Изобретение относится к гидроакустике и может быть использовано наблюдателем для оценки степени угрозы со стороны торпеды.
Оценка степени угрозы со стороны торпеды осуществляется гидроакустической станцией наблюдателя в пассивном режиме по принимаемым зондирующим сигналам активной системы самонаведения (ССН) торпеды. Угроза наблюдателю со стороны торпеды наступает с момента, когда ССН торпеды его обнаружила.
Традиционно системы пассивного обнаружения сигналов работающих гидролокаторов решают задачу обнаружения факта работы ССН торпеды, определяют параметры зондирующих сигналов и направление на торпеду. Выбор порога обнаружения зондирующего сигнала осуществляется исходя из необходимости принятия бинарного решения «сигнал есть» или «сигнала нет» [1].
Известны способы пассивного определения параметров морского объекта, в том числе и торпеды, по его зондирующим сигналам, реализуемые гидроакустическими комплексами (ГАК) и станциями (ГАС), например «Гидроакустический комплекс МГК-400ЭМ» [2]. Реализованный в данном гидроакустическом комплексе способ определения параметров торпеды по ее зондирующим сигналам обеспечивает определение типа торпеды, параметров ее ССН и направление на торпеду. Оператору режима обнаружения гидроакустических сигналов выводятся данные о частоте и длительности зондирующего сигнала, периода следования сигналов, уровне сигнала и направление на торпеду. Недостатком реализованного способа обработки информации является невозможность наблюдателю принять объективное решение - обнаружен ли он системой самонаведения торпеды и, тем самым, своевременно принять мер защиты, например применить средства радиоэлектронной борьбы (РЭБ), применить оружие самообороны, выполнить активное маневрирование для уклонения.
Известен также способ пассивного определения параметров торпеды гидроакустической станцией анализа и классификации сигналов по зондирующим сигналам системы самонаведения торпеды (ССН), реализованный в гидроакустической станции AN/WLY-1[3]. Реализованный в данной ГАС способ определения параметров торпеды предусматривает формирование многолучевой характеристики направленности, обработку информации в вычислителе в автоматическом режиме, обеспечивает обнаружение, классификацию торпед, определение их координат, приведение в боевое состояние наблюдателя и систем его самообороны. AN/WLY-1 контролирует пространство вокруг наблюдателя на все 360° с помощью приемных антенных устройств ГАС. Вычислитель гидроакустической системы AN/WLY-1 способен:
- оповещать наблюдателя о приближении торпеды;
- управлять постановкой приборов РЭБ для подавления ССН торпед;
- управлять пуском оружия самообороны;
- определять параметры движения торпеды и прогнозировать эффективность противоторпедной защиты наблюдателя;
Недостатком данной ГАС является невозможность наблюдателю своевременно установить факт обнаружения его торпедой, и тем самым, есть вероятность преждевременного применения наблюдателем средств РЭБ и оружия самообороны, то есть если ССН торпеды не обнаружила наблюдателя, а он в свою очередь преждевременно применил средства самообороны (РЭБ, оружие и другое), то тем самым обнаруживает себя и создает для противоположной стороны преимущества в тактическом плане. С другой стороны, если ССН торпеды обнаружила наблюдателя, а он в свою очередь задерживает применение средств самообороны, то наступают так же отрицательные последствия для самообороны, когда средства самообороны оказываются неэффективными.
Таким образом, обнаружение торпеды гидроакустической станцией AN/WLY-1 или другой ГАС, ГАК, еще не свидетельствует о том, что торпеда обнаружила наблюдателя и наводится на него.
Наблюдатель, обнаруживший своей пассивной ГАС сигналы ССН торпеды, стремится не допустить преждевременного обнаружения своего местонахождения какими либо своими действиями, так как возможности уклониться от торпеды весьма затруднительны из-за того, что скорость торпеды обычно больше скорости наблюдателя.
Наиболее близким по совокупности признаков к предлагаемому способу является способ пассивного определения параметров маневрирующего объекта [8,], который обеспечивает прием акустических сигналов шумоизлучения маневрирующего объекта, движущегося по траектории самонаведения, гидроакустической антенной, преобразование акустического сигнала в электрический, предварительное усиление и преобразование сигнала, автоматическое сопровождение маневрирующего объекта по углу, его классификацию и определение дистанции до объекта в вычислителе.
Торпеда является частным случаем реализации маневрирующего объекта, траектория которой определяется работой ее ССН, работающей в пассивном и активном режимах наведения [11]. Дальнейшее рассмотрение будет проводиться применительно к торпеде, снабженной активной системы самонаведения.
Недостатком приведенного способа - прототипа, как и приведенных выше аналогов, является невозможность, по результатам классификации и определения координат и параметров движения торпеды, определить момент обнаружения наблюдателя системой ее самонаведения, что не позволяет наблюдателю своевременно уклониться от объекта и своевременно приступить к защитным действиям. Преждевременные действия по защите могут демаскировать наблюдателя, а задержка привести к получению ущерба.
Задачей изобретения является разработка способа определения параметров торпеды, обеспечивающий своевременное предупреждение наблюдателя о его обнаружении системой самонаведения торпеды.
Техническим результатом от использования изобретения является определение важного параметра торпеды - момента обнаружения наблюдателя системой самонаведения торпеды, что обеспечивает повышение эффективности противоторпедной защиты наблюдателя.
Для решения поставленной задачи в способ определения параметров торпеды, движущейся по траектории самонаведения, включающий, прием акустических сигналов торпеды гидроакустической антенной, установленной на судне-наблюдателе, преобразование акустического сигнала в электрический, предварительное усиление и первичную обработку принятого сигнала, автоматическое сопровождение торпеды по углу, классификацию принятого сигнала и определение параметров движения торпеды в вычислителе введены новые признаки, а именно: осуществляют прием зондирующих сигналов излучения ССН торпеды, определяют частоту зондирующего сигнала, его длительность, период следования и уровень, по результатам классификации определяют параметры системы самонаведения торпеды - площадь излучающей антенны ССН, уровень акустических помех приему, определяют отражающую способность судна-наблюдателя, используя уравнение гидролокации применительно к ССН торпеды, определяют потери на распространение и пороговое значение уровня зондирующего сигнала Ррасч, осуществляют сравнение уровня текущего сигнала Pt с пороговым значением уровня зондирующего сигнала и момент выполнении условия Pt≥Ррасч определяют, как момент обнаружения торпедой наблюдателя.
Способ определения параметров торпеды основан на пассивном обнаружении гидроакустической станцией (ГАС) наблюдателя зондирующих сигналов ССН, определения класса торпеды и измерения параметров зондирующих сигналов - частоты F0, длительности τ0, периода следования импульсов Т, текущего значения уровня сигнала Pt и определения своей отражающей способности R(ψ0) как функции курсового угла на морской объект ψ0, определение вычислителем ГАС наблюдателя параметров ССН торпеды и расчет по этим данным значения порогового уровня сигнала ССН Ррасч, при котором происходит обнаружение наблюдателя системой самонаведения торпеды с заданной вероятностью и непрерывная проверка условия Pt≥Ррасч, при достижении которого срабатывает сигнал оповещения об обнаружении наблюдателя.
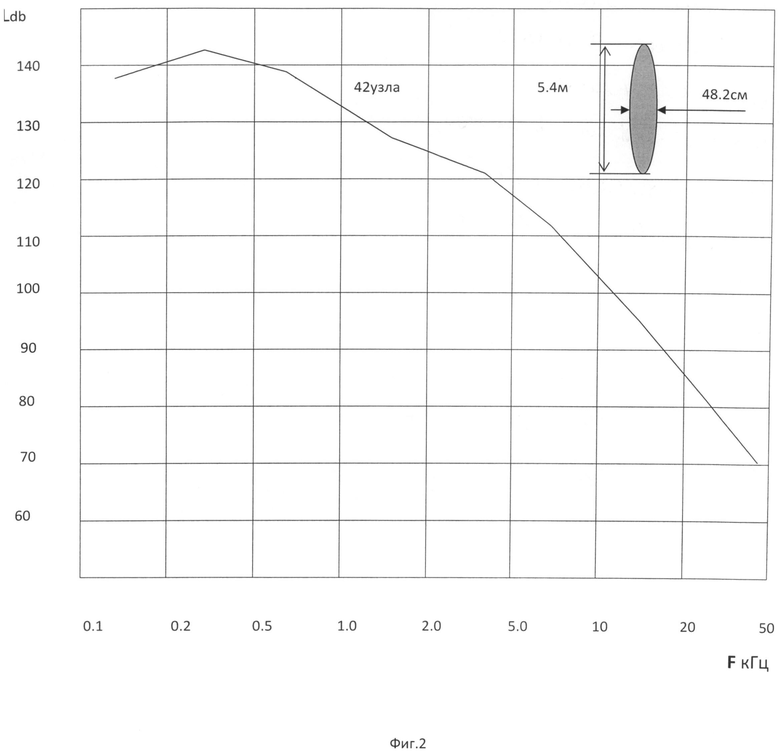
Сущность изобретения поясняется фиг.1, где представлено устройство, реализующее способ определения параметров торпеды и фиг.2, на которой приведена зависимость уровня шумов обтекания тела для различных частот, заимствованная из [6].
Предлагаемый способ реализуется устройством (фиг.1), включающим приемную гидроакустическую антенну 1, блок 2 предварительной и первичной обработки, блок 3 автоматического сопровождения цели измерения курсового угла на торпеду ψ0, блок 4 измерения параметров сигналов F0, τ, Т, Pt, блок 5 классификации определения класса торпеды и вычислитель 6.
Вычислитель 6 представляет собой аппаратно-программный блок цифрового вычислительного комплекса гидроакустической станции наблюдателя, соединенный с выходами блоков 3, 4 и 5. Реализация алгоритма в вычислителе осуществляется программным путем.
Блоки 2, 3, 4 и 5 известны из [8].
Предложенный способ реализуется следующим образом: смесь прямого зондирующего сигнала и помехи с выхода гидроакустической антенны 1 поступает на блок 2 предварительной и первичной обработки сигналов, выделяющую зондирующий сигнал, который поступает на блок 3 автоматического сопровождения цели по углу, который соединен с вычислителем 6 и блоком 4 измерения параметров сигнала по алгоритмам описанным, например, в [9]. Выход блока 4 соединен со входом блока классификации 5, который определяет класс торпеды (универсальная торпеда или малогабаритная) и выдает параметры этой ССН в вычислитель 6.
При классификации такой цели, как торпеда, можно считать, что диаметр торпеды определяет допустимый размер антенны. Так для универсальной торпеды диаметром 533 мм, имеющей соответствующую несущую частоту ССН, диаметр антенны, с допустимой величиной ошибки, составляет 500 мм и этот параметр используется для расчета площади антенны. Для малогабаритной торпеды диаметром 324 мм, с характерной для нее частотой зондирующего сигнала, диаметр антенны ССН составляет 300 мм и то же используется для расчета площади антенны.
Вычислитель 6 реализует алгоритм определения расчета порогового уровня сигнала и сравнение его с текущим уровнем в соответствии с алгоритмом, представленным на фиг.1. Из блока 3 автоматического сопровождения цели данные о курсовом угле ψ0 на объект поступают в вычислитель 6, где вычисляется собственная отражающая способность судна-наблюдателя (при аппроксимации корпуса корабля цилиндром), которая вычисляется по формуле [6] -

где: α - диаметр цилиндра;
L - длина цилиндра;
β = kLsinψ0;
λ - длина волны;
ψ0 - курсовой угол на торпеду;
В вычислитель 6 поступают данные о значениях F0, т, Т, Pt из блока 4, значения уровня помех Рннп приемному тракту ССН торпеды из блока 5, определяемые из фиг.2 [6] и площади излучающей антенны Sтор, размер которой определен классом торпеды (универсальная или малогабаритная), на основании которых по алгоритму, приведенному на фиг.1, определяют значение потерь на распространение по формуле [5], -
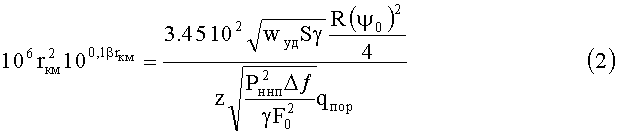
где: wуд - удельная мощность излучения, снимаемая с единицы поверхности антенны вт/см2 (на практике wуд=2 вт/см2);
r - расстояние между объектом и наблюдателем;
z - неучтенные потери при обработке (обычно принимают z=2);
Smop=πd2 - площадь поверхности излучающей антенны ССН торпеды, определяемая по принадлежности к определенному классу;
d - диаметр антенны;
γ - коэффициент концентрации антенны торпеды;

с - скорость звука в морской воде;
Δf=1/τ0 - полоса пропускания приемного тракта ГС морского объекта;
qпор - требуемое пороговое отношение сигнал помеха, при котором обеспечиваются заданные вероятности правильного обнаружения Рпо и ложной тревоги Рлт[5], равное -

где: М=mΘmтmв - число элементов разрешения приемного тракта ССН
mΘ=Θ/(2arcsin0.44λ/d) - число характеристик направленности в горизонтальной области [10];
Θ=300° предполагаемый сектор обзора ССН, соответствующий современным образцам зарубежных торпед;
mт=Т/τ0 - число элементов разрешения по дальности,
где: Т - период следования зондирующих сигналов ССН торпеды;
mв=3 - число характеристик направленности в вертикальной плоскости;
Это значение mв принимается как разумное допущение, т.к. изменение его в большую или меньшую сторону сказывается на параметре qпор незначительно.
Nлт=0.1 - вероятность ложной тревоги за цикл обнаружения;
Nпо=0.9 - вероятность правильного обнаружения;
Nлт, Nпо - принимаются равными прогнозным параметрам большинства поисковых ГС;
Затем вычисляют уровень излучаемого давления ССН торпеды по формуле [5]-

По вычисленным значениям потерь на распространение и значениям уровня излучения Р0 ССН торпеды определяют пороговые значения уровня сигнала:

которое затем сравнивается текущим значением уровня Pt и в случае, если выполняется условие Pt≥Ррасч определяется момент обнаружения наблюдателя торпедой.
Это позволяет считать, что заявленный технический результат достигнут и обеспечено повышение эффективности противоторпедной защиты.
Источники информации
1. И.М. Стрелков. Обобщенная модель обнаружения сигналов. Труды второй всесоюзной школы семинара по статистической гидроакустике. Новосибирск. 1971 г., с.172-191.
2. И.В. Соловьев, Г.Н. Корольков и др. Морская радиоэлектроника. СПб., 2003 г., С.96-99.
3. N. Friedman. World Naval Weapons Systems Update, US Naval Institute, Annapolis, 1998 г., с 62-68.
4. В.А. Зарайский, A.M. Тюрин. Теория гидролокации. Л., 1975 г. с.442.
5. Ю.С. Кобяков, Н.Н. Кудрявцев, В.И. Тимошенко. Конструирование гидроакустической рыбопоисковой аппаратуры. Л., 1986 г., с.69, 75, 76.
6. Р.Дж. Урик. Основы гидроакустики. Л., 1978 г., с.307, 378.
7. А.П. Евтютов, В.Б. Митько. Примеры инженерных расчетов в гидроакустике. Л., 1981 г., с.86.
8. Патент РФ №2196341 м.кл. G01S 3/80 01.11.2001 - Способ определения параметров движения маневрирующего объекта.
9. Я.Д. Ширман. Теоретические основы радиолокации. М., 1970 г., с.185-194.
10. А.П. Евтютов, В.Б. Митько. Примеры инженерных расчетов в гидроакустике. Л., 1981 г., с.14-22.
11. В.А. Хвощ. Тактика подводных лодок. М., 1989 г., с.124-125.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ СУДОВ | 2015 |
|
RU2584355C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2770388C1 |
| Система противоторпедной защиты гидроакустического комплекса подводной лодки | 2016 |
|
RU2661066C1 |
| Способ определения траектории маневрирования носителя источника зондирующих сигналов для его классификации | 2023 |
|
RU2815275C1 |
| ПОДВОДНЫЙ АППАРАТ-ОХОТНИК | 2017 |
|
RU2654435C1 |
| ПОДВОДНЫЙ АППАРАТ КОМПЛЕКСНЫЙ | 2016 |
|
RU2640598C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ И СУДНА ОТ ПОРАЖЕНИЯ ТОРПЕДОЙ | 2019 |
|
RU2733732C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2759498C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ ОТ ТОРПЕДЫ | 2020 |
|
RU2746085C1 |
Использование: изобретение относится к гидроакустике и может быть использовано в способе определения параметров торпеды. Сущность: в способе определения параметров торпеды, движущейся по траектории самонаведения, включающем прием акустических сигналов торпеды гидроакустической антенной, установленной на судне-наблюдателе, преобразование акустического сигнала в электрический, предварительное усиление и первичную обработку принятого сигнала, автоматическое сопровождение торпеды по углу, классификацию принятого сигнала и определение параметров движения торпеды в вычислителе, дополнительно осуществляют прием зондирующих сигналов излучения системы самонаведения (ССН) торпеды, определяют частоту зондирующего сигнала, его длительность, период следования и уровень, по результатам классификации определяют параметры ССН торпеды - площадь антенны, уровень акустических помех приему, определяют отражающую способность судна-наблюдателя, используя уравнение гидролокации применительно к ССН торпеды определяют потери на распространение и пороговое значение уровня зондирующего сигнала Pрасч, осуществляют сравнение уровня текущего сигнала Pt с уровнем порогового сигнала Pрасч и момент выполнении условия Pt≥Pрасч определяют как момент обнаружения торпедой наблюдателя. Технический результат: определение момента обнаружения наблюдателя системой самонаведения торпеды, что обеспечивает повышение эффективности противоторпедной защиты наблюдателя. 2 ил.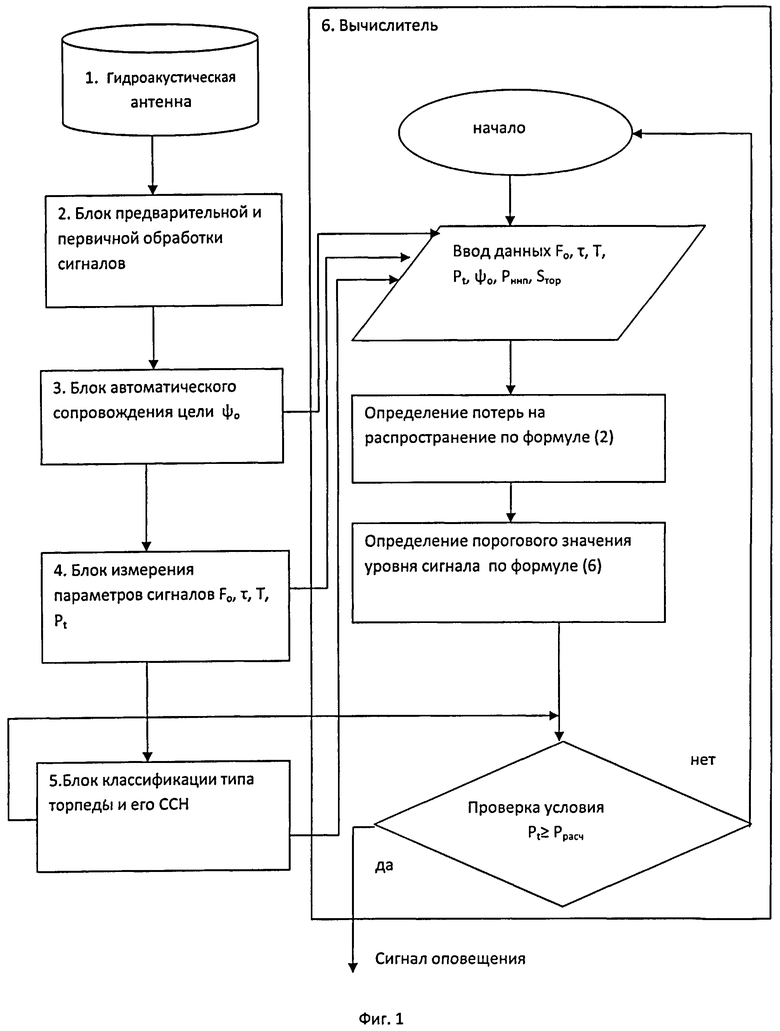
Способ определения параметров торпеды, движущейся по траектории самонаведения, включающий прием акустических сигналов торпеды гидроакустической антенной, установленной на судне-наблюдателе, преобразование акустического сигнала в электрический, предварительное усиление и первичную обработку принятого сигнала, автоматическое сопровождение торпеды по углу, классификацию принятого сигнала и определение параметров движения торпеды в вычислителе, отличающийся тем, что осуществляют прием зондирующих сигналов излучения системы самонаведения (ССН) торпеды, определяют частоту зондирующего сигнала, его длительность, период следования и уровень, по результатам классификации определяют параметры торпеды - площадь излучающей антенны ССН, уровень акустических помех приему, определяют отражающую способность судна-наблюдателя, используя уравнение гидролокации применительно к ССН торпеды, определяют потери на распространение и пороговое значение уровня зондирующего сигнала Pрасч, осуществляют сравнение уровня текущего сигнала Pt с уровнем порогового сигнала Pрасч и момент выполнения условия Pt≥Ppacч определяют как момент обнаружения торпедой наблюдателя.
| СПОСОБ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ ОТ ШИРОКОПОЛОСНОЙ МИНЫ-ТОРПЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2214942C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ИОНООБМЕННОЙ ДВУХСЛОЙНОЙ МЕМБРАНЫ | 2018 |
|
RU2670300C1 |
| NL 8401056 A, 03.04.1989 | |||
| DE 3504050 A1, 31.03.2011 | |||
| EP 1531339 A2, 18.05.2005. | |||

