Область техники
Изобретение относится к рабочему инструменту с ручным управлением согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
Из патента DE 10334906 А1 известен антивибрационный элемент в переносном рабочем инструменте с ручным управлением, включающий в себя винтовую пружину, которая имеет на своем крайнем участке зазор относительно направляющей винтовой пружины. Таким образом получается пружина с нелинейной характеристикой.
Известные антивибрационные элементы с винтовыми пружинами имеют одинаковую жесткость во всех направлениях, проходящих перпендикулярно к продольному направлению винтовой пружины. Чтобы получить разную степень амортизации в различных направлениях, необходимо соответствующим образом установить в различных направлениях несколько антивибрационных элементов. Для достижения различной степени амортизации в различных направлениях известны также антивибрационные элементы из резины, которые имеют различную жесткость в различных направлениях за счет различия своих геометрических характеристик.
Раскрытие изобретения
Задачей изобретения является создание рабочего инструмента соответствующего типа с ручным управлением, который обладает хорошими виброамортизирующими свойствами.
Эта задача решена рабочим инструментом с ручным управлением с признаками, указанными в пункте 1 формулы изобретения.
За счет того, что расстояние от винтовой пружины до направляющей в разных направлениях различно, достигается различное амортизирующее действие в разных направлениях. Характеристики пружины получаются различными в зависимости от того, в каком направлении действует нагрузка на антивибрационный элемент. В том случае, когда во втором радиальном направлении нет расстояния между винтовой пружиной и направляющей, эффективная длина пружины в данном направлении, в том числе и в состоянии без нагрузки, уменьшена. Вследствие этого проявляется большая жесткость антивибрационного элемента в данном направлении. Таким образом легко достигается амортизационная характеристика, подходящая для данного устройства. Для достижения необходимой степени амортизирующего действия не требуются дополнительные детали, таким образом, возможна настройка амортизирующего действия также в уже существующих устройствах путем замены по меньшей мере одной направляющей и/или винтовой пружины.
Направляющая предпочтительно имеет опорный участок, на котором винтовая пружина жестко прикреплена к направляющей. Предусмотрено, что направляющая имеет направляющий участок, на котором пружина имеет первое расстояние до направляющей, причем направляющий участок находится ближе к центру винтовой пружины, чем опорный участок. Вследствие этого деталь, которая содержит направляющую, служит как для фиксации винтовой пружины на смежных деталях, так и для настройки амортизирующей характеристики. Дополнительные детали для закрепления винтовой пружины не требуются.
Направляющая предпочтительно имеет в поперечном сечении форму, отличающуюся от правильной формы круга. В частности, направляющая имеет поперечное сечение овальной формы. Благодаря овальной форме поперечного сечения в двух перпендикулярных по отношению друг к другу направлениях достигается соответственно минимальное и максимальное амортизирующее действие. В промежуточных направлениях достигается изменение амортизирующего действия с переходом от максимальной степени амортизации к минимальной, в соответствии с поперечным сечением. Однако имеется также возможность предусматривать для направляющей по меньшей мере в одной области поперечное сечение в форме сплющенного круга или круга со срезанным сегментом. Такое поперечное сечение приводит к снижению жесткости антивибрационного элемента только в одном направлении - в том, котором сплющена или срезана соответствующая область. При нагрузке в противоположном направлении жесткость остается неизменно высокой. Путем применения нескольких срезов в одном поперечном сечении удается хорошо настраивать результирующее амортизирующее действие.
В качестве дополнения к поперечному сечению направляющей, отличающемуся от формы круга, или в качестве альтернативного варианта предусматривается, что сама пружина имеет поперечное сечение, отличающееся от круглой формы. При этом поперечные сечения направляющей и пружины различны, так что расстояния от направляющей до пружины оказываются различными в разных направлениях. Простое исполнение получается в том случае, когда сечение пружины выполняется в форме окружности, которая на направляющем участке сплющена по меньшей мере с одной продольной стороны. В том радиальном направлении, в котором находится уплощение и в котором таким образом сокращается расстояние между пружиной и направляющей, увеличивается жесткость антивибрационного элемента.
Направляющая предпочтительно имеет спиралевидный паз, который проходит по меньшей мере по части направляющей. Паз определяет прохождение винтовой пружины как в продольном направлении, вдоль центральной продольной оси антивибрационного элемента, так и в поперечном направлении. В частности, паз проходит по всей длине направляющей. Чтобы добиться прогрессивной характеристики в продольном направлении антивибрационного элемента, предусматривается, что на направляющем участке винтовая пружина имеет третье расстояние до паза в направлении центральной продольной оси антивибрационного элемента. Однако может также предусматриваться вариант, при котором пружина на направляющем участке не взаимодействует с направляющими элементами в направлении центральной продольной оси антивибрационного элемента. Таким образом, направляющий участок может иметь гладкую поверхность, которая проста в изготовлении. Паз в этой области не обязателен.
Рабочий инструмент предпочтительно представляет собой мотопилу, например, бензопилу, с одной пильной цепью, приводимой в движение с прохождением вокруг направляющей шины, при этом по меньшей мере один антивибрационный элемент направлен перпендикулярно к плоскости направляющей шины. Подразумевается, что мотопила имеет продольное направление, которое пролегает вдоль направляющей шины пилы, вертикальное направление, проходящее перпендикулярно к продольному направлению в плоскости направляющей шины, и поперечное направление, пролегающее перпендикулярно к плоскости направляющей шины. Опыт показал, что хорошие характеристики в демпфировании вибраций достигаются в том случае, когда первое расстояние пролегает в вертикальном направлении по отношению к мотопиле. В направлении высоты мотопилы соответственно предусмотрена низкая жесткость антивибрационного элемента. Второе расстояние предпочтительно проходит в продольном направлении мотопилы. Таким образом, в продольном направлении мотопилы жесткость антивибрационного элемента делается высокой. В результате достигаются благоприятные условия управления мотопилой. Но возможна также конструкция, предусматривающая, что винтовая пружина имеет нулевое расстояние до направляющей в продольном направлении мотопилы. Таким образом достигается высокая жесткость в продольном направлении мотопилы, при этом в данном направлении не достигается прогрессивная характеристика пружины.
Мотопила предпочтительно имеет трубу-рукоятку, которая проходит поверх корпуса мотора, причем первый антивибрационный элемент располагается между рукояткой и приводным двигателем. Для фиксации винтовой пружины антивибрационного элемента предусмотрено, что первая направляющая формируется на рукоятке, а вторая направляющая выполнена на отдельной детали. Таким образом, для первой направляющей не требуется дополнительной детали. Выполнение второй направляющей на отдельной детали облегчает сборку.
Вторая направляющая предпочтительно соединена с крепежным участком для фиксации на одном из ребер приводного двигателя. Для компенсации допусков предусматривается, что крепежный участок имеет не менее одного выступа, который в монтированном состоянии крепежного участка выступает в область ребра так, что выступ и/или ребро пластично деформируются при монтаже крепежного участка. Пластичная деформация выступа и/или ребра делает возможным хорошую компенсацию допусков, которые имеют место при изготовлении приводного мотора. Вследствие этого нет необходимости в дополнительной обработке ребра. Крепежный участок устанавливается прямо на ребро, изготовленное предпочтительно методом литья. Выступы компенсируют избыточный или недостаточный размер ребра и, в частности, при этом выступы деформируются. Но может также предусматриваться и вариант, в котором материал выступов тверже, чем материал ребра, так что пластичной деформации подвергается ребро. Возможен вариант, при котором предпочтительной оказывается пластичная деформация и ребра, и выступов. Благодаря пластичной деформации обеспечивается прочное прикрепление крепежного участка к ребру.
Крепежный участок предпочтительно имеет прилегающий участок, на противоположных сторонах которого размещены позиционирующие площадки, причем каждая позиционирующая площадка имеет не менее одного выступа, и при этом выступы расположены напротив друг друга. Благодаря расположению выступов напротив друг друга компенсируются достаточно существенные допуски. Для задания положения крепежного участка предусмотрено, что каждая позиционирующая площадка имеет не менее двух выступов.
Предпочтительно труба-рукоятка входит в состав корпус-рукоятки, которая включает в себя заднюю ручку, причем корпус-рукоятка соединена с приводным двигателем посредством по меньшей мере трех антивибрационных элементов. Чтобы достичь хорошей степени амортизации колебаний, предусмотрено, что центральная продольная ось антивибрационных элементов расположена примерно в поперечном направлении по отношению к мотопиле. При этом все три антивибрационных элемента предпочтительно имеют различные степени амортизирующего действия в различных направлениях.
Краткий перечень фигур чертежей
Примеры исполнения изобретения поясняются ниже на основании фигур чертежей. Они изображают:
фигура 1 - схематичный вид мотопилы сбоку,
фигура 2 - аксонометрическое изображение корпус-рукоятки мотопилы в соответствии с фиг.1 с расположенным на нем цилиндром приводного двигателя,
фигура 3 - антивибрационный элемент в соответствии с фиг.2 в разнесенном изображении,
фигура 4 - антивибрационный элемент в соответствии с фиг.3 в смонтированном состоянии, вид сверху,
фигура 5 - разрез антивибрационного элемента в соответствии с фиг.4,
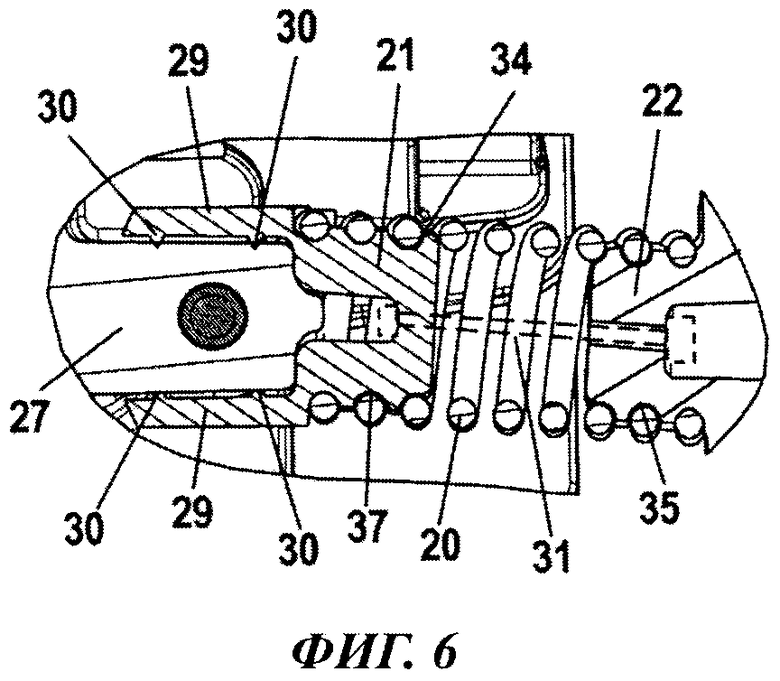
фигура 6 - изображение разреза в соответствии с фиг.5, представленное увеличенном виде,
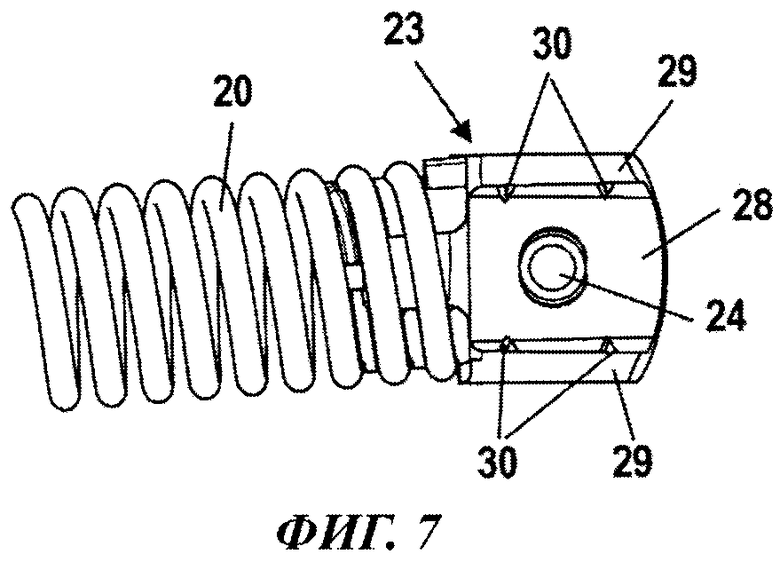
фигура 7 - вид снизу на антивибрационный элемент с расположенным на нем крепежным участком,
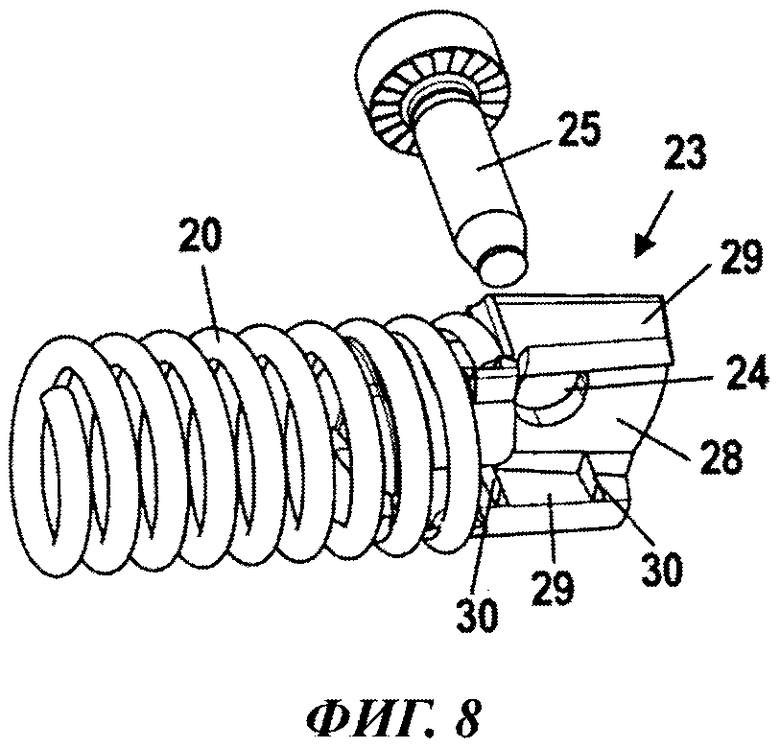
фигура 8 - аксонометрическое изображение антивибрационного элемента с расположенным на нем крепежным участком,
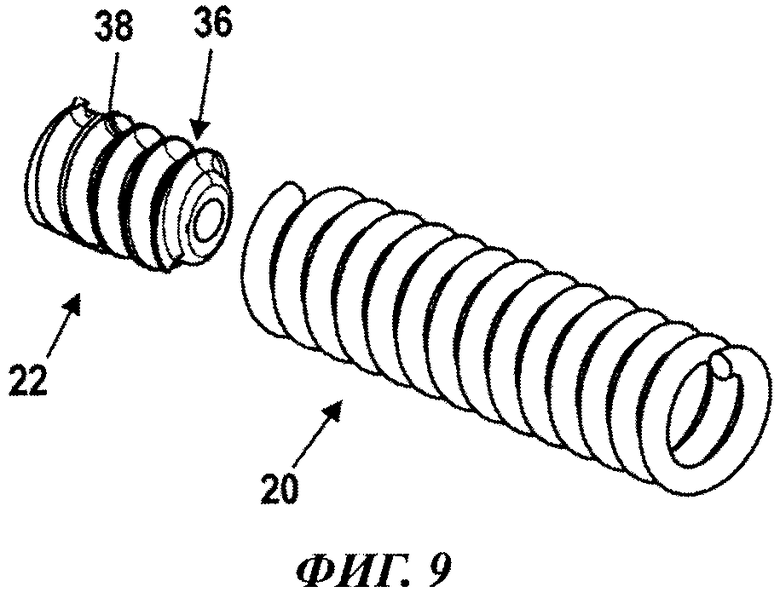
фигура 9 - разнесенное аксонометрическое изображение винтовой пружины антивибрационного элемента в соответствии с фиг.3-8 с направляющей, расположенной на трубе-рукоятке,
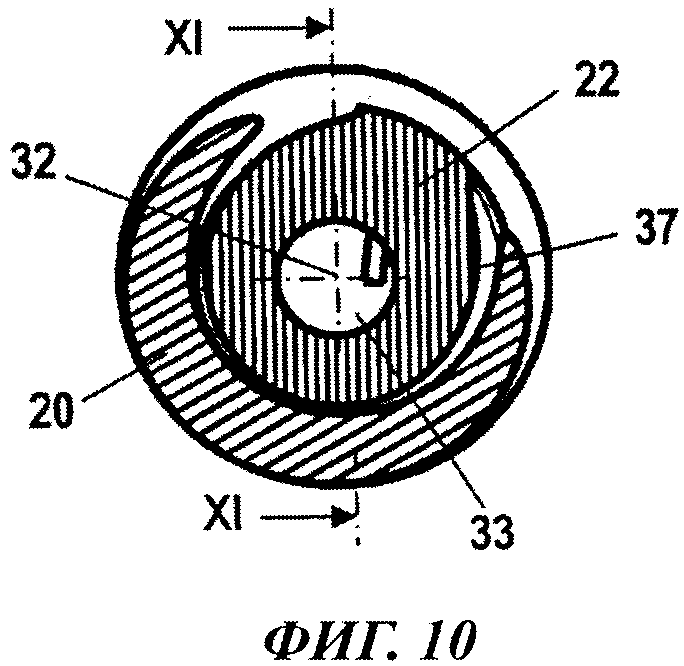
фигура 10 - разрез по линии Х-Х на фиг.11 антивибрационного элемента в соответствии с фиг.9 с монтированной направляющей,
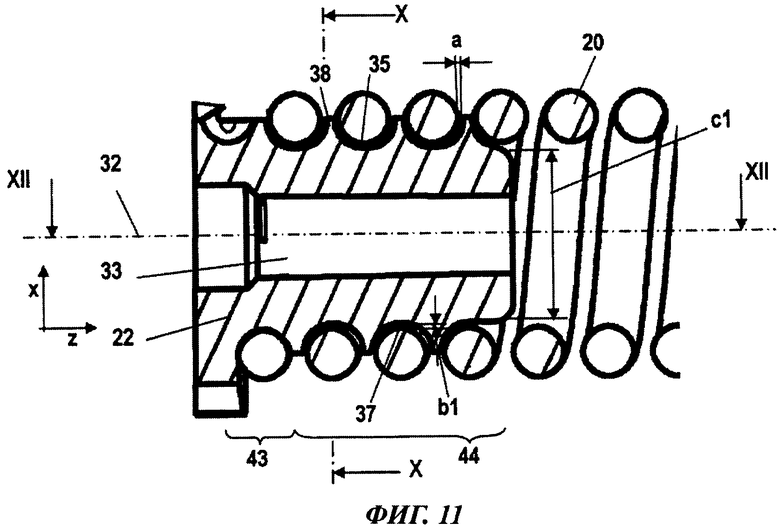
фигура 11 - разрез по линии XI-XI на фиг.10,
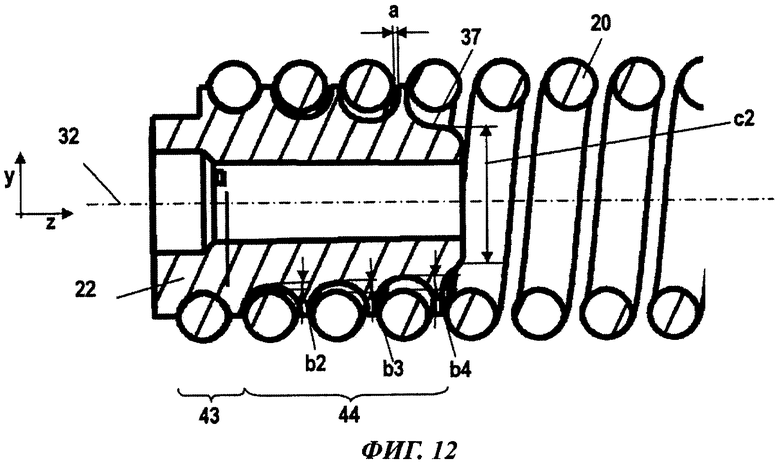
фигура 12 - разрез по линии XII-XII на фиг.11,
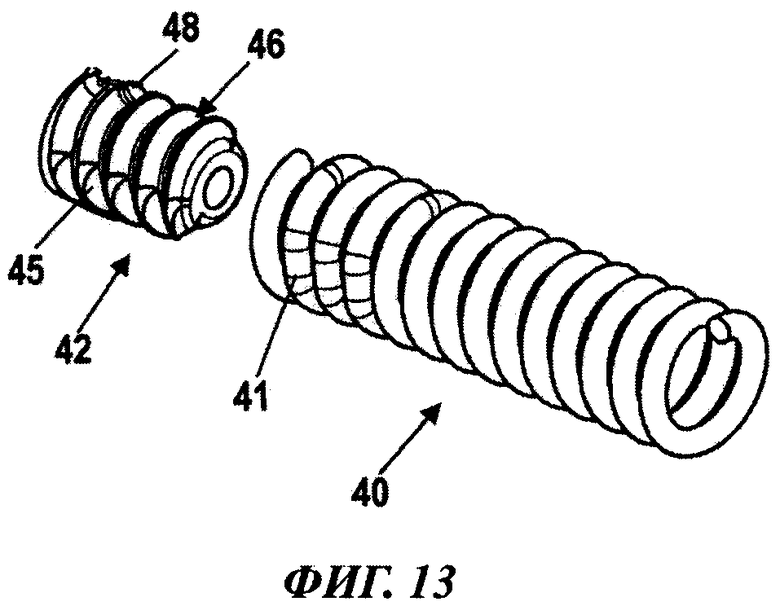
фигура 13 - разнесенное аксонометрическое изображение варианта исполнения винтовой пружины с направляющей,
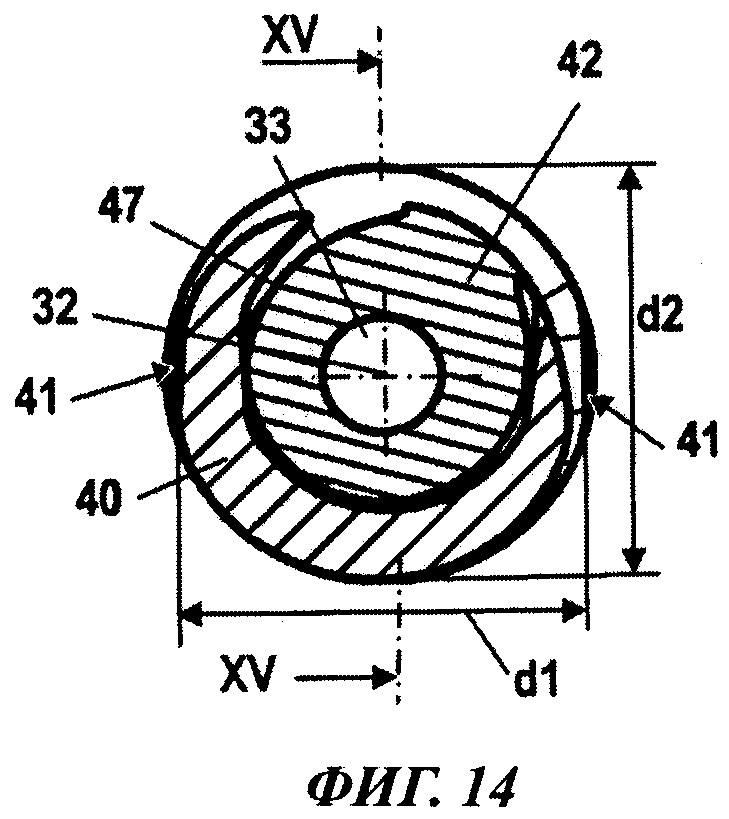
фигура 14 - разрез антивибрационного элемента по линии XIV-XIV на фиг.15,
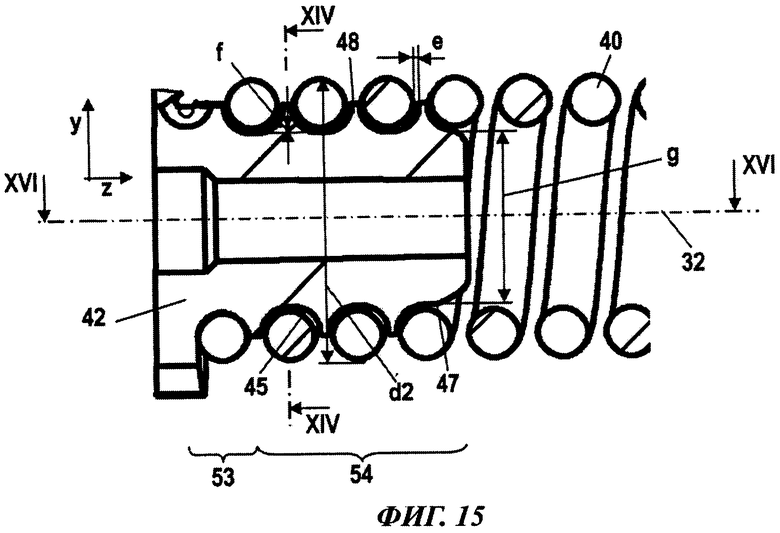
фигура 15 - разрез по линии XV-XV на фиг.14,
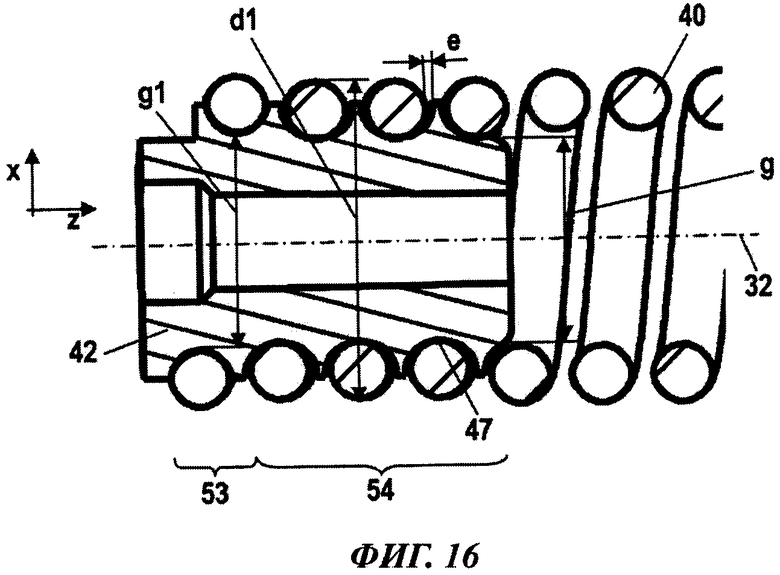
фигура 16 - разрез по линии XVI-XVI на фиг.15,
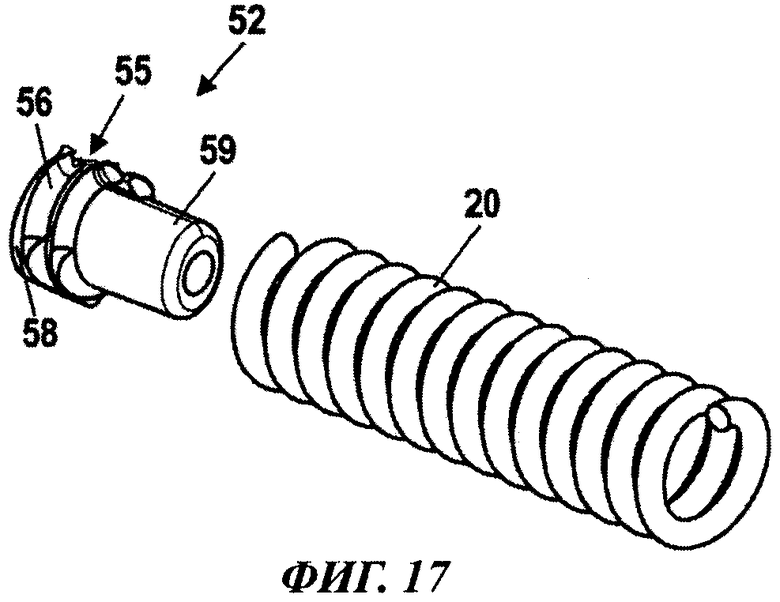
фигура 17 - разнесенное аксонометрическое изображение варианта исполнения направляющей с винтовой пружиной,
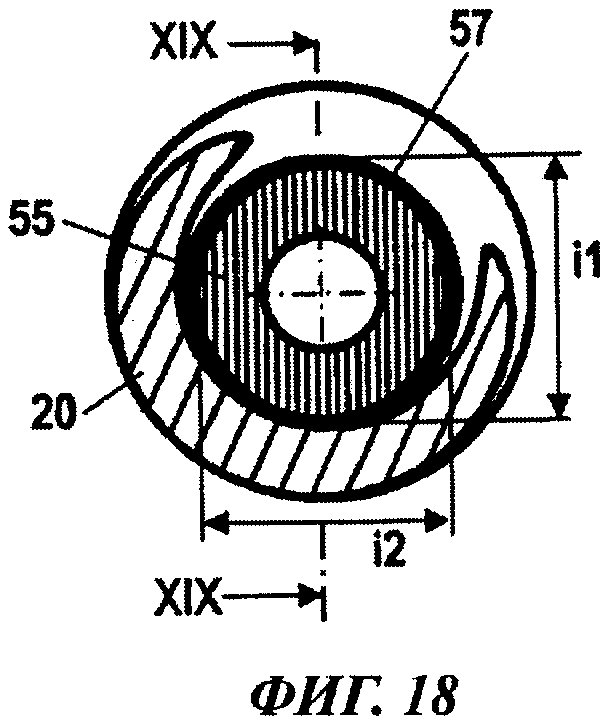
фигура 18 - разрез по линии XVIII-XVIII на фиг.19 антивибрационного элемента в соответствии с фиг.17,
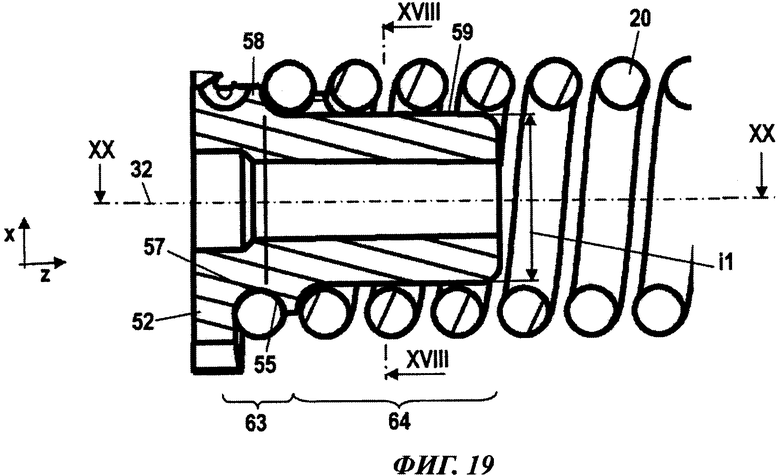
фигура 19 - разрез по линии XIX-XIX на фиг.18,
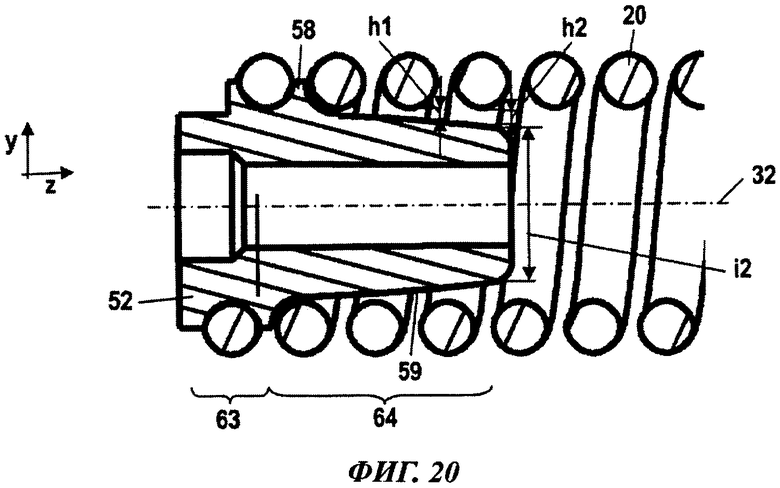
фигура 20 - разрез по линии ХХ-ХХ на фиг.19,
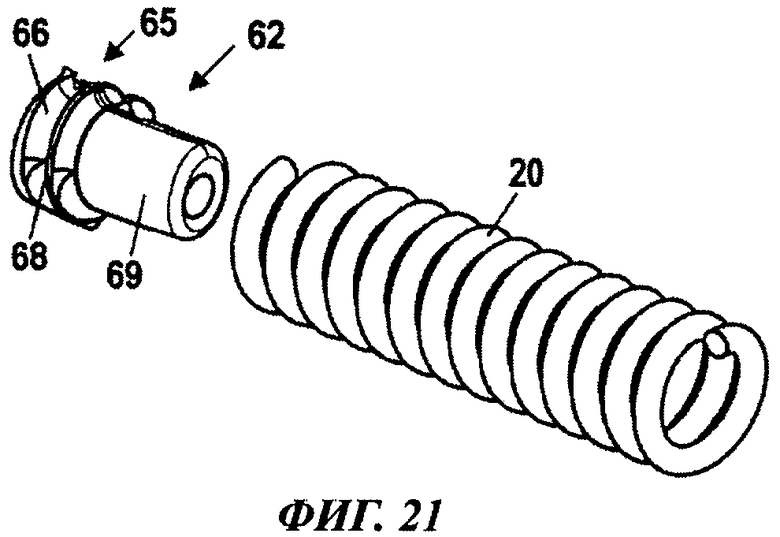
фигура 21 - разнесенное аксонометрическое изображение варианта исполнения направляющей с винтовой пружиной,
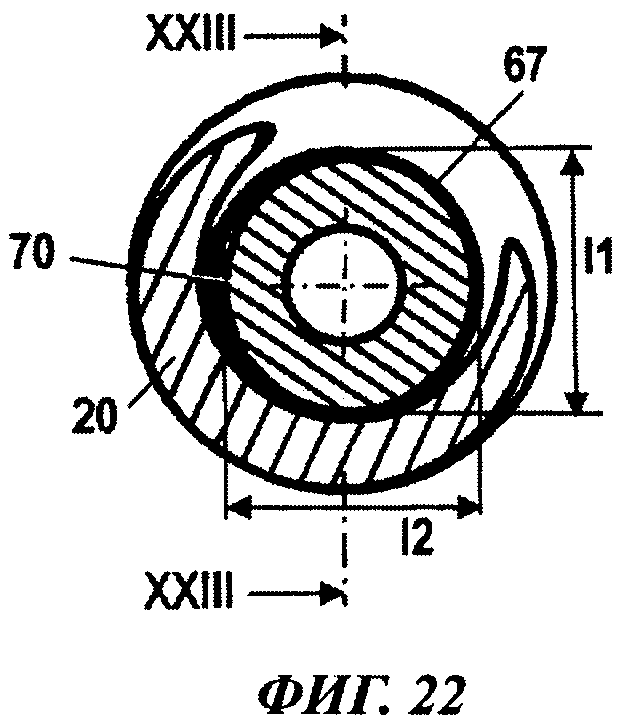
фигура 22 - разрез по линии XXII-XXII на фиг.23 антивибрационного элемента в соответствии с фиг.21,
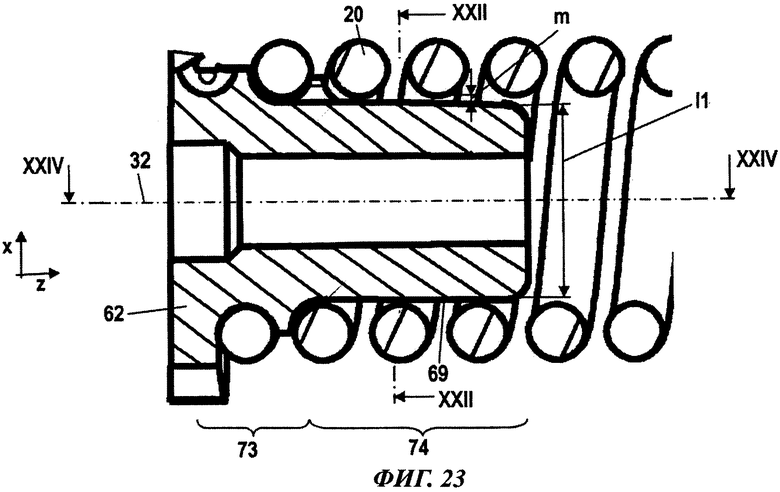
фигура 23 - разрез по линии XXIII-XXIII на фиг.22,
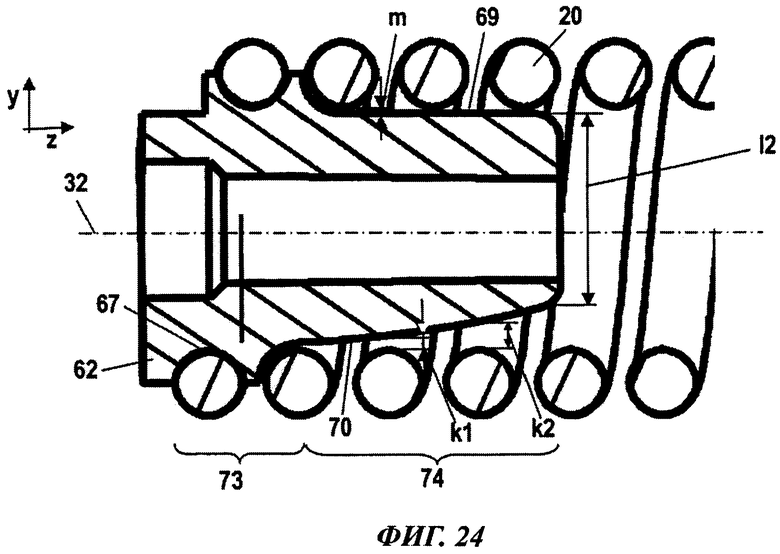
фигура 24 - разрез по линии XXIV-XXIV на фиг.23,
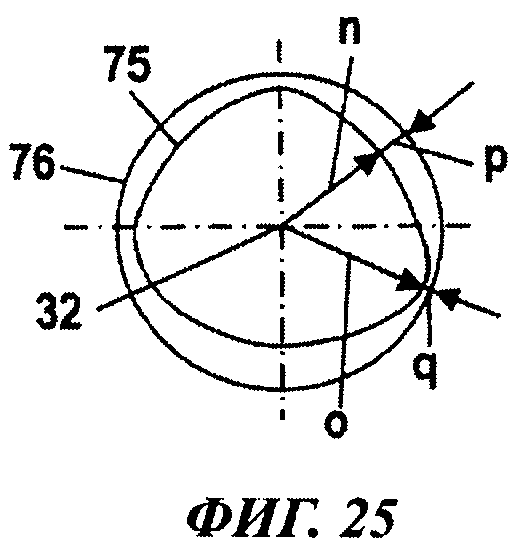
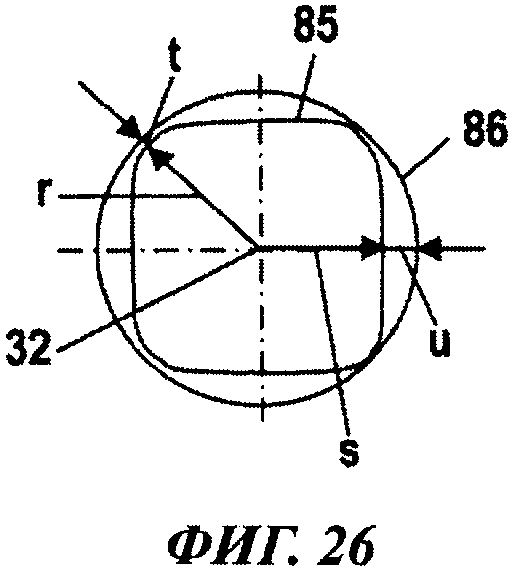
фигуры 25 и 26 - схематичные изображения в разрезе вариантов исполнения антивибрационных элементов.
Осуществление изобретения
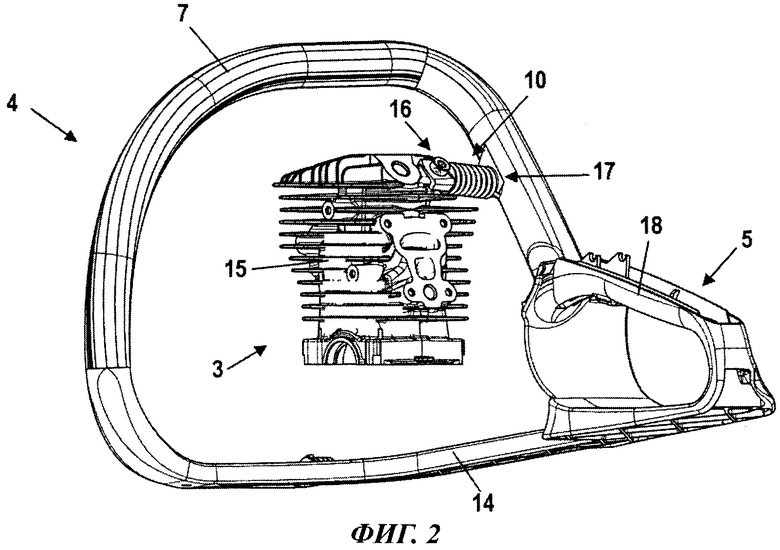
На фиг.1 в качестве варианта исполнения рабочего инструмента с ручным управлением схематично представлена мотопила 1. Однако рабочим инструментом с ручным управлением может также быть отрезально-шлифовальная машина, машина для стрижки газонов или подобное устройство. Мотопила 1 имеет корпус 2 мотора, в котором расположен приводной двигатель 3. Для наглядности корпус 2 мотора и приводной двигатель 3 изображены пунктиром на фиг.1. Мотопила 1 имеет конструктивный элемент 4, который включает в себя заднюю ручку 5 и захватную трубу 7. В области нижней части мотопилы 1 между передним концом захватной трубы 7 и задней ручкой 5 проходит перемычка 14, которая показана на фиг. 2. Далее этот конструктивный элемент 4 в соответствии со своей функцией будет называться корпус-рукоятка 4. Задняя ручка 5 имеет показанную на фиг. 2 крышку 18 ручки, которая формируется как единое целое с корпус-рукояткой 4. В нижней крышке 18 ручки расположены элементы управления, например, рычаг 6 управления газом, показанный на фиг.1. Нижняя крышка 18 ручки закрыта выполненной отдельно верхней крышкой 19 ручки, которая показана на фиг.1.
На корпусе 2 мотора расположена направляющая шина 8, которая выступает из него вперед на той стороне корпуса 2 мотора, которая противоположна задней ручке 5. Корпус 2 мотора на стороне, обращенной к направляющей шине 8, охвачен захватной трубой 7. На направляющей шине 8 расположена проходящая вокруг нее пильная цепь 9, которая приводится в движение от приводного двигателя 3.
Чтобы в процессе эксплуатации вибрации, которым подвергается корпус-рукоятка 4, сохранялись по возможности минимальными, она соединена с корпусом 2 мотора или приводным двигателем 3 при помощи трех антивибрационных элементов 10, 11, 12. Первый антивибрационный элемент 10 расположен между захватной трубой 7 и приводным двигателем 3. Антивибрационные элементы 11 и 12 расположены в области нижней части корпуса 2 мотора, при этом второй антивибрационный элемент 11 расположен на той стороне перемычки 14, которая обращена к направляющей шине 8, а третий антивибрационный элемент 12 - рядом с задней ручкой 5. Кроме того, между перемычкой 14 и корпусом 2 мотора расположен упорный выступ 13, который ограничивает относительное движение между корпусом 2 мотора и корпус-рукояткой 4 в поперечном направлении z, проходящем перпендикулярно плоскости направляющей шины 8.
Моторная пила 1 имеет продольное направление x, проходящее вдоль направляющей шины 8. Вертикальное направление y пролегает в плоскости направляющей шины 8 перпендикулярно к продольному направлению x. Каждый вибрационный элемент 10, 11, 12 имеет центральную продольную ось 32, которая установлена по существу в поперечном направлении z.
Как показано на фиг.2, приводной двигатель 3 выполнен в виде двигателя внутреннего сгорания и имеет цилиндр 15. На цилиндре 15 закреплен первый конец 16 первого антивибрационного элемента 10. Второй конец 17 антивибрационного элемента 10 расположен на захватной трубе 7. При этом антивибрационный элемент 10 закреплен на цилиндре 15 на высоте головки цилиндра.
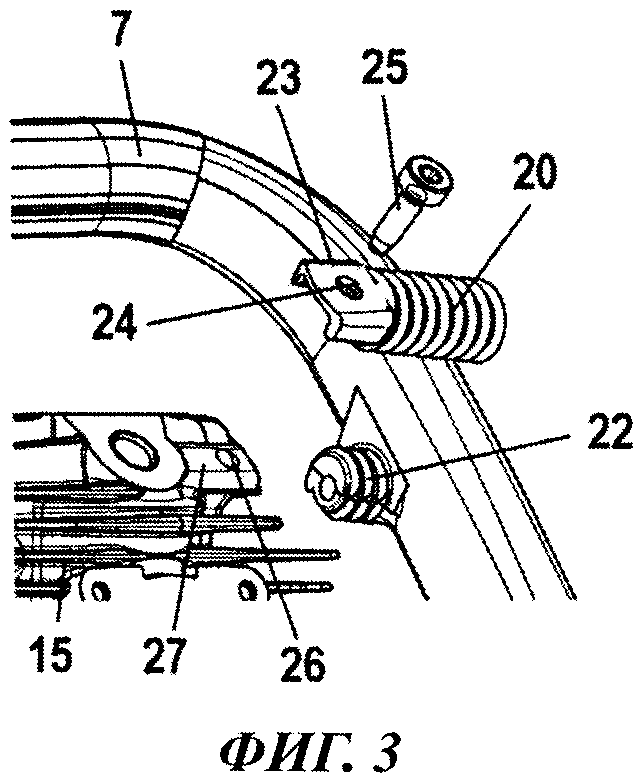
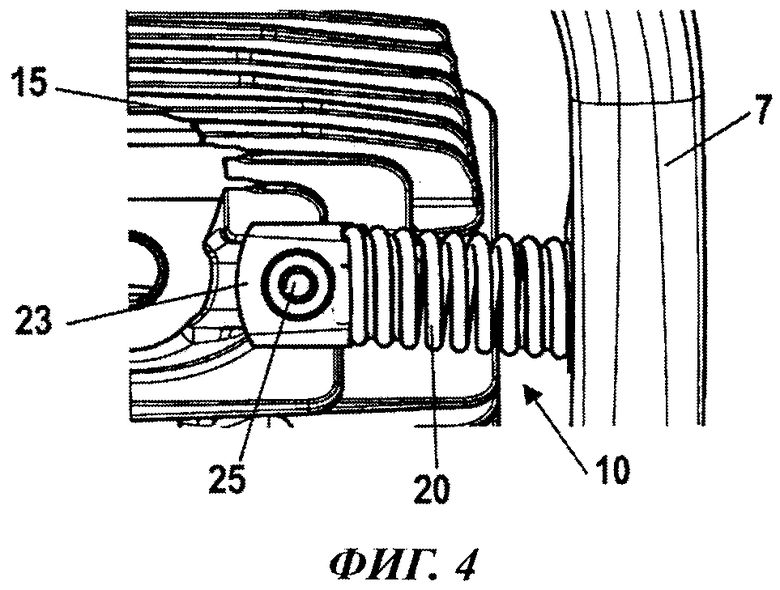
Как показано на фиг.3, антивибрационный элемент 10 включает в себя винтовую пружину 20. На изображении на фиг.3 в винтовую пружину 20 на первом конце 16 ввинчена не показанная первая бобышка или заглушка, которая выполнена как одно целое с крепежным участком 23. Крепежный участок 23 имеет отверстие 24 для крепежного винта 25. Цилиндр 15 имеет ребро 27, на котором имеется отверстие 26 для крепежного винта 25. Таким образом, на первом конце антивибрационный элемент 10 привинчивается к цилиндру 15. Для фиксации второго конца 17 на захватной трубе 7 формируется вторая бобышка или заглушка 22, на которую навинчивается винтовая пружина 20. На фиг.4 антивибрационный элемент 10 показан в смонтированном состоянии.
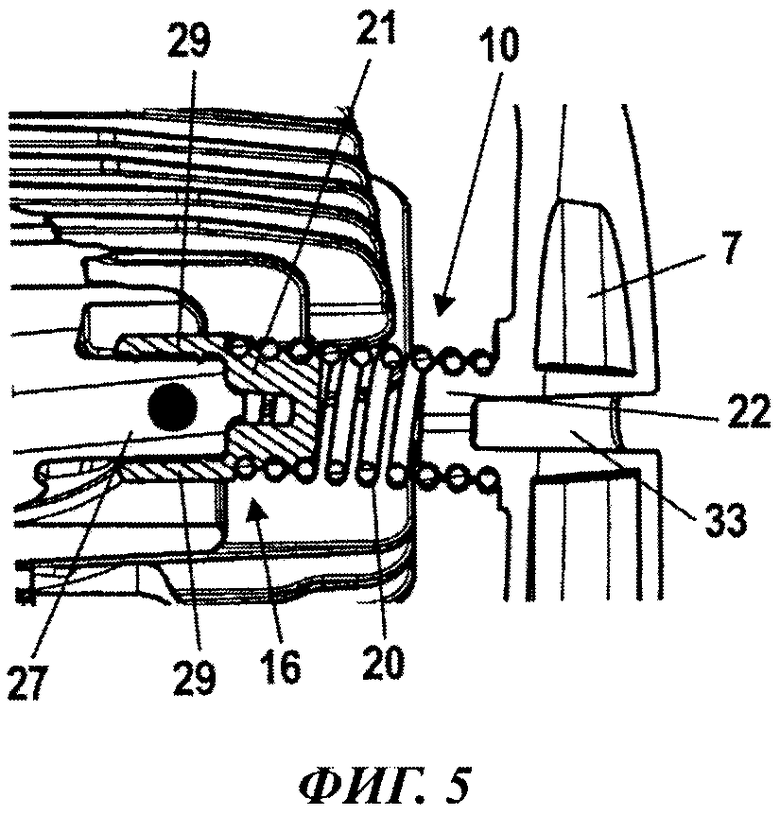
Фиг.5 и 6 демонстрируют разрез антивибрационного элемента 10. На первом конце 16 в винтовую пружину 20 ввинчена первая бобышка или заглушка 21. Первая заглушка 21 выполнена как единое целое с крепежным участком 23. Первая заглушка 21 имеет направляющую 34, которая выполнена в виде спиралевидного паза и на которую навинчена винтовая пружина 20. На второй заглушке 22 предусмотрена направляющая 35, которая также выполнена в виде спиралевидного паза. Между обеими заглушками 21 и 22 располагается устройство 31 предохранения от обрыва, показанное на фиг.6 пунктиром.
Как показано также на фиг.7 и 8, на крепежном участке 23 имеется прилегающий участок 28, в котором имеется отверстие 24. На прилегающем участке 28 находятся две позиционирующих площадки 29, которые расположены перпендикулярно к плоскости прилегающего участка 28 и образуют с прилегающим участком U-образную форму. На каждой позиционирующей площадке 29 сформированы два компенсирующих выступа 30, которые направлены друг к другу. Компенсирующие выступы 30 имеют треугольное сечение, при этом один из углов треугольника направлен к соответствующей позиционирующей площадке 29, расположенной напротив него.
Как показано на фиг.5 и 6, позиционирующие площадки 30 выступают в область ребра 27. При накладывании крепежного участка 23 на ребро 27 компенсирующие выступы 30 и/или ребро 27 пластично деформируются. Придание заостренной формы компенсирующим выступам 30 особенно способствует деформации ребра 27. Таким образом обеспечивается прочное закрепление крепежного участка 23 на ребре 27. Компенсируются допуски изготовления цилиндра 15.
Фиг. с 9 по 12 демонстрируют исполнение направляющей 35 на примере второй заглушки 22. Направляющая 34 в первой заглушке 21 предпочтительно изготовлена таким же образом. Как показано на фиг.9, вторая заглушка 22 имеет проходящий по ее окружности спиралевидный паз 36, который пролегает по всей длине второй заглушки 22. Отдельные витки паза 36, расположенные рядом друг с другом, отделены друг от друга проходящей по окружности перегородкой 38. Как показано на фиг.9 и 10, паз 36 выполнен с поперечным сечением не в форме круга, а в форме овала. По этой причине расстояние от дна 37 паза, показанного на фиг.10, до центральной продольной оси 32 винтовой пружины 20, которая соответствует центральной продольной оси антивибрационного элемента 10, изменяется на протяжении одного витка.
На фиг.11 представлен разрез антивибрационного элемента в поперечном направлении z и в продольном направлении x мотопилы 1, перпендикулярно по отношению к вертикальному направлению у. Как показано на фиг.11, направляющая 35 имеет крепежный участок 43 и прилегающий к нему направляющий участок 44. Крепежный участок 43 расположен на конце винтовой пружины 20, а направляющий участок 44 - на стороне крепежного участка 43, обращенной к середине витка. На крепежном участке 43 винтовая пружина 20 туго надета на направляющую 35. Таким образом, на крепежном участке 43 винтовая пружина 20 прочно закреплена на заглушке 22.
В плоскости сечения, показанной на фиг.11, на направляющем участке 44 винтовая пружина находится на расстоянии b1 от дна 37 паза. Расстояние b1 в данной плоскости сечения практически постоянно по всей длине направляющего участка 44. В направлении центральной продольной оси 32 винтовая пружина 20 находится на определенном расстоянии а (по линии, параллельной центральной продольной оси 32 антивибрационного элемента 10,) до перегородки 38, ограничивающей паз 36. Таким образом, винтовая пружина 20 имеет возможность перемещения относительно центральной продольной оси 32 на ограниченном промежутке, как в параллельном, так и в перпендикулярном центральной продольной оси 32 направлении. Когда винтовая пружина 20 преодолевает расстояние а или b1, винтовая пружина 20 прилегает к направляющей 35. За счет этого повышается жесткость винтовой пружины 20, поскольку только витки, расположенные вне направляющей 35 винтовой пружины 20, способствуют упругости. На дне 37 паза заглушка 22 в плоскости сечения, показанной на фиг.11, имеет диаметр c1. В заглушке 22 имеется отверстие 33, которое служит, например, для размещения в нем устройства 31 предохранения от обрыва, показанного на фиг.6.
На фиг. 12 представлен разрез антивибрационного элемента 10 плоскостью, перпендикулярной продольному направлению x. Как демонстрирует фиг. 12, дно 37 паза находится на определенном расстоянии b2 в радиальном направлении (к центральной продольной оси 32) от винтовой пружины 20 на первом витке ее направляющего участка 44, прилегающем к крепежному участку 43. В следующем витке расстояние в радиальном направлении увеличивается до величины ЬЗ, а в следующем витке - до величины b4. В результате расстояние b между дном 37 паза и винтовой пружиной 20 увеличивается по мере приближения к середине винтовой пружины 20. При этом все расстояния b2, b3, b4 в данном сечении больше, чем расстояние b1 в сечении, показанном на фиг.11. В осевом направлении также сохраняется расстояние а. Как видно на фиг.12, заглушка 22 в сечении, показанном на фиг.12, имеет на стороне, обращенной к центру винтовой пружины, диаметр c2, который значительно меньше, чем диаметр c1. Диаметр c2 может, например, составлять приблизительно от 60% до 90% диаметра c1.
Благодаря различным расстояниям от направляющей 35 до винтовой пружины 20 в обеих показанных на фиг. 11 и 12 плоскостях сечения антивибрационный элемент 10 имеет в вертикальном направлении y жесткость, отличную от жесткости в продольном направлении x мотопилы 1. Поскольку расстояние М находится в продольном направлении x, а расстояния b2, b3 и b4 в вертикальном направлении y, жесткость антивибрационного элемента в продольном направлении x больше, чем в вертикальном направлении у. Антивибрационные элементы 11 и 12 предпочтительно изготавливаются так, что их жесткость в вертикальном направлении у меньше, чем жесткость в продольном направлении х. При этом сечение винтовой пружины 20 имеет круглую форму и диаметр его постоянен.
В варианте исполнения, представленном на фиг. с 13 по 16, предусмотрена заглушка 42, на которую навинчивается винтовая пружина 40. Заглушка 42 имеет направляющую 45, которая выполнена на проходящем вокруг нее спиралевидном пазу 46. Паз 46 пролегает по всей длине заглушки 42. Соседние пазы 46 отделены друг от друга спиралевидной перегородкой 48, проходящей вокруг заглушки. Как показано на фиг.14, винтовая пружина 40 на всем протяжении ее длины имеет поперечное сечение, форма которого отклоняется от круглой формы. Винтовая пружина 40 имеет уплощения или срезы 41 на продольных сторонах, расположенных друг напротив друга, в области которых винтовая пружина 40 имеет диаметр d1. Диаметр d1 меньше, чем измеренный в перпендикулярном к нему направлении в области, которая не имеет уплощений или срезов, диаметр 62. Паз 46 имеет показанное на фиг.14 дно 47 паза, которое проходит вокруг центральной продольной оси 32 по спирали с постоянным радиусом. При этом дно 47 паза в любом поперечном сечении находится на одинаковом расстоянии до центральной продольной оси 32.
Как видно в разрезе на фиг. 15, в плоскости, перпендикулярной к продольному направлению x, винтовая пружина 40 расположена на расстоянии f от направляющей 45. Расстояние f имеет место на направляющем участке 54, который граничит с крепежным участком 53. В направляющей 45 крепежного участка 53 прочно закреплена винтовая пружина 40. Направляющая 45 имеет здесь больший диаметр, чем на направляющем участке 54. На направляющем участке 54 дно 47 паза имеет диаметр g, который является постоянным по всей длине направляющего участка 54. В осевом направлении винтовая пружина 40 находится на расстоянии е от перегородки 48. Поэтому винтовая пружина 40 на направляющем участке 54 имеет возможность незначительно перемещаться в плоскости сечения, показанной на фиг.15, как в направлении центральной продольной оси 32, так и в направлении, ей перпендикулярном.
В плоскости сечения, показанной на фиг.16, перпендикулярной по отношению к вертикальному направлению у, винтовая пружина 40 также пролегает на направляющем участке 54 на дне 47 паза. Из-за уплощения 41 винтовая пружина 40 в этой области имеет уменьшенный диаметр d1, который подобран таким образом, что между винтовой пружиной 40 и дном 47 паза имеется тесный контакт. В осевом же направлении здесь тоже имеет место незначительное расстояние е. По причине прилегания винтовой пружины 40 к дну 47 паза здесь не предполагается подвижность в продольном направлении x мотопилы 1. Антивибрационный элемент, выполненный в соответствии с фигурами с 13 по 16, имеет данном направлении повышенную жесткость.
Фиг. с 17 до 20 демонстрируют еще один вариант осуществления антивибрационного элемента 10, с другим исполнением направляющей и винтовой пружины. Винтовая пружина 20, которая показана на фиг.17, имеет постоянное поперечное сечение круглой формы. Предусмотрена заглушка 52, которая имеет первую направляющую 55 и вторую направляющую 59. Первая направляющая 55 расположена в пазу 56, который ограничен спиральной перегородкой 58. В области второй направляющей 59 не предусмотрено проходящей вокруг детали перегородки или проходящего вокруг детали паза. В продольном направлении винтовой пружины 20 заглушка 52 в области второй направляющей 59 выполнена гладкой.
Как показано на фиг. 18, в области второй направляющей 59 заглушка 52 имеет первый диаметр i1, который больше, чем расположенный перпендикулярно к нему второй диаметр i2. Как видно на фиг.19, в области первой направляющей 55 выполнен опорный участок 63, на котором винтовая пружина 20 прочно закреплена на направляющей 55. Вторая направляющая 59 образует направляющий участок 64. В показанной на фиг.19 плоскости сечения, перпендикулярной к вертикальному направлению у, винтовая пружина 20 прилегает ко второй направляющей 59. Диаметр i1 второй направляющей 59 в данной плоскости сечения постоянен. На опорном участке 63 винтовая пружина 20 прилегает ко дну 57 паза и прочно крепится на направляющей 55.
Как демонстрирует фиг.20, вторая направляющая 59 выполнена в направлении, перпендикулярном к продольному направлению x, с конусообразным сужением. На стороне, обращенной к середине винтовой пружины 20, направляющая 59 имеет диаметр i2, который может составлять, например, приблизительно от 60% до 90% диаметра i1. Поперечное сечение направляющей 59 выполнено в форме овала. Как видно на фиг.20, винтовая пружина 20 находится на радиальном расстоянии h1 от направляющей 59, которое при прохождении одного витка увеличивается до расстояния h2. По причине увеличения расстояния h достигается прогрессивная характеристика антивибрационного элемента при нагрузке в вертикальном направлении y. В продольном направлении x характеристика является линейной по причине прилегания винтовой пружины 20 к направляющей 59.
В варианте исполнения, показанном на фиг. с 21 по 24, предусмотрена заглушка 62, которая имеет первую направляющую 65 и вторую направляющую 69. Первая направляющая 65 выполнена в виде паза 66, который ограничивается проходящей по окружности спиралевидной перегородкой 68. В области второй направляющей 69 перегородка 68 не предусмотрена, так что в этой области винтовая пружина 20 проходит в направлении центральной продольной оси 32 без направляющей.
Как видно на фигурах, заглушка 62 имеет в области второй направляющей 69 первый диаметр I1 и измеренный в перпендикулярном к нему направлении диаметр I2, который меньше, чем диаметр I1. При этом поперечное сечение заглушки 62 выполнено асимметричным. Заглушка 62 имеет с одной стороны срез 70, который и обуславливает уменьшенный диаметр I2. На противоположной стороне заглушка 62 выполнена в форме круга.
Фиг.23 демонстрирует разрез антивибрационного элемента плоскостью, перпендикулярной вертикальному направлению y. На опорном участке 73 винтовая пружина 20 проходит в пазу 66 и прочно в нем закреплена. В направляющем участке 74, граничащем с опорным, винтовая пружина 20 имеет незначительное поперечное расстояние m до направляющего участка 69. На опорном участке 73 винтовая пружина 20 прилегает ко дну 67 паза.
Как показано на фиг.24 в разрезе, перпендикулярном по отношению к продольному направлению x, винтовая пружина 20 с одной стороны расположена на небольшом расстоянии m от направляющей 69. На противоположной стороне заглушка 62 имеет срез 70. Таким образом, на этой стороне достигается увеличенное расстояние k1 в радиальном направлении, которое возрастает до величины k2 по мере приближения к середине винтовой пружины 20. Благодаря этому винтовая пружина 20 имеет возможность движения вверх, по изображению на фиг.24, относительно заглушки 62, до тех пор, пока не преодолеет расстояния k1 и k2. Таким образом, в данном направлении достигается прогрессивная характеристика. В противоположном направлении, т.е. при движении винтовой пружины 20 вниз по изображению на фиг.24, возможно лишь очень незначительное относительное движение, до прилегания винтовой пружины 20 к направляющей 69 после преодоления расстояния m. В результате этого достигается различная степень жесткости пружины в различных направлениях.
На фиг.25 схематично показан вариант исполнения направляющей 75, которая прилегает ко внутренней окружной поверхности 76 не показанной винтовой пружины. Направляющая 75 имеет поперечное сечение, отклоняющееся по форме от круга, в то время как внутренняя поверхность 76 пружины имеет круглую форму. Поперечное сечение направляющей 75 похоже на треугольник с закругленными углами. В трех областях, отстоящих друг от друга примерно на 120° каждая, направляющая 75 имеет радиус n. В такой области пружина отходит на расстояние p от направляющей 75.
В каждой из промежуточных областей направляющая 75 имеет второй, больший радиус о. В области второго радиуса о направляющая 75 имеет очень малое радиальное расстояние q до внутренней поверхности 76 пружины. Таким образом, винтовая пружина 76 имеет возможность проходить сравнительно большое расстояние в направлениях, в которых имеет место расстояние р, при этом достигается низкая жесткость. В направлениях, в которых действует расстояние q, возможно только незначительное относительное движение, так что здесь достигается большая жесткость.
В варианте исполнения, представленном на фиг.26, предусмотрена направляющая 85, которая по форме сечения соответствует квадрату с закругленными углами и расположена внутри не показанной винтовой пружины, внутренняя поверхность 86 которой имеет круглую форму. В области скругленных углов направляющая 85 имеет радиус r, который ненамного меньше, чем внутренний радиус пружины. Между направляющей 85 и внутренней поверхностью 86 пружины имеется очень незначительное первое расстояние t. В каждой из областей, находящейся между скругленными углами, направляющая 85 имеет радиус s, который меньше, чем радиус r. В таких областях между направляющей 85 и внутренней поверхностью 86 пружины имеется второе расстояние и, которое существенно больше, чем первое расстояние t. В результате этого в данных направлениях существует возможность более широкого относительного движения винтовой пружины относительно направляющей 85. Благодаря такому исполнению также удается получить различные степени жесткости в различных направлениях.
Предусматривается также вариант, при котором и винтовая пружина, и направляющая имеют поперечные сечения, отклоняющиеся от правильной круглой формы. Предпочтительными могут также быть другие или асимметричные поперечные сечения. Все три антивибрационных элемента 10, 11 и 12 предпочтительно выполнены с различными значениями жесткости в разных направлениях и сами направлены таким образом, что достигается высокая жесткость в продольном направлении x и незначительная жесткость в вертикальном направлении y.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧИЙ ИНСТРУМЕНТ, НАПРАВЛЯЕМЫЙ ВРУЧНУЮ | 2014 |
|
RU2675132C2 |
| РАБОЧИЙ ИНСТРУМЕНТ, НАПРАВЛЯЕМЫЙ ВРУЧНУЮ | 2014 |
|
RU2669958C2 |
| УПРАВЛЯЕМЫЙ ВРУЧНУЮ РАБОЧИЙ ИНСТРУМЕНТ | 2015 |
|
RU2672329C2 |
| МОТОПИЛА | 2008 |
|
RU2479420C2 |
| РАБОЧИЙ ИНСТРУМЕНТ С ТОРМОЗНЫМ МЕХАНИЗМОМ | 2013 |
|
RU2640362C2 |
| РАБОЧИЙ ИНСТРУМЕНТ, НАПРАВЛЯЕМЫЙ ВРУЧНУЮ, И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2009 |
|
RU2509645C2 |
| РУЧНОЙ РАБОЧИЙ ИНСТРУМЕНТ | 2016 |
|
RU2698611C2 |
| ФИКСИРУЮЩИЙ БЛОК ЗАКРЕПЛЕНИЯ ЭПЮРЫ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ДЛЯ ВЫСОКОСКОРОСТНЫХ МАГИСТРАЛЕЙ, ДЛИННОСОСТАВНОГО И ТЯЖЕЛОВЕСНОГО ДВИЖЕНИЯ ПОЕЗДОВ (ВАРИАНТЫ) | 2020 |
|
RU2751167C1 |
| ПЛАСТМАССОВОЕ ИЗДЕЛИЕ И ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ПЛАСТМАССОВОГО ИЗДЕЛИЯ | 2012 |
|
RU2585282C2 |
| ЛЕСОПИЛЬНАЯ УСТАНОВКА | 1996 |
|
RU2103160C1 |
Изобретение относится к рабочему инструменту с ручным управлением. Рабочий инструмент содержит по меньшей мере одну ручку для управления рабочим инструментом в процессе эксплуатации. Ручка соединена с приводным двигателем через по меньшей мере один антивибрационный элемент. Антивибрационный элемент включает винтовую пружину, которая по меньшей мере одним концом расположена на направляющей. Винтовая пружина находится от направляющей в первом радиальном направлении на первом расстоянии. Первое расстояние измеряется в первой плоскости, проходящей перпендикулярно продольному направлению рабочего инструмента. Во втором радиальном направлении винтовая пружина находится от направляющей на втором расстоянии, меньшем, чем в первом направлении, или это расстояние равно нулю. Второе расстояние измеряется во второй плоскости, проходящей в поперечном направлении (z) и в продольном направлении (x) и перпендикулярно по отношению к вертикальному направлению (y). Винтовая пружина имеет центральную продольную ось, направленную по существу в поперечном направлении. Направляющая и/или винтовая пружина имеет поперечное сечение, отличное от формы круга. Направляющая по меньшей мере на одном участке имеет сечение в форме сплющенного круга и/или винтовая пружина по меньшей мере на одном участке сплющена по меньшей мере с одной продольной стороны. В результате обеспечивается улучшение виброамортизирующих свойств. 20 з.п. ф-лы, 26 ил.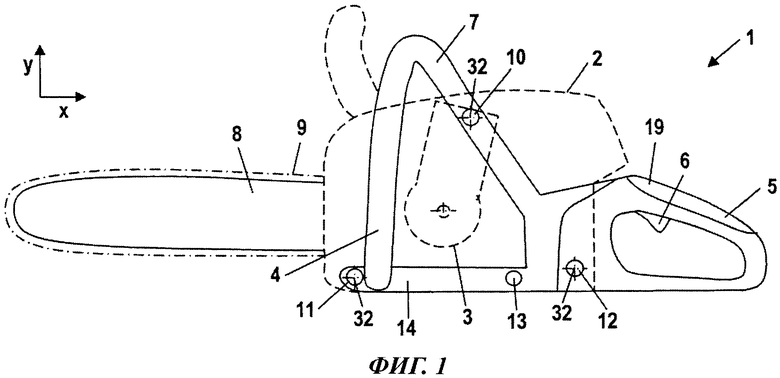
1. Рабочий инструмент с ручным управлением с приводным двигателем (3) для приведения в движение рабочего органа инструмента, с по меньшей мере одной ручкой (5) для управления рабочим инструментом в процессе эксплуатации, причем ручка (5) соединена с приводным двигателем (3) через по меньшей мере один антивибрационный элемент (10, 11, 12), причем антивибрационный элемент (10, 11, 12) включает винтовую пружину (20, 40), которая по меньшей мере одним концом расположена на направляющей (34, 35, 45, 59, 69, 75, 85), причем винтовая пружина (20, 40) находится от направляющей (34, 35, 45, 59, 69, 75, 85) в первом радиальном направлении на первом расстоянии (b2, b3, b4, f, h1, h2, k1, k2, p, u), причем первое расстояние измеряется в первой плоскости, проходящей перпендикулярно продольному направлению (x) рабочего инструмента, отличающийся тем, что во втором радиальном направлении винтовая пружина (20, 40) находится от направляющей (35, 45, 59, 69, 75, 85) на втором расстоянии (b1, m), меньшем, чем в первом направлении, или это расстояние равно нулю, причем второе расстояние измеряется во второй плоскости, проходящей в поперечном направлении (z) и в продольном направлении (x) и перпендикулярно по отношению к вертикальному направлению (y), причем винтовая пружина (20, 40) имеет центральную продольную ось (32), направленную по существу в поперечном направлении (z), причем направляющая (35, 59, 69, 75, 85) и/или винтовая пружина (20, 40) имеет поперечное сечение, отличное от формы круга, причем направляющая (65) по меньшей мере на одном участке имеет сечение в форме сплющенного круга и/или винтовая пружина (40) по меньшей мере на одном участке сплющена по меньшей мере с одной продольной стороны.
2. Рабочий инструмент по п.1, отличающийся тем, что направляющая (35, 45, 55, 65) имеет опорный участок (43, 53, 63, 73), на котором винтовая пружина (20, 40) жестко прикреплена к направляющей (35, 45, 55, 65), и направляющий участок (44, 54, 64, 74), на котором винтовая пружина (20, 40) находится на определенном расстоянии (b2, b3, b4, f, h1, h2, k1, k2) от направляющей (35, 45, 55, 65), причем направляющий участок (44, 54, 64, 74) расположен на меньшем расстоянии от середины винтовой пружины (20, 40), чем опорный участок (43, 53, 63, 73).
3. Рабочий инструмент по п.1 или 2, отличающийся тем, что направляющая (35, 59, 69, 75, 85) имеет сечение, форма которого отличается от формы круга, причем внутренняя поверхность винтовой пружины (20) имеет круглую форму.
4. Рабочий инструмент по п.3, отличающийся тем, что направляющая (35, 59) имеет сечение овальной формы.
5. Рабочий инструмент по п.2, отличающийся тем, что винтовая пружина (40) на направляющем участке (54) выполнена в форме окружности, сплющенной по меньшей мере с одной продольной стороны.
6. Рабочий инструмент по любому из пп.1, 2, 4 и 5, отличающийся тем, что направляющая (35, 45, 55, 59, 65, 69, 75, 85) выполнена на заглушке (21, 22, 42, 53, 62), вдающейся внутрь винтовой пружины (20, 40).
7. Рабочий инструмент по любому из пп.2, 4 и 5, отличающийся тем, что направляющая (35, 45, 55, 65) включает паз (36, 46, 56, 66) спиральной формы, который проходит по меньшей мере на одном участке направляющей (35, 45, 55, 65).
8. Рабочий инструмент по п.7, отличающийся тем, что паз (36) выполнен с поперечным сечением в форме овала.
9. Рабочий инструмент по п.7, отличающийся тем, что паз (36, 46) проходит по всей длине направляющей (35, 45).
10. Рабочий инструмент по п.7, отличающийся тем, что винтовая пружина (20, 40) на направляющем участке (44, 54) расположена на третьем расстоянии (а, е) от паза (36, 46) в направлении центральной продольной оси (32) антивибрационного элемента (10).
11. Рабочий инструмент по п.7, отличающийся тем, что винтовая пружина (20) на направляющем участке (64, 74) проходит в направлении центральной продольной оси (32) антивибрационного элемента (10), без взаимодействия с направляющими элементами.
12. Рабочий инструмент по любому из пп.1, 2, 4, 5, 8-11, отличающийся тем, что рабочий инструмент представляет собой мотопилу (1) с пильной цепью (9), приводимой в движение вокруг направляющей шины (8), и по меньшей мере один антивибрационный элемент (10, 11, 12) направлен перпендикулярно к плоскости направляющей шины (8).
13. Рабочий инструмент по п.12, отличающийся тем, что мотопила (1) имеет продольное направление (x), проходящее вдоль направляющей шины (8), вертикальное направление (y), проходящее в плоскости направляющей шины (8) перпендикулярно к продольному направлению (х), и поперечное направление (z), перпендикулярное к плоскости направляющей шины (8), причем первое расстояние (b2, b3, b4, f, h1, h2, k1, k2) является расстоянием в направлении (у) высоты мотопилы (1).
14. Рабочий инструмент по п.13, отличающийся тем, что второе расстояние (b1, m) является расстоянием в направлении (x) длины мотопилы (1).
15. Рабочий инструмент по п.14, отличающийся тем, что в направлении (x) длины мотопилы (1) винтовая пружина (20, 40) отстоит на нулевом расстоянии от направляющей (45, 59).
16. Рабочий инструмент по любому из пп.1, 2, 4, 5, 8-11, 13-15, отличающийся тем, что рабочий инструмент имеет трубу-рукоятку (7), охватывающую корпус мотора рабочего инструмента, причем первый антивибрационный элемент (10) расположен между трубой-рукояткой (7) и приводным двигателем (3).
17. Рабочий инструмент по п.16, отличающийся тем, что первая направляющая (35) сформирована на трубе-рукоятке (7), а вторая направляющая (34) выполнена на отдельном конструкционном элементе.
18. Рабочий инструмент по любому из пп.1, 2, 4, 5, 8-11, 13-15, отличающийся тем, что направляющая (34) связана с крепежным участком (23), служащим для фиксации относительно ребра (27) приводного двигателя (3), причем крепежный участок (23) имеет по меньшей мере один выступ, который при смонтированном положении крепежного участка (23) выступает в область ребра (27), таким образом, что выступ и/или ребро (27) при монтаже крепежного участка (23) пластично деформируется.
19. Рабочий инструмент по п.18, отличающийся тем, что на крепежном участке (23) имеется прилегающий участок (28), на противоположных сторонах которого расположены позиционирующие площадки (29), причем на каждой площадке (29) сформирован по меньшей мере один выступ, причем выступы расположены напротив друг друга.
20. Рабочий инструмент по п.19, отличающийся тем, что каждая из позиционирующих площадок (29) имеет по меньшей мере два выступа.
21. Рабочий инструмент по любому из пп.17, 19, 20, отличающийся тем, что труба-рукоятка (7) входит в состав корпус-рукоятки (4), которая включает заднюю ручку (5), причем корпус-рукоятка (4) соединена с приводным двигателем (3) посредством по меньшей мере трех антивибрационных элементов (10, 11, 12), причем центральная продольная ось (32) антивибрационных элементов (10, 11, 12) расположена примерно в поперечном направлении (z) рабочего инструмента.
| DE 10334906 A1, 26.02.2004 | |||
| Способ включения пяти-электродной лампы с тремя сетками | 1934 |
|
SU48855A1 |
| Ручная виброзащищенная машина вращательного действия | 1979 |
|
SU870084A1 |
| Ручная моторная пила | 1977 |
|
SU650805A1 |
| DE 4320859 A1, 20.01.1994. | |||

