Область техники
Изобретение относится к приборостроению, а именно к акселерометрии, измерению микроускорений на космических объектах.
Уровень техники
Акселерометры пьезоэлектрического типа широко распространены, но при всех своих достоинствах (высокой чувствительности, ударопрочности, малогабаритности) имеют минимальную частоту регистрации не ниже 0,3 Гц [Фрайден Дж. Современные датчики. Справочник. Изд. «Техносфера». М., 2005, 592 стр.).
Это делает их непригодными для регистрации ультранизких частот, и тем более для регистрации постоянных малых ускорений. Пъезоэлекрические акселерометры фирмы Brucl & Kjaer [Датчики малых ускорений компании Freescale Semiconductor. Сыров Л. Компоненты и технологии, №2, 2010 г.] гарантируют работу некоторых своих датчиков начиная с 0,1 Гц, но большинство типов этих датчиков работают, начиная с 1 Гц. Аналогичные данные приводит фирма «Пъезоприбор», датчики которой имеют нижнюю частоту 0,3…0,7 Гц, и фирма ZETLab с диапазоном частот 0,5…5000 Гц. Фирма MEMSIG dsgeerftn двухосевые датчики ускорения в виде комплементарных микросхем MXD2020G/H и MXD2020M/N с чувствительностью 1·10-3 g и диапазоном частот 17…160 Гц.
Хотя в рекламных проспектах некоторых фирм и заявлен диапазон частот от 0 Гц, но это невозможно для пьезоэлектрических акселерометров, а только акселерометров с емкостными, а также тензометрическими преобразователями. К недостаткам емкостных акселерометров относится невысокая чувствительность - 1200 мВ/g, что в пересчете дает величину, близкую к 1·10-3 g.
В последнее время все активнее применяются конвективные акселерометры и сейсмографы, причем в ряде случаев такие приборы оформлены в виде корпусов микросхем (например, изделия фирмы MEMSIG]. Первые приборы имели чувствительность порядка 1 Mg(10-3 g), впоследствии эта величина была увеличена на два порядка.
Кроме сейсмонриемников, использующих конвекцию, для измерения ускорений на орбите МКС был создан конвективный датчик ДАКОН-2, рассчитанный на чувствительность 10-6g.(патент RU 2379693, MHK G01P 15/08, опубл. 20.01.10 г.).
Среднее время установления показаний конвективного датчика ДАКОН-2 составляет не менее одного часа (пат. РФ №2421735 MHK G01P 15/08, опубл. 20.06.11 г.).
Поэтому была поставлена задача создания высокочувствительного прибора с малым временем установления показаний на основе так называемого картезианского водолаза (KB).
Существует конструкция маятникового поплавкового акселерометра со встроенными в поплавки маятниками, магнитными датчиками угла поворота и компенсаторами трения в цапфах. Акселерометр гидростатический, содержит корпус, внутри которого размещен поплавковый маятниковый чувствительный элемент и систему измерения. Данный акселерометр взят нами за прототип [SU 1839858 А1 MHK G01P 15/08, опубл. 20.06.06 г.].
Этот акселерометр обладает двумя недостатками, особенно проявляющимися в процессе измерения малых перегрузок при вертикальном положении измерительной оси чувствительного элемента:
- нечувствительность, определяемая пленкой, образующейся на камниевой опоре в результате использования в конструкции чувствительного элемента различных органических веществ;
- погрешность из-за относительно большого времени достижения становившеегося значения выходной информации акселерометра при изменении ориентации измерительной оси вследствие большой вязкости из-за несмешиваемости жидкости, заполняющей чувствительный элемент при малых скоростях движения его подвижной системы («выход на режим»).
Задачей создания изобретения является разработка простой конструкции прибора обладающего большей точностью измерений.
Поставленная задача решается с помощью признаков указанных в 1-м пункте формулы изобретения общих с прототипом, таких как акселерометр гидростатический, содержащий корпус, внутри которого размещен поплавковый маятниковый чувствительный элемент и систему измерения, и отличительных, существенных признаков, таких как корпус заполнен рабочей жидкостью, в которую помещен чувствительный элемент в виде пористой сферы, внутри которой размещен герметизированный сильфон с дополнительными грузами в виде маятника, обеспечивающие поплавку состояние, близкое к нейтральной плавучести, при этом для изменения давления внутри корпуса с целью изменения скорости и направления движения поплавка-сферы акселерометр снабжен дополнительным сильфоном, установленным в нижней части корпуса между катушками и сердечником электромагнита, подключенного к блоку управления и регистрации, а для замера скорости перемещения сферы на стенках корпуса установлены излучающий и приемный пъезоэлементы излучения и приема ультразвуковых волн, подключенные к блоку приема и регистрации.
Согласно п.2 формулы изобретения в качестве рабочей жидкости используют дистиллированную воду.
Вышеперечисленная совокупность существенных признаков позволяет получить следующий технический результат - упрощение конструкции, повышение точности работы прибора за счет низкой вязкости рабочей жидкости.
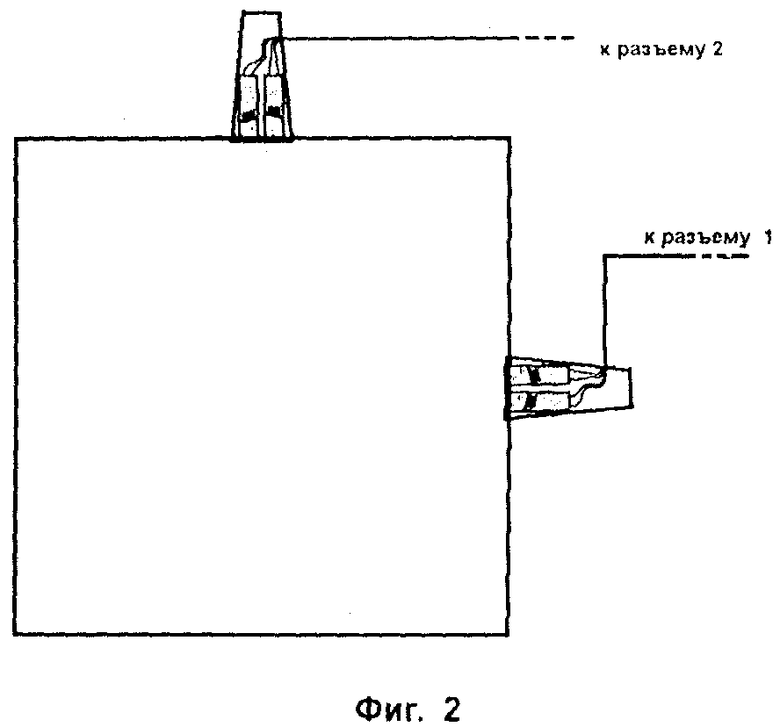
Изобретение иллюстрируется следующими чертежами. На фиг.1 приведена схема предлагаемого прибора; на фиг.2 - размещение пъезоэлементов, вид сверху.
Акселерометр гидростатический (фиг.1) содержит корпус 1, внутри которого размещен поплавковый маятниковый чувствительный элемент и систему измерения. Корпус 1 заполнен рабочей жидкостью, в которую помещен чувствительный элемент в виде пористой сферы 2, внутри которой размещен герметизированный сильфон 3 с дополнительными грузами 4 в виде маятника, обеспечивающие поплавку состояние, близкое к нейтральной плавучести.
Для изменения давления внутри корпуса с целью изменения скорости и направления движения поплавка-сферы 2 акселерометр снабжен дополнительным сильфоном 5, установленным в нижней части корпуса 1 между катушками 6 и сердечником 7 электромагнита, подключенного к блоку управления и регистрации 8.
Для замера скорости перемещения сферы 2 на стенках корпуса 1 установлены излучающий 9 и приемный 10 пъезоэлементы излучения и приема ультразвуковых волн, подключенные к блоку приема и регистрации 8. В акселерометре в качестве рабочей жидкости используют дистиллированную воду 11.
В предлагаемой конструкции рабочая ячейка 1, в отличие от прототипа, где требуется диамагнитная жидкость (обычно органические жидкости типа бензола, октана), заполняется дистиллированной водой, что упрощает подбор материалов для изготовления измерительной ячейки и прокладок внутри нее.
Действие картезианского водолаза (KB) основано на следующем принципе. Сумма внешнего и гидростатического давлений сжимает сильфон 2 внутри полости KB, при этом объем газа уменьшается, в результате чего уменьшается и сила Архимеда. Соотношение между силами тяжести и Архимеда получаем из уравнения состояния идеального газа. Суммарное давление в жидкости Рсум на глубине погружения z равно:

где P0 - давление газа на поверхности раздела жидкость - газ, ρж - плотность жидкости, g - ускорение свободного падения в системе. Размеры тела KB по сравнению с глубиной погружения z считаем малыми.
Процесс считаем изотермическим. Для идеального газа условие постоянства массы дает следующее соотношение объемов и давлений

здесь Vz0 и Vz - объемы газа в сильфоне вблизи поверхности жидкости (z=0) и при погружении тела на глубину z. Чтобы учесть упругость сильфона, оценим разность давлений внутри сильфона и снаружи него. Предполагаем, что сильфон находится в состоянии сжатия, то есть увеличение внешнего давления уменьшает объем сильфона, что эквивалентно сжатию пружины. Суммарный перепад между внешним давлением на основание сильфона и на боковые стенки и внутренним Рвнутр будем считать пропорциональным давлению снаружи сильфона Рнар=Рсум:

где κ - коэффициент пропорциональности, или

Учитывая (2), рассчитаем связь давления в сильфоне Рг с глубиной погружения z следующим образом

Уравнение равновесия с учетом изменения объема сильфона запишется следующим образом (величину g в выражении опускаем)

Здесь Vm - объем тела (сетчатая сфера 2), ρm плотность материала тела, mc - масса сильфона; ρс - плотность материала сильфона, Vг - объем газа внутри сильфона, ρг·Vг=mг=conct - масса газа внутри сильфона. В объем тела включена и масса дополнительного груза 4.
Связь ускорения, наблюдаемого в системе, с глубиной погружения и другими параметрами получает следующее выражение
Достижение равновесия может оказаться длительным процессом, поэтому была поставлена цель измерения ускорения более оперативным способом. Для этого используем уравнение движения погруженного тела. Предположим, что сила трения для тела сферической формы при малых скоростях движения пропорциональна скорости движения и коэффициенту вязкости жидкости: Fmp=-χ·η·W, где χ - коэффициент пропорциональности, η - коэффициент динамической вязкости, W - скорость движения сферы в жидкости. Баланс сил тяжести и сил Архимеда в данной системе имеет вид:

Здесь F1 - суммарная сила, действующая на поплавок KB (сферу 2). Масса жидкости, подвергающаяся ускорению, равна

Здесь 
Скорость установившегося движения тела вычислим при нулевом ускорении:

Из этого выражения определяется ускорение g
Опыты с KB показали, что силы трения при движении сетчатого тела достаточно велики, поэтому будем считать, что установившееся значение скорости Wуст достигается за пренебрежимо малое время.
Отсутствие опор упрощает предлагаемое устройство, исключается трение в опорах; исключается и источник вибраций, что влечет за собой повышение точности прибора.
Акселерометр работает следующим образом.
Через определенные интервалы времени электронный блок управления 8 подает ток в катушку электромагнита 6, сердечник электромагнита 7 втягивается внутрь катушки 6 и сжимает дополнительный сильфон 5. При этом давление в измерительной ячейке возрастает, сильфон 3 уменьшается в объеме, и поплавок 2 начинает тонуть (перемещаться но направлению действия ускорения). Одновременно блок управления 8 включает три ультразвуковых излучателя 9 и приемники 10. Каждый из них определяет расстояние от сферы 2 до каждого из датчиков по осям координат. Блок 8 таким образом определяет скорость Wуст, величины χ, η являются константами, величину F1 определяют предварительными замерами и расчетами.
Скорость погружения определяет величину и направление.
В конечном итоге вычисляются 3 компоненты ускорения через 3 компоненты установившейся скорости. После отключения электромагнита 5 поплавок 2 всплывает, перемещаясь уже против направления суммарного ускорения и тем самым возвращаясь в первоначальное состояние.
Из описания и практического применения настоящего изобретения специалистам будут очевидны и другие частные формы его выполнения. Данное описание и примеры рассматриваются как материал, иллюстрирующий изобретение, сущность которого и объем патентных притязаний определены в нижеследующей формуле изобретения, совокупностью существенных признаков и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Поплавковый маятниковый компенсационный акселерометр | 1982 |
|
SU1080089A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ОТКЛОНЕНИЯ ЗАДАННОГО НАПРАВЛЕНИЯ ОТ ВЕРТИКАЛИ И ПОПЕРЕЧНЫХ УСКОРЕНИЙ ПОСРЕДСТВОМ ГИДРОДИНАМИЧЕСКИХ ГИРОСКОПОВ, СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА С АКСИАЛЬНЫМ СМЕЩЕНИЕМ ЦЕНТРА МАСС И СПОСОБ ОПРЕДЕЛЕНИЯ ЕГО ПЛАВУЧЕСТИ | 2004 |
|
RU2269097C1 |
| СПОСОБ ИССЛЕДОВАНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ ПОСРЕДСТВОМ ГИРОСКОПИЧЕСКОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2004 |
|
RU2274831C1 |
| Поплавковый маятниковый акселерометр | 1981 |
|
SU1040425A1 |
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ БИОЛОГИЧЕСКОЙ ТЕКУЧЕЙ СРЕДЫ И/ИЛИ МЕМБРАННОГО СОПРОТИВЛЕНИЯ | 2012 |
|
RU2609460C2 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| Чувствительный элемент поплавкового гирокомпаса | 1990 |
|
SU1810762A1 |
Изобретение относится к приборостроению, а именно к акселерометрам. Акселерометр содержит измерительную ячейку в форме прямоугольного параллелепипеда, пористую сферу, внутри которой размещен герметизированный сильфон с дополнительными грузами. В нижней части ячейки прикреплены дополнительный сильфон, катушка электромагнита, сердечник, а также три пары пьезоэлементов (попарно излучатели и приемники). Изобретение позволяет упростить конструкцию и повысить точность измерений. 1 з.п. ф-лы, 2 ил.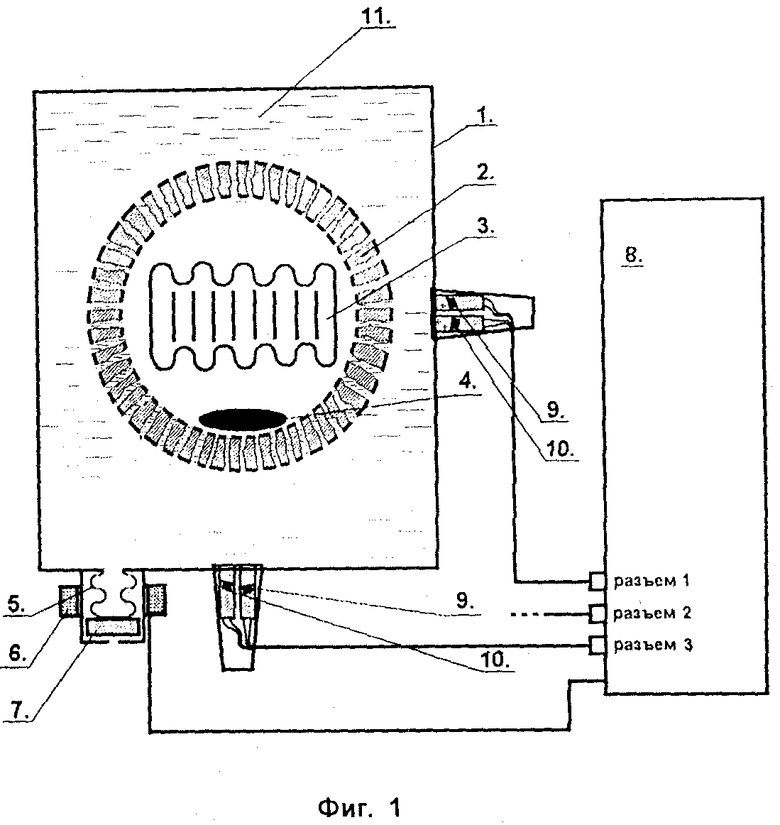
1. Акселерометр гидростатический, содержащий корпус, внутри которого размещен поплавковый маятниковый чувствительный элемент, и систему измерения, отличающийся тем, что корпус заполнен рабочей жидкостью, в которую помещен чувствительный элемент в виде пористой сферы, внутри которой размещен герметизированный сильфон с дополнительными грузами в виде маятника, обеспечивающими поплавку состояние, близкое к нейтральной плавучести, при этом для изменения давления внутри корпуса с целью изменения скорости и направления движения поплавка-сферы акселерометр снабжен дополнительным сильфоном, установленным в нижней части корпуса между катушками и сердечником электромагнита, подключенного к блоку управления и регистрации, а для замера скорости перемещения сферы на стенках корпуса установлены излучающий и приемный пьезоэлементы излучения и приема ультразвуковых волн, подключенные к блоку приема и регистрации.
2. Акселерометр по п.1, отличающийся тем, что в качестве рабочей жидкости используют дистиллированную воду.
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1978 |
|
SU1839858A1 |
| УСТРОЙСТВО ДЛЯ КОНЦЕНТРАЦИИ ЗВУКОВЫХ ВОЛН | 1939 |
|
SU77446A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2122743C1 |
| АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ | 1994 |
|
RU2082174C1 |
| JP 63145967 A, 18.06.1988 | |||
| JP 63145968 А, 18.06.1988. | |||

