Настоящая заявка на патент испрашивает приоритет предварительной заявки США № 61/073731, озаглавленной "УПРАВЛЕНИЕ ГЕТЕРОДИНОМ ДЛЯ БЕСПРОВОДНЫХ УСТРОЙСТВ, ИМЕЮЩИХ ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ", поданной 18 июня 2008 года, и предварительной заявки США № 61/088667, озаглавленной "УПРАВЛЕНИЕ ГЕТЕРОДИНОМ ДЛЯ БЕСПРОВОДНЫХ УСТРОЙСТВ, ИМЕЮЩИХ ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ", поданной 13 августа 2008 года, обе из которых переуступлены правообладателю настоящей заявки и тем самым явно включены в настоящий документ посредством ссылки.
Область техники
Аспекты раскрытия в общем имеют отношение к беспроводным устройствам, которые имеют функциональные возможности определения позиции и/или навигации, и, в частности, к управлению поведением совместно используемого генератора опорной частоты, используемого различными технологиями в беспроводном устройстве.
Уровень техники
Сети мобильной связи находятся в процессе предложения все более и более сложных возможностей, соответствующих определению местоположения беспроводного устройства. Новые приложения, например, имеющие отношение к повышению персональной производительности, совместным взаимодействиям, общению в социальных сетях и сбору данных, могут использовать информацию географического местоположения для обеспечения новых функциональных возможностей потребителям. Кроме того, некоторые юридические нормативные требования могут обязывать оператора сети сообщать местоположение мобильного терминала, когда мобильный терминал выполняет экстренный вызов, например вызов 911 в Соединенных Штатах.
В цифровой сотовой сети множественного доступа с кодовым разделением (CDMA) возможность определения позиции может быть предоставлена посредством усовершенствованной трилатерации с помощью прямой линии связи (AFLT) - методики, которая вычисляет местоположение беспроводного устройства на основе измеренного времени прибытия радиосигналов беспроводного устройства от базовых станций. Более усовершенствованной методикой является гибридное определение позиции, в котором мобильная станция может использовать приемник системы спутникового позиционирования (SPS), и позиция вычисляется на основе измерений как AFLT, так и SPS.
Приемники SPS включаются в беспроводные устройства, чтобы увеличить точность определения местоположения беспроводного устройства. Приемники SPS могут быть автономными и выполнять все функции обнаружения SPS и вычисления позиции (также известными как автономные), или они могут быть не автономными (также известными, как использующие помощь беспроводной сети) и полагаться на другие технологии беспроводной сети для обеспечения данных обнаружения SPS и, возможно, выполнения вычисления позиции.
В беспроводных устройствах, имеющих и систему беспроводной связи, и систему SPS, может стать рентабельным совместное использование компонентов системы, которые могут использоваться обеими системами. Например, такие системы могут совместно использовать генератор опорной частоты, такой как настраиваемый генератор опорной частоты и/или не настраиваемый генератор опорной частоты, для обеспечения опорных частот. Совместное использование таких компонентов может уменьшить стоимость, сложность, размер, вес и потребляемую мощность.
Однако совместное использование компонентов может повлечь за собой некоторые компромиссы в производительности и/или функциональности для уменьшения сложности работы. Например, текущие беспроводные устройства могут разрешить разделенное управление частотой только на основе производительности системы связи, но не специально для производительности системы SPS.
Точность определения позиции устройства беспроводной связи может быть негативно затронута посредством частотных смещений, которые, в свою очередь, могут затронуть оценки допплеровского эффекта системы SPS и измерения допплеровского эффекта системы SPS, проводимые беспроводным устройством. Большие неучтенные частотные смещения могут препятствовать обнаружению беспроводным устройством спутников. Большие неучтенные частотные смещения также могут привести к низкому качеству измерений допплеровского эффекта системы SPS, что также может неблагоприятно воздействовать на точность позиции, вследствие отрицательного воздействия на определение измерения кодовой фазы SPS.
Главный вклад в сложность, соответствующую поиску и обнаружению спутникового сигнала, вносит погрешность частоты, обусловленная гетеродином (LO) приемника. Гетеродин используется в приемнике для преобразования с понижением частоты принятого сигнала в сигнал основного диапазона. Затем сигнал основного диапазона обрабатывается. В случае сигнала, принятого от спутника SPS, сигнал основного диапазона коррелируется со всеми возможными псевдослучайными кодами для определения, какой спутник передал сигнал, и определения времени прибытия сигнала. Процесс поиска и обнаружения очень осложняется посредством ошибки частоты гетеродина. Любая погрешность частоты, внесенная гетеродином, создает дополнительную область поиска, которая обычно должна покрываться. Кроме того, ошибка частоты гетеродина представляет отдельную размерность, по которой может выполняться поиск времени прибытия. Таким образом, область поиска увеличивается пропорционально погрешности частоты, поскольку время поиска прибытия может быть проведено по всем возможным погрешностям частоты. Многие параметры способствуют действительной или воспринимаемой ошибке частоты гетеродина. Рабочая температура схемы, а также температурный градиент по схемной плате оказывают воздействие на частоту гетеродина. Кроме того, стабильность частоты генератора опорной частоты, используемого для формирования гетеродина, вносит непосредственный вклад в стабильность частоты гетеродина.
В соответствии с этим было бы выгодно использовать единый подход к управлению частотой для уменьшения ошибки частоты гетеродина, чтобы сократить область поиска, покрываемую при обработке сигнала основного диапазона. Сокращение области поиска дает возможность более низкой сложности поиска, что, в свою очередь, дает возможность большей чувствительности приемника и уменьшения времени поиска и обнаружения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Иллюстративные аспекты изобретения направлены на устройства и способы управления генератором опорной частоты для беспроводных устройств, имеющих функциональные возможности определения позиции. В одном аспекте раскрытия способ содержит этап, на котором выбирают параметры генератора опорной частоты, соответствующие наименьшей ошибке генератора опорной частоты, причем выбор основан на параметрах генератора опорной частоты, полученных с использованием различных технологий в пределах беспроводного устройства. Способ дополнительно содержит этапы, на которых обнаруживают спутник на основе выбранных параметров генератора опорной частоты и вычисляют позицию с помощью спутника. Способ дополнительно содержит этапы, на которых определяют качество определения позиции с помощью спутника и обновляют параметры генератора опорной частоты на основе качества определения позиции с помощью спутника.
В другом аспекте генератор опорной частоты может представлять собой настраиваемый генератор опорной частоты, такой как управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO) или управляемый напряжением кварцевый генератор (VCXO), или ненастраиваемый генератор колебаний (генератор свободных колебаний), такой как кварцевый генератор с температурной компенсацией (TCXO) или кварцевый генератор (XO).
В другом аспекте раскрытия представлено беспроводное устройство, имеющее функциональные возможности определения позиции, которое управляет генератором опорной частоты, использующее множество технологий. Беспроводное устройство может содержать систему беспроводной связи, приемник системы спутникового позиционирования (SPS), генератор опорной частоты, соединенный с системой беспроводной связи и приемником SPS. Устройство дополнительно может содержать мобильный контроллер, соединенный с генератором опорной частоты, системой SPS и системой беспроводной связи. Устройство может дополнительно содержать память, соединенную с мобильным контроллером, причем память хранит таблицу параметров генератора опорной частоты и команды, заставляющие мобильный контроллер: выбирать параметры генератора опорной частоты, соответствующие наименьшей ошибке генератора опорной частоты, причем выбор основан на параметрах генератора опорной частоты, полученных с использованием различных технологий в пределах беспроводного устройства, обнаруживать спутник на основе выбранных параметров генератора опорной частоты, вычислять позицию с помощью спутника, определять качество определения позиции с помощью спутника и обновлять параметры гетеродина на основе качества определения позиции с помощью спутника.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи представлены, чтобы помочь в описании аспектов изобретения, и предоставлены исключительно для иллюстрации этих аспектов, а не их ограничения.
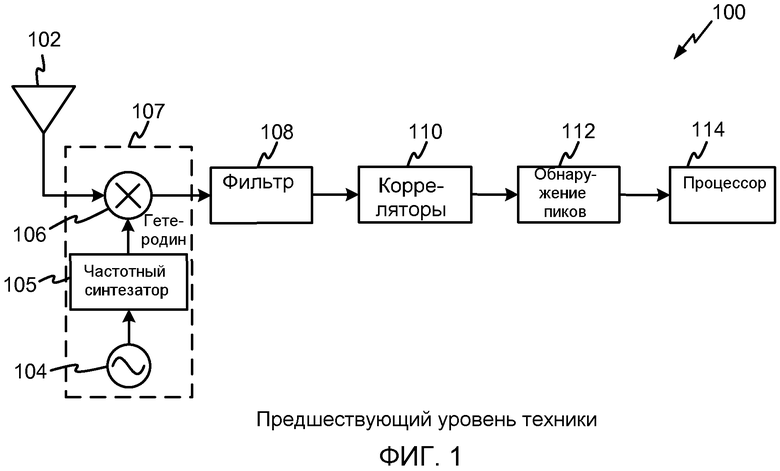
Фиг. 1 - блок-схема верхнего уровня иллюстративного приемника SPS.
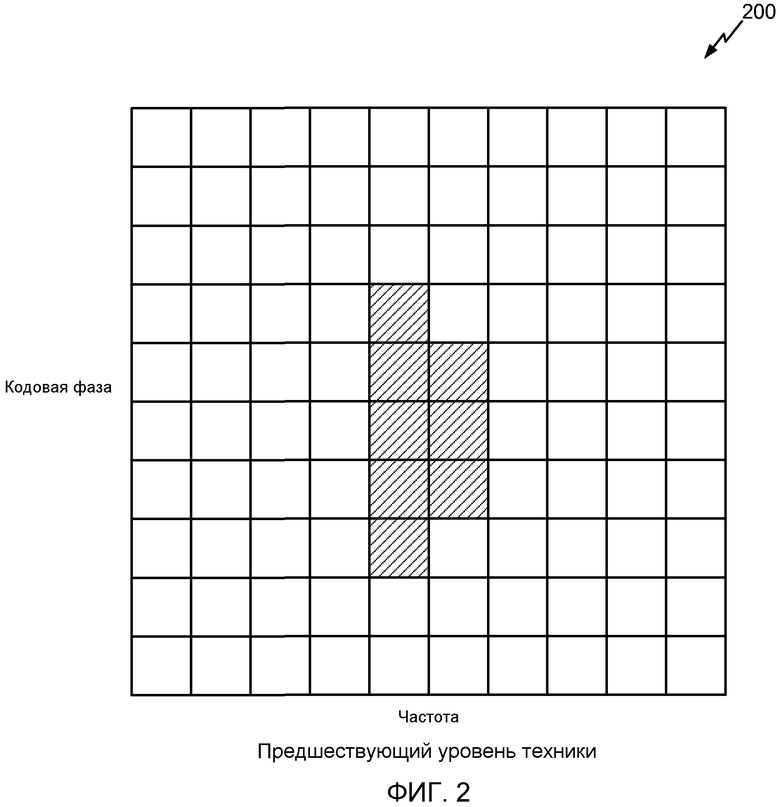
Фиг. 2 - схема, представляющая иллюстративную область кодовой фазы/частоты, в которой выполняется поиск посредством приемника SPS для обнаружения спутника.
Фиг. 3 - блок-схема иллюстративной беспроводной связи и устройства позиционирования, которое использует пассивную коррекцию частотного смещения для приемника SPS.
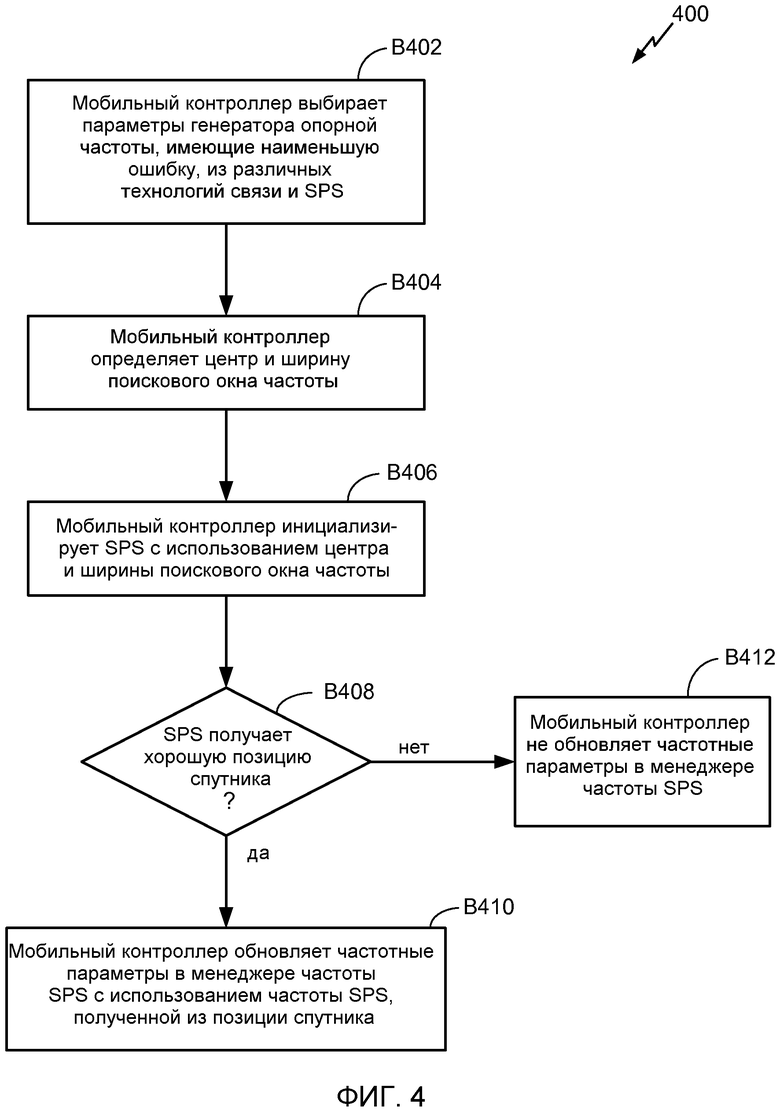
Фиг. 4 - схема последовательности операций верхнего уровня, показывающая иллюстративный процесс для выполнения пассивной коррекции частотного смещения для приемника SPS.
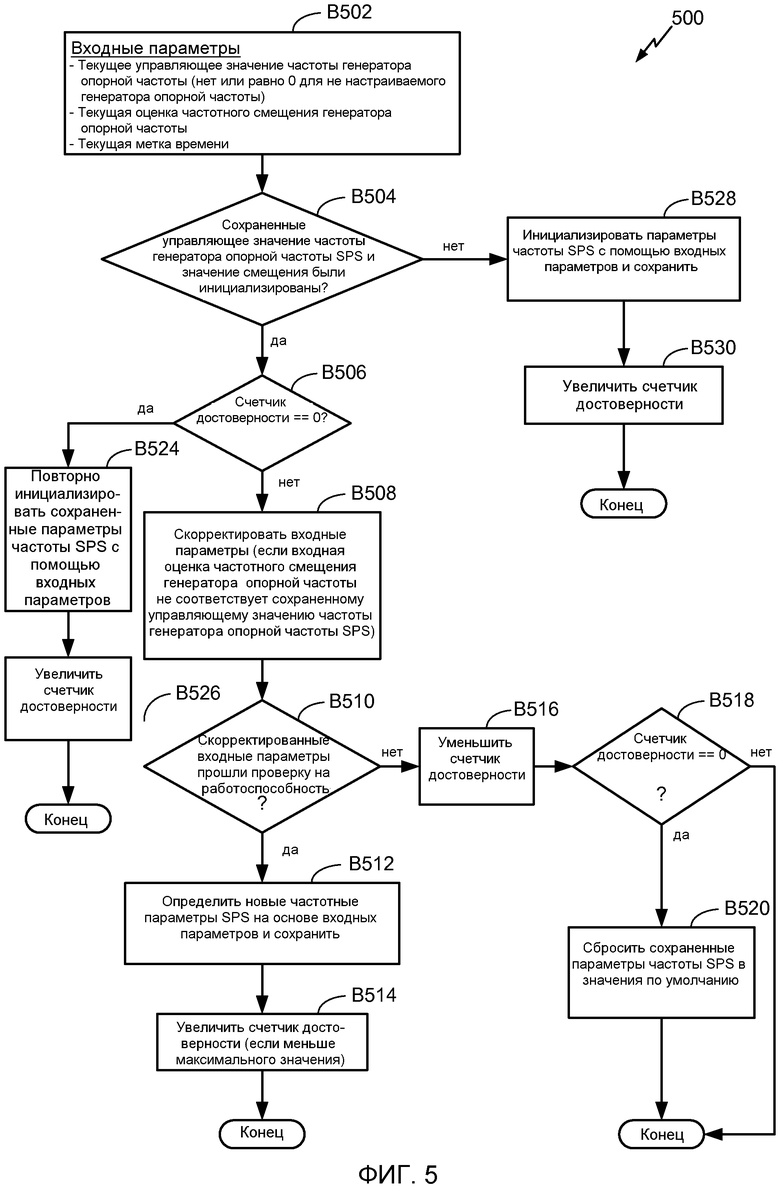
Фиг. 5 - схема последовательности операций, показывающая иллюстративный процесс для обновления параметров частотного смещения для пассивной коррекции для приемника SPS.
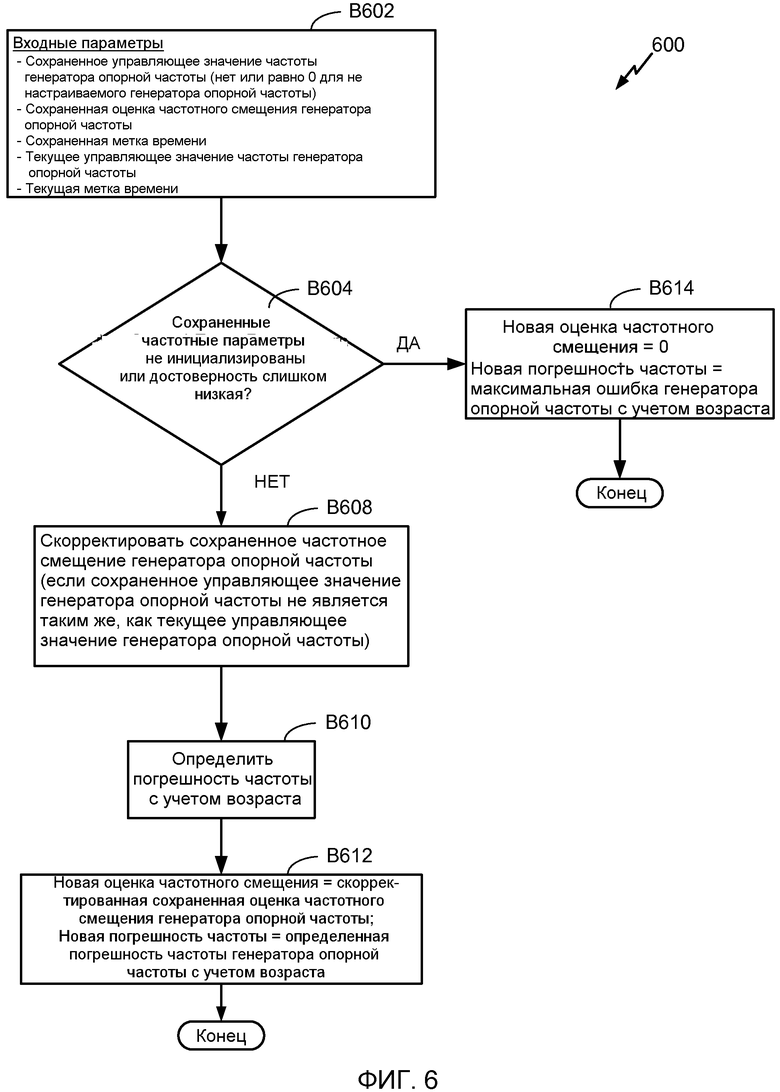
Фиг. 6 - схема последовательности операций, показывающая иллюстративный процесс для получения частотного смещения и определения его соответствующей погрешности частоты для пассивной коррекции для приемника SPS.
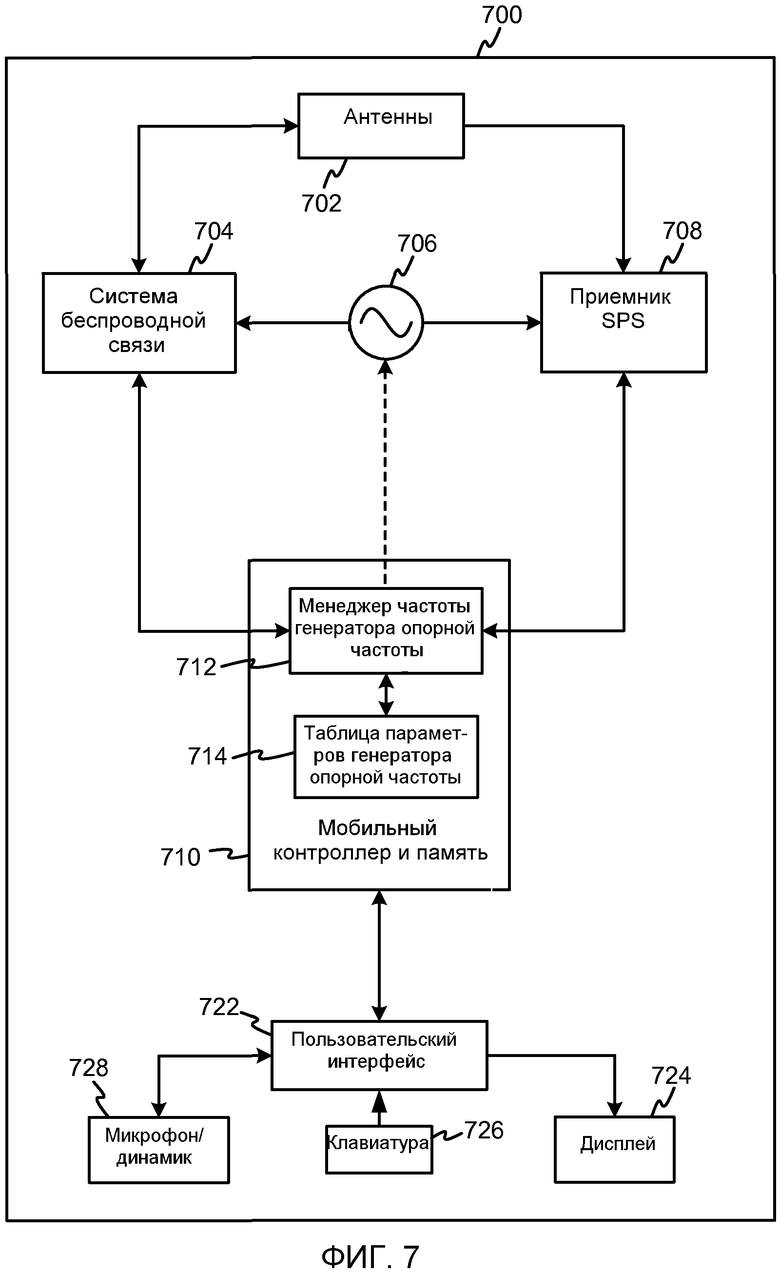
Фиг. 7 - блок-схема иллюстративной беспроводной связи и устройства позиционирования, которое использует коррекцию частотного смещения для всего беспроводного устройства.
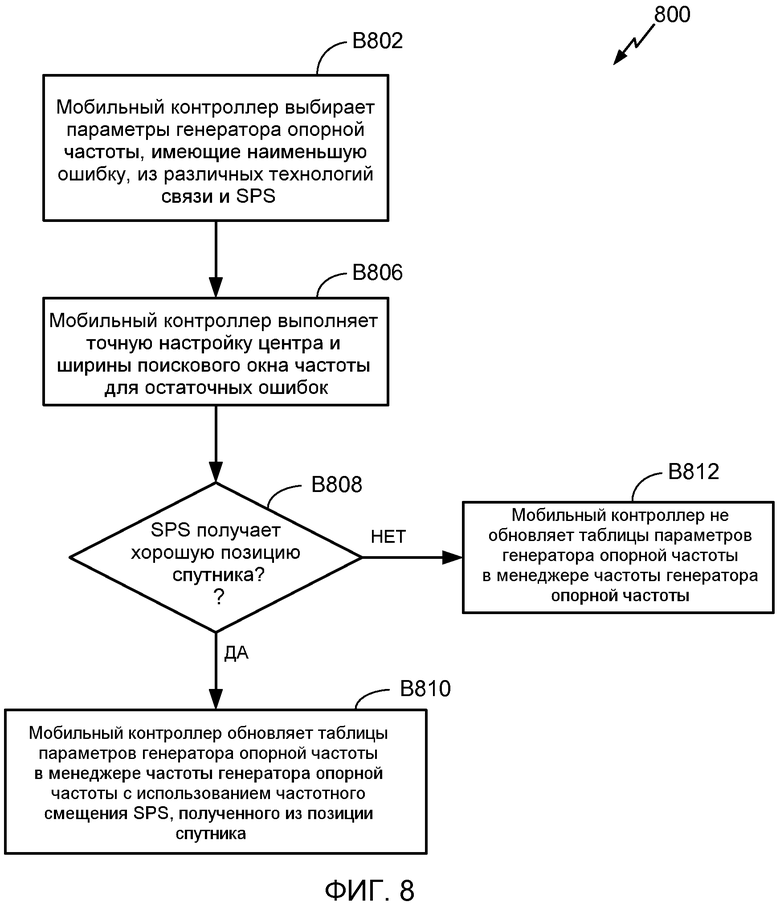
Фиг. 8 - схема последовательности операций верхнего уровня, показывающая иллюстративный процесс для выполнения коррекции частотного смещения для всего беспроводного устройства
ПОДРОБНОЕ ОПИСАНИЕ
Аспекты изобретения раскрываются в последующем описании и соответствующих чертежах, направленных на конкретные аспекты изобретения. Дополнительные аспекты могут быть разработаны без отступления от объема изобретения. Кроме того, известные элементы изобретения не будут описываться подробно или будут опущены, чтобы не затруднять понимание значимых подробностей изобретения.
Слово "иллюстративный" используется здесь для обозначения "служащий примером, экземпляром или иллюстрацией". Любой аспект изобретения, описанный здесь как "иллюстративный", не должен обязательно рассматриваться как предпочтительный или имеющий преимущество по сравнению с другими аспектами. Аналогичным образом, термин "аспекты изобретения" не требует, чтобы все аспекты изобретения включали обсуждаемый отличительный признак, преимущество или принцип работы.
Используемая здесь терминология предназначена только для описания конкретных аспектов и не предназначена для ограничения аспектов изобретения. Подразумевается, что используемые здесь формы единственного числа включают в себя также формы множественного числа, если контекст ясно не указывает иначе. Далее будет подразумеваться, что термины "содержит", "содержащий", "включает в себя" и/или "включающий в себя" при использовании в этом документе определяют наличие изложенных отличительных признаков, чисел, этапов, операций, элементов и/или компонентов, но не препятствуют наличию или добавлению одного или более других отличительных признаков, чисел, этапов, операций, элементов и/или компонентов и/или их групп.
Кроме того, многие аспекты описываются в терминах последовательностей действий, которые должны быть выполнены, например, посредством элементов вычислительного устройства. Будет понятно, что различные описанные здесь действия могут быть выполнены посредством специализированных схем (например, специализированных интегральных схем (ASIC)), посредством программных команд, исполняемых одним или более процессорами, или посредством их комбинации. Кроме того, эти описанные здесь последовательности действий могут рассматриваться как воплощенные полностью в пределах машиночитаемого носителя данных любого вида, хранящего соответствующее множество компьютерных команд, которые при исполнении заставляют соответствующий процессор выполнять описанные здесь функции. Таким образом, различные аспекты изобретения могут быть воплощены во многих различных формах, все из которых рассматриваются как находящиеся в пределах объема заявленного предмета. Кроме того, для каждого из описанных здесь аспектов соответствующая форма любых таких аспектов может быть описана здесь, например, как "логическая схема, выполненная с возможностью" выполнять описанное действие.
Фиг. 1 является блок-схемой верхнего уровня иллюстративного приемника спутниковой системы позиционирования (SPS), показывающий только основные функциональные компоненты для упрощения описания. Антенна 102 может служить в качестве интерфейса между сигналами вещания и приемником 100. Антенна 102 может быть настроена для оптимального приема сигналов, переданных в L-диапазоне, когда приемник 100 выполнен как приемник SPS. В случае приемника SPS источником сигналов вещания может являться совокупность спутников SPS, вращающихся вокруг Земли.
Используемый здесь термин "спутниковая система позиционирования" может охватывать систему глобального позиционирования (GPS), европейскую систему Galileo, российскую систему GLONASS, систему NAVSTAR, систему GNSS, систему, которая использует спутники от комбинации этих систем, или любую другую текущую спутниковую систему позиционирования или любую систему SPS, которая может быть разработана в будущем. Кроме того, термин "спутниковая система позиционирования" также может включать в себя псевдоспутниковые системы позиционирования или системы, использующие комбинацию псевдоспутников и спутников. Псевдоспутники могут быть определены как наземные передатчики, которые передают код PN или другой код определения дальности (подобный сотовым сигналам GPS или CDMA, модулированным на несущем сигнале).
Сигналы SPS, принятые антенной 102, могут быть поданы на преобразователь 107 с понижением частоты. Преобразователь 107 с понижением частоты служит для преобразования с понижением частоты радиочастотных сигналов, принятых антенной 102, в сигналы основного диапазона, которые затем обрабатываются. Основными компонентами преобразователя 107 с понижением частоты являются смеситель 106 и сигнал гетеродина (LO), сформированный с помощью частотного синтезатора 105 из генератора 104 опорной частоты. Принятый сигнал подается от антенны 102 на смеситель 106 в пределах преобразователя 107 с понижением частоты. Фильтрация или усиление сигнала в преобразователе 107 с понижением частоты не показаны для упрощения блок-схемы до ее функциональных компонентов. Смеситель 106 действует для эффективного умножения принятого сигнала на сигнал гетеродина, сформированный с помощью частотного синтезатора 105 от генератора 104 опорной частоты. Полученный в результате выходной сигнал от смесителя 106 центрирован на двух первичных частотах. Один частотный компонент выходного сигнала смесителя 106 центрирован на сумме центральной частоты принятого сигнала и рабочей частоты гетеродина. Второй частотный компонент выходного сигнала смесителя 106 центрирован на разности между центральной частотой принятого сигнала и рабочей частотой гетеродина. Выходной сигнал преобразователя 107 с понижением частоты может быть подан на фильтр 108 для удаления компонента паразитной частоты из смесителя 106 и для предварительной обработки сигнала преобразователя с понижением частоты перед последующей обработкой сигнала.
Отфильтрованный сигнал может быть подан на банк корреляторов 110. Корреляторы 110 используют методики цифровой обработки сигналов для обработки от фильтрованных сигналов. Корреляторы переводят сигнал в цифровую форму с использованием аналого-цифровых преобразователей (ADC; АЦП) для обеспечения возможности цифровой обработки сигналов. Корреляторы 110 могут использоваться для определения сдвига кодовой фазы принятых спутниковых сигналов, когда приемник 100 выполнен для определения позиции в системе SPS. Приемник 100 может не иметь предварительной информации относительно своей позиции, когда он первоначально включается. Приемник 100 определяет свою начальную позицию посредством поиска среди всех возможных кодовых последовательностей псевдослучайных чисел (PN), переданных каждым спутником. Кроме того, приемник 100 может выполнить поиск среди всех возможных фаз всех возможных кодов PN. Поиск может быть выполнен посредством нескольких корреляторов, работающих параллельно, чтобы уменьшить время поиска, используемое приемником 100. Каждый коррелятор работает с отдельной последовательностью PN. Коррелятор пытается определить смещение фазы внутренним образом формированного кода PN с кодом, принятым от спутника. Коды PN, которые не соответствуют спутниковому сигналу, могут не иметь существенной корреляции вследствие случайной природы кодов PN. Кроме того, правильный код PN может не иметь существенной корреляции с принятым сигналом, если фазы двух кодовых сигналов не выровнены. Таким образом, корреляторы 110 могут обеспечить только показание относительно корреляции в корреляторе, имеющем тот же самый псевдослучайный код, как и принятый сигнал, когда кодовые фазы двух сигналов выровнены.
Результаты коррелятора затем могут быть поданы на процессор 112 обнаружения пиков. Множество корреляторов работают параллельно и одновременно выдают результаты процессору 112 обнаружения пиков, который может определить наиболее вероятные псевдослучайные коды и смещения кодовых фаз для принятого сигнала.
Система SPS использует ортогональные коды для каждого из спутников. Это позволяет всем спутникам одновременно выполнять передачи на одной и той же частоте. Таким образом, приемнику одновременно предоставляется информация из нескольких источников. Несколько корреляторов 110 работают независимо друг от друга и могут определить фазу принятого кода PN в присутствии других ортогональных кодов. Поэтому процессору 112 обнаружения пиков одновременно предоставляются числа корреляции, идентифицирующие несколько кодов PN и смещение фазы для этих кодов. Поскольку каждому спутнику назначен код PN, идентификация псевдослучайного кода идентифицирует конкретный спутник как его источник. Кроме того, определение смещения кодовой фазы определяет время прибытия этого сигнала. Процессор 114 анализирует информацию в процессоре 112 обнаружения пиков для вычисления позиции приемника. Одновременное определение кода PN и смещений кодовой фазы позволяет процессору 114 делать оценку позиции приемника по мере обновления процессора 112 обнаружения пиков.
Однако процесс поиска является сложным, если частота гетеродина в пределах преобразователя 107 с понижением частоты является неточной. Дополнительный источник погрешности частоты представляет собой эффект допплеровского смещения, обусловленный скоростью приемника. Даже в ситуации, когда гетеродин приемника является совершенно точным, может испытываться погрешность частоты из-за эффекта допплеровского смещения. Смещение может вызвать либо заметное увеличение, либо заметное уменьшение частоты спутниковой передачи. Хотя и спутник, и гетеродин приемника могут быть совершенно устойчивыми, сигнал в приемнике сдвигается по частоте. Если допплеровское смещение, внесенное движением приемника, не корректируется в приемнике, это может содействовать какой-либо погрешности частоты, уже имеющейся в приемнике.
Фиг. 2 является схемой, представляющей иллюстративную область 200 фазы PN-кода/частоты, в которой выполняется поиск посредством приемника SPS для обнаружения спутника. Ошибки точности частоты гетеродина усложняют процесс поиска. Каждый коррелятор в приемнике SPS может выполнять поиск среди всех возможных кодовых фаз. Область поиска кодовых фаз показана как вертикальная область поиска на фиг. 2. Каждая ячейка в области поиска кодовой фазы представляет наименьшую различимую разность кодовых фаз. Короткая длина псевдослучайного кода, используемая для системы SPS, может составлять 1023 бита. Поэтому по меньшей мере 1023 ячейки могут использоваться в области поиска кодовой фазы для однозначной идентификации фазы псевдослучайного кода.
Из фиг.2 можно заметить, что увеличение частотной области поиска пропорционально увеличивает всю область поиска 200. Частотная область поиска представляет дополнительную размерность поиска, так как погрешность частоты может являться взаимоисключающей с какой-либо погрешностью кодовой фазы. В одном аспекте каждая ячейка в частотной области поиска может представлять минимальный различимый частотный промежуток. Размер минимального различимого частотного промежутка является функцией от количества полного времени когерентного накопления. Минимальный различимый частотный промежуток уменьшается по мере увеличения полного времени когерентного накопления. Кроме того, достаточное количество частотных ячеек используются для достижения желаемой частотной области поиска. Увеличение неучитываемого смещения и/или отклонения гетеродина обычно требует увеличенной частотной области поиска.
Приемник коррелирует отсчеты в пределах каждой ячейки, заданной в полной области поиска 200. Последовательные результаты накапливаются для дополнительного улучшения отношения сигнала к шуму (SNR) принятого сигнала. Отклонение гетеродина приводит к тому, что результаты накопления появляются в нескольких ячейках, соответствующих отклонению частоты. Это "смазывание" сигнала показано на фиг. 2 как затенение в нескольких частотных ячейках. Гетеродин, который не обнаруживает отклонения, дает возможность появления результатов накопления в одной единственной частотной ячейке. Это может очень сильно улучшить идентификацию сигнала через увеличение отношения SNR.
Ошибки в точности частоты гетеродина, которые, как ожидается, будут доминировать над всеми другими, представляют собой ошибки гетеродина вследствие нестабильности частоты совместно используемого генератора опорной частоты. Эти ошибки будут являться распространенными во всех системах беспроводной связи и системах SPS в беспроводном устройстве, которые совместно используют генератор опорной частоты.
В различных аспектах раскрытия представлены устройства и способы обеспечения единого подхода для эффективного управления погрешностями частоты гетеродина через эффективное управление смещениями частоты генератора опорной частоты, эффектами старения и погрешностями для систем определения позиции, используемых в устройствах беспроводной связи. Эти подходы могут хранить различные параметры генератора колебаний, соответствующие системе определения позиции, в энергонезависимой памяти. Эти параметры могут обновляться и улучшаться при последовательных обнаружениях спутников и успешных определениях местоположения и использоваться позже для уменьшения времени, используемого для последующих обнаружений спутников и определений местоположения каждый раз, когда система SPS инициализируется. В некоторых аспектах эти сохраненные параметры могут использоваться в программном обеспечении для изменения частотного поискового окна. В других аспектах эти параметры могут использоваться непосредственно для настройки генератора опорной частоты беспроводного устройства, что может устранить потребность изменять частотное поисковое окно в программном обеспечении. В других аспектах представлены устройства и способы обеспечения подхода для эффективного управления погрешностями частоты гетеродина через управление смещениями частоты генератора опорной частоты, эффектами старения и/или погрешностями для автономных систем определения позиции, таких как, например, автономные приемники GNSS, автономные устройства PND и т.д.
Фиг. 3 является блок-схемой иллюстративного беспроводного устройства 300, которое включает в себя систему беспроводной связи и систему определения позиции, использующую пассивную коррекцию частотного смещения для приемника спутниковой системы позиционирования.
Используемый здесь термин "беспроводное устройство" может относиться к устройству беспроводной связи любого типа, которое может передавать информацию по сети и иметь функциональную возможность определения позиции и/или навигации. Беспроводное устройство может представлять собой любой сотовый мобильный терминал, устройство системы персональной связи (PCS), персональное навигационное устройство, переносной компьютер, карманный персональный компьютер или любое другое подходящее мобильное устройство, способное к приему и обработке сигналов сети и/или системы SPS.
Кроме того, используемый здесь термин "сеть" может относиться к любой сети беспроводной связи, в том числе к беспроводной глобальной сети (WWAN), беспроводной локальной сети (беспроводная локальная сеть), беспроводная персональная сеть (WPAN), и так далее. Сеть WWAN может являться сетью множественного доступа с кодовым разделением (CDMA), сетью множественного доступа с временным разделением (TDMA), сетью множественного доступа с частотным разделением (FDMA), сетью множественного доступа с ортогональным частотным разделением (OFDMA), сетью множественного доступа с частотным разделением с одной несущей (SC-FDMA) и так далее. Сеть CDMA может реализовать одну или более технологий беспроводного доступа (RAT), такие как CDMA2000, широкополосный доступ CDMA (W-CDMA) и так далее. Технология CDMA2000 включает в себя стандарты IS- 95, IS-2000, IS-2000 EV-DO и IS-856. Сеть TDMA может реализовать глобальную систему связи (GSM), цифровую усовершенствованную телефонную систему (D-AMPS) или некоторую другую технологию RAT. Технологии GSM и W-CDMA описываются в документах консорциума, называемого "Проект партнерства по созданию сетей третьего поколения (3GPP)". Технология CDMA2000 описывается в документах консорциума, называемого "Проект-2 партнерства по созданию сетей третьего поколения (3GPP2). Документы проектов 3GPP и 3GPP2 являются общедоступными. Сеть WLAN может представлять собой сеть стандарта IEEE 802.11x, и сеть WPAN может представлять собой сеть технологии Bluetooth, стандарта IEEE 802.15x или сеть некоторого другого типа. Методики также могут использоваться для любой комбинации сетей WWAN, WLAN и/или WPAN.
Наконец, используемый здесь термин "пассивные" коррекции может относиться к коррекциям частотного смещения, которые не применяются непосредственно для настройки (или "обучения") совместно используемого генератора опорной частоты. Вместо этого в режиме пассивной коррекции такие коррекции могут применяться к другим частям системы, которые могут находиться ниже по потоку от места, где используется гетеродин, полученный из генератора опорной частоты. В аспекте, показанном на фиг. 3, коррекции могут быть применены в программном обеспечении после того, как гетеродин был использован для преобразования с понижением частоты принятого сигнала RP. Такие пассивные коррекции могут иметь преимущество по сокращению воздействия реализованных коррекций в существующих беспроводных устройствах.
Беспроводное устройство 300 может включать в себя систему 304 беспроводной связи, которая может быть соединена с одной или более антеннами 302. Система 304 беспроводной связи содержит подходящие устройства, аппаратное оборудование и/или программное обеспечение для взаимодействия с беспроводными базовыми станциями и/или обнаружения сигналов к ним или от них, и/или непосредственно с другими беспроводными устройствами в сети. Система беспроводной связи может включать в себя модули передатчика/приемника, которые используют внешний совместно используемый генератор 306 опорной частоты для формирования сигнала гетеродина (LO), который обеспечивает возможность точного преобразования с повышением/понижением частоты (например, перенос по частоте) для переданных/принятых сигналов связи.
В одном аспекте система 304 беспроводной связи может содержать систему связи CDMA, подходящую для взаимодействия с сетью CDMA беспроводных базовых станций; однако в других аспектах система беспроводной связи может содержать сотовую сеть телефонной связи другого типа, такую как, например, TDMA или GSM. Кроме того, могут использоваться технологии беспроводных сетей любого другого типа, например Wi-Fi (802.11x), WiMax и т.д.
Система 310 управления мобильной связью (MC) может быть соединена с системой 304 беспроводной связи и может включать в себя микропроцессор, который обеспечивает стандартные функции обработки, а также другие функциональные возможности вычисления и управления. Система 310 MC может также включать в себя встроенную память для хранения данных и программных команд для исполнения запрограммированных функциональных возможностей в беспроводном устройстве 300. Система 310 MC может дополнительно использовать внешнюю память (не показана) для дополнительного хранения. Функциональные возможности программного обеспечения, соответствующие аспектам раскрытия, будут более подробно описаны ниже.
Система определения позиции может быть обеспечена в беспроводном устройстве 300. В одном аспекте система определения позиции может включать в себя приемник 308 SPS. Приемник 308 SPS может быть соединен с одной или более антеннами 302, системой 310 MC и генератором 306 опорной частоты и содержать любое подходящее аппаратное оборудование и/или программное обеспечение для приема и обработки сигналов SPS. Приемник 308 SPS при необходимости запрашивает информацию и операции от других систем и выполняет вычисления, необходимые для определения позиции беспроводного устройства, с использованием измерений, полученных посредством любого подходящего алгоритма AFLT, алгоритма SPS или комбинации алгоритмов AFLT и SPS (A-SPS).
Приемник 308 SPS может использовать тот же самый генератор 306 опорной частоты для обработки принятых сигналов SPS, который используется для обработки сигналов для системы 304 беспроводной связи. Наличие совместно используемого генератора опорной частоты может обеспечить преимущества по увеличению эффективности мощности и уменьшению стоимости беспроводного устройства 300. Чтобы согласовать каждую систему в пределах беспроводного устройства 300, которые могут иметь отличающиеся требования по частотам, каждая система может формировать свой собственный сигнал гетеродина (LO) на необходимой частоте из совместно используемого генератора 306 опорной частоты. В качестве примера, для одновременного приема сигнала SPS и приема/передачи сигналов беспроводной связи приемник 308 SPS и система 304 беспроводной связи может использовать отдельные частотные синтезаторы для формирования сигналов гетеродина (LO) с разными частотами, как требуется для каждой системы.
Генератор 306 опорной частоты может представлять собой настраиваемый генератор опорной частоты, такой как управляемый напряжением кварцевый генератор (VCCO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO), в которых частота колебаний может управляться напряжением или, как в этом аспекте, цифровым значением управления напряжением. Кроме того, нежелательные изменения частоты колебаний вследствие температуры (и/или других источников ошибок) могут быть непосредственно компенсированы через настройку генератора опорной частоты для улучшения точности. Такие ошибки и их соответствующие компенсации более подробно описаны ниже. В другом аспекте генератор 306 опорной частоты может представлять собой не настраиваемый гетеродин (генератор свободных колебаний), такой как кварцевый генератор (XO) или кварцевый генератор с температурной компенсацией (TCXO). Нежелательные изменения частоты колебаний вследствие температуры (и/или других источников ошибки) могут быть компенсированы через коррекции, примененные в каждой индивидуальной системе на плате беспроводного устройства, такого как приемник 308 SPS и/или системы 304 беспроводной связи, расположенные ниже по потоку от гетеродина каждой системы. Пользовательский интерфейс 322 включает в себя любые подходящие интерфейсные системы, такие как микрофон/динамик 328, клавиатура 326 и дисплей 324, которые дают возможность взаимодействия пользователя с мобильным устройством 300. Микрофон/динамик 328 обеспечивает голосовые службы связи с использованием системы 304 беспроводной связи. Клавиатура 326 содержит любые подходящие кнопки для пользовательского ввода. Дисплей 324 содержит любой подходящий дисплей, например жидкокристаллический дисплей с задней подсветкой.
Несколько программных модулей и таблиц данных могут находиться в памяти и быть использованы системой 310 MC, чтобы управлять ошибками и смещениями в генераторе опорной частоты, когда система 304 беспроводной связи или приемник 308 SPS инициализируются. Для системы беспроводной связи менеджер 312 частоты генератора опорной частоты может использоваться для обеспечения множества оценок частотного смещения/ошибок, которые могут быть основаны на предыдущем состоянии системы, температуре и/или возрасте генератора опорной частоты. Эти оценки обычно могут иметь разные точности, которые могут быть измерены в частях на миллион (ppm); и частотные смещения/ошибки, и соответствующие погрешности могут быть сохранены в таблице 314 частотных параметров генератора опорной частоты. Когда система беспроводной связи инициализируется, менеджер 312 частоты генератора опорной частоты может выбрать оценку частотного смещения, которая имеет наименьшую соответствующую ошибку, из таблицы 314 частотных параметров генератора опорной частоты. В аспекте изобретения, когда генератор 306 опорной частоты является настраиваемым, эта оценка частотного смещения может затем быть использована для непосредственной настройки генератора 306 опорной частоты, с тем чтобы он мог должным образом обнаруживать и принимать/передавать сигналы для системы беспроводной связи. В другом аспекте, когда генератор 306 опорной частоты является не настраиваемым, оценка частотного смещения из таблицы 314 частотных параметров генератора опорной частоты может использоваться в другом месте в системах беспроводной связи, чтобы должным образом модулировать/демодулировать сигналы. Например, менеджер 312 частоты генератора опорной частоты может использовать эти элементы для установки начального центра и ширины частотного окна для обнаружения сигнала беспроводной связи.
Значения оценки частотного смещения, которые сохранены в таблице 314 параметров генератора опорной частоты, могут включать в себя жестко заданные значения по умолчанию, предоставленные изготовителями, когда генератор опорной частоты выполнен для определения "хорошего качества" используемого генератора опорной частоты; значения, помещенные в устройство от оператора сети (которые могут изменяться по точности в зависимости от типа сети, например, CDMA, WCDMA, GSM, 1x, 1xEVDO); значения, основанные на измеренной температуре и/или возрасте генератора опорной частоты, и значения, основанные на значении "последней хорошей системы" (RGS), полученные после того, как система беспроводной связи захватывает несущую частоту поставщика услуг. Значение RGS может быть уточнено и сохранено, поскольку во время работы система 304 беспроводной связи может использовать циклы отслеживания частоты для определения сдвигов несущей частоты. Более новые значения могут быть сохранены как значение "последней хорошей системы" в таблице 314 параметров генератора опорной частоты.
Во время инициализации приемника SPS менеджер 316 частоты SPS может получить оценки частотного смещения, которые имеют наименьшую соответствующую ошибку, из таблицы (314) параметров генератора опорной частоты и из таблицы (317) частотных параметров SPS и используют эти элементы для обнаружения спутников. Например, менеджер (316) частоты SPS может использовать эти элементы для установки начального центра и ширины частотного окна для обнаружения спутников. Как только приемник SPS инициализирован, менеджер 316 частоты SPS может определить по меньшей мере одно значение частотного смещения SPS, соответствующее определению позиции на основе последнего хорошего спутника. Это значение затем может быть сохранено в таблице 317 частотных параметров SPS и использоваться для последующей инициализации в отсутствие оценок частотного смещения лучшего качества (например, с меньшей погрешностью) из таблицы (314) параметров генератора опорной частоты. Благодаря сохраненной информации последнего хорошего определения местоположения период времени для обнаружения спутника и получения позиции при последующей инициализации может быть уменьшен. Аспект, показанный на фиг. 3, является пассивным с точки зрения приемника SPS, и сохраненные значения частотного смещения SPS могут использоваться для вычисления центра и ширины для окна, используемого для поиска центральной частоты сигнала SPS, который используется приемником 308 SPS. В этом аспекте сохраненные значения смещения из таблицы (317) частотных параметров SPS не используются менеджером (312) частоты генератора опорной частоты для обучения генератора 306 опорной частоты. Кроме того, значения смещения, сохраненные в таблице 317 частотных параметров SPS, не используются менеджером 312 генератора опорной частоты для коррекции ошибок генератора опорной частоты, чтобы способствовать модуляции/демодуляции сигналов беспроводной связи. Кроме того, в этом аспекте только приемник SPS использует эту частотную информацию; никакая другая система в телефоне (например, какая-либо система беспроводной связи) не используют эту информацию.
Менеджер частот SPS включает в себя программные модули для определения оценки частотного смещения SPS (318) и обновления оценки смещения SPS (320) для хранения в таблице 317 частотных параметров SPS. Эти программные модули будут описаны подробно ниже c использованием блок-схем последовательности операций, показанных на фиг. 5 и 6.
Программное обеспечение и значения частотного смещения генератора опорной частоты SP могут быть сохранены в энергонезависимой памяти, которая может быть на плате системы 310 MC, однако в других аспектах эта память может находиться на отдельном пакете микросхем. В дополнение к оценке частотного смещения другие параметры, такие как погрешность частоты, могут использоваться для вычисления центра и/или ширины частотного поискового окна. Сохраненные элементы могут использоваться вместе с простыми алгоритмами для обновления значений в таблице 317 частотных параметров SPS для последующего использования системой 310 MC.
Как будет описано в других аспектах (показанных на фиг. 7-8), информация, определенная для SPS, может принести пользу другим технологиям, используемым в системе беспроводной связи, а также быть полезной для улучшения времени обнаружения навигационных спутников.
Хотя на фиг. 3 показана только одна система 304 беспроводной связи, будет понятно, что в других аспектах изобретения может использоваться более одной системы беспроводной связи. Например, у беспроводных устройств с несколькими режимами разные системы беспроводной связи (например, CDMA, TDMA, Wi-Fi и т.д.) могут присутствовать в беспроводном устройстве для получения доступа к множеству различных сетей. В зависимости от беспроводного устройства и сетей эти разные системы беспроводной связи могут работать отдельно друг от друга или могут работать одновременно.
Кроме того, хотя на фиг. 3 показан только один приемник 308 SPS, будет понятно, что в других аспектах изобретения могут использоваться более одного приемника 308 SPS в беспроводном устройстве 300 для выполнения функций определения местоположения и/или навигации.
Фиг. 4 является схемой последовательности операций верхнего уровня, показывающей иллюстративный способ 400 для выполнения пассивной коррекции частотного смещения приемника SPS. Первоначально способ может начаться посредством выбора мобильным контроллером (MC) 310 параметров генератора опорной частоты, имеющих наименьшую ошибку из разных технологий (этап B402). Эти параметры могут включать в себя частотные смещения и погрешности, которые могут быть сохранены в таблице 314 параметров генератора опорной частоты и/или таблице 317 частотных параметров SPS. В этот момент параметр частотного смещения может быть порожден с использованием технологий, соответствующих системе 304 беспроводной связи или приемнику 308 SPS. Когда наилучшее частотное смещение и погрешность считаны из таблицы 314 параметров генератора опорной частоты или таблицы 317 частотных параметров SPS, контроллер 310 MC может использовать эти значения для определения центра и ширины частотного окна SPS, которое используется для поиска сигнала SPS (этап B404). Эти центр и ширина поискового окна предоставляются контроллером 310 MC приемнику 308 SPS для инициализации процесса обнаружения (этап B406). Затем может быть сделано определение для проверки, получает ли приемник 308 SPS хорошее спутниковое местоположение (этап B408). Если спутниковый сигнал не был обнаружен, то контроллер 308 MC не обновляет значения частотного смещения SPS и/или погрешности в таблице 317 частотных параметров SPS (этап B412). Если приемник 308 SPS обнаруживает хорошее спутниковое местоположение, то контроллер 310 MC может обновить частотное смещение SPS и/или погрешность с использованием менеджера 316 частот SPS (этап B410). Подробности относительно того, каким образом выполняются обновления и последующее использование частот, представляются ниже в описании фиг. 5 и 6 соответственно.
В соответствии с этим, поскольку значения частотных смещений обновляются на основе последнего хорошего спутникового местоположения, упомянутый выше способ может быть определен как адаптивная методика для управления гетеродином SPS. Эта методика может дать возможность надлежащего смещения начальной области поиска частоты SPS и дополнительного уменьшения начальных погрешностей частоты SPS в отсутствие какой-либо лучшей информации менеджера генератора опорной частоты от какой-либо другой беспроводной технологии. Эта методика также может дать возможность надлежащего смещения начальной области поиска частоты SPS и дополнительного уменьшения начальной погрешности частоты SPS в автономных устройствах определения позиции, таких как автономные приемники GNSS, автономные устройства PND и т.д.
Фиг. 5 является схемой последовательности операций, показывающей иллюстративный процесс 500 для обновления частотных параметров смещения для пассивной коррекции для приемника 308 SPS. Этот процесс может являться частью менеджера 316 частоты SPS и, в частности, может быть реализован в модуле 318 определения оценки частотного смещения (FBED).
В аспекте изобретения, когда для формирования гетеродина SPS используется настраиваемый генератор опорной частоты, этот модуль может обеспечивать в качестве выходной информации обновленную оценку смещения частоты SPS, управляющие значения частот настраиваемого генератора опорной частоты, соответствующие оценке смещения, и время (например, метку времени), соответствующее этим значениям, и все они сохранены в таблице 317 частотных параметров SPS.
Первоначально входные параметры могут быть переданы этому модулю (этап B502), который может включать в себя текущее управляющее значение частоты настраиваемого генератора опорной частоты, текущую оценку частотного смещения и значение текущего времени (которое может представлять собой, например, метку времени (TS) SPS, которая может быть количеством секунд с 6 января 1980 года). Управляющее значение частоты настраиваемого генератора опорной частоты может быть числовой величиной (например, 12-битовым целым значением со знаком), и текущая оценка частотного смещения может быть переменной во времени величиной, которая может соответствовать значению текущего времени. Условная операция может быть выполнена для определения, были ли инициализированы управляющие значения частоты генератора опорной частоты и значения частотного смещения в таблице (317) частотных параметров SPS (этап B504). В противном случае эти параметры могут быть инициализированы с помощью входных параметров (этап B528), и может быть увеличен счетчик (этап B530). Этот счетчик может называться "счетчиком достоверности", и он может представлять меру качества текущего значения оценки частотного смещения SPS. Чем выше значение счетчика достоверности, тем более точной может считаться оценка частотного смещения. Если на этапе B504 определяется, что параметры были инициализированы, может быть выполнена другая условная операция, чтобы определить, равен ли счетчик достоверности нулю (этап B506). Если это так, управляющее значение частоты генератора опорной частоты и оценка частотного смещения в таблице частотных параметров SPS могут быть инициализированы с помощью входных параметров (этап B524), и счетчик уверенности может быть увеличен (этап B526).
Если на этапе B506 определено, что счетчик достоверности не был равен нулю, модуль 318 FBED может скорректировать текущую входную оценку частотного смещения, если она не соответствовала тому же самому управляющему значению частоты настраиваемого генератора опорной частоты, что и текущая оценка частоты смещения в таблице 317 частотных параметров SPS, чтобы должным образом учесть разность между ними двумя при вычислении нового частотного смещения; кроме того, полученные в результате погрешности частоты должны быть увеличены, чтобы учесть соответствующие ошибки предполагаемой чувствительности настраиваемого генератора опорной частоты.
Кроме того, старение генератора VCO может быть принято во внимание при корректировке входной оценки смещения частоты SPS на этапе 508.
Затем может быть выполнена проверка работоспособности над скорректированными значениями частотного смещения в условной операции (этап B510), чтобы обнаружить, находятся ли результаты за пределами ожидаемого или приемлемого диапазона. Если параметры не проходят проверку работоспособности, счетчик достоверности может быть уменьшен (этап B516) и может быть выполнена другая проверка, чтобы понять, равен ли счетчик достоверности нулю (этап B518). Если он не равен нулю, частотные параметры SPS не обновляются и способ 500 заканчивается. Если счетчик достоверности равен нулю, значения частотных параметров SPS возвращаются к значениям по умолчанию, предоставленным в таблице 317 частотных параметров SPS, и способ 500 заканчивается.
Если на условном этапе 510 скорректированные параметры проходят проверку работоспособности, управляющее значение частоты генератора опорной частоты и оценки смещения в таблице (317) частот SPS могут быть обновлены с использованием скорректированных параметров. Метка времени SPS, соответствующая параметрам генератора опорной частоты, также может быть выдана в качестве выходной информации. В различных аспектах оценка смещения генератора опорной частоты может быть обработана с использованием фильтра. Этот фильтр может представлять собой, например, простой однополюсный фильтр HR, имеющий коэффициент усиления 1/4. После обновления выходных значений счетчик достоверности может быть увеличен, если он меньше максимального значения (например, 255) (этап B514). Тогда способ 500 может быть выполнен с сохранением обновленного управляющего значения частоты генератора опорной частоты и оценки смещения и времени (например, метки времени SPS), соответствующего им, в таблице (317) частотных параметров.
В аспекте изобретения, когда для формирования гетеродина SPS используется не настраиваемый генератор опорной частоты, может применяться та же самая схема последовательности операций, за исключением того, что теперь генератор опорной частоты является не настраиваемым и поэтому не имеет управления напряжением (например, управляющее значение частоты не настраиваемого генератора опорной частоты может быть установлено равным 0, и оно не изменяется).
Фиг. 6 является схемой последовательности операций, показывающей иллюстративный процесс 600 для считывания сохраненного частотного смещения, сохраненного управляющего значения частоты генератора опорной частоты и сохраненного соответствующего им времени, а также текущего управляющего значения частоты генератора опорной частоты и текущей метки времени и определения скорректированного значения частотного смещения SPS и соответствующей погрешности частоты. Этот процесс может являться частью менеджера 316 частоты SPS и, в частности, может быть реализован в модуле 320 обновления оценки частотного смещения (FBEU).
Первоначально модуль 320 FBEU может принять последнее сохраненное управляющее значение частоты генератора опорной частоты (установленное равным 0 для не настраиваемого генератора опорной частоты и не изменяющееся), время, соответствующее сохраненному управляющему значению частоты генератора опорной частоты, и соответствующее сохраненное значение частотного смещения генератора опорной частоты, а также текущее управляющее значение частоты генератора опорной частоты и текущую метку времени (этап B602). Эти сохраненные значения обычно могут быть основаны на предшествующем хорошем местоположении спутника SPS, и в этом случае они взяты из таблицы (317) частотных параметров SPS, но могут соответствовать другим технологиям, соответствующим системе 304 беспроводной связи, если не было хорошего местоположения спутника SPS, или если они имели более хорошее качество (например, с меньшей погрешностью частоты), и в этом случае они взяты из таблицы (314) параметров генератора опорной частоты.
Может быть выполнена условная операция, чтобы определить, были ли не инициализированы сохраненные параметры (например, таблица (317) частотных параметров SPS и/или таблица (314) параметров генератора опорной частоты) в модуле 318 FBED, или счетчик достоверности был ниже порога (этап B604). Если это является истинным, частотное смещение SPS может быть "скорректировано" до нуля, и погрешность частоты устанавливается равной максимальной ошибке генератора опорной частоты с учетом старения (этап B612).
Если в таблице (314) параметров генератора опорной частоты определяется меньшая погрешность, она может использоваться. В противном случае, и если на этапе 604 определяется, что параметры SPS были инициализированы в таблице (317) частотных параметров SPS и счетчик достоверности не был слишком мал (то есть достоверность оценок параметров SPS является достаточной), значение частотного смещения, определенное в модуле 318 FBED, может использоваться и далее быть скорректированным (этап B608) в случае необходимости. После этого может быть определена погрешность частоты с учетом возраста генератора опорной частоты (этап B610).
В аспекте изобретения, в котором для генератора 306 опорной частоты используется настраиваемый генератор опорной частоты, если новое управляющее значение частоты генератора опорной частоты (в качестве входной информации) является таким же, как хранящееся в настоящее время в таблице (317) частотных параметров, то какие-либо коррекции смещения могут не являться необходимыми. Если они разные, то входное частотное смещение генератора опорной частоты может быть скорректировано для учета соответствующих разностей частоты. Кроме того, погрешность частоты может быть увеличена для учета соответствующих ошибок оцениваемой чувствительности генератора опорной частоты (этап B608). Этот этап не является уместным в аспекте изобретения, в котором используется не настраиваемый генератор колебаний, и может быть пропущен.
Фиг. 7 является блок-схемой иллюстративного устройства 700 беспроводной связи и навигации, которое использует коррекцию частотного смещения для всего устройства. Беспроводное устройство 700 может представлять собой беспроводное устройство любого типа, имеющее функции определения позиции и/или навигации, и может включать в себя, например, сотовые телефоны, смарт-фоны, персональные карманные компьютеры, переносные компьютеры и т.д.
Беспроводное устройство 700 может включать в себя систему 704 беспроводной связи, которая может быть соединена с одной или более антеннами 702. Система 704 беспроводной связи содержит подходящие устройства, аппаратное оборудование и/или программное обеспечение для взаимодействия с беспроводными базовыми станциями и/или обнаружения сигналов к ним или от них, и/или непосредственно с другими беспроводными устройствами. Система беспроводной связи может включать в себя модули передатчика/приемника, которые используют внешний генератор 706 опорной частоты, который обеспечивает возможность точного преобразования с повышением/понижением частоты (например, перенос по частоте) для переданных/принятых сигналов связи.
Беспроводное устройство 700 может включать в себя пользовательский интерфейс 722, который может включать в себя любые подходящие интерфейсные системы, такие как микрофон/динамик 728, клавиатура 726 и дисплей 724, которые дают возможность взаимодействия пользователя с мобильным устройством 700. Микрофон/динамик 728 обеспечивает голосовые службы связи с использованием системы 704 беспроводной связи. Клавиатура 726 содержит любые подходящие кнопки для пользовательского ввода. Дисплей 724 содержит любой подходящий дисплей, например жидкокристаллический дисплей с задней подсветкой.
В одном аспекте система 704 беспроводной связи может содержать систему связи CDMA, подходящую для взаимодействия с сетью CDMA беспроводных базовых станций, однако в других аспектах система беспроводной связи может содержать сотовую сеть телефонной связи другого типа, такую как, например, TDMA или GSM. Кроме того, могут использоваться технологии беспроводных сетей любого другого типа, например Wi-Fi (802.11x), WiMax и т.д.
Система 710 управления мобильной связью (MC) может быть соединена с системой 704 беспроводной связи и может включать в себя микропроцессор, который обеспечивает стандартные функции обработки, а также другие функциональные возможности вычисления и управления. Система 710 MC может также включать в себя встроенную память для хранения данных и программных команд для исполнения запрограммированных функциональных возможностей в беспроводном устройстве 700. Система 710 MC может дополнительно использовать внешнюю память (не показана) для дополнительного хранения. Функциональные возможности программного обеспечения, соответствующие аспектам раскрытия, будут более подробно описаны ниже.
Система определения позиции может быть обеспечена в беспроводном устройстве 700. В одном аспекте система определения позиции может включать в себя приемник 708 SPS. Приемник 708 SPS может быть соединен с одной или более антеннами 702, системой 710 MC и генератором 706 опорной частоты и содержать любое подходящее аппаратное оборудование и/или программное обеспечение для приема и обработки сигналов SPS. Приемник 708 SPS при необходимости запрашивает информацию и операции от других систем и выполняет вычисления, необходимые для определения позиции беспроводного устройства, с использованием измерений, полученных посредством любого подходящего алгоритма AFLT, алгоритма SPS или комбинации алгоритмов AFLT и SPS (A-SPS).
Приемник 708 SPS может использовать тот же самый генератор 706 опорной частоты для обработки принятых сигналов SPS, который используется для обработки сигналов для системы 704 беспроводной связи. Наличие совместно используемого генератора опорной частоты может обеспечить преимущества по увеличению эффективности мощности и уменьшению стоимости беспроводного устройства 700. Чтобы согласовать каждую систему в пределах беспроводного устройства 700, которые могут иметь разные требования по частотам, каждая система формирует свой собственный сигнал гетеродина (LO) на необходимой частоте из совместно используемого генератора 706 опорной частоты. В качестве примера, для одновременного приема сигнала SPS и приема/передачи сигналов беспроводной связи приемник 708 SPS и система 704 беспроводной связи может использовать отдельные частотные синтезаторы для формирования сигналов гетеродина (LO) с разными частотами, как требуется для каждой системы.
Генератор 706 опорной частоты может представлять собой настраиваемый генератор опорной частоты, такой как управляемый напряжением кварцевый генератор (VCCO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO), в которых частота колебаний может управляться напряжением или, как в этом аспекте, цифровым значением управления напряжением. Нежелательные изменения частоты колебаний вследствие температуры (и/или других источников ошибок) могут быть компенсированы для улучшения точности. Такие ошибки и их соответствующие компенсации более подробно описаны ниже.
В другом аспекте генератор 706 опорной частоты может представлять собой не настраиваемый гетеродин, такой как кварцевый генератор (XO) или кварцевый генератор с температурной компенсацией (TCXO). Нежелательные изменения частоты колебаний вследствие температуры (и/или других источников ошибки) могут быть компенсированы через коррекции, примененные в каждой индивидуальной системе на плате беспроводного устройства, такого как приемник 708 SPS и/или системы 704 беспроводной связи, расположенные ниже по потоку от гетеродина каждой системы.
Программный модуль и таблицы данных могут находиться в памяти и используются системой 710 MC, чтобы управлять ошибками и смещениями в генераторе 706 опорной частоты, когда система 704 беспроводной связи или приемник 708 SPS инициализируются. А именно, менеджер 712 частоты генератора опорной частоты может использоваться для обеспечения множества оценок частотного смещения, которые могут быть основаны на предыдущем состоянии системы, температуре и/или возрасте генератора опорной частоты. Эти оценки обычно могут иметь разные точности, которые могут быть измерены в частях на миллион (ppm). Частотные ошибки генератора опорной частоты и соответствующие погрешности могут быть сохранены в таблице 714 частотных параметров генератора опорной частоты. Когда система беспроводной связи или система SPS инициализируется, менеджер 712 частоты генератора опорной частоты может выбрать оценку частотного смещения, которая имеет наименьшую соответствующую ошибку. Это значение смещения может затем использоваться, чтобы должным образом обнаруживать, отслеживать сигналы и/или выполнять перенос по частоте сигналов для системы беспроводной связи и обнаруживать, отслеживать и/или демодулировать сигналы для системы SPS.
Значения частотного смещения, которые сохранены в таблице 714 параметров генератора опорной частоты, могут включать в себя жестко заданные значения по умолчанию, предоставленные изготовителями, когда генератор опорной частоты выполнен для определения "хорошего качества" используемого генератора опорной частоты; значения, помещенные в устройство от оператора сети (которые могут изменяться по точности в зависимости от типа сети, например WCDMA, GSM, 1xDO); значения, основанные на измеренной температуре и/или возрасте генератора опорной частоты, и значения, основанные на значении "последней хорошей системы" (RGS), полученные после того, как система беспроводной связи захватывает несущую частоту поставщика услуг. Значение RGS может быть уточнено и сохранено, поскольку во время работы система 704 беспроводной связи может использовать циклы отслеживания частоты для определения сдвигов несущей частоты. Это может быть направлено на погрешности частоты из-за смещений и сдвигов генератора опорной частоты. Более новые значения могут быть сохранены как значение "последней хорошей системы" в таблице 314 параметров генератора опорной частоты.
В этом аспекте во время инициализации приемника SPS менеджер 712 частоты генератора опорной частоты обеспечивает частотное смещение генератора опорной частоты на основе наилучшей доступной информации от всех беспроводных систем (связи и SPS), тем самым уменьшая период времени для обнаружения спутника. Сохраненные значения частотного смещения кварцевого генератора (XO) используются и во время инициализации системы (704) беспроводной связи для обнаружения/приема и передачи сигналов беспроводной связи, а также во время инициализации приемника (708) SPS для обнаружения сигнала SPS.
Как беспроводные системы, так и системы SPS могут извлечь выгоду из "знания" о генераторе опорной частоты друг у друга, поскольку обеим разрешено использование менеджера 712 частоты генератора опорной частоты как для обновления, так и для использования таблицы (714) частотных параметров генератора опорной частоты.
В случае, когда для генератора (706) опорной частоты используется не настраиваемый генератор колебаний, сохраненные значения частотного смещения генератора опорной частоты используются "пассивным" образом, что означает, что коррекции частотного смещения не могут быть применены непосредственно к корректировке не настраиваемого генератора (706) опорной частоты. Вместо этого все коррекции генератора опорной частоты применяются в другом месте в каждой индивидуальной подсистеме устройства для надлежащего обнаружения, отслеживания и/или модуляции/демодуляции ее сигналов. Например, сохраненные значения частотного смещения генератора опорной частоты используются для вычисления центра и ширины для окна, используемого для поиска сигнала SPS, как показано выше на фиг. 3. Сохраненные значения частотного смещения генератора опорной частоты также могут использоваться для вычисления центра и ширины для окна, используемого для поиска сигнала беспроводной связи
В случае, когда для генератора (706) опорной частоты используется настраиваемый генератор колебаний, сохраненные значения частотного смещения генератора опорной частоты используются "активным" образом, что означает, что коррекции частотного смещения могут быть применены непосредственно к корректировке настраиваемого генератора (706) опорной частоты вместо того, чтобы применять исправления для корректировки центра и ширины частотного поискового окна в программном обеспечении. В этом аспекте частотные параметры настраиваемого генератора опорной частоты, полученные из системы (704) беспроводной связи и из приемника (708) SPS, могут использоваться непосредственно для настройки настраиваемого генератора (706) опорной частоты таким образом, чтобы принятый сигнал SPS и принятые/переданные сигналы беспроводной связи были точно перемещены по частоте (преобразованы с уменьшением частоты от радиочастотной несущей в основной диапазон частот в первом случае и преобразованы с уменьшением/увеличением частоты в последнем случае).
Программное обеспечение и значения частотного смещения генератора опорной частоты могут быть сохранены в энергонезависимой памяти, которая может являться встроенной для системы 710 MC, однако в других аспектах эта память может находиться в отдельном пакете микросхем. В дополнение к оценке частотного смещения генератора опорной частоты другие параметры, такие как погрешность частоты, могут быть сохранены в таблице 714 параметров генератора опорной частоты для последующего использования менеджером 710 XO.
Хотя на фиг. 7 показана только одна система 704 беспроводной связи, будет понятно, что в других аспектах изобретения может использоваться более одной системы беспроводной связи. Например, у беспроводных устройств с несколькими режимами разные системы беспроводной связи (например, CDMA, TDMA, Wi-Fi и т.д.) могут присутствовать в беспроводном устройстве для получения доступа к множеству различных сетей. В зависимости от беспроводного устройства и сетей эти разные системы беспроводной связи могут работать отдельно друг от друга или могут работать одновременно.
Кроме того, хотя на фиг. 7 показан только один приемник 708 SPS, будет понятно, что в других аспектах изобретения могут использоваться более одного приемника 708 SPS в беспроводном устройстве 700 для выполнения функций определения местоположения и/или навигации.
Фиг. 8 является схемой последовательности операций верхнего уровня, показывающей иллюстративный процесс 800 для выполнения пассивной коррекции частотного смещения приемника SPS. Первоначально способ может начаться посредством выбора мобильным контроллером (MC) 710 параметров генератора опорной частоты, имеющих наименьшую ошибку из разных технологий (этап B802). Эти параметры включают в себя частотные смещения и погрешности, которые могут быть сохранены в таблице 714 параметров генератора опорной частоты. В этот момент параметр частотного смещения может быть порожден с использованием технологий, соответствующих системе 704 беспроводной связи или приемнику 708 SPS. Когда наилучшее частотное смещение и погрешность считаны из таблицы 714 параметров генератора опорной частоты, контроллер 710 MC может использовать эти значения для точной настройки центра и ширины частотного окна SPS, которое используется для поиска сигнала SPS (этап B806). Эти центр и ширина поискового окна предоставляются контроллером 310 MC приемнику 308 SPS для содействия инициализации процесса обнаружения спутников. Затем может быть сделано определение для проверки, получает ли приемник 708 SPS хорошее спутниковое местоположение (этап B808). Если спутниковый сигнал не был обнаружен, то контроллер 710 MC не обновляет значения частотного смещения SPS и/или погрешности в таблице 714 параметров генератора опорной частоты (этап B812). Если приемник 708 SPS обнаруживает хорошее спутниковое местоположение, то контроллер 710 MC может обновить частотное смещение SPS и/или погрешность с использованием менеджера 712 частот генератора XO (этап B810).
В соответствии с этим, поскольку значения частотного смещения обновляются на основе последнего хорошего местоположения спутника, упомянутый выше способ может быть определен как адаптивная методика для управления гетеродином. Эта методика может дать возможность надлежащего смещения начальной области поиска частоты SPS и дальнейшего уменьшения начальных погрешностей частоты SPS в отсутствие какой-либо лучшей информации менеджера генератора XO от какой-либо другой беспроводной технологии.
Специалисты в области техники поймут, что информация и сигналы могут быть представлены с использованием любых из множества различных технологий и методик. Например, данные, команды, информация, сигналы, биты, символы и элементарные сигналы, которые могут упоминаться в изложенном выше описании, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любой их комбинацией.
Кроме того, специалисты также поймут, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритмов, описанные здесь в связи с раскрытием, могут быть реализованы как электронное аппаратное оборудование, программное обеспечение или их комбинация. Чтобы ясно проиллюстрировать эту взаимозаменяемость аппаратного оборудования и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы были описаны выше в общих чертах в терминах их функциональных возможностей. Реализованы ли такие функциональные возможности как аппаратное оборудование или программное обеспечение, зависит от конкретного приложения и конструктивных ограничений, налагаемых на систему в целом. Специалисты могут реализовать описанные функциональные возможности различными способами для каждого конкретного приложения, но такие реализации не должны рассматриваться как вызывающие отход от объема настоящего изобретения.
Способы, последовательности и/или алгоритмы, описанные в связи с раскрытыми здесь аспектами, могут быть воплощены непосредственно в аппаратных средствах, в программном модуле, исполняемом посредством процессора, или в их комбинации. Программный модуль может находиться в оперативном запоминающем устройстве (ОЗУ), флэш-памяти, постоянном запоминающем устройстве (ПЗУ), стираемом программируемом постоянном запоминающем устройстве (СППЗУ), электрически стираемом программируемом постоянном запоминающем устройстве (ЭСППЗУ), регистрах, жестком диске, съемном диске, компакт-диске, предназначенном только для чтения (CD-ROM), или любом другом носителе данных, известном в области техники. Иллюстративный носитель данных соединен с процессором так, что процессор может считывать информацию с носителя данных и записывать информацию на него. В качестве альтернативы носитель данных может являться неотъемлемой частью процессора.
В соответствии с этим аспект изобретения может включать в себя машиночитаемые носители, воплощающие способ управления гетеродином в беспроводном устройстве, имеющем функциональные возможности определения позиции. В соответствии с этим изобретение не ограничивается иллюстрированными примерами, и любые средства для выполнения описанных здесь функций включены в аспекты изобретения.
Хотя предшествующее раскрытие показывает иллюстративные аспекты изобретения, следует отметить, что могут быть выполнены различные изменения и модификации без отступления от контекста изобретения, заданного посредством приложенной формулы изобретения. Функции, этапы и/или действия способа в соответствии с описанными здесь аспектами изобретения не обязательно должны выполняться в каком-либо специфическом порядке. Кроме того, хотя элементы изобретения могут быть описаны или заявлены в единственном числе, множественное число предусматривается, если явно не указано ограничение единственным числом.
Изобретение относится к беспроводной связи и может быть использовано в беспроводных устройствах для управления генератором опорной частоты. Способ управления генератором опорной частоты в беспроводном устройстве, включающем в себя систему беспроводной связи и систему спутникового позиционирования, заключается в том, что выбирают параметры генератора опорной частоты, соответствующие наименьшей ошибке генератора опорной частоты, причем выбор определяется в беспроводном устройстве на основе обработки первого и второго параметров частотного смещения, определенных соответственно на основе первой беспроводной технологии и второй беспроводной технологии, увеличивают значение счетчика достоверности, содержащегося в беспроводном устройстве, указывающего достоверность в выбранных параметрах генератора опорной частоты, по меньшей мере частично, в ответ на выбор параметров генератора опорной частоты, обнаруживают спутник на основе выбранных параметров генератора опорной частоты, получают привязку местоположения с помощью спутника и определяют ее качество с помощью спутника и обновляют параметры генератора опорной частоты в ответ на определение удовлетворительного качества привязки местоположения с помощью спутника. Технический результат - уменьшение времени поиска и обнаружения. 4 н. и 83 з.п. ф-лы, 8 ил.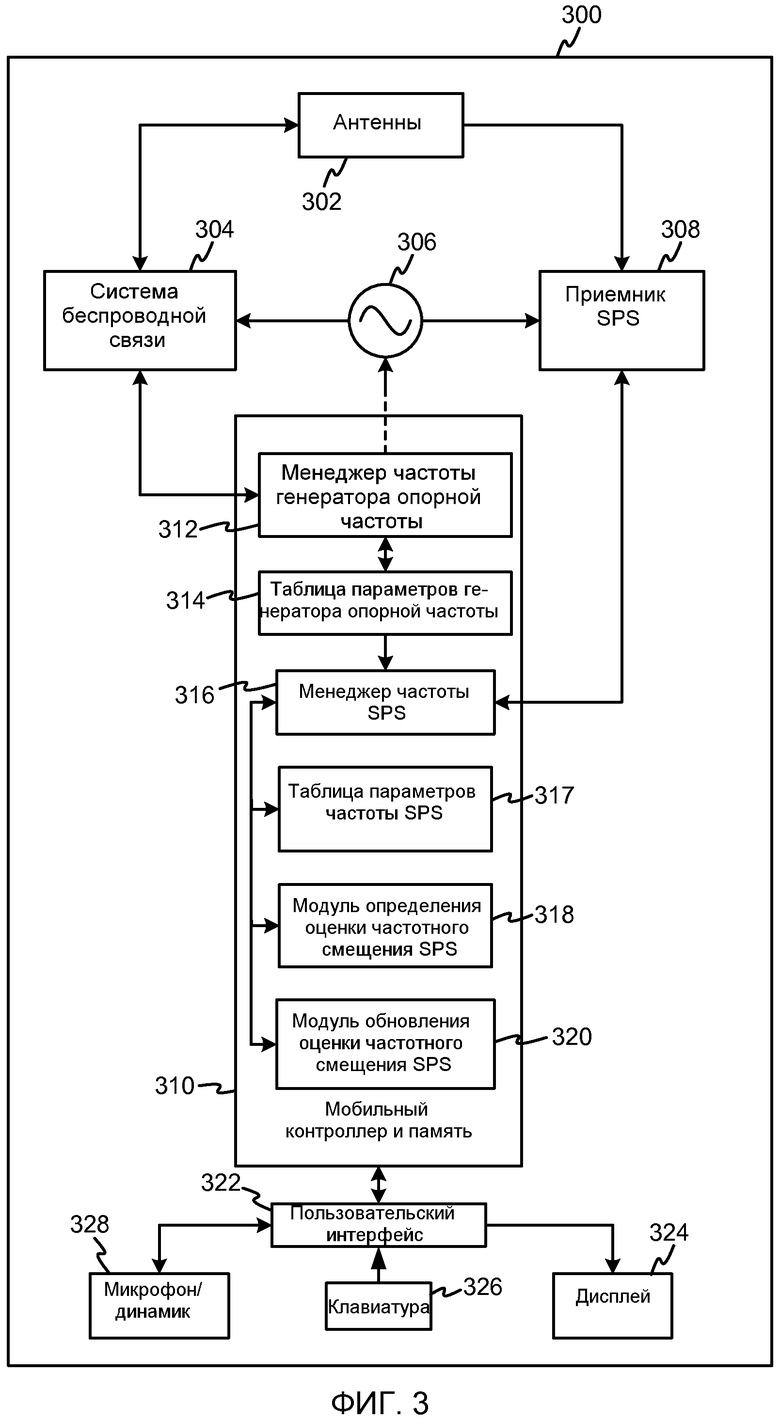
1. Способ управления генератором опорной частоты в беспроводном устройстве, включающем в себя систему беспроводной связи и систему спутникового позиционирования, содержащий этапы, на которых:
выбирают параметры генератора опорной частоты, соответствующие наименьшей ошибке генератора опорной частоты, причем выбор определяется в беспроводном устройстве на основе обработки первого параметра частотного смещения, определенного на основе первой беспроводной технологии, и второго параметра частотного смещения, определенного на основе второй беспроводной технологии;
увеличивают значение счетчика достоверности, содержащегося в беспроводном устройстве, указывающего достоверность в выбранных параметрах генератора опорной частоты, по меньшей мере частично, в ответ на выбор параметров генератора опорной частоты;
обнаруживают спутник на основе выбранных параметров генератора опорной частоты;
получают привязку местоположения с помощью спутника;
определяют качество привязки местоположения с помощью спутника; и
обновляют параметры генератора опорной частоты в ответ на определение удовлетворительного качества привязки местоположения с помощью спутника.
2. Способ по п.1, в котором генератор опорной частоты содержит настраиваемый генератор опорной частоты с параметрами настраиваемого генератора опорной частоты или ненастраиваемый генератор опорной частоты с параметрами ненастраиваемого генератора опорной частоты, причем способ дополнительно содержит этапы, на которых:
определяют центр частоты и ширину поискового окна с использованием частотных параметров генератора; и
инициализируют или повторно инициализируют приемник системы спутникового позиционирования (SPS) с использованием центра частоты и ширины поискового окна.
3. Способ по п.2, в котором настраиваемый генератор опорной частоты содержит управляемый напряжением кварцевый генератор (VCXO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO), а ненастраиваемый генератор опорной частоты содержит кварцевый генератор (ХО) или кварцевый генератор с температурной компенсацией (ТСХО).
4. Способ по п.2, дополнительно содержащий этапы, на которых:
определяют параметры генератора опорной частоты на основе качества привязки местоположения с помощью спутника; и
сохраняют параметры генератора опорной частоты, когда беспроводное устройство успешно определяет привязку местоположения.
5. Способ по п.4, в котором параметры генератора опорной частоты включают в себя частотное смещение генератора опорной частоты, погрешность частотного смещения генератора опорной частоты и время, в которое были определены параметры генератора опорной частоты.
6. Способ по п.5, в котором параметры генератора опорной частоты включают в себя управляющее значение частоты генератора опорной частоты.
7. Способ по п.4, дополнительно содержащий этап, на котором сохраняют параметры генератора опорной частоты в таблице, содержащей множество параметров генератора опорной частоты, выведенных из различных технологий в беспроводном устройстве.
8. Способ по п.1, в котором система связи включает в себя по меньшей мере одну из сети CDMA, сети ТОМА и сети Wi-Fi.
9. Способ по п.1, в котором система спутникового позиционирования включает в себя систему глобального позиционирования (GPS).
10. Способ по п.1, в котором генератор опорной частоты содержит настраиваемый генератор опорной частоты, и параметры генератора опорной частоты включают в себя параметры настраиваемого генератора опорной частоты, при этом способ дополнительно содержит этапы, на которых:
определяют центр частоты и ширину поискового окна с использованием параметров генератора опорной частоты; и
настраивают настраиваемый генератор опорной частоты с использованием определенных параметров настраиваемого генератора опорной частоты.
11. Способ по п.10, в котором настраиваемый генератор опорной частоты содержит управляемый напряжением кварцевый генератор (VCXO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO).
12. Способ по п.10, дополнительно содержащий этапы, на которых:
определяют параметры генератора опорной частоты на основе качества привязки местоположения с помощью спутника; и
сохраняют параметры генератора опорной частоты, когда беспроводное устройство успешно определяет привязку местоположения с помощью спутника.
13. Способ по п.12, в котором параметры генератора опорной частоты включают в себя управляющее значение частоты генератора опорной частоты, частотное смещение генератора опорной частоты, погрешность частотного смещения генератора опорной частоты и время, в которое были определены параметры генератора опорной частоты.
14. Способ по п.13, дополнительно содержащий этап, на котором:
сохраняют параметры генератора опорной частоты в таблице, содержащей множество параметров генератора опорной частоты, полученных из различных технологий в беспроводном устройстве.
15. Способ по п.14, дополнительно содержащий этапы, на которых:
инициализируют или повторно инициализируют по меньшей мере один приемник, соответствующий любой из различных технологий в беспроводном устройстве, с использованием центра частоты и ширины поискового окна.
16. Способ по п.10, в котором упомянутые различные технологии, используемые в беспроводном устройстве, содержат систему связи и систему спутникового позиционирования.
17. Способ по п.16, в котором система связи включает в себя по меньшей мере одну из сети CDMA, сети TDMA и сети Wi-Fi.
18. Способ по п.16, в котором система спутникового позиционирования включает в себя систему глобального позиционирования (GPS).
19. Способ по п.1, дополнительно содержащий этапы, на которых:
принимают текущее управляющее значение частоты генератора опорной частоты и текущую оценку частотного смещения генератора опорной частоты;
корректируют принятую оценку частотного смещения генератора опорной частоты;
выполняют проверку работоспособности над скорректированной оценкой частотного смещения генератора опорной частоты; и
определяют параметры генератора опорной частоты для сохранения на основе скорректированных параметров частотного смещения генератора опорной частоты.
20. Способ по п.19, содержащий этап, на котором определяют погрешность частоты генератора опорной частоты на основе возраста оценки смещения.
21. Способ по п.20, дополнительно содержащий этап, на котором сбрасывают текущее значение оценки частотного смещения генератора опорной частоты в нуль и текущее значение погрешности частоты генератора опорной частоты в максимальное значение, когда сохраненные параметры генератора опорной частоты не были инициализированы или когда достоверность не является достаточной.
22. Беспроводное устройство, имеющее функциональные возможности определения местоположения, управляющие генератором опорной частоты с использованием множества технологий, содержащее:
систему беспроводной связи;
приемник системы спутникового позиционирования (SPS);
генератор опорной частоты, соединенный с системой беспроводной связи и приемником SPS;
мобильный контроллер, соединенный с генератором опорной частоты, приемником SPS и системой беспроводной связи; и
память, соединенную с мобильным контроллером, причем память хранит таблицу параметров генератора опорной частоты и команды, побуждающие мобильный контроллер:
выбирать параметры генератора опорной частоты, соответствующие наименьшей ошибке генератора опорной частоты, причем выбор определяется в беспроводном устройстве на основе обработки первого параметра частотного смещения, определенного на основе первой беспроводной технологии, и второго параметра частотного смещения, определенного на основе второй беспроводной технологии;
увеличивать значение счетчика достоверности, указывающего достоверность в выбранных параметрах генератора опорной частоты, по меньшей мере частично, в ответ на выбор параметров генератора опорной частоты;
обнаруживать спутник на основе выбранных параметров генератора опорной частоты,
получать привязку местоположения с помощью спутника,
определять качество привязки местоположения с помощью спутника, и
обновлять параметры генератора опорной частоты в ответ на определение удовлетворительного качества привязки местоположения с помощью спутника.
23. Устройство по п.22, в котором генератор опорной частоты содержит либо настраиваемый генератор опорной частоты с параметрами настраиваемого генератора опорной частоты, либо ненастраиваемый генератор опорной частоты с параметрами ненастраиваемого генератора опорной частоты, и дополнительно хранимые команды побуждают мобильный контроллер:
определять центр частоты и ширину поискового окна с использованием параметров генератора опорной частоты; и
инициализировать приемник SPS с использованием центра частоты и ширины поискового окна.
24. Устройство по п.23, в котором настраиваемый генератор опорной частоты содержит управляемый напряжением кварцевый генератор (VCXO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO), и/или ненастраиваемый генератор опорной частоты содержит кварцевый генератор (ХО) или кварцевый генератор с температурной компенсацией (ТСХО).
25. Устройство по п.23, в котором хранимые команды дополнительно побуждают мобильный контроллер:
определять параметры генератора опорной частоты на основе качества привязки местоположения, и
сохранять параметры генератора опорной частоты, когда беспроводное устройство успешно определяет свое местоположение.
26. Устройство по п.25, в котором параметры генератора опорной частоты включают в себя частотное смещение генератора опорной частоты, погрешность частоты генератора опорной частоты и время, в которое определяются параметры генератора опорной частоты.
27. Устройство по п.22, в котором параметры генератора опорной частоты включают в себя управляющее значение частоты генератора опорной частоты.
28. Устройство по п.26, в котором хранимые команды дополнительно побуждают мобильный контроллер сохранять параметры генератора опорной частоты в таблице, содержащей множество параметров генератора опорной частоты, полученных на основе различных технологий беспроводного устройства.
29. Устройство по п.22, в котором хранимые команды побуждают мобильный контроллер:
определять центр частоты и ширину поискового окна с использованием параметров генератора опорной частоты; и
инициализировать или повторно инициализировать по меньшей мере один приемник, ассоциированный с любой из различных технологий в беспроводном устройстве, с использованием центра частоты и ширины поискового окна.
30. Устройство по п.22, в котором беспроводное устройство ассоциировано с системой беспроводной связи и приемником SPS.
31. Устройство по п.30, в котором система беспроводной связи включает в себя по меньшей мере одну из системы CDMA, системы TDMA и системы Wi-Fi.
32. Устройство по п.30, в котором приемник SPS включает в себя приемник системы глобального позиционирования.
33. Устройство по п.22, в котором генератор опорной частоты содержит настраиваемый генератор колебаний, и параметры генератора опорной частоты включают в себя параметры настраиваемого генератора опорной частоты, причем хранимые команды побуждают мобильный контроллер:
определять центр частоты и ширину поискового окна на основе параметров генератора опорной частоты; и
корректировать настраиваемый генератор колебаний с использованием определенных параметров генератора опорной частоты.
34. Устройство по п.33, в котором настраиваемый генератор колебаний включает в себя управляемый напряжением кварцевый генератор (VCXO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO).
35. Устройство по п.33, в котором хранимые команды дополнительно побуждают мобильный процессор:
определять параметры генератора опорной частоты на основе качества привязки местоположения; и
сохранять параметры генератора опорной частоты, когда беспроводное устройство успешно определяет свое местоположение.
36. Устройство по п.35, в котором параметры генератора опорной частоты включают в себя управляющее значение частоты генератора опорной частоты, частотное смещение генератора опорной частоты, погрешность частотного смещения генератора опорной частоты и время, в которое они определены.
37. Устройство по п.36, в котором таблица параметров генератора опорной частоты сохраняет множество параметров генератора опорной частоты, полученных от различных технологий.
38. Устройство по п.37, в котором хранимые команды побуждают мобильный контроллер:
определять центр частоты и ширину поискового окна с использованием параметров генератора опорной частоты; и
инициализировать или повторно инициализировать по меньшей мере один приемник, ассоциированный с любой из различных технологий в беспроводном устройстве, с использованием центра частоты и ширины поискового окна.
39. Устройство по п.28, в котором беспроводное устройство ассоциировано с системой беспроводной связи и приемником SPS.
40. Устройство по п.39, в котором система беспроводной связи включает в себя по меньшей мере одну из системы CDMA, системы TDMA и системы Wi-Fi.
41. Устройство по п.40, в котором приемник SPS включает в себя приемник системы глобального позиционирования (GPS).
42. Беспроводное устройство, имеющее функциональные возможности определения местоположения, управляющие генератором опорной частоты с использованием множества технологий, содержащее:
средство для выбора параметров генератора опорной частоты, соответствующих наименьшей погрешности генератора опорной частоты, причем выбор определяется в беспроводном устройстве на основе обработки первого параметра частотного смещения, определенного на основе первой беспроводной технологии, и второго параметра частотного смещения, определенного на основе второй беспроводной технологии;
средство для увеличения значения счетчика достоверности, указывающего достоверность в выбранных параметрах генератора опорной частоты, по меньшей мере частично, в ответ на выбор параметров генератора опорной частоты;
средство для обнаружения спутника на основе выбранных параметров генератора опорной частоты;
средство для получения привязки местоположения с помощью спутника;
средство для определения качества привязки местоположения с помощью спутника; и
средство для обновления параметров генератора опорной частоты в ответ на определение удовлетворительного качества привязки местоположения с помощью спутника.
43. Устройство по п.42, в котором генератор опорной частоты содержит настраиваемый генератор опорной частоты с параметрами настраиваемого генератора опорной частоты или ненастраиваемый генератор опорной частоты с параметрами ненастраиваемого генератора опорной частоты, причем устройство дополнительно содержит:
средство для определения центра частоты и ширины поискового окна с использованием частотных параметров генератора; и
средство для инициализации или повторной инициализации приемника SPS с использованием центра частоты и ширины поискового окна.
44. Устройство по п.43, в котором настраиваемый генератор опорной частоты содержит управляемый напряжением кварцевый генератор (VCXO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO), и ненастраиваемый генератор опорной частоты содержит кварцевый генератор (ХО) или кварцевый генератор с температурной компенсацией (ТСХО).
45. Устройство по п.42, дополнительно содержащее: средство для определения параметров генератора опорной частоты на основе качества привязки местоположения с помощью спутника; и
средство для сохранения параметров генератора опорной частоты, когда беспроводное устройство успешно определяет привязку местоположения.
46. Устройство по п.45, в котором параметры генератора опорной частоты включают в себя частотное смещение генератора опорной частоты, погрешность частотного смещения генератора опорной частоты и время, в которое были определены параметры генератора опорной частоты.
47. Устройство по п.46, в котором параметры генератора опорной частоты включают в себя управляющее значение частоты генератора опорной частоты.
48. Устройство по п.45, дополнительно содержащее средство для сохранения множества параметров генератора опорной частоты, полученных на основе различных технологий в беспроводном устройстве.
49. Устройство по п.45, дополнительно содержащее:
средство для определения центра частоты и ширины поискового окна с использованием параметров генератора опорной частоты; и
средство для инициализации или повторной инициализации по меньшей мере одного приемника в беспроводном устройстве с использованием центра частоты и ширины поискового окна.
50. Устройство по п.42, причем беспроводное устройство дополнительно содержит систему связи и систему спутникового позиционирования.
51. Устройство по п.50, в котором система связи включает в себя по меньшей мере одну из сети CDMA, сети TDMA и сети Wi-Fi.
52. Устройство по п.50, в котором система спутникового позиционирования включает в себя систему глобального позиционирования (GPS).
53. Устройство по п.42, в котором генератор опорной частоты содержит настраиваемый генератор опорной частоты, и параметры генератора опорной частоты включают в себя параметры настраиваемого генератора опорной частоты, причем устройство дополнительно содержит:
средство для определения центра частоты и ширины поискового окна с использованием параметров генератора опорной частоты; и
средство для настройки настраиваемого генератора опорной частоты с использованием определенных параметров настраиваемого генератора опорной частоты.
54. Устройство по п.53, в котором настраиваемый генератор опорной частоты содержит управляемый напряжением кварцевый генератор (VCXO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO).
55. Устройство по п.53, дополнительно содержащее:
средство для определения параметров генератора опорной частоты на основе качества привязки местоположения с помощью спутника; и
средство для сохранения параметров генератора опорной частоты, когда беспроводное устройство успешно определяет привязку местоположения с помощью спутника.
56. Устройство по п.55, в котором параметры генератора опорной частоты включают в себя управляющее значение частоты генератора опорной частоты, частотное смещение генератора опорной частоты, погрешность частотного смещения генератора опорной частоты и время, в которое были определены параметры генератора опорной частоты.
57. Устройство по п.56, дополнительно содержащее средство для сохранения множества параметров генератора опорной частоты, полученных на основе различных технологий в беспроводном устройстве.
58. Устройство по п.57, дополнительно содержащее:
средство для определения центра частоты и ширины поискового окна с использованием параметров генератора опорной частоты; и
средство для инициализации или повторной инициализации по меньшей мере одного приемника, ассоциированного с любой из различных технологий в беспроводном устройстве, с использованием центра частоты и ширины поискового окна.
59. Устройство по п.53, причем беспроводное устройство содержит систему связи и систему спутникового позиционирования.
60. Устройство по п.59, в котором система связи включает в себя по меньшей мере одну из сети CDMA, сети TDMA и сети Wi-Fi.
61. Устройство по п.59, в котором система спутникового позиционирования включает в себя систему глобального позиционирования (GPS).
62. Устройство по п.57, дополнительно содержащее:
средство для приема текущего управляющего значения частоты генератора опорной частоты и текущей оценки частотного смещения генератора опорной частоты;
средство для корректировки принятой оценки частотного смещения генератора опорной частоты;
средство для выполнения проверки работоспособности над скорректированной оценкой частотного смещения генератора опорной частоты; и
средство для определения параметров генератора опорной частоты для сохранения на основе скорректированных параметров частотного смещения генератора опорной частоты.
63. Устройство по п.62, дополнительно содержащее: средство для корректировки принятой оценки частотного
смещения, когда параметры генератора опорной частоты были определены и достоверность является достаточной; и
средство для определения погрешности частоты генератора опорной частоты на основе возраста оценки смещения.
64. Устройство по п.63, дополнительно содержащее:
средство для сброса текущего значения оценки частотного смещения генератора опорной частоты в нуль и значения погрешности частоты генератора опорной частоты в максимальное значение, когда параметры генератора опорной частоты не были инициализированы или когда достоверность не является достаточной.
65. Машиночитаемый носитель, содержащий сохраненные в нем команды, исполняемые процессором для
выбора параметров генератора опорной частоты соответствующих наименьшей ошибке генератора опорной частоты, причем выбор определяется в беспроводном устройстве на основе обработки первого параметра частотного смещения, определенного на основе первой беспроводной технологии, и второго параметра частотного смещения, определенного на основе второй беспроводной технологии;
увеличения значения счетчика достоверности, указывающего достоверность в выбранных параметрах генератора опорной частоты, по меньшей мере частично, в ответ на выбор параметров генератора опорной частоты;
обнаружения спутника на основе выбранных параметров генератора опорной частоты;
обработки привязки местоположения с помощью спутника;
определения качества привязки местоположения с помощью спутника; и
обновления параметров генератора опорной частоты в ответ на определение удовлетворительного качества привязки местоположения с помощью спутника.
66. Машиночитаемый носитель по п.65, причем генератор опорной частоты содержит настраиваемый генератор опорной частоты с параметрами настраиваемого генератора опорной частоты или ненастраиваемый генератор опорной частоты с параметрами ненастраиваемого генератора опорной частоты, причем машиночитаемый носитель дополнительно содержит команды для
определения центра частоты и ширины поискового окна с использованием частотных параметров генератора; и
инициализации или повторной инициализации приемника SPS с использованием центра частоты и ширины поискового окна.
67. Машиночитаемый носитель по п.66, причем настраиваемый генератор опорной частоты содержит управляемый напряжением кварцевый генератор (VCXO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO), и ненастраиваемый генератор опорной частоты содержит кварцевый генератор (ХО) или кварцевый генератор с температурной компенсацией (ТСХО).
68. Машиночитаемый носитель по п.66, дополнительно содержащий команды для
определения параметров генератора опорной частоты на основе качества привязки местоположения с помощью спутника; и
сохранения параметров генератора опорной частоты, когда беспроводное устройство успешно определяет привязку местоположения.
69. Машиночитаемый носитель по п.68, причем параметры генератора опорной частоты включают в себя частотное смещение генератора опорной частоты, погрешность частотного смещения генератора опорной частоты и время, в которое были определены параметры генератора опорной частоты.
70. Машиночитаемый носитель по п.69, причем параметры генератора опорной частоты включают в себя управляющее значение частоты генератора опорной частоты.
71. Машиночитаемый носитель по п.68, дополнительно содержащий команды для сохранения параметров генератора опорной частоты в таблице, содержащей множество параметров генератора опорной частоты, полученных на основе различных технологий в беспроводном устройстве.
72. Машиночитаемый носитель по п.68, дополнительно содержащий команды для
определения центра частоты и ширины поискового окна с использованием параметров генератора опорной частоты; и
инициализации или повторной инициализации по меньшей мере одного приемника в беспроводном устройстве с использованием центра частоты и ширины поискового окна.
73. Машиночитаемый носитель по п.65, причем беспроводное устройство включает в себя систему связи и систему спутникового позиционирования.
74. Машиночитаемый носитель по п.73, причем система связи включает в себя по меньшей мере одну из сети CDMA, сети TDMA и сети Wi-Fi.
75. Машиночитаемый носитель по п.73, причем система спутникового позиционирования включает в себя систему глобального позиционирования (GPS).
76. Машиночитаемый носитель по п.65, причем генератор опорной частоты содержит настраиваемый генератор опорной частоты, и параметры генератора опорной частоты включают в себя параметры настраиваемого генератора опорной частоты, при этом машиночитаемый носитель дополнительно содержит команды для
определения центра частоты и ширины поискового окна с использованием параметров генератора опорной частоты; и
настройки настраиваемого генератора опорной частоты с использованием определенных параметров настраиваемого генератора опорной частоты.
77. Машиночитаемый носитель по п.76, причем настраиваемый генератор опорной частоты содержит управляемый напряжением кварцевый генератор (VCXO) или управляемый напряжением кварцевый генератор с температурной компенсацией (VCTCXO).
78. Машиночитаемый носитель по п.76, дополнительно содержащий команды для
определения параметров генератора опорной частоты на основе качества привязки местоположения с помощью спутника; и
сохранения параметров генератора опорной частоты, когда беспроводное устройство успешно определяет привязку местоположения с помощью спутника.
79. Машиночитаемый носитель по п.78, причем параметры генератора опорной частоты включают в себя управляющее значение частоты генератора опорной частоты, частотное смещение генератора опорной частоты, погрешность частотного смещения генератора опорной частоты и время, в которое были определены параметры генератора опорной частоты.
80. Машиночитаемый носитель по п.79, дополнительно содержащий команды для сохранения параметров генератора опорной частоты в таблице, содержащей множество параметров генератора опорной частоты, полученных на основе различных технологий в беспроводном устройстве.
81. Машиночитаемый носитель по п.80, дополнительно содержащий команды для
определения центра частоты и ширины поискового окна с использованием параметров генератора опорной частоты; и
инициализации или повторной инициализации по меньшей мере одного приемника, соответствующего любой из различных технологий в беспроводном устройстве, с использованием центра частоты и ширины поискового окна.
82. Машиночитаемый носитель по п.76, причем беспроводное устройство включает в себя систему связи и систему спутникового позиционирования.
83. Машиночитаемый носитель по п.82, причем система связи включает в себя по меньшей мере одну из сети CDMA, сети TDMA и сети Wi-Fi.
84. Машиночитаемый носитель по п.82, причем система спутникового позиционирования включает в себя систему глобального позиционирования (GPS).
85. Машиночитаемый носитель по п.79, дополнительно содержащий команды для
приема текущего управляющего значения частоты генератора опорной частоты и текущей оценки частотного смещения генератора опорной частоты;
корректировки принятой оценки частотного смещения генератора опорной частоты;
выполнения проверки работоспособности над скорректированной оценкой частотного смещения генератора опорной частоты; и
определения параметров генератора опорной частоты для сохранения на основе скорректированных параметров частотного смещения генератора опорной частоты.
86. Машиночитаемый носитель по п.85, дополнительно содержащий команды для корректировки принятой оценки частотного смещения, когда параметры генератора опорной частоты были определены и достоверность является достаточной; и
определения погрешности частоты генератора опорной частоты на основе возраста оценки смещения.
87. Машиночитаемый носитель по п.86, дополнительно содержащий команды для сброса текущего значения оценки частотного смещения генератора опорной частоты в нуль и значения погрешности частоты генератора опорной частоты в максимальное значение, когда параметры генератора опорной частоты не были инициализированы или когда достоверность не является достаточной.
| US 6122506 А, 19.09.2000 | |||
| US 2004142701 А1, 22.07.2004 | |||
| US 2004214538 A1, 28.10.2004 | |||
| US 2005079846 A1, 14.04.2005 | |||
| US 6424826 B1, 23.07.2002 | |||
| WO 03098258 A1, 27.11.2003 | |||
| Одноколесная тележка для переноски и перевозки различных предметов | 1930 |
|
SU38432A1 |

