Изобретение относится к области управления работой газотурбинных двигателей и может быть использовано для управления авиационными газотурбинными двигателями (ГТД).
В настоящее время авиационные ГТД, особенно маневренных самолетов, работают практически постоянно на переменных режимах при действии различных внутренних и внешних возмущений, кроме того, для обеспечения высоких тяговых характеристик и минимизации удельного расхода топлива требуется поддержание заданной рабочей линии на характеристиках компрессоров.
Положение направляющих аппаратов компрессоров, используемых в таких ГТД, регулируется различным образом.
Известен способ автоматического регулирования ГТД летательного аппарата, заключающийся в изменении угла установки направляющих аппаратов компрессора в зависимости от температуры торможения потока на входе в ГТД и физических оборотов компрессора, причем дополнительно измеряют на входе ГТД пульсации полного или статического давления, рассчитывают спектральную плотность мощности в рабочем диапазоне частот, сравнивают их мощность на характерных частотах с эталоном на границе газодинамической устойчивости и подают управляющие сигналы в систему автоматического регулирования ГТД для изменения углов установки направляющих аппаратов компрессора.
(см. патент РФ №2118681, кл. F02C 9/28, 1998 г.).
В результате анализа известного способа регулирования ГТД, необходимо отметить, что он характеризуется значительной инерционностью и невысокой точностью, особенно на переходных режимах работы, так как при его осуществлении положение направляющих аппаратов определяется фактически температурой воздуха на входе в ГТД и частотой вращения ротора компрессора, что не обеспечивает при действии возмущений заданного положения рабочей линии на напорной ветке характеристики компрессора и, тем самым, не позволяет сохранить максимальное значение коэффициента полезного действия компрессора и его запасов газодинамической устойчивости.
Известен способ управления положением направляющих аппаратов компрессора ГТД, согласно которому в процессе работы двигателя измеряют параметры потока воздуха, поступающего в компрессор, а именно температуру и давление воздуха на входе, а также частоту вращения ротора компрессора, и отслеживают положение направляющих аппаратов компрессора, сравнивают его с программным значением, по результатам сравнения формируют управляющий сигнал, который подают на исполнительный механизм привода управления направляющими аппаратами компрессора, причем дополнительно измеряют давление воздуха на выходе из компрессора, по значениям температуры воздуха на входе в двигатель и частоты вращения ротора компрессора формируют управляющий сигнал приведенной частоты вращения ротора компрессора, причем дополнительно формируют заданное значение отношения степени сжатия к приведенному расходу воздуха компрессора и заданное значение отношения степени сжатия к приведенному расходу воздуха компрессора, зависящее от температуры воздуха на входе в двигатель, которые суммируют и подают управляющий сигнал на второй вход элемента сравнения, на первый вход которого подают сигнал текущего значения отношения степени сжатия воздуха в компрессоре к приведенному расходу воздуха, формируют сигнал разности программного и текущего значений отношения степени сжатия воздуха в компрессоре к приведенному расходу воздуха и полученный управляющий сигнал подают на исполнительный механизм привода управления направляющими аппаратами компрессора.
(см. патент РФ №2425255, кл. F04D 27/00, 2011 г.) - наиболее близкий аналог.
В результате анализа известного способа необходимо отметить, что при его реализации управление направляющими аппаратами осуществляется на всех режимах только по отношению сигналов разности программного и текущего значений отношения степени сжатия воздуха в компрессоре к приведенному расходу воздуха, что не позволяет обеспечить регулирование положения направляющих аппаратов с высокой точностью, особенно на переходных режимах работы двигателя, так как в зависимости от режима работы двигателя степень влияния каждого параметра, на основании которого формируется управляющий сигнал, различна.
Техническим результатом настоящего изобретения является разработка способа управления положением направляющих аппаратов компрессора ГТД, обеспечивающего регулирование положения направляющих аппаратов, в том числе, на переходных режимах работы с учетом параметров, являющихся наиболее существенными именно для данного режима, и обеспечение за счет этого заданного положения рабочей линии на напорных ветках характеристики компрессора и тем самым сохранение максимального значения коэффициента полезного действия компрессора и его запасов газодинамической устойчивости.
Указанный технический результат обеспечивается тем, что в способе управления положением направляющих аппаратов компрессора газотурбинного двигателя, заключающемся в том, что измеряют температуру воздуха на входе в компрессор, давление воздуха на входе в компрессор и выходе из компрессора, а также частоту вращения ротора компрессора, по значениям температуры воздуха на входе в двигатель и частоты вращения ротора компрессора формируют управляющий сигнал фактической приведенной частоты вращения ротора компрессора, а по отношению давлений за и перед компрессором формируют значение степени сжатия воздуха в компрессоре, новым является то, что дополнительно измеряют расход воздуха через компрессор, задают значение заданной приведенной частоты вращения ротора компрессора, с которым постоянно сравнивают сформированное значение фактической приведенной частоты вращения ротора компрессора, причем, если значение фактической приведенной частоты вращения ротора компрессора меньше заданной, управление положением направляющих аппаратов компрессора осуществляют по значению расхода воздуха, проходящего через компрессор, а если значение фактической приведенной частоты вращения ротора компрессора больше заданной, управление положением направляющих аппаратов компрессора осуществляют по значению степени сжатия воздуха в компрессоре.
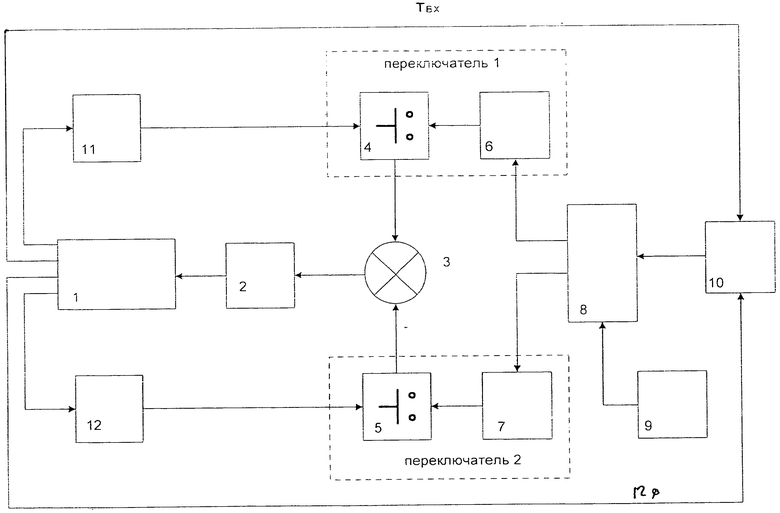
Сущность изобретения поясняется графическим материалом, на котором представлена схема системы управления, реализующей заявленный способ.
Система управления положением направляющих аппаратов компрессора ГТД 1 содержит исполнительный механизм 2 регулирования положения направляющих аппаратов. Исполнительный механизм 2 связан с выходом сумматора 3. Первый и второй входы сумматора 3 связаны соответственно с ключами 4 и 5, управляемыми исполнительными механизмами (соответственно 6 и 7). Ключ и управляющий им исполнительный механизм образуют переключатель. Таким образом, устройство содержит первый переключатель (переключатель 1 на фигуре), содержащий ключ 4 и исполнительный механизм 6, и второй переключатель (переключатель 2 на фигуре), содержащий ключ 5 и исполнительный механизм 7. Исполнительные механизмы 6 и 7 переключателей управляются от элемента сравнения 8, первый вход которого связан с блоком 9 формирования значения заданной приведенной частоты вращения ротора компрессора, а второй - с блоком 10 формирования фактической приведенной частоты вращения ротора компрессора, входы которого связаны с датчиками (не показаны) температуры воздуха (Твх) на входе в двигатель и частоты (nф) вращения ротора компрессора.
Ключ 4 связан с выходом регулятора 11 отношения давления воздуха за компрессором и давления воздуха на входе в компрессор, входы которого связаны с датчиками (не показаны) давлений за и перед компрессором.
Ключ 5 связан с выходом регулятора 12 расхода воздуха (Gв), пропускаемого через компрессор, вход которого связан с датчиком (не показан) расхода воздуха.
Все используемые в устройстве блоки и элементы являются известными и реализуют присущие им функции, их конкретное выполнение не является предметом патентной охраны. Элемент сравнения 8 может быть выполнен различным образом, например, в виде программного блока, реализующего функцию: nф пр≥n° пр.
В качестве исполнительных механизмов 6 и 7 может быть использована широкая гамма известных электрических, электрогидравлических и гидравлических приводных механизмов. Используемые в системе ключи и датчики являются стандартными.
Блок 10 формирования фактической приведенной частоты вращения ротора компрессора может быть конструктивно реализован различным образом, например, в виде цифрового процессора (контроллера), позволяющего вести обработку поступающих в него сигналов (Твх и nф).
Регуляторы 11 и 12 конструктивно могут быть реализованы в виде гидромеханических или цифровых агрегатов.
Способ управления положением направляющих аппаратов компрессора ГТД осуществляется следующим образом.
В процессе работы ГТД и функционирования системы управления положение направляющих аппаратов ГТД 1 регулируется исполнительным механизмом 2.
Посредством регулятора 11, по отношению давлений воздуха за и перед компрессором, формируют управляющий сигнал (πк) и подают его на ключ 4 первого переключателя.
Посредством регулятора 12 по значению расхода воздуха формируют управляющий сигнал (Gв) и подают его на ключ 5 второго переключателя.
В блоке 9 формируют значение заданной приведенной частоты вращения ротора компрессора, которое является постоянным. Данное значение является различным для каждой конкретной модели компрессора и определяется известным для специалистов образом, исходя, в основном, из запасов газодинамической устойчивости.
В блоке 10 в процессе работы двигателя формируется значение фактической приведенной частоты вращения ротора компрессора. Формирование данного параметра осуществляют в зависимости от текущих значений температуры воздуха (Твх) на входе в двигатель и частоты (nф) вращения ротора компрессора. Значение полученной фактической приведенной частоты вращения ротора компрессора сравнивается с заданной блоком 9. До тех пор пока значение фактической приведенной частоты вращения ротора компрессора не превышает заданной блоком 9, на исполнительный механизм 7 второго переключателя с блока сравнения 8 поступает сигнал на замыкание ключа 5, а на исполнительный механизм 6 первого переключателя поступает сигнал на размыкание ключа 4. Таким образом, на первый вход сумматора 3 с ключа 4 первого переключателя поступает нулевой сигнал, а на его второй вход с ключа 5 второго переключателя - сигнал управления (Gв) от регулятора 12, в соответствии с которым исполнительный механизм 2 регулирует положение направляющих аппаратов ГТД 1. Таким образом, пока значение фактической приведенной частоты вращения ротора компрессора не превысило заданной блоком 9, управление направляющими аппаратами осуществляют от регулятора 12 только по сигналу расхода воздуха (Gв).
В случае, если значение фактической приведенной частоты вращения ротора компрессора, выработанное блоком 10, превышает заданную блоком 9, на исполнительный механизм 6 первого переключателя с блока сравнения 8 поступает сигнал на замыкание ключа 4, а на исполнительный механизм 7 второго переключателя поступает сигнал на размыкание ключа 5. На первый вход сумматора 3 с переключателя 4 поступает сигнал управления (πк) от регулятора 11, в соответствии с которым исполнительный механизм 2 регулирует положение направляющих аппаратов ГТД 1, а на исполнительный механизм 7 второго переключателя с блока сравнения 8 поступает сигнал на размыкание ключа. Таким образом, если значение фактической приведенной частоты вращения ротора компрессора превышает заданную блоком 9, управление направляющими аппаратами осуществляют от регулятора 11 только по сигналу степени сжатия воздуха в компрессоре (πк).
Использование данного способа позволяет обеспечить заданное положение рабочей линии на напорных ветках характеристики компрессора и, тем самым, сохранить максимальное значение коэффициента полезного действия компрессора и его запасов газодинамической устойчивости за счет более точного регулирования по расходу воздуха на пониженной частоте вращения ротора компрессора (где более пологие напорные ветки характеристики компрессора πк=f(Gвпр) и более точного регулирования по степени сжатия воздуха в компрессоре на повышенной частоте вращения ротора компрессора (где более вертикальные напорные ветки характеристики компрессора πк=f(Gвпр).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2432501C1 |
| Система управления положением направляющих аппаратов компрессора газотурбинного двигателя | 2019 |
|
RU2711187C1 |
| Способ управления механизацией компрессора газотурбинного двигателя | 2017 |
|
RU2639923C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422682C1 |
| Устройство управления механизацией компрессора газотурбинного двигателя | 2016 |
|
RU2658709C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1990 |
|
SU1760797A1 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора | 2018 |
|
RU2696516C1 |
| Способ управления входным направляющим аппаратом компрессора газотурбинного двигателя | 2022 |
|
RU2795359C1 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления | 2021 |
|
RU2778417C1 |
Изобретение относится к области управления работой газотурбинных двигателей и может быть использовано для управления авиационными газотурбинными двигателями. Способ управления положением направляющих аппаратов компрессора газотурбинного двигателя заключается в том, что по значениям температуры воздуха на входе в двигатель и частоты вращения ротора компрессора формируют управляющий сигнал фактической приведенной частоты вращения ротора компрессора. Задают значение заданной приведенной частоты вращения ротора компрессора, с которым постоянно сравнивают сформированное значение фактической приведенной частоты вращения ротора компрессора, причем, если значение фактической приведенной частоты вращения ротора компрессора меньше заданной, управление положением направляющих аппаратов компрессора осуществляют по значению расхода воздуха, проходящего через компрессор, а если значение фактической приведенной частоты вращения ротора компрессора больше заданной, управление положением направляющих аппаратов компрессора осуществляют по значению степени сжатия воздуха в компрессоре. Изобретение позволяет достичь максимального значения коэффициента полезного действия компрессора и его запасов газодинамической устойчивости. 1 ил.
Способ управления положением направляющих аппаратов компрессора газотурбинного двигателя, заключающийся в том, что измеряют температуру воздуха на входе в компрессор, давление воздуха на входе в компрессор и выходе из компрессора, а также частоту вращения ротора компрессора, по значениям температуры воздуха на входе в двигатель и частоты вращения ротора компрессора формируют управляющий сигнал фактической приведенной частоты вращения ротора компрессора, а по отношению давлений за и перед компрессором формируют значение степени сжатия воздуха в компрессоре, отличающийся тем, что дополнительно измеряют расход воздуха через компрессор, задают значение заданной приведенной частоты вращения ротора компрессора, с которым постоянно сравнивают сформированное значение фактической приведенной частоты вращения ротора компрессора, причем, если значение фактической приведенной частоты вращения ротора компрессора меньше заданной, управление положением направляющих аппаратов компрессора осуществляют по значению расхода воздуха, проходящего через компрессор, а если значение фактической приведенной частоты вращения ротора компрессора больше заданной, управление положением направляющих аппаратов компрессора осуществляют по значению степени сжатия воздуха в компрессоре.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2425255C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422682C1 |
| RU 97107079 А, 27.02.1999 | |||
| Приспособление к телефонам для устранения действия постороннего шума | 1927 |
|
SU7599A1 |
| US 5832714 А, 10.11.1998 | |||
| EP 0646704 A1, 05.04.1995 | |||
| US 5732546 А, 31.03.1998. | |||

