Изобретение относится к приборостроению, а именно к конструкции наиболее прецизионных датчиков линейных ускорений - поплавковых мастниковых компенсационных акселерометров (ПМКА).
Известна конструкция ПМКА, содержащая герметичный корпус, заполненный поддерживающей демпфирующей рабочей жидкостью, в которой взвешена поплавковая подвижная система (подьпгьч ный узгел) , выполненная в виде цилиндрического поплавка, на котором жестко закреплены роторы датчика угла и датчика момента. Датчик угла через электронный усилитель и эталонное выходное сопротивление соединен с датчиком момента, образуя контур разгрузки (контур компенсации), так называемую электрическую пружину. Средний удельный вес подвижного узла подбирается равным удельному весу рабочей жидкости с высотой степенью точности. Благодаря этому обеспечивается гидростатическая разгрузка камниевых опор Cl и 2.
При использовании ПМКА в качестве навигационных акселерометров инерциальных навигационных систем имеются составляющие ускорения, направленные не только по инерционная оси fj акселерометра, но и по оси маятника и по оси подвеса подвижного узла .
Даже при идеальном взвешивании поплавковой подвижной системы в рабочей поддерживающей жидкости в ее опорах появляются реакции, прямо пропорционально влияющие на момент трения в прецизионных опорах подвижного узла, таких как камниевые опоры или виброопоры.
Таким образом, при. наличии ускорения по оси подвеса ПМКА в его опорах увеличивается момент трения, т.е. погрешность работы акселерометра.
Цель изобретения - повышение точности работы прибора.
Указанная цель достигается тем, что в поплавковом маятниковом компенсационном акселерометре, состоящем из заполненного рабочей жидкостью герметичного корпуса, взвешенного в жидкости поплавкового -маятникового подвижного узла, опор подвижного узла, датчиков угла и момента, соединенных через электронный усилитель, и и.з узла термостатирования, в подвижном узле выполнены два диаметрально расположенных сквозных отверстия с осями, паралпельными оси подвеса подвижного узла, заполненных ферромагнитной жидкостью, соосно указанным отверстиям расположены торцы полюсов магнитной системы, причем плотность
ферромагнитной жидкости в одном из отверстий выбрана большей, в другом отверстии;, меньшей, чем плотность рабочей жидкости.
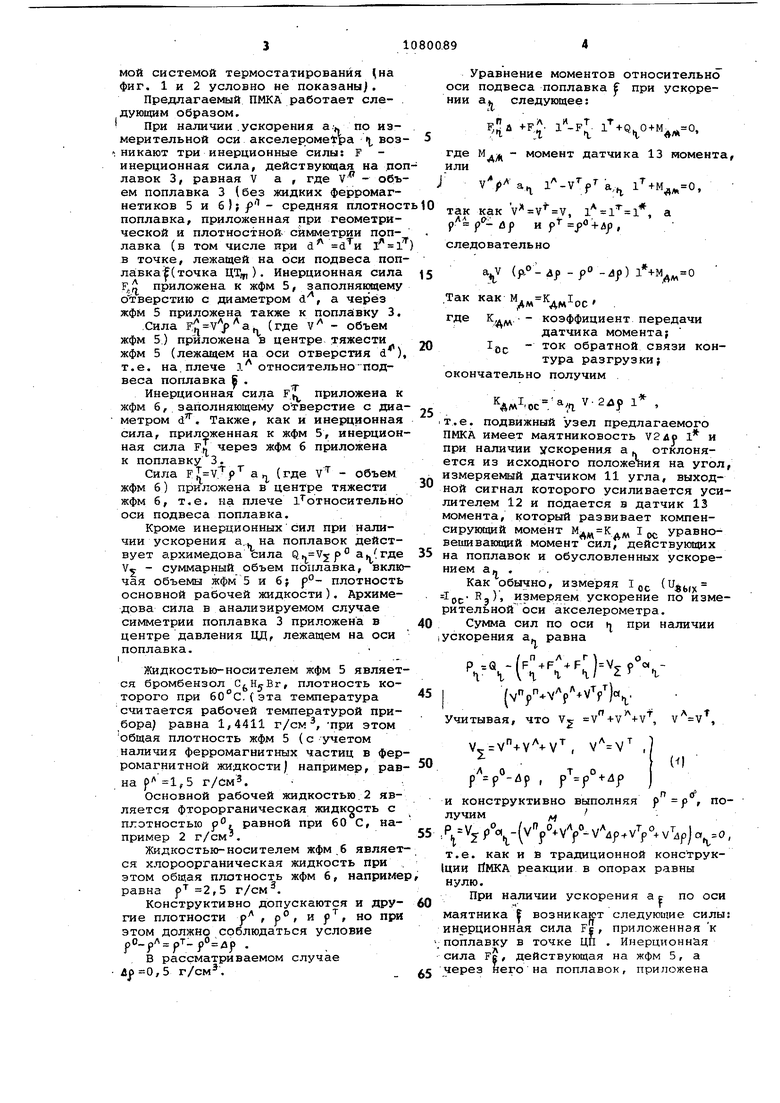
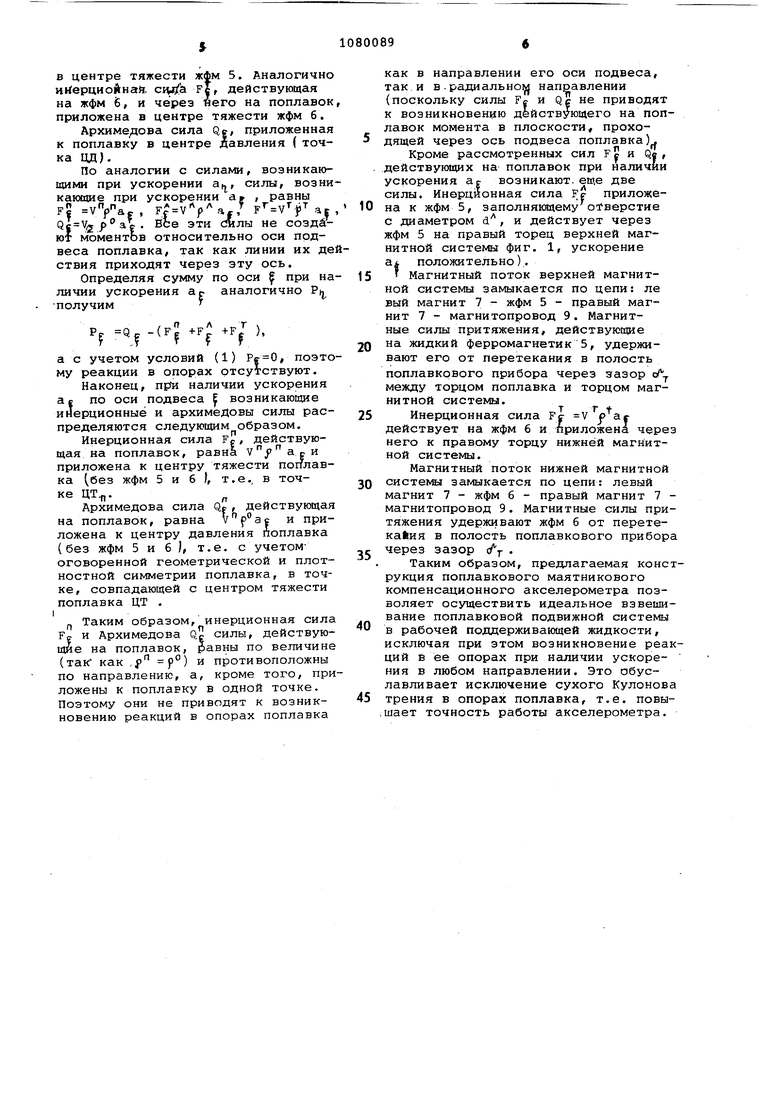
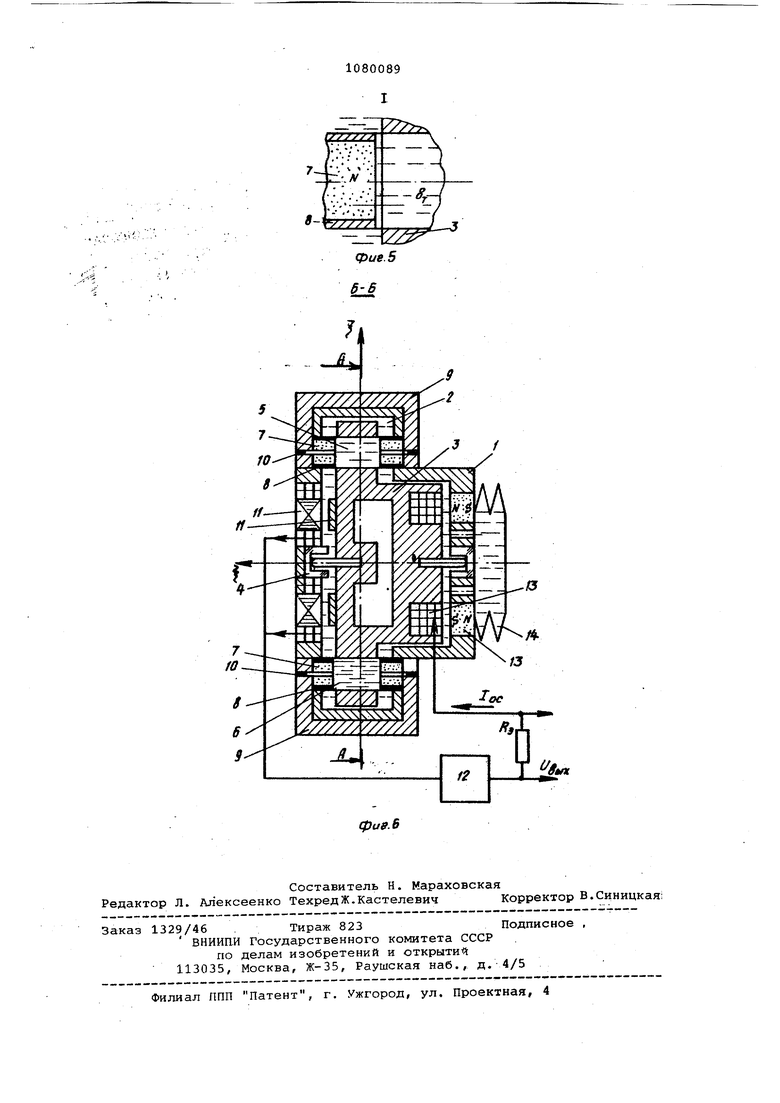
На фиг. 1 представлена принципиальная схема подвеса поплавкового узла предлагаемого ПМКА на фиг. 2 конструктивная схема П-МКА (сечение Г-Г на фиг. на фиг. 3 - сечение А-А на фиг. 2; На фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - узел I на фиг. 2; на фиг. 6 - конструктивное выполнение устройства.
ПМКА состоит из герметичного корпуса 1, заполненногоОСНОВНОЙ рабочей жидкостью 2 с плотностью
(1,8 t 2,0 )г/см (обычная фторорганическая рабочая жидкость), и взвешенного в ней поплавкового узла 3, центрируемого опорами 4,
В поплавковом узле имеются цилиндрические сквозные отверстия диаметрами d и d, оси которых расположены на расстояниях l и 1 от оси поплавка, являющейся одновременно и осью его подвеса, заполненные ферро магнитными жидкостями (жфм). При этом жфм 5, заполняющий отверстие с диаметром d, выполнен на основе жидкости-носителя с плотностью, меншей, чем плотность основной рабочей жидкости, так, что общая плот ность жфм 5 р р°-лр ; 1,4 - 1,6 г/см
Отверстие с диаметром d заполня| т жфм 6, выполненный на основе тяжелой жидкости-носителя, например поплавковой хлороорганической жидкости, так, что общая плотность жфм б 5 р°+лр(2,4-2,7) г/см.
У торцовых поверхностей поплав(Ка 3 соосно с отверстиями d и d расположены торцы цилиндрических постоянных магнитов 7 с осевой поляризацией, находящихся в немагнит- ных втулках 8 диаметрами d и d . Магнитопроводы 9 попарно замыкают магнитные цепи магнитов 7. Зазор т между торцовой поверхностью поплавка и торцом постоянного магнита 7 с втулкой 8 составляет приблизительно 20-30 мкм.
Диаметры торцов магнитных систем d и d равны диаметрам соответствующих отверстий d и d.
Для заполнения отверстий d и d жфм 5 и 6 в постоянных магнитах 7 и магнитопроводах 9 выполнены технологические каналы 10.
Выход датчика 11 угла через электронный усилитель 12 и эталонное сопротивление R соединен с датчиком 13 момента. Сильфон 14 компенсирует температурное изменение объема рабочей жидкости 2 с момента включения ПМКА до момента выхода его на рабочие температурные режимы с фиксированной температурой, обеспечивавмой системой термостатированйя на фиг. 1 и 2 условно не показаны. Предлагаемый ПМКА работает еледующим образом. При наличии .ускорения а по измерительной оси акселероме ра ц воз ;никают три инерционные силы: F инерционная сила, действукщая на по V - объ лавок 3, равная V а , где ем поплавка 3 {без жидких ферромагнетиков 5 и средняя плотнос поплавка, приложенная при геометрической и плотностной- симметрии поплавка (в том числе нри d 1 1 в точке, лежащей на оси подвеса поп ла;вка( точка ЦТ;„ ). Инерционная сила F приложена к жфм 5, заполняющему б сверстию с диаметром d, а через жфм 5 приложена также к поплавку 3, .Сила (где V - объем жфм 5) приложена в центре тяжести жфм 5 (лежащем на оси отверстия d ) т.е. на. плече 1 относительно подвеса поплавка . Инерционная сила приложена к жфм б, заполняющему отверстие с диа метром d. Также, как и ине щионная сила, приложенная к жфм 5, инерцион ная сила F через жфм 6 приложена к поплавку 3. Сила а (где v - объем жфм б) приложена в центре тяжести жфм б, т.е. на плече 1 относительнЬ оси подвеса поплавка. Кроме инерционных сил при наличии ускорения а,, на поплавок действует архимедова сила р° а,{где Vj - суммарный объем поплавка, вклю чая объемы жфм 5 и 6f р°- плотность основной рабочей жидкости). Архимедова сила в анализируемом случае симметрии поплавка 3 приложена в центре давления ЦД, лежащем на оси поплавка. I, . .Жидкостью-носителем жфм 5 являет ся бромбензол , плотность которого при 60°С. ( эта температура считается рабочей температурой прибора равна 1,4411 г/см , -при этом общая плотность жфм 5 (с учетом наличия ферромагнитных частиц в фер ромагнитной жидкости) например, рав на f 1,5 г/см. Основной рабочей жидкостью 2 является фторорганическая жидкость с плотностью р, равной при 60 С, например 2 г/см. Жидкостью-носителем жфм,6 являет ся хлороорганическая жидкость при этом общая плотность жфм 6, наприме равна f 2,5 г/см. Конструктивно допускаются и ДРУгие плотности f i р° и р, но при этом должно соблюдаться условие в рассматриваемом случае ЛР 0,5 г/см. Уравнение моментов относительно оси подвеса поплавка при ускореследующее:J . где Мдд - момент датчика 13 момента, или , Ч так как 1 , И йр и f f°+uf , следовательно ( Лр - f° -4р) . 0 так как , где Кгдд,, - коэффициент передачи датчика момента; Ijjf, - ток обратной связи контура разгрузки} окончательно получим . . 1 . T.e. подвижный узел предлагаемого ПЬОСА имеет маятниковость У2др 1 и при наличии ускорения а отклоняется из исходного полож&йия на угол, измеряемый датчиком 11 угла, выходной сигнал которого усиливается усилителем 12 и подается в датчик 13 момента, который развивает компенсирующий момент Ip. уравновешивакшдай момент сил, действующих на поплавок и обусловленных ускорением Эй . Как обычно, измеряя I (и,,( I(jj.. Hj), измеряем ускорение по измерительной оси акселерометра. Сумма сил по оси t при наличии ускорения а. равна Q.-(F%F;.F л z Р Чч-л V ч A-A,vV)«:. ( Учитывая, что Vg v +v -i-v, . , , , .4j П о р р , ПОи конструктивно выполняя v (.. vV) т.е. как и в традиционной конструкции ЙМКА реакции в опорах равны нулю. При наличии ускорения а с по оси маятника возникают следующие силы: инерционная сила Fe, приложенная к поплавку в точке ц1п . Инерционная сила Fg, действующая на жфм 5, а через него на поплавок, приложена в центре тяжести жфм 5, Аналогично иИерциойнаА. civflla Ft, действующая на жфм 6, и череэ него на поплавок приложена в центре тяжести жфм 6. Архимедова сила Qg, приложенная к поплавку в центре давления ( точка ЦД). По аналогии с силами, возникающими при ускорении а, силы, возни , равны кающие при ускорении а 5 гГ,гГл;т ,/ at FC , Ff . Bfc сЛ1лы не соэда41 42 f эти ют моментов относительно оси подвеса поплавка, так как линии их де ствия приходят через эту ось. Определяя сумму по оси f при на аналогично Ри личии ускорения получим Р Q -(Fj F ), a с учетом условий (1) , поэто му реакции в опорах отсутствуют. Наконец, npte наличии ускорения ас по оси подвеса f возникающие инерционные и архимедовы силы распределяются следующим образом. действуюИнерционная сила F V ар и щая на поплавок, равн , приложена к центру тяжести поплавка (без жфм 5 и 6 ), т.е., в точке ЦТ действующая Архимедова сила Q на поплавок, равна и приложена к центру давления поплавка (без жфм 5 и б ), т.е. с учетомоговоренной геометрической и плотностной симметрии поплавка, в точке, совпадающей с центром тяжести поплавка ЦТ . I Таким образом, инерционная сила FF и Архимедова Qg силы, действующие на поплавок, равны по величине (так как ,f ) и противоположны по направлению, а, кроме того, при ложены к поплавку в одной точке. Поэтому они не приводят к возникновению реакций в опорах поплавка как в направлении его оси подвеса, так и в .радиально направлении (поскольку силы Ff и не приводят к возникновению действующего на поплавок момента в плоскости, проходящей через ось подвеса поплавка). Кроме рассмотренных сил Ff и Qj, действующих на поплавок при наличии ускорения аг возникают, еще две силы. Инерционная сила F приложена к жфм 5, заполняющему отверстие с диаметром а, и действует через жфм 5 на правый торец верхней магнитной системы фиг. 1, ускорение а положительно).. Магнитный поток верхней магнитной системы замыкается по цепи: ле вый магнит 7 - жфм 5 - правый магнит 7 - магнитопровод 9. Магнитные силы притяжения, действующие на жидкий ферромагнетик 5, удерживают его от перетекания в полость поплавкового прибора через зазор сЛ, между торцом поплавка и торцом магнитной системы. Инерционная сила Fc- v p a|действует на жфм 6 и приложена через него к правому торцу нижней магнитной системы. Магнитный поток нижней магнитной системы заг/ыкается по цепи: левый магнит 7 - жфм 6 - правый магнит 7 магнитопровод 9. Магнитные силы притяжения удерживают жфм б от перетекаЛия в полость поплавкового прибора через зазор (fj- . Таким образом, предлагаемая конструкция поплавкового маятникового компенсационного акселерометра позволяет осуществить идеальное взвешивание поплавковой подвижной системы в рабочей поддерживающей жидкости, исключая при этом возникновение реакций в ее опорах при наличии ускорения в любом направлении. Это обуславливает исключение сухого Кулонова трения в опорах поплавка, т.е. повышает точность работы акселерометра.
фие.2
А -А
б-б
фивЛ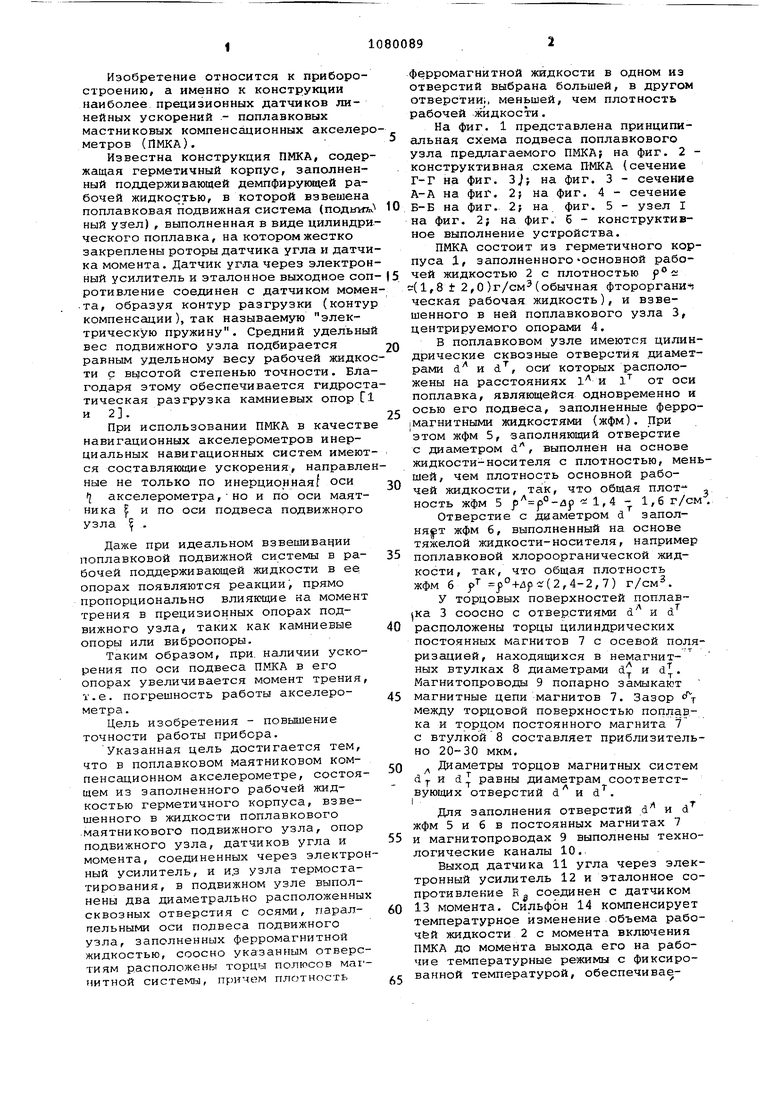
| название | год | авторы | номер документа |
|---|---|---|---|
| Поплавковый измерительный прибор | 1982 |
|
SU1061052A1 |
| Поплавковый маятниковый акселерометр | 1981 |
|
SU1040425A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2270417C1 |
| Измерительный преобразовательСКОРОСТи и уСКОРЕНия | 1979 |
|
SU794550A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| АКСЕЛЕРОМЕТР ГИДРОСТАТИЧЕСКИЙ | 2011 |
|
RU2488125C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
ПОПЛАВКОВЫЙ МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР, содержащий заполненный рабочей жидкостью герметичный корпус, взвешенный в жидкости поплавковый маятниковый подвижный узел, опоры подвижного узла, датчики узла и момента, соединен ные через электронный усилитель и узел термостатирования, о т л и ч а ющи и ся тем, что, с целью повышения точности работы путем уменьшения трения в опорах подвижного узла, в лодвижном узле выполнены два диаметрально расположенных сквозных отверстия, с осями, параллельными оси подвеса подвижного узла, заполненных, ферромагнитной жидкостью, а соосно указанным отверстиям расположены торцы полюсов магнитной системы, при этом плотность ферромагнитной жидкости в одном из отверстий выбрана большей, а в другом отверстии - меньшей, чем СП плотность рабочей жидкости. 00 ж QD
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Данилин В.П | |||
| гироскопические приборы | |||
| М., Высшая школа, 1965, с | |||
| Способ включения усилителя в трансляцию | 1923 |
|
SU403A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Никитин Б.А | |||
| и лр | |||
| Проектирование дифференцируквдих и интегрируюiQKX гироскопов и акселерометров | |||
| М., Машиностроение, 1969, с | |||
| Приспособление для воспроизведения изображения на светочувствительной фильме при посредстве промежуточного клише в способе фотоэлектрической передачи изображений на расстояние | 1920 |
|
SU172A1 |
