Изобретение относится к области гидроакустики, и может быть использовано в задачах определения класса объекта при разработке гидроакустических систем.
Задача обеспечения противоторпедной защиты (ПТЗ) кораблей рассматривается в качестве одного из основных направлений повышения их боевой устойчивости. В гидроакустическом аспекте проблемный характер задачи обеспечения ПТЗ кораблей определяется такими факторами, как:
- сложная динамика движения торпеды, существенно нелинейная траектория движения на разных этапах движения;
- необходимость решать задачу обнаружения торпеды на дальности, достаточной для выработки данных целеуказания противоторпедному оружию и уничтожения торпеды на безопасной для корабля дистанции.
В то же время существуют предпосылки, способствующие обнаружению торпеды, а именно высокая акустическая шумность торпеды и наличие характерных дискретных составляющих в спектре ее шумоизлучения. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», Санкт-Петербург: Наука, 2004 г., стр. 40-41).
В системах, использующих методы классификации по анализу шумоизлучения морских объектов, используют признаки, основанные на особенностях спектрального состава сигнала, так называемого портрета. (В.С. Бурдик «Анализ гидроакустических систем», Лен. Судостроение, 1988 г., стр. 322).
Известен способ обнаружения и классификации, описанный в работе В.В. Деева и др. «Анализ информации оператором-гидроакустиком» (Лен. Судостроение, 1990 г., стр. 110-111).
Способ содержит следующие операции:
- прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой;
- выделение параметров сигнала шумоизлучения объекта из аддитивной смеси сигнала и помехи S(t)=A(t)+Y(t), где A(t) - мощность сигнала объекта, a Y(t) - мощность помехи (мешающий сигнал);
- деление исходной реализации сигнала S(t) на r отрезков длительности Т;
- вычисление спектра S(ωк) по каждому такому отрезку, т.е. дискретное преобразование Фурье (БПФ) реализации на отрезке конечной длительности Т;
- накопление (усреднение) спектров по r реализациям - определение усредненной оценки S'(ωк);
- усреднение полученной на предыдущем этапе спектрограммы S'(ωк) по частотам с помощью прямоугольного окна - получение усредненной оценки S''(ωк);
- определение порога обнаружения α по правилу Неймана-Пирсона при задаваемой вероятности ложного обнаружения Рл;
- нахождение отношения усредненных оценок S'(ωк) и S''(ωк) и сравнение с пороговым значением α. Превышение порога обнаружения свидетельствует о наличии дискретной составляющей (ДС) на данной частоте. Информация об обнаруженных дискретных составляющих используется при решении задач распознавания (классификации) в качестве одного из основных признаков сигналов шумоизлучения различных объектов.
Недостатком этого способа является то, что для цели класса торпеда портрет по мгновенным значениям частот ДС не может служить точным признаком класса из-за сложной динамики движения торпеды.
Так, например, в работе В.А. Новакова «Исследование эффективности двух и трехрежимных по скорости хода торпед с системой автоприцеливания без накопления информации» показано, что эффективное преследование цели в режиме автоприцеливания может быть обеспечено только за счет многократного переключения скоростей. При этом необходимо учитывать, что для перехода с одной скорости на другую необходимо некоторое время на разгон (торможение). («Подводное морское оружие», выпуск 15, 2010 г.; научно-технический сборник ОАО «Концерн Морское подводное оружие - Гидроприбор», стр. 52-57).
При этом частоты ДС спектрального портрета в момент разгона (увеличения оборотов двигателя) постепенно увеличиваются до установления требуемой скорости, а в момент торможения (уменьшения оборотов двигателя) постепенно уменьшаются. Для других типов торпед двигатель запускается в момент приводнения торпеды. Торпеда набирает обороты (разгоняется) для достижения заданной скорости и глубины поиска цели по кругу в соответствии с установленной программой. (В.В. Сурнин, Ю.Н. Пелевин, В.Л. Чулков «Противолодочные средства иностранных флотов», Москва, военное издательство, 1991 г., стр. 63-68). Кроме того область шумности торпеды и наличие характерных дискретных составляющих в спектре ее шумоизлучения частично пересекаются с областями объектов других классов, что также снижает вероятность правильной классификации цели класса торпеды.
Задачей изобретения является повышение вероятности правильной классификации цели класса торпеда.
Технический результат изобретения заключается в обеспечении учета динамики движения обнаруженного объекта, в обеспечении возможности определения режима движения торпеды, что повышает боевую устойчивость корабля.
Для обеспечения указанного технического результата в способ классификации гидроакустических сигналов шумоизлучения морского объекта, содержащий прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой, обработку принятого сигнала, включающую преобразование сигнала в цифровой вид, спектральную обработку принятых сигналов, накопление полученных спектров мощности, сглаживание спектра по частоте, определение порога обнаружения, исходя из вероятности ложных тревог и принятие решения о наличии дискретной составляющей (ДС) при превышении порога обнаружения текущего спектра на данной частоте, введены новые признаки, а именно:
- По частотам ДС (fДСj,) принимают предварительное решение, что морской объект - цель класса торпеда,
- После обнаружения торпеды в момент (ti) формируют и запоминют массив параметров за интервал времени Δt: пеленг (Пi); среднеквадратическое отклонение ошибки пеленгования (σПi); массив частот (fДС);
- За время Δt вычисляют значение величины изменения fДСj (ВИЧДСj) с учетом знака +/- для каждой ДCj массивов fДСj по формуле:  [Гц/с], где ƒj,ti, ƒj,ti+Δt частоты i-го сигнала в моменты времени ti и ti+Δt соответственно;
[Гц/с], где ƒj,ti, ƒj,ti+Δt частоты i-го сигнала в моменты времени ti и ti+Δt соответственно;
- Из полученных массивов ВИЧДСj,ti находят максимальное по модулю значение ВИЧДСj,ti и запоминают знак этого значения;
- По величине и знаку максимального по модулю значения ВИЧДСj,ti определяют режим движения торпеды. Если значение ВИЧДСj,ti положительное - торпеда ускоряется, если отрицательное - торпеда замедляется.
- По массиву пеленгов (П) за время Δt оценивают амплитуду колебаний П через дисперсию П по формуле  где n - число отсчетов параметра П за время Δt, Пi - текущее значение параметра П, S2 - дисперсия фактора не случайного изменения пеленга;
где n - число отсчетов параметра П за время Δt, Пi - текущее значение параметра П, S2 - дисперсия фактора не случайного изменения пеленга;
- Вычисляют отношение дисперсий  и сравнивается с порогом F. Если
и сравнивается с порогом F. Если  - торпеда маневрирует, при
- торпеда маневрирует, при  - движение торпеды прямолинейное.
- движение торпеды прямолинейное.
Порог F может быть определен экспериментально или по критерию Фишера F1-p(к1,к2), где k1=(nq-1), k2=(n-1) степени свободы, nq - величина выборки (количество отсчетов) при оценке σП2, n - величина выборки при оценке S2, р - уровень задаваемой значимости.
Сущность изобретения заключается в определении параметров, учитывающих динамику движения обнаруженного морского объекта, т.е. классификацию обнаруженного морского объекта по «спектрально-временному портрету» в обеспечение решения задачи противоторпедной защиты (ПТЗ) кораблей.
Современные торпеды классифицируются по режимам хода (однорежимные, многорежимные с переключением режима на ходу и при приготовлении), по типам траекторий движения (прямоидущие, маневрирующие).
Спектральный портрет для каждого типа торпед определяется спектральным портретом, связанным в основном с вально-лопастным звукорядом, который определяется формулой  где n - число оборотов движителя в минуту, z - число лопастей винта.
где n - число оборотов движителя в минуту, z - число лопастей винта.
В режиме перехода торпеды с одной скорости на другую величина изменения частоты определяется разностью оборотов  где N1 - число оборотов в момент ti, а N2 - в момент времени t(ti+Δt).
где N1 - число оборотов в момент ti, а N2 - в момент времени t(ti+Δt).
Величина параметра ВИЧДСj,ti [Гц/с] (Δf/Δt,) с учетом знака +/- и количество переходов от Vmin к Vmax и наоборот, то есть количество зафиксированных ВИЧДСj,ti, характеризуют тип торпеды и режим хода (работы движителя) на текущий момент времени.
Положительное значение параметра ВИЧ [Гц/с] определяет переход режима торпеды с минимальной скорости Vmin на максимальную скорость Vmax. Отрицательное значение параметра ВИЧДСj,ti [Гц/с] определяет переход режима торпеды с Vmax на Vmin..
Для определения типа (траектории) движения торпеды (прямолинейная, маневрирующая) определяют величину отношения дисперсий  сравнивают это отношение с порогом F, который может быть определен по критерию Фишера F1-p,(к1,к2), где k1=(nq-1), k2=(n-1) степени свободы, nq - величина выборки (количество отсчетов) при оценке σП2, n - величина выборки при оценке S2, р - уровень задаваемой значимости. Так, например, уровню значимости р=0.05, что допускает ошибку в пяти случаях из ста, соответствует доверительная вероятность 1-р=0.95. Значение F1-p,(к1,к2), определяется по электронной таблице распределения Фишера F1-p для заданного уровня значимости и числу степеней свободы. Если
сравнивают это отношение с порогом F, который может быть определен по критерию Фишера F1-p,(к1,к2), где k1=(nq-1), k2=(n-1) степени свободы, nq - величина выборки (количество отсчетов) при оценке σП2, n - величина выборки при оценке S2, р - уровень задаваемой значимости. Так, например, уровню значимости р=0.05, что допускает ошибку в пяти случаях из ста, соответствует доверительная вероятность 1-р=0.95. Значение F1-p,(к1,к2), определяется по электронной таблице распределения Фишера F1-p для заданного уровня значимости и числу степеней свободы. Если  торпеда маневрирует (рысканье, змейка), при
торпеда маневрирует (рысканье, змейка), при  - движение торпеды прямолинейное. Порог F также может быть определен экспериментально.
- движение торпеды прямолинейное. Порог F также может быть определен экспериментально.
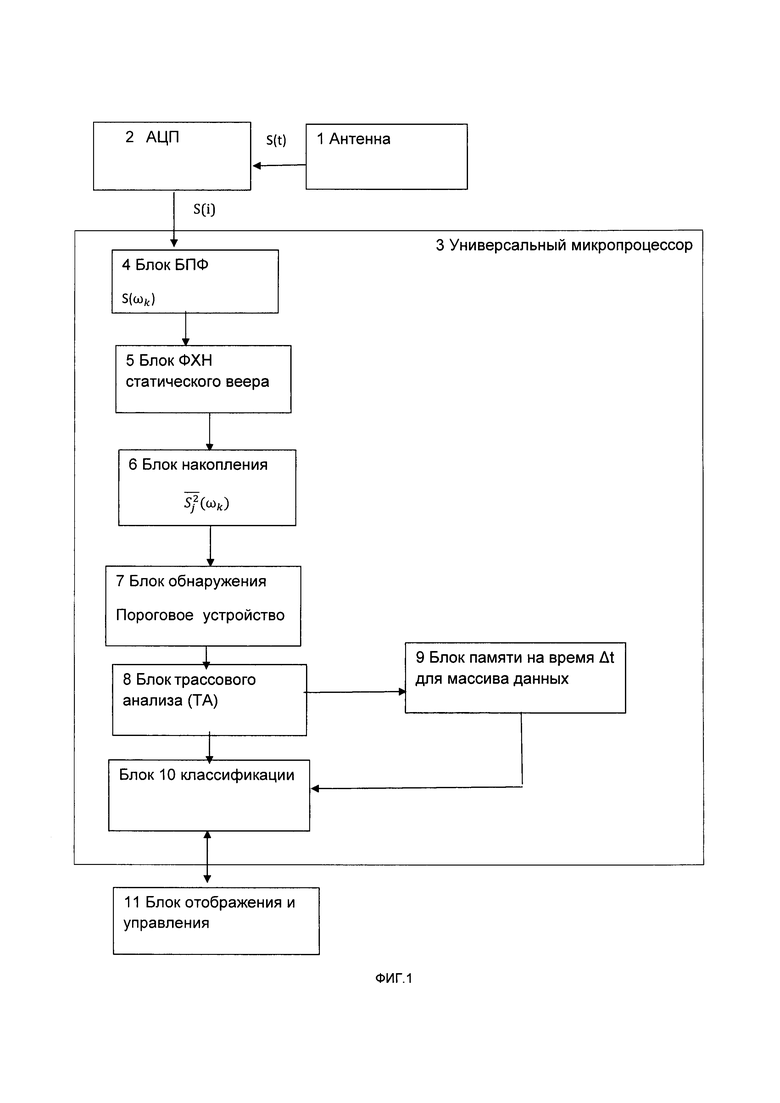
Сущность изобретения поясняется фиг. 1, где приведена блок-схема устройства, реализующего способ.
Устройство (фиг. 1) содержит гидроакустическую антенну 1, которая соединена через аналого-цифровой преобразователь 2 (АЦП) с универсальным микропроцессором 3. В состав универсального микропроцессора входят последовательно соединенные блок 4 БПФ, выход которого соединен с блоком 5 формирования характеристик направленности статического веера (СФХН), выход блока 5 соединен с входом блока 6 накопления. Выход блока 6 соединен с входом блока 7 обнаружения, выход блока 7 соединен с входом блоком 8 трассового анализа. Из блока 8 трассового анализа в блок 9 памяти на время Δt, поступает информация в виде временной последовательности спектра обнаруженного объекта. Временной интервал Δt выбирают исходя из требований к времени выработки решения класса торпеды с момента ее обнаружения. Выходы блока 8 и блока 9 соединены с входом блока 10 классификации. Выход блока 10 соединен с блоком 11 отображения и управления.
Блок 2 может быть выполнен так, как это описано в Справочнике «Цифровая обработка сигналов», изд. Радио и связь, 1985 г., стр. 91. Блок 3 универсального микропроцессора с блоками 4 и 5 могут быть реализованы, как описано в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», Санкт-Петербург: Наука, 2004 г., Стр. 248-250, 284. Блок 6 описан, например, в книге А.А. Харкевича «Борьба с помехой», изд. Наука, Москва, 1965 г., стр. 70-71. Выработка решения об обнаружении цели в блоке 7 может быть реализована, как например описано в книге Л.С. Гутина «Теория оптимальных методов радиоприема при флуктуационных помехах», Москва, «Советское радио», стр. 247-253.
Блок 8 трассового анализа может быть выполнен, как например описан в статье «Об идентификации трассовых обнаружителей при многоканальном пеленговании» Б.Л. Нерославский, Н.Л. Щетолева, ФГУП ЦНИИ «Морфизприбор», Санкт-Петербург, Россия Научно-технический сборник «Гидроакустика», вып. 2, 2000 г.
Блок 9 классификации, который содержит «базу спектральных портретов» может быть реализован, как показано в статье «Акустическая система дистанционного наблюдения за вертолетами» Акад. РАРАН В.И. Кандратьев, С.В. Новиков, Д.Н. Рассадов, Известия Российской Академии Ракетных и Артиллерийских Наук, 2010 г., №66 стр. 9-14. Блоки 9 и 10 могут быть выполнены на основе современного универсального микропроцессора, обладающего способностью работать в реальном времени, возможностью перехода с одной задачи на другую, наличием гибкой адресации к памяти, большой скоростью обработки данных. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», Санкт-Петербург: Наука, 2004 г., стр. 284.
Блок 11 может быть выполнен так, как описан в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», Санкт-Петербург: Наука, 2004 г., стр. 255-261.
Реализацию способа целесообразно описать на примере работы устройства (фиг. 1)
Сигналы Si(t) приемных каналов антенны поступают на АЦП, сигнал Si(k) из АЦП в виде дискретных отсчетов поступает соответственно в универсальный микропроцессор 3. В блок 5 из блока 4 поступают отсчеты реализации комплексного спектра сигнала для каждого элемента антенны для формирования характеристик направленности статического веера, а с выхода блока 5 в блок 6 накопления поступают временные последовательности пространственно-частотных спектров мощности с веера характеристик направленности. Накопленные временные последовательности спектров мощности  поступают на пороговое устройство блока 7. Спектры обнаруженного объекта поступают в блок 8 трассового анализа (ТА) Из блока ТА в блок памяти 9 в момент обнаружения объекта (ti) передают массив параметров: пеленг П, σП, и массива частот трасс ДС (fДСj,). Массив фиксируют и запоминают за интервал времени Δt. Временной интервал Δt выбирают исходя из требований к времени выработки решения класса торпеды с момента ее обнаружения
поступают на пороговое устройство блока 7. Спектры обнаруженного объекта поступают в блок 8 трассового анализа (ТА) Из блока ТА в блок памяти 9 в момент обнаружения объекта (ti) передают массив параметров: пеленг П, σП, и массива частот трасс ДС (fДСj,). Массив фиксируют и запоминают за интервал времени Δt. Временной интервал Δt выбирают исходя из требований к времени выработки решения класса торпеды с момента ее обнаружения
В последующие моменты времени по данным трассового анализа записывают массив параметров с учетом идентификации от цикла к циклу по трассам fДСj до цикла на момент времени ti+Δt. Ha последнем цикле, на момент времени ti+Δt,. вычисляют значение ВИЧДСj (с учетом знака +/-) для каждой ДСj массивов ДСj по формуле: 
Для определения типа (траектории) движения торпеды (прямолинейная, маневрирующая) по массиву пеленгов (П) за время Δt оценивают амплитуду колебаний через средний квадрат отклонений П по формуле
 где n - число отсчетов параметра П за время Δt,
где n - число отсчетов параметра П за время Δt,
Пi - текущее значение параметра П, S2 - дисперсия фактора не случайного изменения пеленга.
Сравнение дисперсий проводится по критерию Фишера (Е.И. Пустыльник «Статистические методы анализа и обработки наблюдений». изд. Наука, Москва, 1968 г., стр. 189-192) т.е. вычисляют отношение  и сравнивают с порогом (критическим значением) F1-р,(к1,к2), где k1=(ng-1), k2=(n-1) степени свободы, р-уровень задаваемой значимости. Если
и сравнивают с порогом (критическим значением) F1-р,(к1,к2), где k1=(ng-1), k2=(n-1) степени свободы, р-уровень задаваемой значимости. Если  то влияние фактора не случайного изменения пеленга является значимым, т.е. цель маневрирует. При
то влияние фактора не случайного изменения пеленга является значимым, т.е. цель маневрирует. При  - фактор не случайного изменения пеленга незначителен. Тип траектории движения торпеды - прямолинейная.
- фактор не случайного изменения пеленга незначителен. Тип траектории движения торпеды - прямолинейная.
Параметр ВИЧДСj,ti с числом переходов от Vmin к Vmax и наоборот и  или
или  поступают в блок 10 классификации на текущий момент времени по обнаруженной цели.
поступают в блок 10 классификации на текущий момент времени по обнаруженной цели.
По истечению времени Δt массивы данных обнуляются, и задача в блоке памяти запускается сначала.
В блоке 10 к выработке решения по базе спектральных портретов класса торпеда поступают из блока 9 параметры, зависящие от траектории движения +/- ВИЧ, количество переходов от Vmin к Vmax и наоборот и  или
или  что увеличивает вероятность правильной классификации цели класса торпеда и повышает эффективность противоторпедной защиты. Блок 11 позволяет, при знании типа торпеды, дополнять спектральный портрет в базе данных блока 10 параметрами, учитывающими траекторию движения данного типа торпеды, т.е. формировать «спектрально-временной портрет».
что увеличивает вероятность правильной классификации цели класса торпеда и повышает эффективность противоторпедной защиты. Блок 11 позволяет, при знании типа торпеды, дополнять спектральный портрет в базе данных блока 10 параметрами, учитывающими траекторию движения данного типа торпеды, т.е. формировать «спектрально-временной портрет».
Таким образом, определение параметров, учитывающих особенности движения торпеды, способствует повышению вероятности правильной классификации цели класса торпеда и повышению эффективности противоторпедной защиты, и способствует формированию «спектрально-временного портрета», учитывающего изменение спектра в зависимости от режима работы торпед разных типов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| Способ обнаружения и классификации гидроакустических сигналов шумоизлучения морского объекта | 2019 |
|
RU2726291C1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2022 |
|
RU2801677C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТОРПЕДЫ | 2012 |
|
RU2492497C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ СУДОВ | 2015 |
|
RU2584355C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2754602C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано в задачах классификации объекта при разработке гидроакустических систем. Сущность: определяют величину изменения частоты, связанную с переключением скорости (изменением числа оборотов движителя) на траектории движения торпеды. Для оценки типа траектории движения (прямолинейная, маневрирующая) оценивают амплитуду колебаний пеленга (П) через дисперсию Π и решение принимается по критерию Фишера. Технический результат: определение параметров, учитывающих динамику движения обнаруженного объекта, т.е. классификацию обнаруженной цели по «спектрально-временному портрету», что повышает вероятность правильной классификации цели класса торпеды, а значит повышает результат решения задачи боевой устойчивости корабля. 1 з.п. ф-лы, 1 ил. 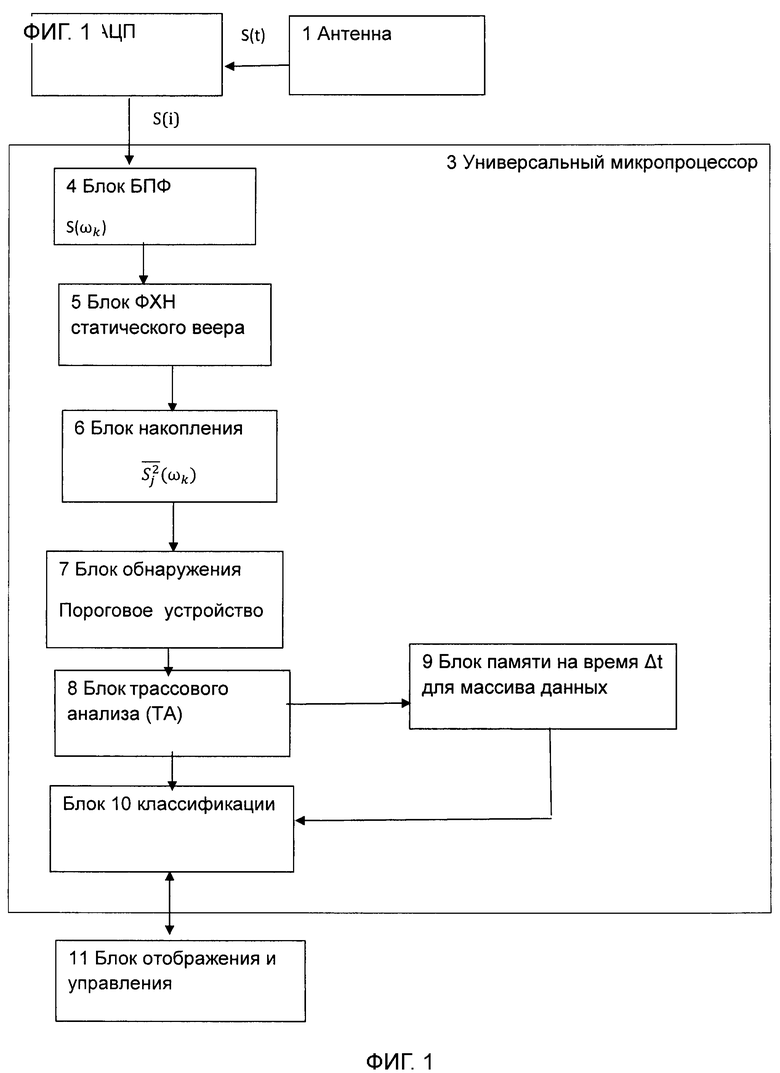
1. Способ классификации гидроакустических сигналов шумоизлучения морского объекта, содержащий прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой, обработку принятого сигнала, включающую преобразование сигнала в цифровой вид, спектральную обработку принятых сигналов, накопление полученных спектров мощности, сглаживание спектра по частоте, определение порога обнаружения исходя из вероятности ложных тревог и при превышении порога обнаружения текущего спектра на данной частоте принятие решения о наличии дискретной составляющей (ДС), отличающийся тем, что по частотам ДС (fДСj,) принимают предварительное решение, что морской объект - торпеда, после обнаружения торпеды в момент (ti) формируют и запоминают за интервал времени Δt массив параметров: пеленг Пi, среднеквадратическое отклонение ошибки пеленгования σПi и массив частот fДС, за время Δt вычисляют значение величины изменения fДСj ВИЧДСj с учетом знака +/- для каждой ДCj массивов fДСj по формуле:  , Гц/с, где ƒj,ti,, ƒj,ti+Δt - частоты i-го сигнала в моменты времени ti и ti+Δt соответственно, из полученных массивов ВИЧДСj,ti находят максимальное по модулю значение BИЧДСj,ti и запоминают знак этого значения, по массиву пеленгов (П) за время Δt оценивают амплитуду колебаний П через дисперсию П по формуле
, Гц/с, где ƒj,ti,, ƒj,ti+Δt - частоты i-го сигнала в моменты времени ti и ti+Δt соответственно, из полученных массивов ВИЧДСj,ti находят максимальное по модулю значение BИЧДСj,ti и запоминают знак этого значения, по массиву пеленгов (П) за время Δt оценивают амплитуду колебаний П через дисперсию П по формуле  где n - число отсчетов параметра П за время Δt, Пi - текущее значение параметра П, S2 - дисперсия фактора неслучайного изменения пеленга, вычисляют отношение дисперсий
где n - число отсчетов параметра П за время Δt, Пi - текущее значение параметра П, S2 - дисперсия фактора неслучайного изменения пеленга, вычисляют отношение дисперсий  , сравнивают с порогом F, если
, сравнивают с порогом F, если  торпеда маневрирует,
торпеда маневрирует,  движение торпеды прямолинейное, по величине и знаку максимального по модулю значения ВИЧДСj,ti определяют режим движения торпеды (положительное значение ВИЧДСj,ti - торпеда ускоряется, а если отрицательное - торпеда замедляется).
движение торпеды прямолинейное, по величине и знаку максимального по модулю значения ВИЧДСj,ti определяют режим движения торпеды (положительное значение ВИЧДСj,ti - торпеда ускоряется, а если отрицательное - торпеда замедляется).
2. Способ по п. 1, отличающийся тем, что порог F может быть определен по критерию Фишера F1-p(к1-к2), где k1=(ng-1), k2=(n-1) - степени свободы, nq - величина выборки (количество отсчетов) при оценки σП2, n - величина выборки при оценки S2, р - уровень задаваемой значимости.
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| US 8107320 B2, 31.01.2012. | |||

