Изобретение относится к управлению рекуперативным торможением на автотранспортном средстве, в частности, к способу управления рекуперативным торможением транспортного средства, оборудованного двигателем внутреннего сгорания и/или по меньшей мере одним электрическим двигателем.
Изобретение может быть использовано на любом автотранспортном средстве, оборудованном по меньшей мере одним электрическим двигателем и соответствующими средствами накопления энергии, в частности батареями, независимо от того, является ли транспортное средстве строго электрическом или гибридным, т.е. содержащим двигатель внутреннего сгорания, связанный с по меньшей мере одной электрической машиной.
Как правило, функция рекуперативного торможения не связана с педалью тормоза транспортного средства. В этом случае система управления силовой установкой (СУ) управляет усилием торможения, действующим на колеса через тормозные колодки, с целью оптимизации рекуперации энергии. Таким образом, когда водитель нажимает на тормозную педаль, система управления СУ может даже свести на нет усилие, действующее через тормозные колодки (отсутствие рассеяния кинетической энергии), для оптимизации рекуперации энергии электрическим (электрическими) двигателем (двигателями).
В документе FR 2230515 описана система, в которой степень рекуперативного торможения связана со степенью нажатия тормозной педали. В частности, от положения тормозной педали зависит сила тока, обеспечивающая рекуперативное торможение без учета состояния транспортного средства (скорость, состояние зарядки батареи и т.д.). Однако в некоторых случаях желательно изменить ток зарядки, в частности, когда батарея уже находится на высоком уровне зарядки, чтобы избежать ее разрушения.
В документе US 20020030408 раскрыт другой способ управления рекуперативным торможением транспортного средства, модулируемый в зависимости от задаваемого водителем торможения и от соотношения баланса между передним и задним мостами. Вместе с тем, обычная система торможения не связана с этим управлением, что повышает стоимость этой системы. Кроме того, расчет заданного рекуперативного торможения не учитывает торможение двигателем, обеспечивающее замедление движения транспортного средства при ненажатой педали тормоза, что может привести к потере непрерывности при торможении, когда переходят от фазы торможения к фазе отпускания педали. В этих условиях может пострадать удобство вождения.
Таким образом, известные способы не способны оптимизировать управление электрической энергией на транспортном средстве и, следовательно, минимизировать расход топлива в гибридном транспортном средстве или максимально повысить автономность движения электрических транспортных средств.
Задачей изобретения является минимизация энергетических потерь, связанных с торможением, за счет учета рекуперативного торможения при вычислении рабочего режима силовой установки в целом.
Для решения этой задачи предложено вычислять заданное усилие торможения, с которым силовая установки СУ действует на колеса, включая усилие рекуперативного торможения, которое не зависело бы от соотношения между степенью нажатия на педаль тормоза и тормозным усилием, с которым главные тормоза транспортного средства действуют на колеса.
Согласно изобретению, дополнительное тормозное усилие, создаваемое электрическими двигателями в качестве рекуперативного торможения, просто добавляется к тормозному усилию, создаваемому главными тормозами транспортного средства.
Согласно частному варианту выполнения изобретения, заданное усилие торможения, с которьм действует силовая установка СУ на колесо (Fk_заданное_тормож), определяют из соотношения:
Fk_заданное_тормож=Fk_min_0+β(тормож_пед)×(Fk_min_1-Fk_min_0), где:
β - функция положения педали тормоза, область определения которой, например, составляет [0; 1] в интервале [0; 100];
Fk_min_0 - минимальное усилие, которое может обеспечить СУ;
Fk_min_1 - максимальный уровень рекуперативного торможения по абсолютной величине.
Благодаря таким операциям, усилие рекуперативного торможения электрическими машинами добавляется к тормозному усилию рассеянием: если транспортное средство слишком замедляет ход, водитель ослабляет нажатие на педаль тормоза и в меньшей степени задействует систему торможения рассеянием.
Другие особенности и преимущества настоящего изобретения будут более понятны из дальнейшего описания неограничивающего варианта его осуществления со ссылками на прилагаемые чертежи.
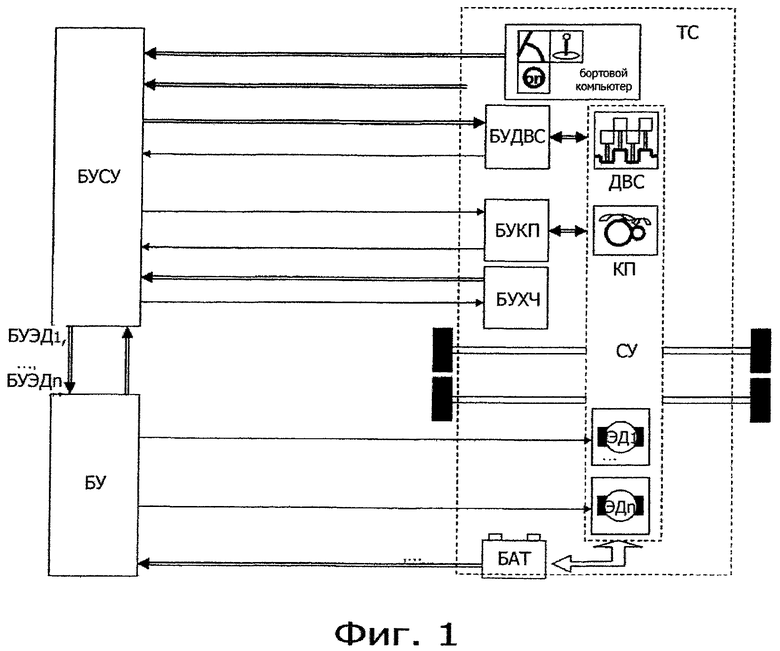
На фиг.1 показан пример выполнения схемы управления гибридным транспортным средством, содержащим двигатель внутреннего сгорания и по меньшей мере один электрический двигатель;
на фиг.2 - кривые минимального и максимального усилия;
на фиг.3 изображена калибровка рекуперативного торможения;
на фиг.4 - дополнение к фиг.3;
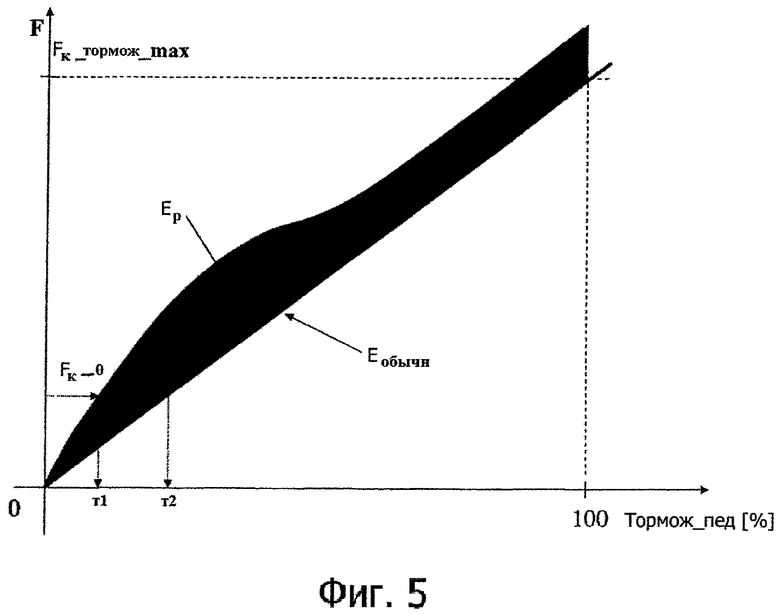
на фиг.5 показан график, иллюстрирующий наложение усилия торможения рассеянием на усилие рекуперативного торможения;
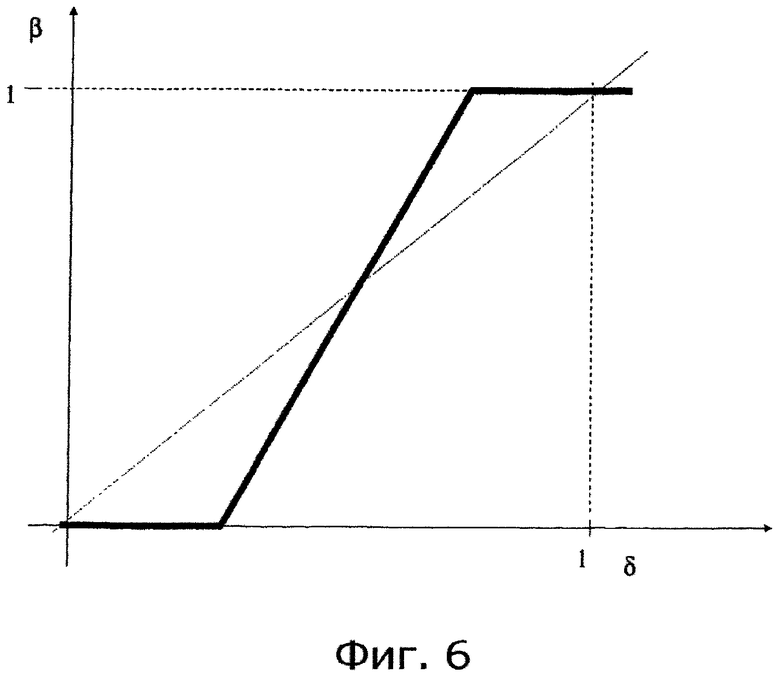
на фиг.6 - вариант осуществления изобретения.
На всех фигурах для описания структуры системы управления произвольно выбрана система отсчета «усилия на колесах - скорость транспортного средства». Такая характеристика позволяет выявить все возможные воздействия на колеса транспортного средства. Понятие усилия на колесах эквивалентно понятию крутящего момента на колесах. На фиг.1 показаны:
- блок управления силовой установкой (БУСУ), в основном предназначенный для выработки заданных значений команд на исполнительный механизм: двигатель внутреннего сгорания (ДВС), коробку передач (КП), ходовую часть и т.д.;
- электротехнический блок управления (ЭБУ), предназначенный для управления всей электротехнической системой (батарея (БАТ), инверторы, электрический (электрические) двигатель (двигатели) (ЭД1-ЭДn)) с целью реализации команд, поступающих от БУСУ;
- блок управления двигателем внутреннего сгорания (БУДВС), предназначенный для управления всеми элементами двигателя (ДВС), необходимыми для реализации команды, поступающей от БУСУ;
- блок управления коробкой передач (БУКП), предназначенный для управления приводами коробки передач (КП), позволяющими реализовать команды БУСУ;
- блок управления ходовой частью (БУХЧ), предназначенный для управления реализацией команд БУСУ.
Блок управления БУСУ интерпретирует действия водителя и преобразует их в команды, понятные для приводов. В общем случае положение педали акселератора конвертируют в задаваемое БУСУ значение усилия двигателя (Fk_заданное) согласно соотношению:
Fk_заданное=Fk_min_0+α(аксел_пед)*(Fk_max-Fk_min_0), где:
Fk_min_0 соответствует огибающей минимальных усилий, которые может создавать СУ;
Fk_max соответствует максимальной огибающей усилий, которые может создавать СУ;
α - функция положения педали акселератора, область определения которой составляет [0; 1] в интервале [0; 100] и которая позволяет, например, калибровать плавность при конвертировании положения педали акселератора.
Для электрического транспортного средства (без двигателя внутреннего сгорания) огибающую Fk_min_0, которая характеризует профиль самоторможения (то есть при отпущенной педали) транспортного средства, можно калибровать с учетом условий электротехнической системы (предельная мощность батареи, минимальный момент, создаваемый электрическим двигателем и т.д.).
Для гибридного транспортного средства (с двигателем внутреннего сгорания) ситуация становится иной, учитывая, что самоторможение может происходить при вращающемся двигателе внутреннего сгорания (например, когда батарея заряжается) или нет (в этом случае функцию торможения двигателем выполняет электрический двигатель). Чтобы гарантировать водителю одинаковое замедление вне зависимости от того, вращается ли двигатель внутреннего сгорания, или он выключен, существует возможность выбора определенной огибающей Fk_min_0, максимально близкой к торможению двигателем внутреннего сгорания. Во время замедления при выключенном двигателе внутреннего сгорания электрический двигатель воспроизводит уровень торможения двигателем двигателя внутреннего сгорания.
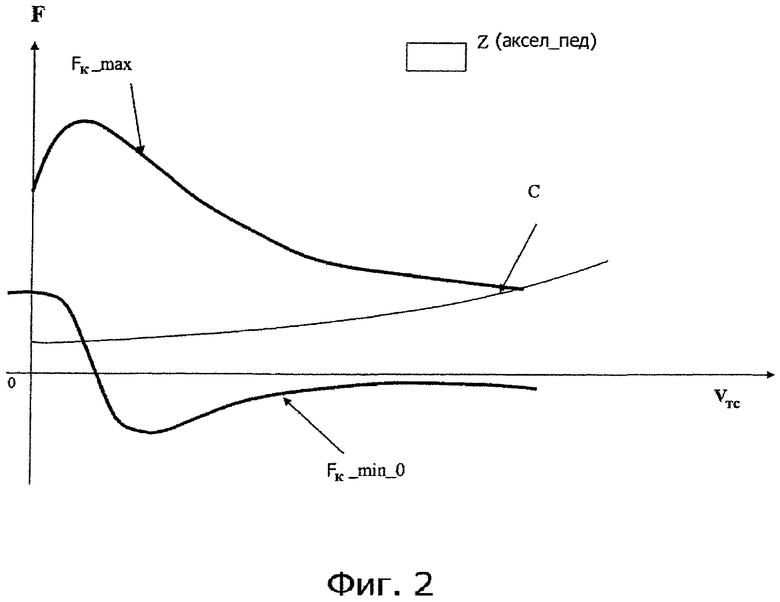
На фиг.2 в системе координат «скорость транспортного средства (Vтс) - усилия на колесах (F)» показана кривая Fk_max (максимальная огибающая усилий, требуемых от СУ) и кривая Fk_min_0 (минимальная огибающая при отпущенной педали). На графике эти две кривые ограничивают зону изменения заданного значения СУ при нажатии на педаль акселератора, Z(аксел_пед). Кривая C сопротивления движению транспортного средства в номинальных условиях (ровная дорога, отсутствие ветра и т.д.) пересекает максимальную огибающую Fk_max в конце зоны изменения заданного значения.
На том же принципе вычисления, что и для заданного значения СУ при движении на тяге (Fk_заданное), основано вычисление заданного значения СУ при торможении (Fk_заданное_тормож):
Fk_заданное_тормож=Fk_min_0+β(тормож_пед)×(Fk_min_1 - Fk_min_0) где:
β - функция положения педали тормоза, область определения которой составляет [0; 1] в интервале [0; 100]; эта функция позволяет калибровать необходимый уровень рекуперативного торможения для данного положения тормозной педали;
Fk_min_1 - максимальный уровень (по абсолютной величине) рекуперативного торможения, которое необходимо сообщить транспортному средству.
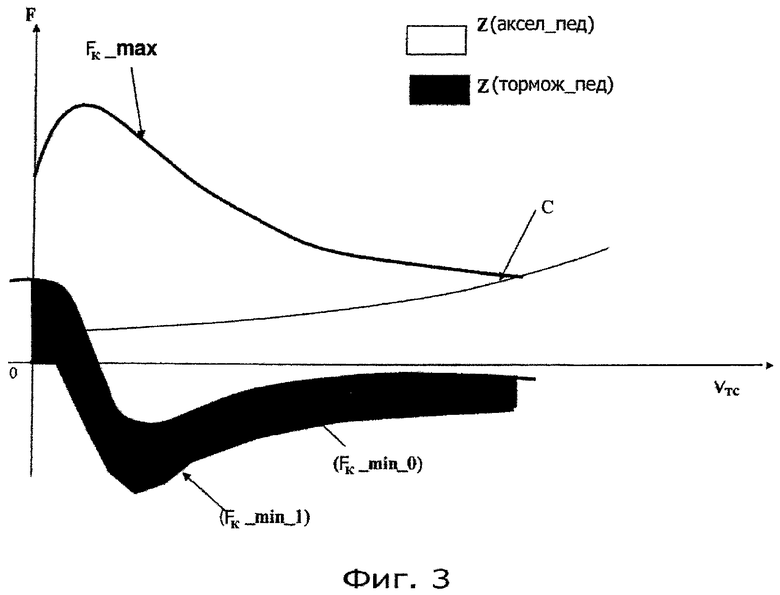
На фиг.3 проиллюстрирован другой аспект изобретения, который относится к калибровке максимального уровня рекуперативного торможения (Fk_min_1). На том же графике, что и показанный на фиг.2, дополнительно показана максимальная огибающая рекуперативного торможения (Fk_min_1), которая вместе с кривой максимальной огибающей при отпущенной педали (Fk_min_0) определяет зону изменения заданного значения СУ при нажатии на тормозную педаль (тормож_пед). Учитывая, что рекуперативное торможение может происходить только тогда, когда это позволяет состояние электротехнической системы транспортного средства (в частности, при отсутствии неисправностей, и когда зарядка батареи не находится на уровне насыщения), уровень рекуперативного торможения ограничивают таким уровнем, при котором для водителя может быть допустимым и его исключение. Это позволяет водителю избежать ощущения неисправности тормозов в отсутствие рекуперативного торможения.
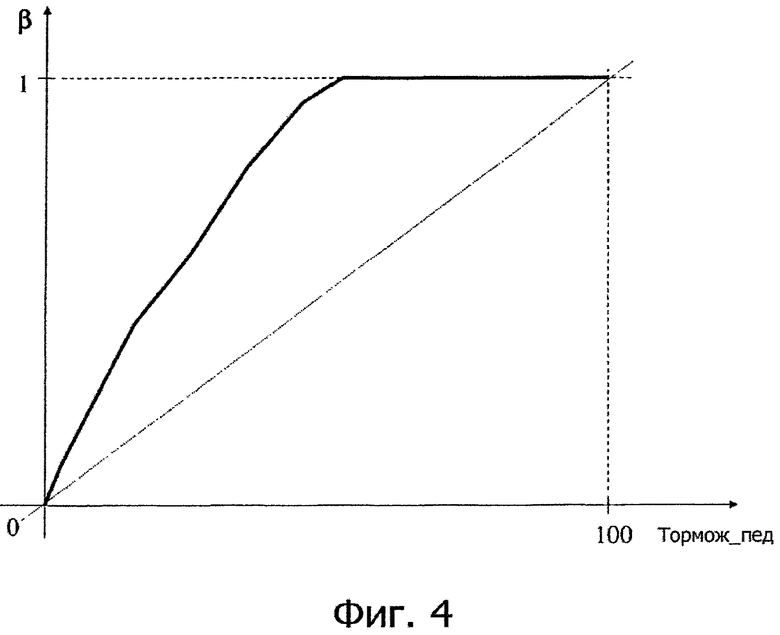
На фиг.4 показан пример калибровки функции положения тормозной педали β=f(тормож_пед). Эта калибровка заключается в том, что функция β достигает насыщения на уровне 1, начиная от промежуточного положения тормозной педали. Это позволяет располагать всем допустимым рекуперативным торможением за пределами определенного нажатия на педаль тормоза.
В общем случае, то есть с учетом задаваемого ускорения или торможения при нажатии на соответствующие педали (аксел_пед, тормож_пед) можно вычислить заданное значение СУ усилия на колесах Fk_заданное в зависимости от положения педали акселератора или тормоза следующим образом:
Fk_заданное (аксел_пед, тормож_пед)=Fk_min_0+α(аксел_пед)×(Fk_max-Fk_min_0)+β(тормож_пед)×(Fk_min_1-Fk_min_0)
Вместе с тем, после вычисления и перед применением это заданное значение подвергают обработке во втором модуле, который его насыщает (в случае необходимости) с учетом электротехнических условий (уровень зарядки батареи и т.д.) и условий ходовой части, чтобы гарантировать устойчивость транспортного средства при любых обстоятельствах.
Вычисленное таким образом заданное значение усилия на колесах включает в себя усилие рекуперативного торможения, но не меняет соотношения между нажатием педали тормоза и усилием торможения, действующим на колеса со стороны главной тормозной системы. Например, в случае гидравлической тормозной системы эта стратегия позволяет сохранять фиксированное соотношение между положением педали тормоза и давлением создаваемым главным тормозным цилиндром.
Как показано на фиг.5, где представлено соотношение между усилием торможения F и положением тормозной педали (тормож_пед), усилие рекуперативного торможения (Ер) просто добавляется к обычному усилию торможения (Eобыч), прикладываемому к главным тормозам транспортного средства. На этой фигуре предполагается соотношение, настроенное на данную скорость транспортного средства, между положением тормозной педали (тормож_пед) и усилием торможения, действующим на тормоза. Таким образом, пока рекуперативное торможение остается возможным, тормоза задействованы в меньшей степени. Действительно, если в данный момент водитель хочет затормозить с амплитудой Fk_0 (фиг.5), это будет соответствовать нажатию тормозной педали до положения т1 (с рекуперативным торможением), тогда как он должен нажимать на ту же педаль до положения т2>т1 без рекуперативного торможения. Таким образом, водитель сам регулирует усилие торможения по необходимому уровню.
Изобретение обладает многими преимуществами. В частности, оно обеспечивает:
- лучшую рекуперацию энергии при торможении для гибридной силовой установки СУ, не оборудованной раздельной системой торможения,
- управление рекуперативным торможением, практически прозрачное для водителя, который будет иметь по существу постоянный уровень торможения независимо от используемого режима работы (тепловой, гибридный или электрический),
- меньшее использование обычной системы торможения при одинаковом заданном замедлении, что позволяет увеличить срок службы этой системы,
- использование функции рекуперативного торможения без дополнительных затрат, связанных с раздельной системой торможения,
- лучшую подзарядку батарей при замедлении движения (в системе без раздельного торможения) при меньшем использовании тормозов.
Кроме этих основных преимуществ, изобретение позволяет легко вводить функцию «pre-crash braking», которая состоит в обнаружении ситуации экстренного торможения, еще до нажатия на педаль тормоза. Для этого достаточно настроить параметр β[=f(тормож_пед)] в зависимости от индикатора экстренного торможения при δ, составляющем от 0 (отсутствие экстренной необходимости) до 1 (неизбежное экстренное торможение), как показано на фиг.6.
Параметр β может одновременно зависеть от положения педали тормоза и от индикатора экстренного торможения, чтобы обеспечивать непрерывность при рекуперативном торможении. Это позволяет уменьшить расстояние до остановки транспортного средства при продолжающемся накоплении энергии.
Необходимо подчеркнуть, что известные раздельные системы рекуперативного торможения во вех случаях являются более дорогими, чем решение согласно настоящему изобретению. Это решение применимо без изменения закономерности, которая связывает положение педали тормоза с тормозным усилием, обеспечиваемым тормозными колодками, и которая отвечает требованию обеспечения безопасности.
Благодаря изобретению, можно применять максимально высокий уровень рекуперативного торможения, разумеется, в пределах мгновенной перегрузки, которую может выдержать водитель. Кроме того, больше нет необходимости изменять заданное значение обычного торможения, связанное с каждым положением тормозной педали. Таким образом, изобретение можно применять на транспортном средстве, оборудованном любым типом тормозов.
Изобретение позволяет рекуперировать часть кинетической энергии, рассеиваемой в фазе торможения, без каких-либо затрат, связанных с введением раздельной системы торможения.
Наконец, как было указано выше, рекуперативное торможение становится полностью прозрачным для водителя, так как заданное значение рекуперативного торможения учитывает только удобство вождения при идеальной непрерывности торможения во всех встречающихся ситуациях при дорожном движении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2173875C1 |
| Система управления скоростью автомобиля с двигателем внутреннего сгорания одной педалью | 2019 |
|
RU2730701C1 |
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2740820C1 |
| ОБЪЕДИНЕННАЯ АВТОМОБИЛЬНАЯ ПЕДАЛЬ АКСЕЛЕРАТОРА И ТОРМОЗА | 2012 |
|
RU2490144C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2575327C1 |
| ОРГАН УПРАВЛЕНИЯ УСКОРЕНИЕМ И ЗАМЕДЛЕНИЕМ АВТОМОБИЛЯ | 2014 |
|
RU2576827C1 |
| Способ и система для замедления транспортного средства | 2017 |
|
RU2717608C2 |
| СИСТЕМА ВСАСЫВАНИЯ ЧАСТИЦ ТОРМОЖЕНИЯ С ОПЕРЕЖЕНИЕМ УПРАВЛЕНИЯ | 2019 |
|
RU2774338C1 |
| СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2017 |
|
RU2741447C1 |
Изобретение относится к способу управления рекуперативным торможением транспортного средства. Способ заключается в том, что вычисляют заданное усилие торможения, с которым главные тормоза транспортного средства действуют на колеса. Заданное усилие торможения, с которым силовая установка действует на колесо, определяют на основании функции положения педали тормоза, минимального усилия, которое может обеспечить силовая установка при невыжатой педали и максимального уровня рекуперативного торможения по абсолютной величине. Технический результат заключается в повышении эффективности рекуперативного торможения. 15 з.п. ф-лы, 6 ил.
1. Способ управления рекуперативным торможением транспортного средства, оборудованного по меньшей мере одним электрическим двигателем или двигателем внутреннего сгорания с по меньшей мере одним электрическим двигателем, характеризующийся тем, что вычисляют заданное усилие торможения, с которым силовая установка (СУ) действует на колесо, включая усилие рекуперативного торможения, не зависящее от соотношения между степенью нажатия на педаль тормоза и тормозным усилием, с которым главные тормоза транспортного средства действуют на колеса, при этом заданное усилие торможения, с которым силовая установка (СУ) действует на колесо (Fк_заданное_тормож), определяют из следующего соотношения:
Fк_заданное__тормож=Fк_min_0+β(тормож_пед)×(Fк_min_1-Fк_min_0),
где β является функцией положения педали тормоза, определяемой в интервале значений [0; 1] по отношению к интервалу значений [0; 100];
Fк_min_0 - минимальное усилие, которое может обеспечить СУ при невыжатой педали;
Fк_min_1 - максимальный уровень рекуперативного торможения по абсолютной величине.
2. Способ управления рекуперативным торможением по п.1, характеризующийся тем, что дополнительное усилие торможения, создаваемое электрическими двигателями в качестве рекуперативного торможения, просто добавляется к усилию торможения, создаваемому главными тормозами транспортного средства.
3. Способ управления рекуперативным торможением по п.1, характеризующийся тем, что минимальное усилие (Fк_min_0) определяют как самое близкое к торможению двигателем внутреннего сгорания.
4. Способ управления рекуперативным торможением по п.2, характеризующийся тем, что минимальное усилие (Fк_min_0) определяют как самое близкое к торможению двигателем внутреннего сгорания.
5. Способ управления рекуперативным торможением по любому из пп.1-4, характеризующийся тем, что максимальный уровень рекуперативного торможения (Fк_min_1) ограничен таким уровнем, при котором его исключение будет приемлемым для водителя.
6. Способ управления рекуперативным торможением по любому из пп.1-4, характеризующийся тем, что калибровка рекуперативного торможения в зависимости от положения тормозной педали (тормож_пед) позволяет располагать всем допустимым рекуперативным торможением за пределами определенного нажатия тормозной педали.
7. Способ управления рекуперативным торможением п.5, характеризующийся тем, что калибровка рекуперативного торможения в зависимости от положения тормозной педали (тормож_пед) позволяет располагать всем допустимым рекуперативным торможением за пределами определенного нажатия тормозной педали.
8. Способ управления рекуперативным торможением по любому из пп.1-4, 7, характеризующийся тем, что заданное значение усилия на колеса Fк_заданное (аксел_пед, тормож_пед) силовой установки в зависимости от положения педали акселератора и педали тормоза или педали тормоза определяют из соотношения:
Fк_заданное (аксел_пед, тормож_пед)=Fк_min_0+α(аксел_пед)×(Fк_max - Fк_min_0)+β(тормож_пед)×(Fк_min_1 - Fк_min_0),
где Fк_min_0 соответствует огибающей минимальных усилий, которые может создавать СУ;
Fк_max соответствует максимальной огибающей усилий, которые может создавать СУ;
α является функцией положения педали акселератора, определяемой в интервале значений [0; 1] по отношению к интервалу значений [0; 100], и которая позволяет, например, калибровать плавность при конвертировании положения педали акселератора.
9. Способ управления рекуперативным торможением по п.5, характеризующийся тем, что заданное значение усилия на колеса Fк_заданное (аксел_пед, тормож_пед) силовой установки в зависимости от положения педали акселератора и педали тормоза или педали тормоза определяют из соотношения:
Fк_заданное (аксел_пед, тормож_пед)=Fк_min_0+α(аксел_пед)×(Fк_max-Fк_min_0)+β(тормож_пед)×(Fк_min_1-Fк_min_0),
где Fк_min_0 соответствует огибающей минимальных усилий, которые может создавать СУ;
Fк_max соответствует максимальной огибающей усилий, которые может создавать СУ;
α является функцией положения педали акселератора, определяемой в интервале значений [0; 1] по отношению к интервалу значений [0; 100], и которая позволяет, например, калибровать плавность при конвертировании положения педали акселератора.
10. Способ управления рекуперативным торможением по п.6, характеризующийся тем, что заданное значение усилия на колеса Fк_заданное (аксел_пед, тормож_пед) силовой установки в зависимости от положения педали акселератора и педали тормоза или педали тормоза определяют из соотношения:
Fк_заданное (аксел_пед, тормож_пед)=Fк_min_0+α(аксел_пед)×(Fк_max-Fк_min_0)+β(тормож_пед)×(Fк_min_1-Fк_min_0),
где Fк_min_0 соответствует огибающей минимальных усилий, которые может создавать СУ;
Fк_max соответствует максимальной огибающей усилий, которые может создавать СУ;
α является функцией положения педали акселератора, определяемой в интервале значений [0; 1] по отношению к интервалу значений [0; 100], и которая позволяет, например, калибровать плавность при конвертировании положения педали акселератора.
11. Способ управления рекуперативным торможением по любому из пп.1-4, 7, 9, 10, характеризующийся тем, что параметр (β=f(тормож_пед)) является функцией индикатора экстренного торможения (δ), составляющего от 0 до 1.
12. Способ управления рекуперативным торможением по п.5, характеризующийся тем, что параметр (β=f(тормож_пед)) является функцией индикатора экстренного торможения (δ), составляющего от 0 до 1.
13. Способ управления рекуперативным торможением по п.6, характеризующийся тем, что параметр (β=f(тормож_пед)) является функцией индикатора экстренного торможения (δ), составляющего от 0 до 1.
14. Способ управления рекуперативным торможением по п.8, характеризующийся тем, что параметр (β=f(тормож_пед)) является функцией индикатора экстренного торможения (δ), составляющего от 0 до 1.
15. Способ управления рекуперативным торможением по п.11, характеризующийся тем, что параметр β одновременно является функцией положения педали тормоза (тормож_пед) и индикатора экстренного торможения (5).
16. Способ управления рекуперативным торможением по любому из пп.12-14, характеризующийся тем, что параметр β одновременно является функцией положения педали тормоза (тормож_пед) и индикатора экстренного торможения (δ).
| JP 2001145205 A, 25.05.2001 | |||
| JP 2007062639 A, 15.03.2007 | |||
| JP 9046821 A, 14.02.1997 | |||
| RU 94021360 A1, 20.03.1997. |

