Изобретение относится к области управления работой газотурбинных двигателей и может быть использовано для регулирования положения направляющих аппаратов компрессора газотурбинного двигателя (ГТД).
Известна система управления ГТД, обеспечивающая регулирование подачи топлива и положения направляющих аппаратов компрессора, содержащая электронный цифровой регулятор, связанный с основным регулятором подачи топлива в камеру сгорания и с резервным регулятором, выходы регуляторов связаны с селектором переключения, который связан с дозатором топлива. Резервный регулятор выполнен в виде гидрозамедлителя, центробежного чувствительного элемента, регулятора отношений давлений перед - и за компрессором, регулятора направляющих аппаратов.
В процессе работы системы регулятор подачи топлива осуществляет управление дозатором по команде электронного цифрового регулятора. При работе резервного регулятора, он осуществляет регулирование подачи топлива и управление механизацией компрессора по заданным двигательным параметрам.
(см. патент РФ на полезную модель №37528, кл. F02C 7/22, 2004 г.).
В результате анализа известной системы управления ГТД необходимо отметить, что она не обеспечивает эффективного регулирования положения направляющих аппаратов, так как обладает невысоким быстродействием и надежностью. Кроме того, точность регулирования положения направляющих аппаратов при использовании данной системы весьма невысока.
Известна система управления положением направляющих аппаратов компрессора ГТД, содержащая привод регулирования положения направляющих аппаратов, связанный с выходом элемента управления (сумматора), первый и второй входы которого связаны с ключами, управляемыми исполнительными механизмами. Ключ и управляющий им исполнительный механизм образуют переключатель. Система содержит первый и второй переключатели. Исполнительные механизмы переключателей управляются от элемента сравнения, первый вход которого связан с блоком формирования заданной приведенной частоты вращения ротора компрессора, а второй - с блоком формирования фактической приведенной частоты вращения ротора компрессора, входы которого связаны с датчиками (не показаны) температуры воздуха на входе в двигатель и частоты вращения ротора компрессора.
Ключ первого переключателя связан с выходом регулятора отношения давления воздуха за компрессором и давления воздуха на входе в компрессор, входы которого связаны с датчиками давлений за и перед компрессором.
Ключ второго переключателя связан с выходом регулятора расхода воздуха, пропускаемого через компрессор, вход которого связан с датчиком расхода воздуха.
В процессе работы системы один регулятор по отношению давлений воздуха за и перед компрессором формирует управляющий сигнал и подает его на ключ первого переключателя. Другой регулятор по значению расхода воздуха формирует управляющий сигнал и подает его на ключ второго переключателя.
Параллельно, с блока формирования заданной приведенной частоты вращения ротора компрессора, сформированный постоянный сигнал заданной частоты вращения ротора поступает на первый вход элемента сравнения. На входы блока формирования фактической приведенной частоты вращения ротора с датчиков поступают текущие значения температуры воздуха на входе в двигатель и частоты вращения ротора компрессора. В блоке сравнения постоянно сравниваются значения данных сигналов. До тех пор, пока фактическое значение приведенной частоты вращения ротора не превышает заданной блоком, на исполнительный механизм второго переключателя с блока сравнения поступает сигнал на замыкание управляемого им ключа, а на исполнительный механизм первого переключателя поступает сигнал на размыкание управляемого им ключа. Таким образом, на первый вход сумматора с ключа первого переключателя поступает нулевой сигнал, а на его второй вход с ключа второго переключателя сигнал управления от регулятора, в соответствии с которым исполнительный механизм регулирует положение направляющих аппаратов ГТД. Таким образом, пока фактическое значение приведенной частоты вращения ротора компрессора не превысило заданной блоком, управление направляющими аппаратами осуществляется от регулятора только по сигналу расхода воздуха.
В случае, если фактическое значение приведенной частоты вращения ротора превышает заданную, на исполнительный механизм первого переключателя с блока сравнения поступает сигнал на замыкание ключа, а на исполнительный механизм второго переключателя поступает сигнал на размыкание ключа. На первый вход сумматора с переключателя поступает сигнал управления от регулятора, в соответствии с которым исполнительный механизм регулирует положение направляющих аппаратов ГТД, а на исполнительный механизм второго переключателя с блока сравнения поступает сигнал на размыкание ключа.
(см. патент РФ на полезную модель №112725, кл. F02C 7/26, 2011 г.) - наиболее близкий аналог.
В результате анализа данной системы необходимо отметить, что она позволяет обеспечить заданное положение рабочей линии на напорных ветках характеристики компрессора и тем самым обеспечить довольно высокий коэффициент полезного действия компрессора и его запасы газодинамической устойчивости за счет более точного регулирования по расходу воздуха на пониженной частоте вращения ротора компрессора. Однако данная система не предусматривает возможности регулирования положения направляющих аппаратов при отказе одного из элементов ее привода.
Техническим результатом настоящего изобретения является разработка системы управления положением направляющих аппаратов компрессора ГТД, обеспечивающей повышенную надежность управления
направляющими аппаратами, а также высокую точность регулирования в широких пределах регулирования за счет повышения точности позиционирования направляющих аппаратов.
Указанный технический результат обеспечивается тем, что в системе управления положением направляющих аппаратов компрессора газотурбинного двигателя, содержащей привод регулирования положения направляющих аппаратов, блок управления, соединенный с блоком датчиков измерения параметров работы газотурбинного двигателя, первый и второй переключатели, управляемые исполнительными механизмами, связанными с блоком управления, новым является то, что система оснащена третьим переключателем, управляемым от логического блока, связанным с первым и вторым переключателями, привод регулирования положения направляющих аппаратов выполнен в виде двух гидроцилиндров, подвижные элементы которых оснащены датчиками их положения, связанными с блоком управления, и кинематически связаны с кольцевым приводом лопаток направляющих аппаратов компрессора, причем система оснащена двумя электрогидроусилителями, связанными с блоком управления, каждый из которых через переключатели выполнен с возможностью управления одним или двумя гидроцилиндрами, при этом входы логического блока связаны с выходами исполнительных механизмов управления первым и вторым переключателями.
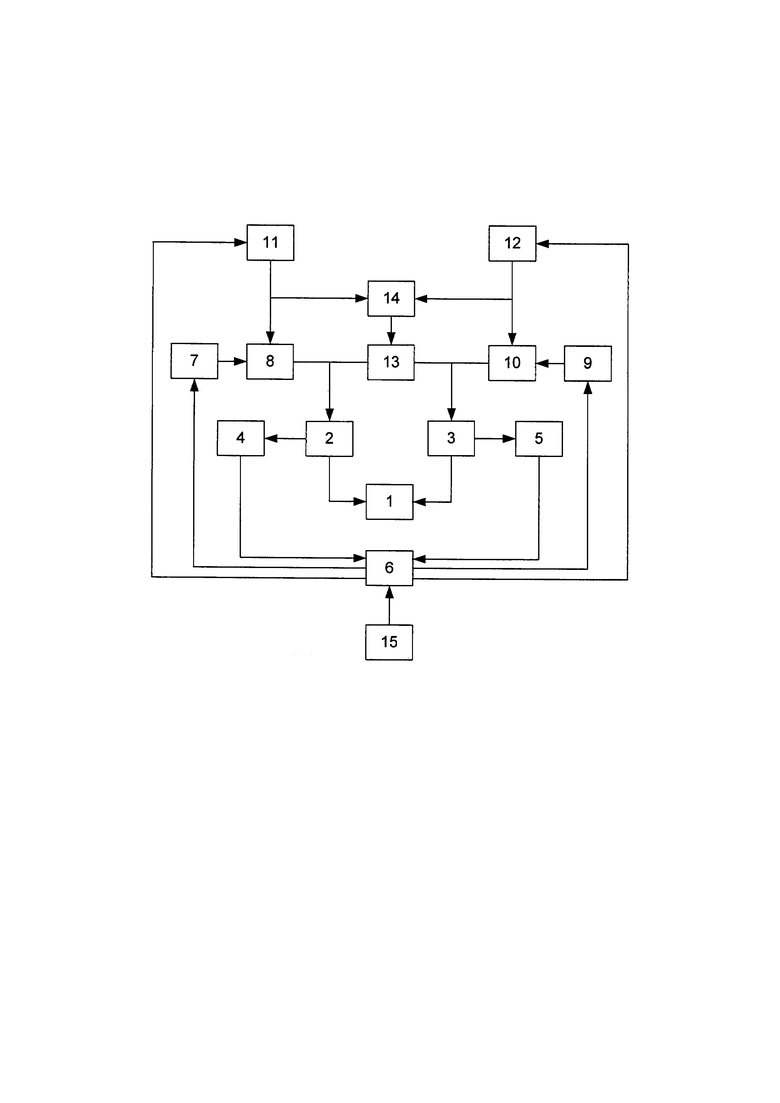
Сущность изобретения поясняется графическими материалами, на которых представлена схема заявленной системы.
Система содержит кольцевой привод 1 поворота лопаток направляющих аппаратов компрессора (не показаны). Кольцевой привод кинематически связан с гидроцилиндрами (ГЦ) 2 и 3 регулирования его положения. Гидроцилиндры расположены так, что их подвижные элементы (штоки) шарнирно связаны с кольцом в двух оппозитно расположенных точках.
Подвижный элемент ГЦ 2 оснащен датчиком 4 его положения, а подвижный элемент ГЦ 3 - датчиком 5. Выходы датчиков 4 и 5 связаны с входами блока управления (например, электронного регулятора) 6. ГЦ 2 связан с электрогидроусилителем (ЭГУ) 7 через первый переключатель 8. ГЦ 3 связан с ЭГУ 9 через второй переключатель 10. ЭГУ 7 и 9 управляются от электронного регулятора 6.
Положение переключателя 8 задается исполнительным механизмом, например, электрогидроклапаном (ЭГК) 11, а переключателя 10 - ЭГК 12. ЭГК 11 и 12 управляются электронным регулятором 6.
Система оснащена третьим переключателем 13, соединенным с выходными контактами переключателей 8 и 10. Таким образом, ГЦ 2 имеет возможность соединения с ЭГУ 9 через переключатели 10 и 13, а ГЦ 3 имеет возможность соединения с ЭГУ 7 через переключатели 8 и 13. Переключатель 13 управляется логическим элементом «И» (логическим блоком) 14, входами связанным с выходами ЭГК 11 и 12.
Блок управления 6 связан входами с датчиками, условно показанными на графических материалах в виде блока 15. В качестве датчиков могут быть использованы различные датчики, например, температуры воздуха на входе в компрессор, частоты вращения ротора и пр.
Все используемые в системе блоки и элементы, являются известными и реализуют присущие им функции, их конкретное выполнение не является предметом патентной охраны.
В качестве исполнительных механизмов может быть использована широкая гамма известных электрических, электрогидравлических и гидравлических приводных механизмов. Используемые в системе ЭГК, ЭГУ и датчики являются стандартными и могут быть реализованы в виде гидромеханических или цифровых агрегатов.
Переключатели 8, 10, 13 представляют собой золотники. Когда под торец золотника подается управляющее давление, он смещается и своими окнами перекрывает магистрали, связывающие выход ЭГУ с штоковой и бесштоковой полостями гидроцилиндров.
Конструктивно переключатели 8 и 10 выполнены нормально закрытыми, а переключатель 13 - нормально открытым.
Блок управления 6 представляет собой стандартный электронный регулятор.
Система управления положением направляющих аппаратов компрессора ГТД работает следующим образом.
Электронный регулятор 6 подает питание на ЭГК 11 и ЭГК 12, при этом переключатели 8 и 10 замыкаются и подключают ЭГУ 7 и ЭГУ 9 к управлению ГЦ 2 и ГЦ 3, соответственно. Одновременно на выходе логического элемента «И» 14 появляется управляющий сигнал, который переводит переключатель 13 в разомкнутое положение, тем самым отсекая управление ЭГУ 7 от ГЦ 3, а ЭГУ 9 от ГЦ 2, обеспечивая независимое управление каждым из ГЦ.
Электронный регулятор 6 по показаниям датчиков 4, 5 и датчиков блока 15 по известным зависимостям формирует одинаковое для обоих ГЦ 2 и 3 заданное значение положения их подвижных элементов. Заданное значение сравнивается с сигналами датчиков блока 15 и на ЭГУ 7 и 9 подается сигнал управления, пропорциональный разности заданного и фактического положений, в результате чего ГЦ 2 и 3 синхронно устанавливают кольцевой привод 1 в заданное положение. При этом исключаются перекосы кольца из-за сил трения (что имеет место при перемещении кольца одним гидроцилиндром, когда величина перекоса может достигать (10…20)% полного хода гидроцилиндра).
В случае отказа одного из контуров позиционирования, например, из-за засорения ЭГУ 7, электронным регулятором 6 регистрируется повышенная неустранимая разность значений между заданным и фактическим положениями подвижного элемента ГЦ 2, в результате чего блок управления 6 обесточивает ЭГК 11. В результате переключатель 8 переводится в разомкнутое положение и отключает ЭГУ 7 от управления ГЦ 2. Одновременно снимается сигнал с выхода логической схемы «И», в результате чего переключатель 13 замыкается и подключает выход ЭГУ 9 к ГЦ 2. ЭГУ 9 начинает управлять двумя гидроцилиндрами (ГЦ 2 и ГЦ 3). В результате управление направляющими аппаратами сохраняется без снижения точности установки кольца привода 1.
В случае отказа контура позиционирования ГЦ 3, блок управления обесточивает ЭГК 12 и управление ГЦ 2 и ГЦ 3 осуществляется от ЭГУ 7.
Использование данной системы позволяет обеспечить точное позиционирование направляющих аппаратов компрессора ГТД и повышение надежности управления направляющими аппаратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422682C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2488009C2 |
| Система подачи топлива в камеру сгорания авиационного газотурбинного двигателя | 2017 |
|
RU2636360C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| Система автоматического управления авиационного газотурбинного двигателя | 2017 |
|
RU2648479C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2652267C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2432501C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2018 |
|
RU2706518C1 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора | 2018 |
|
RU2696516C1 |
Изобретение относится к области управления работой газотурбинных двигателей и может быть использовано для регулирования положения направляющих аппаратов компрессора газотурбинного двигателя (ГТД). Техническим результатом настоящего изобретения является разработка системы управления положением направляющих аппаратов компрессора ГТД, обеспечивающей повышенную надежность управления направляющими аппаратами, а также высокую точность регулирования в широких пределах регулирования за счет повышения точности позиционирования направляющих аппаратов. Указанный технический результат обеспечивается тем, что в системе управления положением направляющих аппаратов компрессора газотурбинного двигателя, содержащей привод регулирования положения направляющих аппаратов, блок управления, соединенный с блоком датчиков измерения параметров работы газотурбинного двигателя, первый и второй переключатели, управляемые исполнительными механизмами, связанными с блоком управления, новым является то, что система оснащена третьим переключателем, управляемым от логического блока, связанным с первым и вторым переключателями, привод регулирования положения направляющих аппаратов выполнен в виде двух гидроцилиндров, подвижные элементы которых оснащены датчиками их положения, связанными с блоком управления, и кинематически связаны с кольцевым приводом лопаток направляющих аппаратов компрессора. Причем система также оснащена двумя электрогидроусилителями, связанными с блоком управления, каждый из которых через переключатели выполнен с возможностью управления одним или двумя гидроцилиндрами, при этом входы логического блока связаны с выходами исполнительных механизмов управления первым и вторым переключателями. 1 ил.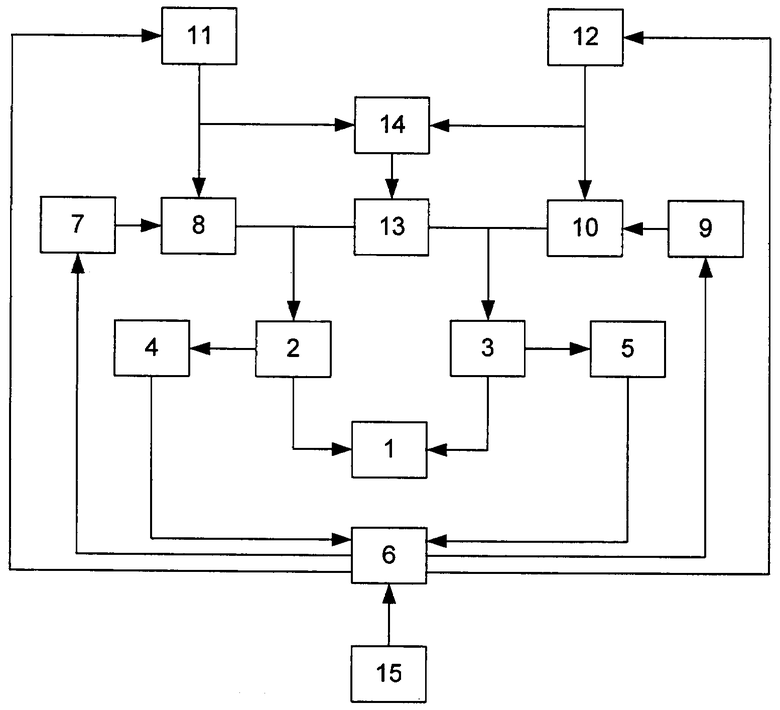
Система управления положением направляющих аппаратов компрессора газотурбинного двигателя, содержащая привод регулирования положения направляющих аппаратов, блок управления, соединенный с блоком датчиков измерения параметров работы газотурбинного двигателя, первый и второй переключатели, управляемые исполнительными механизмами, связанными с блоком управления, отличающаяся тем, что система оснащена третьим переключателем, управляемым от логического блока, связанным с первым и вторым переключателями, привод регулирования положения направляющих аппаратов выполнен в виде двух гидроцилиндров, подвижные элементы которых оснащены датчиками их положения, связанными с блоком управления, и кинематически связаны с кольцевым приводом лопаток направляющих аппаратов компрессора, причем система оснащена двумя электрогидроусилителями, связанными с блоком управления, каждый из которых через переключатели выполнен с возможностью управления одним или двумя гидроцилиндрами, при этом входы логического блока связаны с выходами исполнительных механизмов управления первым и вторым переключателями.
| Способ консервирования плодовых и ягодных соков | 1957 |
|
SU112725A1 |
| Устройство для сигнализации об истечении времени сушки в сушильных прессах | 1932 |
|
SU37528A1 |
| Трубогибочный станок | 1952 |
|
SU97455A1 |
| US 6758044 B2, 06.07.2004. | |||

