Группа изобретений относится к навигации и может быть использована для автоматического управления посадкой летательного аппарата (ЛА), коррекции инерциальных навигационных систем ЛА в процессе взлета.
Оптические устройства дистанционного определения ориентации подвижных объектов содержат размещаемые на подвижном объекте реперные источники излучения (РИ) и оптико-локационные блоки (ОЛБ), размещаемые на базовом (неподвижном) основании, относительно которого производится определение ориентации подвижного объекта.
Оптико-локационные блоки определяют направления на отдельные РИ (углы-пеленги РИ), используя которые определяют ориентацию подвижных объектов. В ОЛБ широко используются двумерные анализаторы плоских изображений, например, на основе матричных фотодетекторов в сочетании с дальномерным устройством [1]. В классической стереоскопической схеме построения устройств определения ориентации подвижных объектов измеряют углы-пеленги РИ с двух точек, разнесенных на известное расстояние, затем определяют координаты РИ и ориентацию подвижного объекта.
Известен способ локации источников излучения, описанный в патенте на изобретение GB № 2002986 А, опубл. 28.02.1979, размещаемых на подвижных объектах, в котором предусматривается использование двух цилиндрических объективов-анаморфотов для формирования изображений РИ в плоскости линейки фотодетекторов. Определив координату изображения РИ и зная фокусное расстояние цилиндрического объектива, определяют угол-пеленг РИ. Используя полученные данные, зная расстояние между формирователями изображения (точками, относительно которых производятся отсчеты углов-пеленгов), вычисляют координаты РИ.
Измерение ориентации подвижного объекта производится в три этапа:
определение углов-пеленгов;
вычисление координат РИ;
вычисление ориентации подвижного объекта с использованием полученных значений координат РИ.
Недостатком такого способа является размещение ОЛБ на неподвижном основании (что соответствует размещению на земле применительно к задаче обеспечения посадки ЛА), а также недостаточная информативность, связанная с измерением только угловых координат подвижного объекта.
Известен способ [3] определения положения ЛА в пространстве с помощью мобильной лазерной системы, который состоит в формировании трех цветовых зон в окрестности посадочной траектории, как это показано на фиг.1, и визуальном восприятии летчиком излучения в заданной длине волны, по которой определяется положение ЛА относительно створа взлетно-посадочной полосы (ВПП). Каждый из лазерных маяков создает две непересекающиеся (прилегающие) цветовые зоны. Первый маяк ЛМ1 формирует желтую и зеленую зоны, а второй маяк ЛМ2 - зеленую и красную. Излучение маяков направляют так, чтобы линии прилегания цветовых зон первого и второго маяков были параллельны оси ВПП, при этом формируется центральная зона зеленого цвета - створная полоса и две боковые зоны желтого и красного цветов соответственно.
Недостатками этого способа являются:
низкая информативность, проявляющаяся в измерении только одного параметра - бокового отклонения от оси ВПП;
низкая точность, обусловленная неопределенным положением ЛА в пределах одной цветовой зоны излучения;
визуальная оценка летчиком положения ЛА, что приводит к необходимости участия человека в контуре управления самолетом, при этом автоматическая посадка невозможна.
Известно устройство определения положения ЛА в пространстве с помощью мобильной лазерной трехцветной навигационной системы, описанное в патенте РФ на изобретение № 2083444, кл. G01S 5/08, 22.03.1994 г., которое содержит два разнесенных источника оптического излучения, расположенных на полосах безопасности ВПП и позволяющих получать пучки оптического излучения различной длины, причем каждый источник оптического излучения позволяет получить не менее двух не перекрывающихся пучков оптического излучения, при этом диапазон длин волн одного из пучков оптического излучения первого источника совпадает с диапазоном длин волн одного из пучков оптического излучения второго источника; источники оптического излучения расположены таким образом, что их пучки с совпадающими длинами волн перекрываются в створной полосе, а остальные пучки оптического излучения расположены с внешних сторон перекрывающихся пучков оптического излучения относительно створной полосы, образуя, таким образом, три зоны покрытые оптическим излучением только одной длины волны.
Недостатками данного устройства являются недостаточная точность, поскольку положение ЛА относительно оси взлетно-посадочной полосы (ВПП) в пределах одной цветовой зоны является неопределенным. Угловые параметры положения ЛА, дальность и высота не измеряются. Сигнал измеряемой величины не формируется, что приводит к невозможности автоматизации посадки.
Технической задачей изобретения является повышение точности измерения местоположения ЛА относительно оси ВПП. Технический результат при использовании заявляемой группы изобретений заключается в повышении точности и информативности определения местоположения ЛА относительно ВПП и углов его ориентации, достигаемые за счет использования высокоточных измерителей первичной навигационной информации (оптико-локационных блоков) и вычислителя, алгоритм которого не содержит упрощений, приводящих к методическим погрешностям измерений.
Единый технический результат изобретения достигается тем, что в способе определения местоположения и углов ориентации ЛА относительно ВПП, основанном на формировании области излучения посадочной траектории, приеме сигналов от источников излучения и определении местоположения ЛА относительно ВПП, в качестве источников излучения используют два одинаковых лазерных маяка, регистрируют излучение каждого из двух лазерных маяков с известными координатами, установленных вдоль взлетно-посадочной полосы (ВПП) на полосах безопасности, посредством двух разнесенных оптико-локационных блоков, установленных на борту ЛА и выполненных каждый в виде плоской фотоматрицы, размещенной в фокальной плоскости фотообъектива, осуществляют обработку оцифрованного изображения, снимаемого с фотоматрицы для определения координат изображений лазерных маяков, вычисляют координаты двух лазерных маяков относительно ЛА:

где Y1υ, Z1υ, Y2υ, Z2υ - координаты изображений маяков, м, первый индекс обозначает номер фотоматрицы, второй индекс - номер маяка υ=1, 2, для маяка M1 и
М2 соответственно; F - фокусное расстояние фотообъектива, м; В - расстояние между первым и вторым ОЛБ, м, вычисляют углы ориентации ЛА относительно ВПП - углы рыскания ψ, крена γ, тангажа υ:


где







 - известные координаты первого и второго маяков в системе координат, связанной с ВПП,
- известные координаты первого и второго маяков в системе координат, связанной с ВПП,
вычисляют матрицу направляющих косинусов

вычисляют координаты ЛА относительно ВПП - горизонтальную дальность до точки касания X' o, высоту полета Y' o, боковое отклонение от оси ВПП Z'o,
 .
.
Заявляемый способ осуществляется при помощи устройства определения местоположения и углов ориентации тельного аппарата относительно взлетно-посадочной полосы, включающего два разнесенных в пространстве источника оптического излучения, обеспечивающих формирование области излучения посадочной траектории, для достижения технического результата источники оптического излучения образуют модуль лазерных маяков, содержащий два разнесенных одинаковых лазерных маяка с известными координатами, формирующих каждый пучок оптического излучения одной длины волны, установленных вдоль ВПП на полосах безопасности, и дополнительно содержащего два разнесенных ОЛБ, выполненных в виде фотообъектива и фоточувствительной матрицы и вычислитель, размещенные на борту ЛА, причем вычислитель содержит модуль обработки оцифрованного изображения лазерных маяков, модуль вычисления координат маяков, модуль вычисления матрицы направляющих косинусов и модуль вычисления координат ЛА, при этом модуль обработки оцифрованного изображения лазерных маяков, где определяют координаты изображений лазерных маяков, своим первым входом связан с фоточувствительной матрицей первого ОЛБ, на которой с помощью фотообъектива первого ОЛБ формируются изображения первого и второго лазерных маяков, а своим вторым входом связан фоточувствительной матрицей второго ОЛБ, на которой с помощью фотообъектива второго ОЛБ формируются изображения первого и второго лазерных маяков, а своим выходом связан с входом модуля вычисления координат маяков, где путем вычислений определяют координаты двух маяков в системе координат, связанной с летательным аппаратом, своим выходом связанного с входом модуля вычисления матрицы направляющих косинусов, где вычисляются углы ориентации летательного аппарата относительно ВПП - углы рыскания, крена и тангажа, выход модуля вычисления матрицы направляющих косинусов связан с входом модуля вычисления координат ЛА, где вычисляются координаты относительно ВПП - горизонтальная дальность до точки касания, высота полета, боковое отклонение от оси ВПП.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
определение координат изображений лазерных маяков на фотоматрице;
вычисление координат двух лазерных маяков в системе координат, связанной с летательным аппаратом;
вычисление значений угла рыскания, крена, тангажа и матрицы направляющих косинусов;
вычисление горизонтальной дальности, высоты и бокового отклонения летательного аппарата относительно ВПП по информации, полученной с фоточувствительных матриц первого и второго ОЛБ.
По устройству - наличие следующих элементов:
модуля лазерных маяков, размещенных на полосах безопасности ВПП;
первого и второго ОЛБ, размещенных на ЛА;
вычислителя, размещенного на ЛА, включающего модуль обработки оцифрованного изображения лазерных маяков, модуль вычисления координат маяков, модуль вычисления матрицы направляющих косинусов и модуль вычисления координат ЛА.
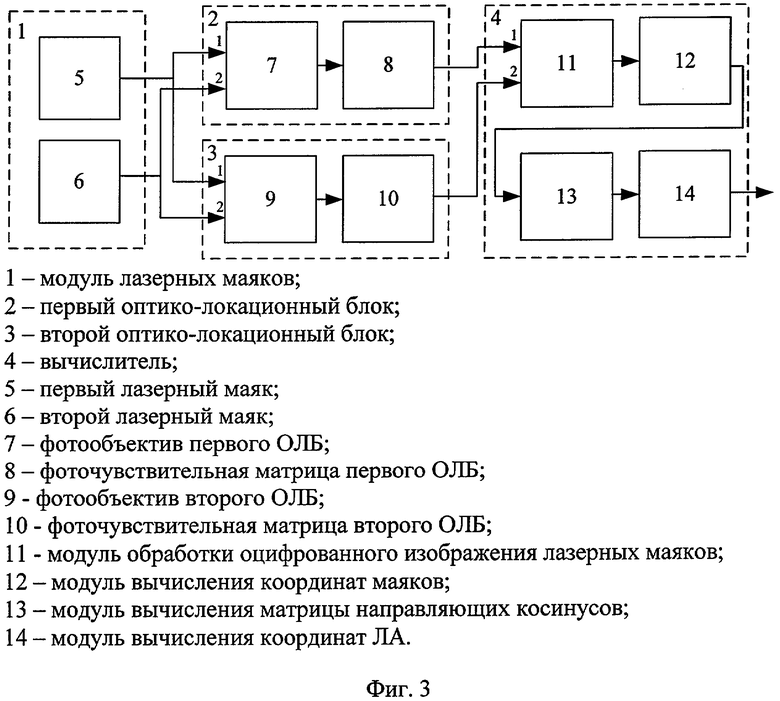
На фиг.2 показана схема размещения лазерных маяков и ЛА, с установленным на нем оборудованием, в процессе определения местоположения относительно ВПП и углов ориентации ЛА; на фиг.3 - структурная схема устройства, реализующего предлагаемый способ.
Способ реализуется следующим образом. Неподвижная прямоугольная система координат O'X'Y'Z' связанна с ВПП (фиг.4), точка О' совпадает с точкой касания (фиг.2), ось О'Х' - с осью ВПП, ось О'Y' - вертикаль. Система координат OXYZ - подвижная система, связанная с геометрическим центром фотоматрицы, где ось ОХ направлена по оптической оси фотообъектива, ось OY направлена вверх перпендикулярно горизонтальной стороны фотоматрицы, ось OZ перпендикулярна осям OX, OY, добавляя их до правой системы координат.
Пусть на самолете установлена система технического зрения (СТЗ) с двумя разнесенными ОЛБ. Рассмотрим геометрические соотношения, описывающие процесс измерения положения этого самолета относительно ВПП. Рядом с ВПП на полосе безопасности установлен лазерный маяк, излучение которого принимается обоими ОЛБ.
Известными считаем координаты точки M(X' O'M, Y' O'M, Z' O'M) в системе координат O'X'Y'Z', расстояние между центрами фотоматриц В, фокусные расстояния фотообъективов F1=F2=F.
Рассмотрим преобразование вектора  при переходе от системы координат OXYZ к O'X'Y'Z', используя для этого соотношение
при переходе от системы координат OXYZ к O'X'Y'Z', используя для этого соотношение
где XOM, YOM, ZOM - координаты вектора  в системе координат OXYZ;
в системе координат OXYZ;
X' OM, Y' OM, Z' OM - координаты вектора в системе координат O'X'Y'Z';
А - матрица направляющих косинусов, имеющая следующий вид,

где ψ, γ, υ - углы рыскания, крена и тангажа ЛА соответственно.
Преобразуем выражение (1) для вектора в системе координат O'X'Y'Z' следующим образом
 ,
,
где X' M, Y' M, Z' M, X' O, Y' O, Z' O, - координаты точек М и О соответственно, в системе O'X'Y'Z'.
Выразим из этого соотношения искомый вектор  , получим
, получим

Поскольку вектор (ХОМ, YOM, ZOM) в системе координат OXYZ непосредственно измеряется с помощью СТЗ, а вектор  известен по условию задачи, то это соотношение можно использовать для вычисления координат ЛА относительно ВПП.
известен по условию задачи, то это соотношение можно использовать для вычисления координат ЛА относительно ВПП.
Однако это матричное уравнение в скалярном виде представляет собой систему трех уравнений относительно шести неизвестных X' O, Y' O, Z' O, Ψ, γ, υ, поэтому задача может стать разрешимой, если использовать еще один маяк. Обозначим второй маяк
М2 и применим к нему уравнение (3), получим

где вектор 
 - описывает положение маяка М2 в системе координат O'X'Y'Z';
- описывает положение маяка М2 в системе координат O'X'Y'Z';
вектор 
 измеряется СТЗ.
измеряется СТЗ.
Вычитая из (4) уравнение (3), получим
Матричное уравнение (5) представляет собой систему трех уравнений относительно трех неизвестных ψ, γ, υ, решение ее может быть найдено одним из численных методов (например, методом простых итераций). Однако такой подход потребует значительных ресурсов ЭВМ при реализации этой задачи на борту ЛА в реальном масштабе времени, поэтому очень важно получить аналитическое решение системы уравнений (5), которое будет дано в процессе решения следующей задачи.
Задача о нахождении матрицы поворота вектора.
Пусть имеется два вектора единичной длины
Необходимо найти матрицу [А] размерности 3×3, такую что

где [А] - матрица направляющих косинусов (2).
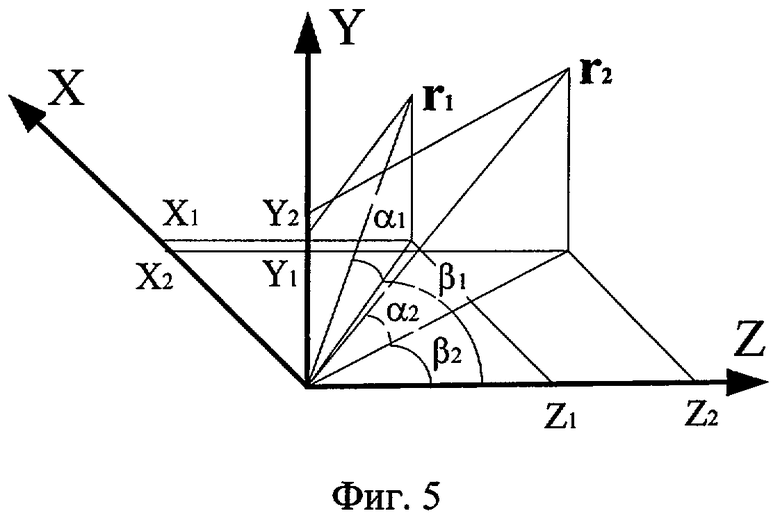
Изобразим векторы r1 и r2 и систему координат OXYZ на фиг.5.
Положение каждого вектора r1 и r2 определяется парой углов α1,β1 и α2, β2. Координаты этих векторов выражаются следующим образом.
Умножим слева вектор r1 на матрицу поворота вокруг оси OY на угол β1, получим

Из полученного выражения видно, что этот вектор лежит в плоскости OYZ и по-прежнему имеет длину, равную единице, то есть такое умножение эквивалентно повороту вектора на угол β1. Умножим теперь полученный вектор на матрицу поворота вокруг оси ОХ на угол - α1, получим

В результате двух последовательных поворотов исходного вектора r1 мы получили единичный вектор, совпадающий с осью OZ. Если теперь полученный вектор повернуть на угол α2 вокруг оси ОХ, а затем на угол β2 вокруг оси OY, то получим вектор r2.

Эти преобразования позволяют сделать вывод, что матрица поворота А преобразующая произвольный вектор r1 в вектор r2 представляет собой произведение четырех матриц

 Чтобы выразить коэффициенты этой матрицы через известные компоненты векторов r1 и r2 необходимо воспользоваться соотношениями (7), из которых получим выражения для следующих тригонометрических функций
Чтобы выразить коэффициенты этой матрицы через известные компоненты векторов r1 и r2 необходимо воспользоваться соотношениями (7), из которых получим выражения для следующих тригонометрических функций


 ,
, 







Выразим теперь коэффициенты матрицы направляющих косинусов через компоненты векторов







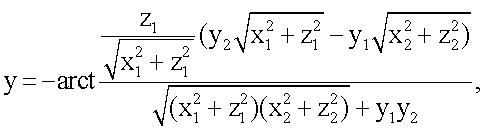
Используя теперь выражение (2) для матрицы направляющих косинусов через углы ψ, γ, υ, получим окончательные выражения для этих углов



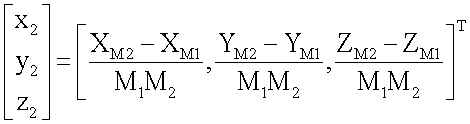
Приведем соотношение (5) к виду (6). Разделим обе части этого равенства на модуль вектора |M1M2|, получим
где


Выражения (17)…(19) с учетом обозначений (20) используют для практического вычисления углов ψ, γ, υ.
Используя выражения (8)…(16) для коэффициентов матрицы [А], с учетом обозначений (20) соотношение (4) применяется для вычисления координат точки О в системе координат, связанной с летательным аппаратом, поскольку все величины, входящие в правую часть этого равенства, выражаются через измеренные величины.
Таким образом, задача об определении координат ЛА - Х0, Y0, Z0, ψ, γ, υ решается путем применения совокупности двух наземных маяков, бортовой системы технического зрения, включающей два разнесенных оптико-локационных блока и вычислителя.
Устройство определения местоположения и углов ориентации относительно ВПП летательного аппарата содержит модуль лазерных маяков 1, включающий первый 5 и второй 6 лазерные маяки, первый 2 и второй 3 оптико-локационные блоки, содержащие каждый фотообъектив первого ОЛБ 7, фоточувствительную матрицу 8 первого ОЛБ, фотообъектив 9 второго ОЛБ и фоточувствительную матрицу 10 второго ОЛБ, вычислитель 4, включающий модуль 11 обработки оцифрованного изображения лазерных маяков, модуль 12 вычисления координат маяков, модуль 13 вычисления матрицы направляющих косинусов, модуль 14 вычисления координат ЛА.
Устройство работает следующим образом.
Излучение лазерных маяков 5, 6 модуля лазерных маяков 1 регистрирует фоточувствительная матрица 8 первого ОЛБ 2 с помощью фотообъектива 7, а также фоточувствительная матрица 10 второго ОЛБ 3 с помощью фотообъектива 9. В модуле обработки оцифрованного изображения лазерных маяков 11, куда поступают оба оцифрованных изображения, осуществляется обработка изображений путем поочередного сравнения величин R - красный, G - зеленый, В - голубой пикселей фотоматрицы с их значениями, соответствующими изображению лазера маяка, определяют коды координат изображений лазерных маяков 5, 6, которые используются для вычисления в модуле 12 вычисления координат маяков: координат двух лазерных маяков относительно летательного аппарата 

 вычисляют углы ориентации ЛА относительно ВПП - углы рыскания ψ, крена γ, тангажа υ и матрицу направляющих косинусов в модуле 13 вычисления матрицы направляющих косинусов; вычисляют координаты ЛА относительно ВПП - горизонтальную дальность до точки касания
вычисляют углы ориентации ЛА относительно ВПП - углы рыскания ψ, крена γ, тангажа υ и матрицу направляющих косинусов в модуле 13 вычисления матрицы направляющих косинусов; вычисляют координаты ЛА относительно ВПП - горизонтальную дальность до точки касания  высоту полета
высоту полета  боковое отклонение от оси ВПП
боковое отклонение от оси ВПП  посредством формулы (4) в модуле 14 вычисления координат ЛА.
посредством формулы (4) в модуле 14 вычисления координат ЛА.
Источники информации
1. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова, - М.: Машиностроение, 1990, - c.l68.
2. Патент на изобретение GB № 2002986 А, опубл. 28.02.1979 (аналог).
3. Системы навигации. Олихов И.М., Косовский Л.А. / Журнал: Электроника-Наука, Технология, Бизнес, 1999, № 3.
4. Патент РФ на изобретение № 2083444, кл. G01S 5/08, 22.03.1994 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2700908C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2521972C1 |
| Способ обеспечения посадки вертолета | 2016 |
|
RU2621215C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2010 |
|
RU2422772C1 |



Изобретение относится к определению местоположения с использованием нескольких разнесенных источников излучения. Способ позволяет автоматизировать и повысить точность измерения и заключается в том, что излучение двух разнесенных, одинаковых лазерных маяков, установленных на аэродроме вблизи взлетно-посадочной полосы (ВПП) на полосах безопасности в точках с известными координатами, регистрируют посредством двух оптико-локационных блоков, установленных на летательном аппарате (ЛА), при этом определяют координаты изображений маяков на фотоматрицах, вычисляют координаты маяков в системе координат, связанной с ЛА, вычисляют углы ориентации ЛА относительно ВПП и матрицу направляющих косинусов, а затем определяют координаты местоположения ЛА относительно ВПП. Устройство содержит наземный модуль лазерных маяков и размещенные на борту ЛА оптико-локационные блоки, содержащие каждый фотообъектив и фотоматрицу, а также вычислитель, включающий модуль обработки оцифрованного изображения лазерных маяков, модуль вычисления координат маяков, модуль вычисления матрицы направляющих косинусов и модуль вычисления координат ЛА. Достигаемым техническим результатом изобретения является повышение точности измерения местоположения ЛА относительно ВПП. 2 н.п. ф-лы, 5 ил.
1. Способ определения местоположения и углов ориентации летательного аппарата относительно взлетно-посадочной полосы, основанный на формировании области излучения посадочной траектории, приеме сигналов от источников излучения и определении местоположения летательного аппарата (ЛА) относительно взлетно-посадочной полосы (ВПП), отличающийся тем, что в качестве источников излучения используют два одинаковых лазерных маяка, регистрируют излучение каждого из двух лазерных маяков с известными координатами, установленных вдоль ВПП на полосах безопасности, посредством двух разнесенных оптико-локационных блоков, установленных на борту ЛА и выполненных каждый в виде плоской фотоматрицы, размещенной в фокальной плоскости фотообъектива, осуществляют обработку оцифрованного изображения, снимаемого с фотоматрицы для определения координат изображений лазерных маяков, вычисляют координаты двух лазерных маяков относительно летательного аппарата:

где Y1υ, Z1υ, Y2υ, Z2υ - координаты изображений маяков, м; первый индекс обозначает номер фотоматрицы, второй индекс - номер маяка υ=1, 2, для маяка M1 и M2 соответственно; F - фокусное расстояние объектива, м; В - расстояние между первым и вторым ОЛБ, м; вычисляют углы ориентации ЛА относительно ВПП - углы рыскания Ψ, крена γ, тангажа υ,



где


X'M1, Y'M1, Z'M1, X'M2, Y'M2, Z'M2 - известные координаты первого и второго маяков в системе координат, связанной с ВПП, вычисляют матрицу направляющих косинусов

вычисляют координаты ЛА относительно ВПП - горизонтальную дальность до точки касания Х'о, высоту полета Y'o, боковое отклонение от оси ВПП Z'о,
2. Устройство для определения местоположения и углов ориентации летательного аппарата относительно взлетно-посадочной полосы, включающее два разнесенных в пространстве источника оптического излучения, обеспечивающих формирование области излучения посадочной траектории, отличающееся тем, что источники оптического излучения образуют модуль лазерных маяков, содержащий два разнесенных одинаковых лазерных маяка с известными координатами, формирующих каждый пучок оптического излучения одной длины волны, установленных вдоль взлетно-посадочной полосы (ВПП) на полосах безопасности, и дополнительно содержащее два разнесенных оптико-локационных блока (ОЛБ), выполненных в виде объектива и фоточувствительной матрицы и вычислитель, включающий модуль обработки оцифрованного изображения лазерных маяков, модуль вычисления координат маяков, модуль вычисления матрицы направляющих косинусов и модуль вычисления координат летательного аппарата (ЛА), при этом модуль обработки оцифрованного изображения лазерных маяков, где определяют координаты изображений лазерных маяков, своим первым входом связан с фоточувствительной матрицей первого ОЛБ, на которой с помощью фотообъектива первого ОЛБ формируются изображения первого и второго лазерных маяков, а своим вторым входом связан с фоточувствительной матрицей второго ОЛБ, на которой с помощью фотообъектива второго ОЛБ формируются изображения первого и второго лазерных маяков, а своим выходом связан с входом модуля вычисления координат маяков, где путем вычислений определяют координаты двух маяков в системе координат, связанной с ЛА, своим выходом связанного с входом модуля вычисления матрицы направляющих косинусов, где вычисляются углы ориентации ЛА относительно ВПП - углы рыскания, крена и тангажа, выход модуля вычисления матрицы направляющих косинусов связан с входом модуля вычисления координат ЛА, где вычисляются координаты относительно ВПП - горизонтальная дальность до точки касания, высота полета, боковое отклонение от оси ВПП.
| ОПТИЧЕСКОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2083444C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282866C1 |
| RU 2000104192 A, 27.01.2002 | |||
| УСТРОЙСТВО ДЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2026242C1 |
| EP 1866888 A1, 19.12.2007 | |||
| US 2007279254 A1, 06.12.2007 | |||
| Приспособление к лесопилке с равномерной подачей для разобщения фрикционного сцепления посылочного механизма | 1934 |
|
SU41153A1 |

