Изобретение относится к авиационной технике и может быть использовано при разработке систем сигнализации о пилотажных параметрах вертолета.
Наиболее близким аналогом заявляемого устройства по назначению является система контроля оборотов несущего винта (НВ) вертолета Ми-171 («Вертолет Ми-171. Руководство по летной эксплуатации», Воениздат, кн.1, 8.23.1/2; 84.62.00, 1985 г.), использующая блок сигнализации граничных оборотов (БСГО-400).
Система содержит датчик оборотов НВ, блок сигнализации граничных оборотов с двумя одновибраторами (генераторами импульсов), а также светосигнальное табло «Обороты НВ низкие» и светосигнальное табло «Обороты НВ высокие».
Входной сигнал от датчика оборотов НВ, частота которого пропорциональна оборотам несущего винта, сравнивается по длительности с эталонными сигналами двух последовательно соединенных одновибраторов (генераторов импульсов).
Если длительность периода входного сигнала меньше длительности импульса первого одновибратора или больше длительности импульса второго одновибратора, то на одном из двух выходов блока сигнализации граничных оборотов появляется соответственно сигнал о повышении или понижении оборотов НВ.
Однако наличие на вертолете системы контроля оборотов несущего винта с подобной сигнализацией о пилотажных параметрах вертолета оказывается недостаточным вследствие недостаточной точности поддержания заданных предельных оборотов (±2%).
Это может препятствовать выработке правильной оценки полетной ситуации пилотом и принятия им своевременных решений при эксплуатации вертолета, что особенно важно при выполнении заходов на посадку и при посадке.
Задачей заявляемого изобретения является создание системы контроля оборотов несущего винта вертолета, которая обеспечит большую точность поддержания оборотов несущего винта и улучшит благодаря этому адаптацию пилота к летной обстановке, обеспечит выработку необходимого «стереотипа» оценки им полетной ситуации.
Поставленная задача решена благодаря тому, что в системе контроля оборотов несущего винта вертолета, содержащей датчик оборотов несущего винта, индикатор оборотов несущего винта и блок сигнализации граничных оборотов несущего винта, включающий средства сравнения текущего значения оборотов с заданными максимальным и минимальным значениями, связанные с системой световой сигнализации, в соответствии с изобретением блок сигнализации граничных оборотов несущего винта выполнен в виде схемы нормализации текущего значения сигналов датчика оборотов и вычислителя со средствами сравнения текущего значения оборотов с заданными максимальным и минимальным значениями, который снабжен дополнительно средством определения градиента оборотов несущего винта и сравнения его с заданной предельной величиной, соответствующий выход которого связан с речевым информатором.
При этом средства сравнения текущего значения оборотов несущего винта с заданными максимальным и минимальными значениями настроены соответственно на предельные значения оборотов более 98% и менее 92% от номинального значения, а средства сравнения градиента оборотов - на предельное значение 2% в секунду в рабочем диапазоне оборотов несущего винта от 92% до 98%.
Вычислитель снабжен стандартными средствами (функциональными блоками, схемами для обработки информации и вычислений с заданным алгоритмом, с заданной программой), предназначенными для сравнения текущего значения оборотов несущего винта с заданными опорными значениями, а также функциональными блоками для определения градиента изменения значения оборотов и сравнения его с заданным опорным значением.
Система предусматривает нормализацию сигналов, полученных от датчика оборотов несущего винта, с последующим сравнением их текущего значения (в цифровой форме, в процентах от номинального) с заданными максимальным и минимальным пороговыми значениями (в соответствующих функциональных блоках вычислителя; с помощью программы ЭВМ). Выходы с вычислителя через первую и вторую ключевые схемы (электронные ключи) связаны с соответствующими световыми сигнализаторами: светосигнальными табло «Обороты малы» (при значениях менее 92% от номинального) или «Обороты высоки» (при значениях более 98%), а другой выход вычислителя через третью ключевую схему подан на речевой информатор: «Обороты падают» (при значениях градиента более 2% в секунду).
Использование в предлагаемой системе контроля оборотов несущего винта вертолета, в его блоке сигнализации граничных оборотов, вычислителя с системой функциональных блоков для анализа текущего значения оборотов и функциональных блоков для вычисления и анализа градиента оборотов позволяет повысить на порядок точность работы системы (точность измерений ±0,2%) в сравнении с устройством-аналогом БСГО-400 (точность ±2%).
Система обеспечивает более точное поддержание оборотов несущего винта и таким образом более точную оценку полетной ситуации для принятия пилотом адекватных решений. Благодаря возможности контроля не только оборотов несущего винта, но и градиента падения оборотов устройство позволяет повысить точность сигнализации о пилотажных параметрах вертолета и в результате повысить эксплуатационную надежность вертолета на предельно допустимых режимах полета. Система особенно эффективна, в частности, для приобретения летных навыков при обучении курсантов летных училищ. Элементы систем световой и речевой индикации установлены на приборных досках в кабине экипажа. Выходные сигналы первой и второй ключевой схем могут быть подключены к светосигнальным табло «Обороты винта высоки» и «Обороты винта малы», или оба сигнала могут быть объединены в одно световое табло «Обороты НВ». Одновременно можно выполнить и речевые сообщения «Обороты винта высоки» и «Обороты винта малы». Сигнал от третьей ключевой схемы подключен к речевому информатору «Обороты падают» и может быть также подключен не только к звуковому (речевому) информатору, но также и к световому табло «Обороты падают». Все световые сигнализаторы выполнены мигающими.
Выходы функциональных блоков вычислителя, предназначенных для сравнения текущего значения оборотов с заданными максимальным и минимальным значениями, и выход функционального блока, предназначенного для сравнения текущего значения градиента с заданной предельной величиной, связаны с постоянным запоминающим устройством и через цифроаналоговый преобразователь - с аварийным регистратором параметров полета.
Заявляемое устройство изображено на фиг.1, представляющем функциональную схему системы контроля оборотов несущего винта вертолета.
Система содержит датчик оборотов несущего винта 1, индикатор оборотов 2, блок питания 3, световые сигнализаторы 4, речевой индикатор 5, блок 6 сигнализации граничных оборотов несущего винта.
Блок сигнализации граничных оборотов несущего винта 6 включает блок нормализации сигналов 7 и вычислитель 8 (например, однокристальную микроЭВМ).
Вычислитель выполнен со стандартными средствами (функциональными блоками, схемами, программами) для сравнения текущего значения оборотов несущего винта с заданными опорными значениями, а также с функциональным блоком для определения градиента оборотов несущего винта и блоком для сравнения текущего значения градиента оборотов с заданным опорным значением.
Блок сигнализации граничных оборотов 6 содержит также три электронных ключа 9, 10 и 11, связанные своими управляющими входами с соответствующими выходами упомянутых функциональных блоков сравнения вычислителя 8. Выходы электронных ключей 9 и 10 соединены со светосигнальными табло «Обороты малы» и «Обороты высоки» системы световой сигнализации или с объединенным табло «Обороты НВ». Выход ключа 11 подсоединен к речевому информатору «Обороты падают» системы речевой сигнализации вертолета, но может быть подключен дополнительно и к световому табло «Обороты падают», введенному в систему световой сигнализации (не показано).
Выход датчика оборотов несущего винта 1 соединен с индикатором оборотов несущего винта 2 и с входом схемы нормализации сигналов 7, выход которой соединен с входом вычислителя 8.
Блок питания 3 соединен со схемой нормализации сигналов 7 и с вычислителем 8. Вычислитель связан с постоянным запоминающим устройством 12 и через цифроаналоговый преобразователь 13 соединен двумя входами блока регистрации параметров полета 14. Один вход блока 14 предназначен для регистрации оборотов несущего винта, и второй вход - для регистрации градиента оборотов.
Система контроля оборотов несущего винта вертолета работает следующим образом.
Система контроля оборотов вступает в работу только после отрыва колес шасси от земли, для чего в цепи блока питания 3 установлен релейный элемент, замыкающий цепь при обжатии шасси.
Сигнал оборотов несущего винта вертолета от датчика 1 преобразуют в схеме нормализации сигналов 7 в цифровую форму, выражающую текущее значение частоты вращения НВ (в % от номинального). В вычислителе 8 с помощью соответствующего стандартного функционального блока сравнения (схемы сравнения) сравнивают текущее значение нормализованного сигнала частоты вращения НВ с заданными опорными максимальным и минимальным его значениями. При превышении текущим значением оборотов (частоты вращения) НВ заданного максимального опорного сигнала формируют сигнал на управляющий вход первого электронного ключа 9, соединенного своим выходом со световым табло «Обороты высоки», а при текущем значении оборотов несущего винта вертолета, меньшем заданного минимального опорного сигнала, формируют управляющий сигнал на второй электронный ключ 10, соединенный своим выходом со световым табло «Обороты малы».
Функциональный блок вычислителя 8, предназначенный для вычисления градиента оборотов, определяет скорость изменения оборотов НВ, а блок сравнения вычислителя 8 сравнивает его с заданным опорным сигналом, соответствующим его максимальному значению. При превышении градиентом заданного порогового значения на выходе блока сравнения формируется сигнал на управляющий вход третьего электронного ключа 11, выход которого соединен с речевым информатором «Обороты падают».
Условия срабатывания светосигнальных табло о нарушении разрешенного эксплуатационного диапазона оборотов НВ от 92% до 98% и о темпе падения оборотов НВ более 2% в секунду установлены из условия недопущения критического состояния несущей системы вертолета.
Выходные сигналы об оборотах несущего винта и градиенте оборотов через цифроаналоговый преобразователь 13 подаются на соответствующие входы блока аварийной регистрации параметров полета 14.
При падении оборотов несущего винта ниже заданного значения (88 - 92%) направляется сигнал на световое табло «Обороты малы», при превышении заданного максимального значения градиента оборотов более 2% в секунду формируется сигнал звукового оповещения летчика речевым информатором «Обороты падают».
Таким образом, заявляемая система дополнительно информирует летчика об изменении угловой скорости вращения НВ ниже значений, указанных в Руководстве по летной эксплуатации. Наличие контроля оборотов НВ с повышенной точностью обеспечит летчику безопасное пилотирование вертолета в сложных метеоусловиях, а также при заходах на посадку и непосредственно при посадке. Устройство обеспечивает повышенную безопасность полетов на режимах максимальной мощности, т.е. при разного рода монтажно-строительных работах, а также на переходных режимах.
Особенную пользу такое устройство будет оказывать при отработке летных навыков у курсантов летных училищ и при отсутствии большой летной практики или для поддержания таковой после длительных перерывов.
Предлагаемое устройство прошло опытную проверку и показало работоспособность и эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И СИГНАЛИЗАЦИИ О ПРИБЛИЖЕНИИ НЕСУЩЕГО ВИНТА К ЗОНЕ РЕЖИМОВ "ВИХРЕВОГО КОЛЬЦА" НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2486596C1 |
| Комплекс бортового радиоэлектронного оборудования вертолета | 2021 |
|
RU2771577C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ВЕРТОЛЕТА | 2013 |
|
RU2543111C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ В ПОЛЕТЕ ИЗГИБНЫХ НАПРЯЖЕНИЙ НА ВАЛУ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА С ТОРСИОННОЙ ВТУЛКОЙ НЕСУЩЕГО ВИНТА | 2016 |
|
RU2631557C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ (варианты) | 2021 |
|
RU2768998C1 |
| СПОСОБ УМЕНЬШЕНИЯ УГЛА АТАКИ НЕСУЩЕГО ВИНТА НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА (ВАРИАНТЫ) | 2014 |
|
RU2539621C1 |
Изобретение относится к авиационной технике и может быть использовано в системах сигнализации о пилотажных параметрах вертолета. Система контроля оборотов несущего винта вертолета содержит датчик оборотов несущего винта (1), индикатор оборотов несущего винта (2), блок сигнализации граничных оборотов несущего винта (6). Блок сигнализации граничных оборотов несущего винта выполнен в виде схемы нормализации (7) текущего значения сигналов датчика оборотов, вычислителя (8) и трех электронных ключей (9, 10, 11). Вычислитель содержит стандартные средства для сравнения текущего значения оборотов несущего винта с заданными максимальным и минимальным значениями (соответственно: 98% и 92% номинального значения) и для определения градиента оборотов несущего винта и сравнения его с заданной предельной величиной (не более 2% в секунду). Три электронных ключа (9, 10 и 11) блока сигнализации граничных оборотов (6) соединены своими управляющими входами с соответствующими выходами упомянутых функциональных блоков сравнения вычислителя (8). Выходы электронных ключей (9 и 10) соединены с табло «Обороты малы» и «Обороты высоки» системы световой сигнализации (4), а выход ключа (11) подсоединен к речевому информатору «Обороты падают». Обеспечивается более точная оценка полетной ситуации. Повышается эксплуатационная надежность вертолета на предельно допустимых режимах полета. 1 з.п. ф-лы, 1 ил.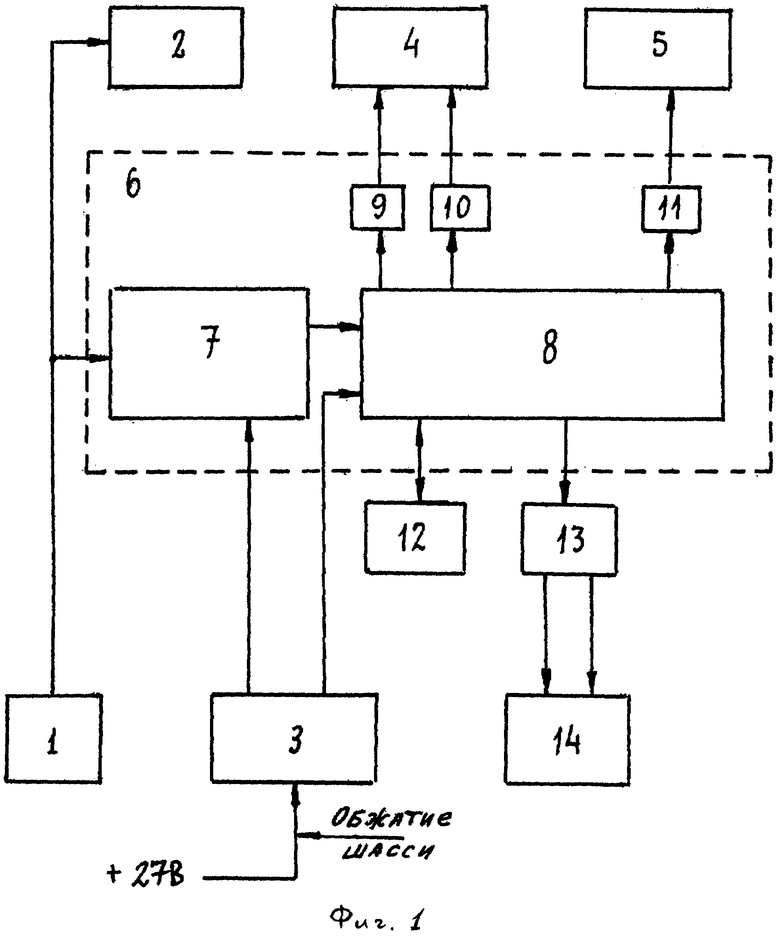
1. Система контроля оборотов несущего винта вертолета, содержащая датчик оборотов несущего винта, индикатор оборотов несущего винта и блок сигнализации граничных оборотов несущего винта, включающий средства сравнения текущего значения оборотов с заданными максимальным и минимальным значениями, связанные с системой световой сигнализации, отличающаяся тем, что блок сигнализации граничных оборотов несущего винта выполнен в виде схемы нормализации текущего значения сигналов датчика оборотов и вычислителя со средствами сравнения текущего значения оборотов с заданными максимальным и минимальным значениями, который снабжен дополнительно средством определения градиента оборотов несущего винта и сравнения его с заданной предельной величиной, соответствующий выход которого связан с речевым информатором.
2. Система по п.1, отличающаяся тем, что средства сравнения текущего значения оборотов несущего винта с заданными максимальным и минимальными значениями настроены соответственно на граничные значения оборотов более 98% и менее 92% от номинального значения, а средство сравнения градиента оборотов - на предельное значение 2% в секунду в рабочем диапазоне оборотов несущего винта от 92% до 98%.
| SU 1267725 А1, 27.05.1999 | |||
| СПОСОБ ПОДДЕРЖАНИЯ ЧИСЛА ОБОРОТОВ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА В ДОПУСТИМЫХ ПРЕДЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231479C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ РЕГУЛИРОВКИ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 1995 |
|
RU2142567C1 |
| US 6012676 A, 11.01.2000 | |||
| US 4466526 A, 21.08.1984. | |||

