Изобретение относится к области авиационной техники и может быть использовано преимущественно на вертолетах, выполняющих интенсивные маневры.
Существуют ограничения на пределы изменения числа оборотов несущего винта в полете, обусловленные требованиями аэродинамической эффективности и управляемости, а также прочности двигателей, трансмиссии и других систем. Поэтому принимаются специальные меры, чтобы не допустить в полете выхода числа оборотов несущего винта за установленные ограничения.
Известен способ управления оборотами несущего винта с помощью системы шаг-газ (см., например, М.М. Масленников, Ю.Г. Бехли, Ю.И. Шальман. Газотурбинные двигатели для вертолетов. М.: Машиностроение, 1969, стр. 117). Этот способ заключается в следующем. Летчик рычагом общего шага изменяет шаг несущего винта. Одновременно механическая связь этого рычага с топливным регулятором обеспечивает изменение режима работы двигателя с целью поддержания заданного числа оборотов несущего винта. Однако при изменении условий полета обороты несущего винта изменяются, и летчик восстанавливает их путем дополнительной коррекции режима работы двигателя ручкой коррекции. Недостатком этого способа является дополнительная загрузка летчика работой по поддержанию оборотов несущего винта (свободной турбины). Поэтому рассмотренный выше способ на современных вертолетах практически не применяется.
Известен также способ автоматического поддержания постоянного числа оборотов несущего винта (см., например, М.М. Масленников, Ю.Г. Бехли, Ю.И. Шальман. Газотурбинные двигатели для вертолетов. М.: Машиностроение, 1969, стр. 109). При этом способе летчик ручкой управления и рычагом общего шага воздействует на несущий винт, изменяя его нагрузку путем изменения шага винта. При этом он непосредственно не управляет двигателем. Изменение нагрузки несущего винта приводит к изменению оборотов винта и свободной турбины, вследствие чего вступает в работу регулятор числа оборотов свободной турбины, изменяющий подачу топлива в двигатель для восстановления прежнего числа оборотов винта. Таким образом, летчик освобождается от прямого управления двигателем.
Устройство для реализации описанного способа включает в себя рычаг общего шага, который через проводку управления соединен через гидроусилитель с ползуном автомата перекоса; ручку управления, которая через проводку управления соединена через гидроусилитель с тарелкой автомата перекоса и рычагом поворота лопасти; редуктор, соединяющий вал двигателя (двигателей) с валом несущего винта и снабженный тахогенератором с указателем числа оборотов; топливный регулятор, установленный на двигателе и связанный с датчиками оборотов свободной турбины и турбокомпрессора (см., например, М.М. Масленников, Ю.Г. Бехли, Ю.И. Шальман. Газотурбинные двигатели для вертолетов. М.: Машиностроение, 1969, стр. 109 и И.С. Дмитриев, С.Ю. Есаулов. Системы управления одновинтовых вертолетов, рис. 2.1, стр. 32).
Известные способ и устройство хорошо стабилизируют обороты несущего винта (свободной турбины) на режимах плавного изменения параметров полета вертолета, но при энергичном пилотировании, требуемом для выполнения маневров, точность стабилизации оборотов неудовлетворительна и имеют место большие изменения числа оборотов несущего винта.
Для того чтобы пояснить причины больших изменений числа оборотов винта при выполнении интенсивных маневров, воспользуемся уравнением динамики вращения винта

где I - полярный момент инерции несущего винта;
Npacп - располагаемая мощность на валу несущего винта, создаваемая двигателем (двигателями);
Nпорт - потребная мощность несущего винта;
ω - угловая скорость вращения несущего винта;
 - угловое ускорение вращения несущего винта.
- угловое ускорение вращения несущего винта.
Угловая скорость вращения несущего винта ω связана с числом оборотов несущего винта nв постоянным коэффициентом, т.е. имеют место равенства ω=к·nв и  .
.
При выполнении маневра летчик может интенсивно за 1-2 с изменить Nпорт на существенную величину. Так, сбросив общий шаг и увеличивая угол тангажа, можно за 1-2 с уменьшить потребную мощность до околонулевого значения. Располагаемая мощность будет уменьшаться двигательной автоматикой до режима полетного малого газа за существенно большее время. В результате в соответствии с уравнением (1) произойдет раскрутка несущего винта. В случае вывода из режима раскрутки путем увеличения общего шага и уменьшения угла тангажа потребная мощность быстро возрастает, а располагаемая мощность будет нарастать заметно медленнее. Это вызовет просадку оборотов винта. Просадка оборотов несущего винта может быть также очень большой, поскольку выход может выполняться на малой скорости, при которой потребная мощность окажется существенно большей, чем при исходном установившемся полете. Проблему раскрутки и просадки оборотов несущего винта известные способы и устройства решают только за счет улучшения приемистости двигателей, т.е. более быстрого изменения располагаемой мощности. Однако существующие ограничения по газодинамике двигателя не позволяют уменьшить время приемистости до величины менее 5 с, а при такой приемистости проблема раскрутки и просадки оборотов винта при выполнении интенсивных маневров остается актуальной, в частности, и потому, что инерционный член  создает большую переменную составляющую момента на зубьях шестерен редуктора, что приводит к резкому снижению его ресурса. Поэтому летчик должен наблюдать за изменением оборотов винта по указателю и не допускать их выхода за установленные ограничения. Это усложняет пилотирование и угрожает безопасности полета, поскольку летчик наблюдает за показаниями приборов и ослабляет контроль за положением вертолета относительно земли. Известен случай, когда очень опытный летчик-испытатель 1 класса, контролируя показания приборов при выполнении косой петли, “потерял землю” и, пытаясь найти ее, совершил “кувырок”, что едва не кончилось тяжелым авиационным происшествием.
создает большую переменную составляющую момента на зубьях шестерен редуктора, что приводит к резкому снижению его ресурса. Поэтому летчик должен наблюдать за изменением оборотов винта по указателю и не допускать их выхода за установленные ограничения. Это усложняет пилотирование и угрожает безопасности полета, поскольку летчик наблюдает за показаниями приборов и ослабляет контроль за положением вертолета относительно земли. Известен случай, когда очень опытный летчик-испытатель 1 класса, контролируя показания приборов при выполнении косой петли, “потерял землю” и, пытаясь найти ее, совершил “кувырок”, что едва не кончилось тяжелым авиационным происшествием.
Технической задачей заявленного способа и устройства является обеспечение автоматического поддержания оборотов несущего винта вертолета в допустимых пределах при выполнении интенсивных маневров.
Технический результат обеспечивается тем, что:
1. В способ поддержания числа оборотов несущего винта вертолета в допустимых пределах, включающий автоматическое изменение располагаемой мощности за счет изменения подачи топлива в двигатель (двигатели) для восстановления заданного числа оборотов, контроль за числом оборотов винта по указателю и управление потребной мощностью вертолета для поддержания оборотов несущего винта в допустимых пределах путем воздействия летчика на шаг винта с помощью рычага общего шага и ручки управления, вводят дополнительно автоматическое управление потребной мощностью изменяя общий шаг несущего винта на величину
 ,
,
где Δϕап - изменение общего шага автопилотом;
Δnв - изменение оборотов несущего винта от заданного значения;
 - скорость изменения оборотов несущего винта;
- скорость изменения оборотов несущего винта;
 - передаточные числа автопилота.
- передаточные числа автопилота.
2. В устройство автоматического поддержания оборотов несущего винта, содержащее рычаг общего шага, который через проводку управления соединен через гидроусилитель с ползуном автомата перекоса, редуктор, соединяющий вал двигателя (двигателей) с валом несущего винта и снабженный тахогенератором с указателем числа оборотов, топливный регулятор, установленный на двигателе и связанный с датчиками оборотов свободной турбины и турбокомпрессора, дополнительно установлен формирующий электрический сигнал вычислитель, вход которого соединен с тахогенератором и переключателем перенастройки оборотов винта, а выход соединен с преобразователем электрического сигнала в механическое перемещение, соединенным с несущим винтом через гидроусилитель в канале общего шага.
Сущность изобретения поясняется чертежами, где показано:
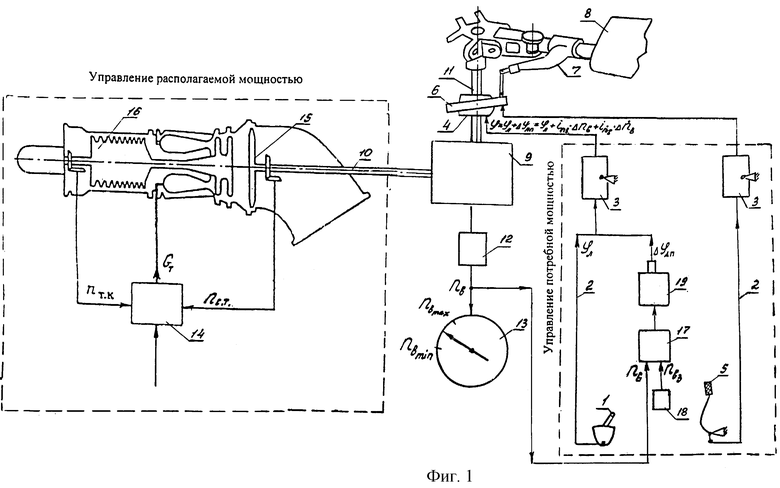
- на фиг.1 - упрощенная схема заявляемого способа и устройства,
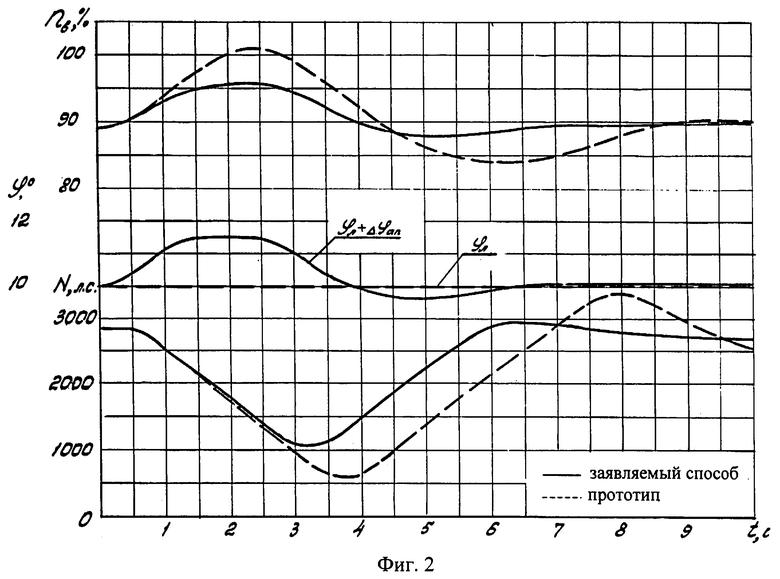
- на фиг.2 - изменение по времени числа оборотов винта (nв), общего шага несущего винта (ω) и суммарной мощности двух двигателей (N) при выполнении горки,
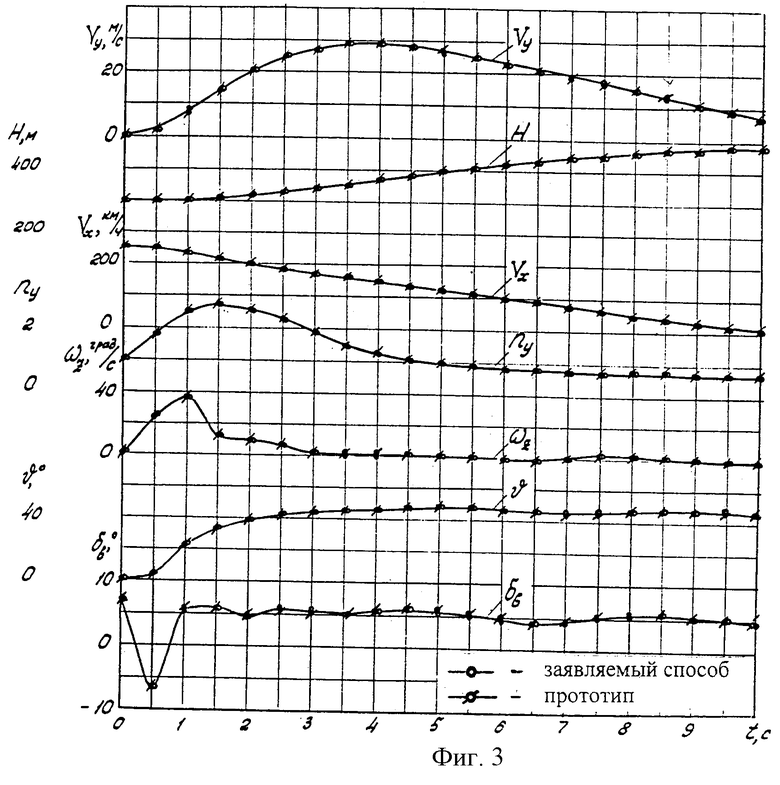
- на фиг.3 - изменение по времени вертикальной скорости (Vy), высоты полета (Н), горизонтальной скорости (Vx), вертикальной перегрузки (nу), угловой скорости тангажа (ωz), угла тангажа (ϑ) и продольного отклонения автомата перекоса (δв) при выполнении горки.
Заявляемое устройство автоматического поддержания оборотов несущего винта в допустимых пределах (см. фиг.1) содержит рычаг общего шага 1, который через проводку управления 2 соединен через гидроусилитель 3 с ползуном автомата перекоса 4, ручку управления 5, которая через проводку управления 2 соединена через гидроусилитель 3 с тарелкой автомата перекоса 6, которая соединена рычагом поворота 7 лопасти несущего винта 8, редуктор 9, соединяющий вал двигателя 10 с валом несущего винта 11 и снабженный тахогенератором 12 с указателем числа оборотов несущего винта 13, топливный регулятор 14, установленный на двигателе и связанный с датчиком оборотов свободной турбины 15 и турбокомпрессора 16, дополнительно устанавливаемый вычислитель 17, вход которого соединен с тахогенератором 12 и переключателем оборотов винта 18, а выход соединен с преобразователем 19, соединенным с ползуном автомата перекоса 4 через гидроусилитель 3 в канале общего шага.
Заявляемый способ поддержания числа оборотов несущего винта в допустимых пределах реализуется следующим образом.
Летчик, выполняя энергичный маневр, ручкой управления 5, через проводку управления 2 и гидроусилители 3 изменяет наклон тарелки автомата перекоса 6, что через рычаг поворота 7 изменит угол установки лопасти 8. При этом угол установки лопасти будет меняться в зависимости от азимутального положения лопасти (циклическое изменение шага).
Кроме того, летчик рычагом управления общего шага 1 через проводку управления 2 и гидроусилитель 3 перемещает ползун автомата перекоса 4 вместе с тарелкой автомата перекоса 6 вдоль вала несущего винта, что через рычаг поворота 7 изменяет угол установки лопасти несущего винта 8 на всех азимутальных положениях лопасти на одну и ту же величину (общий шаг винта).
Этим самым летчик изменяет угол атаки несущего винта, скорость полета, тягу несущего винта, а следовательно, обороты несущего винта nв и обороты свободной турбины nст, поскольку они связаны между собой валами 10 и 11 через редуктор 9, а также изменит обороты тахогенератора 12 и положение стрелки указателя оборотов винта 13. Изменение оборотов свободной турбины изменит подачу топлива в двигатель топливным регулятором 14, что приведет к изменению оборотов nтк турбокомпрессора 16 и мощности двигателя (двигателей) в сторону стабилизации заданных оборотов несущего винта. Вычислитель 17 определит отклонение оборотов винта от заданных Δnв=nв-nвз, путем дифференцирования определит скорость изменения оборотов  , сформирует в электрическом виде управляющий сигнал
, сформирует в электрическом виде управляющий сигнал  и подаст его на преобразователь 19, который преобразует электрический сигнал в механическое перемещение Δϕап. При этом угол общего шага несущего винта ϕ будет определяться по формуле
и подаст его на преобразователь 19, который преобразует электрический сигнал в механическое перемещение Δϕап. При этом угол общего шага несущего винта ϕ будет определяться по формуле

где ϕл - значение угла общего шага, устанавливаемое летчиком при помощи рычага общего шага.
При увеличении оборотов несущего винта ϕ увеличится, при уменьшении оборотов ϕ уменьшится. Соответственно будет изменяться и потребная мощность, в результате чего в соответствии с уравнением (1) уменьшится раскрутка и просадка оборотов при интенсивном маневре. Таким образом, автоматическое приведение числа оборотов винта к заданным осуществиться не только за счет изменения располагаемой мощности путем изменения расхода топлива Gт, но и за счет изменения потребной мощности путем автоматического дополнительного изменения общего шага.
Входящие в заявляемое устройство дополнительные элементы 18 и 19 хорошо известны и используются в автопилотах. При этом в случае механической проводки управления преобразователи реализуются в виде рулевых машин (раздвижных тяг), которые включаются в систему управления либо по параллельной, либо по дифференциальной схемам (см. И.С. Дмитриев, С.Ю. Есаулов. Системы управления одновинтовых вертолетов. М., 1969).
Это позволяет считать, что реализация заявляемого способа и устройства не вызывает сомнений.
На современных вертолетах наблюдается тенденция замены механической проводки от летчика до гидроусилителя на электрическую. В этом случае заявляемое устройство упрощается, поскольку преобразование электрических сигналов от летчика и вычислителя в механическое перемещение осуществляется в гидроусилителе (рулевом приводе).
Эффективность предлагаемого способа и устройства проверена методом численного интегрирования на ЭВМ по программе, разработанной на ОАО “Камов” для маневренных вертолетов, результаты моделирования по которой хорошо совпадают с материалами летных испытаний.
В качестве типового маневра выбрана горка. Как видно из фиг.2, при выполнении горки с постоянным общим шагом ϕл=9,8° обороты несущего винта по прибору изменяются в диапазоне nв mах=101% и nв min=84%. При этом значение 101% превышает максимально-допустимое значение.
При предлагаемом способе обороты несущего винта по прибору на горке изменяются в диапазоне nв mах=95,5% и nв min=88%.
При существующем способе обороты несущего винта по прибору на горке по сравнению с исходным значением 89% выросли на 12%, а затем уменьшились на 5%. При предлагаемом способе обороты выросли на 6,5% и уменьшились всего на 1%.
Как видно из фиг.2, при существующем способе располагаемая мощность двигателей сначала уменьшилась с 2850 до 600 л.с., а затем выросла до величины 3400 л.с.
Управление же общим шагом по заявляемому способу не позволило уменьшиться располагаемой мощности менее 1100 л.с. Увеличение мощности при этом произошло до величины всего 2950 л.с., причем увеличение мощности началось примерно на 1 с раньше, чем при существующем способе, что положительно повлияло на переходной процесс. При этом увеличение потребной мощности в начале горки за счет увеличения общего шага на величину порядка 1,5° привело к уменьшению максимальных оборотов винта на горке, а большее значение располагаемой мощности и некоторое уменьшение шага уменьшили последующий провал оборотов винта.
Как видно из фиг.3, параметры движения вертолета при выполнении горки по существующему и предлагаемому способу практически не изменились. Этому факту можно дать следующее объяснение. Отличие в параметрах движения могло произойти только по причине изменения тяги винта из-за изменения общего шага и оборотов несущего винта. Хорошо известно, что тяга винта пропорциональна общему шагу и квадрату оборотов. При выполнении горки по существующему способу шаг не менялся, а максимальное число оборотов изменилось по отношению к исходному на 12,5%, что соответствует изменению тяги примерно на 27%. При выполнении горки по предлагаемому способу общий шаг увеличился на 15%, а максимальные обороты на 6,5%, что соответствует увеличению тяги примерно на 32%. Такая разница в тягах не может существенно повлиять на параметры движения вертолета.
Как отмечалось выше, расчеты выполнялись для маневра “горка”. При выполнении расчетов передаточные числа  не оптимизировались. В случае их оптимизации обороты несущего винта при заявляемом способе будут изменяться еще меньше.
не оптимизировались. В случае их оптимизации обороты несущего винта при заявляемом способе будут изменяться еще меньше.
При выполнении других маневров картина качественно не изменится, но могут иметь место некоторые количественные расхождения. Особенно сильные расхождения в пользу заявляемого способа будут на режиме форсированного виража.
Использование заявляемого способа поддержания оборотов несущего винта по сравнению с известным существенно увеличит резерв внимания пилота при выполнении интенсивных маневров, будет способствовать увеличению ресурса трансмиссии, облегчит процесс обучения и повысит безопасность выполнения маневров.
В заключение отметим, что на фиг.1 показана схема для случая одновинтового вертолета. В случае многодвигательного вертолета способ и устройство не меняются. Несколько усложняется система регулирования из-за необходимости обеспечения синхронизации режимов работы двигателей в полете, что для рассматриваемых в заявке вопросов не имеет принципиального значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 1990 |
|
SU1826423A1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СПОСОБ УМЕНЬШЕНИЯ УГЛА АТАКИ НЕСУЩЕГО ВИНТА НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА (ВАРИАНТЫ) | 2014 |
|
RU2539621C1 |
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ | 2006 |
|
RU2340511C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И СИГНАЛИЗАЦИИ О ПРИБЛИЖЕНИИ НЕСУЩЕГО ВИНТА К ЗОНЕ РЕЖИМОВ "ВИХРЕВОГО КОЛЬЦА" НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2486596C1 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЁТА В РЕЖИМЕ АВТОРОТАЦИИ | 2019 |
|
RU2721028C1 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| Узел объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления и муфта сцепления для него | 2017 |
|
RU2652866C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
Изобретение относится к области авиации, в частности к системам управления, и может быть использовано в системах управления вертолетами. Способ поддержания постоянного числа оборотов несущего винта (НВ) в допустимых пределах включает в себя автоматическое изменение располагаемой мощности за счет изменения подачи топлива в двигатель (двигатели) для восстановления заданного числа оборотов, контроль за числом оборотов НВ по указателю и управление потребной мощностью вертолета для поддержания оборотов НВ в допустимых пределах. Это осуществляется путем воздействия летчика на шаг НВ с помощью рычага и ручки управления, при этом помимо изменения общего шага НВ, произведенного летчиком, вводится автоматическое дополнительное изменение общего шага НВ. Устройство реализации данного способа включает в себя рычаг общего шага и ручку управления в системе управления летчиком вертолета. Кроме этого, дополнительно установлен вычислитель, вход которого соединен с тахогенератором и переключателем перенастройки оборотов винта, а выход соединен с преобразователем электрического сигнала в механическое перемещение, соединенный с НВ через гидроусилитель в канале общего шага. Технический результат заключается в обеспечении автоматического поддержания оборотов НВ. 2 с.п. ф-лы, 3 ил.

где Δϕaп - изменение общего шага автопилотом;
ΔnB - изменение оборотов несущего винта от заданного значения;
 - передаточные числа автопилота.
- передаточные числа автопилота.
| Масленников М.М | |||
| и др | |||
| Газотурбинные двигатели для вертолетов | |||
| - М.: Машиностроение, 1969, с.32, 109, рис.2.1 | |||
| Дмитриев И.С., Есаулов С.Ю | |||
| Системы управления одновинтовых вертолетов | |||
| - М.: Машиностроение, 1969, с.203 и 204, рис.6.5 | |||
| US 4466526 А, 21.08.1984 | |||
| US 6012676 A, 11.01.2000 | |||
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ РЕГУЛИРОВКИ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 1995 |
|
RU2142567C1 |

