Изобретение относится к авиации, а именно к области аэродинамики несущего винта (НВ) одновинтового вертолета, в частности к способу определения и сигнализации о приближении несущего винта к зоне режимов «вихревого кольца» на предпосадочных маневрах.
Уровень техники
Известно, что на предпосадочных маневрах вертолета происходит попадание вертолета в «вихревое кольцо» с неожиданной и резкой потерей высоты полета, что приводит к авариям и катастрофам вертолетной техники за счет неизбежных грубых посадок. Джексон У. Теория вертолета. - М.: Мир, 1989 г., стр.108.
Известна система контроля для предотвращения от вхождения в «вихревое кольцо» винтокрылого аппарата, которая сравнивает воздушную скорость набегающего потока и текущую скорости снижения вертолета на выбранном режиме полета, генерирует сигналы в ответ на вхождение в режим полета «вихревое кольцо» и формирует вибрирующий цикл для сдерживания роторного диска от вхождения в «вихревое кольцо», патент № SU 2006/0006279 А1, 2006 г. Однако этот маневр может повлиять на траекторию полета.
Известен способ обнаружения и сигнализации о приближении к «вихревому кольцу» винтокрылого аппарата, содержащий измерение на предварительных летных испытаниях с помощью системы измерителей скорости воздушного потока при значительных погрешностях и связанных с ней тангенциальных и нормальных составляющих воздушной скорости потока вблизи несущего винта, формирование по этим парным величинам на осях абсцисс и ординат диаграммы границ возникновения зоны режимов «вихревого кольца» винтокрылого аппарата, сравнение в течение полета воздушной скорости вертолета и связанной с ней вертикальной скорости с граничными параметрами зоны «вихревого кольца» по диаграмме и при соответствии параметров режиму «вихревого кольца» формирование сигнала предупреждения. Приемники воздушного давления (ПВД) установлены напротив на двух плечах вращающего рычага, установленного на штанге над несущим винтом винтокрылого аппарата (патент № US 7907066 В2, 2011, WO 2009074745 A1).
Однако в известном способе тангенциальную и нормальную (осевую) скорости набегающего потока воздуха вблизи НВ определяют без учета их зависимости от угла атаки НВ, рассчитываемого по углу тангажа, углу отклонения автомата перекоса в продольном направлении, отношения вертикальной скорости вертолета к горизонтальной скорости воздушного потока вблизи НВ, что значительно снижает точность при определении зоны режимов «вихревого кольца» и момента запуска сигнала тревоги, увеличивая вероятность летных происшествий. Кроме того, усложнение конструкции НВ снижает надежность и влияет на траекторию полета при предпосадочных маневрах.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в повышении безопасности полетов вертолета на предпосадочных маневрах.
Для получения указанного технического результата в способе определения и сигнализации о приближении несущего винта (НВ) к зоне режимов «вихревого кольца» на предпосадочных маневрах одновинтового вертолета, включающем измерение при предварительных летных испытаниях с помощью системы измерений поступательной скорости с учетом ветра и вертикальной скорости вертолета на режимах снижения на Нср=1000 м, и по этим парным величинам на осях абсцисс и ординат строят диаграммы границ возникновения «вихревого кольца» вертолета (фиг.4), сравнение в течение предпосадочного маневра скорости воздушного потока и связанной с ней вертикальной скорости с граничными параметрами зоны режима «вихревого кольца», определение и сигнализацию о приближении к режиму «вихревого кольца» и формирование сигнала предупреждения, при этом воздушную скорость набегающего потока вблизи несущего винта измеряют с помощью приемника воздушного давления (ПВД), установленного в законцовке лопасти. На предпосадочных маневрах вертолета измеряют вертикальную скорость вертолета, угол тангажа вертолета, угол отклонения автомата перекоса в продольном направлении и вычисляют угол атаки НВ, тангенциальную и нормальную составляющие воздушной скорости набегающего потока в текущем времени по следующим формулам:

где α - угол атаки НВ, в градусах;
ϑ - угол тангажа вертолета, в градусах;
φзакл - угол заклинения (наклона вперед) оси вращения НВ, в градусах;
δв - угол отклонения автомата перекоса в продольном направлении, в градусах;
D1 - передаточное отношение от автомата перекоса до равнодействующей тяги НВ;
Vy - вертикальная скорость вертолета, в м/с;
Vx - горизонтальная скорость воздушного потока вблизи НВ, в км/ч;
определяют суммарную тангенциальную скорость в плоскости концов лопастей:

и суммарную нормальную (осевую) скорости:

Тангенциальную скорость набегающего потока вблизи несущего винта при ее уменьшении (фиг.1 и 2) за счет воздействия встречных индуктивных скоростей, создаваемых вихревым следом НВ, и осевую (нормальную) скорость сравнивают с граничными параметрами зоны «вихревого кольца». При снижении вертолета со скоростью более 3 м/с и полете со скоростью менее 45-50 км/ч летчику начинают сигнализировать о приближении к зоне «вихревого кольца» прерывистыми световыми и речевыми сигналами (фиг.3), а также в систему автоматического управления (САУ) передают команду об уменьшении угла тангажа до посадочного значения, исключающего касание предохранительной пятой подстилающей поверхности, и одновременно стабилизируют вертикальную скорость снижения вертолета до значения не более 2,0 м/с. Кроме того, при попадании в режим «вихревое кольцо» тревожные сигналы усиливаются (фиг.4), что требует от летчика немедленного увеличения скорости полета и при наличии запаса мощности двигателя пытаться после разгона до Vx=40 км/ч уменьшить вертикальную скорость.
Таким образом, технический результат достигается за счет уточнения границ возникновения «вихревого кольца» путем учета в расчетах суммарной тангенциальной скорости в плоскости концов лопастей и суммарной осевой скорости воздушного потока в зависимости от угла атаки НВ, рассчитываемым исходя из суммы параметров (ϑ+φзакл.+D1δв+arctg 3,6×Vy/Vx).
Предлагаемый способ поясняется на фиг.1-4.
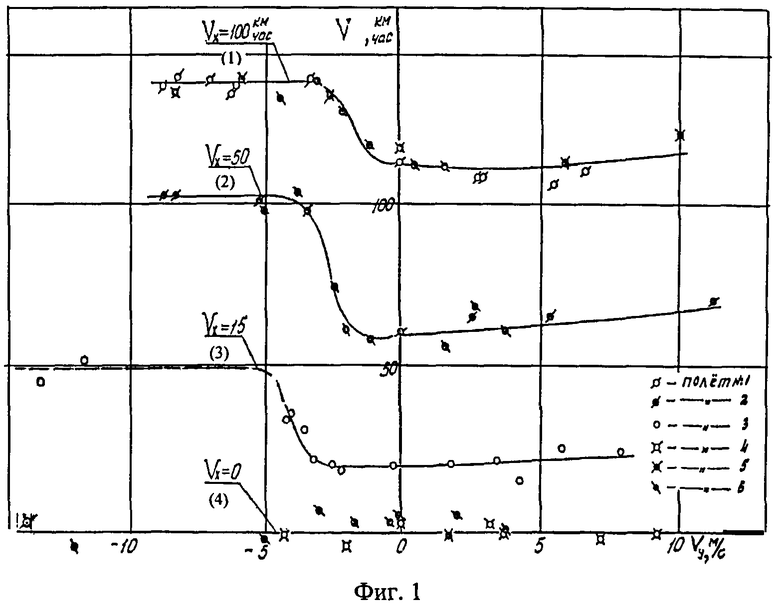
На фиг.1 приведены тарировочные характеристики индикатора поступательной малой скорости вертолета - Vx на режимах набора высоты и снижения вертолета Ми-8 на средней высоте 1000 м, где (1) - зависимость поступательной скорости полета вертолета от скорости снижения Vy при выдерживании по индикатору Vx=100 км/ч, (2) - зависимость поступательной скорости вертолета от вертикальной скорости - Vy при Vx=50 км/ч, (3) - зависимость поступательной скорости вертолета от Vy при Vx=15 км/ч, (4) - зависимость поступательной скорости вертолета от Vy при Vx=0.
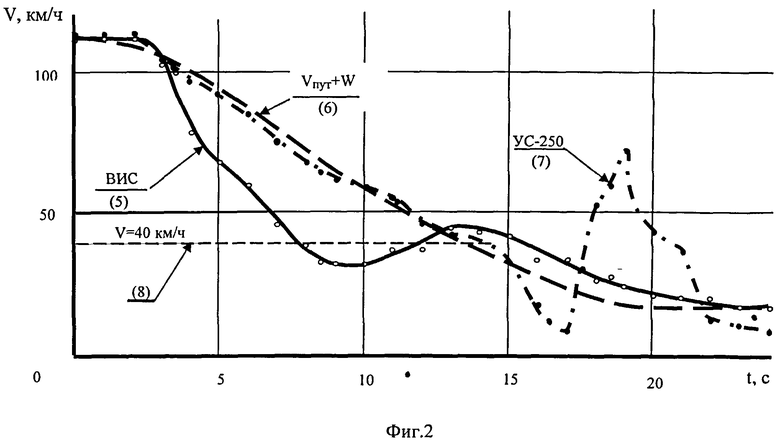
На фиг.2 представлены зависимости воздушной скорости вблизи несущего винта, около штатного ПВД и истиной по замерам путевой скорости по данным кинотеодолитных станций (КТС) с учетом скорости ветра W, равного 4 м/с, на режиме горизонтального торможения вертолета Ми-8, на высоте 20 м:
5 - зависимость воздушной скорости вблизи НВ Vx от времени по показаниям индикатора вертолетного измерителя скорости (ВИС), работающего от ПВД на лопасти НВ -;
6 - зависимость скорости от времени по данным КТС с учетом скорости ветра W;
7 - зависимость скорости от времени по показаниям индикатора указателя скорости УС-250, работающего от ПВД на фюзеляже вертолета;
8 - граница зоны «вихревого кольца» по поступательной скорости вертолета.
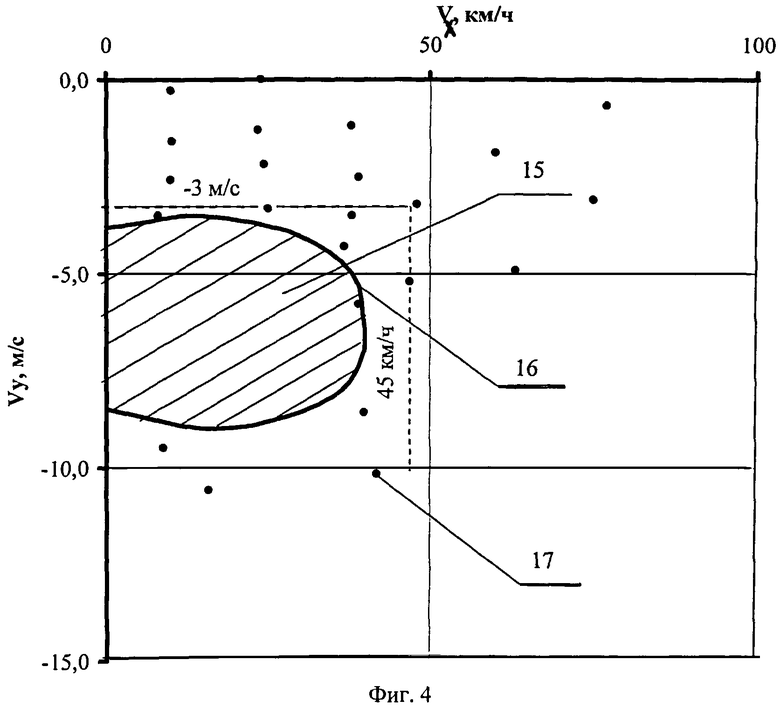
На фиг.3 приведена блок-схема устройства предупреждения летчика о приближении и попадании в зону«вихревого кольца», содержащая блок обработки фактических измерений и расчета текущих значений Vт и Voc (9), связанный входами с выходами измерителей вертикальной скорости вертолета, горизонтальной скорости воздушного потока вблизи НВ, угла тангажа вертолета, угла отклонения автомата перекоса в продольном направлении; блок базы данных (10), представляющих посредством диаграммы в системе осей, связанных с НВ, граничные параметры зоны режима «вихревого кольца», а оси абсцисс и ординат которой соответствуют тангенциальной и нормальной составляющим воздушной скорости вблизи НВ, при этом выход (10) и выход блока обработки фактических измерений (9) соединены с входами блока сравнения (11) текущих значений Vт и Voc с граничными параметрами для обнаружения пары составляющих тангенциальной и осевой скоростей, приближающих НВ к зоне режима «вихревого кольца» в текущем времени полета и формирования сигнала, выход которого связан с входом блока предупреждения летчика о приближении к зоне «вихревого кольца» со световым (12) и с речевым сигналом (13) и САУ (14).
На фиг.4 приведены границы (16) зоны режимов «вихревого кольца» (15) для одновинтового вертолета и показаны режимы без проявления признаков « вихревого кольца» (17)
Способ осуществляется следующим образом.
При предварительных летных испытаниях на режимах снижения вертолета на средней высоте 1000 м с помощью внешнетраекторных измерений фиксируют путевую скорость вертолета и с учетом скорости ветра определяют его воздушную скорость и вертикальную скорость. По этим парным величинам с учетом критерия увеличения скорости снижения вертолета из-за повышения потребной мощности двигателей строят диаграммы границ возникновения «вихревого кольца» (фиг.4) и заносят в блок 10 на фиг.3.
На предпосадочных маневрах с помощью ПВД, установленного в законцовке лопасти одновинтового вертолета, соединенного с измерителем малой скорости, измеряют воздушную скорость набегающего потока вблизи несущего винта. Кроме того, измеряют вертикальную скорость вертолета, угол тангажа вертолета, угол отклонения автомата перекоса в продольном направлении для расчета угла атаки НВ. В текущем времени вычисляют угол атаки НВ, тангенциальную и нормальную составляющие воздушной скорости набегающего потока в вычислителе блока, (9) блока 9 на фиг.3 устройства предупреждения летчика о приближении и попадании в зону «вихревого кольца» по следующим формулам:

α - угол атаки НВ, в градусах;
ϑ - угол тангажа вертолета, в градусах;
φзакл - угол заклинения (наклона вперед) оси вращения НВ, в градусах;
δв - угол отклонения автомата перекоса в продольном направлении, в градусах;
D1 - передаточное отношение от автомата перекоса до равнодействующей тяги НВ;
Vy - вертикальная скорость вертолета, в м/с;
Vx - горизонтальная скорость воздушного потока вблизи НВ, в км/ч;
определяют суммарную тангенциальную скорость в плоскости концов лопастей:

и суммарную нормальную (осевую) скорости:

На втором этапе в реальном времени полета вертолета, см фиг.3, выходы блока (9) и блока (10) соединяют с входами блока сравнения (11), в котором тангенциальную скорость набегающего потока вблизи несущего винта при ее уменьшении за счет воздействия встречных индуктивных скоростей, создаваемых вихревым следом, и осевую (нормальную) скорость сравнивают с граничными параметрами зоны режима «вихревого кольца». По результатам сравнения в блоке (11) определяется предсказываемая воздушная скорость при обнаружении пары тангенциальной и осевой скоростей в пределах зоны режимов «вихревого кольца», и по сигналу из блока (11), поступающего на входы блоков (12 и 13), формируют световые и речевые сигналы предупреждения.
Кроме того, по результатам экспериментов был также определен диапазон скоростей с неустойчивым режимом обтекания винта: наблюдался неустойчивый режим обтекания винта при уменьшении воздушной скорости вблизи НВ до Vx≤45-50 км/ч и скорости снижения и Vy≥3-2 м/с и режим при Vx≥45 км/ч и Vy≤3-2 м/с, когда неустойчивость отсутствует. При снижении вертолета со скоростью более 3 м/с и воздушной скоростью вблизи винта, измеренной вертолетным измерителем скорости (ВИС), менее 45-50 км/ч летчику начинают сигнализировать о приближении к зоне «вихревого кольца» световыми и речевыми сигналами, а также в систему автоматического управления передают команду об уменьшении угла тангажа до посадочного значения, исключающего касание предохранительной пятой подстилающей поверхности, и одновременно стабилизируют вертикальную скорость снижения вертолета до значения не более 2,0 м/с.
При попадании в режим «вихревое кольцо» тревожные сигналы усиливаются, что требует от летчика немедленного увеличения скорости полета и при наличии запаса мощности двигателя пытаться после разгона до Vx≥40 км/ч уменьшить вертикальную скорость.
Пример
На этапе эксперимента прогнозируют приближение несущего винта (НВ) к зоне режимов «вихревого кольца» на предпосадочных маневрах одновинтового вертолета Ми-8 путем измерения во времени вертикальной скорости снижения вертолета Vy и воздушных скоростей Vx вблизи лопасти с помощью ПВД, установленного в ее законцовке, соединенной с измерителем малой скорости. Кроме того, вычисляют угол атаки α винта для соответствующих сочетаний скоростей Vx и Vy. На основании этих данных определяют суммарные тангенциальные и нормальные составляющие величин скорости вблизи несущего винта по формулам (1), (2), (3) в блоке (9) на фиг.3. В предварительных летных испытаниях одновинтового вертолета по известным критериям: увеличение скорости снижения вертолета из-за повышения потребной мощности, увеличения пульсации тяги НВ, путем визуализации спутного вихревого следа или определения снижения эффективности управления вертолетом с замерами траекторных параметров вертолета на режимах и фиксации скорости ветра определяется зона режимов «вихревого кольца», фиг.4, которая используется для идентификации режимов работы НВ при приближении к зоне в текущем времени реального полета на предпосадочных маневрах.
Для оценочного расчета положения НВ вертолета Ми-8 относительно зоны режимов «вихревого кольца» принимают фиксированный момент времени захода на посадку, соответствующий скорости полета вертолета 60 км/ч. По инструкции вертикальная скорость снижения при заходе на посадку не должна превышать 2 м/с. На этом режиме полета вертолета происходит совместное влияние на уменьшение местной скорости вблизи НВ от снижения, фиг.1, и торможения, фиг.2, что соответствует скорости снижения -4 м/с на фиг.1. Так, на скорости снижения Vy=-4 м/с указатель малой скорости вблизи НВ показал на уменьшение горизонтальной составляющей скорости воздушного потока вблизи НВ на 43 км/ч, то есть с 60 км/ч понизилась до 17 км/ч = 4,7 м/с, что может соответствовать совместному воздействию снижения и торможения в реальном предпосадочном маневре.
Определяют угол атаки α=arctgVy/Vx=arctg(-2)/4,7=23030i. Затем определяют суммарные тангенциальные Vт и осевую Voc скорости по формулам (2) и (3):
Vт=5,1 м/с=18,36 км/ч и Voc=-3,72 м/с.
Такое парное сочетание тангенциальной Vт и осевой Voc скоростей соответствует попаданию в зону режимов «вихревого кольца», см. фиг.4.
Важно, что происходит вблизи НВ на предпосадочном маневре при воздушной скорости 80 км/ч. Как и при 60 км/ч, фиг.1, произошло занижение скорости воздушного потока вблизи НВ на величину, близкую 43 км/ч. Поэтому горизонтальная скорость в плоскости концов лопастей будет равна 37 км/ч=10,3 м/с. Определяют угол атаки α=arctg(-2)/10,3=11°. Затем определяют суммарные тангенциальные Vт и осевую Voc скорости по формулам (2) и (3):
Vт=10,49 м/с=37,72 км/ч и Voc=-3.93 м/с.
При скорости вертолета 80 км/ч НВ также находится вблизи зоны режимов «вихревое кольцо» и незначительное увеличение скорости снижения вертолета или увеличение его тангажа приведет к попаданию в зону режимов « вихревое кольцо».
Так как летчик даже не подозревает о близости зоны режимов «вихревое кольцо», он получает голосовое и световое предупреждение.
По результатам экспериментов был также определен критерий, по которому оценивают неустойчивый режим обтекания винта: наблюдался неустойчивый режим обтекания винта при значительном уменьшении воздушной скорости вблизи НВ:
Vx≤45 км/ч и Vy≥3-2 м/с и режим, когда Vx≥45 км/ч и Vy≤3-2 м/с, неустойчивость отсутствует.
На этапе полета используют устройство предупреждения о приближении к зоне режимов «вихревого кольца», выдающее световые и звуковые сигналы, блок-схема которого приведена на фиг.3. Кроме того, сигнал поступает в САУ, с помощью которого уменьшают тангаж вертолета до посадочного значения и стабилизируют скорость снижения вертолета до значения не более 2 м/с.
Таким образом, получение дополнительной информации в летных испытаниях при положительных углах атаки о значительном уменьшение скорости воздушного потока вблизи НВ позволит значительно усовершенствовать известные способы предупреждения летчика о попадании в зону «вихревого кольца» применительно к предпосадочным маневрам вертолетной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УМЕНЬШЕНИЯ УГЛА АТАКИ НЕСУЩЕГО ВИНТА НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА (ВАРИАНТЫ) | 2014 |
|
RU2539621C1 |
| СПОСОБ ОЦЕНКИ ГОРИЗОНТАЛЬНЫХ СОСТАВЛЯЮЩИХ ИНДУКТИВНЫХ СКОРОСТЕЙ НА МАЛЫХ СКОРОСТЯХ ПОЛЁТА ОДНОВИНТОВОГО ВЕРТОЛЁТА | 2012 |
|
RU2495794C1 |
| Способ предотвращения попадания винтокрылого летательного аппарата в зону режима "вихревого кольца" на предпосадочных маневрах в режиме висения | 2023 |
|
RU2818823C1 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЁТА В РЕЖИМЕ АВТОРОТАЦИИ | 2019 |
|
RU2721028C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ЧИСЛА ОБОРОТОВ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА В ДОПУСТИМЫХ ПРЕДЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231479C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
Изобретение относится к авиации. Техническим результатом является повышение точности определения зоны режимов «вихревого кольца» и момента запуска сигнала тревоги. Для этого предложен способ определения и сигнализации о приближении несущего винта (НВ) к зоне режимов «вихревого кольца» на предпосадочных маневрах одновинтового вертолета, который дополнительно включает то, что воздушную скорость набегающего потока вблизи несущего винта измеряют с помощью приемника воздушного давления (ПВД), установленного в законцовке лопасти, измеряют вертикальную скорость вертолета, угол тангажа вертолета, угол отклонения автомата перекоса в продольном направлении и вычисляют угол атаки НВ, тангенциальную и нормальную составляющие воздушной скорости набегающего потока в текущем времени, тангенциальную скорость набегающего потока вблизи несущего винта при ее уменьшении за счет воздействия встречных индуктивных скоростей, создаваемых вихревым следом НВ, и осевую скорость сравнивают с граничными параметрами зоны «вихревого кольца», при снижении вертолета с осевой скоростью более 3 м/с и тенгенциальной скоростью вблизи винта менее 45-50 км/ч летчику начинают сигнализировать о приближении к зоне «вихревого кольца» световыми и речевыми сигналами, а также в систему автоматического управления передают команду об уменьшении угла тангажа до посадочного значения, и одновременно стабилизируют вертикальную скорость снижения вертолета до значения не более 2,0 м/с. 1 з.п. ф-лы, 4 ил., 1 пр.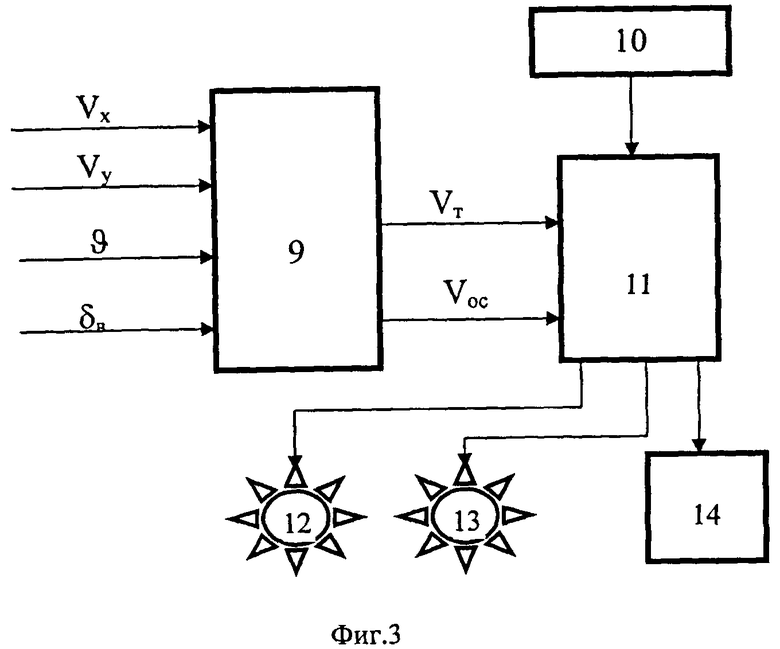
1. Способ определения и сигнализации о приближении несущего винта (НВ) к зоне режимов «вихревого кольца» на предпосадочных маневрах одновинтового вертолета, включающий измерение на предварительных летных испытаниях с помощью системы измерителей горизонтальной и вертикальной воздушной скорости вертолета, определение по этим парным величинам на осях абсцисс и ординаты диаграммы границ возникновения «вихревого кольца» вертолета, сравнение в течение предпосадочного маневра тангенциальной и нормальной скоростей воздушного потока с граничными параметрами зоны режима «вихревого кольца», определение и сигнализация о приближении к режиму «вихревого кольца» и формирование сигнала предупреждения, отличающийся тем, что воздушную скорость набегающего потока вблизи несущего винта измеряют с помощью приемника воздушного давления (ПВД), установленного в законцовке лопасти, на предпосадочных маневрах вертолета измеряют вертикальную скорость вертолета, угол тангажа вертолета, угол отклонения автомата перекоса в продольном направлении и вычисляют угол атаки НВ, тангенциальную и нормальную составляющие воздушной скорости набегающего потока в текущем времени по следующим формулам:

где α - угол атаки НВ, в градусах;
ϑ - угол тангажа вертолета, в градусах;
φзакл. - угол заклинения (наклона вперед) оси вращения НВ, в градусах;
δв - угол отклонения автомата перекоса в продольном направлении, в градусах;
D1 - передаточное отношение от автомата перекоса до равнодействующей тяги НВ;
Vy - вертикальная скорость вертолета, м/с;
Vx - горизонтальная скорость воздушного потока вблизи НВ, км/ч;
определяют суммарную тангенциальную скорость в плоскости концов лопастей:

и суммарную нормальную (осевую) скорость:

тангенциальную скорость набегающего потока вблизи несущего винта при ее уменьшении за счет воздействия встречных индуктивных скоростей, создаваемых вихревым следом НВ, и осевую (нормальную) скорость сравнивают с граничными параметрами зоны «вихревого кольца», а при снижении вертолета со скоростью более 3 м/с и воздушной скоростью вблизи винта менее 45-50 км/ч летчику начинают сигнализировать о приближении к зоне «вихревого кольца» световыми и речевыми сигналами, а также в систему автоматического управления (САУ) передают команду об уменьшении угла тангажа до посадочного значения, исключающего касание предохранительной пятой подстилающей поверхности, и одновременно стабилизируют вертикальную скорость снижения вертолета до значения не более 2,0 м/с.
2. Способ определения и сигнализации о приближении несущего винта (НВ) к зоне режимов «вихревого кольца» на предпосадочных маневрах одновинтового вертолета по п.1, отличающийся тем, что при попадании в режим «вихревое кольцо» тревожные сигналы усиливаются, что требует от летчика немедленного увеличения скорости полета и при наличии запаса мощности двигателя пытаться после разгона до Vx=40 км/ч уменьшить вертикальную скорость.
| US 7907066 В2, 15.03.2011 | |||
| US 7004426 В2, 28.02.2006 | |||
| WO 2000037310 A2, 29.06.2000 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ВИХРЕВОГО ОБРАЗОВАНИЯ НАД (ПЕРЕД) ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2005 |
|
RU2300089C2 |

