Текст описания приведен в факсимильном виде.
















| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2010 |
|
RU2422772C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ АВТОДОРОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402037C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2401436C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2521972C1 |
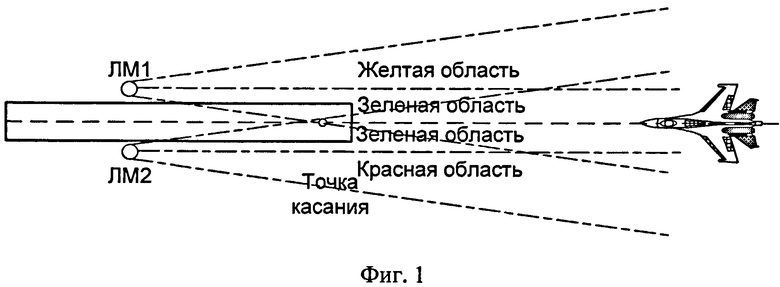


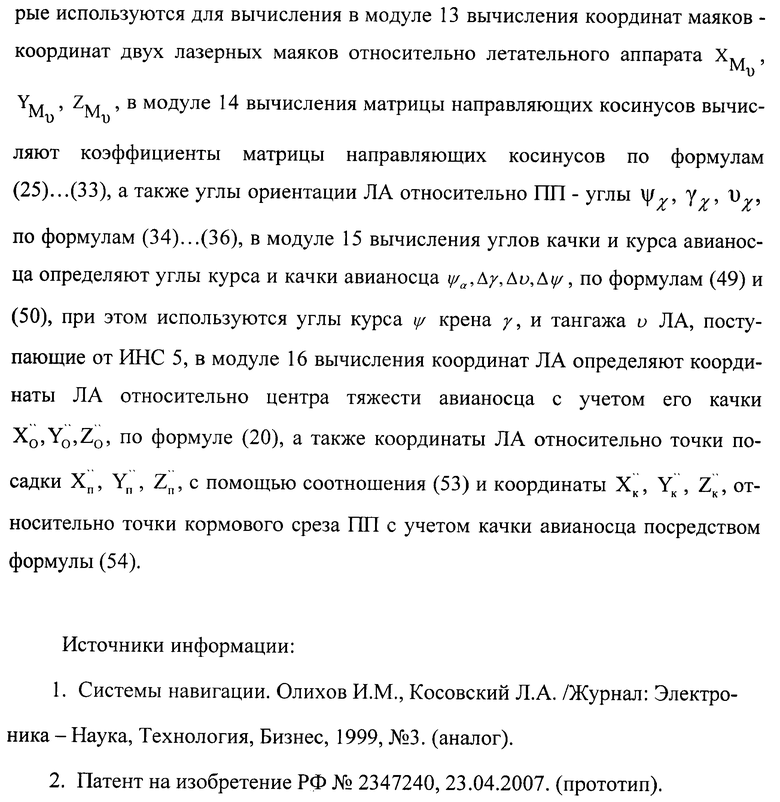
Изобретение относится к области приборостроения и может найти применение в системах определения позиции контролируемого объекта на основе использования нескольких разнесенных источников излучения. Технический результат - повышение точности. Для достижения данного результата определяют координаты изображений маяков на фотоматрицах, вычисляют координаты маяков в системе координат, связанной с летательным аппаратом (ЛА), вычисляют углы ориентации ЛА относительно авианосца. При этом используют сигналы инерциальной навигационной системы ЛА, определяют курс и углы качки авианосца, координаты местоположения ЛА относительно центра тяжести авианосца, точки кормового среза взлетно-посадочной полосы (ВПП) и точки посадки ЛА. Устройство содержит модуль лазерных маяков, два оптико-локационных блока, содержащие каждый фотообъектив и фотоматрицу, вычислитель, содержащий модуль обработки оцифрованного изображения лазерных маяков, модуль вычисления координат маяков, модуль вычисления матрицы направляющих косинусов, модуль вычисления углов качки и курса авианосца и модуль вычисления координат ЛА. 2 н.п. ф-лы, 5 ил.
1. Способ определения качки авианосца и местоположения летательного аппарата, основанный на регистрации излучения лазерных маяков, обработке их оцифрованного изображения и вычислении координат местоположения летательного аппарата (ЛА), отличающийся тем, что в качестве источников излучения используют два одинаковых лазерных маяка, а также используют сигналы инерциальной навигационной системы (ИНС), регистрируют излучение каждого из двух лазерных маяков с известными координатами, установленных слева и справа от полетной палубы (ПП) авианосца, посредством двух разнесенных оптико-локационных блоков (ОЛБ), установленных на борту ЛА и выполненных каждый в виде плоской фоточувствительной матрицы, размещенной в фокальной плоскости фотообъектива, осуществляют обработку оцифрованных изображений, снимаемых с фоточувствительных матриц для определения координат изображений лазерных маяков, вычисляют координаты первого  ,
,  ,
,  и второго
и второго  ,
,  ,
,  лазерных маяков относительно ЛА:
лазерных маяков относительно ЛА:
 ,
,
 ,
,
 ,
,
где Y1υ, Z1υ, Y2υ, Z2υ - координаты изображений маяков, м, первый индекс обозначает номер фоточувствительной матрицы, второй индекс - номер маяка υ=1,2, для маяка M1 и М2 соответственно; F - фокусное расстояние фотообъектива, м; В - расстояние между первым и вторым ОЛБ, м, вычисляют углы ψχ, γχ, υχ ориентации ЛА относительно ПП:
 ,
,
 ,
,
 ,
,
где
 ,
,
 ,
,
 ,
,
 ,
,  ,
,  ,
,  ,
,  ,
,  - известные координаты первого и второго маяков в системе координат, связанной с авианосцем, вычисляют матрицу направляющих косинусов
- известные координаты первого и второго маяков в системе координат, связанной с авианосцем, вычисляют матрицу направляющих косинусов

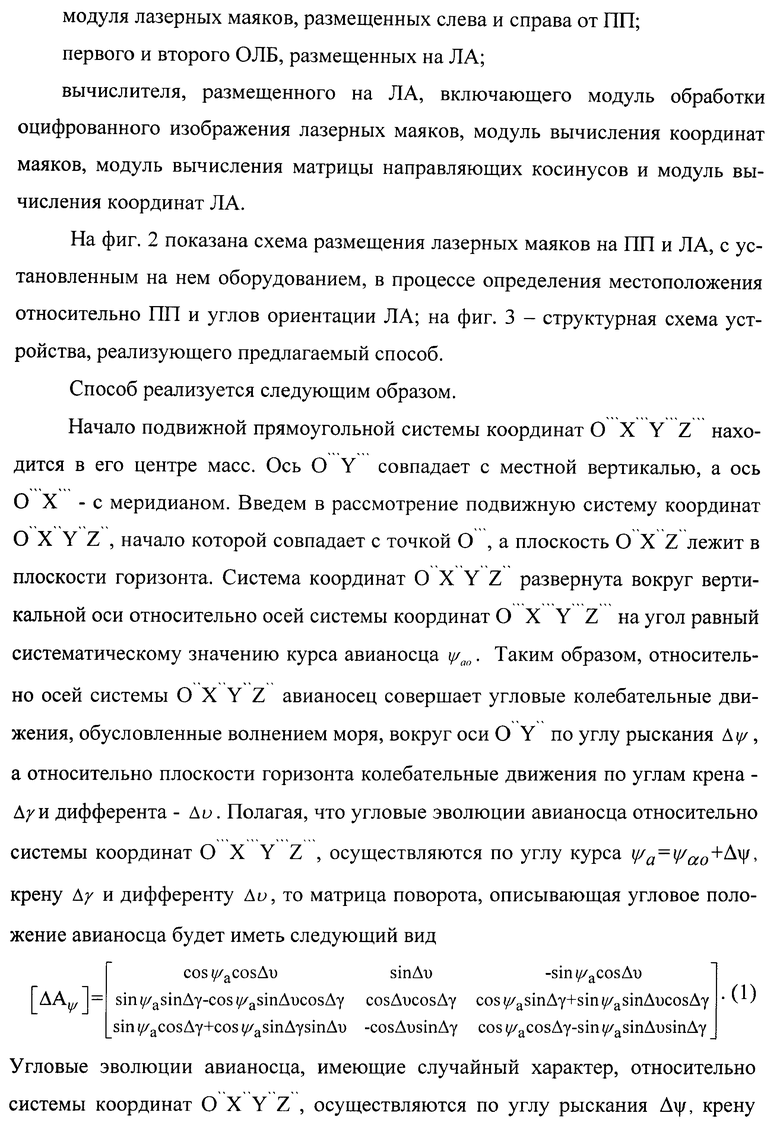
вычисляют углы качки Δυ, Δγ и курса ψα авианосца
Δυ=arcsinΔA12, 
где ΔAij - элементы матрицы [ΔAψ] (i, j=1…3),
ΔA11=cosψ cosυ cosψχ cosυχ + sinυ sinυχ + sinψ cosυ sinψχ cosυχ,
ΔA12=cosψ cosυ (sinψχ sinγχ - cosψχ sinυχ cosγχ) + sinυ cosυχ cosγχ - sinψ cosυ (cosψχ sinγχ + sinψχ sinυχ cosγχ),
ΔА13=cosψ cosυ (sinψχ cosγχ + cosψχ sinγχ sinυχ) - sinυ cosυχ sinγχ - sinψ cosυ (cosψχ cosγχ - sinψχ sinυχ sinγχ),
ΔA21=(sinψ sinγ + cosψ sinυ cosγ)cosψχ cosυχ + cosυ cosγ sinυχ - (cosψ sinγ + sinψ sinυ cosγ)sinψχ cosυχ,
ΔA22=(sinψ sinγ - cosψ sinυ cosγ)(sinψχ sinγχ - cosψχ sinυχ cosγχ) + cosυ cosγ cosυχ cosγχ + (cosψ sinγ + sinψ sinυ cosγ)(cosψχ sinγχ + sinψχ sinυχ cosγχ),
ΔA23=(sinψ sinγ - cosψ sinυ cosγ)(sinψχ cosγχ + cosψχ sinγχ sinυχ) - cosυ cosγ cosυχ sinγχ + (cosψ sinγ + sinψ sinυ cosγ)(cosψχ cosγχ - sinψχ sinυχ cosγχ),
ΔA31=(sinψ cosγ + cosψ sinγ sinυ)cosψχ cosυχ - cosυ sinγ sinυχ - (cosψ cosγ - sinψ sinυ sinγ)sinψχ cosυχ,
ΔA32=(sinψ cosγ + cosψ sinγ sinυ)(sinψχ sinγχ - cosψχ sinυχ cosγχ) + cosυ cosγ cosυχ sinγχ + (cosψ cosγ - sinψ sinυ sinγ)(cosψχ sinγχ + sinψχ sinυχ cosγχ),
ΔA33=(sinψ cosγ + cosψ sinγ sinυ)(sinψχ cosγχ + cosψχ sinγχ sinυχ) - cosυ sinγ cosυχ cosγχ + (cosψ cosγ - sinψ sinυ sinγ)(cosψχ sinγχ - sinψχ sinυχ sinγχ),
при этом сигналы γ - угол крена, υ - угол тангажа, ψ - угол курса ЛА получают от ИНС,
вычисляют систематическую ψαo и случайную Δψ составляющие угла курса авианосца
 , Δψ=ψα-ψαo,
, Δψ=ψα-ψαo,
где t - текущее время с момента начала измерений, вычисляют координаты ЛА  ,
,  ,
,  относительно центра тяжести авианосца с учетом качки
относительно центра тяжести авианосца с учетом качки
 ,
,
вычисляют координаты  ,
,  ,
,  относительно точки посадки учетом качки авианосца,
относительно точки посадки учетом качки авианосца,
 ,
,
где

- вектор линейных перемещений точки посадки,
 ,
,  ,
,  - известные координаты точки посадки, в связанной с авианосцем системе координат,
- известные координаты точки посадки, в связанной с авианосцем системе координат,
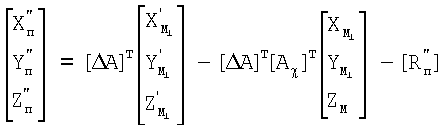
вычисляют координаты ЛА  ,
,  ,
,  относительно точки кормового среза ПП с учетом качки авианосца,
относительно точки кормового среза ПП с учетом качки авианосца,
 ,
,
где

- вектор линейных перемещений точки кормового среза ПП,


 - известные координаты точки пересечения кормового среза с осевой линией полетной палубы, в связанной с авианосцем системе координат.
- известные координаты точки пересечения кормового среза с осевой линией полетной палубы, в связанной с авианосцем системе координат.
2. Устройство для определения качки авианосца и местоположения летательного аппарата, включающее два разнесенных в пространстве источника оптического излучения, обеспечивающих формирование области излучения посадочной траектории, отличающееся тем, что источники оптического излучения образуют модуль лазерных маяков, содержащий два разнесенных одинаковых лазерных маяка с известными координатами, формирующих каждый пучок оптического излучения одной длины волны, установленных слева и справа от полетной палубы (ПП) авианосца, и дополнительно содержит два разнесенных оптико-локационных блока (ОЛБ), выполненных в виде фотообъектива и фоточувствительной матрицы, и вычислитель, размещенные на борту летательного аппарата (ЛА), причем вычислитель содержит модуль обработки оцифрованного изображения лазерных маяков, модуль вычисления координат маяков, модуль вычисления матрицы направляющих косинусов, модуль вычисления углов качки и курса авианосца и модуль вычисления координат ЛА, а также инерциальную навигационную систему (ИНС), при этом модуль обработки оцифрованного изображения лазерных маяков, где определяют координаты изображений лазерных маяков на фоточувствительных матрицах, своим первым входом связан с фоточувствительной матрицей первого ОЛБ, на которой с помощью фотообъектива первого ОЛБ формируются изображения первого и второго лазерных маяков, а своим вторым входом связан с фоточувствительной матрицей второго ОЛБ, на которой с помощью фотообъектива второго ОЛБ формируются изображения первого и второго лазерных маяков, а своим выходом связан с входом модуля вычисления координат маяков, где путем вычислений определяют координаты двух маяков в системе координат, связанной с ЛА, своим выходом связанного с входом модуля вычисления матрицы направляющих косинусов, где вычисляются углы ориентации ЛА относительно ПП, выход модуля вычисления матрицы направляющих косинусов связан с первым входом модуля вычисления углов качки и курса авианосца, второй вход которого связан с выходом ИНС, где вычисляются углы качки и угол курса авианосца, модуль вычисления координат ЛА своим входом связан с выходом модуля вычисления углов качки и курса авианосца, где вычисляются координаты ЛА относительно центра тяжести авианосца, координаты ЛА относительно точки посадки и координаты ЛА относительно точки кормового среза ПП с учетом качки авианосца.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| ОПТИЧЕСКОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2083444C1 |
| WO 2006135916 A1, 21.12.2006 | |||
| US 2006227014 A1, 12.10.2006 | |||
| US 2005088642 A1, 28.04.2005. | |||

