Область техники, к которой относится изобретение
Изобретение относиться к области точного земледелия в сельском хозяйстве при использовании информационно-управляющих систем (ИУС) и может быть применено при обработке поля на стадии "ПОСЕВ" или (и) "ЗАЩИТА РАСТЕНИИ" в автоматическом режиме.
Уровень техники
Известен способ управления агрегатом защиты растений патент "Способ управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных по лях": пат. 2492626 Рос. Федерация: МПК A01G 13/00/ авторы и заявители Альт В.В., Нечаев А.И; патентообладатель ГНУ СибФТИ Россельхозакадемии, заключающийся в управления агрегатом защиты растений, состоящим из транспортного средства и опрыскивателя с форсунками для распыливания средства защиты, заключающийся в том, что управление движением агрегата защиты растений осуществляют с помощью бортового компьютера с навигационной системой в соответствии с введенными в бортовой компьютер координатами трассы, а управление опрыскиванием осуществляют включением форсунок опрыскивателя в необработанных участках поля, отличающийся тем, что управление опрыскиванием осуществляют включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию, - зоны заражения, а управление агрегатом защиты растений, движением и выбором геометрии трассы движения, точностью позиционирования агрегата на трассе, длиной штанги, количеством форсунок на штанге, радиусом факела распыла форсунки, критерием включения форсунок и управление опрыскивателем осуществляют с минимальным значением экологического вреда и энергоресурсных затрат агрегата защиты растений, с учетом пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат.
Однако, данный способ описывает управление только агрегатом защиты растений и не содержит действий по непрерывном сквозном автоматическом управлении движением, поскольку расчет трека производиться без учета конечного радиуса разворота агрегата, поэтому поворот и разворот осуществляется в режиме управления агрегатом механизатором и действий по управлению на стадии посева.
Раскрытие изобретения
Заявленный способ характеризуется как последовательность действий над материальными объектами (поле с заражением вредителями, объекты - препятствия (колки, овраги и пр.), агрегат защиты растений или посева) с помощью материальных средств (система съема спутниковых координат границ поля, объектов - препятствий, ИУС в составе: бортовой компьютер с системой управления движением агрегата, системой спутниковой навигации, внешней ЭВМ для расчета параметров и последовательности действий). Заявленный способ содержит новые действия и новый порядок действий, отсутствующие в прототипе: автоматическое управление агрегатом на поле с поворотом агрегата при обходе объектов - препятствий и разворотом агрегата на границе поля, действия определяющие управление агрегатами при обработки поля на стадии посев и защита растений. Эти действия отсутствуют в прототипе и имеют положительный эффект: автоматизация управлением без остановки агрегата для осуществления поворота и разворота и расширение области применения на стадию посев.
Таким образом, сущность изобретения заключается в расширении области применения на две стадии обработки поля и полной автоматизации управления агрегатами при обработки поля.
Это достигается тем, что. трек для непрерывного управления движением посевного агрегата и агрегата защиты растений рассчитывают с учетом радиуса поворота агрегата при обходе объектов- препятствий (колков) и разворота на границе поля, а расширение области применения достигается тем, что вначале рассчитывают управление движением и работой агрегата защиты растений по обработки поля, затем рассчитывают точно совпадающий по направлению управление движением и работой посевного агрегата, а обработку поля осуществляют вначале посевным агрегатом, затем агрегатом защиты растений.
Это позволяет исключить повреждение посевов за счет совпадения движения посевного агрегата и агрегата защиты растений. При несовпадении движения происходит повреждение посевов агрегатом защиты растений на участках несовпадающих трасс.
Технический результат
Технический результат, объективно проявляющийся при осуществлении способа, заключается в автоматическом управлении посевным агрегатом, так и агрегатом защиты растений на поле без остановки агрегата при повороте и развороте. Это дает возможность использования агрегатов - сельхоз роботов.
Краткое описание чертежей
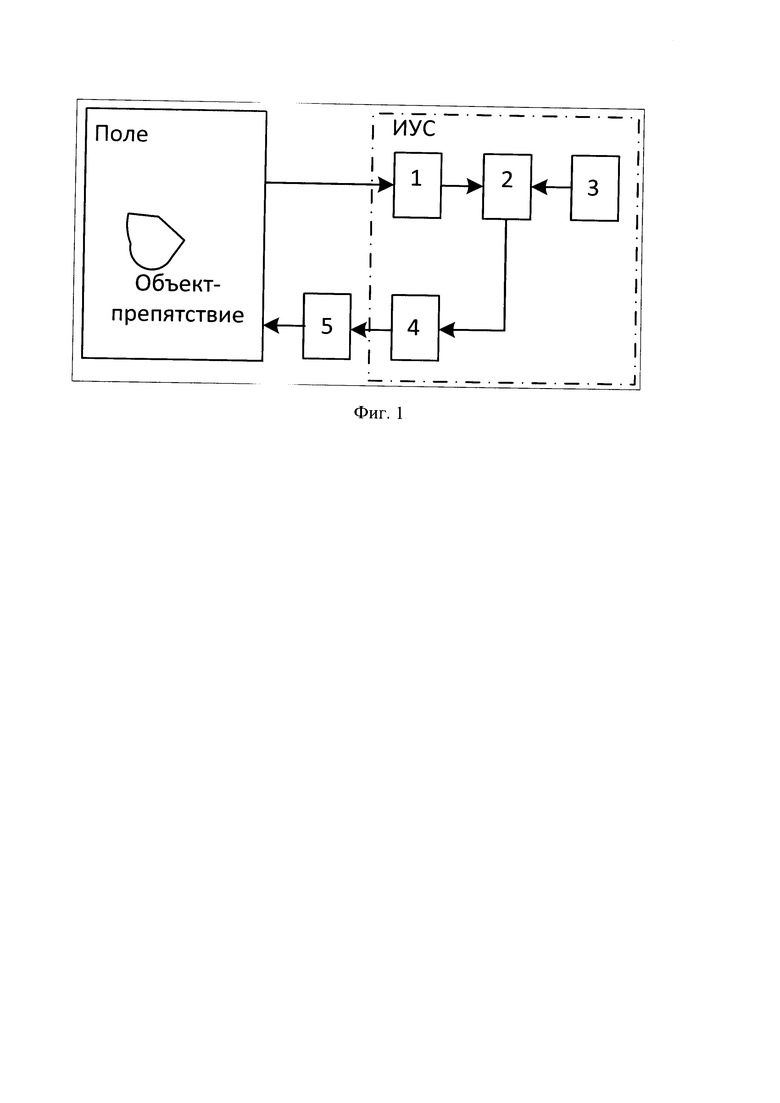
На фиг. 1 изображено устройство для реализации способа управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных полях.
Устройство состоит из ИУС, содержащая систему съема спутниковых координат границ поля, объектов - препятствий 1, ЭВМ для расчета параметров и последовательности действий 2, программы расчета 3, бортовой компьютер с системой управления движением агрегата и системой спутниковой навигации 4, агрегата посева или защиты растений 5.
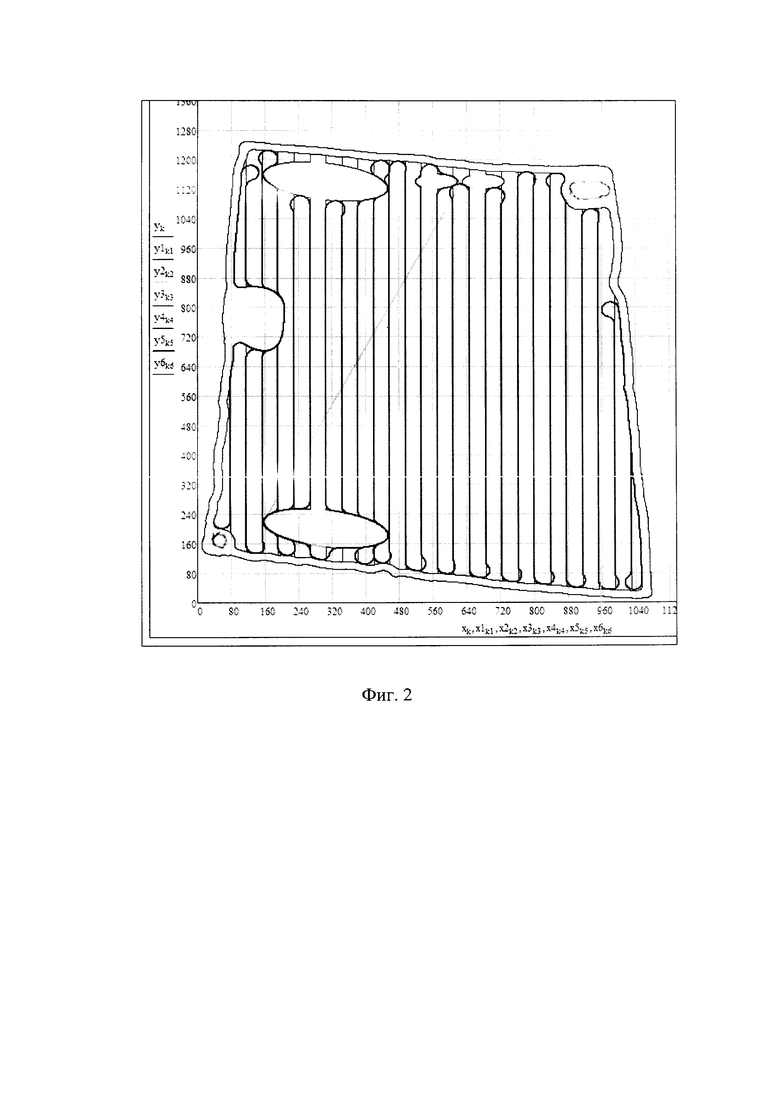
На фиг. 2 изображен пример расчета непрерывного трека движения агрегата с тест-объектами, близкими к границе поля.
Осуществление изобретения
Способ управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных полях реализуется следующим образом (фиг.1): с помощью системы съема GPS/ГЛОНАС спутниковых координат границ поля, объектов - препятствий 1 фиксируется и передается в ЭВМ расчета параметров и последовательности действий 2 файл с координатами контуров поля и объектов препятствий. ЭВМ 2 по программе 3 рассчитывает параметры управления агрегатом защиты растений и агрегатом посева при минимальном значении экологического вреда и энергоресурсных затрат агрегата защиты растений, с учетом пространственного положения зон заражения и конфигурации поля и учетом радиуса поворота агрегата для автоматического непрерывного управления агрегатом при обработки поля. Результаты расчета ЭВМ содержат трек для управления движением агрегата со спутниковой навигацией и файл с данными управления работой форсунками агрегата защиты растений для включения опрыскивания в необработанных участках поля и в расчетных точках трека движения агрегата на поле. Этим достигается минимизация экологического вреда до расчетных значений. Трек управления движением и файл с данными управления работой форсунками передается в бортовой компьютер с системой управления движением агрегата и системой спутниковой навигации 4. Агрегат 5 посева или защиты растений под управлением бортового компьютера 4 осуществляет непрерывное движение по расчетному треку на поле с поворотами и разворотами на границе поля и посев поля для стадии "ПОСЕВ" или защиту растений на стадии "ЗАЩИТА РАСТЕНИЙ".
Пример расчета непрерывного трека движения агрегата с тест-объектами, близкими к границе поля изображен на фиг2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ ЗАЩИТЫ РАСТЕНИЙ ПРИ СПУТНИКОВОЙ НАВИГАЦИИ НА СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПОЛЯХ | 2010 |
|
RU2492626C2 |
| Способ управления возделыванием зерновых культур | 2021 |
|
RU2781470C1 |
| Способ возделывания сельскохозяйственных культур | 2016 |
|
RU2637521C1 |
| Способ предуборочной десикации посевов сельскохозяйственных культур переменной нормой внутри одного поля | 2019 |
|
RU2717933C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Способ посева пропашных культур | 2022 |
|
RU2783602C1 |
| ПОЧВООБРАБАТЫВАЮЩЕ-ПОСЕВНОЙ АГРЕГАТ | 2002 |
|
RU2239296C2 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
Изобретение относится к области точного земледелия при использовании информационно-управляющих систем (ИУС) и может быть использовано при обработке поля на стадии "посев" или (и) "защита растений" в автоматическом режиме. Способ непрерывного автоматического управления посевным агрегатом и агрегатом защиты растений на различных стадиях обработки сельскохозяйственного поля при спутниковой навигации и минимизации экологического вреда и энергоресурсных затрат включает управление движением и работой агрегатов по обработке поля, рассчитанное с помощью информационно- управляющей системы (ИУС) и осуществляется с помощью бортового компьютера агрегата с навигационной системой. При этом параметры управления агрегатом защиты растений рассчитывают при минимальном значении экологического вреда и энергоресурсных затрат агрегата защиты растений с учетом пространственного положения зон заражения и конфигурации поля. Непрерывное управление движением посевного агрегата и агрегата защиты растений рассчитывают с учетом радиуса поворота агрегата при обходе объектов-препятствий (колков) и разворота на границе поля. Для управления посевным агрегатом вначале рассчитывают управление движением и работой агрегата защиты растений по обработке поля. После чего рассчитывают точно совпадающее по направлению управление движением и работой посевного агрегата. Обработку поля осуществляют вначале посевным агрегатом, затем агрегатом защиты растений. Изобретение позволяет за счет полной автоматизации управления агрегатами провести обработку поля без остановки агрегата, а также расширить область применения на 2 стадии обработки поля. 2 ил.
Способ непрерывного автоматического управления посевным агрегатом и агрегатом защиты растений на различных стадиях обработки сельскохозяйственных полей, заключающийся в том, что управление движением и работой агрегатов по обработке поля рассчитывают с помощью информационно-управляющей системы (ИУС) и осуществляют с помощью бортового компьютера агрегата с навигационной системой, при этом параметры управления агрегатом защиты растений рассчитывают при минимальном значении экологического вреда и энергоресурсных затрат агрегата защиты растений с учетом пространственного положения зон заражения и конфигурации поля, отличающийся тем, что непрерывное управление движением посевного агрегата и агрегата защиты растений рассчитывают с учетом радиуса поворота агрегата при обходе объектов-препятствий (колков) и разворота на границе поля, при этом для управления посевным агрегатом вначале рассчитывают управление движением и работой агрегата защиты растений по обработке поля, а затем рассчитывают точно совпадающее по направлению управление движением и работой посевного агрегата, причем обработку поля осуществляют вначале посевным агрегатом, а затем агрегатом защиты растений.
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ ЗАЩИТЫ РАСТЕНИЙ ПРИ СПУТНИКОВОЙ НАВИГАЦИИ НА СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПОЛЯХ | 2010 |
|
RU2492626C2 |
| Эмбриотом для крупных животных | 1930 |
|
SU27993A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| САМОХОДНЫЙ РОБОТ-ОПРЫСКИВАТЕЛЬ ДЛЯ ОБРАБОТКИ РАСТЕНИЙ ЗЕМЛЯНИКИ И ДРУГИХ НИЗКОРАСТУЩИХ КУЛЬТУР | 2015 |
|
RU2592904C1 |
| Приспособление к кинопроектору для окрашивания изображений на экране | 1932 |
|
SU36172A1 |
| US 6694260 B1, 17.02.2004. | |||

