Предлагаемое изобретение относится к области точного земледелия в сельском хозяйстве и может быть применено в области защиты растений.
Известен способ управления агрегатом защиты растений, состоящий из транспортного средства и опрыскивателя, заключающийся в том, что движением агрегата защиты растений управляют с помощью бортового компьютера с навигационной спутниковой системой в соответствии с введенными в бортовой компьютер координатами трассы. Например, агрегаты и электронные системы фирмы John Deere, дисплей GS2 (см. URL:http://stellarsupport.deere.com/en_INT/pdfs/Russian/ompfp10244_е0_59_25_may10_RUS_GS2_Display_Basic_Applications.pdf, файл: ompfp10244_e0_59_25may10_RUS_GS2_Display_Basic_Applications.pdf. Дата публикации данного документа указана в его свойствах - 08.06.2011 г), Swath Control - дополнительный модуль системы GS2 Pro. Работает с распылителями JD Horst 700i, 800i и распылителем 5430i.
Управление движением осуществляется системой AutoTrac. Система Swath Control Pro может автоматически включать и выключать машину и секции агрегата в зависимости от предыдущего фактического покрытия и границы (внешнюю, внутреннюю и внешнюю часть конца гона).
Отличия от предложенного способа состоят в том, что управление опрыскиванием осуществляют в зависимости от ее нахождения в участках перекрытия гонов поля или обработанных/необработанных участках поля, а не в зависимости от ее нахождении в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), а управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количество форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) и управление опрыскиванием осуществляют без учета минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля опрыскиванием при заданной точности навигации и системы определения географических координат.
При этом способе управления агрегатом защиты растений параметры экологического вреда (экологический вред определяется количеством вредных веществ, попавших в окружающую среду сверх нормативных показателей и пропорционален переопрыскиванию, зараженные участки с опрыскиванием более одного раза, недоопрыскиванию, необработанные зараженные участки, обработанным незараженным участкам) и параметры энергоресурсных затрат эксплуатации агрегата защиты растений (общая длина трассы, длина трассы холостых пробегов (прохождение одного и того же участка трассы без опрыскивания данного участка поля при неоднократном обходе препятствий или изгибов участка поля) имеют неоптимальные значения вследствие отсутствия выбора управления агрегатом защиты растений, т.е. движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок, и управления опрыскиванием от минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат.
Это приводит к ухудшению экологии природы и увеличению энергоресурсных затрат эксплуатации агрегата защиты растений.
Наиболее близким по технической сущности к предлагаемому способу (прототипом) является способ управления агрегатом защиты растений опрыскивателя, разработанный компанией Trimble (см. http://trl.trimble.com/docushare/dsweb/Get/Document-311632/, файл: 022503-078F-RUS_2011_Ag_Portfolio_BRO_1110_LR.pdf. Название документа: 2011 Trimble Agriculture Product Portfolio - Russian version. Дата публикации данного документа указана в его свойствах - 25.03.2011 г.), состоящим из транспортного агрегата и опрыскивателя, заключающийся в том, что движением агрегата защиты растений управляют с помощью бортового компьютера с навигационной спутниковой системой (дисплей CFX-750™ параллельного вождения и точного земледелия, подруливающее устройство Trimble® EZ-Steer®, GPS приемник, система контроля внесения материалов FIELD-IQ), а управление опрыскивателем осуществляют включением/выключением секций с помощью системы контроля внесения материалов FIELD-IQ, отличающийся от предложенного способа тем, что управление опрыскиванием осуществляют включением форсунок опрыскивателя в участках поля, подлежащих опрыскиванию, а не в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), а управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) и управление опрыскиванием осуществляют без учета минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля опрыскиванием при заданной точности навигации и системы определения географических координат
При этом способе управления агрегатом защиты растений параметры экологического вреда и энергоресурсных затрат агрегата защиты растений так же имеют неоптимальные значения вследствие отсутствия выбора управления агрегатом защиты растений, т.е. выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок, и управления опрыскиванием от минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат.
Это приводит к ухудшению экологии природы и увеличению энергоресурсных затрат эксплуатации агрегата защиты растений.
Сущность изобретения заключается в том, что управление опрыскиванием осуществляют включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок), управление опрыскиванием осуществляют для минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, с учетом пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат.
Это достигается тем, что управление опрыскиванием (включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) при заданной точности навигации и системы определения географических координат определяют при расчете на ЭВМ по цифровой модели поля с нанесенными на нее географическими координатами поля, препятствий и зон заражения минимального значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений при варьировании геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок с учетом пространственного положения зон заражения и конфигурации поля, точности определения географических координат поля, объектов-препятствий и зон заражения, точности навигации
Определенные параметры управления агрегатом защиты растений (геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) для минимального значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений определяют тип транспортного средства и опрыскивателя с определенной точностью позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки.
Массив координат трассы и координаты включения каждой форсунки опрыскивателя вводят в бортовой компьютер для управления перемещением агрегата и работой опрыскивателя на поле при его навигации (включением форсунок опрыскивателя, если она находится над обработанным участком зоны заражения). При этом пределы изменения трассы на поле определяются границами зон заражения, а не всего поля.
Технический результат, объективно проявляющийся при осуществлении способа, заключается в минимизации экологического вреда (воздействия ядохимикатов средств защиты растений на окружающую среду) и энергоресурсных затрат эксплуатации агрегата защиты растений (уменьшения длины трассы движения агрегата по участкам, включающим зоны заражения, т.к. в этом случае нет необходимости его движения по незараженным участкам поля, и длины трассы холостого хода) за счет выбора типа транспортного средства и опрыскивателя с определенной точностью позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, геометрии трассы движения и управления форсунками опрыскивателя (нанесения препарата защиты растений только в пределах зоны заражения), определяемых при расчете минимального значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений.
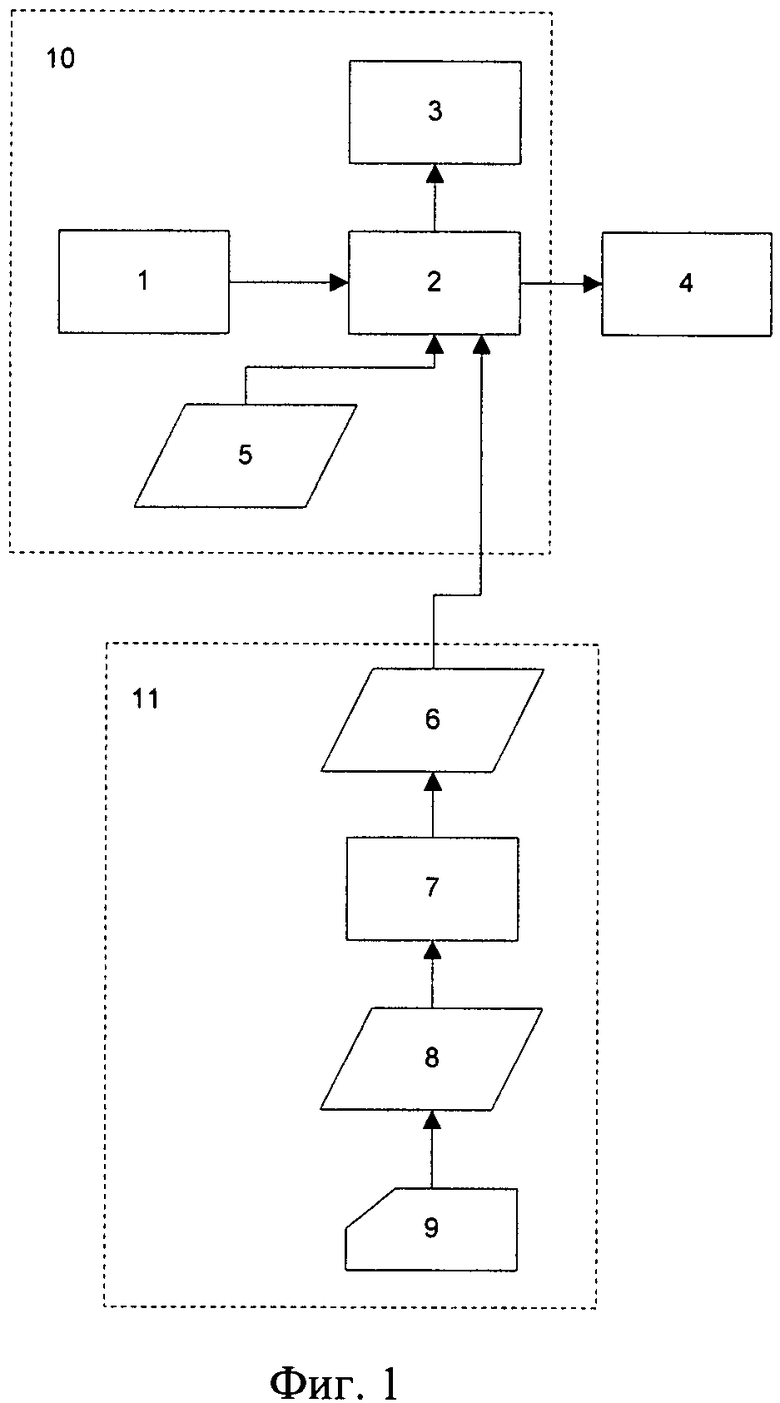
На фиг.1 изображено устройство для реализации способа управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных полях. Устройство состоит из транспортного агрегата, опрыскивателя, блока расчета трассы. Транспортный агрегат 10 состоит из GPS приемника спутниковых координат 1, бортового компьютера 2, устройства управления движением агрегата 3, программы бортового компьютера управления движением агрегата по расчетной трассе 5. Опрыскиватель 4 состоит из штанги с форсунками распыливания средства защиты растений с управлением включением/отключением по сигналам бортового компьютера агрегата. Блок расчета трассы 11 состоит из универсальной ЭВМ 7, программы расчета трассы 8, цифровой модели поля 9, массива данных 6 координат GPS трассы и координат включения форсунок опрыскивателя 4.
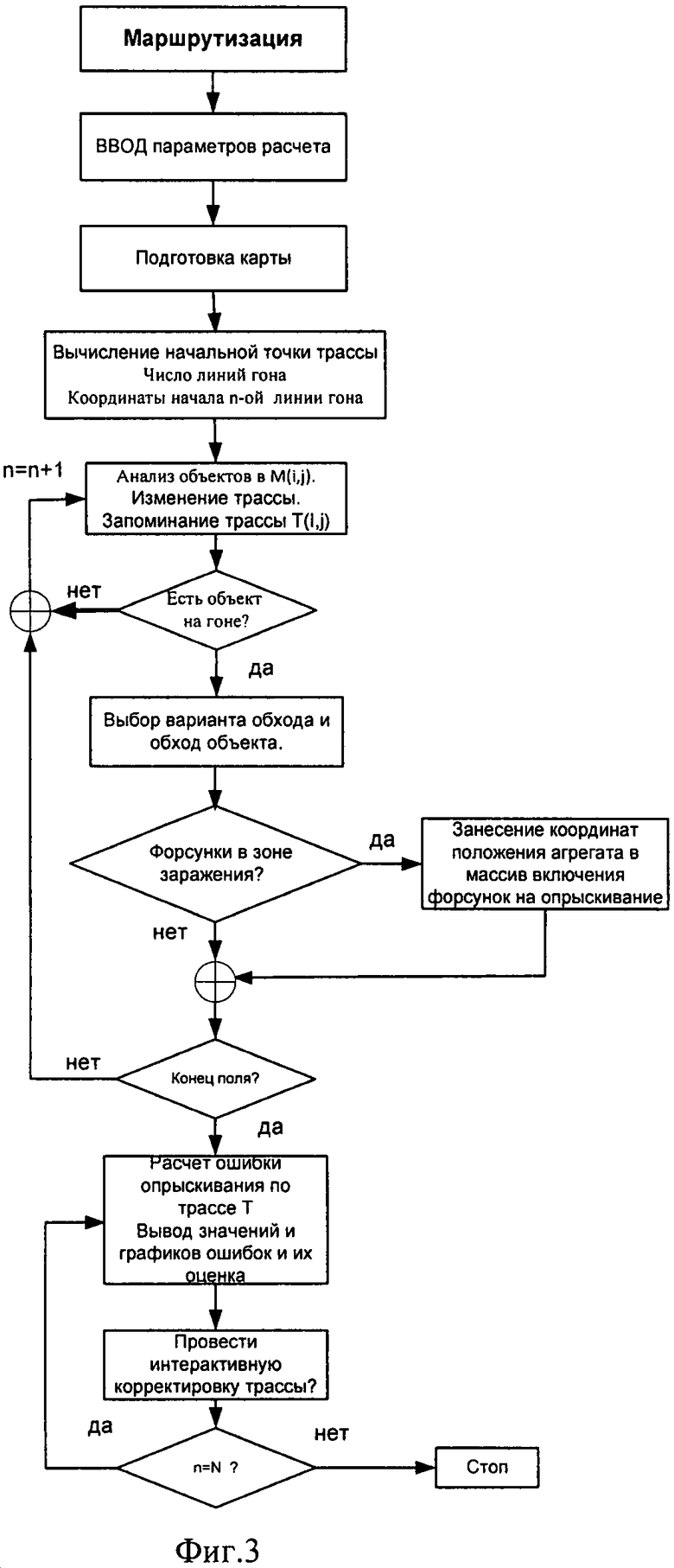
На Фиг.2 изображена цифровая модель сельскохозяйственного поля для расчета трассы агрегата с опрыскивателем для защиты растений, включающая препятствия движению агрегата 12, агрегат 13 со штанговым опрыскивателем, трассу транспорта агрегата 14 в виде прямолинейных гонов с шагом ΔI 18 и ошибкой позиционирования агрегата относительно расчетной трассы Δrpoz 21, зону заражения 15 с ошибкой навигации Δrnav 17 и поле 16 с координатами I 19, J 18.
Способ управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных полях реализуется следующим образом, фиг.1 - фиг.2: транспортный агрегат 10 принимает сигналы спутниковой навигации посредством GPS приемника 1, которые вводятся в бортовой компьютер 2. Бортовой компьютер 2 в соответствии с заложенной программой 5 в ходе движения минимизирует отклонение текущих спутниковых координат от координат трассы в текущей точке его положения путем управления направлением движения с помощью устройства управления движением агрегата 3 и управляет включением форсунок опрыскивателя 4 в соответствии с введенным в бортовой компьютер массивом координат 6 форсунок опрыскивателя 4. Параметры агрегата защиты растений, массив координат трассы и массив данных управления форсунками опрыскивателя рассчитываются заранее в блоке расчета трассы 11 на универсальной ЭВМ 7 программой расчета трассы 8 по цифровой модели поля 9, содержащей препятствия 12 и зону заражения 15.
Параметры агрегата защиты растений, трассу движения агрегата и управление включением форсунок выбирают для минимального значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений. Для этого рассчитывают программой расчета трассы 8 по цифровой модели поля 9, содержащей препятствия 12 и зону заражения 15, значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений при варьировании геометрии трассы с учетом пространственного положения зон заражения и конфигурации поля, точности определения координат поля, объектов-препятствий и зон заражения, точности навигации, параметров опрыскивателя (длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунки), точности позиционирования агрегата на трассе. При этом пределы изменения трассы на поле определяются границами зон заражения, а не всего поля.
Экологический вред пропорционален площадям опрыскивания:
s1 - опрыскивание здоровой зоны, s2 - переопрыскивание здоровой зоны, s3 - опрыскивание зараженной зоны, s4 - переопрыскивание зараженной зоны, s5 - недоопрыскивания зараженной зоны.
Экологический вред определится как величина s6, пропорциональная площади поля, обработанного ядохимикатом:

Коэффициент качества технологической обработки, равный отношению обработанной и полной площадей зоны заражения sz:

Коэффициент экологического вреда, равный отношению площади обработанной зоны заражения к полной площади опрыскивания:

В общем случае максимальные энергоресурсные затраты агрегата Еао определяются суммой длины трассы агрегата на поле однократного прохода - Lo, разворотов на границе поля и на повторный обход объектов и выступов границ поля - Lxx при их затратах на единицу длины пути и длины штанги опрыскивателя k*LS

Коэффициент энергоресурсных затраты агрегата Kэн равен отношению полезных энергоресурсных затрат Lo к общим затратам

Определим качество опрыскивания Копр как мультипликативную оценку:

или

Для фиксированной длины штанги LS Копр представляет поверхность в варьируемых координатах. Значения Копр вычисляются программой расчета трассы 8 по цифровой модели поля 9, содержащей препятствия 12 и зону заражения 15, для заданных исходных параметров. Параметры агрегата защиты растений, длина штанги, количество форсунок на штанге, радиус факела распыла форсунки, критерий включения форсунки, геометрия трассы движения, координаты включения форсунок определяются точкой поверхности с максимальным значением Копр. Массив координат трассы и управления опрыскивателем вводятся в бортовой компьютер агрегата для управления работой при движении по трассе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ непрерывного автоматического управления посевным агрегатом и агрегатом защиты растений на различных стадиях обработки сельскохозяйственного поля при спутниковой навигации | 2018 |
|
RU2708154C1 |
| Способ возделывания сельскохозяйственных культур | 2016 |
|
RU2637521C1 |
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
| Штанга опрыскивателя | 2023 |
|
RU2810004C1 |
| САМОХОДНЫЙ РОБОТ-ОПРЫСКИВАТЕЛЬ ДЛЯ ОБРАБОТКИ РАСТЕНИЙ ЗЕМЛЯНИКИ И ДРУГИХ НИЗКОРАСТУЩИХ КУЛЬТУР | 2015 |
|
RU2592904C1 |
| Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации | 2016 |
|
RU2622617C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Способ бокового опрыскивания овощных культур | 2023 |
|
RU2817070C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
Изобретение относится к области сельского хозяйства. В способе управляют агрегатом защиты растений, состоящим из транспортного средства и опрыскивателя с форсунками для распыливания средства защиты. Управление движением агрегата защиты растений осуществляют с помощью бортового компьютера с навигационной системой в соответствии с введенными в бортовой компьютер координатами трассы. Управление опрыскиванием осуществляют включением форсунок опрыскивателя в необработанных участках поля. При этом управление опрыскиванием осуществляют включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию - зоны заражения. Управление агрегатом защиты растений, движением и выбором геометрии трассы движения, точностью позиционирования агрегата на трассе, длиной штанги, количеством форсунок на штанге, радиусом факела распыла форсунки, критерием включения форсунок и управление опрыскиванием осуществляют с минимальным значением экологического вреда и энергоресурсных затрат агрегата защиты растений, с учетом пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат. Способ способствует минимизации экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений путем уменьшения длины трассы движения агрегата по участкам, включающим зоны заражения. 4 ил.
Способ управления агрегатом защиты растений, состоящим из транспортного средства и опрыскивателя с форсунками для распыливания средства защиты, заключающийся в том, что управление движением агрегата защиты растений осуществляют с помощью бортового компьютера с навигационной системой в соответствии с введенными в бортовой компьютер координатами трассы, а управление опрыскиванием осуществляют включением форсунок опрыскивателя в необработанных участках поля, отличающийся тем, что управление опрыскиванием осуществляют включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию, - зоны заражения, а управление агрегатом защиты растений, движением и выбором геометрии трассы движения, точностью позиционирования агрегата на трассе, длиной штанги, количеством форсунок на штанге, радиусом факела распыла форсунки, критерием включения форсунок и управление опрыскиванием осуществляют с минимальным значением экологического вреда и энергоресурсных затрат агрегата защиты растений, с учетом пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат.
| ЖУКОВА О | |||
| Точность на полях // Журнал "АГРОПРОФИ" | |||
| Раздел Растениеводство, 2008, июнь, №3, с.12-34 | |||
| Устройство для переключения многоступенчатых передач в моторных повозках | 1934 |
|
SU46148A1 |
| Приспособление к кинопроектору для окрашивания изображений на экране | 1932 |
|
SU36172A1 |
| Самоходные опрыскиватели HAGIE, [он-лайн] [найдено 2011-11-01] Найдено в Интернет URL: http://agrosoyuz.ua/products/technik/machines-plants/syringes/syringes. | |||

