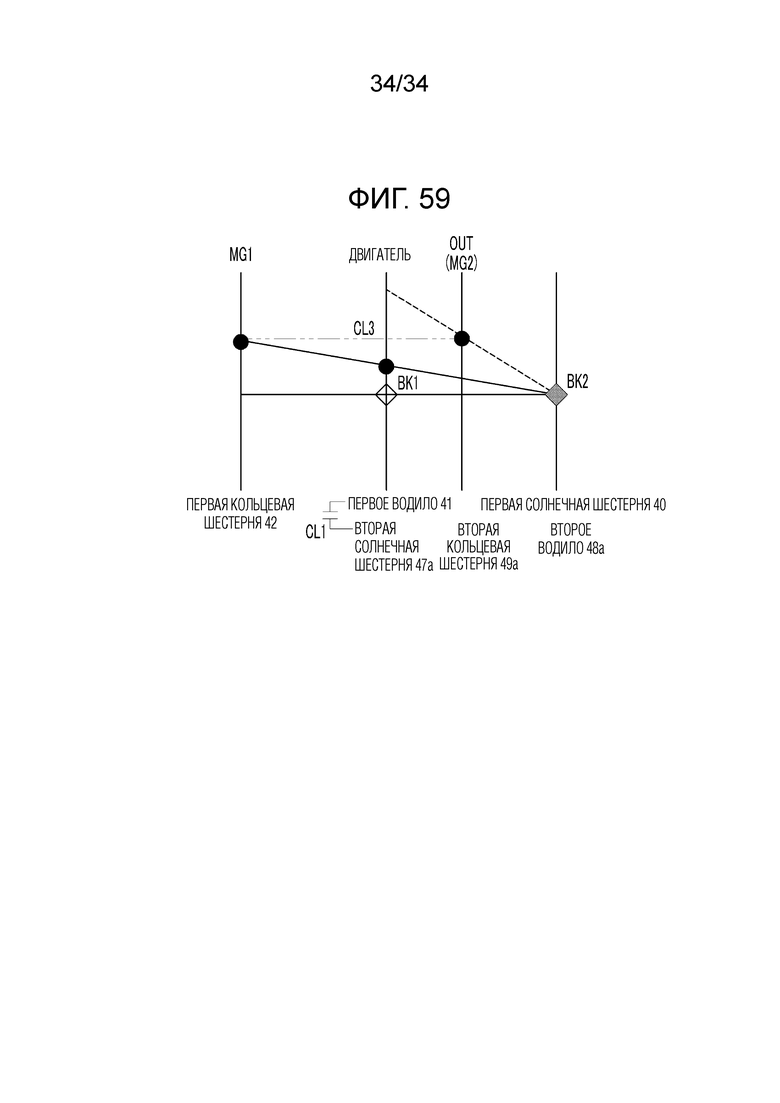
Изобретение относится к гибридным транспортным средствам. Система привода для гибридного транспортного средства содержит двигатель внутреннего сгорания, первый и второй электродвигатели, выходной узел, первый планетарный зубчатый механизм, включающий первый входной и выходной элементы и первый элемент противодействующей силы, и второй планетарный зубчатый механизм, включающий второй входной и выходной элементы и второй элемент противодействующей силы. Также имеется первый механизм сцепления, выборочно соединяющий первый входной элемент со вторым элементом противодействующей силы. Первый тормозной механизм, обеспеченный между вторым элементом противодействующей силы и неподвижным элементом, выборочно предотвращает вращение второго элемента противодействующей силы. Решение направлено на увеличение режимов движения с уменьшенным числом составляющих элементов. 17 з.п. ф-лы, 59 ил.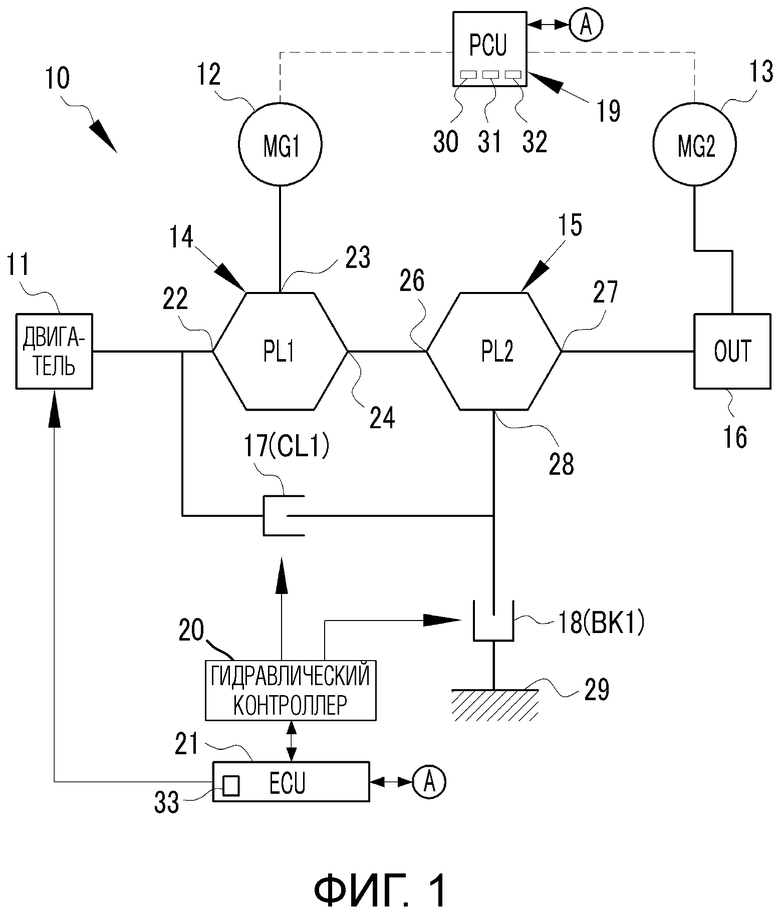
1. Система привода для гибридного транспортного средства, содержащая:
двигатель внутреннего сгорания;
первый электродвигатель, выполненный с возможностью генерирования электрической энергии с использованием мощности, производимой двигателем внутреннего сгорания;
второй электродвигатель, выполненный с возможностью работы с помощью электрической энергии, генерируемой первым электродвигателем, так, чтобы производить движущую силу;
выходной узел, выполненный с возможностью подачи движущей силы для приведения в движение гибридного транспортного средства, к которой добавляется движущая сила, производимая вторым электродвигателем, причем мощность, производимая двигателем внутреннего сгорания, делится на первую часть, направляемую к первому электродвигателю, и вторую часть, направляемую к выходному узлу;
первый планетарный зубчатый механизм, включающий в себя первый входной элемент, первый элемент противодействующей силы и первый выходной элемент, причем первый планетарный зубчатый механизм выполнен с возможностью выполнения работы дифференциала посредством первого входного элемента, первого элемента противодействующей силы и первого выходного элемента, причем первый входной элемент выполнен с возможностью приема движущей силы, производимой двигателем внутреннего сгорания, а первый элемент противодействующей силы соединен с первым электродвигателем;
второй планетарный зубчатый механизм, включающий в себя второй входной элемент, второй выходной элемент и второй элемент противодействующей силы, причем второй планетарный зубчатый механизм выполнен с возможностью выполнения работы дифференциала посредством второго входного элемента, второго выходного элемента и второго элемента противодействующей силы, причем второй входной элемент соединен с первым выходным элементом, а второй выходной элемент соединен с выходным узлом;
первый механизм сцепления, выполненный с возможностью выборочного соединения первого входного элемента со вторым элементом противодействующей силы; и
первый тормозной механизм, обеспеченный между вторым элементом противодействующей силы и неподвижным элементом и выполненный с возможностью выборочно предотвращать вращение второго элемента противодействующей силы.
2. Система привода по п. 1, в которой
первый планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило,
второй планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило,
причем первая кольцевая шестерня расположена концентрично с первой солнечной шестерней,
первое водило выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней,
вторая кольцевая шестерня расположена концентрично со второй солнечной шестерней,
второе водило выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней,
причем первая солнечная шестерня обеспечивает первый выходной элемент,
первое водило обеспечивает первый входной элемент,
первая кольцевая шестерня обеспечивает первый элемент противодействующей силы,
вторая солнечная шестерня обеспечивает второй элемент противодействующей силы,
второе водило обеспечивает второй входной элемент,
вторая кольцевая шестерня обеспечивает второй выходной элемент.
3. Система привода по п. 1, в которой
первый планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с двойными планетарными шестернями, включающий в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило,
второй планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило,
причем первая кольцевая шестерня расположена концентрично с первой солнечной шестерней,
первое водило выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней, и второй планетарной шестерни, которая находится в зацеплении с первой планетарной шестерней и первой кольцевой шестерней,
вторая кольцевая шестерня расположена концентрично со второй солнечной шестерней,
второе водило выполнено с возможностью вращения при удерживании третьей планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней,
причем первая солнечная шестерня обеспечивает первый выходной элемент,
первое водило обеспечивает первый элемент противодействующей силы,
первая кольцевая шестерня обеспечивает первый входной элемент,
вторая солнечная шестерня обеспечивает второй элемент противодействующей силы,
второе водило обеспечивает второй входной элемент и
вторая кольцевая шестерня обеспечивает второй выходной элемент.
4. Система привода по п. 1, в которой
первый планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило,
второй планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с двойными планетарными шестернями, включающий в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило,
причем первая кольцевая шестерня расположена концентрично с первой солнечной шестерней,
первое водило выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней,
вторая кольцевая шестерня расположена концентрично со второй солнечной шестерней,
второе водило выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней, и третьей планетарной шестерни, которая находится в зацеплении со второй планетарной шестерней и второй кольцевой шестерней,
причем первая солнечная шестерня обеспечивает первый выходной элемент,
первое водило обеспечивает первый входной элемент,
первая кольцевая шестерня обеспечивает первый элемент противодействующей силы,
вторая солнечная шестерня обеспечивает второй элемент противодействующей силы и
второе водило обеспечивает второй выходной элемент,
вторая кольцевая шестерня обеспечивает второй входной элемент.
5. Система привода по п. 1, в которой
первый планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с двойными планетарными шестернями, включающий в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило,
второй планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с двойными планетарными шестернями, включающий в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило,
причем первая кольцевая шестерня расположена концентрично с первой солнечной шестерней,
первое водило выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней, и второй планетарной шестерни, которая находится в зацеплении с первой планетарной шестерней и первой кольцевой шестерней,
вторая кольцевая шестерня расположена концентрично со второй солнечной шестерней,
второе водило выполнено с возможностью вращения при удерживании третьей планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней, и четвертой планетарной шестерни, которая находится в зацеплении с третьей планетарной шестерней и второй кольцевой шестерней,
причем первая солнечная шестерня обеспечивает первый выходной элемент,
первое водило обеспечивает первый элемент противодействующей силы,
первая кольцевая шестерня обеспечивает первый входной элемент,
вторая солнечная шестерня обеспечивает второй элемент противодействующей силы,
второе водило обеспечивает второй выходной элемент и
вторая кольцевая шестерня обеспечивает второй входной элемент.
6. Система привода по п. 1, в которой
первый планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило,
второй планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило,
причем первая кольцевая шестерня расположена концентрично с первой солнечной шестерней,
первое водило выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней,
вторая кольцевая шестерня расположена концентрично со второй солнечной шестерней,
второе водило выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней,
причем первая солнечная шестерня обеспечивает первый выходной элемент,
первое водило обеспечивает первый входной элемент,
первая кольцевая шестерня обеспечивает первый элемент противодействующей силы,
второе водило обеспечивает второй входной элемент,
вторая солнечная шестерня обеспечивает второй выходной элемент и
вторая кольцевая шестерня обеспечивает второй элемент противодействующей силы.
7. Система привода по п. 1, в которой
первый планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило,
второй планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило,
причем первая кольцевая шестерня расположена концентрично с первой солнечной шестерней,
первое водило выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней,
вторая кольцевая шестерня расположена концентрично со второй солнечной шестерней,
второе водило выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней,
причем первая солнечная шестерня обеспечивает первый выходной элемент,
первое водило обеспечивает первый входной элемент,
первая кольцевая шестерня обеспечивает первый элемент противодействующей силы,
вторая кольцевая шестерня обеспечивает второй элемент противодействующей силы,
вторая солнечная шестерня обеспечивает второй входной элемент и
второе водило обеспечивает второй выходной элемент.
8. Система привода по п. 1, в которой
первый планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило,
второй планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило,
причем первая кольцевая шестерня расположена концентрично с первой солнечной шестерней,
первое водило выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней,
вторая кольцевая шестерня расположена концентрично со второй солнечной шестерней,
второе водило выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней и второй кольцевой шестерней,
причем первое водило обеспечивает первый выходной элемент,
первая кольцевая шестерня обеспечивает первый входной элемент,
первая солнечная шестерня обеспечивает первый элемент противодействующей силы,
второе водило обеспечивает второй элемент противодействующей силы,
вторая солнечная шестерня обеспечивает второй входной элемент и
вторая кольцевая шестерня обеспечивает второй выходной элемент.
9. Система привода по п. 8, дополнительно содержащая:
контроллер, выполненный с возможностью:
управления двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления и первым тормозным механизмом и
включения первого тормозного механизма и дополнительного вынуждения двигателя внутреннего сгорания и второго электродвигателя производить движущую силу для движения гибридного транспортного средства назад.
10. Система привода по п. 1, в которой
первый планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с одинарными планетарными шестернями, включающий в себя первую солнечную шестерню, первую кольцевую шестерню и первое водило,
второй планетарный зубчатый механизм представляет собой планетарный зубчатый механизм с двойными планетарными шестернями, включающий в себя вторую солнечную шестерню, вторую кольцевую шестерню и второе водило,
причем первая кольцевая шестерня расположена концентрично с первой солнечной шестерней,
первое водило выполнено с возможностью вращения при удерживании первой планетарной шестерни, которая находится в зацеплении с первой солнечной шестерней и первой кольцевой шестерней,
вторая кольцевая шестерня расположена концентрично со второй солнечной шестерней,
второе водило выполнено с возможностью вращения при удерживании второй планетарной шестерни, которая находится в зацеплении со второй солнечной шестерней, и третьей планетарной шестерни, которая находится в зацеплении со второй планетарной шестерней и второй кольцевой шестерней,
причем первая солнечная шестерня обеспечивает первый выходной элемент,
первое водило обеспечивает первый входной элемент,
первая кольцевая шестерня обеспечивает первый элемент противодействующей силы,
вторая солнечная шестерня обеспечивает второй элемент противодействующей силы,
второе водило обеспечивает второй входной элемент и
вторая кольцевая шестерня обеспечивает второй выходной элемент.
11. Система привода по любому из пп. 1-8 и 10, дополнительно содержащая:
второй тормозной механизм, выполненный с возможностью выборочного прикрепления первого выходного элемента к неподвижному элементу.
12. Система привода по п. 11, дополнительно содержащая:
контроллер, выполненный с возможностью:
управления двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления, первым тормозным механизмом и вторым тормозным механизмом и
включения первого тормозного механизма и второго тормозного механизма так, чтобы предотвращать вращение ведущих колес гибридного транспортного средства.
13. Система привода по п. 11, дополнительно содержащая:
третий механизм сцепления, выполненный с возможностью выборочного соединения первого элемента противодействующей силы со вторым выходным элементом.
14. Система привода по п. 13, дополнительно содержащая:
контроллер, выполненный с возможностью:
управления двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления, первым тормозным механизмом, вторым тормозным механизмом и третьим механизмом сцепления и
включения первого тормозного механизма и второго тормозного механизма так, чтобы предотвращать вращение ведущих колес гибридного транспортного средства.
15. Система привода по любому из пп. 1-8 и 10, дополнительно содержащая:
третий механизм сцепления, выполненный с возможностью выборочного соединения первого элемента противодействующей силы со вторым выходным элементом.
16. Система привода по любому из пп. 1-8 и 10, дополнительно содержащая:
контроллер, выполненный с возможностью:
управления двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления и первым тормозным механизмом и
включения первого механизма сцепления и первого тормозного механизма и дополнительной остановки работы двигателя внутреннего сгорания так, чтобы вынудить первый электродвигатель и второй электродвигатель производить движущую силу для движения гибридного транспортного средства вперед.
17. Система привода по любому из пп. 1-8 и 10, дополнительно содержащая:
второй механизм сцепления, выполненный с возможностью выборочного соединения второго выходного элемента со вторым элементом противодействующей силы.
18. Система привода по п. 17, дополнительно содержащая:
контроллер, выполненный с возможностью:
управления двигателем внутреннего сгорания, первым электродвигателем, вторым электродвигателем, первым механизмом сцепления, первым тормозным механизмом и вторым механизмом сцепления и
включения первого тормозного механизма и второго механизма сцепления так, чтобы предотвращать вращение ведущих колес гибридного транспортного средства.
| Устройство для гашения пульсаций давления в подводном трубопроводе | 1990 |
|
SU1707416A1 |
| US 2010273595 A1, 28.10.2010 | |||
| US 2012322602 A1, 20.12.2012 | |||
| US 2012316021 A1, 13.12.2012 | |||
| US 2015258978 A1, 17.09.2015 | |||
| US 2015021110 A1, 22.01.2015. | |||

