Настоящее изобретение в целом относится к конструкциям датчиков, работающих на вихревых токах, в которых положение чувствительного элемента по отношению к системе катушек определяют на основании зависящих от положения потерь на вихревые токи. В частности, настоящее изобретение относится к чувствительному элементу датчика такой конструкции.
Во многих областях техники требуется определение положения движущегося объекта с точностью, соответствующей решаемой задаче. Для этого были разработаны многочисленные системы датчиков, в которых может измеряться по меньшей мере относительное положение двух элементов с достаточно высокой точностью, например, посредством оптического, электрического, магнитного и других взаимодействий. В частности, в тех областях техники, в которых преобладают очень тяжелые условия окружающей среды, например, высокие эксплуатационные температуры в сочетании с сильными магнитными полями, которые, например, могут быть вызваны большими рабочими токами, часто применяют конструкции датчиков, в которых для определения положения одного из компонентов используют выработку вихревых токов в зависимости от положения. Для этого в некоторых вариантах выполнения такого вихревого датчика регистрируют вызываемое вихревыми токами демпфирование одной или нескольких катушек, при этом по меньшей мере одна катушка выполнена неподвижной, а подвижная содержит дорожку из соответствующего материала, благодаря которой имеет место выработка вихревых токов в зависимости от положения и, в результате, демпфирование. Таким образом, на основании выработки вихревых токов в зависимости от положения возможно определение положения движущейся дорожки по отношению к одной или нескольким неподвижным катушкам посредством корреляции вызываемого таким образом демпфирования, которое может определяться, например, на основании изменений частоты, фазы, амплитуды или комбинации этих величин, и особого выполнения дорожки.
В этом отношении важной областью применения является определение положения ротора электрической машины, чтобы посредством этого определить надлежащие управляющие сигналы для подачи надлежащих значений тока и напряжения. Например, во многих случаях, в которых от электрической машины требуются изменяющиеся в значительной степени скорости вращения и умеренно большая ширина диапазона управления, является важной фиксация значений напряжения или тока с высокой разрешающей способностью по времени, причем во многих случаях требуется относительно точное определение положения ротора. Так в частности, для эффективного режима работы, например, синхронных машин с постоянным возбуждением или бесщеточных машин постоянного тока, важно знать с высокой точностью положение ротора в пределах углового участка, в соответствии с применяемым числом полюсов магнитов, чтобы иметь возможность подачи тока на обмотки статора по заданной схеме, благодаря чему устанавливается желаемый режим работы. Для этого часто применяют бесконтактные чувствительные механизмы, в которых, например, используются основанные на магнитных переключателях или датчиках Холла конструкции датчиков, которые однако являются относительно дорогостоящими, а также чувствительными к помехам, причем как правило, не достигается пространственная разрешающая способность, требующаяся для многих целей применения. Так как, в частности, при применении с целью регистрации углового положения часто требуется пространственная тесная связь чувствительного элемента с ротором электрической машины, вблизи чувствительного элемента могут возникать большие токи или же магнитные поля, а также, относительно высокие температуры, так что здесь особенно оправдали себя датчики, работающие на принципе вихревых токов, поскольку с одной стороны, они могут быть выполнены таким образом, что они незначительно подвержены помехам вследствие сильных внешних магнитных полей, а с другой стороны, они обеспечивают возможность высокой пространственной разрешающей способности определения положения ротора, даже при приведении в действие датчика.
В таких традиционных конструкциях датчиков обычно применяют дисковый датчик, который, например, соединен с ротором электрической машины, и имеет проходящую по периметру соответствующую дорожку, которая например, выполнена в форме синусоидально изменяющегося металлического проводника, например, из меди или алюминия и которая подвергается считыванию системой катушек. Таким образом, этот датчик находится в механическом контакте с ротором электрической машины, и поэтому, наряду с желаемой защитой от помех, с учетом сильных магнитных полей, он должен быть кроме того адаптирован к условиям эксплуатации электрической машины, например, в отношении преобладающей температуры, требуемого диапазона частоты вращения и т.п.. С другой стороны, с учетом интеграции системы датчиков, работающих на вихревых токах, требуется высокая постоянная точность, даже при массовом изготовлении, чтобы обеспечить возможность равномерного функционирования датчиков без трудоемких котировочных работ при монтаже на месте применения. Поэтому в традиционных дисковых датчиках, как правило, требуются улучшенные механические свойства в отношении прочности и биения, а также необходимые электрические свойства, то есть, зависящее от положения регулирование проводимости при помощи изменяющейся примерно по синусоидальному закону дорожки, и соответствующие затраты при изготовлении дисковых датчиков, их окончательном монтаже и юстировке.
Исходя из описанной выше ситуации, задача настоящего изобретения состоит в том, чтобы предложить чувствительный элемент для датчика, работающего на вихревых токах, в котором могут быть улучшены свойства в отношении механической стабильности и точности, в сочетании с требуемыми электрическими параметрами, и/или эти свойства могут быть достигнуты при уменьшенных затратах.
Согласно одному аспекту настоящего изобретения эта задача решена благодаря созданию датчика положения для создания зависящих от положения потерь на вихревые токи в системе катушек датчика. Датчик положения содержит выполненный из пластмассы основной элемент, поверхность которого при работе ориентирована в направлении системы катушек датчика. Кроме того, датчик положения содержит дорожку, образованную в основном элементе при помощи углублений и/или выступов на поверхности пластмассы, которая проходит вдоль заданного направления движения и варьируется по меньшей мере в одном направлении, перпендикулярном заданному направлению движения. Кроме того, предусмотрено покрытие, которое нанесено по меньшей мере на дорожку и содержит проводящий материал.
Таким образом, датчик положения согласно изобретению содержит выполненный из пластмассы основной элемент, который в отношении состава материала, а также формы и размеров, может быть выполнен очень разнообразными и эффективными способами, с высокой точностью и при небольших затратах на изготовление. При этом форма поверхности датчика положения, то есть, поверхности, на которой расположена дорожка выполненная в соответствии с задачей выработки вихревых токов в зависимости от положения, прежде всего задается посредством профилирования полимерного материала, так что дорожка может быть изготовлена с высокой точностью и малыми затратами, например, на том же рабочем этапе, что и основной элемент. Таким образом, например, пространственная структура дорожки, которая образована вдоль направления движения, то есть, направления, вдоль которого при работе датчика положения должно осуществляться определение его местоположения по отношению к системе катушек датчика, может быть выполнена с высокой точностью при помощи конструктивных мероприятий, например, при помощи формы для литья под давлением, в то время как электрические свойства дорожки устанавливаются при помощи покрытия. Таким образом, с одной стороны, благодаря полимерному материалу основного элемента достижима желаемая механическая стабильность, адаптированная к соответствующей задаче, а с другой стороны, при небольших затратах на изготовление обеспечено очень точное выполнение формы дорожки, которая в конечном итоге обеспечивает желаемую разрешающую способность в отношении местоположения. Электрические свойства, то есть, проводимость дорожки, обеспечены при помощи покрытия, которое таким образом предоставляет большую степень гибкости в отношении выбора подходящих материалов, например, соответствующих металлов, сплавов, полупроводниковых материалов, проводящих пластмасс и тому подобного, причем нанесение покрытия является менее критичным в отношении достигаемой общей точности образующейся посредством этого проводящей дорожки, так как зависящая от положения проводимость дорожки по существу задана геометрией профиля, выполненного в полимерном материале.
В одном варианте выполнения дорожка образована в виде выступа на поверхности. Это означает, что в данном варианте выполнения поверхность, обращенная при работе к системе катушек датчика, может иметь вдоль направления движения надлежащим образом выполненный выступ, который имеет желаемую пространственную вариацию. Вследствие выступания выполненной на поверхности дорожки во время работы автоматически образуются различные расстояния выступающих и не выступающих областей по отношению к системе катушек датчика, так что конструктивно достигается отчетливое различие в параметрах вихревых токов в пониженной по сравнению с поверхностью дорожки поверхности основного элемента, которая таким образом оказывает существенно меньшее влияние на выработку вихревых токов, даже если поверхность частично или полностью покрыта проводящим материалом, с целью упрощения процесса покрытия.
В следующем варианте выполнения высота дорожки вдоль заданного направления движения является постоянной, а ширина дорожки вдоль заданного направления движения является переменной. Это означает, что возможность выработки вихревых токов в зависимости от положения создается путем боковой вариации, то есть, путем изменения ширины дорожки, в то время как дорожка соответственно приподнята над поверхностью по существу на постоянную величину.
В следующем варианте выполнения варьируется высота дорожки вдоль заданного направления движения. Таким образом, в этом варианте выполнения выработка вихревых токов в зависимости от положения может достигаться посредством варьирующейся высоты дорожки и, тем самым, посредством варьирующегося расстояния поверхности дорожки и, таким образом, покрытия, которое служит в качестве сигнальной поверхности, по отношению к неподвижной системе катушек датчика. Соответствующее выполнение топографии дорожки в пластмассовом основном элементе может быть эффективным образом реализовано посредством применения надлежащего способа изготовления, например, способа литья под давлением или тому подобного. Таким образом, надлежащий профиль по высоте может изготавливаться эффективным способом, обладающим возможностью воспроизведения.
В следующем варианте выполнения в сочетании с высотой дорожки варьируется также и ширина дорожки вдоль заданного направления движения. Таким способом очень эффективным образом могут модулироваться параметры ответа дорожки на варьирующееся магнитное поле, вызываемое системой катушек датчика, поскольку благодаря этому в распоряжении имеются две степени свободы, которые совместно обеспечивают возможность сильного изменения на единицу длины вдоль направления движения. Кроме того, благодаря двукратной модуляции параметров вихревых токов при необходимости возможно достижение меньшей допустимой погрешности, так как соответствующие неточности изготовления в одном измерении при известных обстоятельствах сказываются менее сильно.
В одном варианте выполнения заданным направлением движения является вращательное движение. Это означает, что датчик положения выполнен для того, чтобы определять положение вдоль соответствующей вращательному движению криволинейной траектории, при этом в одном благоприятном варианте выполнения может определяться угловое положение ротора соответствующей машины, по меньшей мере в пределах желаемого углового диапазона. В этом случае датчик положения согласно изобретению может применяться для определения положения ротора по меньшей мере в пределах представляющего интерес углового участка, что является важным, например, в синхронных машинах с постоянным возбуждением или в бесщеточных двигателях постоянного тока, чтобы обеспечить оптимальное управление катушками статора.
В следующем варианте выполнения основной элемент предназначен для закрепления на роторе или соединенном с ним элементе ротационной машины. Таким образом, датчик положения согласно изобретению может быть изготовлен эффективным и точным способом, как это описано выше, причем кроме того обеспечена возможность его соединения надлежащим образом с ротационной машиной. Таким образом может быть реализовано независимое и, тем самым, экономичное и точное изготовления датчика положения, при этом возможна большая степень гибкости при адаптации к соответствующей ротационной машине путем надлежащего выбора, например, форм для литья под давлением или тому подобного. Таким образом, обеспечена большая степень независимости при изготовлении ротационной машины и датчика положения, и тем не менее, при выполнении основного элемента могут быть учтены особенности ротационной машины.
В одном благоприятном варианте выполнения поверхность ориентирована перпендикулярно оси вращения ротора. Это означает, что при таком расположении выполненная на поверхности дорожка и образованная посредством этого сигнальная поверхность также ориентированы перпендикулярно оси вращения ротора, так что образуется «осевая» конструкция, в которой, следовательно, система катушек датчика находится на расстоянии в осевом направлении от поверхности и, тем самым, от дорожки. Таким способом может быть получена очень компактная в радиальном направлении конструкция, так как система катушек датчика может быть размещена в пределах определяемого ротором диаметра, если в осевом направлении имеется достаточное монтажное пространство.
В следующем варианте выполнения поверхность ориентирована параллельно оси вращения ротора. Это означает, что поверхность и, тем самым, дорожка, могут быть выполнены в направлении периметра дискового датчика, и, таким образом, подвергаться считыванию в радиальном направлении посредством системы катушек датчика. Таким образом при необходимости может быть получена компактная в осевом направлении конструкция, что может быть благоприятным, в частности, при определенных применениях в области автомобилестроения, если ротационная машина расположена на приводном валу между двигателем и соответствующей передачей.
В одном варианте выполнения на поверхности также предусмотрено покрытие, по меньшей мере частично. Как было упомянуто выше, эффективная модуляция параметров вихревых токов может быть достигнута благодаря топографии дорожки, при этом точное положение покрытия не является существенным. Это означает, что при необходимости покрытие может быть нанесено на дорожку или же на поверхность, частично или полностью, благодаря чему, в зависимости от применяемого способа изготовления, может получиться соответствующее упрощение процесса изготовления, так как селективное нанесение покрытия не требуется. В других случаях состав материала покрытия может быть выбран таким, что он с одной стороны, обеспечивает желаемую проводимость, а с другой стороны, также обеспечивает возможность желаемого защитного действия или пассивирования основного элемента или, по меньшей мере, поверхности, так что эффективным образом могут быть установлены как электрические параметры, так и свойства поверхности.
В следующем варианте выполнения покрытие нанесено по меньшей мере на одну следующую поверхность основного элемента. Как описано выше, покрытие может при необходимости применяться в качестве пассивирующего материала, так что благоприятным образом им могут быть также покрыты и другие области основного элемента. Кроме того, благодаря тому, что по меньшей мере одна следующая поверхность основного элемента снабжена покрытием, образуется возможность выбора из очень большого количества различных способов нанесения покрытий, которые не позволяют производить селективное осаждение или позволяют производить его лишь с большими затратами, так что здесь имеет место большая степень гибкости в отношении состава материала покрытия, а также в отношении затрат на изготовление.
В следующем варианте выполнения покрытие содержит металл. Таким образом, проводимость может быть обеспечена очень эффективным способом, так как в распоряжении имеется множество металлов или сплавов, которые обладают во-первых, желаемой высокой проводимостью, а во-вторых - надлежащими свойствами в отношении химической стабильности и тому подобного. В других случаях соответствующий металл может содержаться в покрытии произвольным образом, чтобы обеспечивать тем самым требуемую проводимость, а также соответствовать механическим и химическим критериям.
В одном примерном варианте выполнения покрытие нанесено в виде металлического слоя. Таким способом может быть достигнута очень эффективная модуляция проводимости, при этом количество применяемого металла может оставаться относительно малым, так как толщина металлического слоя может быть установлена надлежащим образом. При этом металлическим слоем могут быть снабжены лишь поверхность дорожки, то есть, сигнальная поверхность дорожки, главным образом служащая для выработки вихревых токов, или также следующие области основного элемента, или весь основной элемент, причем в этом случае получается особенно эффективная возможность изготовления. Это означает, что в таком случае основной элемент вместе с выполненной в нем дорожкой может быть изготовлен из пластмассы с высокой точностью, в то время как металлический слой может затем наноситься, не требуя дополнительных мероприятий для целенаправленного нанесения или для селективного удаления областей покрытия.
В одном варианте выполнения покрытие содержит по меньшей мере один первый частичный слой и выполненный на нем второй частичный слой, причем первый и/или второй частичные слои выполнены в виде проводящих слоев. Это означает, что благодаря наличию слоистой структуры покрытия образуется высокая степень гибкости при установке желаемых свойств, например, в отношении проводимости, стойкости к тяжелым окружающим условиям, например, в отношении коррозии, механической прочности и тому подобного. Например, слоистая структура может быть нанесена посредством того, что вначале непосредственно на дорожку или же на основной элемент наносят первый частичный слой, который обеспечивает требуемую высокую адгезию для осаждаемого на нем затем материала. В данном случае этот материал может выбираться, например, с учетом желаемой проводимости. При необходимости, в зависимости от применения, могут быть присоединены один или несколько дополнительных слоев. В одном примерном варианте выполнения самым наружным частичным слоем покрытия является проводящий слой, так что при заданном среднем расстоянии между системой катушек датчика и датчиком положения благодаря расположению проводящего слоя в качестве самого наружного слоя образуется относительно высокая чувствительность в отношении выработки вихревых токов. В другом варианте выполнения наружный частичный слой покрытия выполнен в качестве защитного слоя для одного или нескольких расположенных под ним частичных слоев, из которых по меньшей мере один выполнен в виде проводящего слоя. Таким образом могут быть выбраны желаемые проводящие материалы, например металлы, сплавы металлов и тому подобное, с учетом их электрических параметров, в то время как самый наружный частичный слой может служить в качестве пассивирующего слоя, так что, например, надлежащим образом могут быть установлены стойкость к коррозии, твердость поверхности и тому подобные параметры покрытия в целом.
При этом самый наружный частичный слой может быть выполнен в виде умеренно тонкого слоя, так что эффективный «воздушный зазор» между системой катушек датчика и дорожкой не увеличивается излишним образом. Благодаря наличию защитного слоя, который, в свою очередь, может быть нанесен на основном элементе лишь на дорожку, или же на проводящий материал, или также на области большего размера, или на всю поверхность, образуется повышенная надежность при изготовлении датчика положения и при обращении с ним, уже перед монтажом в желаемое место применения и во время него, а также приводит к надежному функционированию во время эксплуатации датчика положения даже при тяжелых окружающих условиях. В некоторых вариантах выполнения частичный слой, служащий в качестве проводящего материала, и частичный слой, служащий в качестве защитного слоя, выполнены не одинаковым образом в отношении покрытия поверхности, то есть, проводящий слой может быть ограничен по существу областью дорожки, в то время как защитный слой может быть выполнен проходящим по большим областям поверхности основного элемента, чтобы придать основному элементу в целом, или по меньшей мере в отдельных областях, свойства поверхности, обеспечиваемые посредством защитного слоя.
В следующем варианте выполнения покрытие содержит проводящий полупроводниковый материал, который таким образом совместно с дорожкой обеспечивает желаемые параметры вихревых токов в зависимости от положения. Например, на материал основания, то есть, на основной элемент или его области, очень эффективным образом, при помощи испытанных способов, например, CVD (химическое осаждение из паровой фазы), при относительно низких температурах могут наноситься распространенные полупроводниковые материалы, например, аморфный кремний и тому подобное, так что в общей сложности возникают небольшие затраты на изготовление при одновременной высокой точности способа изготовления. Степень желаемой проводимости также может устанавливаться в широком диапазоне, посредством соответствующего легирования полупроводникового материала. В некоторых случаях проводящий полупроводниковый материал может также служить в качестве эффективного пассивирования полимерного материала, так что при определенных условиях дополнительный защитный слой не требуется, и тем не менее достигается высокая степень химической и механической стойкости поверхности основного элемента.
В одном варианте выполнения дорожка выполнена в заданном направлении движения в виде непрерывной дорожки. Это означает, что вдоль направления движения, то есть, вдоль продольного направления дорожки, она является непрерывной, так что независимо от конструкции системы катушек датчика вдоль направления движения могут непрерывно вырабатываться вихревые токи. Таким способом, благодаря непрерывному изменению параметров вихревых токов, может быть достигнута высокая степень разрешающей способности в отношении местоположения при заданных размерах датчика положения, то есть, при заданной длине в заданном направлении движения. Так как, в частности, достигаемые в конечном итоге зависящие от положения параметры вихревых токов реализованы посредством конструктивных мероприятий, то есть, посредством выполнения дорожки на поверхности основного элемента, то могут также изготавливаться относительно комплексные формы дорожки, например, синусоидальные или другие криволинейные формы, в качестве непрерывных элементов, форма которых может затем по существу сохраняться во время последующего монтажа, а также при эксплуатации.
В следующем варианте выполнения дорожка имеет в заданном направлении движения периодические в пространстве участки, так что в пределах каждого периодического участка может быть достигнута желаемая высокая разрешающая способность в отношении местоположения. Таким образом, в датчиках положения ротора, в которых требуется зависящее от угла определение положения ротора в пределах определенного углового участка, в соответствии с применяемыми парами полюсов, в дорожке может эффективным способом воспроизводиться «электрический» угол поворота, благодаря наличию соответствующего количества периодических участков, так что в пределах каждого важного в электрическом отношении углового участка может осуществляться желаемое точное управление катушками статора ротационной машины.
В следующем варианте выполнения основной элемент содержит образованную из пластмассы посредством углублений и/или выступов на поверхности дополнительную дорожку, которая проходит вдоль заданного направления движения и варьируется по меньшей мере в одном направлении, перпендикулярном заданному направлению движения. Благодаря наличию этой дополнительной дорожки при необходимости может быть надлежащим образом установлен диапазон измерений, посредством того, что, например, пространственная разрешающая способность уменьшается в пользу более длинного пути измерения. Это означает, что благодаря различной модуляции дорожки и дополнительной дорожки при их взаимодействии может быть расширен диапазон измерений, посредством того, что, например, дорожка обеспечивает требуемую точную разрешающую способность в пределах небольшого периодически повторяющегося участка, в то время как дополнительная дорожка обеспечивает возможность идентификации подвергаемого считыванию в данный момент участка.
В следующем аспекте настоящего изобретения упомянутая выше задача решена посредством датчика положения для создания зависящих от положения потерь на вихревые токи в системе катушек датчика. При этом датчик положения содержит основной элемент, выполненный из непроводящего материала основания и проводящего материала. Кроме того, предусмотрена образованная проводящим материалом дорожка, которая заделана в непроводящий материал основания, проходит вдоль заданного направления движения и варьируется по меньшей мере в одном направлении, перпендикулярном заданному направлению движения, для выработки зависящих от положения вихревых токов.
В следующем варианте выполнения кроме того предусмотрена поверхность, которая при работе датчика положения должна быть ориентирована по направлению к системе катушек датчика и является по существу непрофилированной.
Благодаря этой форме выполнения датчика положения проводящий материал расположен в основном элементе таким образом, что в нем образована дорожка, при этом благодаря заделке дорожки в основной элемент и, в следующем варианте выполнения, благодаря покрывающей дорожку поверхности, достигается высокая степень механической и химической стойкости к повреждениям при очень тяжелых условиях эксплуатации. Кроме того, благодаря этой конструкции образуется возможность выполнить дорожку, применяемую для выработки вихревых токов в зависимости от положения, точным и обладающим возможностью воспроизведения способом, при этом достигается желаемая высокая механическая стабильность датчика положения, или проводящий материал может способствовать повышению стабильности непроводящего материала основания основного элемента.
В одном примерном варианте выполнения проводящий материал выполнен в форме профилированного элемента. Это означает, что проводящий материал в форме профилированного элемента, например, в форме надлежащим образом выполненной металлической детали, при изготовлении основного элемента может быть эффективным образом помещен в непроводящий материал основания, например, посредством расположения в форме для литья под давлением или подобным образом, так что может быть достигнут очень эффективный процесс изготовления с высокой степенью возможности воспроизведения. В одном варианте выполнения профилированный элемент содержит первые области с первым расстоянием от поверхности и вторые области со вторым расстоянием от поверхности, большим первого. Таким образом, профилированный элемент может быть выполнен в виде стабильного непрерывного элемента, например, металлической детали, и расположен в непроводящем материале основания надлежащим образом, так что области с первым меньшим расстоянием от поверхности могут служить в качестве эффективной дорожки для выработки вихревых токов в зависимости от положения, в то время как вторые области с большим расстоянием могут служить для механической стабилизации непроводящего материала основания и/или для лучшего позиционирования профилированного элемента, не оказывая существенного влияния на выработку вихревых токов. Это означает, что, в частности, если профилированный элемент выполнен в качестве элемента, обладающего собственной стабильностью, то таким образом может быть достигнуто эффективное позиционирование этого элемента в непроводящем материале основания, а также повышение собственной стабильности датчика положения.
Основной элемент выполнен для регистрации положения при вращательном движении, так что он выгодным образом может применяться в соединении с электрическими машинами, например, с синхронными машинами с постоянным возбуждением, бесщеточными машинами постоянного тока, асинхронными машинами и тому подобным, при этом датчик положения, как это уже подробно описано в отношении предыдущего аспекта, адаптирован с учетом требуемых свойств, например, химической стабильности, механической стабильности, формообразования и тому подобного, при этом могут применяться экономичные и точные способы изготовления, обладающие возможностью воспроизведения. Кроме того, в этом варианте датчика положения, то есть, в виде непроводящего материала основания с интегрированным проводящим материалом в форме надлежащей дорожки, могут быть предусмотрены как осевой, так и радиальный варианты выполнения, так что высокая степень гибкости выполнения достигается также и в отношении положения или же типа конструкции датчика.
Следующие варианты выполнения описаны в прилагаемых пунктах формулы изобретения, а также вытекают из последующего детального описания следующих примерных вариантов выполнения со ссылкой на прилагаемые чертежи, на которых изображено:
фиг.1a - схематический перспективный вид датчика положения для ротационной машины, содержащего одиночную выступающую дорожку согласно одному варианту выполнения,
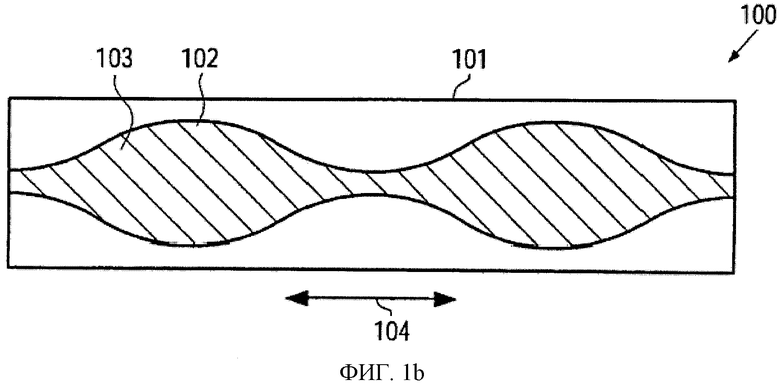
фиг.1b - схематический вид сверху датчика положения для линейного движения согласно одному примерному варианту выполнения,
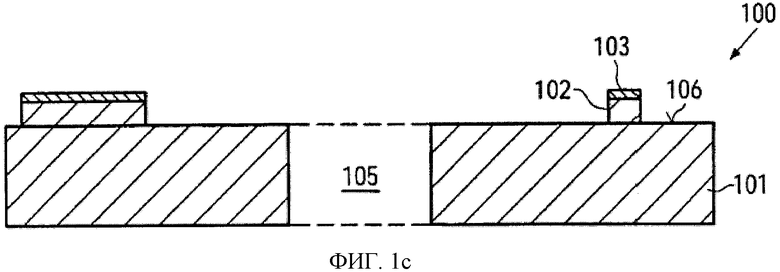
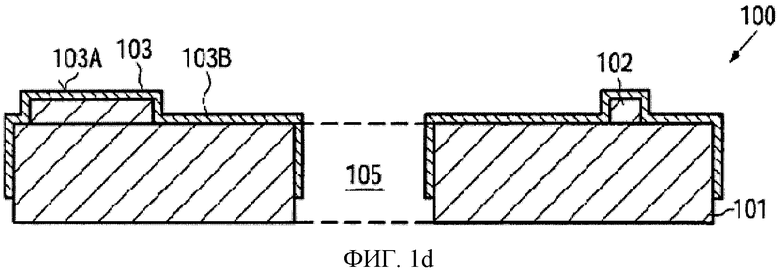
фиг.1c и 1d - схематические виды в поперечном сечении датчика положения согласно фиг.1a в соответствии с различными вариантами выполнения,
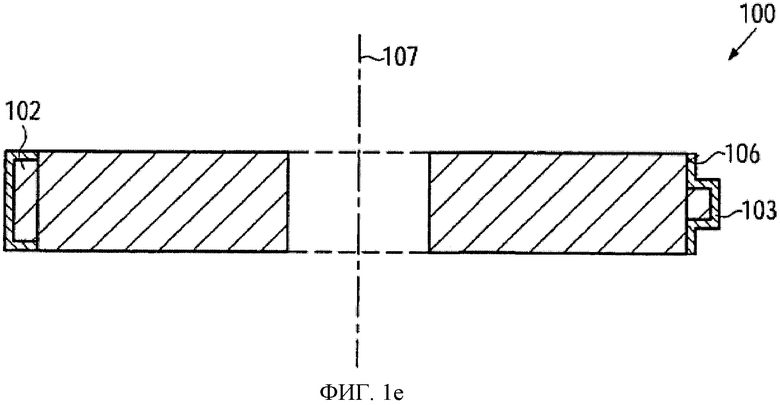
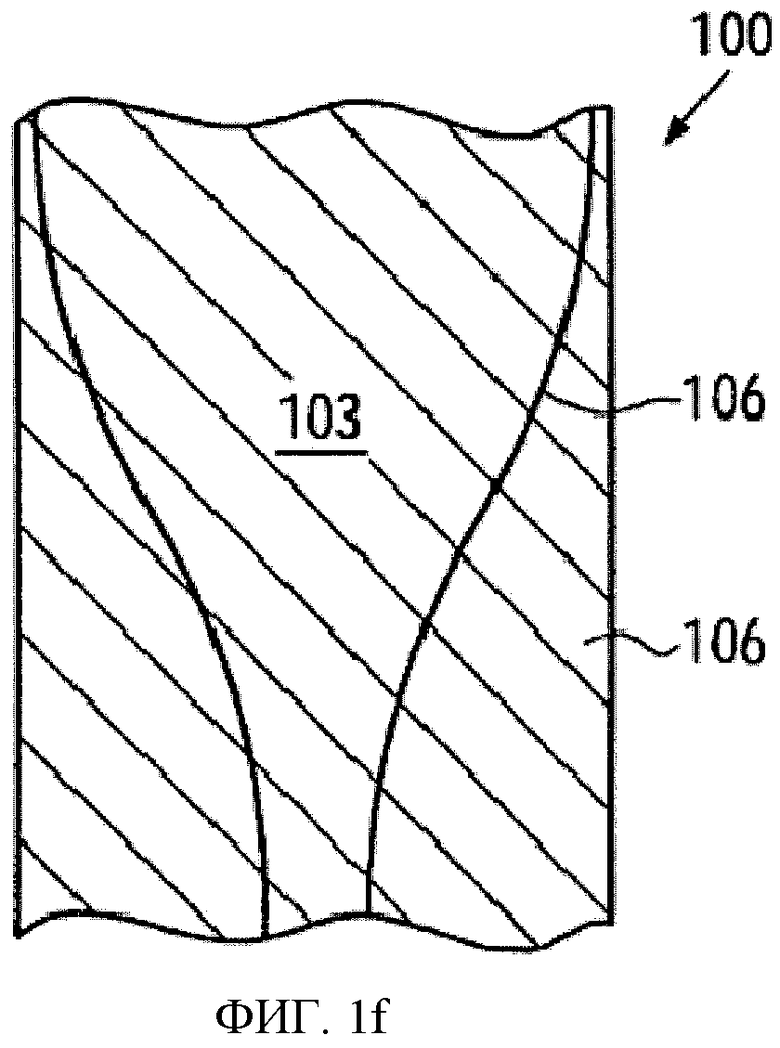
фиг.1e и 1f- соответственно вид в поперечном сечении, или же частичный вид сверху датчика положения для ротационных машин в радиальном варианте выполнения, согласно примерным вариантам выполнения,
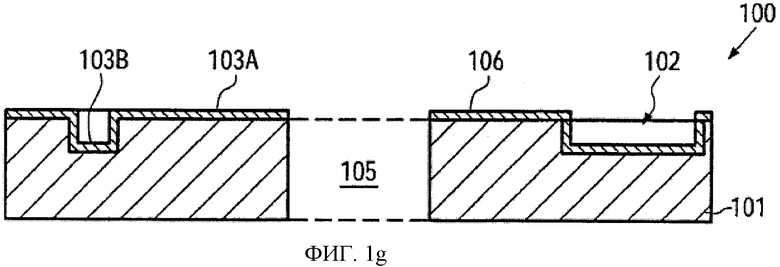
фиг.1g - схематический вид в поперечном сечении варианта выполнения, в котором дорожка в полимерном материале предусмотрена в форме надлежащим образом выполненных «понижений» или же выемок, согласно примерным вариантам выполнения,
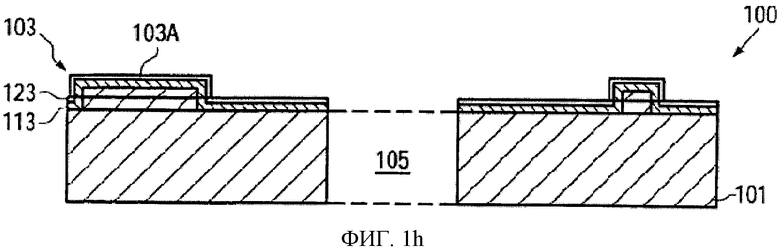
фиг.1d - схематический вид в поперечном сечении, на котором для образования желаемой проводимости предусмотрено покрытие в форме нескольких частичных слоев,
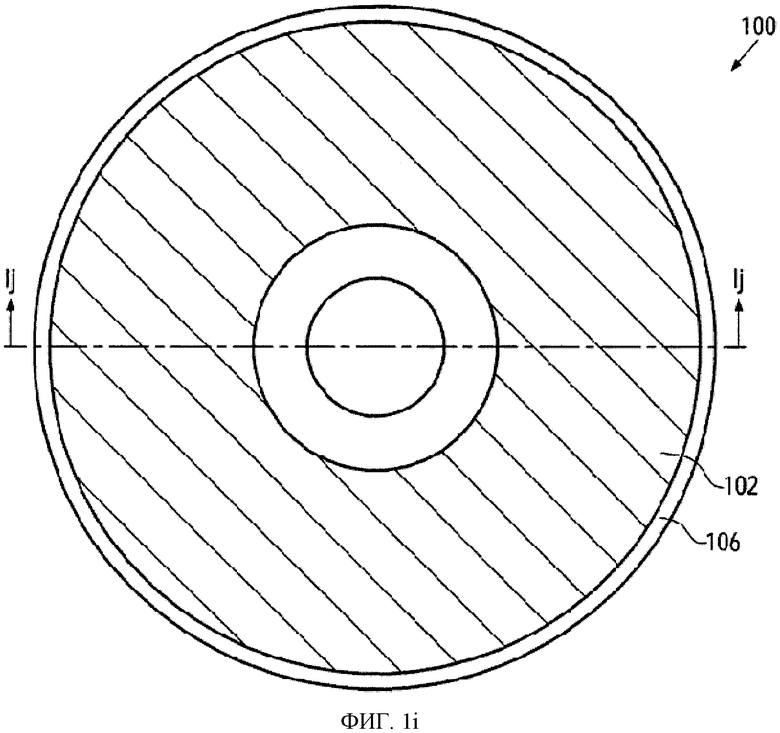
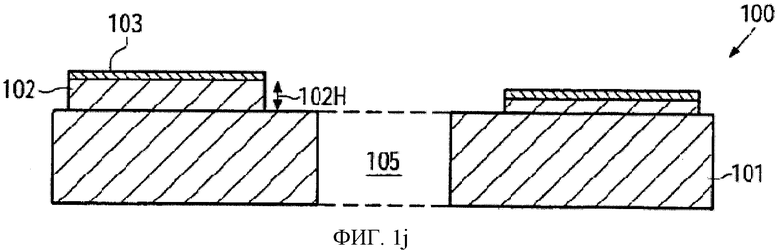
фиг.1i-1j - соответственно вид сверху, или же вид в поперечном сечении, на которых параметры выработки вихревых токов в зависимости от положения обеспечены изменением высоты дорожки,
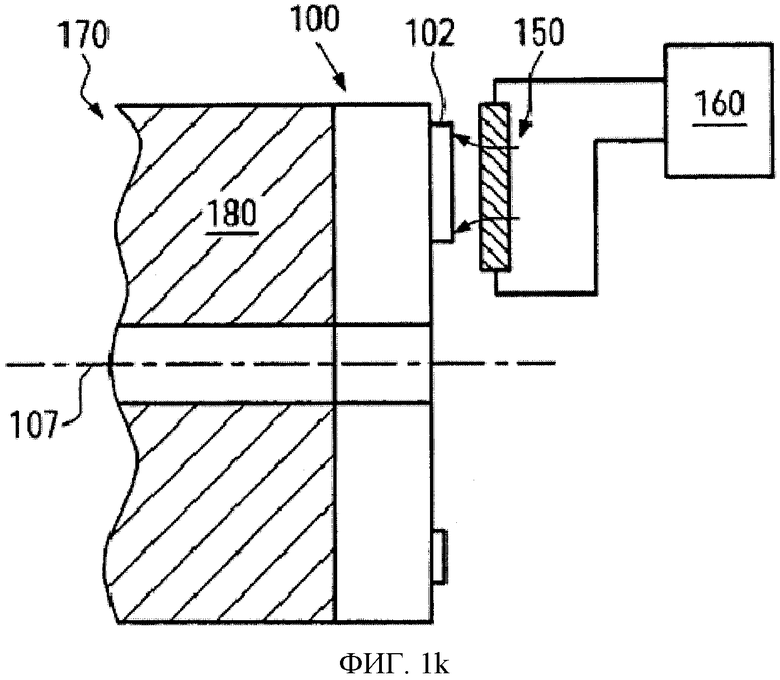
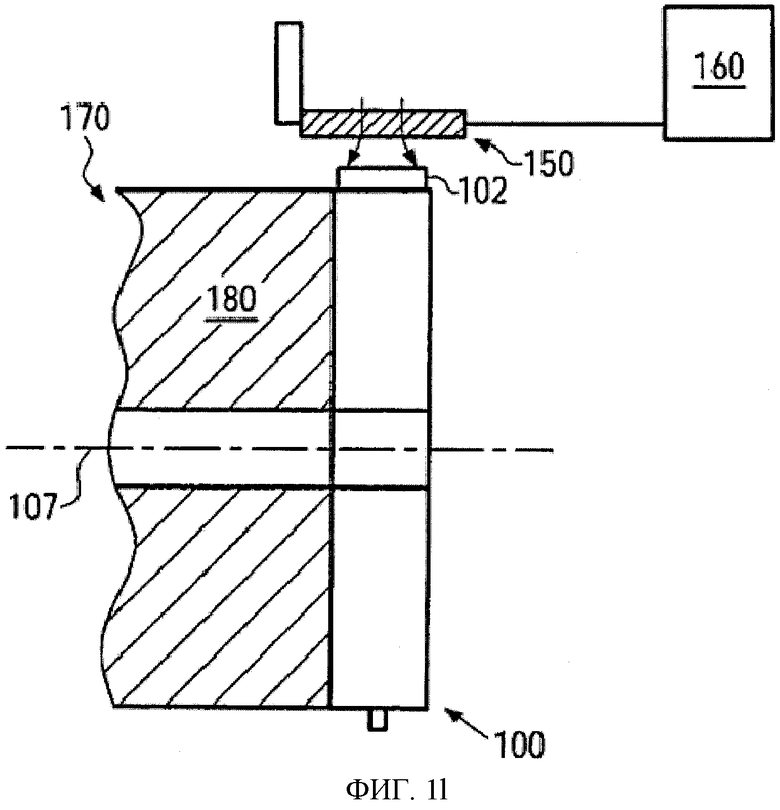
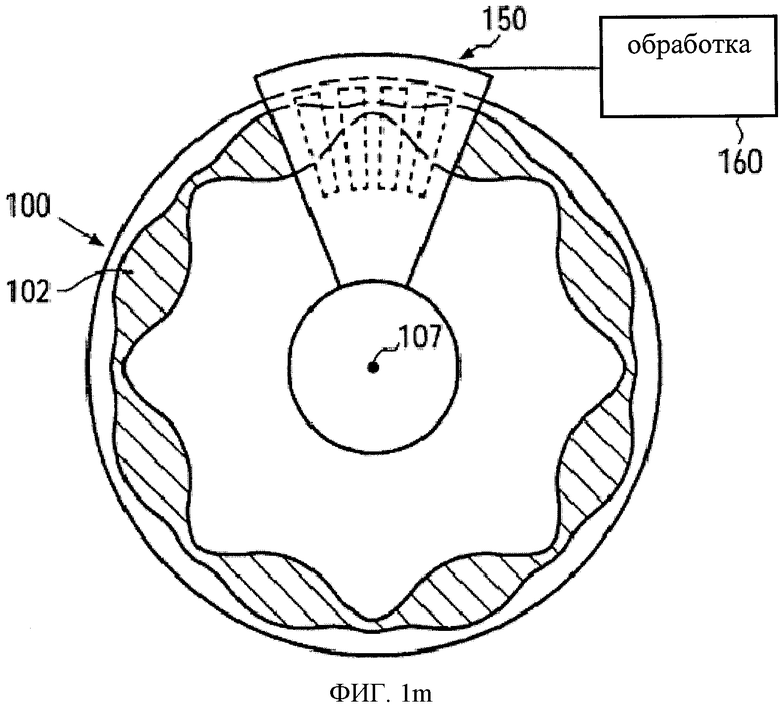
фиг.1k-1m - схематические виды в поперечном сечении, или же вид сверху датчика положения в сочетании с системой катушек датчика, согласно примерным вариантам выполнения,
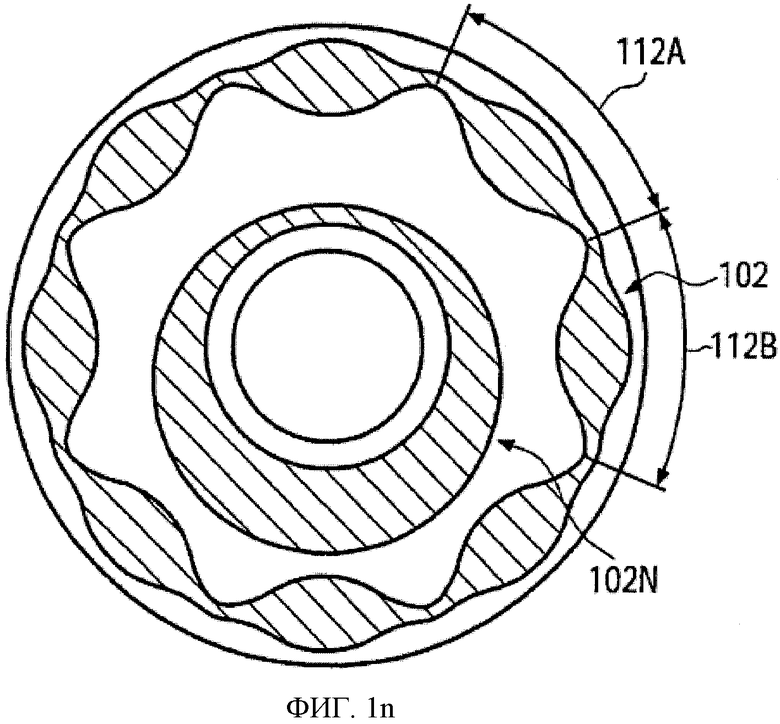
фиг.1n - схематический вид сверху датчика положения с несколькими катушками датчика, согласно примерным вариантам выполнения,
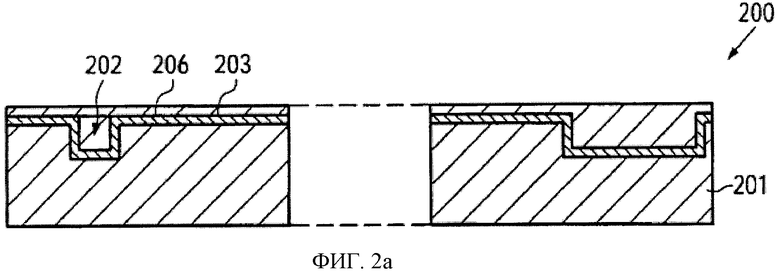
фиг.2a-2c - схематические виды в поперечном сечении датчика положения, содержащего интегрированный в непроводящий материал основания проводящий материал, который образует зависящую от положения дорожку, согласно следующим примерным вариантам выполнения, и
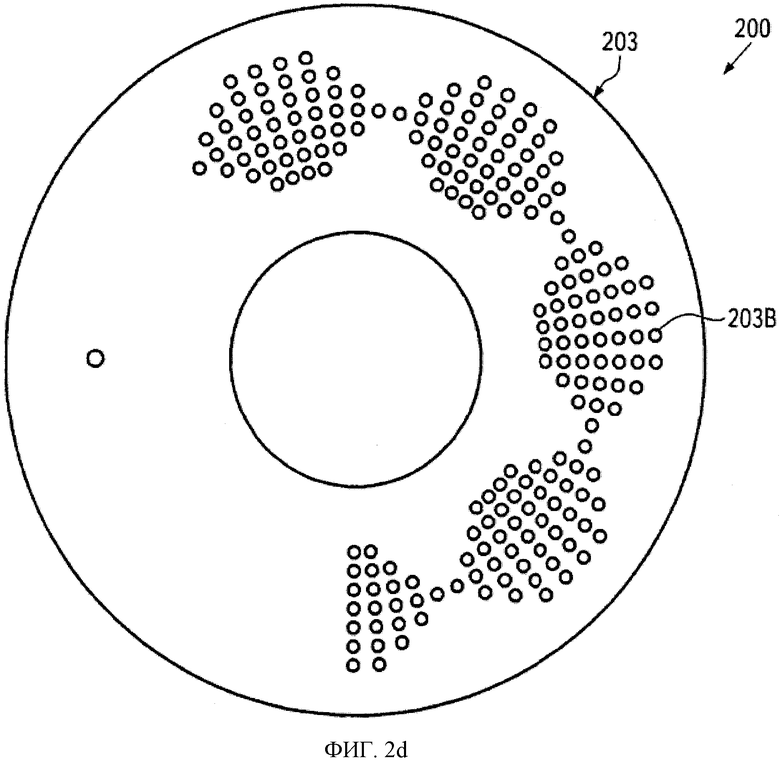
фиг.2d - схематический вид сверху датчика положения, на котором показано по существу двухмерное структурирование проводящего материала.
Далее со ссылками на прилагаемые чертежи описаны следующие примерные варианты выполнения изобретения.
На фиг.1a схематически показан перспективный вид датчика 100 положения, который в показанном варианте выполнения предназначен для определения углового положения ротора ротационной машины, в частности, электрической машины, например, синхронной машины с постоянным возбуждением и т.д. Датчик 100 положения содержит основной элемент 101, который в показанном варианте выполнения изготовлен из пластмассы, при этом в качестве пластмассы может применяться произвольная подходящая смесь материалов. В частности, могут применяться подходящие материалы, которые обладают требуемой механической стабильностью в диапазоне частот вращения соответствующей ротационной машины. Кроме того, толщина основного элемента 101, который выполнен здесь в форме диска с соответствующими отверстиями 105 для закрепления на оси вращения или на роторе ротационной машины, может быть выбрана надлежащим образом, так что достигается требуемая стабильность и, тем не менее, обеспечивается небольшая монтажная высота. Например, толщина основного элемента 101 может составлять от нескольких миллиметров до нескольких сантиметров. Кроме того, датчик 100 положения содержит поверхность 106, которая при работе датчика 100 положения обращена к системе катушек датчика, что более подробно описано ниже, при этом часть поверхности 106, в зависимости от выполнения соответствующей системы катушек датчика, расположена в «области считывания» катушки. В представленном варианте выполнения дорожка 102 выполнена в форме выступа над поверхностью 106, который изменяется по ширине вдоль направления 104 движения, так что образуются различные значения ширины 102a, 102b, и по меньшей мере на протяжении отдельных участков имеет место однозначное соответствие между шириной 102a, 102b дорожки 102 и расстоянием вдоль направления 104 движения, то есть, в данном случае, углом поворота. Различные значения ширины 102a, 102b, которые может иметь дорожка 102, зависят от боковой области захвата системы катушек датчика, при этом обычно в качестве минимальной ширины могут применяться значения в размере 1 мм или менее, а для максимальной ширины - значения в размере нескольких миллиметров или существенно больше, например, несколько сантиметров. Кроме того, форма дорожки 102 не ограничена определенной конфигурацией, если только, по меньшей мере в пределах определенных участков, имеет место однозначное соответствие между формой или модуляцией параметров вихревых токов и положением в направлении движения, или же, в продольном направлении 104. Например, показана непрерывная синусоидальная форма, причем возможны также и другие формы, например, треугольная конфигурация или тому подобное. Кроме того, датчик 100 положения содержит покрытие 103, по меньшей мере на сигнальной поверхности дорожки 102, параллельной поверхности 106, которое обеспечивает электрическую проводимость дорожки 102, так что благодаря этому вдоль направления 104 движения в соответствии с шириной 102а, 102b также варьируется эффективное количество или же поверхность проводящего материала, который имеется в распоряжении для выработки вихревых токов при считыванияя посредством системы катушек датчика. При этом покрытие 103 выполнено в форме произвольного проводящего материала, например, металла, сплава металлов, проводящего полупроводника, проводящей пластмассы и тому подобного.
На фиг.1b схематически показан вид сверху датчика 100 положения согласно следующему варианту выполнения, в котором датчик положения выполнен для регистрации положения вдоль прямолинейного направления 104 движения. В этом случае основной элемент 101 выполнен, например, в виде прямоугольного материального элемента, который таким образом определяет поверхность 106, на которой, в свою очередь, выполнена дорожка 102. В отношении выбора полимерного материала для основного элемента 101 и дорожки 102, а также в отношении покрытия 103, имеют силу те же критерии, которые указаны выше для датчика 100 положения ротора согласно фиг.1a.
На фиг 1 с схематически показан вид в поперечном сечении датчика 100 положения ротора согласно фиг.1a, в соответствии с линией 1 с сечения. Как показано, датчик 100 положения содержит основной элемент 101 с поверхностью 106 и выполненной на ней дорожкой 102. Кроме того, в показанном варианте выполнения покрытие 103 нанесено лишь на поверхность дорожки 102, параллельной поверхности 106. В других вариантах выполнения покрытие 103 может иметь произвольную степень покрытия поверхности 106 и основного элемента 101, как это более подробно поясняется ниже.
Датчик 100 положения может быть изготовлен эффективным способом посредством того, что вначале изготавливают основной элемент 101 с дорожкой 102, что может осуществляться, например, посредством способа литья под давлением на основании надлежащих шаблонов. В других случаях дорожка 102 может также изготавливаться путем фрезерования основного элемента 101. В других вариантах выполнения дорожка 102, если она выполнена в виде непрерывной дорожки, может быть изготовлена в отдельном производственном процессе, например, посредством того, что соответствующий полимерный материал заливают специальным образом, или другим путем. После этого посредством термической обработки или другим способом в основном элементе 101 может быть размещена дорожка 102. Таким способом может быть достигнуто надежное и обладающее возможностью воспроизведения формообразование основного элемента 101, включая дорожку 102, так что параметры функционирования, то есть выработка вихревых токов в зависимости от положения, установлены по существу посредством конструктивных мероприятий, при этом непосредственно могут быть приняты во внимание как гибкость при выборе материалов для основного элемента 101 и дорожки 102, так и многочисленные варианты реализации при формообразовании. В других вариантах выполнения дорожка может быть изготовлена из одиночных отделенных друг от друга участков, которые изготавливают совместно с основным элементом 101, или же в виде отдельных деталей, которые затем закрепляют на основном элементе 101.
В некоторых вариантах выполнения покрытие 103 может быть изготовлено посредством того, что, например, соответствующий материал наносят при помощи способа нанесения покрытий, например, посредством напыления, гальванизации, химического осаждения из паровой фазы, физического осаждения из паровой фазы и тому подобного. При этом покрытие может осуществляться локальным образом, так что, как показано на фиг.1c, покрытие 103 нанесено лишь на сигнальной поверхности, то есть, на поверхности дорожки 102, параллельной поверхности 106, в то время как при других способах нанесения покрытий происходит нанесение покрытия 103 по большей поверхности, или же, часть покрытия затем снова селективно удаляют. В некоторых вариантах выполнения покрытие 103 может содержать металл, например, медь, алюминий или соответствующие сплавы, так что может образоваться желаемая высокая поверхностная проводимость покрытия 103. В других случаях проводящий материал может быть предусмотрен в покрытии 103 в форме легированного полупроводникового материала, проводящего полимерного материала и тому подобного.
На фиг.1d схематически показан датчик 100 положения согласно следующему варианту выполнения, в котором покрытие 103 покрывает по меньшей мере поверхность 106 и, при необходимости, также и следующие поверхности основного элемента 101. При необходимости покрытие 103 может также покрывать основной элемент 101 почти полностью, при этом выходящее за пределы дорожки 103 покрытие основного элемента 101 оказывает малое влияние на параметры сигнала, так как вследствие выступания дорожки 102 образовано большое расстояние между собственно сигнальной поверхностью 103a и другими пониженными областями 103b поверхности, так что отчетливая модуляция параметров вихревых токов достигается лишь посредством варьирующейся ширины сигнальной поверхности 103a. Это означает, что в левой части фиг.1d сигнальная поверхность 103a, благодаря своему большему боковому расширению приводит к более сильной выработке вихревых токов, по сравнению с тем местом дорожки 102, которое показано в правой части датчика 100 положения, при одинаковом расстоянии от системы катушек датчика, так как там обладающая очень большой поверхностью пониженная область ЮЗЬ производит намного меньшее влияние на систему катушек датчика, так что в общей сложности меньшая сигнальная поверхность 103a на правой стороне приводит к соответственно меньшим вихревым токам.
На фиг.1e схематически показан вид в поперечном сечении датчика 100 положения в радиальном варианте выполнения, то есть, в таком варианте выполнения, в котором поверхность 106 расположена по существу параллельно оси 107 вращения датчика 100 положения, в то время как в «осевых» вариантах выполнения, которые показаны на фиг.1a, 1c и 1d, она ориентирована по существу перпендикулярно оси 107 вращения. Таким образом, как показано, поверхность 106 основного элемента 101 выполнена по существу в виде цилиндрической поверхности, на которой предусмотрена дорожка 102 с желаемой шириной, изменяющейся в направлении движения. Для этого варианта выполнения также возникают упомянутые выше преимущества в отношении изготовления и выбора материала для основного элемента 106, дорожки 102 и покрытия 103.
На фиг.1f схематически показан вид сверху части поверхности 106 с выполненной на ней дорожкой 102 и покрытием 103.
На фиг.1g схематически показан датчик 100 положения согласно следующему варианту выполнения, в котором дорожка 102 выполнена на поверхности 106 в форме углубления, так что образуются по существу обратные параметры по сравнению, например, с фиг.1d. Это означает, что в варианте выполнения, показанном на фиг.1g, в положении на левой стороне следует ожидать относительно больших вихревых токов при воздействии системы катушек датчика, в то время как на правой стороне вследствие большего бокового размера дорожки, или же углубления 102, образуется существенно меньшее количество вихревых токов, так как проводящие поверхности 103a, 103b выполнены на достаточно большом расстоянии, например, в размере нескольких миллиметров. В отношении изготовления основного элемента 101 и дорожки 102 действуют те же самые критерии, которые указаны выше. Это означает, что дорожка 102 в форме варьирующегося в боковом направлении углубления может быть образована при помощи произвольного подходящего способа, например, способа литья под давлением, фрезерования и т.д.
На фиг.1h схематически показан датчик 100 положения согласно следующим вариантам выполнения, в которых покрытие 103 содержит по меньшей мере один первый частичный слой 113 и один второй частичный слой 123, причем при необходимости могут быть также выполнены дополнительные слои. В одном варианте выполнения частичный слой 113 выполнен в виде проводящего материала, который, например, в показанном варианте выполнения нанесен по всей площади, по меньшей мере на поверхности 106. В показанном варианте частичный слой 123 является самым наружным слоем покрытия 103 и может служить при этом в качестве соответствующего защитного слоя для пассивирования проводящего слоя 113. Например, слой 123 может быть выполнен в виде произвольного подходящего диэлектрического материала, чтобы таким образом придать проводящему материалу в слое 113 определенные желаемые свойства, например, в отношении химической стойкости и тому подобного. Например, слой 123 может быть выполнен в форме синтетического материала, например, полимерного материала, или также в виде неорганического покрытия, например, в форме двуокиси кремния, окиси алюминия, стекла, пластмасс, полимерных материалов, в зависимости от желаемых свойств поверхности и тому подобного. В этом случае покрытие 123 выполнено с достаточной толщиной, чтобы с одной стороны, реализовать желаемое защитное действие, а с другой стороны, не увеличить излишним образом эффективное расстояние между системой катушек датчика и электрически активной поверхностью 103a. Так например, могут быть предусмотрены соответствующие материалы покрытия с почти произвольной толщиной слоя, от нескольких микрон, до нескольких десятков или сотен микрон, или, при необходимости, еще толще. Частичный слой 113, содержащий проводящий материал, также может быть выполнен с относительно малой толщиной, так как, например, его механическая целостность может быть сохранена при помощи расположенного на нем слоя 123. Таким образом возможно достижение желаемых электрических параметров при малом расходе проводящего материала, причем несмотря на это обеспечены желаемые свойства поверхности датчика 100 положения. При необходимости слои 113 и 123 могут иметь различные степени покрытия основного элемента 101, чтобы при определенных обстоятельствах улучшить параметры функционирования или сэкономить затраты на материал. Например, проводящий материал слоя 113 может быть предусмотрен лишь на определенных областях, например, на сигнальной поверхности 103a или, при необходимости, на поверхности 106, в то время как слой 123 при необходимости может быть выполнен на протяжении почти всего основного элемента 101, чтобы достигнуть таким образом желаемого защитного действия.
В других вариантах выполнения слоем 123 является проводящий материал, в то время как слой 113 служит в качестве адгезионного слоя, который имеет хорошую адгезию как к материалу основного элемента 101, так и к расположенному над ним слою. При этом слоем 113 может быть проводящий материал или же изолирующий материал.
На фиг.1i схематически показан вид сверху датчика 100 положения согласно следующему варианту выполнения, в котором на поверхности 106 выполнена дорожка 102 с почти постоянной шириной. Модуляция параметров вихревых токов, требующаяся для функционирования датчика 100 положения, достигается в этом варианте выполнения посредством «модуляции по высоте» дорожки 102 вдоль направления движения.
На фиг.1j схематически показано изображение в поперечном сечении вдоль линии 1j сечения на фиг.1i, при этом показаны положение для выработки больших вихревых токов (левая сторона) и положение для выработки малых вихревых токов (правая сторона). Это означает, что дорожка 102 имеет высоту 102h, которая варьируется вдоль направления движения, так что расстояние покрытия 103 от системы катушек датчика также варьируется, и таким образом, в зависимости от положения модулируются параметры вихревых токов. В этом варианте выполнения покрытие 103, содержащее проводящий материал, может быть эффективным образом нанесено посредством произвольного упомянутого выше способа, в то время как в других вариантах выполнения может также осуществляться эффективное покрытие при помощи пленочного материала, так как, в частности, относительно постоянная ширина дорожки 102 дает возможность нанесения при помощи валка и тому подобного.
В следующем примерном варианте выполнения модуляция по высоте дорожки 102, показанная на фиг.1i и 1j, может также эффективно комбинироваться с соответствующим варьированием ширины, как это описано для предшествующих вариантов выполнения, так что образуется очень эффективная и сильная модуляция параметров вихревых токов в зависимости от положения вдоль направления 104 движения, поскольку варьируются как высота, и таким образом, расстояние, так и боковой размер проводящего материала покрытия 103. Таким образом образуется большая интенсивность изменения ответной реакции вихревых токов при изменении положения в направлении движения, так что соседние места вырабатывают отчетливо различимый сигнал.
На фиг.1k схематически показана конструкция датчика 100 положения согласно осевому варианту выполнения, который показан, например, на фиг.1a, при этом датчик 100 положения размещен на ротационной машине 170, например, на электрической машине. Это означает, что датчик 100 положения механически соединен с ротором 180 машины 170, так что он вращается вокруг оси 107 вращения. Кроме того, система 150 катушек датчика неподвижно закреплена на расстоянии от дорожки 102 в осевом направлении, так что вызывается переменное взаимодействие между дорожкой 102, то есть, нанесенным покрытием 103, и одной или несколькими катушками в системе 150, при этом вследствие зависящего от положения демпфирования одной или нескольких катушек в системе 150 в распоряжении имеется соответствующий сигнал для блока 160 обработки.
На фиг.11 схематически показан датчик 100 положения согласно радиальному варианту выполнения, который, например, показан на фиг.1e, при этом дорожка 102 подвергается считыванию перпендикулярно оси 107 вращения посредством системы 150 катушек датчика.
На фиг.1m схематически показан вид сверху датчика 100 положения с соответствующей системой 150 катушек датчика при осевом варианте конструкции, то есть, когда ось 107 вращения ориентирована по существу перпендикулярно поверхности 106.
На фиг.1n схематически показан датчик 100 положения согласно следующим вариантам выполнения, в которых выполнена по меньшей мере одна дополнительная дорожка 102n, параметры вихревых токов которой изменяются в зависимости от положения вдоль направления движения. Таким способом можно определить большее количество информации о положении, например, посредством того, что дорожки 102, 102n отображают различные диапазоны измерения длины. Например, в показанном варианте выполнения дорожка 102 содержит несколько периодически повторяющихся участков 112a-112b, которые для системы катушек датчика представляются в виде идентичных узлов, и которые однако благодаря большой пространственной модуляции в пределах каждого участка 112a, 112b обеспечивают возможность желаемой высокой разрешающей способности в отношении местоположения. С другой стороны, дорожка 102n обладает меньшей разрешающей способностью в отношении местоположения, то есть, изменение параметров вихревых токов вдоль направления 104 движения проявляется в меньшей степени, однако образуется больший измерительный участок, то есть, в показанном варианте выполнения, больший угловой диапазон, который при необходимости может охватывать полный оборот в размере 360 градусов. Дорожка 102n может быть изготовлена таким же образом, что и дорожка 102, так что в этом случае также может быть достигнута высокая степень возможности воспроизведения и точности. В частности, путем конструктивного выполнения дорожек 102, 102n может быть реализовано небольшое пространственное расстояние между дорожками, так что может быть достигнута высокая «плотность информации» при заданных размерах поверхности 106, или же основного элемента 101.
Следует обратить внимание на то, что соответствующее выполнение с несколькими дорожками 102, 102n может быть также предусмотрено в радиальном варианте выполнения, или может быть реализован смешанный вариант выполнения, в котором одна или несколько дорожек выполнены в виде осевых дорожек, как это показано на фиг.1n, в то время как одна или несколько дорожек могут быть выполнены в виде радиальных дорожек, как это, например, показано на фиг.1i и описано для отдельной дорожки.
Далее со ссылками на фиг.2a-2d описаны следующие примерные варианты выполнения, в которых достигнуто эффективное структурирование параметров вихревых токов в основном элементе датчика положения, причем в примерных вариантах выполнения он изготовлен по существу из непроводящего материала основания, который окружает проводящий материал.
На фиг.2a схематически показано поперечное сечение датчика 200 положения, который в показанном варианте выполнен в виде осевого датчика положения ротора. Датчик 200 положения содержит основной элемент 201, который в показанном варианте выполнения преимущественной частью изготовлен из непроводящего материала, например, пластмассы, в котором проводящий материал 203 локально помещен таким образом, что посредством этого образована дорожка 202, которая приводит к желаемым параметрам вихревых токов в зависимости от положения, как это описано выше. Кроме того, в показанном варианте выполнения образована поверхность 206, которая покрывает проводящий материал 203, по меньшей мере над дорожкой 202. В показанном варианте выполнения проводящий материал 203 выполнен, например, в форме профилированного материального элемента, в частности, содержащего металл, который в некоторых примерных вариантах выполнения обладает умеренно высокой собственной стабильностью, так что благодаря наличию проводящего материала 203 может быть также достигнуто улучшение механической стабильности элемента 201, даже если он выполнен с умеренно малой толщиной. Например, может быть предусмотрен проводящий материал 203 в форме металлического листа, который подвергнут профилированию соответствующим способом, например, путем штамповки, а затем надлежащим образом помещен в материал основного элемента 201. Для этого, например, проводящий материал 203 в форме, обладающей собственной стабильностью, может подвергаться облицовке экструзией, причем при необходимости проводящий материал 203 может быть полностью облицован полимерным материалом. Это означает, что в данном случае образуется непрофилированная поверхность 206, которая при определенных обстоятельствах упрощает монтаж датчика 200 положения и обращение с ним, и кроме того, обеспечивает соответствующую защиту проводящего материала 203. С другой стороны, желаемая модуляция параметров вихревых токов достигается эффективным и обладающим возможностью воспроизведения способом посредством профилирования материала 203. При этом толщина материала для поверхности 206 над проводящим материалом 203 может быть надлежащим образом установлена настолько малой, чтобы могло быть достигнуто желаемое защитное действие, и тем не менее, сохранялось малое значение соответствующего «воздушного зазора» по отношению к системе катушек датчика. Следует обратить внимание на то, что в примерных вариантах выполнения непроводящий материал основного элемента 201 в форме поверхности 202 не обязательно покрывает весь проводящий материал 203, а служит лишь для достижения по существу плоской поверхности, при этом выступающие области проводящего материала 203 образуют часть поверхности 202. Далее, следует обратить внимание на то, что дорожка 202 также может быть образована посредством «выступающих» областей внутри основного элемента.
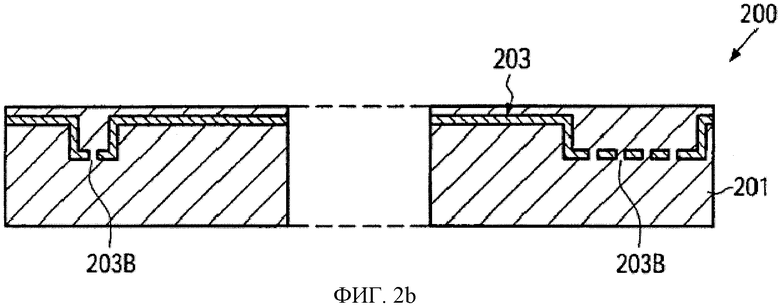
На фиг.2b схематически показан датчик 200 положения в следующем варианте выполнения, в котором в пониженных областях проводящего материала 203 предусмотрены соответствующие отверстия 203b, так что, например, при облицовке экструзией проводящего материала 203 может образоваться эффективное «зубчатое зацепление» полимерного материала с проводящим материалом 203, без существенного влияния на параметры вихревых токов, так как пониженные области и так уже незначительно влияют на параметры вихревых токов. Таким способом пространственное расположение дорожки 202 может эффективным образом сохраняться при помощи профилированного материала, причем благодаря отверстиям 203b тем не менее достигается высокая стабильность основного элемента 201.
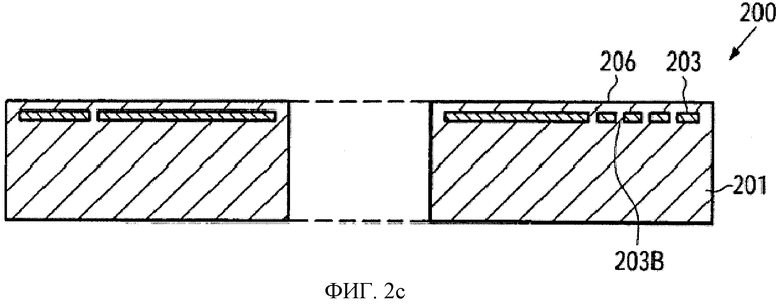
На фиг.2с схематически показано изображение в поперечном сечении датчика 200 положения согласно следующему примерному варианту выполнения, в котором предусмотрено по существу «двухмерное» или плоское расположение проводящего материала 203 в основном элементе 201, при этом соответствующее структурирование или модуляция параметров вихревых токов достигается посредством соответствующих выемок или отверстий 203b. Например, в одном варианте выполнения проводящий материал 203 выполнен в форме проводящего материального элемента, который предпочтительным образом обладает собственной стабильностью, при этом отверстия 203b выполнены вдоль направления движения таким образом, что благодаря этому эффективным образом в зависимости от положения варьируется количество эффективно действующего проводящего материала. Например, на левой стороне фиг.2с вследствие меньшего количества отверстий 203b образуется высокая степень заполнения проводящим материалом 203, и тем самым, соответственно большая выработка вихревых токов, в то время как на правой стороне фиг.2 с существенно меньшая степень заполнения проводящим материалом 203 приводит к существенно меньшей выработке вихревых токов.
Датчик 200 положения согласно фиг.2 с может быть изготовлен с помощью произвольных подходящих способов, например, посредством облицовки экструзией проводящего материала 203, при этом отверстия 203b снова приводят к эффективному зубчатому зацеплению непроводящего материала основного элемента 201, который составляет значительную часть, с проводящим материалом 203. Таким способом могут быть изготовлены очень стабильные датчики положения, которые пригодны даже для очень высокой частоты вращения.
На фиг.2d схематически показан вид сверху проводящего материала 203, который, например, может применяться в варианте выполнения согласно фиг.2c, при этом отверстия 203b обеспечивают ответную реакцию вихревых токов, зависящую от положения вдоль направления движения.
В следующих вариантах выполнения предусмотрена радиальная конструкция, в которой проводящий материал 203 выполнен на торцевой стороне основного элемента 201, однако при этом образуется поверхность без ярко выраженной топологии, аналогично поверхности 206. Если проводящий материал 203 служит также для повышения стабильности основного элемента, то в радиальном варианте выполнения он также может проходить соответствующим образом по большей области основного элемента, аналогично тому, как это показано на фиг.2a-2c, однако при этом, не требуется модуляция для образования дорожки, за исключением края, который в радиальном варианте выполнения подвергается считыванию посредством катушки датчика. В следующих вариантах выполнения может также применяться комбинация радиального и осевого вариантов, если требуется более одной дорожки. В других вариантах выполнения может быть выполнено несколько дорожек только в осевом или только в радиальном вариантах выполнения.
Таким образом, в настоящем изобретении предложены датчики положения, в которых основной элемент выполнен по существу из непроводящего материала, в частности, из полимерного материала, при этом выработка вихревых токов в зависимости от положения может быть достигнута очень эффективным и обладающим возможностью воспроизведения способом посредством того, что в некоторых вариантах выполнения на поверхности основного элемента при помощи выступов и/или выемок образована надлежащая дорожка, на которую затем может быть нанесено соответствующее покрытие, или, в других примерных вариантах выполнения, осуществляется надлежащее профилирование электрически проводящего материала внутри основного элемента, изготовленного в основном из пластмассы. Конструкция основного элемента и принадлежащей к нему дорожки обеспечивает возможность выполнения датчика положения с почти произвольными надлежащими размерами, согласно соответствующему применению, то есть, длина или же диаметр могут быть эффективным образом согласованы с размерами движущейся детали или с ее формой, причем изготовление может быть реализовано с малыми затратами и, в то же время, с небольшими производственными допусками.
Предложен датчик положения для создания зависящих от положения потерь на вихревые токи в системе катушек датчика. Датчик положения ротора содержит основной элемент, на поверхности которого, существенной в отношении анализа сигнала, выполнена дорожка, которая снабжена проводящим покрытием. Благодаря выполнению дорожки в основном элементе посредством конструктивных мероприятий достигается желаемая модуляция параметров вихревых токов в зависимости от положения. Техническим результатом является уменьшение производственных допусков. 19 з.п. ф-лы, 18 ил.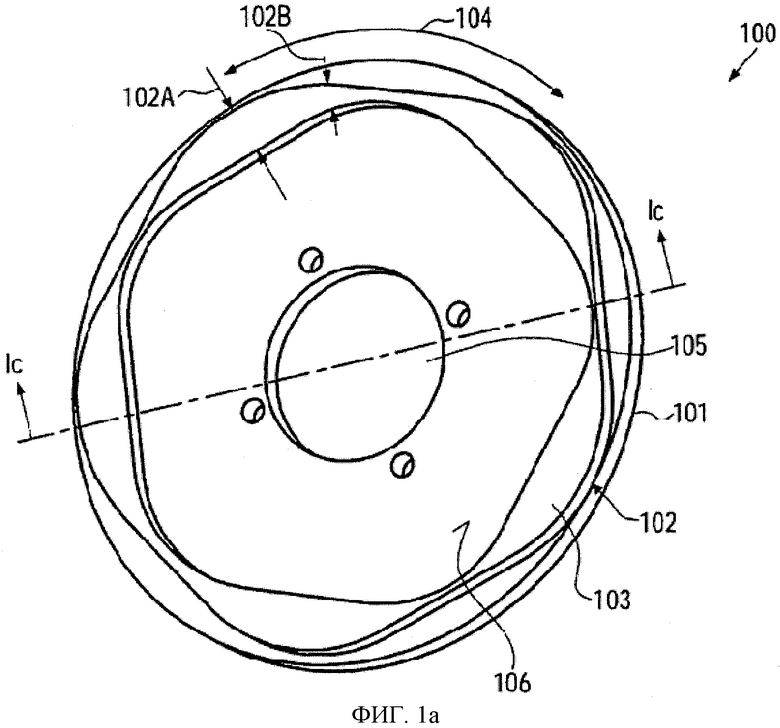
1. Датчик положения для создания зависящих от положения потерь на вихревые токи в системе катушек датчика, содержащий основной элемент из пластмассы, поверхность которого при работе ориентирована в направлении системы катушек датчика, дорожку, которая сформирована в основном элементе посредством выступов на поверхности пластмассы, которая проходит вдоль заданного направления движения и которая варьируется по меньшей мере в одном направлении, перпендикулярном заданному направлению движения, и покрытие, нанесенное по меньшей мере на дорожку и содержащее проводящий материал.
2. Датчик положения по п.1, в котором высота дорожки является постоянной вдоль заданного направления движения, а ширина дорожки варьируется вдоль этого направления.
3. Датчик положения по п.1, в котором высота дорожки варьируется вдоль заданного направления движения.
4. Датчик положения по п.3, в котором ширина дорожки варьируется вдоль заданного направления движения.
5. Датчик положения по п.1, в котором заданным направлением движения является вращательное движение.
6. Датчик положения по п.5, в котором основной элемент выполнен с возможностью закрепления на роторе ротационной машины или на соединенном с ним элементе.
7. Датчик положения по п.6, в котором поверхность ориентирована перпендикулярно оси вращения ротора.
8. Датчик положения по п.6, в котором поверхность ориентирована параллельно оси вращения ротора.
9. Датчик положения по п.1, в котором на поверхности, по меньшей мере частично, нанесено покрытие.
10. Датчик положения по п.9, в котором покрытие нанесено по меньшей мере на одной следующей поверхности основного элемента.
11. Датчик положения по п.1, в котором покрытие содержит металл.
12. Датчик положения по п.11, в котором покрытие выполнено в виде металлического слоя.
13. Датчик положения по п.11, в котором покрытие содержит первый частичный слой и сформированный на нем второй частичный слой, при этом первый и/или второй частичный слой выполнены в качестве проводящего слоя.
14. Датчик положения по п.13, в котором второй частичный слой является самым наружным частичным слоем покрытия и выполнен в качестве проводящего слоя.
15. Датчик положения по п.13, в котором второй частичный слой является самым наружным частичным слоем покрытия и выполнен в качестве защитного слоя для расположенного под ним первого частичного слоя, который выполнен в качестве проводящего слоя.
16. Датчик положения по п.1, в котором покрытие содержит проводящий полупроводниковый материал.
17. Датчик положения по п.1, в котором дорожка в заданном направлении движения выполнена в виде непрерывной дорожки.
18. Датчик положения по любому из пп.1-17, в котором дорожка в заданном направлении движения содержит периодические в пространстве участки.
19. Датчик положения по п.17, в котором основной элемент содержит выполненную из пластмассы посредством углублений и/или выступов на поверхности дополнительную дорожку, которая проходит вдоль заданного направления движения и варьируется по меньшей мере в одном направлении, перпендикулярном заданному направлению движения.
20. Датчик положения по п.18, в котором дорожка и дополнительная дорожка варьируются вдоль направления движения различным образом.
| DE 10320941 В4, 01.06.2006 | |||
| Устройство для сброса поверхностного слоя воды из отстойника | 1991 |
|
SU1801545A1 |
| DE 10231980 A1, 19.02.2004 | |||
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |

