Заявляемая группа изобретений предназначена для использования в авиационной промышленности при проектировании и изготовлении новых типов вертолетов, в том числе высокоскоростных, предназначенных для эксплуатации в Государственной и Гражданской Авиации Российской Федерации, а также при модернизации вертолетов в условиях авиаремонтных заводов.
Более конкретно группа изобретений относится к интегрированному комплексу бортового оборудования вертолетов (ИКБОВ), а именно – к составной части измерительно-вычислительного комплекса, предназначенного для определения высотно-скоростных параметров вертолета (ВСПВ) и метеорологических параметров воздушной среды, окружающей вертолет, (МПВС) для всех этапов и режимов летной эксплуатации вертолетов.
Повышение требований к уровню безопасности полетов (БП) регламентированы Федеральными целевыми программами по обеспечению БП воздушных судов (ВС), эксплуатируемых в Государственной и Гражданской авиации Российской Федерации (ФЦП БП ВС РФ), а также Глобальным планом повышения уровня БП вертолетов в соответствии с требованиями ИКАО.
Эти требования обуславливают необходимость предупреждения систематически повторяющихся причин авиационных происшествий и серьезных инцидентов (АПиСИ) на вертолетах путем обеспечения экипажей вертолетов когнитивной интеллектуальной параметрической и сигнальной информацией о ВСПВ и МПВС, а именно:
- барометрической высоте полета;
- приборной и истинной воздушной скорости полета;
- величине компонентов вектора скорости ветра в связанной системе координат (ССК) и нормальной земной системе координат (НЗСК);
- о направлении ветра относительно Северного направлении меридиана, компонентах вектора ветра, а именно относительно продольной, поперечной и вертикальной осей вертолета, что особенно важно при маневрирования вертолета на малых скоростях полета и в высокоманевренных режимах полета;
- информации с оценкой маневренных возможностей вертолета в зоне влияния ветра;
- величине атмосферного давления, воздушной среды, окружающей вертолет на всех этапах и режимах полета;
- компонентах вектора сдвига ветра (СВ) в ССК и НЗСК;
- температуре воздушной среды, окружающей вертолет, в полете и на подстилающей поверхности.
Кроме того экипажу для безопасного пилотирования требуется упреждающая аварийно-предупреждающая сигнальная информация (АПСИ) о приближении/выходе вышеприведенных ВСПВ и МПВС к летным эксплуатационным ограничениям, регламентируемым руководством по летной эксплуатации (РЛЭ) типов вертолетов и Федеральными авиационными правилами полетов.
Обеспечение экипажа вертолета параметрической и сигнальной информацией о ВСПВ и МПВС закабинного пространства (ЗКП) для всех типов и режимов полета позволяет наиболее полно использовать летно-технические характеристики (ЛТХ) вертолета, повысить его экономические и боевые характеристики с учетом особенностей конструкции вертолета, аэродинамики его движения и управления, обеспечить экипаж своевременными предупреждениями о неблагоприятном влиянии на полет внешних воздействующих факторов (ВВФ) и предупредить систематически повторяющиеся причины АПиСИ.
Высокоточное определение ВСПВ и МПВС существенно усложняется значительными деформациями аэрометрического поля вертолета кинематическими и динамическими искажениями набегающего на планер вертолета возмущенного воздушного потока, связанного вращательными движениями вертолета относительно его центра масс на режимах маневрирования у подстилающей поверхности, висении, перемещениях с малыми поступательными скоростями вперед-назад, влево-вправо, вверх-вниз, а также значительным влиянием индуктивного воздушного потока, образованного вращающимся несущим винтом (НВ) и рулевым винтами (РВ) вертолета. Поэтому, возникает необходимость разработки вертолетного комплекса для определения ВСПВ и МПВС ЗКП, основанного на способе измерения параметров кинематически искаженного воздушного потока, набегающего на планер вертолета, измерений параметров индуктивного воздушного потока, образованного НВ и РВ, вычислении величины результирующей истинной воздушной скорости Vи∑ на основе измерений величин полных давлений результирующего воздушного потока Ри∑ , индуктивного воздушного потока Рind, результирующей температуры заторможенного потока ТТ∑ , статического давления воздушной массы, окружающей вертолет на подстилающей поверхности Р0 и на высоте полета РН , а также базы знаний для определения ВСПВ и МПВС с помощью аэрометрических преобразователей первичной информации параметров воздушного потока, набегающего на вертолет.
В настоящее время информационной основой используемых и разрабатываемых систем измерения и вычисления ВСПВ и МПВС являются приемники воздушных давлений (ПВД) самолетного типа, вынесенные на штанге за пределы площади, ометаемой НВ – «Приборное оборудование самолетов и вертолетов» (лекция), − http://zinref.ru/000_uchebniki/04755_samolet/008_00_00_Lektsia_Pribornoe_oborudovanie_samoletov_vertoletov_lekcia/000.htm.
При полете вертолета с поступательной приборной скоростью менее 50-70 км/ч существующие системы воздушных сигналов вертолетов (СВС) не могут обеспечить потребный Авиационными Правилами, например, АП-29 и приемлемый, установленный ИКАО уровень БП из-за недостаточного уровня ситуационной осведомленности экипажа вертолета о параметрах ВСПВ и МПВС, на малых скоростях полета вертолета, а также из-за отсутствия интегрированной упреждающей сигнальной информации, предупреждающей экипаж о возможном попадании вертолета в крайне опасные режимы полета самопроизвольного левого вращении (СЛВ), вихревого кольца (ВК), явлений «подхвата», «штопора» и взлетов/посадок с превышениями максимально-допустимых взлетных/ посадочных весов/масс.
В соответствии с источником информации: [В.В. Солдаткин «Система воздушных сигналов вертолета на основе неподвижного аэрометрического приемника и информации аэродинамического поля вихревой колонны несущего винта». Монография. Казань. 2012 г.] известны вертолетные ПВД, вращающиеся вместе с лопастями НВ, ПВД, сканирующие набегающий воздушный поток с помощью следящего электропривода или свободно ориентируемые по воздушному потоку с помощью флюгеров на вращающейся штанге, неподвижные многоканальные ПВД, разнесенные по фюзеляжу вертолета или, вписанные в конструкцию фюзеляжа. Расположения ПВД на лопастях НВ, на вращающейся штанге, сканирующие ПВД снижают надежность и качество работы системы воздушных сигналов (СВС) на малых скоростях полета. Применение неподвижных многоканальных или распределенных ПВД обеспечивает измерение ВСПВ и МПВС только при отсутствии на них воздействия индуктивного воздушного потока, образованного вращающимися несущим винтом (винтами) Vind. Неподвижный многоканальный панорамный приемник воздушных давлений обладает возможностями по обеспечению панорамного (в плоскости рысканья) и всенаправленного (при трехмерном измерении положения продольной оси вертолета) измерения и вычисления ВСПВ, расширяет нижнюю границу определения рабочих скоростей, которая обеспечивается за счет использования информации аэродинамического поля вихревой колонны НВ, принципы работы которого с существенными изменениями и дополнениями используются заявляемой группой изобретений.
Уровень техники
Известен патент Ru 2427844, G01Р5/14, опубликованный 27.08.2011 «Система воздушных сигналов вертолета», принятый в качестве аналога заявляемой группы изобретений, в котором приводятся способ определения высотно-скоростных параметров вертолета и описание устройства неподвижного, осесимметричного многоканального аэрометрического приемника, позволяющего определить ВСПВ в диапазоне малых околонулевых скоростей полета вертолета по аэрометрической информации, формируемой набегающим на него воздушным потоком вихревой колонны НВ, способ определения высотно-скоростных параметров вертолета с использованием проточных аэрометрических каналов и дифференциальных датчиков для измерения величии перепада давлений набегающего воздушного потока, образованных в проточных аэрометрических каналах многоканального проточного аэрометрического приемника, принятых за аналог заявляемой группы изобретений по способу определения высотно-скоростных параметров вертолета и технического устройства для его реализации. Описываемое изобретение относится к измерительным устройствам, в частности к устройствам для измерения ВСПВ. Устройство содержит неподвижный многоканальный проточный аэрометрический приемник (МПАП) в виде разнесенных по высоте экранирующих дисков, между которыми в азимутальной плоскости под одинаковыми углами расположены трубки приема полного давления воздушного потока, а на внутренних проточных профилированных поверхностях экранирующих дисков расположены отверстия, являющиеся приемниками дросселированного статического давления. Трубки полного давления и приемники дросселированного статического давления подключены к входам пневмоэлектрических преобразователей, выходы которых через последовательно соединенные мультиплексор и аналогово-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по ВСПВ.
Изобретение позволяет повысить точность СВС вертолета в области малых скоростей за счет использования одного неподвижного комбинированного аэрометрического приемника, установки ее на планере вертолета (осесимметрично относительно вектора скорости результирующего потока НВ). Указанный приемник хорошо обтекается набегающим воздушным потоком вихревой колонны НВ.
Однако технические решения по патенту Ru 2427844 не учитывают множества причин возникновения на вертолетах АПиСИ.
Заявленная СВС имеет ряд недостатков, например:
- не определяет метеорологическое направление и скорость ветра, а значит не обеспечивает экипаж параметрической и сигнальной информацией о боковой составляющей скорости ветра в левый и правый борт uб (uб.л.; uб.пр.), попутной составляющей скорости ветра ип и вертикальной составляющей скорости ветра ив, которые оказывают существенное влияние на безопасность полетов, особенно на этапах запуска двигателей и раскрутки трансмиссии, руления, взлетов/посадок по-вертолетному и по-самолетному, так как в случаях когда  ;
;  происходит потеря управляемости вертолетом, вертолет может попасть в режим СЛВ, а при повышенных вертикальных скоростях снижения и малой поступательной скорости, в режим ВК, что часто заканчивается тяжелым авиационным происшествием;
происходит потеря управляемости вертолетом, вертолет может попасть в режим СЛВ, а при повышенных вертикальных скоростях снижения и малой поступательной скорости, в режим ВК, что часто заканчивается тяжелым авиационным происшествием;
- не обеспечивает экипаж параметрической и сигнальной информацией о достижении: вертолетом приборной скорости  , что может привести к попаданию вертолета в «штопор»;
, что может привести к попаданию вертолета в «штопор»;
- не обеспечивает экипаж параметрической и сигнальной информацией о потребной барометрической безопасной высоте полета и, особенно, на малых приборных скоростях полета  в зависимости от характеристик рельефа подстилающей поверхности и используемых правил полетов, что может привести к столкновению вертолета с рельефом подстилающей поверхности;
в зависимости от характеристик рельефа подстилающей поверхности и используемых правил полетов, что может привести к столкновению вертолета с рельефом подстилающей поверхности;
- не обеспечивает экипаж когнитивными визуальными и речевыми интегральными предупреждающими подсказками о возможности возникновения опасной ситуации, связанной с попаданиями вертолета в режимы: ВК, СЛВ, «штопор», опасного превышения допустимой приборной скорости, попадания в режим «подхват», опасного воздействия ветра и не определяет зону безопасного маневрирования вертолета на взлетно-посадочных режимах относительно направления ветра и при маневрировании на малой высоте в условиях воздействия ветра;
- не определяет расчетные величины максимально допустимых взлетных/посадочных весов вертолета в зависимости от фактических метеорологических условий в месте взлета/посадки, способов/методов взлета/посадки, высоты расположения вертолетной взлетно-посадочной площадки (ВВПП) относительно уровня моря, использования противообледенительной системы (ПОС), использования пылезащитных устройств (ПЗУ), применяемых правил полетов;
- не обеспечивает экипаж информацией о скорости руления;
- не обеспечивает экипаж своевременной упреждающей информацией о возникновении в полете особых ситуаций, связанных с отклонениями ВСПВ и МПВС от номинальных летных эксплуатационных значений, регламентируемых РЛЭ типа вертолета.
В целом, исходя из вышеизложенного следует, что СВС, принятая в качестве аналога, не может обеспечить приемлемый уровень БП вертолетов.
Известен патент Ru 2592705 С2, опубликованный 27.07.2016 г. «Бортовая система измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета», принятый за прототип заявляемой группы изобретений по способу определения параметров вектора ветра и устройству для его осуществления.
Многоканальный неподвижный ветроприемник, приведенный в прототипе построен на основе многоканального проточного аэрометрического приемника разных видов давлений воздушного потока, окружающего вертолет, которые преобразуются и обрабатываются в соответствии со способом, позволяющим определять величину и направление вектора скорости ветра относительно продольной оси вертолета, обеспечивая панорамное измерение вектора скорости горизонтального ветра и компоненты вектора истинной воздушной скорости в ССК вертолета в соответствии с источником информации [В.В. Солдаткин. Система воздушных сигналов вертолета на основе неподвижного аэрометрического приемника и информации аэродинамического поля вихревой колонны несущего винта. Казань: Издательство казанского гос.техн.ун-та. 2012 г. С.48-80], в котором приводится описание устройства и способ определения ВСПВ.
В неподвижном многоканальном проточном аэрометрическом приемнике с помощью экранирующих дисков формируется профилированный воздушный поток, параметры которого зависят от величины и углов направления вектора скорости набегающего воздушного потока или вектора скорости ветра до запуска двигателей СУ. С помощью трубок полного давления, равномерно расположенных в проточном канале между верхним и нижним дисками воспринимаются давления Рi , зависящие от углового положения i-той трубки относительно направления набегающего воздушного потока в азимутальной плоскости вертолета. На входных кромках верхнего и нижнего экранирующих дисков располагаются отверстия для забора давлений РαВ и РαН , определяющие угол направления вектора истинной воздушной скорости/скорости ветра в вертикальной плоскости (угол α). На внутренних поверхностях экранирующих дисков имеются канавки, с помощью которых воспринимается дросселированное статическое давление Рст.Д , набегающего воздушного потока. Воспринимаемые давления Рi; РαВ; РαН; Рст.Д по пневмопроводам передаются на входы соответствующих пневмоэлектрических преобразователей.
Кроме того, неподвижный многоканальный проточный аэрометрический приемник имеет полусферический аэрометрический приемник полного давления результирующего воздушного потока вихревой колонны НВ – Рп∑ и отверстия, являющиеся приемниками давлений P1 и Р2 , определяющие угловое положение результирующей скорости набегающего воздушного потока вихревой колонны НВ в плоскости, параллельной плоскости симметрии вертолета, отверстия, являющиеся приемниками давлений Р3 и Р4 , определяющие угловое положение вектора  результирующей скорости набегающего на вертолет воздушного потока вихревой колонны НВ в плоскости, ортогональной плоскости симметрии вертолета. Кроме того, ветроприемник имеет отверстия, являющиеся приемниками статического давления Pcm.∑ результирующего воздушного потока вихревой колонны НВ.
результирующей скорости набегающего на вертолет воздушного потока вихревой колонны НВ в плоскости, ортогональной плоскости симметрии вертолета. Кроме того, ветроприемник имеет отверстия, являющиеся приемниками статического давления Pcm.∑ результирующего воздушного потока вихревой колонны НВ.
Приемники давлений Р1 и Р2 ; Р3 и Р4 ; Pn∑ и Pcm.∑ ; Рi ; РαВ и РαН ; Рст.Д соединены со входами пневмоэлектрических преобразователей перепадов давлений и датчиков абсолютного давления, выходы которых через канал аналогово-цифрового преобразования, т.е. через последовательно соединенные мультиплексор и аналогово-цифровой преобразователь, подключены ко входу вычислительного устройства, выходы которого являются выходами бортовой системы определения ВСПВ и параметров воздушной среды, окружающей вертолет, на всех этапах и режимах полета.
Кроме того, на вход вычислительного устройства через устройства аналогово-цифрового преобразования подключены выходы приемника температуры торможения результирующего воздушного потока вихревой колонны НВ - TТ, выходы спутниковой навигационной системы, определяющие продольную VРx и боковую VРz скорости руления вертолета по земной поверхности и выходы доплеровского измерителя путевой скорости W угла сноса УС вертолета.
При этом выход вычислительного устройства является выходом бортовой системы определения ВСПВ и МПВС, а именно выходом следующих параметров: истинной воздушной скорости Vu, приборной воздушной скорости Vп , углов атаки α и скольжения β , барометрической высоты Нбар , компонентов вектора истинной воздушной скорости  в ССК, скорости ветра U и его метеорологического направления δ м , продольной и боковой составляющих скорости ветра ux; uz в ССК.
в ССК, скорости ветра U и его метеорологического направления δ м , продольной и боковой составляющих скорости ветра ux; uz в ССК.
Однако вышеприведенный прототип способа и устройства определения ВСПВ и МПВС имеет ряд недостатков, а именно:
- аэрометрические каналы устройства приема давлений Рi; Рα B и РαН; Рп∑ и Pcm.∑ ; Рст.Д не защищены от обледенения и от механических примесей, содержащихся в атмосфере, что может привести к полному/частичному отказу устройства и большим погрешностям определения ВСПВ и МПВС особенно при попадании вертолета снежный/пыльный вихрь;
- отсутствуют влагоотстойники и пылесборники приемников воздушных давлений;
- компоненты вектора скорости ветра и вектора истинной воздушной скорости определяются в ССК, в то же время вектор ветра в соответствии с Наставлением по метеорологическому обеспечению полетов (НМО-ГА-95) компоненты вектора ветра определяются в НЗСК, т.к. ветер - воздушный поток, перемещающийся относительно подстилающей поверхности Земли;
- приемное устройство спутниковой навигационной системы - ПУ СНС не может определить компоненты вектора воздушной скорости руления вертолета в ССК, а определяет продольную составляющую путевой скорости WX и/или ее восточную We и северную составляющую WN в навигационной системе координат – ONEH, что не позволяет оценить величину боковой составляющей скорости ветра на этапе руления;
- определение компонентов скорости ветра с использованием доплеровских измерителей скорости и сноса (ДИСС) на малых и предельно малых высотах полета вертолета является сложной задачей, сильно зависящей от характеристик отражающей поверхности подстилающей поверхности (бетонные, асфальтобетонные вертолетные площадки, покрытые снегом, слякотью, водой, грунтовые площадки с разной плотностью грунта, покрытые снегом, кустарником, малопрочные грунтовые покрытия, ледовые вертолетные площадки), причем ДИСС имеет ошибки первого и второго рода;
- указанный способ и устройство не обеспечивают экипаж интеллектуальной информацией об отклонениях параметрической информации по ВСПВ и МПВС от их допустимых в летной эксплуатации номинальных значений, регламентируемых руководствами по летной и технической эксплуатации, что может привести к возникновению на борту вертолета особых ситуаций (ОС), регламентируемых Авиационными Правилами, например: АП-29, возникающих из ошибочных действий/бездействия экипажа, отказов авиационной техники (АТ), и неблагоприятного влияния ВВФ.
Кроме того, вышеприведенная бортовая система:
- не обеспечивает экипаж информацией о возможности возникновения СЛВ;
- не обеспечивает экипаж информацией о снижении вертолета ниже безопасной
высоты, т.е. о не выполнении условия - Нбар. ≤  ;
;
- не обеспечивает экипаж информацией для безопасного висения без перемещения вертолета относительно подстилающей поверхности, поскольку информация о векторе истинной скорости  не позволяет обеспечить режим висения вертолета, что особенно опасно в снежном/пыльном вихре;
не позволяет обеспечить режим висения вертолета, что особенно опасно в снежном/пыльном вихре;
- имеет большие погрешности определения компонентов вектора скорости ветра в НЗСК при больших значениях углов крена и тангажа;
- отсутствует модуль контроля включения/отключения обогрева многоканального приемника воздушных давлений с режимами работы АВТОМ./РУЧН., ВКЛ./ОТКЛ.
В целом, исходя из вышеизложенного следует, что СВС, принятые в качестве аналога и прототипа, не могут обеспечить приемлемый, и тем более потребный уровни БП вертолетов.
Известно одно из требований поправки 102 к приложению 8 ИКАО «Летная годность воздушных судов», вступивших в силу 18.11.2010 г., а для сертификации новых воздушных судов с 24.02.2013 г., Глава 6 «Система и оборудование вертолета», п. 6.1.1. требует оснастить вертолет утвержденными приборами, оборудованием и системами, необходимыми для обеспечения БП вертолетов в ожидаемых условиях эксплуатации. При проектировании приборов и оборудования должны учитываться аспекты «человеческого фактора», а пунктами 6.1.3; 6.3.2 предусматривается введение средств предупреждения экипажа о небезопасных состояниях систем в эксплуатации, обеспечивающих экипажу возможность предпринять корректирующие действия для предупреждения АПиСИ. Кроме того, ФЦП по обеспечению БП ВС РФ, эксплуатируемых в Гражданской и Государственной авиации, требуют оснастить вновь разрабатываемые ВС Бортовыми системами интеллектуальной информационной поддержки экипажей, реализуемые с использованием компьютерных технологий.
Эти обстоятельства учтены авторами на заявленную группу изобретений, а также учтены причинно-следственные связи возникновения ошибочных действий/бездействия экипажей, которые в свою очередь зависят от особенностей аэродинамики полетов вертолетов, внешних воздействующих факторов на вертолет, особенностей его управления, недостатки приборной индикации (изобразительности) параметрической и сигнальной информации, поскольку в настоящее время невозможно исключить эксплуатацию вертолетов в условиях неизвестного воздействия ветра, в условиях образования снежного и пыльного вихрей и потери экипажем визуальной видимости ориентиров на подстилающей поверхности ВВПП, неизвестного технического состояния ВВПП при выполнении полетов на необорудованные и неуправляемые ВВПП по правилам подбора посадочных площадок с воздуха.
Технический результат группы изобретений направлен на разработку способа интеллектуальной информационной поддержки экипажа вертолета по ВСПВ и МПВС на всех этапах и режимах летной эксплуатации вертолета и устройства для его реализации, направлен на повышение уровня ситуационной осведомленности экипажа о ВСПВ и МПВС, на достижение приемлемого уровня БП вертолетов, минимизацию причин возникновения АПиСИ из-за человеческого фактора при летной эксплуатации вертолетов Российского производства.
Первый технический результат направлен на реализацию способа определения ВСПВ, способа определения МПВС на всех этапах и режимах его полета и на реализацию способа интеллектуальной информационной поддержки экипажа по предупреждению АПиСИ по ВСПВ и МПВС при летной эксплуатации вертолета.
Способ, определяющий ВСПВ на всех этапах и режимах его полета, в том числе в диапазоне малых, околонулевых воздушных скоростей полета вертолета, использующий для этих целей аэрометрическую информацию, формируемую набегающим на него результирующим воздушным потоком, образованным пропульсивными силами вертолета и индуктивным воздушным потоком, образованным вращающимися лопастями НВ, а также воздушного потока, образованного ветром, использующий для измерения, вычисления ВСПВ математическую зависимость параметров подвижных/неподвижных воздушных масс, окружающих вертолет, а именно разных видов давлений, температуры, плотности воздушной массы, зависящей от высоты и скорости движения вертолета в околоземном воздушном пространстве, отличающийся тем, что заявляемый способ интеллектуальной информационной поддержки экипажа по ВСПВ и МПВС реализует расширение функциональных возможностей вертолета по обеспечению приемлемого уровня БП, а именно: определяет ВСПВ и МПВС для всех этапов и режимов полета вертолета, а также обеспечивает экипаж интеллектуальной информационной поддержкой, обеспечивает предупреждения АПиСИ, связанных с отклонениями параметрической информации по ВСПВ и МПВС от их номинальных эксплуатационных значений, вызванных ошибочными действиями/бездействием экипажа, отказами измерительно-вычислительных подсистем определения ВСПВ и МПВС и неблагоприятными воздействиями на вертолет ВВФ.
Причем, заявляемый способ определения ВСПВ и МПВС использует параметры кинематически и динамически искаженного результирующего воздушного потока, набегающего на планер вертолета, измерения параметров индуктивного воздушного потока, образованного вращающимися лопастями НВ и РВ вертолета, а также реализует вычисления компонентов вектора результирующей истинной воздушной скорости Vu∑ в НЗСК на основе измерений величин полных давлений результирующего воздушного потока Рn∑, вычисления компонентов вектора индуктивной воздушной скорости в ССК, измерений температуры заторможенного результирующего воздушного потока TТ∑ с использованием процедуры сглаживания пульсирующего статического давления воздушного потока, окружающего вертолет, образованного маховыми движениями лопастей НВ, и с использованием величины сглаженного статического давления воздушного потока, окружающего вертолет на подстилающей поверхности Р0 и на высоте полета РН, а также с использует базы знаний высококвалифицированных авиационных специалистов в области летной и технической эксплуатации вертолетов, в области расследований причин АПиСИ и в области определения ВСПВ и МПВС с помощью аэрометрических измерителей и преобразователей первичной информации параметров результирующего воздушного потока, набегающего на вертолет. Кроме того, заявляемый способ использует базы знаний авиационных экспертов о влиянии текущих величин отклонений параметров ВСПВ и МПВС от их нормируемых Руководством по летной эксплуатации значений, на образование в полете ОС, регламентируемых «Авиационными правилами часть 29. Нормы летной годности винтокрылых аппаратов транспортной категории».
Заявляемый способ для высокоточного определения ВСПВ и МПВС осуществляет алгоритмическую компенсацию кинематических и аэродинамических искажений параметров результирующего воздушного потока, образованных вращательными движениями вертолета и индуктивным воздушным потоком, созданным вращающимися лопастями НВ, а также осуществляет алгоритмическую компенсацию систематических и случайных инструментальных погрешностей датчиков первичной информации (ДПИ) и параметров нестабильности аэрометрических измерителей первичной информации, которые аппаратно реализуются на микромеханических датчиках абсолютного давления (ДАД) и температуры воздушного потока (ДТ), а также в заявляемый способ одновременно использует три аэродинамических эффекта: аэродинамический эффект преобразования кинетической энергии движущегося воздушного потока в потенциальную путем полного торможения результирующей скорости воздушного потока в приемных устройствах полного давления и в камере торможения возмущенной результирующей скорости набегающего потока, эффект аэродинамического деформирования результирующего воздушного потока, набегающего на криволинейную поверхность второго порядка типа «песочные часы» с целью существенного повышения динамического давления в зоне приема полных давлений набегающего воздушного потока, необходимого для регистрации (измерения) малых скоростей воздушного потока на этапах стоянки вертолета на ВВПП до запуска двигателей и раскрутки трансмиссии, маневрирования на малых воздушных скоростях и взлетно-посадочных режимах, аэродинамический эффект сглаживания полного давления пульсирующего воздушного потока, образованного маховыми движениями лопастей НВ, с целью повышения точности измерения статического давления окружающей вертолет воздушной среды.
Заявляемый способ обеспечивает приемлемый уровень БП вертолетов методом оценки отклонений абсолютных/относительных величин ВСПВ и МПВС от их допустимых в летной эксплуатации значений с оценкой возможности достижения их величин критических значений, создающих в полете аварийную ситуацию (АС) или катастрофическую ситуацию (КС), использует безразмерные коэффициенты аварийности и их безразмерные весовые коэффициенты, оценивает степень опасности отклонений ВСПВ и МПВС от их номинальных значений, которые являются источником информации для обеспечения экипажа когнитивной интеллектуальной визуально-речевой сигнальной информацией (КИВРСИ) о возникновении в полете ОС: усложненных условий полета (УУП), сложной ситуации (СС), АС и КС, причем заявляемый способ реализует минимизацию зон неопределенностей ВСПВ и МПВС для обеспечения своевременного принятия экипажем окончательных и правильных решений по управлению вертолетом.
Заявляемый способ определяет компоненты вектора невозмущенной истинной воздушной скорости вертолета в ССК, НЗСК, Гринвичской географической навигационной системе координат, кроме того, заявляемый способ использует методы комплексной обработки разнородной информации, а именно: информации о ВСПВ, инерциальной навигационной информации о векторе путевой скорости е ее компонентах в подвижной НЗСК, параметрах пространственного положения вертолета, параметрах вектора управления вертолетом, компонентах вектора перегрузок в ССК, компонентах вектора абсолютной угловой скорости вращения вертолета в ССК и, что особенно важно, заявляемый способ определяет компоненты вектора ветра в ССК, НЗСК и Гринвичской географической навигационной системе координат, необходимые экипажу для обеспечения безопасного пилотирования вертолета на взлетно-посадочных режимах полета, висения, перемещения вертолета на малых приборных скоростях относительно подстилающей поверхности, при выполнении строительно-монтажных работ, боевого применения вертолета и воздушной навигации, при этом заявляемый способ автоматически определяет безопасную по курсу зону маневрирования вертолета на малых высотах в условиях воздействия на вертолет ветра.
Заявляемый способ использует алгоритмическую компенсацию инструментальных погрешностей датчиков первичной информации с помощью их математических моделей и одновременно использует цифровую фильтрацию показаний датчиков давления и температуры, основанную на осреднении показаний датчиков первичной информации на скользящем среднем интервале времени, что необходимо для повышения точности измерений давлений, температуры.
Заявляемый способ для сглаживания пульсаций полного давления воздушного потока, образованного от маховых движений лопастей НВ, использует метод демпфирования пульсаций в высококачественной камере сглаживания со степенью
сглаживания пульсаций  , соответствующей атмосферной турбулентности воздушной среды, окружающей вертолет.
, соответствующей атмосферной турбулентности воздушной среды, окружающей вертолет.
Заявляемый способ непрерывно оценивает текущий уровень БП вертолетов, выявляет причины изменения его уровня в соответствии с классификацией нештатных ситуаций: УУП, СС, АС, КС, а также обеспечивает экипаж возможностью построить эффективное управление вертолетом по предупреждению АПиСИ, не допуская при этом влияния единичного отказа систем вертолета, единичной ошибки экипажа, единичного опасного воздействия ВВФ на возникновение АС или КС, если при этом функциональный отказ заявляемого устройства и/или ошибочное принятие экипажем решения, неблагоприятное влияние ВВФ и их неблагоприятные сочетания приводят к АС или КС, заявляемый способ также обеспечивает экипаж возможностью своевременного обнаружения отказа/отклонения и подсказкой для локализации, возникающей при этом ОС полета.
Заявляемый способ обеспечивает экипаж ранними и интеллектуальными предупреждениями о возможности возникновения в полете недопустимых в летной эксплуатации ОС, характерных для вертолетов, а именно: СЛВ, ВК, явлений «подхвата», выхода ВСПВ на/за границы максимально/минимально допустимых воздушных приборных скоростей, ранними предупреждениями о возможности столкновения вертолета с рельефом подстилающей поверхности, а также ранними предупреждениями об опасной скорости сближения с подстилающей поверхностью, полете ниже потребной безопасной высоты полета, ранними предупреждениями об опасном воздействии на вертолет компонентов вектора ветра и о возможности потери управляемости вертолетом.
Заявляемый способ своевременно формирует КИВРСИ с выработкой команд-подсказок по управляющим действиям экипажа, направленных на изменения режима полета, траектории полета с целью локализации возникающих в полете нештатных ситуаций и раннего предупреждения АПиСИ путем идентификации возникшей ОС и уровня ее опасности, кроме того заявляемый способ обеспечивает оперативный доступ экипажа к интегральным визуально-речевым подсказкам, предназначенным для своевременной и безопасной локализации (блокирования) и ликвидации последствий возникшей проблемы, связанной с неблагоприятными сочетаниями величин относительных отклонений ВСПВ и МПВС от их нормируемых эксплуатационных значений, ошибками экипажа в технике пилотирования и отказами AT, а также заявляемый способ обеспечивает приемлемый уровень БП вертолетов в нормальных эксплуатационных условиях полета и при возникновениях в полете УУП, СС, АС, КС с целью недопущения перехода УУП и СС в АС и КС.
Заявляемый способ повышает уровень ситуационной осведомленности экипажа в понимании возникающих ошибок в технике пилотирования, опасном воздействии внешних факторов на полет вертолета и отказах AT, а также заявляемый способ обеспечивает необходимый запас путевой, поперечной, продольной управляемости на взлетно-посадочных режимах полета, маневрирования на малых высотах, боевого применения, выполнения полетов на необорудованные и неуправляемые ВВПП, особенно с предельным взлетным/посадочным весом и в условиях высоких температур, низких давлений и опасного воздействия ветра.
Заявляемый способ создает условия для автоматического вычисления расчетной величины максимально-допустимого взлетного/посадочного веса вертолета для фактически сложившихся метеорологических условий взлета/посадки вертолета в зависимости от выбранного экипажем метода взлета/посадки, используемых правил полетов, использования экипажем ПОС и ПЗУ и видов выполняемых работ на основании измеренных и вычисленных МПВС, независимо от наличия/отсутствия в месте взлета/посадки вертолета технических средств для определения МПВС.
Заявляемый способ определяет малые приборные скорости полета вертолета на взлетно-посадочных режимах полета, затормаживания, маневрирования вертолета над подстилающей поверхностью, а также скорость ветра и его встречную/попутную, боковые составляющие в левый и правый борт, определяет безопасную зону маневрирования вертолета по курсу относительно направления ветра, обеспечивает экипаж ранними предупреждениями о возможности опрокидывания вертолета при маневрировании на подстилающей поверхности, непрерывно контролирует положение вертолета на глиссаде снижения при заходе на посадку, в том числе и при заходе на посадку на необорудованные и неуправляемые ВВПП.
Второй технический результат группы изобретений направлен на разработку устройства для определения ВСПВ и МПВС, а также информационной поддержки экипажа по предупреждению АПиСИ, связанных с ошибочными действиями/ бездействием экипажа в технике пилотирования, отказами измерительно-вычислительных подсистем заявляемого устройства, неблагоприятном воздействием на вертолет ВВФ.
Устройство, предназначенное для определения ВСПВ, параметров подвижного воздушного потока, набегающего на вертолет, в том числе и в диапазоне малых околонулевых скоростей полета вертолета по аэрометрической информации, формируемой набегающим на него воздушным потоком, образованным пропульсивными силами вертолета и вихревой колонной НВ, представляющее собой неподвижный осесимметричный многоканальный аэрометрический приемник, содержащий проточные аэрометрические каналы, предназначенные для создания перепада давлений набегающего воздушного потока в проточных аэрометрических каналах МПАП и измерения величин перепадов давлений с помощью дифференциальных датчиков давлений, причем МПАП содержит разнесенные по высоте экранирующие диски, между которыми в азимутальной плоскости под одинаковыми углами расположены трубки приема полного давления воздушного потока, а на внутренних проточных профилированных поверхностях экранирующих дисков расположены отверстия, являющиеся приемниками дросселированного статического давления, при этом трубки полного давления и приемники дросселированного статического давления подключены к входам пневмоэлектрических преобразователей, выходы которых через последовательно соединенные мультиплексор и аналогово-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по ВСПВ, при этом заявляемое устройство отличающееся тем, что оно обладает расширенными функциональными возможностями, а именно: заявляемое устройство на борту вертолета используется как для определения ВСПВ, так и для определения МПВС и интеллектуально поддерживает экипаж ранними предупреждениями при возникновении в полете нештатных ситуаций по ВСПВ и МПВС из-за нестандартных ошибочных действий/бездействия экипажа, отказов AT, неблагоприятного влияния ВВФ и/или неблагоприятного сочетания вышеприведенных факторов, также является техническим устройством для интеллектуальной информационной поддержки экипажа по предупреждению АПиСИ, связанных с отклонениями параметров ВСПВ и МПВС от их номинальных эксплуатационных значений, установленных требованиями РЛЭ типа вертолета, инструкцией по технической эксплуатации типа вертолета и которые могут достигать критических значений и создавать угрозу БП вертолетов. При этом, заявляемое устройство представляет собой аппаратно-программный электронный измерительно-вычислительный комплекс следующего поколения, который содержит в своем составе хорошо обтекаемое воздушными потоками осесимметричное тело вращения с криволинейной профилированной поверхностью второго порядка типа «песочные часы», а именно аэрометрический многоканальный панорамный приемник параметров результирующего подвижного/неподвижного воздушного потока, набегающего на вертолет, (АМПППВП) причем в верхней части заявляемый АМПППВП конструктивно содержит полусферическую поверхность с приемными устройствами полных давлений результирующего воздушного потока Рi1; Рi2; Рi3; Pi4 … Pi∑ , образованного возмущенным набегающим воздушным потоком на планер вертолета пропульсивными силами вертолета и индуктивным воздушным потоком, образованным вращающимся НВ и РВ, кроме того АМПППВП в средней части профилированной поверхности второго порядка содержит цилиндрическую поверхность с приемными устройствами полных давлений результирующего воздушного потока, образованного возмущенным воздушным потоком, набегающим на планер вертолета при его движении в окружающей воздушной среде, воздушным потоком, связанным с переносом воздушных масс относительно подстилающей поверхности (ветром) и частично составляющими скорости индуктивного воздушного потока, при этом приемные устройства полных давлений Р1; Р2 ; Р3;Р4; Р5; Р6 располагаются в азимутальной плоскости симметрии вертолета XOZ под одинаковыми углами относительно продольной оси вертолета в ССК, причем для высокоскоростных вертолетов АМПППВП в средней части может содержать правильную многогранную призму, количество граней которой зависит от максимально-допустимой воздушной скорости вертолета. Кроме того, заявляемый АМПППВП в нижней части имеет цилиндрическую поверхность внутри которой содержится камера сглаживания (демпфирования) статического давления пульсирующего результирующего воздушного потока и камера полного торможения скорости результирующего воздушного потока, в которых устанавливаются основные и резервные микромеханические датчики полного давления и температуры результирующего заторможенного воздушного потока, причем датчики температуры и давления в этих камерах теплоизолированы от стенок камер, в целом АМПППВП представляет собой законченное техническое устройство, содержащее электрически обогреваемые миниатюрные приемные устройства полного торможения скорости результирующего воздушного потока, набегающего на АМПППВП, с камерами полного торможения скорости результирующего воздушного потока и сглаживания полного давления пульсирующего результирующего воздушного потока, образованного маховыми движениями лопастей НВ, кроме того АМПППВП содержит электронный измерительно-вычислительный модуль (ЭИВМ) с электронными компонентами, а именно: верхнюю и нижнюю печатные платы с микромеханическими датчиками полных (абсолютных) давлений результирующего воздушного потока (ДАД) и его температуры (ДТ) с электронными компонентами сервисной электроники, обеспечивающими электрическое питание ДАД и ДТ, электрообогрев приемных устройств полных давлений, модуль преобразования аналоговых и дискретных сигналов датчиков первичной информации в цифровые коды (МПАиДС), модуль связи и сопряжения (МСС) цифровых кодов ДАД и ДТ, с вычислителем ВСПВ и МПВС, решающим задачи вычисления ВСПВ и МПВС и алгоритмической компенсации инструментальных погрешностей датчиков первичной информации − датчиков полного давления, статического давления и температуры результирующего воздушного потока, набегающего на АМПППВП, а также модуль связи и сопряжения с вычислительным модулем ВСПВ и МПВС воздушной среды, окружающей вертолет (ВМ ВСПВ и МПВС) бортового цифрового вычислительно-управляющего комплекса вертолета (ВМ ВСПВ и МПВС БЦВУК), выход которого по высокоскоростным помехозащищенным цифровым линиям связи, например, мультиплексного канала информационного обмена (МКИО) спецификации ARINC 818, связан с входами улучшенной кабинной дисплейной системы экипажа (Enhanced Cabine Display System - ECDS), а именно: с входами комплексного пилотажного дисплея (КПД), пилотажного дисплея на фоне лобового стекла (ПДЛС), многофункционального дисплея (МФД), комплексного дисплея навигационной обстановки (КДНО), на которых обеспечивается когнитивное отображение параметрической информации о ВСПВ и МПВС, в том числе когнитивной визуальной сигнальной информации, кроме того в систему внутренней связи экипажа выводится речевая информация и речевые команды-подсказки, предназначенные для информационной поддержки экипажа для предупреждения АПиСИ и обеспечения приемлемого уровня БП вертолетов.
В заявляемом устройстве с целью минимизации влияния инертности на измерения параметров результирующего воздушного потока входы датчиков полного давления по коротким пневмопроводам соединяются с выходами приемных устройств полных давлений, которые имеют дренажные отверстия для удаления влаги и механических примесей, содержащихся в атмосферном воздухе, а цифровые выходы ДАД и ДТ через МСС соединены с входом вычислителя ВСПВ электронного блока, выходы которого являются параметрами ВСПВ, при этом АМПППВП имеет электрический разъем для подачи электропитания на обогрев приемных устройств и электропитания электронных компонентов АМПППВП и высокочастотный электрический разъем для выдачи цифровой информации о ВСПВ в ВМ ВСПВ и МПВС БЦВУК.
Заявляемое устройство для обеспечения информационной поддержки экипажа по предупреждению АПиСИ по высокоскоростным цифровым линиям связи информационного обмена, например, по МКИО спецификаций ARINC 429 или ARINC 664, непрерывно взаимодействует с ВМ ВСПВ и МПВС БЦВУК.
В заявляемом устройстве для обеспечения экипажа интеллектуальной информационной поддержкой вычислительный модуль (ВМ) ВСПВ и МПВС БЦВУК содержит множество баз данных: летно-технических характеристик (ЛТХ) типа вертолета, летных эксплуатационных ограничений типа вертолета по ВСПВ и МПВС, пилотажных и технических параметров определения ВСПВ и МПВС, библиотеку данных безразмерных нормируемых коэффициентов БП, характеризующих относительные величины отклонений ВСПВ и МПВС от их номинальных эксплуатационных значений и создающих в полете ОС в зависимости от величин отклонений с их весовыми коэффициентами, оценивающими уровень опасности ОС, базу данных обобщенных критериев возникновения опасных режимов полета для вертолета СЛВ, ВК, явлений «подхвата» и «штопора», выхода вертолета на границы максимально/минимально допустимых приборных скоростей, базы данных для предупреждения потери управляемости из-за опасного воздействия боковой и попутной составляющих скорости ветра и предупреждения взлета/посадки с превышениями максимально-допустимых взлетных/посадочных весов, а также предупреждения снижения вертолета ниже минимально-допустимых высот полета, предупреждения снижения с опасной вертикальной скоростью и опасного сближения с рельефом подстилающей поверхности.
Общий технический результат группы изобретений, направлен на обеспечение приемлемого уровня БП вертолетов, снижение количества АПиСИ, минимизацию влияния человеческого фактора на БП вертолетов за счет организации интеллектуальной информационной поддержки экипажа вертолета на всех этапах и режимах его полета с использованием заявляемых способа, устройства и достигается тем, что заявляемые способ, устройство позволяют получить синергетический эффект, повышающий ситуационную осведомленность экипажа о ВСПВ и МПВС, обеспечивает экипаж возможностью осуществлять непрерывный контроль в полете за изменением уровня БП из-за ошибочных нестандартных действий экипажа, неблагоприятных опасных воздействий ВВФ на вертолет, отказов AT путем непрерывной регистрации изменения параметров полета и их отклонений от установленных стандартных требований и прогнозировать появление нештатных и особых ситуаций и особых случаев в процессе полета, обеспечивая своевременный их контроль и локализацию прогнозируемых АПиСИ путем выдачи экипажу когнитивной уведомляющей, предупреждающей и аварийной сигнализации, а также когнитивных интегральных визуально-речевых подсказок для изменения алгоритмов управления вертолетом и принятия своевременных и правильных управляющих воздействий по директорным командам-подсказкам, вырабатываемых ВМ ВСПВ и МПВС БЦВУК для изменения режима полета с целью поддержания приемлемого уровня БП, причем вышеназванные способ, устройство обладают возможностью прогнозирования возникновения опасного режима полета, характерного для вертолетов, с фиксированным упреждением срабатывания АПСИ, прогнозирующей возникновение УУП, СС, АС, КС со временем достаточным для того, чтобы экипаж локализовал особые ситуации полета и не допустил перехода УУП, СС в АС, КС при единичных ошибках экипажа, отказах AT и опасных ВВФ, а при их неблагоприятных сочетаниях, вызывающих АС, КС обеспечивают экипаж визуально-речевыми упреждающими подсказками по их локализации.
РАСКРЫТИЕ СУЩНОСТИ ГРУППЫ ИЗОБРЕТЕНИЙ
Раскрытие сущности группы изобретений поясняется чертежами и рисунками, приведенными на Фигурах 1,2, а также описанием алгоритмов работы устройства и способа определения ВСПВ и МПВС.
На Фигуре 1 приводится конструктивная схема устройства АМПППВП для вертолетов с каналами приема параметров возмущенного результирующего набегающего воздушного потока на АМПППВП в месте его установки на фюзеляже вертолета в зоне влияния индуктивного воздушного потока, когда величины полного давления результирующего воздушного потока и величина результирующей истинной воздушной скорости определяются из выражений:
Р∑ = Р∞ наб + Рind+Рветра; (1)
Vи∑ = f (Р∞ наб.; Рind; Рветра ; ТТ; Т0 (ТН); ТМСА; Р0 (РН); РМСА), где (2)
Р∑ − полное давление возмущенного результирующего воздушного потока, набегающего на АМПППВП;
Р∞ наб − полное давление невозмущенного результирующего воздушного потока, набегающего на АМПППВП;
Рind − осредненное по ометаемой площади НВ полное давление индуктивного воздушного потока, образованного работающим НВ;
Рветра − полное давление воздушного потока, образованного ветром;
Vи∑ − величина результирующей истинной воздушной скорости воздушного потока, набегающего на вертолет в ССК и НЗСК;
TТ − температура заторможенного результирующего воздушного потока;
Т0 − температура воздушных масс у подстилающей поверхности;
TН — температура воздушных масс на высоте полета вертолета;
Тмса − величина температуры воздушных масс у подстилающей поверхности, определяемая Международной стандартной атмосферой (МСА) (Тмса = 15°С или 288,15°К);
Р0 − величина атмосферного давления у подстилающей поверхности;
РН − величина атмосферного давления на высоте полета вертолета;
Рмса − величина давления воздушных масс у подстилающей поверхности, определяемая МСА (Рмса = 1013,25 мбар., 760 мм рт.ст. или 10332,3 кг/м2).
На Фигуре 1 приводится чертеж устройства АМПППВП, предназначенного для формирования измерений ВСПВ и МПВС, на котором приняты следующие условные обозначения:
1 − фланец АМПППВП для его крепления к фюзеляжу вертолета или к втулке несущего винта в надвтулочном пространстве или к пилонам, размещенным в передней части фюзеляжа вертолета слева и справа относительно продольной оси симметрии вертолета в зоне влияния индуктивного воздушного потока;
2 − отверстия для крепления АМПППВП;
3 − электронагревательный элемент приемных устройств полного давления возмущенного набегающего воздушного потока;
4 − камера для сглаживания пульсирующего полного давления результирующего воздушного потока, качество которой оценивается степенью демпфирования пульсаций результирующего воздушного потока, набегающего на АМПППВП:
(3)
 − среднеквадратические турбулентные пульсации компонентов вектора результирующей истинной воздушной скорости вертолета Vи [VиХ; VиY; VиZ] в направлении связанных осей координат вертолета. Поскольку в АМПППВП имеет место изотропная пульсация воздушного потока, при которой
− среднеквадратические турбулентные пульсации компонентов вектора результирующей истинной воздушной скорости вертолета Vи [VиХ; VиY; VиZ] в направлении связанных осей координат вертолета. Поскольку в АМПППВП имеет место изотропная пульсация воздушного потока, при которой  то степень сглаживания пульсаций определяется как:
то степень сглаживания пульсаций определяется как:  . Измерения Рст соответствуют величине атмосферного давления, если степень турбулентности ε = 0,02 %, т.е. соответствует атмосферной турбулентности;
. Измерения Рст соответствуют величине атмосферного давления, если степень турбулентности ε = 0,02 %, т.е. соответствует атмосферной турбулентности;
5 − резервный датчик температуры наружного воздуха, термоизолированный от корпуса АМПППВП;
6 − кольца наружного и внутреннего контуров сглаживания пульсирующего полного давления результирующего воздушного потока, набегающего на АМПППВП;
7 − нижняя цилиндрическая часть корпуса АМПППВП с внутренним теплоизолирующим слоем для исключения влияния нагрева и охлаждения корпуса АМПППВП на точность измерения температуры окружающего воздуха;
8 − корпус камеры полного торможения результирующей скорости воздушного потока с теплоизолирующим слоем;
9 − камера полного торможения скорости результирующего воздушного потока;
10 − основной датчик температуры заторможенного потока воздуха, термоизолированный от корпуса АМПППВП;
11 − приемные отверстия камеры полного торможения результирующего воздушного потока;
12 − узел крепления электронного блока к корпусу АМПППВП;
13 − печатные платы с радиоэлектронными компонентами электронного блока АМПППВП;
14 − верхняя цилиндрическая часть корпуса АМПППВП;
15 − конструктивный элемент АМПППВП для крепления электронного блока с датчиками абсолютного давления;
16 − блок датчиков абсолютного давления ДАД результирующего набегающего на АМПППВП воздушного потока;
17 − поверхность второго порядка, профилированная под поверхность «Вентури» (поверхность типа «песочные часы»);
18 − верхняя цилиндрическая часть АМПППВП с приемниками полного давления результирующего набегающего воздушного потока;
19 − электронагревательные элементы ЭНЭ2 приемных устройств полного давления;
20 − отверстия в верхней цилиндрической части АМПППВП для монтажа приемных устройств полных давлений P1; Р2 ; Р3 ; Р4 ; Р5 ; Р6 результирующего воздушного потока;
21 − конструктивный элемент для крепления полусферический части АМПППВП к профилированной части АМПППВП;
22 − дренажные отверстия для удаления влаги и механических примесей, содержащихся в атмосферном воздухе, окружающем вертолет;
23 − конструктивный элемент полусферической части АМПППВП (дефлектор для сбора влаги и механических примесей и монтажа пневмопроводов);
24 − полусферическая поверхность с приемными устройствами полных давлений результирующего воздушного потока, составляющими которого являются индуктивный воздушный поток, образованный вращающимися лопастями НВ и РВ и набегающий на планер вертолета воздушный поток, образованный пропульсивными силами силовой установки и ветром;
25 − электронагревательный элемент приемных устройств полных давлений полусферической части АМПППВП;
26 − осесимметричные приемные отверстия полусферической части АМПППВП для монтажа приемных устройств полных давлений результирующего воздушного потока с приемными устройствами Р1i ÷ Р4i и Р∑ i ;
27 − резервный микромеханический датчик температуры заторможенного потока воздуха, термоизолированный от корпуса АМПППВП;
28 − внутренний стакан камеры сглаживания;
29 − основной микромеханический датчик сглаженного статического давления окружающей вертолет воздушной среды на подстилающей поверхности или на высоте полета ДАДCТ.ОСН, термоизолированный от корпуса АМПППВП;
30 − резервный микромеханический датчик сглаженного статического давления окружающей вертолет воздушной среды на подстилающей поверхности или на высоте полета ДАДСТ.РЕЗЕРВ., термоизолированный от корпуса АМПППВП;
31 − основной микромеханический датчик температуры наружного воздуха ДТНВ, термоизолированный от корпуса АМПППВП;
32 − отверстия для приема возмущенного статического давления окружающей вертолет внешней среды;
33 − дренажные отверстия для удаления влаги и механических примесей, содержащихся в атмосферном воздухе, окружающем вертолет;
34 − электрический разъем для выдачи цифровых кодов высотно-скоростных параметров вертолета в БЦВУК;
35 − электрический разъем (соединитель) для подачи напряжения питания и для обогрева АМПППВП.
Структурно-функциональная схема построения технического устройства для определения ВСПВ и МПВС с использованием АМПППВП приведена на Фигуре 2.
На Фигуре 2 приняты следующие условные обозначения и сокращения:
36 − электронный модуль преобразования аналоговых и дискретных сигналов датчиков первичной информации: датчиков абсолютного давления воздушного потока, датчиков температуры заторможенного потока воздуха, датчиков температуры окружающей вертолет воздушной среды, датчиков статического давления в цифровые коды в соответствии с материалами, принятыми в ГОСТ 18977-75 и Руководящим техническим материалом РТМ 1495-75 (ARINC-429 с изм. 2 и 3);
37 − электронный модуль связи и сопряжения с микропроцессором;
38 − вычислитель ВСПВ и МПВС;
39 − бортовой цифровой вычислительно-управляющий комплекс вертолета (БЦВУК);
40 − вычислительный модуль ВСПВ и МПВС - ВМ ВСПВ и МПВС 40 бортового цифрового вычислительно-управляющего комплекса БЦВУК 39.
ДАД −микромеханические датчики абсолютного давления заторможенного потока воздуха;
ДТ − датчик температуры сглаженного потока воздуха;
U1 ÷ U8 , U∑, U ct , UТ − электрические сигналы первичной информации с датчиков полного давления, статического давления и температуры сглаженного потока воздуха;
Ni, Nj − цифровые коды давлений и температуры;
Т НВ − тяга несущего винта;
γ − угол крена;
ϑ − угол тангажа;
МСС − модуль связи и сопряжения;
МПАиДС − модуль преобразования аналоговых и дискретных сигналов в цифровые коды;
ОХgYg Zg − нормальная земная система координат (НЗСК);
О X Y Z − связанная система координат (ССК);
OXαYαZα − скоростная система координат (скоростная СК);
ONEH − нормальная Гринвичская географическая навигационная система координат;
═══ − пневмопроводы;
 − компоненты вектора истинной воздушной скорости невозмущенного воздушного потока, набегающего на вертолет в ССК;
− компоненты вектора истинной воздушной скорости невозмущенного воздушного потока, набегающего на вертолет в ССК;
 − компоненты вектора истинной воздушной скорости индуктивного воздушного потока, образованного работающим НВ в ССК;
− компоненты вектора истинной воздушной скорости индуктивного воздушного потока, образованного работающим НВ в ССК;
 − компоненты вектора истинной воздушной скорости результирующего воздушного потока, набегающего на фюзеляж вертолета в ССК;
− компоненты вектора истинной воздушной скорости результирующего воздушного потока, набегающего на фюзеляж вертолета в ССК;
 − компоненты вектора истинной воздушной скорости
− компоненты вектора истинной воздушной скорости
результирующего воздушного потока, набегающего на фюзеляж вертолета в скоростной СК;
Vu − модуль вектора истинной воздушной скорости вертолета;
Vп − модуль вектора приборной воздушной скорости вертолета;
 − расчетная величина максимально допустимого взлетного/посадочного веса вертолета в зависимости от способов взлета/посадки, МПВС, используемых правил полетов, видов выполняемых работ, которая определяется в соответствии с методологией, приведенной в РЛЭ типа вертолета;
− расчетная величина максимально допустимого взлетного/посадочного веса вертолета в зависимости от способов взлета/посадки, МПВС, используемых правил полетов, видов выполняемых работ, которая определяется в соответствии с методологией, приведенной в РЛЭ типа вертолета;
 − компоненты вектора истинной воздушной скорости в Гринвичской географической навигационной системе координат (географическом трехграннике ONEH);
− компоненты вектора истинной воздушной скорости в Гринвичской географической навигационной системе координат (географическом трехграннике ONEH);
 − компоненты вектора истинной воздушной скорости в НЗСК;
− компоненты вектора истинной воздушной скорости в НЗСК;
 − компоненты вектора возмущенной истинной воздушной скорости в ССК;
− компоненты вектора возмущенной истинной воздушной скорости в ССК;
 − компоненты вектора возмущенной истинной воздушной скорости в скоростной СК;
− компоненты вектора возмущенной истинной воздушной скорости в скоростной СК;
 − компоненты вектора скорости ветра в Гринвичской географической системе координат (географическом трехграннике ONEH);
− компоненты вектора скорости ветра в Гринвичской географической системе координат (географическом трехграннике ONEH);
 − компоненты вектора скорости ветра в НЗСК;
− компоненты вектора скорости ветра в НЗСК;
 − компоненты вектора скорости ветра в ССК;
− компоненты вектора скорости ветра в ССК;
 − компоненты вектора скорости ветра в скоростной СК;
− компоненты вектора скорости ветра в скоростной СК;
U и δ − скорость и направление метеорологического ветра;
Рст − величина статического давления воздушной среды, окружающей вертолет;
tHB − температура наружного воздуха окружающей вертолет воздушной среды;
Нбар − барометрическая высота полета вертолета (абсолютная и относительная);
 = f (Нрел..;λ;ϕ) − потребная безопасная высота полета, предупреждающая столкновения вертолета с рельефом подстилающей поверхности искусственными препятствиями на нем, изобразительность которой наложена на цифровую карту местности;
= f (Нрел..;λ;ϕ) − потребная безопасная высота полета, предупреждающая столкновения вертолета с рельефом подстилающей поверхности искусственными препятствиями на нем, изобразительность которой наложена на цифровую карту местности;
Vв − вертикальная скорость полета − градиент изменения высоты полета за 1 с;
α − расчетная величина угла атаки НВ (планера);
β − измеряемая величина угла скольжения вертолета.
Описание работы заявляемой группы изобретений
Для измерения и вычисления ВСПВ и МПВС в области малых поступательных скоростей и на этапах висения, взлетно-посадочных режимах, когда АМПППВП находится в зоне влияния индуктивного воздушного потока от НВ со скоростью Vind, используется полусферическая часть 24 с приемниками полных давлений результирующего воздушного г потока Рi1 – Рi2 ; Pi3 – Pi4 ; P∑i 26, определяющих пространственное угловое положение вектора  , результирующей скорости набегающего на вертолет воздушного потока в зависимости от положения ручки циклического шага
, результирующей скорости набегающего на вертолет воздушного потока в зависимости от положения ручки циклического шага  и общего шага несущего винта ϕнв в ССК в соответствии с векторным уравнением:
и общего шага несущего винта ϕнв в ССК в соответствии с векторным уравнением:
 (4)
(4)
Для определения ВСПВ и МПВС, а именно параметров вектора истинной воздушной скорости  в ССК, параметров вектора истинной воздушной скорости
в ССК, параметров вектора истинной воздушной скорости  в НЗСК или параметров вектора истинной воздушной скорости
в НЗСК или параметров вектора истинной воздушной скорости  в нормальной Гринвичской географической навигационной системе координат (географическом трехграннике ONEH), параметров вектора ветра
в нормальной Гринвичской географической навигационной системе координат (географическом трехграннике ONEH), параметров вектора ветра  в НЗСК, параметров вектора ветра
в НЗСК, параметров вектора ветра  в ССК, параметров вектора ветра
в ССК, параметров вектора ветра  в географическом трехграннике ONEH, а также барометрической высоты Нбар в зависимости от уровня отсчета высоты (относительной, абсолютной или приведенной к уровню моря), вертикальной скорости полета вертолета Vв, приборной скорости полета вертолета Vп и в соответствии с фигурами 1 и 2 приемные устройства полных давлений результирующего воздушного потока Рi1 – Pi2; Рi3 – Pi4; P∑ i 26 с помощью дюритовых трубок (пневмопроводов) соединяются с входами датчиков абсолютного давления, а именно Рi1 с ДАД1 и аналогично Pi2 с ДАД2i ÷ Pi5(P∑ i) с ДАД5i, электрические выходы которых соединены с входами аналого-цифровых преобразователей (АЦП) электронного модуля преобразования аналоговых и дискретных сигналов в цифровой код МПАиДС 36 АМПППВП, выходы которого в свою очередь через модуль связи и сопряжения МСС 37 соединяются с входом ВМ ВСПВ 38, на выходе которого формируются ВСПВ.
в географическом трехграннике ONEH, а также барометрической высоты Нбар в зависимости от уровня отсчета высоты (относительной, абсолютной или приведенной к уровню моря), вертикальной скорости полета вертолета Vв, приборной скорости полета вертолета Vп и в соответствии с фигурами 1 и 2 приемные устройства полных давлений результирующего воздушного потока Рi1 – Pi2; Рi3 – Pi4; P∑ i 26 с помощью дюритовых трубок (пневмопроводов) соединяются с входами датчиков абсолютного давления, а именно Рi1 с ДАД1 и аналогично Pi2 с ДАД2i ÷ Pi5(P∑ i) с ДАД5i, электрические выходы которых соединены с входами аналого-цифровых преобразователей (АЦП) электронного модуля преобразования аналоговых и дискретных сигналов в цифровой код МПАиДС 36 АМПППВП, выходы которого в свою очередь через модуль связи и сопряжения МСС 37 соединяются с входом ВМ ВСПВ 38, на выходе которого формируются ВСПВ.
Цифровые коды с выходов датчиков статического давления основного ДАДСТ.ОСН. 29 и резервного ДАДСТ.РЕЗЕРВ. 30 , датчиков температуры окружающей среды основного ДТНВ.ОСН. 31 и резервного ДТНВ.РЕЗЕРВ. 4, расположенных в камере сглаженного статического давления, поступают на вход МСС 37, а в последующем на вход вычислителя ВСПВ 38. Цифровые коды с выходов датчиков температуры результирующего заторможенного потока воздуха основного ДТТ ОСН. 10 и резервного ДТТ РЕЗ. 27 также непосредственного поступают на вход микропроцессора ВМ ВСПВ 38.
АМПППВП для алгоритмической компенсации кинематических искажений воздушного потока, набегающего на АМПППВП от вращательного движения вертолета, и динамических искажений индуктивного воздушного потока со скоростью Vind, распределенной неравномерно по радиусу НВ, имеет высокочастотный электрический разъем для непрерывного информационного обмена с вычислительным модулем ВМ ВСПВ и МПВС 40.
БЦВУК 39 по цифровому МКИО, например спецификации ARINC 429 непрерывно выдает в ECDS информацию о величинах:
 – вектора истинной скорости результирующего воздушного потока, набегающего на фюзеляж вертолета в скоростной СК;
– вектора истинной скорости результирующего воздушного потока, набегающего на фюзеляж вертолета в скоростной СК;
Vп – приборной скорости полета вертолета;
Р0 – статического давления воздушной среды, окружающей вертолет, у подстилающей поверхности, при маневрировании вертолета на подстилающей поверхности;
РН – статического давления воздушной среды, окружающей вертолет, на высоте полета;
t0 – температуры окружающей вертолет воздушной среды у подстилающей поверхности, в °С;
tН – температуры окружающей среды на высоте полета, в °С;
Нбар – барометрической высоты полета вертолета (абсолютной и относительной);
Vв – вертикальной скорости полета вертолета – градиенте изменения высоты полета в метрах за 1 с;
β – измеряемой величине угла скольжения вертолета.
Кроме того электронный модуль АМПППВП непрерывно выдает:
- разовые команды об отказах датчиков первичной информации, линий связи, электронных компонентов, вычислителя – РК «отказ»;
- разовые команды об обледенении АМПППВП - РК «обледенение», «включи обогрев АМПППВП в ручной режим». Вышеприведенный перечень параметрической информации непрерывно поступает на входы ВМ ВСПВ и МПВС 40 БЦВУК 39, причем на другие входы ВМ ВСПВ 40 БЦВУК 39 от различных систем ИКБОВ по высокоскоростным помехозащищенным информационно-вычислительным каналам, например, спецификации ARINC 664 (AFDX), непрерывно поступает следующая параметрическая информация о величинах:
- компонентов вектора абсолютной угловой скорости вертолета относительно связанных осей 
- компонентов вектора путевой скорости  в нормальной Гринвичской географической навигационной системе координат ONEH;
в нормальной Гринвичской географической навигационной системе координат ONEH;
- компонентов вектора перегрузки по связанным осям вертолета  ;
;
- текущего веса вертолета Gmeк;
- частоты вращения НВ nНВ;
- истинной геометрической высоты полета вертолета Нист;
- углах крена γ, тангажа ϑ и курса ψ;
- частоты вращения несущего винта nНВ и информации о темпе его изменения  , углах установки лопастей несущего винта ϕ НВ и о темпе перемещения ручки «ШАГ-ГАЗ»
, углах установки лопастей несущего винта ϕ НВ и о темпе перемещения ручки «ШАГ-ГАЗ»  .
.
Выходом ВМ ВСПВ и МПВС 40 БЦВУК 39 является следующая параметрическая информация:
 − компоненты вектора истинной воздушной скорости невозмущенного воздушного потока, набегающего на вертолет в ССК OXYZ ;
− компоненты вектора истинной воздушной скорости невозмущенного воздушного потока, набегающего на вертолет в ССК OXYZ ;
 − компоненты вектора истинной воздушной скорости индуктивного воздушного потока, образованного работающим НВ в ССК;
− компоненты вектора истинной воздушной скорости индуктивного воздушного потока, образованного работающим НВ в ССК;
 − компоненты вектора истинной воздушной скорости результирующего воздушного потока, набегающего на фюзеляж вертолета в ССК;
− компоненты вектора истинной воздушной скорости результирующего воздушного потока, набегающего на фюзеляж вертолета в ССК;
 − компоненты вектора истинной воздушной скорости в Гринвичской географической навигационной системе координат (географическом трехграннике ONEH);
− компоненты вектора истинной воздушной скорости в Гринвичской географической навигационной системе координат (географическом трехграннике ONEH);
 − компоненты вектора истинной воздушной скорости в подвижной НЗСК, связанной с вертолетом ОXgYgZg;
− компоненты вектора истинной воздушной скорости в подвижной НЗСК, связанной с вертолетом ОXgYgZg;
 − компоненты вектора возмущенной истинной воздушной скорости в ССК;
− компоненты вектора возмущенной истинной воздушной скорости в ССК;
 − компоненты вектора путевой скорости в подвижной НЗСК, связанной с вертолетом;
− компоненты вектора путевой скорости в подвижной НЗСК, связанной с вертолетом;
Vu − скалярная величина истинной воздушной скорости вертолета;
Vп − скалярная величина приборной воздушной скорости вертолета;
Vв − скалярная величина вертикальной скорости полета - градиент изменения высоты полета в метрах за 1 с;
 − компоненты вектора скорости ветра в Гринвичской географической системе координат (географическом трехграннике ONEH);
− компоненты вектора скорости ветра в Гринвичской географической системе координат (географическом трехграннике ONEH);
 − компоненты вектора скорости ветра в подвижной НЗСК, связанной с вертолетом;
− компоненты вектора скорости ветра в подвижной НЗСК, связанной с вертолетом;
 − компоненты вектора скорости ветра в ССК;
− компоненты вектора скорости ветра в ССК;
U и δ − скорость и направление метеорологического ветра;
Нбар − барометрическая высота полета вертолета (абсолютная и относительная);
Нбез = f (Нрел..;λ;ϕ) − потребная безопасная высота полета, предупреждающая экипаж о возможности столкновения вертолета с рельефом подстилающей поверхности и искусственными препятствиями на ней (цифровая карта местности);
α − расчетная величина угла атаки НВ (планера);
β − измеряемая величина угла скольжения вертолета;
Рст − величина статического давления воздушной среды, окружающей вертолет;
t0 − температура окружающей вертолет воздушной среды на подстилающей поверхности при его стоянке или перемещении в °С;
tH − температура окружающей среды на высоте полета в °С;
 − расчетная величина максимально допустимого взлетного/посадочного веса вертолета в зависимости от способов взлета/посадки, МПВС, используемых правил полетов, видов выполняемых работ, которая определяется в соответствии с методологией, приведенной в РЛЭ типа вертолета;
− расчетная величина максимально допустимого взлетного/посадочного веса вертолета в зависимости от способов взлета/посадки, МПВС, используемых правил полетов, видов выполняемых работ, которая определяется в соответствии с методологией, приведенной в РЛЭ типа вертолета;
 − фактическая величина текущего веса вертолета.
− фактическая величина текущего веса вертолета.
Вышеприведенная параметрическая информация в зависимости от этапов и режимов полета вертолета визуализируется с использованием когнитивной графики и отображается на улучшенной кабиной дисплейной системе (ECDS) вертолета, предназначенной для обеспечения экипажей вертолетов достоверной информацией о барометрической высоте полета, приборной и истинной воздушной скорости полета, величине и составляющих вектора скорости ветра в ССК и НЗСК, а также о направлении ветра относительно Северного направления меридиана, информацией о маневренных возможностях вертолета в зоне влияния ветра, величине атмосферного давления и температуры воздушной среды, окружающей вертолет в полете.
Кроме того, ВМ ВСПВ и МПВС 40 БЦВУК 39 формирует когнитивную интеллектуальную сигнальную информацию на ECDS по предупреждению АПиСИ, связанных с ошибками экипажа в технике пилотирования, отказами AT, а также неблагоприятным влиянием ВВФ, обеспечивает экипаж упреждающей когнитивной сигнальной информацией о прогнозировании возникновения крайне опасных режимов полетов: СЛВ, ВК, явлений «подхвата» и «штопора», выхода на границы максимально/ минимально допустимой приборной скорости, предупреждает о возможности столкновения вертолета с рельефом подстилающей поверхности и искусственными препятствиями, используя цифровую карту рельефа подстилающей поверхности и базу знаний потребных безопасных высот полета в зависимости от характеристик рельефа и используемых правил полетов (ПВП, ППП, ОПВП и др.), а также обеспечивает предупреждениями об опасной скорости снижения, опасной скорости сближения с подстилающей поверхностью, полете ниже потребной безопасной высоты полета, обеспечивает экипаж возможностью уверенно поддерживать пилотажные параметры в эксплуатационных границах при любых сочетаниях приборной скорости Vn, вертикальной скорости Vв, барометрической высоты полета Нбар в условиях воздействия ветра (вертикальной, продольной, боковой составляющих), любых сочетаний атмосферного давления и температуры воздушной среды, существенно повышает уровень ситуационной осведомленности экипажа в понимании возникающих ошибок в технике пилотирования, связанных с нестандартными действиями и/или несвоевременно и неправильно принятыми экипажем решениями, предупреждает АПиСИ, связанные с ошибочным определением экипажем максимально допустимых взлетных/посадочных весов вертолета для конкретных сложившихся метеорологических условий внешней окружающей вертолет среды, используемых экипажем правил полетов и способов взлета/посадки, обеспечивает информацией об использовании средств ПОС, ПЗУ.
Для решения вышеприведенных задач БЦВУК 39 содержит обширные базы данных ЛТХ вертолета, его летные эксплуатационные ограничения по всем параметрам, библиотеку данных по статическим и динамическим упреждениям для срабатывания АПСИ, базу знаний высококвалифицированных экспертов в области летной и технической эксплуатации вертолетов причин ошибок экипажа из-за нестандартных действий, отказов подсистем общевертолетного оборудования (ОВО) и ИКБОВ, базы знаний возникновения опасных режимов полета, характерных для вертолетов, из-за неблагоприятного сочетания пилотажных параметров с параметрами ВВФ, которые создают условия для существенного повышения ситуационной осведомленности экипажа по ВСПВ и МПВС, за счет внедрения когнитивной визуально-речевой системы интеллектуальной информационной поддержки экипажа.
Электронный блок ВМ ВСПВ 38 АМПППВП контролирует включение и отключение, и отказ обогрева АМПППВП. Обогрев АМПППВП может быть включен как в автоматический, так и в ручной режим работы.
Отличительной особенностью ВМ ВСПВ и МПВС 40 БЦВУК 39 является то, что он обеспечивает потребный уровень БП, регламентируемый Авиационными Правилами в частности (АП-29), и приемлемый уровень БП, регламентируемый общегосударственным показателем: относительным числом авиационных происшествий (АП) и инцидентов на 100 тыс. часов полетного времени, с учетом рекомендаций ИКАО, в соответствии с которыми ни один район полетов ИКАО не должен иметь уровень частоты авиационных происшествий более чем вдвое превышающий общемировой показатель на основе скользящего среднего за пять лет, причем ВМ ВСПВ и МПВС 40 БЦВУК 39 является техническим средством, выполняющим функции интеллектуальной информационно-управляющей системы вертолета по ВСПВ и МПВС своевременно и правильно предупреждает экипаж о приближении параметрической информации ПИiВСПВиМПВС к границе эксплуатационных режимов, определяет текущий уровень БП: УУП, СС, АС, КС, прогнозирует изменения уровня БП, формирует визуально-речевые управляющие команды для корректировки алгоритмов штурвального и автоматического управления для локализации возникающей нештатной ситуации, формирует простой и интуитивно-понятный интерфейс экипажу, воспринимаемый экипажем с первого взгляда .
Краткое описание алгоритма определения высотно-скоростных параметров и параметров воздушной среды, окружающей вертолет
Работа АМПППВП характеризуется двумя различными режимами. При малых поступательных скоростях полета вертолета менее 50÷70 км/ч, на взлетно-посадочных режимах, режимах висения и маневрирования вертолета на малых высотах планер вертолета и установленные на нем АМПППВП находятся в зоне влияния индуктивного воздушного потока, образованного вращающимся НВ − Vind , возмущенного воздушного потока, набегающего на планер вертолета, кинематически искаженного воздушного потока при вращательных движениях вертолета с угловыми скоростями − ωх; ωy; ωz.
В этом случае воспринимаемая АМПППВП аэрометрическая информация неоднозначно определяет ВСПВ, т.к. воздушный поток, набегающий на АМПППВП, имеет результирующую истинную воздушную скорость  , образованную геометрической суммой векторов скоростей воздушного потока: вектора воздушной скорости, обусловленной поступательным/вращательным/криволинейным движением вертолета в воздушном пространстве − вектором невозмущенной истинной воздушной скорости вертолета
, образованную геометрической суммой векторов скоростей воздушного потока: вектора воздушной скорости, обусловленной поступательным/вращательным/криволинейным движением вертолета в воздушном пространстве − вектором невозмущенной истинной воздушной скорости вертолета  в ССК, вектором скорости ветра в НЗСК
в ССК, вектором скорости ветра в НЗСК  , вектором индуктивной воздушной скорости, образованной работающим НВ в ССК
, вектором индуктивной воздушной скорости, образованной работающим НВ в ССК  , вектором кинематических искажений воздушного потока, набегающего на вертолет, обусловленных вращательными движениями вертолета. Для высокоточного определения ВСПВ и МПВС возникает необходимость определения величины невозмущенной истинной воздушной скорости путем алгоритмической компенсации индуктивной составляющей скорости воздушного потока, величин кинематических искажений воздушного потока, и привести все векторы, входящие в уравнение определения величины невозмущенной истинной воздушной скорости в единую систему координат. Величина невозмущенной истинной воздушной скорости определяется из векторного уравнения:
, вектором кинематических искажений воздушного потока, набегающего на вертолет, обусловленных вращательными движениями вертолета. Для высокоточного определения ВСПВ и МПВС возникает необходимость определения величины невозмущенной истинной воздушной скорости путем алгоритмической компенсации индуктивной составляющей скорости воздушного потока, величин кинематических искажений воздушного потока, и привести все векторы, входящие в уравнение определения величины невозмущенной истинной воздушной скорости в единую систему координат. Величина невозмущенной истинной воздушной скорости определяется из векторного уравнения:
 =
= −
−  −
−  −
− , где (5)
, где (5)
− вектор истинной воздушной скорости невозмущенного воздушного потока;
− вектор истинной скорости возмущенного результирующего воздушного потока, набегающего на вертолет;
− вектор истинной скорости индуктивного воздушного потока;
− вектор кинематических искажений набегающего на вертолет воздушного потока;
− вектор скорости ветра.
Для определения компонентов вектора скорости невозмущенного воздушного потока используется вектор скорости результирующего воздушного потока , который вычисляется на основе данных АМПППВП.
Величины и плотности воздушного потока ρΣ определяются по воспринимаемым АМПППВП значениям полного давления результирующего набегающего воздушного потока РпΣ , статического давления результирующего набегающего воздушного потока РстΣ , температуры заторможенного результирующего набегающего воздушного потока TTΣ по стандартным зависимостям, приведенным в источниках информации [ГОСТ 5212-74. Таблица аэродинамическая. Динамические давления и температура торможения воздуха для скорости от 10 до 4000 км/ч. Параметры М.: Из-во стандартов, 1974 239 с] и [ГОСТ 4701-81. Атмосфера стандартная. Параметры. М.: Издательство стандартов. 1981 179 с].
В соответствии с приведенным источником информации модуль вектора скорости суммарного воздушного потока =+ +будет определяться из выражения (6):
 (6)
(6)
где ТТ∑ − в градусах Кельвина; Vи∑ − в км/ч.
Плотность воздуха определяется в соответствии с выражением (7):
 , где (7)
, где (7)
 в кг/м3;
в кг/м3;
Рст − в мм.рт.ст.;
ТТ∑ − температура заторможенного результирующего набегающего воздушного потока в градусах Кельвина.
Параметры, входящие в вышеприведенные формулы, имеют размерность в СИ. Экипажами вертолетов при выполнении полетов компоненты вектора ветра  используются в НЗСК и географическом трехграннике ONEH, тогда для определения компонентов вектора скорости ветра в НЗСК и Гринвичской географической навигационной системе координат параметры вектора
используются в НЗСК и географическом трехграннике ONEH, тогда для определения компонентов вектора скорости ветра в НЗСК и Гринвичской географической навигационной системе координат параметры вектора  перепроектируются из ССК в НЗСК путем решения матричного уравнения вида:
перепроектируются из ССК в НЗСК путем решения матричного уравнения вида:
 (8)
(8)
по известным компонентам пространственного положения γ, ϑ, ψ, направляющим косинусам углов между осями трехгранников OXgYgZg и OXYZ .
Компоненты вектора в связанной системе координат (ССК) определяются следующим образом:
 (9)
(9)
где  − углы, определяющие пространственное положение вектора истинной скорости результирующего воздушного потока относительно оси приемника полных давлений 26 Р∑i , по измеренным величинам давлений Р i1, Р i2 и Р i3, Pi4 приемниками полных давлений, которые размещены в полусферической части 24 АМПППВП.
− углы, определяющие пространственное положение вектора истинной скорости результирующего воздушного потока относительно оси приемника полных давлений 26 Р∑i , по измеренным величинам давлений Р i1, Р i2 и Р i3, Pi4 приемниками полных давлений, которые размещены в полусферической части 24 АМПППВП.
В соответствии с источником информации [Петунии А.Н. «Методы и техника измерений параметров газового потока. Из-во Машиностроение. Москва, 1972 г. с.331] далее приводятся зависимости распределения давлений на полусферической поверхности АМПППВП для определения скоса суммарного воздушного потока :
 (10)
(10)
Откуда углы ϕ1 и ϕ2 , определяющие пространственное положение вектора , рассчитываются в соответствии выражениями:
 (11)
(11)
Для определения параметров вектора  компенсируются его искажения при вращении вертолета относительно центра масс с угловыми скоростями ωx; ωy; ωz, поскольку АМПППВП размещается на фюзеляже вертолета на радиусе-векторе
компенсируются его искажения при вращении вертолета относительно центра масс с угловыми скоростями ωx; ωy; ωz, поскольку АМПППВП размещается на фюзеляже вертолета на радиусе-векторе  от центра масс вертолета.
от центра масс вертолета.
Так как АМПППВП, а значит и датчики полного давления Рп статического давления Рст , температуры заторможенного воздуха ТТ находятся на планере вертолета на радиусе векторе относительно центра масс в месте наименьших пульсаций статического давления из-за маховых движений лопастей НВ, определяемых по результатам летных испытаний типа вертолета, то при наличии информации о векторе абсолютной угловой скорости  относительно центра масс, будут иметь место и кинематические искажения векторов
относительно центра масс, будут иметь место и кинематические искажения векторов  которые определяются вычислителем ВСПВ и МПВС 40 решением векторного уравнения (12), приведенного в источнике [СЮ. Есаулов, О.П. Баков, И.С. Дмитриев «Вертолет как объект управления». М. Москва., издательство «Машиностроение», 1977 г. ]:
которые определяются вычислителем ВСПВ и МПВС 40 решением векторного уравнения (12), приведенного в источнике [СЮ. Есаулов, О.П. Баков, И.С. Дмитриев «Вертолет как объект управления». М. Москва., издательство «Машиностроение», 1977 г. ]:
 (12)
(12)
 − вектор кинематически искаженного воздушного потока истинной воздушной скорости вертолета.
− вектор кинематически искаженного воздушного потока истинной воздушной скорости вертолета.
Уравнение (12) в проекциях на оси ССК имеют следующий вид:
 , где (13)
, где (13)
i, j, к — единичные орты векторов.
Из решений матричного уравнения (13) следует, что в ССК компоненты вектора кинематически искаженной истинной скорости набегающего на планер вертолета потока воздуха, определяются по выражениям:

 (14)
(14)
Аэродинамическое искажение первичной аэрометрической информации значительно зависит от режимов и параметров полета, от скорости движения вертолета относительно окружающего воздушного пространства, от режимов работы НВ и его технических характеристик.
Аэрометрическая информация, регистрируемая приемными устройствами восприятия полных давлений и датчиками первичной информации, которые уставлены в полусферической части АМПППВП, позволяет определить параметры индуктивного воздушного потока НВ в области малых приборных скоростей вертолета, на взлетных/посадочных режимах, режимах висения и маневрирования на малых скоростях полета вертолета.
Полусферические приемники воздушных давлений 26 АМПППВП воспринимают полные давления Р1i; Р2i, и Р3i; Р4i, и Рп∑i, и определяют угловое положение вектора результирующего набегающего на АМПППВП воздушного потока.
При этом на стоянке вертолета с запущенными двигателями и раскрученной трансмиссией величина результирующей воздушной скорости определяется в соответствии с выражением 15:
= +
+  (15)
(15)
Для конкретного места установки АМПППВП на планере вертолета компоненты вектора индуктивной скорости:  определяются уравнениями вида:
определяются уравнениями вида:
 , где (16)
, где (16)
 − величина индуктивной скорости на режиме висения вертолета.
− величина индуктивной скорости на режиме висения вертолета.
 (17) Тогда:
(17) Тогда:
 (18)
(18)
KindХ ; KindZ; KindZ − безразмерные коэффициенты, зависящие от модуля вектора скорости  невозмущенного воздушного потока, а также углов атаки а и скольжения β вертолета, величин отклонений ручки циклического шага (РЦШ) и δ γ ; δ ϑ ручки общего шага НВ ϕНВ которые определяются при летных испытаниях системы определения ВСПВ и МПВС для конкретного типа вертолета и становятся априорно известными.
невозмущенного воздушного потока, а также углов атаки а и скольжения β вертолета, величин отклонений ручки циклического шага (РЦШ) и δ γ ; δ ϑ ручки общего шага НВ ϕНВ которые определяются при летных испытаниях системы определения ВСПВ и МПВС для конкретного типа вертолета и становятся априорно известными.
В выражении (17) приняты следующие обозначения:
G − текущий вес вертолета;
 - нормальная перегрузка;
- нормальная перегрузка;
ρ Н − плотность невозмущенного воздушного потока на высоте полета Н;
F − площадь, ометаемая НВ;
g =9,806 м/с2 − ускорение свободного падения;
χ − коэффициент заполнения диска НВ;
 − модуль вектора
− модуль вектора  на режиме висения вертолета, когда величина вектора путевой скорости W=0.
на режиме висения вертолета, когда величина вектора путевой скорости W=0.
Для определения ВСПВ и МПВС заявляемые способ и устройство позволяют определить параметры невозмущенного воздушного потока в ССК в соответствии с выражениями:
 (19)
(19)
где  - составляющие невозмущенной истинной воздушной скорости в ССК вертолета, которые получены путем алгоритмической компенсации кинематических и аэродинамических искажений воздушного потока, набегающего на вертолет, его вращательными движениями с учетом влияния индуктивного воздушного потока от НВ.
- составляющие невозмущенной истинной воздушной скорости в ССК вертолета, которые получены путем алгоритмической компенсации кинематических и аэродинамических искажений воздушного потока, набегающего на вертолет, его вращательными движениями с учетом влияния индуктивного воздушного потока от НВ.
Кроме того, ВСПВ определяются из выражений приведенных ниже:
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
 (24)
(24)
 (25)
(25)
 (26)
(26)  , (27)
, (27)
- α и β - угол атаки и скольжения вертолета;
- РН - атмосферное давление на высоте полета;
- tН - температура окружающей среды на высоте полета;
ρ- Н - плотность воздуха на высоте полета;
- Vп - приборная скорость вертолета;
- Нбар - барометрическая высота полета вертолета;
-Р0= 101325 Па - абсолютное давление воздуха на уровне моря;
- t0 = 288,15 К - температура воздуха на уровне моря;
- R и K - удельная газовая постоянная и показатель адиабаты для воздуха: R =287,05287 (Дж/кг К), К =1,4;
τ- = 0,0065 K/м - температурный градиент атмосферы.
Для определения компонентов вектора скорости ветра, необходимые экипажу для пилотажных целей на этапах до запуска двигателей и раскрутки трансмиссии, с раскрученной трансмиссией, руления, маневрирования по подстилающей поверхности, взлетно-посадочных этапах полета, висения, торможения поступательной скорости, маневрирования над подстилающей поверхностью с малыми воздушными скоростями, выполнения строительно-монтажных работ, поисково-спасательных работ и др., а также обеспечения высокоточной воздушной навигации в заявляемой группе изобретений ВМ ВСПВ и МПВС 40 использует дополнительную информацию о векторе путевой скорости  в НЗСК, полученную путем перепроектирования вектора путевой скорости
в НЗСК, полученную путем перепроектирования вектора путевой скорости  [WN;WE;WН] из Гринвичской географической навигационной системы координат в НЗСК с применением матрицы направляющих косинусов, приведенных в ГОСТ 20058-80, что позволяет определить параметры вектора скорости ветра
[WN;WE;WН] из Гринвичской географической навигационной системы координат в НЗСК с применением матрицы направляющих косинусов, приведенных в ГОСТ 20058-80, что позволяет определить параметры вектора скорости ветра  в НЗСК путем решения векторных уравнений приведенных ниже:
в НЗСК путем решения векторных уравнений приведенных ниже:
 (28)
(28)
Известно, что компоненты вектора путевой скорости вырабатываются Бортовой инерциальной навигационной системой (платформенной или бесплатформенной - БИНС) или Бортовой спутниковой навигационной системой в виде вектора путевой скорости с восточной, северной и высотной компонентами [WN;WE;WН] в Гринвичской географической навигационной системе координат. Для определения компонентов вектора скорости ветра в подвижной НЗСК вектор путевой скорости перепроектируется в НЗСК, движущейся вместе с вертолетом в зависимости от величины текущего истинного/магнитного курса Ψи/Ψм . При этом компоненты вектора путевой скорости вертолета в НЗСК движущейся с вертолетом определяются из уравнений:
 (29)
(29)
В выражении (29) для продольной скорости перемещения вертолета относительно подстилающей поверхности WХg знак «+» используется при перемещении вертолета вперед, знак «минус» при перемещении вертолета относительно подстилающей поверхности назад.
Для поперечной скорости перемещения вертолета относительно подстилающей поверхности WZg знак «+» используется при перемещении вертолета вправо, «минус» при перемещении вертолета относительно подстилающей поверхности влево.
Компоненты вектора путевой скорости в подвижной НЗСК используется экипажем для балансировки вертолета на этапах вертикального набора высоты/снижения и приземления, в том числе и в условиях воздействия на вертолет ветра и в снежном/пыльном вихре, что позволяет обеспечить безопасное маневрирование вертолета на этапе висения и обеспечить безопасное приземление в случае потери экипажем визуальной видимости ориентиров на подстилающей поверхности.
Вектор невозмущенной истинной воздушной скорости  перепроектируются из ССК в НЗСК в соответствии с матричным уравнением , приведенным ниже:
перепроектируются из ССК в НЗСК в соответствии с матричным уравнением , приведенным ниже:
 (30)
(30)
по известным углам крена γ, тангажа ϑ, курса ψ, с использованием направляющих косинусов углов между осями трехгранников OXgYgZg и OXYZ .
Направляющие косинусы между осями трехгранников OXgYgZg и OXYZ определяются в соответствии с нижеприведенной таблицей.
Решение матричного уравнения (30) относительно компонентов вектора невозмущенной истинной воздушной скорости в НЗСК приводится ниже в виде системы уравнений (31):
VuXg∞= VuX∞ cosϑ cosψ+VuY∞ (sinγ sinϑ - sinϑ cosγ cosψ)+VuZ∞ (cosγ sinψ+ sinγ sinϑ cosψ);
VuYg∞= VuX∞ sinϑ +VuY∞ cosϑ cosγ - VuZ∞ cosϑ sinγ ; (31)
VuZg∞= -VuX∞ cosϑ sinψ+VuY∞ (sinγ cosψ + sinϑ cosγ sinψ)+VuZ∞ (cosγ cosψ - sinϑ sinγ sinψ).
В проекциях на подвижную НЗСК, перемещающуюся вместе с вертолетом, в зависимости от истинного ψи , магнитного ψм курса компоненты вектора скорости ветра на взлетно-посадочных этапах полета определяются из выражений:
 (32)
(32)
 (33)
(33)
Или окончательно на взлетно-посадочных режимах полета вертолета компоненты вектора скорости ветра определяются в соответствии с уравнениями (34):
uXg = uX =WXg - [VuX∞ ⋅ cosϑ cosψ + VuY∞ ⋅ (sinγ sinϑ - sinϑ cosγ cosψ +
+ VuZ∞ ⋅(cosγ sinψ + sinγ sinϑ cosψ)];
uYg = uY =WYg - [VuX∞ ⋅ sinϑ + VuY∞ ⋅ cosϑ cosγ - VuZ∞ ⋅cosϑ sinγ ]; (34)
uZg = uZ=WZg - [-VuX∞ ⋅ cosϑ sinψ + VuY∞ ⋅ (sinγ cosψ + sinϑ cosγ sinψ )+
+ VuZ∞ ⋅(cosγ cosψ - sinϑ sinγ sinψ)].
Уравнения системы (34) содержат в своем составе компоненты вектора невозмущенной истинной воздушной скорости, вычисленные в ССК с помощью измерения полных давлений результирующего воздушного потока PпΣ, результирующего статического давления РстΣ результирующей температуры заторможенного потока воздуха TTΣ , перепадов полных давлений результирующего воздушного потока в приемных устройствах Рi1 - Рi2 ; Рi3 - Рi4 , а также вычисленные с помощью величины истинной скорости результирующего воздушного потока VиΣ , компонентов вектора индуктивной воздушной скорости и компонентов кинематических искажений истинной воздушной скорости при вращательном движении вертолета, параметры пространственного положения вертолета, величины угловых скоростей вращения вертолета.
На этапах стоянки вертолета до запуска двигателей и раскрутки трансмиссии ( = 0;
= 0;  = 0), углы крена и тангажа малы, модуль вектора скорости ветра в ССК определяется в соответствии с выражением:
= 0), углы крена и тангажа малы, модуль вектора скорости ветра в ССК определяется в соответствии с выражением:
 , где (35)
, где (35)
 , (36)
, (36)
ρН - плотность воздуха на высоте стоянки вертолета Н0;
РH и ТН - статическое давление и абсолютная температура в градусах Кельвина на
высоте стоянки вертолета Н0;
Р0= Рмса = 760 мм.рт.ст.= 101325 Па - статическое давление плотности воздуха на уровне моря;
Р0 = 1,225 кг/м3 - плотность воздуха на высоте Н = 0 (в соответствии с МСА);
Т0 = 288,15 °К - абсолютная температура воздуха на высоте Н=0 МСА.
Алгоритм определения направления ветра и его компонентов относительно продольной оси вертолета приводится ниже.
Определение компонентов вектора ветра на этапе стоянки с запущенными двигателями силовой установки и раскрученной трансмиссией
На стоянке с запущенными двигателями и раскрученной трансмиссией вектор скорости результирующего воздушного потока и вектор ветра определяются в соответствии с векторными уравнениями:
 (37)
(37)
Для восприятия информации о результирующем воздушном потоке - векторе скорости результирующего воздушного потока  на поверхности полусферической части АМПППВП располагаются приемные устройства 26 для торможения скорости результирующего воздушного потока РnΣ , а именно приемные устройства торможения Рi1 и Рi2 ; Рi3 и Рi4, по давлению которых вычисляются углы ϕ1 и ϕ2 определяющие пространственное положение вектора результирующей скорости воздушного потока
на поверхности полусферической части АМПППВП располагаются приемные устройства 26 для торможения скорости результирующего воздушного потока РnΣ , а именно приемные устройства торможения Рi1 и Рi2 ; Рi3 и Рi4, по давлению которых вычисляются углы ϕ1 и ϕ2 определяющие пространственное положение вектора результирующей скорости воздушного потока  относительно оси симметрии полусферического приемника в плоскости параллельной продольной оси вертолета и в плоскости ортогональной продольной оси вертолета, а величина статического давления PcmΣ результирующего воздушного потока определяется с помощью датчиков, расположенных в камере сглаженного статического давления АМПППВП 4.
относительно оси симметрии полусферического приемника в плоскости параллельной продольной оси вертолета и в плоскости ортогональной продольной оси вертолета, а величина статического давления PcmΣ результирующего воздушного потока определяется с помощью датчиков, расположенных в камере сглаженного статического давления АМПППВП 4.
Углы ϕ1 и ϕ2 определяются в соответствии выражением (12), приведенным в источнике информации [Петунии А.Н. «Методы и техника измерений параметров газового потока. Из-во Машиностроение. Москва, 1972 г. с.331].
Компоненты вектора результирующей истинной воздушной скорости в ССК определяются в соответствии с системой уравнений (38):
 (38)
(38)
Тогда компоненты вектора скорости ветра на этапах стоянки с запущенными двигателями СУ и вращающимся НВ определяются в ССК системой уравнений (39):
 (39)
(39)
При этом, большой необходимости перепроектировать вектор скорости ветра из ССК в НЗСК нет из-за того, что углы крена γ, тангажа ϑ на стоянке являются малыми величинами, а косинусы малых углов примерно равны единице.
Горизонтальная составляющая скорости ветра определяется из выражения:
 . (40)
. (40)
Угол ветра УВ - угол между продольной осью вертолета и направлением (откуда дует ветер) вектора скорости ветра определяется из уравнения (41):
УВ = arctg  . (41)
. (41)
При этом, если угол ветра УВ = 0° ÷ 90°, то вектор скорости ветра имеет встречную составляющую ив и боковую составляющую в правый борт иб.пр., если угол ветра УВ = 90° ÷ 180° , то вектор ветра имеет боковую составляющую в правый борт иб.пр., и попутную составляющую ип, если угол ветра УВ = 180° ÷ 270°, то вектор ветра имеет боковую составляющую в левый борт иб.л и попутную составляющую ип , угол ветра УВ = 270° ÷ 360°, то вектор ветра имеет боковую составляющую в левый борт иб.л и встречную составляющую ив.
Направление вектора скорости ветра относительно северного меридиана определяется из уравнения:
δи /δм=Ψи/Ψм±УВ (42)
На этапах руления по подстилающей поверхности результирующая скорость воздушного потока определяется как:
 (43)
(43)
Компоненты вектора скорости ветра в ССК определяются системой уравнений:
 (44)
(44)
где Vu рул..X ; Vu рул..Y ; Vu рул..Z −компоненты вектора истинной воздушной скорости руления в ССК, определяются по выражениям (45, 46):
 (45)
(45)
 (46)
(46)
Заявляемые способ и устройство для определения ВСПВ и МПВС отличаются от аналогов и прототипов тем, что для определения режима работы
АМПППВП по приему аэрометрической информации в полете в зависимости от приборной скорости полета вертолета вычислитель заявляемого устройства формирует показатель режима полета вертолета в соответствии с выражением (47):
 , где (47)
, где (47)
Vп - приборная скорость набегающего воздушного потока;
Θg - угол атаки основания конуса НВ, определяемый как угол скоса вихревой колоны относительно вертикальной оси вращения НВ;
R - радиус лопасти НВ вертолета.
В соответствии с источником информации: [Браверман А.С. Вайнтруб А.П. Динамика вертолета. Предельные режимы полета. - М.: Машиностроение,1988.- 280 с.; ил.]:
 (48)
(48)
 (49)
(49)
μ - безразмерная характеристика режима работы НВ;
λ0 - средний по диску коэффициент протекания воздушного потока.
В соответствии с вышеприведенным источником информации при полете вертолета на малых скоростях, когда μ = 0,05 ÷ 0,07, планер вертолета находится в створе вихревой колоны НВ под влиянием индуктивного воздушного потока НВ, а параметры аэродинамического поля полностью зависят от величины индуктивного воздушного потока Vind, при этом ВСПВ находятся под влиянием Vind. Эти обстоятельства вызывают необходимость определения и измерения параметров составляющих вектора индуктивной скорости воздушного потока НВ  в ССК и параметров вектора ветра в ССК. Для этих целей в заявляемом АМПППВП используются миниатюрные приемники полных давлений результирующего воздушного потока 26, размещенные в полусферической части АМПППВП, и приемники полных давлений 20, размещенные в верхней цилиндрической части 18 профилированной поверхности 17 АМПППВП, которые позволяют измерить входящие в нижеприведенную формулу (50) скорости воздушных потоков с использованием способа, устанавливающего связь параметров воздушной среды, окружающей вертолет, с параметрами движения вертолета путем математических выражений, связывающих между собой разные виды давления и температуры с высотой и скоростью полета вертолета:
в ССК и параметров вектора ветра в ССК. Для этих целей в заявляемом АМПППВП используются миниатюрные приемники полных давлений результирующего воздушного потока 26, размещенные в полусферической части АМПППВП, и приемники полных давлений 20, размещенные в верхней цилиндрической части 18 профилированной поверхности 17 АМПППВП, которые позволяют измерить входящие в нижеприведенную формулу (50) скорости воздушных потоков с использованием способа, устанавливающего связь параметров воздушной среды, окружающей вертолет, с параметрами движения вертолета путем математических выражений, связывающих между собой разные виды давления и температуры с высотой и скоростью полета вертолета:
 (50)
(50)
При полете вертолета с Vп ≈ 0 и μ = 0,05 ÷ 0,07 АМПППВП подвергается воздействию индуктивного воздушного потока  с пульсацией воспринимаемых давлений, частота и величина которых определяется частотой вращения НВ nНВ и углом установки лопастей НВ ϕНВ.
с пульсацией воспринимаемых давлений, частота и величина которых определяется частотой вращения НВ nНВ и углом установки лопастей НВ ϕНВ.
При поперечных перемещениях вертолета значительно искажается величина Рст. Для минимизации искажений величины Рст на режимах μ = 0,05 ÷ 0,07 в заявляемом устройстве АМПППВП применяется способ сглаживания (демпфирования) в камере сглаживания пульсирующих давлений 4, связанной с атмосферным давлением окружающей среды, в которой происходит постепенное торможение результирующей пульсирующей скорости воздушного потока и сглаживание Рст .
При μ = 0,1÷0,2 аэродинамическое возмущение воздушных потоков, воспринимаемое АМПППВП от индуктивного воздушного потока , образованного вращением НВ, и кинематически искаженного воздушного потока истинной воздушной скорости  , несколько снижается.
, несколько снижается.
Процедура комплексирования компонентов вектора истинной воздушной скорости  в НЗСК, полученных путем перепроектирования компонентов вектора истинной воздушной скорости
в НЗСК, полученных путем перепроектирования компонентов вектора истинной воздушной скорости  из скоростной в связанную систему координат, и использование компонентов вектора путевой скорости:
из скоростной в связанную систему координат, и использование компонентов вектора путевой скорости:  в НЗСК, полученных путем перепроектирования вектора путевой скорости
в НЗСК, полученных путем перепроектирования вектора путевой скорости  из Гринвичской географической навигационной системы координат в НЗСК с применением матрицы направляющих косинусов, приведенных в ГОСТ 20058-80, позволяет определить параметры вектора скорости ветра в НЗСК
из Гринвичской географической навигационной системы координат в НЗСК с применением матрицы направляющих косинусов, приведенных в ГОСТ 20058-80, позволяет определить параметры вектора скорости ветра в НЗСК  путем решения векторных уравнений, приведенных ниже:
путем решения векторных уравнений, приведенных ниже:
 (51)
(51)
На этапах взлета/посадки условия восприятия ВСПВ сильно усложнены, т.к.  существенно увеличивается, а
существенно увеличивается, а  . Определить параметры вектора ветра
. Определить параметры вектора ветра  , а также Vи; Vп ≈ 0 , на этих этапах сложно.
, а также Vи; Vп ≈ 0 , на этих этапах сложно.
Однако АМПППВП дополнительно отличается от аналогов и прототипов тем, что позволяет определить параметры ВСПВ и МПВС на всех этапах и режимах полета.
Аэродинамическое взаимодействие НВ и планера оказывают существенное влияние на распределение РпΣ пульсирующего в зонах установки АМПППВП. В соответствии с проведенными исследованиями разработчиками вертолетов, например, для одновинтовых вертолетов, наименьшее влияние пульсации РпΣ. и Рст оказывается на поверхности фюзеляжа вертолета в интервале X/L=0,23 ÷ 0,35 или  .
.
Для конкретного места установки АМПППВП на планере вертолета используется информация о распределении давления суммарного воздушного потока по длине фюзеляжа, изменяющегося во времени в зависимости от режимов работы НВ. Наиболее предпочтительным местом установки АМПППВП является надвтулочное пространство вертолета, а с точки зрения зоны наименьшего влияния пульсирующих давлений на точность измерения статического давления в АМПППВП, связанных с частотой вращения НВ и количеством его лопастей, является надфюзеляжное пространство, определяемое соотношением следующего вида:
X/L=0,23 ÷ 0,35 ,где (52)
X - абсцисса ССК;
L - длина фюзеляжа,
или  от оси OX в ССК.
от оси OX в ССК.
С точки зрения обеспечения точности определения компонентов вектора скорости ветра при маневрировании вертолета на малых и предельно малых высотах возникает необходимость установки двух комплектов АМПППВП на пилонах в районе кабины экипажа симметрично относительно продольной оси вертолета с целью исключения влияния затенения АМПППВП элементами конструкции фюзеляжа вертолета.
При  начинают работать приемники воздушного давления: 20 Р1÷Р6, воспринимающие полное давление Рп набегающего на планер вертолета воздушного потока
начинают работать приемники воздушного давления: 20 Р1÷Р6, воспринимающие полное давление Рп набегающего на планер вертолета воздушного потока  путем полного его торможения в приемниках Р1÷Р6, расположенных в азимутальной плоскости относительно продольной оси вертолета под углами 60°, которые и определяют скорость и угол скольжения воздушного потока, а на стоянке до запуска двигателей скорость и направление ветра.
путем полного его торможения в приемниках Р1÷Р6, расположенных в азимутальной плоскости относительно продольной оси вертолета под углами 60°, которые и определяют скорость и угол скольжения воздушного потока, а на стоянке до запуска двигателей скорость и направление ветра.
В заявляемом техническом устройстве ВСПВ и МПВС пульсации полного давления, измеряемые ДАД , зависящие от количества лопастей NЛ и угловой скорости вращения НВ ωНВ, могут быть отфильтрованы с использованием аппаратных и программных низкочастотных фильтров.
Работа АМПППВП дополнительно отличается тем, что повышается надежность измерения необходимых величин за счет применения однотипных микромеханических датчиков абсолютного давления ДАД, систематические и случайные инструментальные погрешности которых алгоритмически компенсируются в вычислителе ВСПВ 38 с использованием их математических моделей. Алгоритм компенсации инструментальных погрешностей, позволяющей расширить функциональные возможности АМПППВП, приводится ниже.
Для определения ВСПВ и МПВС заявляемые способ и устройство позволяют исключить (скомпенсировать) параметры кинематических и динамических искажений истинной воздушной скорости набегающего на планер вертолета воздушного потока, в результате чего в расчетах ВСПВ и МПВС используются параметры невозмущенного воздушного потока.
Аэрометрическая информация, регистрируемая приемными устройствами восприятия полных давлений и датчиками первичной информации, которые уставлены в полусферической части АМПППВП, позволяет определить параметры индуктивного воздушного потока НВ в области малых приборных скоростей вертолета, на взлетных/посадочных режимах, режимах висения и маневрирования на малых скоростях полета вертолета.
Полусферические приемники воздушных давлений 26 АМПППВП воспринимают полные давления Рi1 и Рi2 ; Рi3 и Рi4, и РnΣ и определяют угловое положение вектора результирующего набегающего на АМПППВП воздушного потока.
Известно, что в соответствии с Наставлением по метеорологическому обеспечению полетов Гражданской авиации (НМО-ГА-95) ветер определяется как воздушный поток, перемещающийся относительно подстилающей поверхности Земли и его направлении определяется относительно Северного направления истинного (магнитного) меридиана, причем вектор ветра по отношению к ВС имеет продольную (встречную/попутную) и боковую (в левый/правый борт) составляющие в зависимости от величины истинного/магнитного курса ψи/ψм самолета/вертолета и которые в соответствии с требованиями РЛЭ типа ВС имеют летные эксплуатационные ограничения.
Для определения фактических компонентов вектора скорости ветра в НЗСК на режимах стоянки вертолета до запуска двигателей и раскрутки трансмиссии, стоянки с раскрученной трансмиссией, руления и/или маневрирования на подстилающей поверхности, висения, взлетно-посадочных режимах полета, маневрирования на малых и предельно малых высотах с целью предупреждения потери устойчивости и управляемости вертолета, предупреждения попадания в режим CJIB, опрокидываний, перехлеста лопастей НВ у вертолетов с соосными винтами, ударов лопастей НВ о хвостовую балку одновинтовых вертолетов, экипаж вертолета обеспечивается непрерывной когнитивной визуальной информацией о фактических компонентах вектора скорости ветра в НЗСК, а также информацией о допустимых в летной эксплуатации компонентах вектора скорости ветра на этапах до запуска двигателей, в процессе запуска двигателей и раскрутки трансмиссии, при работе двигателей и раскрученной трансмиссии на этапах руления маневрирования на подстилающей поверхности, взлетно-посадочных этапах, этапах маневрирования в воздушном пространстве на малых высотах при выполнении строительно-монтажных работ, выполнении аварийно-спасательных работ, а при выполнении полетов по маршрутам экипаж обеспечивается информацией о воздушной скорости полета, барометрической высоте полета, угле сноса, о скорости и направлении ветра, а также об их летных эксплуатационных ограничениях.
Для навигационных целей экипаж обеспечивается следующими компонентами вектора ветра:
- информацией о метеорологическом направлении ветра относительно Северного направления истинного/магнитного меридиана:
 (53)
(53)
 (54)
(54)
Причем величины We и WN определяются с помощью БИНС или приемных устройств спутниковой навигационной системы, а величины VE и VN с помощью матричного уравнения:
 , где (55)
, где (55)
 - матрица направляющих косинусов поворота от связанного трехгранника OXYZ к географическому трехграннику OENH.
- матрица направляющих косинусов поворота от связанного трехгранника OXYZ к географическому трехграннику OENH.
Направляющие косинусы между осями трехгранников OXYZ и OENH определяются в соответствии с таблицей, приведенной ниже.

Связь между элементами матрицы и значениями пилотажных параметров вертолета ψи, ϑ, γ определяется зависимостями:
 ; (56)
; (56)
 (57)
(57)
 . (58)
. (58)
В географическом трехграннике ONEH:
 (59)
(59)
 (60)
(60)
Кроме того, компоненты вектора ветра в НЗСК в полете могут быть получены из решения известного навигационного треугольника скоростей (НТС):
1. Угол ветра:
УВ = δ - ПУ, где (61)
δ - метеорологическое направление ветра;
ПУ - путевой угол.
2. Путевая скорость:
W=Vи ⋅cos (УС ) + U⋅ cos (УВ ), где (62)
УС − угол сноса, измеряемый доплеровскими измерителями путевой скорости и угла сноса или вычисляемый по известным величинам W, Vи , скорости и направления ветра U, δ .
3. Направление ветра:
 . (63)
. (63)
4. Горизонтальная составляющая скорости ветра:

uN = WN - VN; (64)
uЕ = WЕ - VЕ.
5. Углы атаки и скольжения:
 ; (65)
; (65)
 . (66)
. (66)
6. Компоненты вектора скорости ветра в НЗСК могут быть определены как:
 (67)
(67)
7. Угол сноса УС:
 (68)
(68)
8. Приборная скорость полета вертолета:
 или
или
 м/с =1225,057
м/с =1225,057 км/ч , (69)
км/ч , (69)
где  ; (70)
; (70)
g = ge (1+β⋅sin2ϕ), где (71)
- Рд - динамическое давление воздушного потока, набегающего на вертолет;
ρ- Н - плотность воздуха на высоте полета;
- Vп - приборная скорость вертолета;
- Р0 = 1013,25 Па (1013,25 м бар) = 760 мм.рт.ст. - абсолютное давление воздуха на уровне моря;
- t0 = 288,15 К - температура воздуха на уровне моря;
- R и k - удельная газовая постоянная и показатель адиабаты для воздуха R =287,05287 (Дж/кг К), k =1,41;
- Vи∞ - истинная скорость невозмущенного воздушного потока, набегающего на
вертолет;
- g - ускорение силы тяжести;
- gе - ускорение силы тяжести на экваторе;
- ϕ - географическая широта;
- β - коэффициент, равный β = 2,5· асф /gе - асф;
/gе - асф;
- асф - экваториальный радиус сфероида;
-  - угловая скорость вращения Земли.
- угловая скорость вращения Земли.
- τ =0,0065 к/м - температурный градиент атмосферы.
9. Температура торможения ТТ и ее связь с температурой наружного воздуха ТНВ:
 или
или  , где (72)
, где (72)
- М - число Маха.
 (73)
(73)
Кроме того, ВМ ВСПВ и МПВС БЦВУК 40 в случае отказа системы электрообогрева АМПППВП или закупорки приемных устройств полных давлений АМПППВП в условиях сильного обледенения или попадания в них механических примесей рассчитывает величину истинной воздушной скорости Vи по данным ДИСС или спутниковой навигационной системы, используя выражение (74):
 (74)
(74)
Из аэродинамики полетов самолетов/вертолетов известна математическая зависимость между величинами приборной скорости Vп и истинной воздушной скорости Vи, тогда ВМ ВСПВ и МПВС БЦВУК 40 обеспечивает экипаж информацией о величине приборной скорости даже при отказе АМПППВП.
В соответствии с вышеприведенными выражениями следует, что заявляемое устройство АМПППВП позволяет непосредственно измерять температуру и давление воздушной среды, окружающей вертолет, при стоянке и маневрировании вертолета на подстилающей поверхности и на высоте полета, температуру заторможенного результирующего воздушного потока, величину сглаженного статического давления, что существенно повышает точность измерения и вычисления ВСПВ и МПВС, а также позволяет правильно скорректировать фактические отклонения параметров температуры и давления от их стандартов, определенных параметрами MCA.
Кроме того, заявляемое техническое устройство позволяет оценить маневренные возможности вертолета в зоне воздействия ветра на всех этапах и режимах полета, при этом оценка возможности маневрирования вертолета в зависимости от скорости ветра U и его метеорологического направления δ осуществляется по выражениям, приведенным ниже:
 ; (75)
; (75)
 (76)
(76)
Тогда ВМ ВСПВ и МПВС 40 для пилотажных целей в любой момент времени и на любом этапе полета вертолета вычисляет фактические продольные (встречную и попутную), поперечные (в левый и правый борт) составляющие скорости ветра, что позволяет постоянно контролировать эксплуатационные ограничения вертолета по ветру и непрерывно оценивать маневренные возможности вертолета относительно ветра при его движении на любом курсе ψ и непрерывно обеспечивать экипаж интеллектуальной когнитивной изобразительностью параметрической и сигнальной информацией о фактическом воздействии ветра на вертолет:
 (77)
(77)
Отличительной особенностью обтекания воздушным потоком профиля АМПППВП является то, что профиль АМПППВП существенно изменяет величину вектора невозмущенной истинной скорости  по сечению в плоскости OXY АМПППВП, при этом градиент скорости по сечению в зоне расположения приемных устройств 20 P1 ÷ Р6 существенно возрастает за счет сужения воздушного потока криволинейным профилем второго порядка. Причем в этом случае сразу используется два аэродинамических базисных явления: эффект торможения и деформирования воздушного потока, когда
по сечению в плоскости OXY АМПППВП, при этом градиент скорости по сечению в зоне расположения приемных устройств 20 P1 ÷ Р6 существенно возрастает за счет сужения воздушного потока криволинейным профилем второго порядка. Причем в этом случае сразу используется два аэродинамических базисных явления: эффект торможения и деформирования воздушного потока, когда
 (78)
(78)
- K - безразмерный коэффициент, зависящий от габаритных размеров АМПППВП, чистоты механической обработки его поверхности и величины скорости , которые определяются при продувке АМПППВП в аэродинамической трубе и уточняется при летных испытаниях, а первоначально определяются путем моделирования с использованием программного продукта ANSYS.
Заявляемая конструкция АМПППВП позволяет повысить его чувствительность к скорости воздушного потока, расширить нижнюю границу воспринимаемой скорости воздушного потока что необходимо экипажу для информационного обеспечения о скорости ветра при стоянке вертолета на ВВПП с отключенными двигателями СУ и трансмиссией.
В настоящее время потребность отображения углов атаки и скольжения на вертолетных пилотажных дисплеях отсутствует, однако конструкция АМПППВП позволяет определить угол атаки расчетным путем, а величину угла скольжения измерить непосредственно, и в случае возникновения необходимости для непосредственного измерения угла атаки на криволинейной профилированной части АМПППВП могут быть установлены дополнительные приемные устройства полного давления, позволяющие непосредственно измерять углы атаки вертолета на всех этапах и режимах полета. Восприятие параметров набегающего воздушного потока, деформированного криволинейным профилем АМПППВП, осуществляется приемными устройствами с дренажными отверстиями для удаления влаги и механических примесей, содержащихся в воздушном потоке, которые имеют миниатюрную камеру полного торможения  и которые с помощью пневмопроводов связаны с ДАД, расположенными на плате датчиков электронного блока.
и которые с помощью пневмопроводов связаны с ДАД, расположенными на плате датчиков электронного блока.
Параметры воздушного потока Pn1 ÷ Р n6 при обдувке приемных устройств воздушным потоком, имеющим угол скоса β относительно продольной оси вертолета, образуют семейство угловых характеристик Pn1 ÷ Рn6 в зависимости от направления воздушного потока (при стоянке вертолета до запуска двигателей СУ - направление ветра). Эти угловые характеристики Pn1 ÷ Рn6 в функции от угла скоса Pn1÷6 = f(β) позволяют для приемников с номерами Рi-1, Рi+1 и Рi определить точку пересечения, угловые координаты которой совпадают с координатой максимума угловой характеристики приемника Рi.
Эти особенности угловых характеристик Pi = f(u,β), Pi = f(Vи∞ ,β), приемников многоканального приемника Pn1÷6 АМПППВП используются для обработки параметров Pn1÷6 с целью получения информации о величине и направлении вектора относительно продольной оси вертолета. Для этого используется связь между безразмерной величиной  и текущими значениями давлений Pi+1 и Pi соседних приемников полного давления с угловым положением вектора воздушной скорости вертолета.
и текущими значениями давлений Pi+1 и Pi соседних приемников полного давления с угловым положением вектора воздушной скорости вертолета.
В соответствии с непатентуемым источником информации [Солдаткин В.М. «Методы и средства измерения аэродинамических углов летательных аппаратов»/ Казань: Изд-во Казан.гос.техн.ун-та, 2001, 448с.] алгоритм обработки массива Pni , а именно сигналов ДАД 1÷6 , предусматривает ряд этапов:
1. Определение номера i-го приемного устройства, в котором величина Pi максимальна Pi = Pimax;
2. Далее по номеру такого приемного устройства определяется первое приближение угловой координаты вектора  в соответствии с выражением:
в соответствии с выражением:  . Поскольку АМПППВП устанавливается на фюзеляже вертолета так, чтобы ось первого приемного устройства Pni совпадала с продольной осью вертолета ОХ, то на следующем этапе:
. Поскольку АМПППВП устанавливается на фюзеляже вертолета так, чтобы ось первого приемного устройства Pni совпадала с продольной осью вертолета ОХ, то на следующем этапе:
3. Проводится оценка положения вектора относительно оси приемного устройства Pni путем проверки выполнения условий неравенств:
 или (79)
или (79)
 (80)
(80)
Откуда следует, что при выполнении условий (79) вектор находится слева от i-го приемника Рni , а вводимый параметр K для оценки углового положения вектора относительно i-го приемника принимает значение K = - 1.
Если выполняется условие (80), то вектор находится справа от i-го приемника Рni, а вводимый параметр K для оценки углового положения вектора относительно i-го приемника принимает значение K=+1.
4. Для определения угла скоса β результирующего воздушного потока или угла ветра УВ относительно продольной оси вертолета АМПППВП устанавливается в ССК, а приемник полного давления Р1 устанавливается вдоль связанной оси ОХ, а также используется безразмерная система координат, приведенная на стр. 96 источника информации [В.В. Солдаткин «Система воздушных сигналов вертолета». Монография. Казань.2012 г.], где безразмерная система координат представляет собой систему координат, абсциссой которой является безразмерная угловая координата Θ, а ординатой отношение  , тогда в соответствии с вышеприведенным источником информации:
, тогда в соответствии с вышеприведенным источником информации:
 (81)
(81)
 (82)
(82)
где
- Θ - угол между осями приемных устройств полного давления в АМПППВП;
- f (Θ) и f (-Θ) - полиномы степени п, вычисляемые по результатам предварительной градуировки АМПППВП и аппроксимации угловой характеристики i-го приемника Рni в диапазоне Θ = f (Θmin, Θmax) на основе сплайн-функции.
Выражение (81) используется при выполнении условия Рi-1 > Рi+1, а (82) при выполнении условия Рi-1 < Рi+1. Угловая координата βX вектора относительно оси ОХ ССК определяется выражением:
 , или (83)
, или (83)
 (84)
(84)
где t0 - шаг координатной сетки во вновь введенной системе координат  ;
;
ΘX =(Θmax - Θmin) - значение угловой координаты воздушной скорости.
После определения угла βX направления воздушного потока или  вычисляется значение давления Ртах, соответствующего модулю вектора или в соответствии с выражением:
вычисляется значение давления Ртах, соответствующего модулю вектора или в соответствии с выражением:
 (85)
(85)
Далее вычисляется модуль  , который определяется на основании предварительной градуировки АМПППВП по графикам изменения:
, который определяется на основании предварительной градуировки АМПППВП по графикам изменения: 
Профилирование поверхности АМПППВП по контуру «песочные часы» или по контуру «Вентури» позволяет не только повысить информативность , но и вписать в поверхность дополнительные приемные отверстия для определения угла атаки. Боковая и продольная составляющие скорости ветра на стоянке в состоянии покоя определяется из выражений:
 (86)
(86)
Заявляемые способ и устройство позволяют в автоматическом режиме определить расчетную величину максимально-допустимого взлетного/посадочного веса вертолета, исходя из конкретных условий взлета, полета по маршруту и посадки, используя для этих целей информацию, выработанную вычислителем ВСПВ и МПВС 40, а именно: информацию о барометрической высоте ВВПП, температуре наружного воздуха на подстилающей поверхности, величине атмосферного давления на подстилающей поверхности, скорости и направления ветра, курса взлета, а также исходных данных, необходимых для определения фактического взлетного веса вертолета. Заявляемые способ и устройство выдают экипажу предупреждающую информацию о взлете/посадке с максимально-допустимым взлетным весом, а в случае превышения фактического взлетного веса максимально допустимого значения вырабатывает предупреждающую экипаж информацию об опасности взлета/посадки с использованием когнитивной визуальной и речевой информации.
Алгоритм определения максимально-допустимого взлетного/посадочного веса вертолета реализуется в вычислительном модуле ВСПВ и МПВС 40 в соответствии с методологией, предусмотренной в Руководстве по летной эксплуатации типа вертолета (РЛЭ).
Другой отличительной особенностью заявленных способа интеллектуальной информационной поддержки экипажа вертолета по высотно-скоростным параметрам и параметрам воздушной среды, окружающей вертолет, устройства для его осуществления является то, что для повышения точности определения ВСПВ и МПВС используются алгоритмы компенсации систематических и случайных инструментальных погрешностей микромеханических датчиков первичной информации (ДПИ): ДАД и ДТ. При этом показания ДПИ, например ДАД можно представить в виде:
 , где (87)
, где (87)
 - показания прибора, измеряющего величину полного давления воздушного потока;
- показания прибора, измеряющего величину полного давления воздушного потока;
Рист - истинная величина измеряемого давления;
Р0 - величина смещения нуля;
КР - масштабный коэффициент.
Показания прибора может быть зафиксировано в виде напряжения, тока, частоты или иного электрического параметра, тогда показания прибора, например: в виде электрического напряжения может быть представлено в виде:
 (88)
(88)
С учетом присутствия в измерениях инструментальных погрешностей, имеющих как систематический характер, так и случайный характер, которые зависят в основном для датчиков давления и температуры от перепадов температуры среды, окружающей датчики, перепадов напряжения питания датчиков, нестабильности нулевого смещения в зависимости от времени работы в запуске и нестабильности от запуска к запуску, показания прибора, измеряющего давление можно представить в виде:
 (89)
(89)
 (90)
(90)
Кр,  - масштабный коэффициент и смещение нуля, соответствующие нормальной температуре окружающей среды при нормальных климатических условиях (НКУ) (tHB = +15°С ÷ 25°С);
- масштабный коэффициент и смещение нуля, соответствующие нормальной температуре окружающей среды при нормальных климатических условиях (НКУ) (tHB = +15°С ÷ 25°С);
UРnum - фактическое напряжение питания ДАД;
UДР - напряжение питания, соответствующее диапазону измерения;
 - коэффициент, характеризующий температурную чувствительность смещения нуля к температуре окружающей среды и напряжению питания;
- коэффициент, характеризующий температурную чувствительность смещения нуля к температуре окружающей среды и напряжению питания;
 - коэффициент, характеризующий чувствительность масштабных коэффициентов к температуре окружающей среды и напряжению питания;
- коэффициент, характеризующий чувствительность масштабных коэффициентов к температуре окружающей среды и напряжению питания;
δUР(τ)- шумовая составляющая сигнала;
Т°К - температура окружающей среды в градусах Кельвина К;
δ  - случайная погрешность смещения нуля.
- случайная погрешность смещения нуля.
Вычислитель ВСПВ и МПВС 38, используя выражение (90), непрерывно определяет истинные величины полного давления по показаниям ДАД. Аналогичным образом определяются истинные величины измеряемых температур по показаниям ДТ. Поскольку в устройстве АМПППВП используются однотипные микромеханические датчики абсолютного давления и температуры, то алгоритмическая компенсация их инструментальных погрешностей становится актуальной в части повышения точности и стабильности определения ВСПВ и МПВС.
С целью повышения точности определения ВСПВ и МПВС в вычислителе ВСПВ и МПВС 38 реализуется известный алгоритм сглаживания пульсаций показаний датчиков первичной информации от пика до пика методом скользящего среднего на интервале времени.
Заявляемые способ, устройство позволяют измерить и вычислить ВСПВ и МПВС и обеспечивают экипаж когнитивной интеллектуальной поддержкой по ВСПВ и МПВС, направленной на повышение ситуационной осведомленности экипажа для предупреждения АПиСИ, связанных с ошибочными действиями/бездействием экипаж, отказами АТ, неблагоприятным влияниями ВВФ, а также предупреждают попадания вертолета в неприемлемые опасные режимы полета: СЛВ, ВК, явлений «подхвата» и «штопора», выхода на границы максимальной/минимальной допустимых приборных скоростей, потерю устойчивости и управляемости вертолета из-за опасного воздействия боковой и попутной составляющих скорости ветра, предупреждают взлеты/посадки с превышениями максимально-допустимых взлетных/посадочных весов, а также предупреждают снижения вертолета ниже минимально-допустимых высот полета, снижения с опасной вертикальной скоростью и опасные сближения с рельефом подстилающей поверхности и искусственными препятствиями на нем.
Таким образом, заявляемые способ и устройство для его осуществления решают важнейшую задачу повышения уровня БП вертолетов, обеспечивают экипаж полным набором инструментов по ВСПВ, МПВС, когнитивной изобразительностью параметрической и сигнальной информации ВСПВ и МПВС, которые существенно повышают ситуационную осведомленность экипажа вертолета о внутрикабинной и закабинной полетной обстановке, обеспечивают ранние предупреждения экипажа вертолета о возможности возникновении в полете неприемлемых для летной эксплуатации условий, характерных для вертолетов, а значит, направлены на повышение уровня БП и обеспечения его приемлемого уровня в соответствии с потребностями применения вертолетов в Гражданской и Государственной Авиации.
Заявляемая группа изобретений, а именно: способ и устройство для его осуществления, объединяются одним общим изобретательским замыслом, направленным на повышение потребного авиационными правилами и приемлемого уровня БП вертолетов, регламентируемого требованиями ИКАО и государством-эксплуатантом вертолетов, причем заявляемая группа изобретений обеспечивает синергетический эффект в области предупреждения АПиСИ, связанных с ошибочными действиями/бездействием экипажа в технике пилотирования, отказами АТ и неблагоприятными воздействиями ВВФ на полеты вертолетов.
Промышленная применимость
Заявляемая группа изобретений предназначена для использования в авиационной промышленности при проектировании и изготовлении новых типов вертолетов, в том числе высокоскоростных вертолетов, предназначенных для эксплуатации в Государственной и Гражданской авиации Российской Федерации, а также может использоваться при модернизации вертолетов в условиях авиаремонтных заводов.
Технические средства и обеспечивающее их работу программное обеспечение, применение которых предусмотрено группой изобретений, могут быть разработаны в конструкторском бюро авиационного приборостроения, при этом может использоваться типовое стандартное промышленное оборудование, известные материалы, радиоэлектронные компоненты и комплектующие изделия отечественного производства, выполненные в соответствии с требованиями следующих нормативных документов: «Авиационных правил часть 29. Нормы летной годности винтокрылых аппаратов транспортной категории», «Квалификационных требований КТ-160Е. Условия эксплуатации и окружающей среды для бортового авиационного оборудования (внешние воздействующие факторы − ВВФ). Требования, нормы и методы испытаний», «Квалификационных требований КТ 178В. Требования к программному обеспечению бортовой аппаратуры и систем при сертификации авиационной техники», «Руководства по гарантии конструирования бортовой электронной аппаратуры КТ-254», «Квалификационных требований КТ-315. Минимальные стандарты характеристик авиационных систем (MASPS) для систем технического зрения с расширенными возможностями визуализации, систем искусственного зрения, комбинированных систем искусственного зрения и бортовых систем технического зрения с расширенными возможностями визуализации» в соответствии с архитектурой построения современных ИКБОВ, с использованием принципов построения интегральной модульной авионики (ИМА), предусматривающей использование высокотехнологичного оборудования и высокоскоростных линий передачи данных, а также качественных изменений интерфейса экипажа в обеспечении улучшения показателей БП вертолетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНЫЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ | 2019 |
|
RU2729891C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |
| БОРТОВАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА | 2010 |
|
RU2439584C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОЗДУШНОГО ПОТОКА | 2009 |
|
RU2426133C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
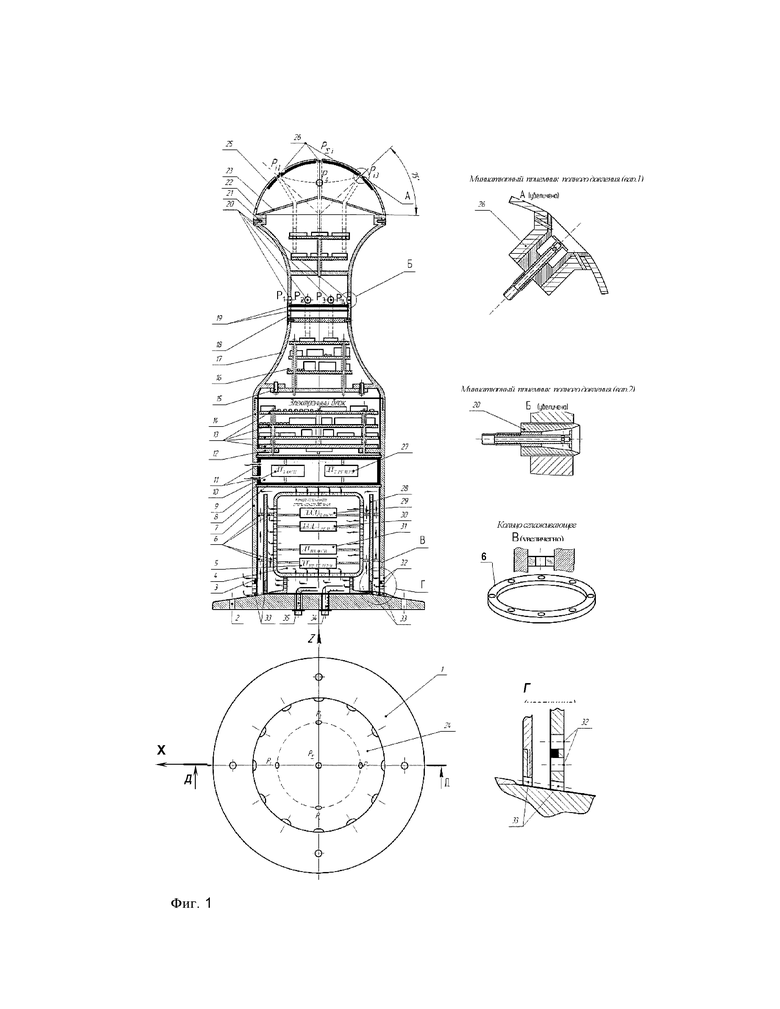

Группа изобретение относится к способу и устройству определения высотно-скоростных параметров вертолета (ВСПВ) и метеорологических параметров воздушной среды, окружающей вертолет (МПВС). Для реализации способа формируют аэрометрическую информацию набегающих, образованных пропульсивными силами вертолета воздушных потоков, а также ветра, обеспечивают интеллектуальную информационную поддержку экипажа по ВСПВ и МПВС для всех этапов и режимов летной эксплуатации вертолета определенным образом, обеспечивая экипаж необходимой информацией. Устройство содержит неподвижный осесимметричный многоканальный аэрометрический приемник полных давлений набегающего потока, пневмоэлектрические преобразователи, мультиплексор, аналого-цифровой преобразователь, микропроцессор, соединенные определенным образом. Обеспечивается раннее предупреждение экипажа вертолета о недопустимых параметрах полета и возможных нежелательных ситуациях. 2 н. и 8 з.п. ф-лы, 2 ил., 2 табл.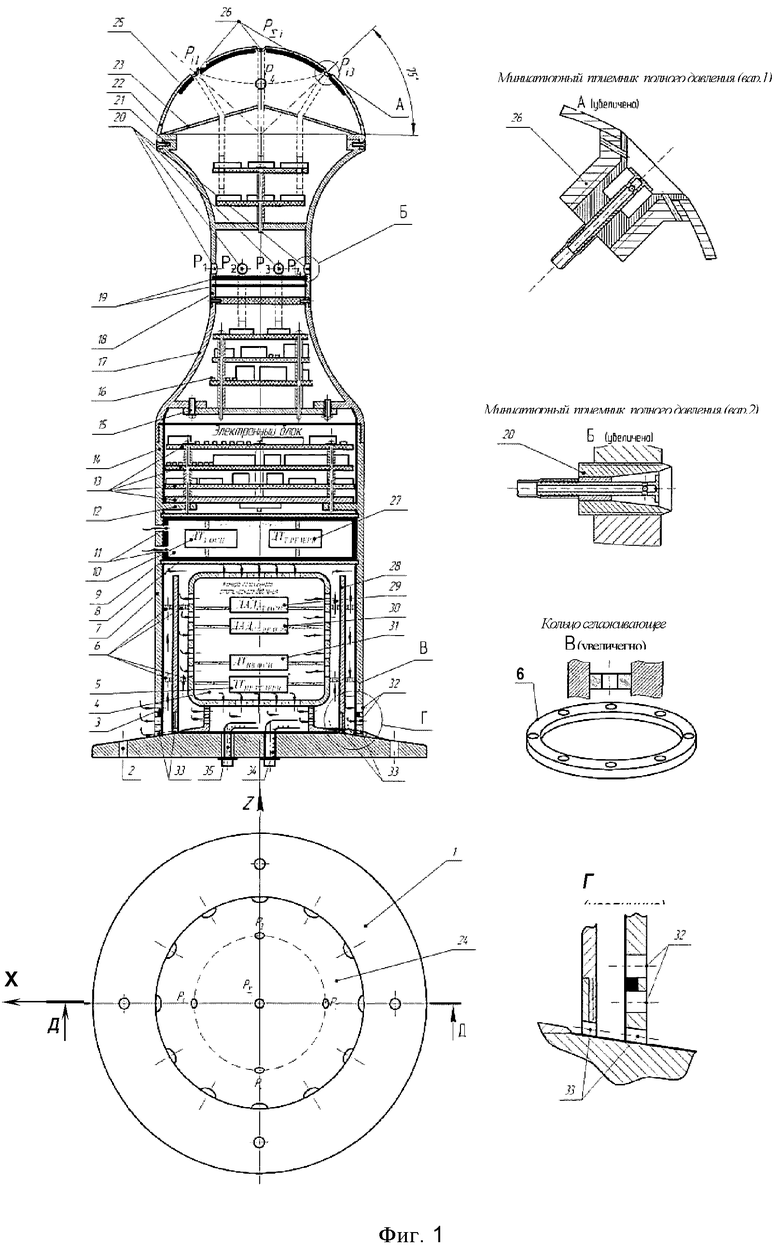
1. Способ определения высотно-скоростных параметров вертолета (ВСПВ) и метеорологических параметров воздушной среды, окружающей вертолет (МПВС), на всех этапах и режимах его полета, в том числе в диапазоне малых, околонулевых воздушных скоростей полета вертолета, использующий для этих целей аэрометрическую информацию, формируемую набегающим на него результирующим воздушным потоком, образованным пропульсивными силами вертолета, индуктивным воздушным потоком, образованным вращающимися лопастями несущего винта (НВ) и переносом воздушных масс относительно подстилающей поверхности Земли - ветром, использующий для измерения, вычисления ВСПВ и МПВС математическую зависимость аэрометрических параметров подвижных воздушных потоков, окружающих вертолет, а именно: разных видов давлений, температуры, плотности воздуха, окружающего вертолет, в зависимости от высоты и воздушной скорости движения вертолета в околоземном воздушном пространстве, отличающийся тем, что способ дополнительно включает интеллектуальную информационную поддержку экипажа по ВСПВ и МПВС для всех этапов и режимов летной эксплуатации вертолета, обеспечивает определение компонентов вектора скорости ветра в нормальной подвижной земной системе координат (НЗСК) в зависимости от величины курса вертолета (истинного, магнитного), обеспечивает экипаж информацией о температуре и величине давления у подстилающей поверхности и на высоте полета, информацией о максимально-допустимой взлетной/посадочной массе в зависимости от сложившихся условий в моменты взлета/посадки (метеорологических условий, технического состояния вертолетных взлетно-посадочных площадок, используемых правил полетов), обеспечивает экипаж когнитивной интеллектуальной визуально-речевой упреждающей информацией о ВСПВ и МПВС и об отклонениях их величин нормируемых значений, а также обеспечивает экипаж ранними предупреждениями о возможности возникновения в полете неприемлемых условий для летной эксплуатации вертолетов, а именно: «самопроизвольного левого вращения» (СЛВ), «вихревого кольца» (ВК), явлений «подхвата» и «штопора», выхода ВСПВ и МПВС на/за границы максимально/минимально допустимых в летной эксплуатации параметров для конкретного типа вертолета, ранними предупреждениями о возможности столкновения вертолета с рельефом подстилающей поверхности и искусственными препятствиями на ней, ранними предупреждениями об опасной скорости сближения с подстилающей поверхностью, полете ниже потребной безопасной высоты полета, ранними предупреждениями об опасном воздействии на вертолет компонентов вектора скорости ветра.
2. Способ по п. 1, отличающийся тем, что он обеспечивает своевременное формирование когнитивной интеллектуальной упреждающей интегральной визуально-речевой сигнальной информации (КИВРСИ) с выработкой команд-подсказок по управляющим действиям экипажа, направленных на изменения режима полета, траектории полета с целью локализации возникающих в полете нештатных ситуаций и раннего предупреждения АПиСИ путем идентификации возникающей особой ситуации, кроме того, способ обеспечивает оперативный доступ экипажа к интегральным визуально-речевым подсказкам, предназначенным для своевременной и безопасной локализации (блокирования) и ликвидации последствий возникшей проблемы, связанной неблагоприятными сочетаниями величин относительных отклонений ВСПВ и МПВС от их нормированных эксплуатационных значений, регламентируемых требованиями руководства по летной эксплуатации типа вертолета (РЛЭ) и инструкцией по технической эксплуатации, ошибками экипажа в технике пилотирования и отказами авиационной техники (АТ), а также способ направлен на обеспечение приемлемого уровня БП вертолетов в нормальных эксплуатационных условиях полета и при возникновениях в полете усложненных условий в полете (УУП), сложных ситуаций (СС), аварийных ситуаций (АС), катастрофических ситуаций (КС) с целью недопущения перехода УУП и СС в АС и КС.
3. Способ по п. 1, отличающийся тем, что он реализуется с использованием неподвижного аэрометрического многоканального панорамного приемника параметров подвижного/неподвижного воздушного потока (АМПППВП), используемого для измерения и вычисления параметров кинематически искаженного воздушного потока при вращательных движениях, перемещениях вертолета вперед-назад, влево-вправо, вверх-вниз и динамически искаженного воздушного потока, образованного вращающимися лопастями НВ и рулевого винта (РВ) - индуктивным воздушным потоком, а также способ реализуется вычислением модуля вектора результирующей истинной воздушной скорости VиΣ и его компонентов в ССК, в подвижной НЗСК на основе измерений величин полных давлений результирующего воздушного потока РnΣ, температуры заторможенного результирующего воздушного потока ТТΣ, величины сглаженного статического давления результирующего воздушного потока РстΣ, величин полного давления на подстилающей поверхности P0 и на высоте полета РН, температур наружного воздуха у подстилающей поверхности t0 и на высоте полета вертолета tН, вычислениями компонентов вектора истинной воздушной скорости индуктивного воздушного потока в ССК вертолета, образованного вращающимися лопастями НВ, сглаживанием пульсирующего полного давления результирующего воздушного потока, образованного маховыми движениями лопастей НВ, а также использованием базы знаний определения ВСПВ и МПВС с помощью аэрометрических измерителей и преобразователей первичной информации, использованием базы знаний высококвалифицированных авиационных экспертов в области летной и технической эксплуатации вертолетов, определяющих влияния величин отклонений текущих значений параметров ВСПВ и МПВС от их нормируемых Руководствами по летной и технической эксплуатации типа вертолета значений, создающих в полете особые ситуации (ОС), уровень опасности которых регламентируется авиационными правилами, например «Авиационными правилами часть 29. Нормы летной годности винтокрылых аппаратов транспортной категории».
4. Способ по п. 3, отличающийся тем, что в нем для сглаживания пульсаций полного давления воздушного потока, образованного маховыми движениями лопастей НВ, используется метод демпфирования пульсаций в высококачественной камере сглаживания со степенью сглаживания пульсаций

соответствующей атмосферной турбулентности воздушной среды, окружающей вертолет.
5. Способ по п. 3, отличающийся тем, что он для высокоточного определения ВСПВ и МПВС использует алгоритмическую компенсацию кинематических и аэродинамических искажений параметров результирующего воздушного потока, образованных вращательными движениями вертолета и индуктивным воздушным потоком, созданным вращающимися лопастями НВ, а также использует алгоритмическую компенсацию систематических и случайных инструментальных погрешностей и параметров нестабильности аэрометрических измерителей первичной информации, реализованных на микромеханических датчиках абсолютного давления (ДАД) и температуры воздушного потока (ДТ), и одновременно использует три аэродинамических эффекта: аэродинамический эффект преобразования кинетической энергии движущегося воздушного потока в потенциальную путем полного торможения результирующей скорости воздушного потока в приемных устройствах полного давления АМПППВП и в камере торможения возмущенной результирующей скорости набегающего воздушного потока в АМПППВП, эффект аэродинамического деформирования результирующего воздушного потока, набегающего на криволинейную поверхность второго порядка типа «песочные часы» неподвижного осесимметричного тела вращения - с множеством приемных устройств полных давлений результирующего воздушного потока, набегающего на АМПППВП, установленного на поверхности фюзеляжа в зоне влияния индуктивного воздушного потока, образованного вращающимися лопастями НВ, для увеличения динамического давления в зоне приема полных давлений набегающего воздушного потока на малых скоростях полета вертолета и на этапах стоянки вертолета на вертолетных взлетно-посадочных площадках (ВВПП) до запуска двигателей и раскрутки трансмиссии, маневрирования на подстилающей поверхности и взлетно-посадочных режимах для определения скорости и направления ветра, кроме того, используется аэродинамический эффект сглаживания полного давления пульсирующего воздушного потока, образованного маховыми движениями лопастей НВ, с целью повышения точности измерения статического давления окружающей вертолет воздушной среды.
6. Способ по п. 3, отличающийся тем, что он определяет компоненты вектора невозмущенной истинной воздушной скорости вертолета в скоростной системе координат, в ССК, НЗСК, Гринвичской географической навигационной системе координат, кроме того, используя методы комплексной обработки разнородной информации, а именно ВСПВ, инерциальной навигационной информации о векторе путевой скорости, параметрах пространственного положения вертолета, параметрах вектора управления вертолетом, компонентов вектора перегрузок, компонентов вектора абсолютной угловой скорости вращения вертолета, определяет компоненты вектора ветра в ССК, НЗСК и Гринвичской географической навигационной системе координат, обеспечивает экипаж вертолета когнитивной визуально-речевой информацией о продольном (встречном и попутном), поперечном (боковом в левый или правый борт) компонентах вектора скорости ветра, необходимых экипажу для обеспечения безопасного пилотирования вертолета на этапах стоянки вертолета перед запуском двигателей и раскрутки трансмиссии и маневрирования вертолета по подстилающей поверхности с раскрученной трансмиссией, взлетно-посадочных режимах полета, висения, торможения поступательной скорости, перемещения на малых приборных скоростях относительно подстилающей поверхности, при выполнении строительно-монтажных и аварийно-спасательных работ, причем способ автоматически определяет безопасную по курсу зону маневрирования вертолета в условиях воздействия на вертолет ветра.
7. Способ по п. 6, отличающийся тем, что он повышает уровень ситуационной осведомленности экипажа в понимании возникающих ошибок в технике пилотирования, опасного воздействия ВВФ на полет вертолета и отказов АТ, а также способ обеспечивает экипаж интеллектуальной когнитивной сигнальной информацией о боковой и продольной составляющих скорости ветра, для обеспечения необходимого запаса путевой, поперечной, продольной устойчивости и управляемости вертолета на взлетно-посадочных режимах полета, маневрирования на малых высотах, боевого применения, выполнения полетов на необорудованные и неуправляемые ВВПП, особенно с предельным взлетным/посадочным весом и в условиях высоких температур, низких давлений и опасного воздействия ветра.
8. Способ по п. 6, отличающийся тем, что он определяет малые приборные скорости полета вертолета на взлетно-посадочных режимах полета, этапах затормаживания, маневрирования вертолета над подстилающей поверхностью, а также определяет скорость ветра и его встречную/попутную, боковую составляющие в левый и правый борт, определяет безопасные зоны маневрирования вертолета по курсу относительно направления ветра, предупреждает опрокидывания вертолета при маневрировании на подстилающей поверхности, непрерывно контролирует положение вертолета на глиссаде снижения при заходе на посадку, в том числе и при заходе на посадку на необорудованные и неуправляемые ВВПП, обеспечивает непрерывный контроль предупреждения попадания вертолета в неприемлемые режимы полета ВК, СЛВ, «подхвата», «штопора» и взлетов/посадок с превышениями максимально-допустимых взлетных/посадочных весов/масс, выхода ВСПВ на/за границы максимально/минимально допустимых воздушных приборных скоростей, ранними предупреждениями о возможности столкновения вертолета с рельефом подстилающей поверхности, а также ранними предупреждениями об опасной скорости сближения с подстилающей поверхностью, полете ниже потребной безопасной высоты полета, ранними предупреждениями об опасном воздействии на вертолет компонентов вектора ветра и о возможности потери управляемости вертолетом с использованием когнитивной интеллектуальной изобразительности параметрической и сигнальной информации по ВСПВ и МПВС в сочетании с текстовыми сообщениями, отображаемыми на улучшенной кабиной дисплейной системе вертолета, и использованием речевой информации.
9. Устройство определения высотно-скоростных параметров вертолета (ВСПВ) и метеорологических параметров воздушной среды, окружающей вертолет (МПВС), предназначенное для определения параметров подвижного/неподвижного воздушного потока, набегающего на вертолет, в том числе и в диапазоне малых околонулевых скоростей полета вертолета по аэрометрической информации, формируемой набегающим на него воздушным потоком, образованным пропульсивными силами вертолета и вихревой колонной НВ, представляющее собой неподвижный осесимметричный многоканальный аэрометрический приемник, содержащий аэрометрические каналы восприятия полных давлений результирующего воздушного потока, набегающего на вертолет в вертикальной и горизонтальной плоскостях симметрии вертолета, содержащий разнесенные по высоте экранирующие диски, между которыми в азимутальной плоскости под одинаковыми углами расположены трубки приема полного давления воздушного потока, а на внутренних проточных профилированных поверхностях экранирующих дисков расположены отверстия, являющиеся приемниками дросселированного статического давления, при этом трубки полного давления и приемники дросселированного статического давления подключаются к входам пневмоэлектрических преобразователей, выходы которых через последовательно соединенные мультиплексор и аналогово-цифровой преобразователь подключаются к микропроцессору, выход которого является выходом системы по ВСПВ и компонентов вектора скорости ветра в ССК на этапах запуска двигателей силовой установки и раскрутки трансмиссии, руления по подстилающей поверхности и на взлетно-посадочных режимах полета, отличающееся тем, что устройство является автономным законченным техническим устройством, предназначенным для реализации интеллектуального способа информационной поддержки экипажа вертолета по ВСПВ и МПВС, и представляет собой осесимметричное тело вращения, содержащее в своем составе верхнюю полусферическую поверхность с приемными устройствами полных давлений воздушного потока, набегающего на вертолет путем торможения истинной воздушной скорости результирующего воздушного потока, с приемными устройствами полных давлений результирующего воздушного потока PiΣ и его компонентов относительно продольной оси вертолета: Рi1 и Рi2, относительно поперечной оси вертолета Рi3 и Рi4, причем приемные устройства полных давлений результирующей истинной скорости воздушного потока РnΣ; Рi1 и Рi2, Рi3 и Рi4 оборудованы электронагревательной протевообледенительной системой и системой дренажа для удаления влаги и механических примесей, содержащихся в атмосферном воздухе, при этом выходы приемных устройств полных давлений короткими пневмопроводами соединяются с входами микромеханических датчиков полных давлений, которые размещены на печатных платах внутри полусферической части АМПППВП и которые содержат элементы сервисной электроники для обеспечения электрического питания датчиков и преобразования показаний датчиков в цифровые коды, а также электрического питания электронагревателей приемных устройств, кроме того, АМПППВП в нижней части содержит цилиндрическую поверхность, внутри которой содержится камера сглаживания (демпфирования) пульсирующего статического давления с основными и резервными микромеханическими датчиками статического давления и температуры воздушной среды, окружающей вертолет, а также камера полного торможения скорости результирующего воздушного потока, в которой размещены основной и резервный микромеханические датчики полного давления и температуры результирующего заторможенного воздушного потока, причем датчики температуры и давления в этих камерах теплоизолированы от стенок камер, при этом верхняя полусферическая часть и нижняя цилиндрическая часть соединяются между собой профилированной поверхностью второго порядка, в середине которой содержится цилиндрическая поверхность, а для высокоскоростного вертолета многогранная призма с приемными устройствами полного торможения истинной скорости результирующего воздушного потока с приемниками полных давлений Р1; Р2; Р3; Р4; Р5; Р6, расположенных в азимутальной плоскости ОХZ ССК под одинаковыми углами 60° друг к другу, при этом цифровые выходы датчиков давления, температуры торможения, температуры наружного воздуха, сглаженного статического давления соединяются с входом вычислителя ВСПВ, а все компоненты АМПППВП, в том числе и вычислитель ВСПВ, размещаются в одном специально разработанном, хорошо обтекаемом воздушными потоками осесимметричном теле вращения, причем АМПППВП является устройством для измерения и вычисления ВСПВ и электрически связан с интегрированным комплексом бортового оборудования вертолета (ИКБОВ) шиной информационного обмена, имеет электрический разъем для обеспечения электрическим питанием и электрообогревом приемных устройств АМПППВП, кроме того, АМПППВП содержит электронный измерительно-вычислительный модуль (ЭИВМ) с электронными компонентами, а именно: верхнюю и нижнюю печатные платы с микромеханическими датчиками полных (абсолютных) давлений результирующего воздушного потока (ДАД) и его температуры (ДТ) с электронными компонентами сервисной электроники, обеспечивающими электрическое питание ДАД и ДТ, обогрев приемных устройств полных давлений, модуль преобразования аналоговых и дискретных сигналов датчиков первичной информации в цифровые коды (МПАиДС), модуль связи и сопряжения (МСС) выходов ДАД и ДТ с вычислителем ВСПВ, решающим задачи вычисления ВСПВ и алгоритмической компенсации инструментальных погрешностей датчиков первичной информации - датчиков полного давления, статического давления и температуры результирующего воздушного потока, набегающего на АМПППВП, а также модуль связи и сопряжения с вычислительным модулем ВСПВ и МПВС бортового цифрового вычислительно- управляющего комплекса вертолета (ВМ ВСПВ и МПВС БЦВУК), выход которого по высокоскоростным помехозащищенным цифровым линиям связи, например мультиплексному каналу информационного обмена (МКИО) спецификации ARINC 818, связан с входами улучшенной кабинной дисплейной системы экипажа, а именно: с входами когнитивного комплексного пилотажного дисплея (КПД), пилотажного дисплея на фоне лобового стекла (ПДЛС), многофункционального дисплея (МФД), комплексного дисплея навигационной обстановки (КДНО), которые обеспечивают экипаж интеллектуальной когнитивной изобразительностью параметрической и сигнальной информацией по ВСПВ и МПВС, кроме того, в систему внутренней связи экипажа выводятся речевая информация и речевые команды-подсказки, предназначенные для когнитивной интеллектуальной информационной поддержки экипажа и обеспечения приемлемого уровня БП вертолетов.
10. Устройство по п. 9, отличающееся тем, что для обеспечения экипажа когнитивной интеллектуальной информационной поддержкой ВМ ВСПВ и МПВС БЦВУК содержат множество баз данных: летно-технических характеристик (JITX) типа вертолета, летных эксплуатационных ограничений типа вертолета по ВСПВ и МПВС, пилотажных и технических параметров, библиотеку данных безразмерных нормируемых коэффициентов безопасности полетов, характеризующих относительные величины отклонений ВСПВ и МПВС от их номинальных эксплуатационных значений, создающих в полете особые ситуации (ОС), уровень опасности которых определяют высококвалифицированные авиационные эксперты в области летной и технической эксплуатации вертолетов, кроме того, содержит базу знаний обобщенных критериев параметров полета вертолета, вызывающих возникновения опасных режимов для типа вертолета: CJIB, ВК, явлений «подхвата» и «штопора», выхода вертолета на границы максимально/минимально допустимых приборных скоростей, базу знаний для предупреждения потери устойчивости и управляемости вертолета из-за опасного воздействия боковой и попутной составляющих скорости ветра и предупреждения взлета/посадки с превышениями максимально-допустимых взлетных/посадочных весов, а также предупреждения снижения вертолета ниже минимально-допустимых безопасных высот полета, предупреждения снижения с опасной вертикальной скоростью и опасного сближения с рельефом подстилающей поверхности.
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

