Изобретение относится к гироскопической технике и может найти применение в составе одноосных или двухосных гировертикалей, построенных на базе силовых и индикаторных гироскопических стабилизаторов и совершающих движение близкое к горизонтальному.
Известен маятниковый чувствительный элемент ДЖМ-9Б, который применяется в гировертикалях, например в МГВ-1С, МГВ-2, в качестве элемента коррекции. Конструкция его состоит из стеклянного герметичного цилиндра, частично заполненного токопроводящей жидкостью. В цилиндр вварены три контакта: один, центральный, находится всё время в жидкости, два других контакта частично покрыты жидкостью и при наклонах корпуса ДЖМ-9Б относительно плоскости местного горизонта изменяют свои переходные сопротивления, что и является выходным параметром этого датчика. ДЖМ-9Б включается в цепи продольной и поперечной коррекций гировертикалей.
Однако при действии линейных ускорений и, в частности, при центростремительном ускорении на виражах (разворотах) жидкость внутри ДЖМ-9Б отклоняется к ложной вертикали, что приводит к выдаче ложного сигнала и, следовательно, к значительным погрешностям в определении углов ориентации.
Известен также датчик акселерометра с поплавковым подвесом ДА-1, который состоит из поплавкового узла с нижней маятниковостью и с полуосями подвеса, установленными в корпусе. Внутри подвеса находится рамка со смещённым для создания нижней маятниковости центром масс, при этом к поплавковому узлу крепится ротор датчика угла и ротор датчика момента, статоры которых крепятся в корпусе, к которому жёстко прикреплён сильфон для компенсации изменения объёма жидкости, заполняющей внутреннюю полость между поплавковым узлом и корпусом. Для измерения ускорения (например, с целью измерения угла отклонения от вертикали) датчик угла подключается к датчику момента через усилитель.
Недостатком данного устройства является принципиальная невозможность устранять погрешности на вираже (при разворотах) при измерении угла отклонения от вертикали, так как при действии центростремительного ускорения на вираже возникает инерционный момент, который отклоняет поплавковый узел к ложной вертикали.
В качестве прототипа взято устройство (патент РФ на изобретение № 2719241 МПК G01C 7/04. Гироскопический маятник / С.В. Кривошеев, К.О. Лукин. – Заявл. 13.06.2019.– Опубл. 17.04.2020.– Бюл. №11).
Гироскопический маятник построен по поплавковой схеме и содержит поплавковый узел с нижней маятниковостью, установленный своими полуосями в корпусе гиромаятника и состоящий из рамки, помещённой в поплавковый узел, с которой жёстко связан ротор датчика угла, а статор – с корпусом гиромаятника, на котором жёстко закреплён сильфон, полость которого и полость между корпусом и поплавковым узлом заполнены жидкостью, в рамке поплавкового узла установлены два груза, симметрично расположенные относительно центра масс поплавкового узла, и гиродвигатель, который подключён к контуру управления скоростью вращения ротора гиродвигателя, состоящему из последовательно соединённых датчика линейной скорости подвижного объекта и масштабного усилителя и регулирующему угловую скорость ротора гиромотора в соответствии с формулой
где 



Однако недостатком данного устройства, взятого за прототип, является завышенная масса поплавкового узла за счет того, что нижняя маятниковость создается только грузами, помещенными в поплавковый узел, и не используется конструктивная возможность одновременного смещения центра масс гиродвигателя для формирования нижней маятниковости. Увеличение массы поплавкового узла приводит также к увеличению габаритов (диаметра и (или) длины поплавкового узла) для обеспечения разгрузки опор подвеса, что приводит к увеличению остаточного момента сил сухого трения в опорах подвеса и соответственно увеличению угла статической точности (угла застоя).
Техническим результатом изобретения является уменьшение массы поплавкового узла гироскопического маятника и повышение точности формирования сигнала отклонения от местной вертикали (горизонта) на виражах (при движении в кривых).
Технический результат достигается тем, что в гироскопическом маятнике, содержащем поплавковый узел с нижней маятниковостью, созданной двумя грузами, симметрично расположенными относительно центра масс поплавкового узла, установленный своими полуосями в корпусе гиромаятника и состоящий из рамки, помещённой в поплавковый узел, с которой жёстко связан ротор датчика угла, а статор – с корпусом гиромаятника, на котором жёстко закреплён сильфон, полость которого и полость между корпусом и поплавковым узлом заполнены жидкостью, при этом в рамке поплавкового узла кроме грузов установлен гиродвигатель, который подключён к контуру управления скоростью вращения ротором гиродвигателя, включающему последовательно соединённые датчик линейной скорости подвижного объекта и масштабный усилитель и регулирующему угловую скорость ротора гиродвигателя в соответствии с формулой
где 



где 



где 

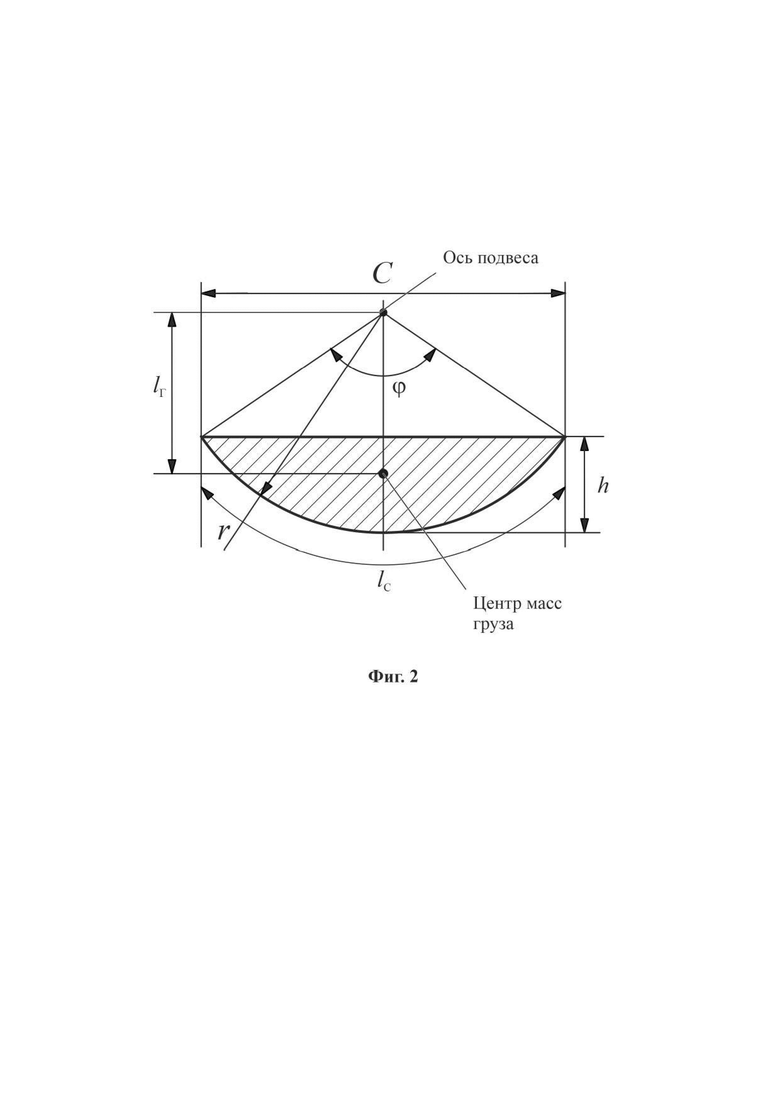
Сущность изобретения поясняется фиг.1 и фиг.2. На фиг.1 приведен продольный разрез эскиза гироскопического маятника с контуром управления угловой скоростью вращения гиродвигателя, а на фиг.2 – геометрические параметры груза, выполненного в виде сегмента. На фиг.1 и фиг.2 приняты следующие обозначения:
1 – корпус гиромаятника;
2 – поплавковый маятниковый узел гиромаятника;
3 – полуоси подвеса поплавкового узла;
4 – рамка поплавкового узла гиромаятника;
4.1 – фланец рамки поплавкового узла;
5 – ротор гиродвигателя гиромаятника;
6 – ротор датчика угла поворота поплавкового узла гиромаятника;
7 – статор датчика угла поворота поплавкового узла гиромаятника;
8 – грузики для создания нижней маятниковости;
9 – сильфон;
10 – жидкость;
11– контур управления скоростью вращения ротором гиродвигателя;
12 – датчик линейной скорости объекта;
13 – масштабный усилитель;



























В соответствии с фиг.1 гироскопический маятник состоит из герметичного корпуса 1, заполненного жидкостью 10, поплавкового маятникового узла 2, установленного полуосями подвеса 3 в корпусе прибора. Датчик угла 

ширина сегмента 
угол сегмента 
длина сегмента 
площадь сегмента координата центра масс

масс сегмента 
Расчет массы двух грузов:

При этом высота сегмента определяется в соответствии с фиг.1

Гиромаятник работает следующим образом. При движении по криволинейной траектории в плоскости горизонта в системе отсчёта, связанной с устройством, на гиромаятник действуют гироскопический момент, момент силы инерции и момент силы тяжести. Сумма всех моментов сил в проекции на ось 

где 




По основному уравнению динамики вращательного движения запишем дифференциальное уравнение вращения для поплавкового маятникового узла

где 



С учётом выражения для 

Чтобы угловая скорость виража 

которое можно назвать условием инвариантности гиромаятника к угловой скорости виража.
Так как кинетический момент ротора гиродвигателя гиромаятника определяется по формуле 
где 

Это условие подчёркивает тот факт, что угловой скоростью вращения ротора гиродвигателя гиромаятника необходимо управлять пропорционально скорости движения подвижного объекта, а реализуется это условие с помощью контура управления скоростью вращения ротора гиродвигателя 11, состоящего, например, из последовательно соединённых датчика линейной скорости объекта 12, масштабного усилителя 13.
Таким образом, независимо от виража поведение гиромаятника будет описываться уравнением

которое подчёркивает, что при движении по криволинейной траектории в плоскости горизонта виражные погрешности у гиромаятника отсутствуют.
Следовательно, и цепь коррекции гировертикали, в которой сигнал гиромаятника используется в качестве сигнала коррекции, тоже будет работать без виражных погрешностей.
Конструктивно возможны следующие варианты создания маятниковости 
1. Только за счет смещения двух грузов, выполненных в виде сегментов.
2. Только за счет смещения центра масс гиродвигателя.
3. Комплексное смещение центра масс за счет смещения гиродвигателя и двух грузов.
Недостатки.
1. Происходит увеличение массы подвижной системы.
2. Происходит увеличение диаметра поплавка.
3. Возможно рациональное конструктивное решение.
Для третьего варианта конструктивная особенность формирования маятниковости состоит в следующем:
- грузы 8 выполнены в виде цилиндрических сегментов и жестко крепятся к фланцам рамки 4;
- смещение 
Суммарная маятниковость будет определяться маятниковостью двух грузов и смещением гиродвигателя (см. фиг.1)


Воспользовавшись формулой (6) с учетом (1), (3), (5) и (7), определим маятниковость грузов

Подставив в (9) выражение (7) для высоты сегмента h, получим следующее выражение для маятниковости грузов

Подставив значение маятниковости грузов (10) в выражение (8) и проведя алгебраические преобразования, получим уравнение для определения величины смещения 

Пример реализации устройства
Исходные данные для расчета.






Решение уравнения (11) имеет один вещественный корень
При этом массы грузов равны при одинаковой форме в виде цилиндрического сегмента и одинаковом радиусе:
1). 

2). 
Структура создания маятниковости
1) 
2) 
Из анализа следует, что выигрыш в массе, обусловленный дополнительным смещением гиродвигателя, составляет 23,35г, что составляет 22,12%.
Зазор между ротором гиродвигателя и внутренней поверхностью поплавкового узла составил 
Применение предложенной конструкции поплавкового узла гиромаятника позволяет существенно снизить массу подвижной системы, а, следовательно, и уменьшить габариты, например, диаметр поплавкового узла, что важно при проектировании при подборе жидкости (т.к. её плотность ограничивается величиной 1,8-1,9 г/см3).
Областью применения корректирующего устройства в виде гиромаятника могут быть силовые гировертикали для подвижных объектов, совершающих движение, близкое к горизонтальному. Это, к примеру, корабли, подводные лодки, путеизмерители.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| УСТРОЙСТВО ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИИ ЛИДАРА В ПЛОСКОСТИ ГОРИЗОНТА | 2007 |
|
RU2329468C1 |
| Гировертикаль | 1989 |
|
SU1789858A1 |
| Гироскопическое устройство индикации истинной вертикали | 1977 |
|
SU671477A1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |

Изобретение относится к гироскопической технике. Сущность изобретения заключается в том, что гироскопический маятник дополнительно содержит грузы, выполненные в виде цилиндрических сегментов и прикрепленные к фланцам рамки, а центр масс гиродвигателя смещен в направлении силы тяжести, при этом суммарная маятниковость гиромаятника 

где 



где 


Гироскопический маятник, содержащий поплавковый узел с нижней маятниковостью, созданной двумя грузами, симметрично расположенными относительно центра масс поплавкового узла, установленного своими полуосями в корпусе гиромаятника и состоящего из рамки, помещённой в поплавковый узел, с которой жёстко связан ротор датчика угла, а статор – с корпусом гиромаятника, на котором жёстко закреплён сильфон, полость которого и полость между корпусом и поплавковым узлом заполнены жидкостью, при этом в рамке поплавкового узла кроме грузов установлен гиродвигатель, который подключён к контуру управления скоростью вращения ротором гиродвигателя, включающему последовательно соединённые датчик линейной скорости подвижного объекта и масштабный усилитель и регулирующему угловую скорость ротора гиродвигателя в соответствии с формулой
 ,
,
где  – линейная скорость объекта;
– линейная скорость объекта; 
 ,
, – угловая скорость вращения ротора гиродвигателя гиромаятника и его осевой момент инерции, отличающийся тем, что грузы выполнены в виде цилиндрических сегментов и прикреплены к фланцам рамки, а центр масс гиродвигателя смещен в направлении силы тяжести, при этом суммарная маятниковость гиромаятника
– угловая скорость вращения ротора гиродвигателя гиромаятника и его осевой момент инерции, отличающийся тем, что грузы выполнены в виде цилиндрических сегментов и прикреплены к фланцам рамки, а центр масс гиродвигателя смещен в направлении силы тяжести, при этом суммарная маятниковость гиромаятника  определяется в соответствии с формулой
определяется в соответствии с формулой
 ,
,
где  ,
,  – массы грузов и гиродвигателя;
– массы грузов и гиродвигателя;  – расстояние от центра масс грузов до оси подвеса поплавкового узла, а
– расстояние от центра масс грузов до оси подвеса поплавкового узла, а  – смещение центра масс гиродвигателя относительно оси подвеса, определяемое решением уравнения
– смещение центра масс гиродвигателя относительно оси подвеса, определяемое решением уравнения
 ,
,
где  – толщина и плотность материала груза;
– толщина и плотность материала груза;  – радиус фланца и высота перемычки рамки поплавкового узла.
– радиус фланца и высота перемычки рамки поплавкового узла.
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| CN 106370168 A, 01.02.2017. | |||

