Изобретение относится к области авиационного двигателестроения и может быть использовано в электронных системах (САУ) автоматического управления турбовинтовыми силовыми установками (ТВ СУ).
Известен способ управления ГТД, реализованный в электронно-гидромеханической САУ супервизорного типа [1]. Способ заключается в том, что, с целью повышения точности управления, управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, реализованный, например, в электронно-гидромеханической САУ двигателя ТВ7-117, входящего в силовую установку (СУ) самолета Ил-114 [2].
СУ содержит два турбовинтовых двигателя (ТВД) ТВ7-117С и два воздушных винта (ВВ) СВ-34.
Способ заключается в том, что измеряют положение рычага (РУД) управления двигателем, частоту вращения турбокомпрессора, давление и температуру воздуха на входе в двигатель, температуру газов за турбиной газогенератора, формируют заданное значение частоты вращения турбокомпрессора как функцию от положения РУД, давления и температуры воздуха на входе в двигатель, задают предельное для данного двигателя значение температуры газов за турбиной газогенератора, сравнивают заданное значение частоты вращения турбокомпрессора и измеренное, сравнивают предельное для данного двигателя значение температуры газов за турбиной газогенератора (являющееся константой для всех двигателей данного типа с возможностью регулировки в ограниченном диапазоне при приемосдаточных испытаниях двигателя и в эксплуатации - при переходах зима-лето) и измеренное, полученные рассогласования селектируют по минимуму с сигналом автомата приемистости (АП), отселектированную величину подают в пропорционально-интегральный (ПИ) регулятор, где формируют управляющее воздействие на дозатор расхода топлива.
Недостатком этого способа является следующее.
1. Частота вращения турбокомпрессора только косвенно связана с располагаемой мощностью на выходном валу двигателя, передаваемой на ВВ.
Поэтому поддержание заданной частоты вращения турбокомпрессора не гарантирует поддержание заданной мощности, передаваемой на ВВ. Т.о., снижается надежность работы ТВ СУ как источника тяги и, как следствие, снижается безопасность самолета.
2. Коррекция заданной частоты вращения турбокомпрессора по высоте полета при наличии только предельного ограничения по температуре газов за турбиной газогенератора, единого для всех режимов полета (взлет, номинал, крейсерский, ПМГ, ЗМГ), при наборе самолетом высоты приводит к раскрутке ротора турбокомпрессора. При этом пилот для сохранения ресурса газогенератора должен вручную снижать режим работы двигателя с помощью РУД.
Для предотвращения этого в способе управления турбовинтовой силовой установкой, заключающемся в том, что измеряют положение рычага (РУД) управления двигателем, частоту вращения турбокомпрессора, давление и температуру воздуха на входе в двигатель, температуру газов за турбиной газогенератора, формируют заданное значение частоты вращения турбокомпрессора как функцию от положения РУД, давления и температуры воздуха на входе в двигатель, задают предельное для данного двигателя значение температуры газов за турбиной газогенератора, сравнивают заданное значение частоты вращения турбокомпрессора и измеренное, сравнивают предельное для данного двигателя значение температуры газов за турбиной газогенератора (являющееся константой для всех двигателей данного типа с возможностью регулировки в ограниченном диапазоне при приемосдаточных испытаниях двигателя и в эксплуатации - при переходах зима-лето) и измеренное, полученные рассогласования селектируют по минимуму с сигналом автомата приемистости (АП), отселектированную величину подают в пропорционально-интегральный (ПИ) регулятор, где формируют управляющее воздействие на дозатор расхода топлива, дополнительно предельное ограничение по температуре газов за турбиной газогенератора корректируют по положению РУД, по положению РУД формируют заданное значение мощности двигателя, измеряют крутящий момент на выходном валу двигателя и частоту вращения свободной турбины (СТ), рассчитывают располагаемую мощность двигателя как произведение величин крутящего момента и частоты вращения СТ, сравнивают заданное значение мощности двигателя и располагаемую мощность двигателя, полученное рассогласование селектируют по минимуму с сигналом АП.
Т.о., обеспечивается такое управление расходом топлива в двигатель ТВ СУ, при котором поддерживается требуемая для данного режима мощность, передаваемая на ВВ, с сохранением ресурса горячей части двигателя без вмешательства пилота.
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные блок 1 датчиков, первый блок 2 нелинейности (БН), первый сумматор 3, первый усилитель 4, первый селектор 5 сигнала минимального уровня, второй селектор 6 сигнала минимального уровня, ПИ-регулятор 7, второй сумматор 8, второй усилитель 9, электрогидропреобразователь 10, дозатор 11, последовательно соединенные второй БН 12, третий сумматор 13, третий усилитель 14, последовательно соединенные третий БН 15, четвертый сумматор 16, четвертый усилитель 17, причем БН 12 и 15 подключены к блоку 1, а усилители 14 и 17 - к селектору 5, последовательно соединенные четвертый БН 18, блок 19 умножения (БУ), пятый усилитель 20, причем БН 18 и БУ 19 подключены к блоку 1, а усилитель 20 - к селектору 6. сумматоры 8, 13, 16 подключены к блоку 1 напрямую, а сумматор 3 - через БУ 21.
Устройство работает следующим образом. В БН 2 по заданной характеристике

в зависимости от положения РУД, получаемому из блока 1, формируется требуемая (задаваемая) мощность (Ne зад.) двигателя.
На выходе БУ 21 формируется располагаемая (фактическая) мощность (Ne фак.) двигателя как произведение измеренных в блоке 1 величин крутящего момента (Мкр.) на выходном валу двигателя и частоты (n ст) вращения свободной турбины.

Величина рассогласования подается на вход в усилитель 4 для масштабирования.
Аналогичным образом в БН 12 и 15 соответственно по положению РУД формируются заданные предельно допустимые для данного режима по РУД значения температуры газов за турбиной газогенератора и частоты вращения турбокомпрессора, которые в сумматорах 13 и 16 сравниваются с измеренными (полученными из блока 1) значениями.
Величина рассогласования подается соответственно на входы усилителей 14 и 17 для масштабирования.
Масштабированные (приведенные к одной размерности) сигналы селектируются в селекторе 5 по минимуму. Минимальный сигнал подается на вход селектора 6, где селектируется по минимуму с сигналом автомата приемистости (АП), формируемым с помощью БН 18, БУ 19, усилителя 20.
Селектированный сигнал из селектора 6 подается на вход в ПИ-регулятор 7, где формируется заданное положение дозатора.
Заданное положение дозатора в сумматоре 8 сравнивается с измеренным, полученным из блока 1.
По величине рассогласования в усилителе 9 формируется управляющий сигнал, который подается в электрогидропреобразователь 10.
Электрогидропреобразователь 10 управляет положением дозатора 11 и соответственно расходом топлива в камеру сгорания двигателя.
Т.о., обеспечивается управление расходом топлива по программе поддержания мощности двигателя, как наиболее важного параметра для ТВ СУ. При этом автоматически ограничиваются параметры газогенератора по режимам работы двигателя, что сохраняет ресурс горячей части.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Кеба И.В. Летная эксплуатация вертолетных ГТД. М.: Транспорт, 1976.
2. Руководство по эксплуатации электронного цифрового регулятора РЭД-65С двигателя ТВ7-117С. ПАКБ, Пермь, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2474712C2 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2489592C1 |
| СПОСОБ УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ СИЛОВОЙ УСТАНОВКОЙ | 2010 |
|
RU2436979C2 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2497001C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 1991 |
|
RU2006633C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ВЕРТОЛЕТА | 2010 |
|
RU2482024C2 |
| СПОСОБ УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ СИЛОВОЙ УСТАНОВКОЙ САМОЛЕТА | 2011 |
|
RU2493051C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронных системах (САУ) автоматического управления турбовинтовыми силовыми установками (СУ). Сущность изобретения заключается в том, что предельное ограничение по температуре газов за турбиной газогенератора корректируют по положению РУД, по положению РУД формируют заданное значение мощности двигателя, измеряют крутящий момент на выходном валу двигателя и частоту вращения свободной турбины (СТ), рассчитывают располагаемую мощность двигателя как произведение величин крутящего момента и частоты вращения СТ, сравнивают заданное значение мощности двигателя и располагаемую мощность двигателя, полученное рассогласование селектируют по минимуму с сигналом АП. Технический результат изобретения заключается в том, что обеспечивается управление расходом топлива по программе поддержания мощности двигателя, как наиболее важного параметра для ТВ СУ. При этом автоматически ограничиваются параметры газогенератора по режимам работы двигателя, что сохраняет ресурс горячей части. 1 ил.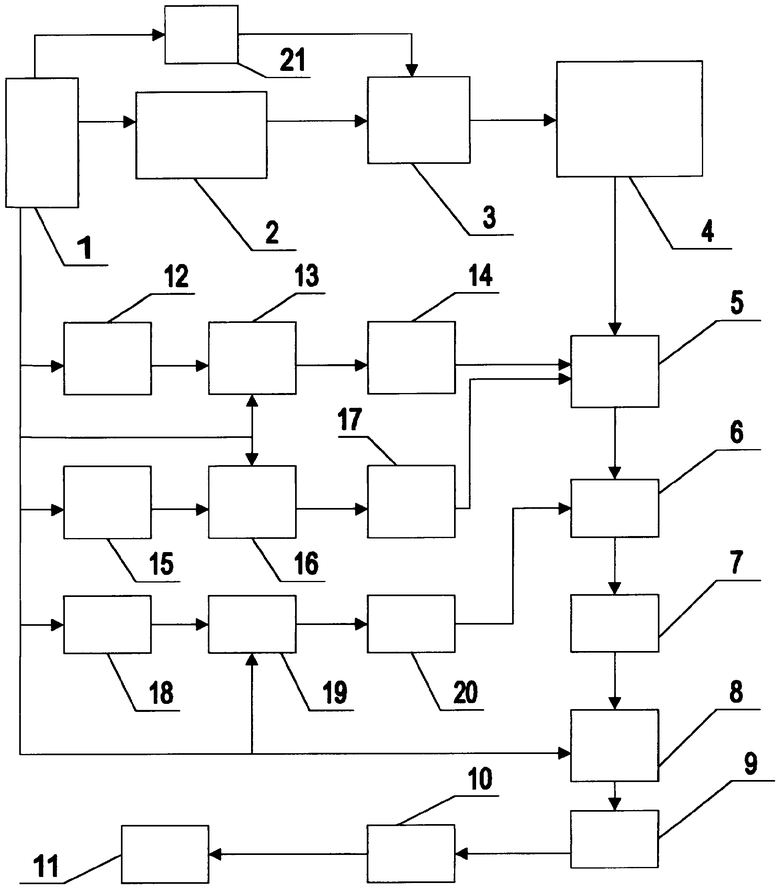
Способ управления турбовинтовой силовой установкой, заключающийся в том, что измеряют положение рычага (РУД) управления двигателем, частоту вращения турбокомпрессора, давление и температуру воздуха на входе в двигатель, температуру газов за турбиной газогенератора, формируют заданное значение частоты вращения турбокомпрессора как функцию от положения РУД давления и температуры воздуха на входе в двигатель, задают предельное для данного двигателя значение температуры газов за турбиной газогенератора, сравнивают заданное значение частоты вращения турбокомпрессора и измеренное, сравнивают предельное для данного двигателя значение температуры газов за турбиной газогенератора (являющееся константой для всех двигателей данного типа с возможностью регулировки в ограниченном диапазоне при приемосдаточных испытаниях двигателя и в эксплуатации - при переходах зима-лето) и измеренное, полученные рассогласования селектируют по минимуму с сигналом автомата приемистости (АП), отселектированную величину подают в пропорционально-интегральный (ПИ) регулятор, где формируют управляющее воздействие на дозатор расхода топлива, отличающийся тем, что дополнительно предельное ограничение по температуре газов за турбиной газогенератора корректируют по положению РУД, по положению РУД формируют заданное значение мощности двигателя, измеряют крутящий момент на выходном валу двигателя и частоту вращения свободной турбины (СТ), рассчитывают располагаемую мощность двигателя как произведение величин крутящего момента и частоты вращения СТ, сравнивают заданное значение мощности двигателя и располагаемую мощность двигателя, полученное рассогласование селектируют по минимуму с сигналом АП.

