Изобретение относится к области геодезии, в частности к методам определения превышений между измеряемыми точками с использованием электронных тахеометров, и может быть использовано в тригонометрическом нивелировании.
Известный способ тригонометрического нивелирования для определения превышений предполагает измерение высоты инструмента i, расстояния S, угла наклона v и высоты визирования υ. [1]
К недостаткам этого способа следует отнести невысокую точность измерения превышений в связи с необходимостью измерения, как правило, с помощью рулетки, высоты инструмента i, и высоты визирования υ.
Целью изобретения является повышение точности и производительности измерений при тригонометрическом нивелировании с использованием электронных тахеометров и осуществления промежуточного контроля измеренных превышений.
Указанная цель достигается тем, что для исключения влияния ошибок, измерения высоты инструмента и высоты визирной цели углы наклона и расстояния до измеряемых точек нивелирного хода измеряются при постоянном значении высоты горизонта инструмента и одинаковой высоте визирной цели, т.е. при неизменном положении отражателя на штанге, при этом превышения между точками нивелирного хода определяются как разность превышений между горизонтом инструмента и горизонтами определяемых точек и осуществляется промежуточный контроль измеренных превышений при прокладке протяженного хода тригонометрического нивелирования.
Сущность изобретения поясняется чертежом на котором представлена принципиальная схема определения превышений между смежными точками тригонометрическим нивелированием с использованием электронных тахеометров и осуществления промежуточного контроля измеренных превышений между ними.
На чертеже показан электронный тахеометр 1т, точки нивелирования 2i и 2i+1, измеряемые расстояния Si и Si+1, измеряемые вертикальные углы vi и vi+1 высота горизонта тахеометра НT, высота горизонта измеряемых точек Hi и Hi+1, превышения hi, hi+1, hi,i+1.
Способ реализуется следующим образом.
Углы наклона и расстояния до измеряемых точек нивелирного хода измеряют при постоянном значении высоты горизонта инструмента Нт и постоянной высоте визирной цели, т.е. при неизменном положении отражателя на штанге, при этом превышения между точками нивелирного хода определяют как разность превышений между горизонтом инструмента Нт и горизонтами определяемых точек Hi, Hi+1 и осуществляют промежуточный контроль измеренных превышений при прокладке протяженного хода тригонометрического нивелирования.
Искомые превышения h между тахеометром 1т и определяемыми точками 2i и 2i+1 равны
hi=Sitgvi+iT-υi,
hi+1=Si+1tgvi+1+iT-υi+1,
где
S - измеренное расстояние,
iT - горизонт тахеометра,
v - угол наклона,
υ - высота визирной цели.
Измерения производят при одном горизонте инструмента и одной высоте вехи отражателя, т.е.
iT = constant
υi=υi+1,
а превышение между точками i и i+1 определяется по формуле
hi, i+1=Sitgvi-Si+1tgvi+1,
где
S - измеренное расстояние.
Источники информации
1. Гиршберг М.А. Геодезия, ч.1 - М.: Недра, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистанционного геометрического нивелирования | 2015 |
|
RU2610049C2 |
| Способ передачи нормальной высоты на остров и устройство для его реализации | 2023 |
|
RU2815616C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2010 |
|
RU2442112C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕВЫШЕНИЙ | 1966 |
|
SU216290A1 |
| Способ горизонтирования системы координат угломерного прибора по двум опорным точкам | 2024 |
|
RU2832842C1 |
| СПОСОБ ГЕОМЕТРИЧЕСКОГО НИВЕЛИРОВАНИЯ | 2002 |
|
RU2213325C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЙ ОПОЛЗНЯ | 2024 |
|
RU2821434C1 |
| Способ совместного определения координат, высот и дирекционных углов направлений | 2022 |
|
RU2798764C1 |
| ГЕОДЕЗИЧЕСКАЯ РЕЙКА | 1992 |
|
RU2031366C1 |
Изобретение относится к области геодезии, в частности к методам определения превышений между измеряемыми точками с использованием электронных тахеометров, и может быть использовано в тригонометрическом нивелировании. Сущность: при прокладке протяженного хода тригонометрического нивелирования инструмент устанавливают с возможностью визирования на ряд точек хода, но не менее 2-х. Визирование осуществляют на все видимые точки хода, но не менее 2-х, при этом визирные цели (отражатели) устанавливают на одной высоте от пятки вешки (рейки). Превышения между точками определяют как разности горизонтов каждой снимаемой точки хода. Технический результат: повышение точности и производительности измерений. 1 ил.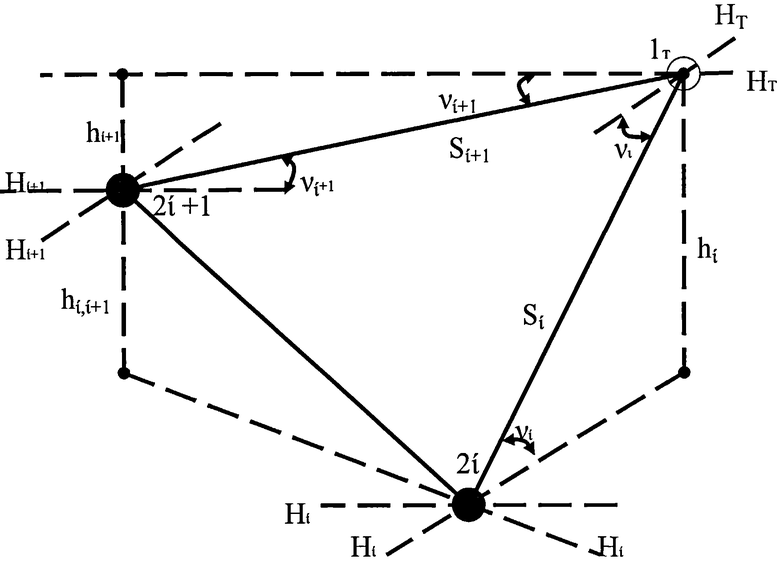
Способ тригонометрического нивелирования для определения превышений точек нивелирного хода с использованием электронного тахеометра, отличающийся тем, что при прокладке протяженного хода тригонометрического нивелирования инструмент устанавливают с возможностью визирования на ряд точек хода, но не менее 2-х, визирование осуществляют на все видимые точки хода, но не менее 2-х, при этом визирные цели (отражатели) устанавливают на одной высоте от пятки вешки (рейки), высота i инструмента не измеряется, а превышения между точками 2i и 2i+1 определяют как разности горизонтов каждой снимаемой точки хода по формуле
hi,i+1=Sitgνi-Si+1tgνi+1, где S - измеренное расстояние.
| СПОСОБ ТРИГОНОМЕТРИЧЕСКОГО НИВЕЛИРОВАНИЯ | 1998 |
|
RU2174672C2 |
| Способ определения высоты точек тригонометрическим нивелированием | 1990 |
|
SU1820213A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЕДИНИЧНОГО ИЗМЕРЕННОГО ПРЕВЫШЕНИЯ ТРИГОНОМЕТРИЧЕСКИМ НИВЕЛИРОВАНИЕМ | 2006 |
|
RU2309383C1 |

