Область техники
Настоящее изобретение относится к тормозному оборудованию и способу торможения для транспортного средства с сиденьем водителя, направление которого является изменяемым (в дальнейшем в этом документе, называемого "транспортным средством с изменяемым направлением сиденья водителя"), причем транспортное средство включает в себя: кузов транспортного средства со стороны колес, который имеет подвешенные на нем колеса и допускает движение и остановку посредством приведения в движение и торможения этих колес; и кузов транспортного средства со стороны салона, который имеет салон, размещающий сиденье водителя, и монтируется на кузове транспортного средства со стороны колес таким образом, что он допускает поворот, по меньшей мере, в направлениях, приводящих к тому, что сиденье водителя, соответственно, обращено в одну и другую сторону, в направлении движения, кузова транспортного средства со стороны колес. В частности, настоящее изобретение относится к технологии для управления распределением тормозной силы, выполняемого посредством тормозного оборудования.
Уровень техники
В ходе торможения транспортного средства нагрузка на транспортное средство сдвигается в прямом направлении. Этот сдвиг нагрузки увеличивает нагрузку на колеса впереди в прямом направлении (передние колеса) и снижает нагрузку на колеса сзади в прямом направлении (задние колеса). По этой причине, в случае, если идентичная тормозная сила применяется к передним и задним колесам, задние колеса с меньшей нагрузкой на колесо имеют тенденцию блокироваться раньше передних колес с большей нагрузкой на колесо (в дальнейшем в этом документе также называется "упреждающей блокировкой задних колес").
Если передние колеса блокируются первыми, проблематичная нестабильность не возникает в характере движения транспортного средства, поскольку задние колеса сзади в инерционном направлении имеют сцепление с поверхностью дороги. С другой стороны, если задние колеса блокируются первыми, как описано выше, транспортное средство может становиться неспособным создавать достаточное сцепление в направлении ширины транспортного средства. Поскольку передние колеса впереди в инерционном направлении имеют жесткое сцепление с поверхностью дороги, возникает такая проблема, что транспортное средство поворачивается вокруг передних колес, приводя к нестабильности в характере его движения.
Кроме того, поскольку к передним колесам прикладывается большая нагрузка на колесо, применение большей тормозной силы к передним колесам не приводит к их блокировке; тем не менее, поскольку задние колеса имеют тенденцию блокироваться раньше передних колес, как описано выше, тормозная сила передних колес не может быть использована в полном объеме, несмотря на оставшуюся неиспользуемой величину свободной тормозной силы. Это приводит к нехватке тормозной силы транспортного средства в целом и вызывает такую проблему, что водитель не может получать ожидаемое замедление транспортного средства при операции торможения.
С учетом вышеизложенных проблем тормозные силы, в общем, распределяются на передние и задние колеса таким образом, что тормозная сила может быть меньшей в задних колесах, которые имеют тенденцию блокироваться первыми, чем в передних колесах. Таким образом, тенденция упреждающей блокировки задних колес может быть уменьшена, разрешая нестабильность в характере движения транспортного средства, обусловленную упреждающей блокировкой задних колес. В дополнение к этому, уменьшение тенденции упреждающей блокировки задних колес позволяет полностью использовать тормозную силу передних колес с большей нагрузкой на колесо. Следовательно, водитель может получать ожидаемое замедление транспортного средства при операции торможения.
Тем не менее, возникают следующие проблемы, если вышеуказанное управление распределением тормозной силы применяется как есть к случаю движения транспортного средства назад.
В ходе торможения при движении транспортного средства назад нагрузка на транспортное средство сдвигается в обратном направлении. В отличие от предыдущего случая, этот сдвиг нагрузки увеличивает нагрузку на колесо для колес впереди в обратном направлении (задних колес, описанных выше), и снижает нагрузку на колесо для колес сзади в обратном направлении (передних колес, описанных выше). Это создает неиспользуемую, свободную часть в тормозной силе колес впереди в обратном направлении (задних колес) и приводит к тому, что колеса сзади в обратном направлении (передние колеса) имеют тенденцию блокироваться первыми.
Если, несмотря на эту тенденцию, выполняется управление с использованием распределения тормозной силы, идентичного движению вперед, то тормозная сила задается меньшей для колес впереди в обратном направлении (задних колес), чем для колес сзади в обратном направлении (передних колес). Тормозные силы распределяются на передние и задние колеса противоположно тому, как вес сдвигается в транспортном средстве. Соответственно, тормозная сила колес сзади в обратном направлении (передних колес) становится намного превышающей тормозную силу без вышеописанного управления распределением тормозной силы. Это делает проблему тенденции упреждающей блокировки (и, следовательно, нестабильного характера движения) более серьезной. Помимо этого, поскольку тормозная сила колес впереди в обратном направлении (задних колес) не может быть полностью использована, такая проблема, что замедление транспортного средства, которое ожидает водитель, не может получаться, также становится более серьезной.
С учетом таких проблем, возникающих в ходе торможения при движении транспортного средства назад, например, предложен предшествующий уровень техники, к примеру, описанный в PL 1. Согласно этому предшествующему уровню техники, когда торможение выполняется в то время, когда транспортное средство движется назад, рекуперативная тормозная сила электродвигателя прикладывается к колесам впереди в обратном направлении (задним колесам), соответственно увеличивая нагрузку на эти колеса, так что вышеуказанные проблемы, возникающие в ходе торможения в середине обратного движения, могут уменьшаться.
Патентные документы
PL 1. Публикация заявки на патент Японии № 2004-312943
Техническая задача изобретения
Тем не менее, предшествующий уровень техники относится к тормозному оборудованию транспортного средства с сиденьем водителя, направление которого является фиксированным, а не к тормозному оборудованию транспортного средства с изменяемым направлением сиденья водителя.
Кроме того, нельзя ожидать, что предшествующий уровень техники уменьшает вышеуказанные проблемы, кроме тех случаев, когда торможение выполняется только для небольшого требуемого замедления, может получаться большая рекуперативная тормозная сила электродвигателя и транспортное средство имеет небольшое соотношение между высотой центра тяжести транспортного средства и колесной базой и тем самым имеет небольшой сдвиг нагрузки в ходе торможения.
Кроме того, вышеописанное транспортное средство с изменяемым направлением сиденья водителя является транспортным средством, выполненным с возможностью изменения направления сиденья водителя при допущении, что транспортное средство движется в одном и другом направлении (при просмотре со стороны кузова транспортного средства со стороны колес) практически с одинаковой частотой. Таким образом, большое замедление требуется для движения в обоих из этих направлений, и торможение, которое удовлетворяет такому требованию, должно выполняться. Следовательно, применение предшествующего уровня техники к вышеописанному транспортному средству с изменяемым направлением сиденья водителя не приводит к уменьшению вышеуказанных проблем.
Далее подробно описывается причина такого недостатка. Когда требуемое замедление через операцию торможения увеличивается, необходимо применять, к колесам впереди в прямом направлении, тормозную силу, которая является достаточно большой для того, чтобы полностью расходовать нагрузку на колесо, увеличенную посредством сдвига нагрузки. Следовательно, требуются максимальная рекуперативная тормозная сила электродвигателя и максимальная фрикционная тормозная сила.
Тем не менее, если максимальная фрикционная тормозная сила формируется на колесах впереди в прямом направлении, тормозная сила, которая должна применяться к колесам сзади в прямом направлении, становится максимальной в случае движения транспортного средства в противоположном направлении или назад. Следовательно, коэффициент распределения тормозной силы становится большим сзади в прямом направлении. Такое распределение тормозной силы приводит к тому, что колеса сзади в прямом направлении создают большую фрикционную тормозную силу, чем колеса впереди в прямом направлении. Как результат, колеса сзади в прямом направлении с большей вероятностью блокируются, возможно, снижая стабильность характера движения транспортного средства.
В этом отношении фрикционная тормозная сила сзади может быть уменьшена, чтобы обеспечивать стабильность характера движения транспортного средства без блокировки колес сзади в прямом направлении; тем не менее, такое уменьшение также дополнительно уменьшает фрикционную тормозную силу впереди. Таким образом, существует возможность того, что достаточное замедление транспортного средства не может получаться, если транспортное средство не оснащается крупными электродвигателями, допускающими формирование рекуперативных тормозных сил, которые являются достаточно большими для того, чтобы компенсировать уменьшение фрикционной тормозной силы.
Настоящее изобретение разработано с учетом вышеизложенной проблемы. Задачей настоящего изобретения является создание тормозного оборудования описанного транспортного средства с изменяемым направлением сиденья водителя, которое допускает достижение как стабильности в характере движения транспортного средства, так и требуемого замедления независимо от того, движется транспортное средство с сиденьем водителя, обращенным в одну или другую сторону в направлении движения.
Решение задачи
Для решения заданной задачи тормозное оборудование транспортного средства с изменяемым направлением сиденья водителя согласно аспекту настоящего изобретения имеет следующую конфигурацию.
Во-первых, транспортное средство с изменяемым направлением сиденья водителя согласно настоящему изобретению включает в себя: кузов транспортного средства со стороны колес, который имеет подвешенные колеса и допускает движение и остановку посредством приведения в движение и торможения колес; и кузов транспортного средства со стороны салона, который имеет салон, размещающий сиденье водителя, и монтируется на кузове транспортного средства со стороны колес таким образом, что он допускает поворот, по меньшей мере, в направлениях, приводящих к тому, что сиденье водителя, соответственно, обращено в одну и другую сторону, в направлении движения, кузова транспортного средства со стороны колес.
Тормозное оборудование транспортного средства с изменяемым направлением сиденья водителя согласно аспекту настоящего изобретения включает в себя: детектор направления сиденья водителя, выполненный с возможностью определения того, обращено ли сиденье водителя в одну или другую сторону, в направлении движения, кузова транспортного средства со стороны колес; модуль торможения, выполненный с возможностью торможения колес на одной стороне, которые находятся ближе к одной стороне, в направлении движения, кузова транспортного средства со стороны колес, и колес на другой стороне, которые находятся ближе к другой стороне, в направлении движения, кузова транспортного средства со стороны колес, при управлении распределением тормозной силы между тормозными силами колес на одной стороне и колес на другой стороне таким образом, что распределение тормозной силы становится заданным распределением тормозной силы на основе идеальных характеристик распределения тормозной силы; и модуль переключения, выполненный с возможностью изменения заданного распределения тормозной силы в соответствии с направлением сиденья водителя, определяемым посредством детектора направления сиденья водителя.
Преимущества изобретения
Согласно тормозному оборудованию транспортного средства с изменяемым направлением сиденья водителя настоящего изобретения, стабильность в характере движения транспортного средства и требуемое замедление могут достигаться одновременно независимо от того, движется транспортное средство с сиденьем водителя, обращенным в одну или другую сторону в направлении движения. А именно, упреждающая блокировка задних колес может быть уменьшена, и становится возможным применять, к колесам впереди в прямом направлении, тормозную силу, которая является достаточно большой для того, чтобы полностью расходовать нагрузку на колесо, увеличенную посредством сдвига нагрузки.
Краткое описание чертежей
Фиг. 1 - схематичный вид сверху, показывающий пример транспортного средства с изменяемым направлением сиденья водителя, к которому тормозное оборудование настоящего изобретения является применимым;
Фиг. 2 - схематичный вид сбоку транспортного средства с изменяемым направлением сиденья водителя на фиг. 1;
Фиг. 3 - блок-схема, показывающая тормозное оборудование (систему управления давлением тормозной жидкости) согласно первому примеру настоящего изобретения;
Фиг. 4 - блок-схема последовательности операций способа, показывающая программу, чтобы управлять направлением сиденья водителя транспортного средства с изменяемым направлением сиденья водителя, показанного на фиг. 1 и 2;
Фиг. 5 - блок-схема последовательности операций способа, показывающая программу, выполняемую посредством контроллера 12, показанного на фиг. 3, чтобы управлять распределением тормозных сил;
Фиг. 6 - график, показывающий характеристики идеального распределения тормозной силы для каждого направления движения транспортного средства с изменяемым направлением сиденья водителя с прилагаемыми характеристиками распределения тормозной силы 50:50, приведенными для справки;
Фиг. 7(a) - схема, описывающая результат управления распределением тормозной силы, выполняемого посредством тормозного оборудования первого примера;
Фиг. 7(b) - схема, описывающая результат управления распределением тормозной силы в случае применения традиционного принципа к транспортному средству с изменяемым направлением сиденья водителя;
Фиг. 8 - график, показывающий как результат управления распределением тормозной силы посредством тормозного оборудования первого примера, показанного на фиг. 7(a), так и результат управления распределением тормозной силы сравнительного примера, показанного на фиг. 7(b), в форме диаграммы с характеристическими линиями распределения тормозной силы;
Фиг. 9 - блок-схема, показывающая тормозное оборудование (систему управления давлением тормозной жидкости) согласно второму примеру, и соответствует фиг. 3;
Фиг. 10 - блок-схема последовательности операций способа, показывающая программу, выполняемую посредством контроллера 12, показанного на фиг. 9, чтобы управлять распределением тормозных сил, и соответствует фиг. 5;
Фиг. 11 - график, показывающий как результат управления распределением тормозной силы посредством тормозного оборудования второго примера, так и результат управления распределением тормозной силы в случае применения традиционного принципа к транспортному средству с изменяемым направлением сиденья водителя, в форме диаграммы с характеристическими линиями распределения тормозной силы;
Фиг. 12(a) - схема, описывающая результат управления распределением тормозной силы, выполняемого посредством тормозного оборудования первого примера;
Фиг. 12(b) - схема, описывающая результат управления распределением тормозной силы в случае применения традиционного принципа к транспортному средству с изменяемым направлением сиденья водителя;
Фиг. 13 - блок-схема последовательности операций способа, показывающая программу, выполняемую посредством тормозного оборудования согласно третьему примеру настоящего изобретения, чтобы управлять распределением тормозных сил, и соответствует фиг. 5 и 10;
Фиг. 14 - график, показывающий как результат управления распределением тормозной силы посредством тормозного оборудования третьего примера, так и результат управления распределением тормозной силы в случае применения традиционного принципа к транспортному средству с изменяемым направлением сиденья водителя, в форме диаграммы с характеристическими линиями распределения тормозной силы;
Фиг. 15(a) - схема, описывающая результат управления распределением тормозной силы, выполняемого посредством тормозного оборудования третьего примера; и
Фиг. 15(b) - схема, описывающая результат управления распределением тормозной силы в случае применения традиционного принципа к транспортному средству с изменяемым направлением сиденья водителя.
Подробное описание вариантов осуществления
Далее описываются варианты осуществления настоящего изобретения посредством ссылки на чертежи.
Первый пример
Транспортное средство с изменяемым направлением сиденья водителя, к которому применяется тормозное оборудование настоящего изобретения, описывается посредством ссылки на фиг. 1 и 2. Транспортное средство с изменяемым направлением сиденья водителя, показанное на фиг. 1 и 2, состоит из кузова 1 транспортного средства со стороны колес и кузова 2 транспортного средства со стороны салона.
С одной стороны кузова 1 транспортного средства со стороны колес в направлении движения, кузов 1 транспортного средства со стороны колес включает в себя левые и правые колеса 3, подвешенные через соответствующие системы 3a подвески. С другой стороны кузова 1 транспортного средства со стороны колес в направлении движения, кузов 1 транспортного средства со стороны колес включает в себя левые и правые колеса 4, подвешенные через соответствующие системы 4a подвески. Посредством приведения в движение и торможение этих колес 3 и 4, кузов 1 транспортного средства со стороны колес может двигаться и останавливаться.
Кузов 2 транспортного средства со стороны салона включает в себя куполообразный салон 8, размещающий сиденье 5 водителя, модуль 6 приборной панели, расположенный перед сиденьем водителя, и два пассажирских сиденья 7, расположенных под углом за сиденьем водителя. Кузов 2 транспортного средства со стороны салона монтируется на кузове 1 транспортного средства со стороны колес таким образом, что он может поворачиваться вокруг центральной вертикальной линии O кузова 2 транспортного средства со стороны салона, чтобы изменять свое направление.
Шариковый подшипник 9 используется для того, чтобы монтировать кузов 2 транспортного средства со стороны салона таким образом. Подшипник 9 включает в себя наружное кольцо 9o, крепящееся к кузову 1 транспортного средства со стороны колес, внутреннее кольцо 9i, крепящееся к кузову 2 транспортного средства со стороны салона, и шарики 9b, размещенные между наружным и внутренним кольцом 9o и 9i.
Актуатор 11 изменения направления, например электродвигатель, предоставляется в модуле 6 приборной панели, и шестерня 11a, соединенная с выходным валом этого актуатора 11 изменения направления, выполнена с возможностью вращаться. При этой конфигурации, кузов 2 транспортного средства со стороны салона может поворачиваться вокруг центральной вертикальной линии O.
Актуатор 11 изменения направления включает в себя датчик положения вращения (не проиллюстрирован), выполненный с возможностью определения положения вращения кузова 2 транспортного средства со стороны салона. На основе сигнала из датчика положения вращения и сигнала из переключателя команд управления направлением сиденья водителя (не проиллюстрированы), контроллер 12, предоставляемый в модуле 6 приборной панели, управляет приведением в действие актуатора 11 изменения направления. Положение вращения кузова 2 транспортного средства со стороны салона, таким образом, может быть сдвинуто в соответствии с командой, выданной через переключатель команд управления направлением сиденья водителя, либо в положение вращения, в котором сиденье водителя обращено в одну сторону кузова 1 транспортного средства со стороны колес в направлении движения, как показано на фиг. 1 и 2, либо в положение поворота, в котором сиденье водителя обращено в другую сторону кузова 1 транспортного средства со стороны колес в направлении движения, которое является противоположным направлению, которое показывается на фиг. 1 и 2.
Следует отметить, что величина поворота кузова 2 транспортного средства со стороны салона может задаваться равной любой величине при условии, что она позволяет изменять на противоположное направление сиденья водителя. Например, кузов 2 транспортного средства со стороны салона может вращаться только на 180 градусов, но в двух направлениях, или вращаться на 360 градусов.
Далее описываются часть привода колес и часть колесного тормоза колес 3 и 4, которые отвечают за движение и остановку кузова 1 транспортного средства со стороны колес.
Часть привода колес описывается первой. Пары электродвигателей 21 и 22 приводов колес соединяются с ведущими валами колесных пар 3 и 4 соответственно. Электродвигатели 21 и 22 приводов колес монтируются на кузове 1 транспортного средства со стороны колес. Под управлением модулей 24 и 25 управления приводом, каждый из которых сформирован из инвертора и контроллера, соответствующие пары электродвигателей 21 и 22 приводов колес приводятся в действие посредством приема электроэнергии из аккумулятора 23, размещенного под полом в кузове 2 транспортного средства со стороны салона. Транспортное средство с изменяемым направлением сиденья водителя, состоящее из кузова 1 транспортного средства со стороны колес и кузова 2 транспортного средства со стороны салона, может двигаться посредством управления возбуждением электродвигателей 21 и 22 приводов колес таким образом. Следует отметить, что электроэнергия из аккумулятора 23 также используется для того, чтобы приводить в действие актуатор 11 изменения направления, отвечающий за вращение (изменение направления) кузова 2 транспортного средства со стороны салона.
В соответствии с управляющей командой, выданной из руля 26, предоставляемого в модуле 6 приборной панели, контроллер 12, который также предоставляется в модуле 6 приборной панели, управляет колесными парами 3 и 4 через соответствующие актуаторы 27 и 28 руля с управлением по проводам. Транспортное средство с изменяемым направлением сиденья водителя управляется через такую операцию в ходе движения.
Далее описывается часть колесного тормоза. Пары фрикционных тормозных модулей 29 и 31, например, колодочные тормоза или дисковые тормоза, предоставляются в колесных парах 3 и 4 кузова 1 транспортного средства со стороны колес, соответственно. В соответствии с командой торможения от педали 32 тормоза, предоставляемой в модуле 6 приборной панели, контроллер 12, который также предоставляется в модуле 6 приборной панели, гидравлически приводит в действие фрикционные тормозные модули 29 и 31 способом торможения по проводам. Фрикционные тормозные модули 29 и 31 выполняют фрикционное торможение колес 3 и 4 через такую операцию.
Фиг. 3 показывает систему управления давлением тормозной жидкости в качестве примера фрикционной тормозной системы для колес 3 и 4. Главный цилиндр 41 является гидравлическим главным цилиндром для двух магистралей. Когда поршень, включенный в главный цилиндр 41, задвигается посредством линейного актуатора 42, главный цилиндр 41 выводит гидравлическое давление Pm в главном цилиндре, соответствующее величине, на которую поршень задвигается, в одну гидравлическую тормозную магистраль 41a, а также в другую гидравлическую тормозную магистраль 41b.
Одна гидравлическая тормозная магистраль 41a делится на две магистрали и соединяется соответственно с фрикционным тормозным модулем 29 для левого из левого и правого колес 3 и с фрикционным тормозным модулем 31 для правого из левого и правого колес 4.
Другая гидравлическая тормозная магистраль 41b делится на две магистрали и соединяется, соответственно, с фрикционным тормозным модулем 29 для правого из левого и правого колес 3 и с фрикционным тормозным модулем 31 для левого из левого и правого колес 4. Соответственно, получается двухмагистральная гидравлическая тормозная система с диагональным разделением. Для независимого друг от друга управления давлениями тормозной жидкости для левых и правых колес 3, и для независимого друг от друга управления давлениями тормозной жидкости для левых и правых колес 4, модули 43 и 44 управления давлением тормозной жидкости устанавливаются в каждой из гидравлических тормозных магистралей 41a и 41b.
Эти модули 43 и 44 управления давлением тормозной жидкости имеют идентичные спецификации, как и фрикционные тормозные модули 29 и 31. Кроме того, гидравлические тормозные магистрали 41a и 41b также имеют идентичные технические требования.
Контроллер 12 выполнен с возможностью управления приведением в действие модулей 43 и 44 управления давлением тормозной жидкости и ходом линейного актуатора 42.
Контроллер 12 принимает: сигнал из датчика 45 нажатия педали тормоза, выполненного с возможностью определять величину Lb нажатия педали 32 тормоза (требуемое замедление транспортного средства); сигналы из датчиков 46 скорости вращения колес, выполненных с возможностью определять скорости Vw1 и Vw2 вращения левых и правых колес 3, соответственно; и сигналы из датчиков 47 скорости вращения колес, выполненных с возможностью определять скорости Vw3 и Vw4 вращения левых и правых колес 4.
На основе информации, таким образом принимаемой, и некоторой другой внутренней информации, контроллер 12 управляет направлением сиденья водителя и распределением тормозных сил следующим образом.
Управление направлением сиденья водителя
Контроллер 12 управляет направлением сиденья водителя посредством выполнения управляющей программы, показанной на фиг. 4.
На этапе S11 контроллер 12 определяет то, что водитель выдал команду, чтобы изменять направление сиденья 5 водителя (т.е. изменять направление движения), на основе сигнала из переключателя команд управления направлением сиденья водителя. До тех пор, пока команда для изменения направления сиденья 5 водителя не выдается, контроллер 12 не выполняет этап S11 и ожидает команды.
Когда команда для изменения направления сиденья 5 водителя выдается, и этап S11 выполняется, контроллер 12 переходит к этапу S12 и оценивает скорость V транспортного средства посредством использования скоростей Vw1, Vw2, Vw3 и Vw4 вращения соответствующих колес 3 и 4.
На этапе S13, на основе расчетной скорости V транспортного средства, контроллер 12 проверяет то, находится или нет транспортное средство с изменяемым направлением сиденья водителя в остановленном состоянии. При определении, что транспортное средство с изменяемым направлением сиденья водителя находится в состоянии движения, контроллер 12 не изменяет направление сиденья 5 водителя и поддерживает текущее направление. С другой стороны, при определении того, что транспортное средство с изменяемым направлением сиденья водителя находится в остановленном состоянии ("Да" в S13), на этапе S14 контроллер 12 запрещает движение транспортного средства и удерживает транспортное средство в остановленном состоянии. Затем, контроллер 12 управляет изменением направления сиденья водителя следующим образом.
На этапе S15 контроллер 12 определяет текущее направление сиденья 5 водителя на основе положения вращения актуатора 11 изменения направления, который вращает кузов 2 транспортного средства со стороны салона. На следующем этапе S16 контроллер 12 проверяет то, совпадает или нет текущее направление сиденья 5 водителя, таким образом определяемое, с заданным командой направлением сиденья водителя, определяемым на этапе S11.
При определении на этапе S16, что текущее направление сиденья 5 водителя не совпадает с заданным командой направлением сиденья водителя, на этапе S17 контроллер 12 приводит в действие актуатор 11 изменения направления, чтобы вращать кузов 2 транспортного средства со стороны салона вокруг центральной вертикальной линии O.
С другой стороны, если направление сиденья 5 водителя совпадает с заданным командой направлением сиденья водителя, которое требуется водителю, контроллер 12 прекращает приведение в действие актуатора 11 изменения направления. Соответственно, положение вращения кузова 2 транспортного средства со стороны салона может поддерживаться в таком положении вращения, что направление сиденья 5 водителя совпадает с заданным командой направлением сиденья водителя, которое требуется водителю.
На этапе S18 контроллер 12 подавляет запрещение движения транспортного средства, которое задается на этапе S14, и разрешает движение транспортного средства. Соответственно, транспортное средство может двигаться с направлением сиденья 5 водителя, совпадающим с заданным командой направлением сиденья водителя, которое требуется водителю.
Управление распределением тормозной силы
Контроллер 12 перемещает линейный актуатор 42 на величину, соответствующую величине Lb нажатия педали тормоза. Как результат, поршень в главном цилиндре 41 задвигается, так что соответствующее гидравлическое давление Pm в главном цилиндре выводится из главного цилиндра 41. Одновременно, контроллер 12 выполняет управляющую программу, показанную на фиг. 5, чтобы управлять распределением тормозных сил на передние и задние колеса.
На этапе S21 контроллер 12 определяет величину Lb нажатия педали тормоза и состояние транспортного средства. Это "состояние транспортного средства" включает в себя направление сиденья 5 водителя, управляемое так, как описано на фиг. 4, а также скорости Vw1, Vw2, Vw3 и Vw4 вращения соответствующих колес 3 и 4. На следующем этапе S22 контроллер 12 вычисляет целевое распределение тормозной силы между передними и задними колесами на основе идеальных характеристик распределения тормозной силы, указываемых посредством Ao или Bo на фиг. 6, соответствующих текущему направлению сиденья 5 водителя.
Идеальные характеристики распределения тормозной силы, указываемые посредством Ao на фиг. 6, предполагают случай, когда сиденье 5 водителя обращено в одну сторону (сторону A) в направлении движения, и означают такие характеристики распределения тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B, что колеса 3 на стороне A и колеса 4 на стороне B могут блокироваться одновременно. В случае, если сиденье 5 водителя обращено в одну сторону (сторону A) в направлении движения, водитель устанавливает сиденье водителя так, что оно обращено в одну сторону (сторону A) в направлении движения, как показано на фиг. 1-3, и приводит в движение транспортное средство в таком направлении, что колеса 3 выступают в качестве передних колес, а колеса 4 на противоположной стороне (стороне B) выступают в качестве задних колес.
Между тем, идеальные характеристики распределения тормозной силы, указываемые посредством Bo, предполагают случай, когда сиденье 5 водителя обращено в другую сторону (сторону B) в направлении движения, и означают такие характеристики распределения тормозной силы между колесами 4 на стороне B и колесами 3 на стороне A, при которых колеса 4 на стороне B и колеса 3 на стороне A могут блокироваться одновременно. В случае, если сиденье 5 водителя обращено в другую сторону (сторону B) в направлении движения, водитель задает сиденье водителя так, что оно обращено в другую сторону в направлении движения, которое показано как сторона B на фиг. 1-3, и приводит в движение транспортное средство в таком направлении, что колеса 4 выступают в качестве передних колес, а колеса 3 на противоположной стороне (стороне A) выступают в качестве задних колес, т.е. в направлении, противоположном вышеописанному направлению.
Таким образом, каждая из идеальных характеристик Ao и Bo распределения тормозной силы задается так, что: когда нагрузка сдвигается вперед в направлении движения в ходе торможения, тенденция упреждающей блокировки задних колес может исключаться, чтобы поддерживать стабильность характера движения транспортного средства; и требуемое замедление транспортного средства может быть сформировано посредством использования достижимой тормозной силы передних колес, которая увеличивается вместе с увеличением нагрузки на колеса.
Тормозная сила Bf передних колес для колес впереди относительно направления движения и тормозная сила Br задних колес для колес сзади относительно направления движения, которая существует на идеальных характеристических линиях Ao и Bo распределения тормозной силы, может быть вычислена из следующих соответствующих формул (1) и (2):
Bf=(ARP/G){Wfo+W*(ARP/G)*(h/L)} (1)
Br=(ARP/G){Wro-W*(ARP/G)*(h/L)} (2)
- где ARP - требуемое замедление (положительное значение) для транспортного средства, G - гравитационное ускорение, L - колесная база транспортного средства, h - высота центра тяжести транспортного средства, W - вес транспортного средства, Wfo - нагрузка на колесо, применяемая к колесам впереди относительно направления движения в то время, когда транспортное средство находится в стационарном состоянии, и Wro - нагрузка на колесо, прикладываемая к колесам сзади относительно направления движения в то время, когда транспортное средство находится в стационарном состоянии.
Следует отметить, что характеристики распределения тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B, указываемые посредством C на фиг. 6, являются характеристиками распределения тормозной силы 50:50, приведенными просто для справки. Эти характеристики распределения тормозной силы 50:50 могут получаться, например, посредством поддержания модулей 43 и 44 управления давлением тормозной жидкости на фиг. 3 в неактивном состоянии и подачи гидравлических давлений Pm в главном цилиндре, которые являются идентичными для двух гидравлических тормозных магистралей, во фрикционные тормозные модули 29 и 31 как есть. Альтернативно, характеристики распределения тормозной силы 50:50 могут получаться посредством задания модулей 43 и 44 управления давлением тормозной жидкости в идентичное приведенное состояние и задания давлений тормозной жидкости для фрикционных тормозных модулей 29 и 31 равными идентичному уровню. Как и следовало ожидать, идеальные характеристики Ao и Bo распределения тормозной силы являются симметричными относительно линии характеристик распределения тормозной силы 50:50.
На этапе S22 на фиг. 5, чтобы вычислять целевое распределение тормозной силы между передними и задними колесами, контроллер 12 определяет то, на основе текущего направления сиденья водителя, движется транспортное средство с одной стороной (стороной A) или другой стороной (стороной B) в направлении движения в качестве передней.
Если сторона A является передней, контроллер 12 задает, в качестве целевого распределения тормозной силы, распределение тормозной силы, при котором тормозная сила больше в колесах 3 на стороне A (передних колесах), чем в колесах 4 на стороне B (задних колесах), так что оно совпадает или напоминает идеальные характеристики распределения тормозной силы, указываемые посредством Ao на фиг. 6.
Если сторона B является передней, контроллер 12 задает, в качестве целевого распределения тормозной силы, распределение тормозной силы, при котором тормозная сила больше в колесах 4 на стороне B (передних колесах), чем в колесах 3 на стороне A (задних колесах), так что оно совпадает или напоминает идеальные характеристики распределения тормозной силы, указываемые посредством Bo на фиг. 6.
На этапе S23 контроллер 12 определяет текущее направление сиденья 5 водителя на основе положения вращения актуатора 11 изменения направления, который вращает кузов 2 транспортного средства со стороны салона. Таким образом, этап S23 соответствует средству определения направления сиденья водителя и детектору направления сиденья водителя настоящего изобретения.
На следующем этапе S24 на основе определенного текущего направления сиденья 5 водителя контроллер 12 определяет то, является или нет направление движения направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства.
Контроллер 12 переходит к этапу S25 при определении на этапе S24, что направление движения является направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства. На этапе S25, контроллер 12 приводит в действие модули 43 и 44 управления давлением тормозной жидкости на фиг. 3 таким образом, что распределение тормозной силы может становиться целевым распределением тормозной силы, вычисленным на этапе S22, т.е. что тормозная сила может быть больше в колесах 3 на стороне A (передних колесах), чем в колесах 4 на стороне B (задних колесах), так что оно совпадает или напоминает идеальные характеристики распределения тормозной силы, указываемые посредством Ao на фиг. 6.
Контроллер 12 переходит к этапу S26 при определении на этапе S24, что направление движения не является направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства, т.е. при определении, что направление движения является направлением, при котором сторона B кузова 1 транспортного средства со стороны колес является передней для транспортного средства. На этапе S26 контроллер 12 приводит в действие модули 43 и 44 управления давлением тормозной жидкости на фиг. 3 таким образом, что распределение тормозной силы может становиться целевым распределением тормозной силы, вычисленным на этапе S22, т.е. что тормозная сила может быть больше в колесах 4 на стороне B (передних колесах), чем в колесах 3 на стороне A (задних колесах), так что оно совпадает или напоминает идеальные характеристики распределения тормозной силы, указываемые посредством Bo на фиг. 6.
Таким образом, этап S24 соответствует средству переключения и модулю переключения настоящего изобретения. Этапы S25 и S26 соответствуют средству торможения и модулю торможения настоящего изобретения.
Преимущества первого примера
Согласно управлению распределением тормозной силы, описанному выше, можно достигать следующих количественных преимуществ. Здесь, с использованием фиг. 7(a)-8, приводится описание посредством ссылки на случай, когда транспортное средство движется после того, как перед в направлении движения переключается со стороны B на сторону A кузова 1 транспортного средства со стороны колес, как показано на фиг. 7(a) и 7(b).
В случае, если перед в направлении движения переключается со стороны B на сторону A в качестве на фиг. 7(a) и 7(b), распределение тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B переключается с распределения тормозной силы на характеристической линии Bo распределения тормозной силы на фиг. 8, соответствующей идеальной характеристической линии Bo на фиг. 6, на распределение тормозной силы на характеристической линии Ao распределения тормозной силы на фиг. 8, соответствующей идеальной характеристической линии Ao на фиг. 6.
Например, распределение тормозной силы может переключаться на распределение в точке A1 на характеристической линии Ao распределения тормозной силы на фиг. 8. Затем, как показано на фиг. 7(a), тормозная сила в 0,79G формируется в колесах 3 на стороне A, тогда как тормозная сила в 0,21G формируется в колесах 4 на стороне B.
Переключение распределения тормозной силы (с Bo на Ao) задает тормозную силу (0,79G) колес 3 на стороне A превышающей тормозную силу (0,21G) колес 4 на стороне B и, следовательно, изменяет на противоположное количественное отношение между ними. Соответственно, можно не допускать блокировки колес 4 на стороне B раньше колес 3 на стороне A и, следовательно, не допускать нестабильного характера движения, когда сдвиг нагрузки возникает в ходе торможения и увеличивает нагрузку на колесо для колес 3 на стороне A впереди относительно направления движения и снижает нагрузку на колесо для колес 4 на стороне B сзади относительно направления движения.
Помимо этого, поскольку распределение тормозной силы является распределением в точке A1 на характеристической линии Ao распределения тормозной силы, формируемая тормозная сила передних колес 3, которая увеличивается вследствие увеличения нагрузки на колеса, может быть использована в полном объеме. Как показано на фиг. 7(a), можно получать 1,0G (=0,79G+0,21G), что является большим требуемым замедлением ARP.
Следует отметить, что вышеуказанные преимущества также могут получаться, когда направление сиденья водителя изменяется на противоположное, чтобы переключать перед в направлении движения со стороны A на сторону B. Очевидно то, что преимущества могут достигаться аналогично посредством переключения распределения тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B с распределения тормозной силы на характеристической линии Ao распределения тормозной силы на фиг. 8, соответствующей идеальной характеристической линии Ao на фиг. 6, на распределение тормозной силы на характеристической линии Bo распределения тормозной силы на фиг. 8, соответствующей идеальной характеристической линии Bo на фиг. 6.
Между тем, в случае транспортного средства с "фиксированным" направлением сиденья водителя, описанного в PL 1, с сиденьем водителя, направление которого не может быть изменено, колеса 4 на стороне, в которую обращено сиденье водителя (колеса на стороне B), всегда выступают в качестве передних колес. Таким образом, давления тормозной жидкости должны управляться таким образом, что распределение тормозных сил, сформированных посредством фрикционного торможения колес 4 на стороне B и колес 3 на стороне A, всегда может быть распределением тормозной силы на характеристической линии Bo распределения тормозной силы на фиг. 8.
По этой причине, когда торможение выполняется в то время, когда транспортное средство движется назад со стороной A в качестве передней в направлении движения, нагрузка на колесо для колес 3 на стороне A впереди в обратном направлении увеличивается, при этом нагрузка для колес 4 на стороне B сзади в обратном направлении снижается. Несмотря на это, распределение тормозной силы остается как распределение, действующее противоположным способом, т.е. распределение, при котором тормозная сила больше в колесах 4 на стороне B, чем в колесах 3 на стороне A. Следовательно, такая проблема, что колеса 4 на стороне B имеют тенденцию блокироваться раньше колес 3 на стороне A (и, следовательно, приводят к нестабильному характеру движения), становится более серьезной, чем в случае отсутствия выполнения управление распределением тормозной силы согласно характеристикам Bo. В дополнение к этому, поскольку формируемая тормозная сила колес 3 на стороне A не может быть полностью использована, проблема неспособности достигать ожидаемого замедления транспортного средства также становится более серьезной.
С учетом этого ниже предоставляется описание для сравнительного примера первого примера, который использует вышеуказанную технологию, предложенную и описанную в PL 1. В этом сравнительном примере первого примера, описано распределение тормозной силы в случае, когда транспортное средство со стороной A в качестве передней в направления движения тормозит при движении, колеса 3 на стороне A, выступающие в качестве колес впереди относительно направления движения, принимают рекуперативную тормозную силу электродвигателя, соответствующую увеличению нагрузки на колеса 3 на стороне A.
Рассмотрим фрикционное торможение в точке B1 на характеристической линии Bo распределения тормозной силы на фиг. 8. В точке B1 тормозная сила на колесах 3 на стороне A составляет 0,1G, а тормозная сила на колесах 4 на стороне B составляет 0,18G. Один признак вышеуказанной технологии, предложенной и описанной в PL 1, состоит в том, чтобы применять, к колесам 3 на стороне A, рекуперативную тормозную силу электродвигателя, соответствующую увеличению нагрузки на колеса 3 на стороне A, которое возникает вместе с фрикционным торможением. В общем, для четырехколесных электромобилей с приводом от электродвигателя, формируемая рекуперативная тормозная сила на стороне A или на стороне B может иметь значение самое большее в рамках 0,4G.
С учетом стабильности характера движения транспортного средства распределение тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B задается так, что оно является или напоминает распределение на идеальной характеристической линии Ao распределения тормозной силы. Тем не менее, как показано на фиг. 8, тормозная сила колес 3 на стороне A может быть увеличена с 0,1G только приблизительно до 0,5G в точке A2 на идеальной характеристической линии Ao распределения тормозной силы вследствие максимальной рекуперативной тормозной силы в 0,4G.
Как результат, тормозная сила посредством колес 3 на стороне A составляет 0,5G, и тормозная сила посредством колес 4 на стороне B составляет 0,18G, как показано на фиг. 7(b). Это распределение тормозной силы существует на характеристической линии Ao распределения тормозной силы, тем самым предотвращая упреждающую блокировку колес 4 на стороне B (и, следовательно, нестабильный характер движения). Тем не менее, достижимое замедление ARP транспортного средства составляет только приблизительно 0,68G, что является суммой тормозной силы в 0,5G колес 3 на стороне A и тормозной силы в 0,18G колес 4 на стороне B.
Напротив, согласно первому примеру, когда перед в направлении движения переключается со стороны B на сторону A или со стороны A на сторону B, распределение тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B переключается на такое распределение тормозной силы, при котором тормозная сила больше в колесах впереди относительно направления движения, чем в колесах сзади относительно направления движения. Таким образом, можно не допускать блокировки задних колес раньше передних колес и, следовательно, не допускать нестабильного характера движения, когда сдвиг нагрузки возникает в ходе торможения и увеличивает нагрузку на колесо для колес впереди относительно направления движения и снижает нагрузку на колесо для колес сзади относительно направления движения. Помимо этого, формируемая тормозная сила передних колес, которая увеличивается вследствие увеличения нагрузки на колеса, может быть использована в полном объеме. Соответственно, можно получать большое замедление ARP транспортного средства, которое требуется водителю.
Следует отметить, что как в случае этого примера, модули 43 и 44 управления давлением тормозной жидкости имеют идентичные технические требования, как и фрикционные тормозные модули 29 и 31. Кроме того, также гидравлические тормозные магистрали 41a и 41b имеют идентичные технические требования. Таким образом, система управления давлением жидкости колеса 3 на стороне A и система управления давлением жидкости колеса 4 на стороне B формируются с одинаковыми техническими требованиями. Это позволяет достигать вышеуказанных преимуществ посредством простого переключения распределения тормозной силы при достижении простой конфигурации тормозной системы.
Между тем, транспортное средство с изменяемым направлением сиденья водителя предпочтительно является транспортным средством, передняя и задняя части которого в направлении движения сохраняют идентичное распределение веса, даже если направление сиденья водителя переключается. Применение тормозного оборудования по первому примеру к такому транспортному средству с изменяемым направлением сиденья водителя дает возможность простой конфигурации параметров управления и т.п. при достижении вышеуказанных преимуществ.
Второй пример
Фиг. 9 и 10 показывает тормозное оборудование согласно второму примеру. Фиг. 9 показывает систему управления давлением тормозной жидкости, соответствующую фиг. 3; и фиг. 10 является блок-схемой последовательности операций способа, показывающей программу, чтобы управлять распределением тормозных сил, и соответствует фиг. 5. Транспортное средство с изменяемым направлением сиденья водителя второго примера имеет конфигурацию, аналогичную конфигурации, показанной на фиг. 1 и 2. На фиг. 9 компоненты, идентичные компонентам на фиг. 1 и 2, обозначаются посредством идентичных ссылок с номерами, и их описание опускается.
Как показано на фиг. 9, чтобы достигать целевого распределения тормозной силы и требуемого замедления ARP транспортного средства, торможение транспортного средства всегда выполняется через совместное управление фрикционным торможением с использованием главного цилиндра 41 и тормозных модулей 29 и 31, а также рекуперативным торможением с использованием электродвигателей 21 и 22 приводов колес.
Чтобы выполнять такое управление, модули 43 и 44 управления давлением тормозной жидкости на фиг. 3 исключаются из гидравлических тормозных магистралей 41a и 41b. Таким образом, гидравлические давления Pm в главном цилиндре, которые являются идентичными для гидравлических тормозных магистралей 41a и 41b, подаются во фрикционные тормозные модули 29, и 31 как есть. Фрикционная тормозная сила колес 3 на стороне A, следовательно, всегда равна фрикционной тормозной силе колес 4 на стороне B. Таким образом, в отношении фрикционного торможения, характеристики распределения тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B выглядят так, как указано посредством C на фиг. 11, т.е. как характеристики распределения тормозной силы 50:50, как в случае C на фиг. 6.
Во втором примере рекуперативное торможение посредством электродвигателей 21 и 22 приводов колес управляется совместно с управлением фрикционным торможением согласно характеристической линии C распределения тормозной силы, так что могут достигаться целевое распределение тормозной силы и требуемое замедление ARP транспортного средства. Для этого контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 21 и 22 приводов колес так, что они формируют электрические мощности, соответствующие определенной рекуперативной тормозной силе, так что электродвигатели 21 и 22 приводов колес могут работать в качестве генераторов. Наоборот, контроллер 12 может выдавать команду, чтобы назначать нагрузки электродвигателям 21 и 22 приводов колес, чтобы приводить их в действие на величины, соответствующие требуемой мощности возбуждения, так что электродвигатели 21 и 22 приводов колес могут работать в качестве электродвигателей.
Следует отметить, что управление рекуперативной тормозной силой посредством электродвигателей 21 и 22 приводов колес имеет более высокую чувствительность, чем управление фрикционной тормозной силой, которое является гидравлическим управлением; поэтому, тормозное оборудование второго примера превосходит тормозное оборудование вышеуказанного первого примера с точки зрения чувствительности к управлению.
Контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 21 и 22 приводов колес так, что они формируют электрические мощности одновременно с выполнением управления ходом линейного актуатора 42.
Для этого контроллер 12 принимает сигнал из датчика 45 нажатия педали тормоза, выполненного с возможностью определения величины Lb нажатия педали 32 тормоза (требуемое замедление транспортного средства), и сигналы из датчиков частоты вращения электродвигателя (не проиллюстрированы), включенных в электродвигатели 21 и 22 приводов колес и выполненных с возможностью определять их частоты Vm вращения.
На основе информации, таким образом принимаемой, и некоторой другой внутренней информации, контроллер 12 выполняет управление направлением сиденья водителя и управление распределением тормозной силы. Первое (или управление направлением сиденья водителя) является идентичным управлению, описанному на фиг. 4, и, следовательно, его описание опускается в данном документе.
Управление распределением тормозной силы
Контроллер 12 перемещает линейный актуатор 42 на величину, соответствующую величине Lb нажатия педали тормоза, чтобы тем самым выводить соответствующее гидравлическое давление Pm в главном цилиндре из главного цилиндра 41. Как результат, колеса 3 и 4 подвергаются фрикционному торможению так, что оно следует характеристической линии C распределения тормозной силы на фиг. 11. Одновременно, контроллер 12 выполняет управляющую программу, показанную на фиг. 10, чтобы управлять распределением тормозной силы.
На этапе S31 на фиг. 10 контроллер 12 определяет величину Lb нажатия педали тормоза и состояние транспортного средства. Это "состояние транспортного средства" включает в себя направление сиденья водителя, управляемое, как описано на фиг. 4, а также частоты Vm вращения соответствующих электродвигателей 21 и 22 приводов колес.
На следующем этапе S32 контроллер 12 вычисляет целевое распределение тормозной силы между передними и задними колесами на основе идеальных характеристик распределения тормозной силы, указываемых посредством Ao или Bo на фиг. 6, соответствующих текущему направлению сиденья водителя.
На этапе S32, чтобы вычислять целевое распределение тормозной силы между передними и задними колесами, контроллер 12 определяет то, на основе текущего направления сиденья водителя, движется транспортное средство с одной стороной (стороной A) или другой стороной (стороной B) в направлении движения в качестве передней.
Если сторона A является передней, контроллер 12 задает, в качестве целевого распределения тормозной силы, распределение тормозной силы, при котором тормозная сила больше в колесах 3 на стороне A (передних колесах), чем в колесах 4 на стороне B (задних колесах), так что оно совпадает или напоминает идеальные характеристики распределения тормозной силы, указываемые посредством Ao на фиг. 6.
Если сторона B является передней, контроллер 12 задает, в качестве целевого распределения тормозной силы, распределение тормозной силы, при котором тормозная сила больше в колесах 4 на стороне B (передних колесах), чем в колесах 3 на стороне A (задних колесах), так что оно совпадает или напоминает идеальные характеристики распределения тормозной силы, указываемые посредством Bo на фиг. 6.
На этапе S33 контроллер 12 определяет текущее направление сиденья 5 водителя на основе положения вращения актуатора 11 изменения направления, который вращает кузов 2 транспортного средства со стороны салона.
Таким образом, этап S33 соответствует средству определения направления сиденья водителя и детектору направления сиденья водителя настоящего изобретения.
На следующем этапе S34 на основе определенного текущего направления сиденья 5 водителя контроллер 12 определяет то, является или нет направление движения направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства.
Контроллер 12 переходит к этапу S35 при определении на этапе S34, что направление движения является направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства. На этапе S35 контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 21 приводов колес для колес 3 на стороне A так, что они формируют электрические мощности, эквивалентные определенной рекуперативной тормозной силе, и применяет рекуперативную тормозную силу к колесам 3 на стороне A (передним колесам). Как результат, распределение тормозной силы между передними и задними колесами становится целевым распределением тормозной силы, вычисленным на этапе S32. Другими словами, тормозная сила становится большей в колесах 3 на стороне A (передних колесах), чем в колесах 4 на стороне B (задних колесах), так что распределение тормозной силы может совпадать или напоминать идеальные характеристики распределения тормозной силы, указываемые посредством Ao на фиг. 6. Здесь, тормозная сила колес 3 на стороне A (передних колес) является суммой фрикционной тормозной силы, описанной выше, и рекуперативной тормозной силы.
Между тем, контроллер 12 сравнивает целевую рекуперативную тормозную силу, которая должна применяться к колесам 3 на стороне A (передним колесам), с максимальной рекуперативной тормозной силой, которую могут формировать электродвигатели 21 приводов колес. Если целевая рекуперативная тормозная сила превышает максимальную рекуперативную тормозную силу, контроллер 12 задает рекуперативную тормозную силу, которая должна применяться к колесам 3 на стороне A (передним колесам), равной этой формируемой максимальной рекуперативной тормозной силе, и выдает команду, чтобы назначать нагрузки электродвигателям 21 приводов колес для колес 3 на стороне A так, что они формируют электрические мощности, эквивалентные формируемой максимальной рекуперативной тормозной силе.
Контроллер 12 переходит к этапу S36 при определении на этапе S34, что направление движения не является направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства, т.е. при определении, что направление движения является направлением, при котором сторона B кузова 1 транспортного средства со стороны колес является передней для транспортного средства. На этапе S36, контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 22 приводов колес для колес 4 на стороне B так, что они формируют электрические мощности, эквивалентные определенной рекуперативной тормозной силе, и применяет рекуперативную тормозную силу к колесам 4 на стороне B (передним колесам). Как результат, распределение тормозной силы между передними и задними колесами становится целевым распределением тормозной силы, вычисленным на этапе S32. Другими словами, тормозная сила больше в колесах 4 на стороне B (передних колесах), чем в колесах 3 на стороне A (задних колесах), так что распределение тормозной силы может совпадать или напоминать идеальные характеристики распределения тормозной силы, указываемые посредством Bo на фиг. 6. Тормозная сила колес 4 на стороне B (передних колес) является суммой фрикционной тормозной силы, описанной выше, и рекуперативной тормозной силы.
Между тем контроллер 12 сравнивает целевую рекуперативную тормозную силу, которая должна применяться к колесам 4 на стороне B (передним колесам), с максимальной рекуперативной тормозной силой, которую могут формировать электродвигатели 22 приводов колес. Если целевая рекуперативная тормозная сила превышает максимальную рекуперативную тормозную силу, контроллер 12 задает рекуперативную тормозную силу, которая должна применяться к колесам 4 на стороне B (передним колесам), равной формируемой максимальной рекуперативной тормозной силе и выдает команду, чтобы назначать нагрузки электродвигателям 22 приводов колес для колес 4 на стороне B (передних колес) так, что они формируют электрические мощности, эквивалентные формируемой максимальной рекуперативной тормозной силе.
Таким образом, этап S34 соответствует средству переключения и модулю переключения настоящего изобретения. Этапы S35 и S36 соответствуют средству торможения и модулю торможения настоящего изобретения.
Преимущества второго примера
Согласно управлению распределением тормозной силы второго примера, описанного выше, можно достигать следующих преимуществ.
В частности, фрикционные тормозные силы, т.е. давления тормозной жидкости больше не должны управляться, и преимущества, идентичные преимуществам первого примера, могут получаться посредством управления нагрузками, которые должны назначаться электродвигателям 21 и 22 для формирования электроэнергии, т.е. посредством управления рекуперативными тормозными силами электродвигателей 21 и 22. Соответственно система может быть упрощена. Кроме того, поскольку управление рекуперативной тормозной силой имеет большую чувствительность и точность, чем управление фрикционной тормозной силой, чувствительность управления распределением тормозной силы и точность его управления может повышаться радикально.
Кроме того, согласно управлению распределением тормозной силы второго примера, можно достигать следующих количественных преимуществ в случае, если транспортное средство движется после того, как его перед в направлении движения переключается со стороны B на сторону A кузова 1 транспортного средства со стороны колес, как показано на фиг. 12(a) и 12(b). Такие преимущества описываются с использованием фиг. 11-12(b).
В частности, когда перед в направлении движения переключается со стороны B на сторону A, как показано на фиг. 12(a) и 12(b), распределение тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B переключается с распределения тормозной силы на характеристической линии распределения тормозной силы (опускаемой на фиг. 11), соответствующей Bo на фиг. 6, на распределение тормозной силы на характеристической линии Ao распределения тормозной силы на фиг. 11, соответствующей Ao на фиг. 6.
Рассмотрим случай торможения, например, в точке C1 (фрикционная тормозная сила колес 3 на стороне A=0,205G; фрикционная тормозная сила колес 4 на стороне B=0,205G) на характеристической линии C распределения фрикционной тормозной силы. В этом случае максимальная рекуперативная тормозная сила, например, в 0,4G добавляется к фрикционной тормозной силе (0,205G) колес 3 на стороне A в точке C1 (этап S35), так что распределение тормозной силы задается равным точке A1 на характеристической линии Ao распределения тормозной силы на фиг. 11. Затем распределение тормозной силы переключается таким образом, что тормозная сила в 0,605G формируется в колесах 3 на стороне A, и тормозная сила в 0,205G формируется в колесах 4 на стороне B, как показано на фиг. 12(a).
Переключение распределения тормозной силы на характеристическую линию Ao распределения тормозной силы задает тормозную силу (0,605G) колес 3 на стороне A превышающей тормозную силу (0,205G) колес 4 на стороне B и, следовательно, изменяет на противоположное количественное отношение между ними.
Соответственно можно не допускать блокировки колес 4 на стороне B раньше колес 3 на стороне A и, следовательно, не допускать нестабильного характера движения, когда сдвиг нагрузки возникает в ходе торможения и увеличивает нагрузку на колесо для колес 3 на стороне A впереди относительно направления движения и снижает нагрузку на колесо для колес 4 на стороне B сзади относительно направления движения.
Помимо этого, поскольку распределение тормозной силы является распределением в точке A1 на идеальной характеристической линии Ao распределения тормозной силы, формируемая тормозная сила передних колес 3, которая увеличивается вследствие увеличения нагрузки на колеса, может быть использована в полном объеме. Как показано на фиг. 12(a), можно получать 0,605G+0,205G=0,810G, что является большим замедлением ARP транспортного средства.
Следует отметить, что вышеуказанные преимущества также могут получаться, когда направление сиденья водителя изменяется на противоположное, чтобы переключать перед в направлении движения со стороны A на сторону B. Очевидно то, что преимущества могут достигаться аналогично посредством переключения распределения тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B с распределения тормозной силы на характеристической линии Ao распределения тормозной силы на фиг. 11, соответствующей идеальной характеристической линии Ao на фиг. 6, на распределение тормозной силы на характеристической линии распределения тормозной силы (опущено на фиг. 11), соответствующей идеальной характеристической линии Bo на фиг. 6.
Между тем, рассмотрим случай, когда вышеуказанная технология, предложенная и описанная в PL 1, используется, и рекуперативная тормозная сила электродвигателя, которая соответствует увеличению нагрузки на колеса 3 на стороне A, выступающих в качестве колес впереди относительно направления движения, применяется к колесам 3 в ходе торможения в то время, когда транспортное средство движется со стороной A в качестве передней в направлении движения (это упоминается как сравнительный пример вышеописанного второго примера). В этом случае, распределение тормозной силы может становиться распределением тормозной силы в точке A2 (фрикционная тормозная сила колес 3 на стороне A=0,5G; фрикционная тормозная сила колес 4 на стороне B=0,18G) на характеристической линии Ao распределения тормозной силы на фиг. 11, как упомянуто выше на фиг. 8.
Как результат, как показано на фиг. 12(b), тормозная сила посредством колес 3 на стороне A составляет 0,5G, и тормозная сила посредством колес 4 на стороне B составляет 0,18G. Поскольку это распределение тормозной силы существует на идеальной характеристической линии Ao распределения тормозной силы, упреждающая блокировка колес 4 на стороне B (и, следовательно, нестабильный характер движения) может предотвращаться.
Тем не менее, достижимое замедление ARP транспортного средства составляет только приблизительно 0,68G, что является суммой тормозной силы в 0,5G колес 3 на стороне A и тормозной силы в 0,18G колес 4 на стороне B.
Напротив, согласно второму примеру, как показано на фиг. 12(a) и 12(b), когда перед в направлении движения переключается со стороны B на сторону A или со стороны A на сторону B, распределение тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B переключается на такое распределение тормозной силы, при котором тормозная сила может быть большей в колесах впереди относительно направления движения, чем в колесах сзади относительно направления движения, посредством добавления рекуперативной тормозной силы.
Соответственно можно не допускать блокировки задних колес раньше передних колес и, следовательно, не допускать нестабильного характера движения, когда сдвиг нагрузки возникает в ходе торможения и увеличивает нагрузку на колесо для колес впереди относительно направления движения и снижает нагрузку на колесо для колес сзади относительно направления движения.
Помимо этого большое замедление ARP транспортного средства может быть сформировано посредством использования сформированной тормозной силы передних колес, которая увеличивается вследствие увеличения нагрузки на колеса, в максимально возможной степени, хотя оно может не быть таким большим, как в первом примере.
Следует отметить, что, как очевидно из вышеуказанных формул (1) и (2), замедление ARP транспортного средства во втором примере может быть таким большим, как в первом примере, даже когда второй пример должен применяться к транспортному средству с изменяемым направлением сиденья водителя, центр тяжести которого является низким (высота h центра тяжести транспортного средства, описанная выше, является небольшой), и колесная база L которого, описанная выше, имеет большую длину.
Третий пример
Фиг. 13 является блок-схемой последовательности операций способа, показывающей программу, чтобы управлять распределением тормозных сил тормозного оборудования согласно третьему примеру, и соответствует фиг. 5 и 10.
В третьем примере используется идентичное транспортное средство с изменяемым направлением сиденья водителя, описанное выше на фиг. 1 и 2, и целевое распределение тормозной силы и требуемое замедление достигаются посредством использования идентичной тормозной системы транспортного средства, описанной выше, на фиг. 9, т.е. посредством совместного управления фрикционным торможением с помощью главного цилиндра 41 и тормозных модулей 29 и 31, а также рекуперативным торможением с помощью электродвигателей 21 и 22 приводов колес.
В этой связи контроллер 12 в третьем примере, показанном на фиг. 9 выполнен с возможностью осуществления управления направлением сиденья водителя и управления распределением тормозной силы. Тем не менее, первое (или управление направлением сиденья водителя) является идентичным управлению, описанному на фиг. 4, и, следовательно, его описание опускается в данном документе.
Далее, посредством ссылки на фиг. 14-15(b), предоставляется описание только для управления распределением тормозной силы, которое контроллер 12 на фиг. 9 выполняет в соответствии с управляющей программой на фиг. 13.
Контроллер 12 согласно фиг. 9 перемещает линейный актуатор 42 для приведения в действие главного цилиндра на величину, соответствующую величине Lb нажатия педали тормоза, чтобы тем самым выводить соответствующее гидравлическое давление Pm в главном цилиндре из главного цилиндра 41. Как результат, колеса 3 и 4 подвергаются фрикционному торможению так, что оно следует характеристической линии C распределения тормозной силы на фиг. 14. Одновременно, контроллер 12 выполняет управляющую программу, показанную на фиг. 13, чтобы управлять распределением тормозной силы.
На этапе S41 на фиг. 13 контроллер 12 определяет величину Lb нажатия педали тормоза и состояние транспортного средства (направление сиденья водителя, управляемое так, как описано на фиг. 4, а также частоты Vm вращения соответствующих электродвигателей 21 и 22 приводов колес).
На следующем этапе S42 контроллер 12 вычисляет целевое распределение тормозной силы между передними и задними колесами на основе идеальных характеристик распределения тормозной силы, указываемых посредством Ao или Bo на фиг. 6, соответствующих текущему направлению сиденья водителя.
На этапе S42, чтобы вычислять целевое распределение тормозной силы между передними и задними колесами, контроллер 12 определяет то, на основе текущего направления сиденья водителя, движется транспортное средство с одной стороной (стороной A) или другой стороной (стороной B) в направлении движения в качестве передней.
Если сторона A является передней, контроллер 12 задает в качестве целевого распределения тормозной силы распределение тормозной силы, при котором тормозная сила больше в колесах 3 на стороне A (передних колесах), чем в колесах 4 на стороне B (задних колесах), так что оно совпадает или напоминает идеальные характеристики распределения тормозной силы, указываемые посредством Ao на фиг. 6.
Если сторона B является передней, контроллер 12 задает, в качестве целевого распределения тормозной силы, распределение тормозной силы, при котором тормозная сила больше в колесах 4 на стороне B (передних колесах), чем в колесах 3 на стороне A (задних колесах), так что оно совпадает или напоминает идеальные характеристики распределения тормозной силы, указываемые посредством Bo на фиг. 6.
На этапе S43 контроллер 12 оценивает требуемое замедление ARP транспортного средства на основе величины Lb нажатия педали тормоза и частот Vm вращения соответствующих электродвигателей 21 и 22 приводов колес. Посредством использования требуемого замедления ARP транспортного средства контроллер 12 затем вычисляет и оценивает фрикционную тормозную силу Bbrake следующим образом.
Чтобы вычислять фрикционную тормозную силу Bbrake, требуемое замедление ARP транспортного средства сначала подставляется в вышеуказанную формулу (1). Тем самым целевая тормозная сила Bf передних колес, которая существует на идеальной характеристической линии Ao (Bo) распределения тормозной силы на фиг. 6 и используется для достижения требуемого замедления ARP транспортного средства, вычисляется для колес впереди относительно направления движения. Затем, из этой целевой тормозной силы Bf передних колес вычитается максимальная рекуперативная тормозная сила Brnfmax, которую могут формировать электродвигатели 21 или 22 приводов колес для колес впереди относительно направления движения, посредством чего фрикционная тормозная сила Bbrake впереди относительно направления движения вычисляется.
Далее описывается то, как вычислять вышеописанную фрикционную тормозную силу Bbrake, с использованием случая, когда сторона A кузова 1 транспортного средства со стороны колес является передней в направлении движения, как показано на фиг. 15(a) и 15(b).
Во-первых, требуемое замедление ARP транспортного средства подставляется в вышеуказанную формулу (1). Тем самым, целевая тормозная сила Bf передних колес (например, в 0,79G в точке A1 на фиг. 14), которая существует на идеальной характеристической линии Ao распределения тормозной силы на фиг. 14 (идентичной идеальной характеристической линии Ao распределения тормозной силы на фиг. 6) и используется для достижения требуемого замедления ARP транспортного средства, вычисляется для колес впереди относительно направления движения (колес 3 на стороне A). Затем, из этой целевой тормозной силы Bf передних колес вычитается максимальная рекуперативная тормозная сила Brnfmax (0,4G на фиг. 14), которую могут формировать электродвигатели 21 приводов колес для колес 3 на стороне A, посредством чего вычисляется фрикционная тормозная сила Bbrake (0,39G на фиг. 14) колес на стороне A.
Следует отметить, что, как показано на фиг. 14, фрикционная тормозная сила колес на стороне B сзади относительно направления движения также принимает значение в точке C1 на характеристической линии C распределения фрикционной тормозной силы, где Bbrake=0,39G, и, следовательно, равна фрикционной тормозной силе Bbrake (0,39G) колес на стороне A.
Фрикционная тормозная сила Bbrake вычисляется вышеуказанным способом, когда целевая тормозная сила Bf передних колес превышает максимальную рекуперативную тормозную силу Bmfmax, как в случае фиг. 14.
В этом случае, как описано выше, фрикционная тормозная сила Bbrake предполагается в качестве результата вычитания Bmfmax из Bf, и рекуперативная тормозная сила Bmf, сформированная посредством электродвигателей 21 или 22 приводов передних колес, предполагается равной Bmfmax.
С другой стороны, когда максимальная рекуперативная тормозная сила Bmfmax равна или превышает целевую тормозную силу Bf передних колес, вся целевая тормозная сила Bf передних колес может быть обработана посредством рекуперативного торможения.
В этом случае фрикционная тормозная сила Bbrake предполагается равной нулю, и рекуперативная тормозная сила Bmf, сформированная посредством электродвигателей 21 или 22 приводов передних колес, предполагается равной Bf.
На следующем этапе S44 контроллер 12 подставляет требуемое замедление ARP транспортного средства, оцененное на этапе S43, в вышеуказанную формулу (2). Тем самым, целевая тормозная сила Br задних колес, которая существует на идеальной характеристической линии Ao (Bo) распределения тормозной силы на фиг. 6 и используется для достижения требуемого замедления ARP транспортного средства, вычисляется для колес сзади относительно направления движения.
Таким образом, этап S44 соответствует модулю вычисления целевой тормозной силы задних колес настоящего изобретения.
На этапе S45 через сравнение между фрикционной тормозной силой Bbrake, вычисленной на этапе S43, и целевой тормозной силой Br задних колес, вычисленной на этапе S44, контроллер 12 проверяет то, больше или нет первая (или фрикционная тормозная сила Bbrake) второй (или целевой тормозной силы Br задних колес).
Далее описывается сравнение между фрикционной тормозной силой Bbrake и целевой тормозной силой Br задних колес с использованием случая, когда сторона A кузова 1 транспортного средства со стороны колес является передней в направлении движения, как показано на фиг. 15(a) и 15(b), и тормозное оборудование третьего примера выполняет управление распределением тормозной силы в точке A1 на идеальной характеристической линии Ao распределения тормозной силы на фиг. 14.
Сравнение выполняется посредством сравнения фрикционной тормозной силы Bbrake и целевой тормозной силы Br задних колес на вертикальной линии (тормозной силы колес 4 на стороне B) на фиг. 14.
Как показано на фиг. 14, Bbrake, превышающее Br, означает, что фрикционная тормозная сила Bbrake превышает целевую тормозную силу Br задних колес в точке A1 на идеальной характеристической линии Ao распределения тормозной силы, и что тормозная сила сзади относительно направления движения (колеса 4 на стороне B в случае фиг. 14) превышает случай идеального распределения тормозной силы, тем самым делая характер движения транспортного средства нестабильным.
С другой стороны, Bbrake, равное или меньшее Br, означает, что фрикционная тормозная сила Bbrake равна или меньше целевой тормозной силы Br задних колес, и что тормозная сила колес сзади относительно направления движения равна или меньше случая идеального распределения тормозной силы, тем самым не делая характер движения транспортного средства нестабильным. Тем не менее, вышеуказанный случай также означает, что тормозная сила задних колес не является достаточно большой для того, чтобы достигать целевого значения на величину, соответствующую разности между фрикционной тормозной силой Bbrake и целевой тормозной силой Br задних колес.
Таким образом, при определении на этапе S45, что Bbrake равна или меньше Br, контроллер 12 инструктирует управлению переходить к этапам S46-S49, чтобы восполнять недостаточную тормозную силу колес сзади относительно направления движения.
На этапе S46 контроллер 12 определяет направление сиденья 5 водителя, управляемое так, как описано на фиг. 4.
Таким образом, этап S46 соответствует детектору направления сиденья водителя настоящего изобретения.
На следующем этапе S47 на основе определенного текущего направления сиденья 5 водителя контроллер 12 определяет то, является или нет направление движения направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства.
При определении на этапе S47, что направление движения является направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства, на этапе S48 контроллер 12 задает распределение тормозной силы таким образом, что оно может становиться целевым распределением тормозной силы, вычисленным на этапе S42, т.е. таким образом, что тормозная сила может быть большей в колесах 3 на стороне A (передних колесах), чем в колесах 4 на стороне B (задних колесах), так что распределение тормозной силы может совпадать или напоминать идеальные характеристики распределения тормозной силы, указываемые посредством Ao на фиг. 6 и 14.
Для этого контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 21 приводов колес для колес 3 на стороне A так, что они формируют электрические мощности, эквивалентные рекуперативной тормозной силе Bmf для передних колес. Затем, рекуперативная тормозная сила Bmf, необходимая для передних колес, которая является максимальной рекуперативной тормозной силой Bmfmax на фиг. 14, применяется к колесам 3 на стороне A. Тормозная сила Bf колес 3 на стороне A (передних колес) является суммой указанной фрикционной тормозной силы Bbrake и рекуперативной тормозной силы Bmf.
Помимо этого контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 22 приводов колес для колес 4 на стороне B так, что они формируют электрические мощности, эквивалентные рекуперативной тормозной силе Bmr для задних колес. Затем положительная рекуперативная тормозная сила Bmr, необходимая для задних колес, применяется к колесам 4 на стороне B. Следовательно, тормозная сила Br колес 4 на стороне B (задних колес) является суммой указанной фрикционной тормозной силы Bbrake и рекуперативной тормозной силы Bmr.
Контроллер 12 переходит к этапу S49 при определении, что направление движения является направлением, при котором сторона B кузова 1 транспортного средства со стороны колес является передней для транспортного средства. На этапе S49, контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 22 приводов колес для колес 4 на стороне B так, что они формируют электрические мощности, эквивалентные рекуперативной тормозной силе Bmf для передних колес. Затем, рекуперативная тормозная сила Bmf, необходимая для передних колес, применяется к колесам 4 на стороне B. Следовательно, тормозная сила Bf колес 4 на стороне B (передних колес) является суммой указанной фрикционной тормозной силы Bbrake и рекуперативной тормозной силы Bmf. Как результат, распределение тормозной силы может задаваться таким образом, что оно может становиться целевым распределением тормозной силы, вычисленным на этапе S42, т.е. таким образом, что тормозная сила может быть большей в колесах 4 на стороне B (передних колесах), чем в колесах 3 на стороне A (задних колесах), так что распределение тормозной силы может совпадать или напоминать идеальные характеристики распределения тормозной силы, указываемые посредством Bo на фиг. 6.
Помимо этого контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 21 приводов колес для колес 3 на стороне A так, что они формируют электрические мощности, эквивалентные рекуперативной тормозной силе Bmr для задних колес. Затем, положительная рекуперативная тормозная сила Bmr, необходимая для задних колес, применяется к колесам 3 на стороне A. Следовательно, тормозная сила Br колес 3 на стороне A (задних колес) является суммой указанной фрикционной тормозной силы Bbrake и рекуперативной тормозной силы Bmr.
При определении на этапе S45, что Bbrake превышает Br, как проиллюстрировано на фиг. 14, контроллер 12 инструктирует управление переходить к этапам S51-S54, чтобы исключать излишек тормозной силы колес сзади относительно направления движения, а также нестабильность в характере движения транспортного средства вследствие этого излишка.
На этапе S51 контроллер 12 определяет направление сиденья 5 водителя, управляемое так, как описано на фиг. 4.
Таким образом, этап S51 соответствует средству определения направления сиденья водителя и детектору направления сиденья водителя настоящего изобретения.
На следующем этапе S52 на основе определенного текущего направления сиденья 5 водителя контроллер 12 определяет то, является или нет направление движения направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства.
Контроллер 12 переходит к этапу S53 при определении, что направление движения является направлением, при котором сторона A кузова 1 транспортного средства со стороны колес является передней для транспортного средства. На этапе S53, контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 21 приводов колес для колес 3 на стороне A так, что они формируют электрические мощности, эквивалентные рекуперативной тормозной силе Bmf для передних колес. Затем, рекуперативная тормозная сила Bmf (максимальная рекуперативная тормозная сила Brnfmax на фиг. 14), необходимая для передних колес, применяется к колесам 3 на стороне A. Следовательно, тормозная сила Bf колес 3 на стороне A (передних колес) является суммой указанной фрикционной тормозной силы Bbrake и рекуперативной тормозной силы Bmf. Как результат, распределение тормозной силы может задаваться таким образом, что оно может становиться целевым распределением тормозной силы, вычисленным на этапе S42, т.е. таким образом, что тормозная сила может быть большей в колесах 3 на стороне A (передних колесах), чем в колесах 4 на стороне B (задних колесах), так что распределение тормозной силы может совпадать или напоминать идеальные характеристики распределения тормозной силы, указываемые посредством Ao на фиг. 6 и 14.
Помимо этого контроллер 12 выдает команду, чтобы назначать нагрузки электродвигателям 22 приводов колес для колес 4 на стороне B, чтобы приводить их в действие на величину, эквивалентную мощности Bmr привода от электродвигателя, необходимой для исключения излишка тормозной силы задних колес. Затем, мощность Bmr привода от электродвигателя (Bmr является отрицательным значением, как проиллюстрировано на фиг. 14), необходимая для исключения излишка тормозной силы задних колес и нестабильности в характере движения транспортного средства вследствие излишка, применяется к колесам 4 на стороне B. Как проиллюстрировано на фиг. 14, тормозная сила Br колес 4 на стороне B (задних колес) задается равной значению, которое меньше вышеуказанной фрикционной тормозной силы Bbrake на мощность Bmr привода от электродвигателя.
При определении на этапе S52, что направление движения является направлением, при котором сторона B кузова 1 транспортного средства со стороны колес является передней для транспортного средства, на этапе S54 контроллер 12 задает распределение тормозной силы таким образом, что оно может становиться целевым распределением тормозной силы, вычисленным на этапе S42, т.е. таким образом, что тормозная сила может быть большей в колесах 4 на стороне B (передних колесах), чем в колесах 3 на стороне A (задних колесах), так что распределение тормозной силы может совпадать или напоминать идеальные характеристики распределения тормозной силы, указываемые посредством Bo на фиг. 6.
Для этого рекуперативная тормозная сила Bmf, необходимая для передних колес, применяется к колесам 4 на стороне B (т.е. выдается команда, чтобы назначать нагрузки электродвигателям 22 приводов колес для колес 4 на стороне B так, что они формируют электрические мощности, эквивалентные рекуперативной тормозной силе Bmf для передних колес), так что тормозная сила Bf колес 4 на стороне B (передних колес) задается равной сумме указанной фрикционной тормозной силы Bbrake и рекуперативной тормозной силы Bmf.
Помимо этого мощность привода от электродвигателя Bmr=Br-Bbrake (Bmr является отрицательным значением), необходимая для исключения излишка тормозной силы задних колес (и нестабильности в характере движения транспортного средства вследствие этого излишка), применяется к колесам 3 на стороне A (т.е. выдается команда, чтобы назначать нагрузки электродвигателям 21 приводов колес для колес 3 на стороне A, чтобы приводить в их в движение на величину, эквивалентную мощности Bmr привода от электродвигателя, необходимой для исключения излишка тормозной силы задних колес), так что тормозная сила Br колес 3 на стороне A (задних колес) задается равной значению, которое меньше вышеуказанной фрикционной тормозной силы Bbrake на мощность Bmr привода от электродвигателя.
Таким образом, этапы S47 и S52 соответствуют модулю переключения настоящего изобретения, и этапы S48 и S49, а также этапы S53 и S54 соответствуют модулю торможения настоящего изобретения.
Преимущества третьего примера
Согласно управлению распределением тормозной силы третьего примера, описанного выше, можно достигать следующих преимуществ.
Можно достигать следующих количественных преимуществ в случае, если транспортное средство движется после того, как его перед в направлении движения переключается со стороны B на сторону A кузова 1 транспортного средства со стороны колес, как показано на фиг. 15(a) и 15(b). Такие преимущества описываются с использованием фиг. 14-15(b).
В частности, когда перед в направлении движения переключается со стороны B на сторону A, как показано на фиг. 15(a) и 15(b), распределение тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B переключается с распределения тормозной силы на характеристической линии распределения тормозной силы (опускаемой на фиг. 14), соответствующей идеальной характеристической линии Bo на фиг. 6, на распределение тормозной силы на характеристической линии Ao распределения тормозной силы на фиг. 11, соответствующей идеальной характеристической линии Ao на фиг. 6.
Рассмотрим случай торможения, например, в точке C1 (фрикционная тормозная сила колес 3 на стороне A=0,39G; фрикционная тормозная сила колес 4 на стороне B=0,39G) на характеристической линии C распределения фрикционной тормозной силы. В этом случае рекуперативная тормозная сила Bmf (максимальная рекуперативная тормозная сила Bmfmax=0,4G на фиг. 14) добавляется к фрикционной тормозной силе (0,39G) колес 3 на стороне A в точке C1. Помимо этого мощность Bmr привода от электродвигателя (=Br-Bbrake; Bmr=0,18G на фиг. 14) добавляется к фрикционной тормозной силе (0,39G) колес 4 на стороне B в точке C1 (этап S53). Соответственно, распределение тормозной силы становится распределением в точке A1 на характеристической линии Ao распределения тормозной силы на фиг. 14. В частности, как показано на фиг. 15(a), колеса 3 на стороне A формируют тормозную силу Bf=0,79G, что является суммой фрикционной тормозной силы Bbrake=0,39G и рекуперативной тормозной силы Bmf=0,4G. Колеса 4 на стороне B формируют тормозную силу Br=0,21G, что является суммой фрикционной тормозной силы Bbrake=0,39G и мощности привода от электродвигателя Bmr=-0,18G.
Переключение распределения тормозной силы на характеристическую линию Ao распределения тормозной силы задает тормозную силу Bf (0,79G) колес 3 на стороне A превышающей тормозную силу Br (0,21G) колес 4 на стороне B и, следовательно, изменяет на противоположное количественное отношение между ними. Соответственно, можно не допускать блокировки колес 4 на стороне B раньше колес 3 на стороне A и, следовательно, не допускать нестабильного характера движения, когда сдвиг нагрузки возникает в ходе торможения и увеличивает нагрузку на колесо для колес 3 на стороне A впереди относительно направления движения и снижает нагрузку на колесо для колес 4 на стороне B сзади относительно направления движения.
Помимо этого, поскольку распределение тормозной силы является распределением в точке A1 на идеальной характеристической линии Ao, формируемая тормозная сила передних колес 3, которая увеличивается вследствие увеличения нагрузки на колеса, может быть использована в полном объеме. Как показано на фиг. 15(a), можно получать 0,79G+0,21G=1,0G, что является большим замедлением ARP транспортного средства.
Следует отметить, что вышеуказанные преимущества также могут получаться, когда направление сиденья водителя изменяется на противоположное, чтобы переключать перед в направлении движения со стороны A на сторону B, как и следовало ожидать. В частности, посредством выполнения этапа S54, распределение тормозной силы переключается между колесами 3 на стороне A и колесами 4 на стороне B с распределения тормозной силы на характеристической линии Ao распределения тормозной силы на фиг. 14, соответствующей идеальной характеристической линии Ao на фиг. 6, на распределение тормозной силы на характеристической линии распределения тормозной силы (опускаемой на фиг. 14), соответствующей идеальной характеристической линии Bo на фиг. 6.
Между тем рассмотрим случай, когда вышеуказанная технология, предложенная и описанная в PL 1, используется, и рекуперативная тормозная сила электродвигателя, которая соответствует увеличению нагрузки на колеса 3 на стороне A, выступающие в качестве колес впереди относительно направления движения, применяется к колесам 3 в ходе торможения в то время, когда транспортное средство движется со стороной A в качестве передней в направлении движения (это упоминается как сравнительный пример третьего примера). В этом случае, распределение тормозной силы может становиться распределением тормозной силы в точке A2 (фрикционная тормозная сила колес 3 на стороне A=0,5G; фрикционная тормозная сила колес 4 на стороне B=0,18G) на характеристической линии Ao распределения тормозной силы на фиг. 14, как упомянуто выше на фиг. 8.
Как результат, как показано на фиг. 15(b), тормозная сила посредством колес 3 на стороне A составляет 0,5G, и тормозная сила посредством колес 4 на стороне B составляет 0,18G. Поскольку это распределение тормозной силы существует на идеальной характеристической линии Ao распределения тормозной силы, упреждающая блокировка колес 4 на стороне B (и, следовательно, нестабильный характер движения) может предотвращаться.
Тем не менее, достижимое замедление ARP транспортного средства составляет только приблизительно 0,68G, что является суммой тормозной силы в 0,5G колес 3 на стороне A и тормозной силы в 0,18G колес 4 на стороне B.
Напротив, согласно третьему примеру, как показано на фиг. 15(a) и 15(b), когда перед в направлении движения переключается со стороны B на сторону A или со стороны A на сторону B, распределение тормозной силы между колесами 3 на стороне A и колесами 4 на стороне B переключается на такое распределение тормозной силы, при котором тормозная сила может быть большей в колесах впереди относительно направления движения, чем в колесах сзади относительно направления движения, посредством добавления рекуперативной тормозной силы на этапе S48 или S49 или посредством добавления мощности привода от электродвигателя на этапе S53 или S54.
Соответственно можно не допускать блокировки задних колес раньше передних колес и, следовательно, не допускать нестабильного характера движения, когда сдвиг нагрузки возникает в ходе торможения и увеличивает нагрузку на колесо для колес впереди относительно направления движения и снижает нагрузку на колесо для колес сзади относительно направления движения.
Помимо этого большое замедление ARP транспортного средства может быть сформировано посредством полного использования формируемой тормозной силы передних колес, которая увеличивается вследствие увеличения нагрузки на колеса.
Кроме того, в третьем примере, если фрикционная тормозная сила Bbrake является чрезмерной так, что фрикционная тормозная сила Bbrake отдельно блокирует колеса сзади относительно направления движения раньше колес впереди относительно направления движения (этап S45), мощность привода от электродвигателя, эквивалентная величине, соответствующей такому излишку тормозной силы, применяется к колесам сзади относительно направления движения вместо рекуперативной тормозной силы (этапы S53 и S54).
Таким образом, когда торможение должно выполняться с чрезмерной фрикционной тормозной силой Bbrake, тормозная сила колес сзади относительно направления движения может подавляться вниз до уровня, на котором задние колеса не блокируются раньше колес впереди относительно направления движения. Тем самым, можно не допускать упреждающей блокировки задних колес и, следовательно, не допускать нестабильного характера движения.
Кроме того, тормозная сила колес впереди относительно направления движения управляется таким образом, что она является целевой тормозной силой передних колес согласно идеальным характеристикам распределения тормозной силы.
Соответственно формируемая тормозная сила передних колес, которая увеличивается вследствие увеличения нагрузки на колеса как результат сдвига нагрузки в ходе торможения, может быть использована в полном объеме, посредством чего достаточное замедление транспортного средства может обеспечиваться.
Тем самым можно обеспечивать достаточное замедление транспортного средства и не допускать упреждающей блокировки задних колес (следовательно, не допускать нестабильности в характере движения транспортного средства) одновременно при высоких уровнях.
Другие примеры
В любом из первого-третьего примеров, описанных выше, как показано на фиг. 1 и 2, кузов 2 транспортного средства со стороны салона монтируется на кузове 1 транспортного средства со стороны колес с подшипником 9, размещенным между ними, и тем самым задается вращающимся вокруг его центральной вертикальной линии O. Кроме того, кузов 2 транспортного средства со стороны салона принудительно изменяет свое направление с помощью актуатора 11 изменения направления, такого как электродвигатель, предоставляемый в модуле 6 приборной панели, и через шестерню 11a, соединенную с выходным валом актуатора 11 изменения направления.
Тем не менее следует отметить, что механизм для изменения направления кузова 2 транспортного средства со стороны салона не ограничен данным механизмом и может быть механизмом с любой структурой. Кроме того, изменение направления кузова 2 транспортного средства со стороны салона не ограничено изменением, выполняемым через двустороннее (положительное и отрицательное) вращение кузова 2 транспортного средства со стороны салона. Изменение направления может выполняться через однонаправленное вращение.
Помимо этого способ приведения в движение колес 3 и 4 не ограничен способом на основе так называемого мотор-колеса, при котором колесные пары 3 и 4 содержат и приводятся в движение посредством соответствующих пар электродвигателей 21 и 22 приводов колес, как показано на фиг. 1 и 2.
Например, можно использовать способ привода колес, при котором один электродвигатель привода колес предоставляется в кузове 1 транспортного средства со стороны колес на каждой из его одной и другой сторон в направлении движения, и каждая пара левых и правых колес 3 и 4 на соответствующей стороне использует и приводится в действие посредством одного электродвигателя на этой стороне.
Альтернативно, можно использовать способ привода колес, при котором все колеса 3 и 4 содержат один общий электродвигатель и приводятся в действие посредством этого электродвигателя через полуосевую шестерню и ведущие валы.
Дополнительно, в первом примере, как показано на фиг. 3, гидравлическая тормозная система является гидравлической тормозной системой с диагональным разделением с 4 датчиками и 4 каналами, в которой давления тормозной жидкости для колес 3 и 4 электронно управляются посредством модулей 43 и 44 на основе давления Pm в главном цилиндре, соответствующего величине Lb нажатия педали тормоза. Тем не менее, тормозная система может быть системой с любой конфигурацией при условии, что она позволяет управлять распределением тормозной силы между колесами 3 и 4 на одной и другой сторонах, в направлении движения, кузова 1 транспортного средства со стороны колес. Например, тормозная система может быть гидравлической тормозной системой с передним/задним разделением.
Кроме того, датчики 46 и 47 скорости вращения колес в первом примере, показанном на фиг. 3, могут заменяться датчиками вращения электродвигателя, выполненными с возможностью определения частот вращения электродвигателей 21 и 22 приводов колес, если способ приведения в движение колес 3 и 4 является способом на основе мотор-колеса, как показано на фиг. 1-3. В этом случае предпочтительно устанавливать датчики вращения электродвигателя в отдельных колесах 3 и 4 соответственно.
Выше описаны варианты осуществления настоящего изобретения. Тем не менее, эти варианты осуществления описываются, чтобы упрощать понимание настоящего изобретения, а не ограничивать настоящее изобретение. Следовательно, элементы, раскрытые в вышеописанных вариантах осуществления, охватывают все конструктивные модификации и эквиваленты, которые попадают в объем настоящего изобретения.
Промышленная применимость
Настоящее изобретение характеризуется управлением распределением тормозной силы между тормозными силами колес на одной стороне и колес на другой стороне в соответствии с направлением сиденья водителя. Согласно такому тормозному оборудованию и способу торможения для транспортного средства с изменяемым направлением сиденья водителя, стабильность в характере движения транспортного средства и требуемое замедление могут достигаться одновременно независимо от того, движется транспортное средство с сиденьем водителя, обращенным в одну или другую сторону в направлении движения. Следовательно, тормозное оборудование и способ торможения для транспортного средства с изменяемым направлением сиденья водителя являются промышленно применимыми.
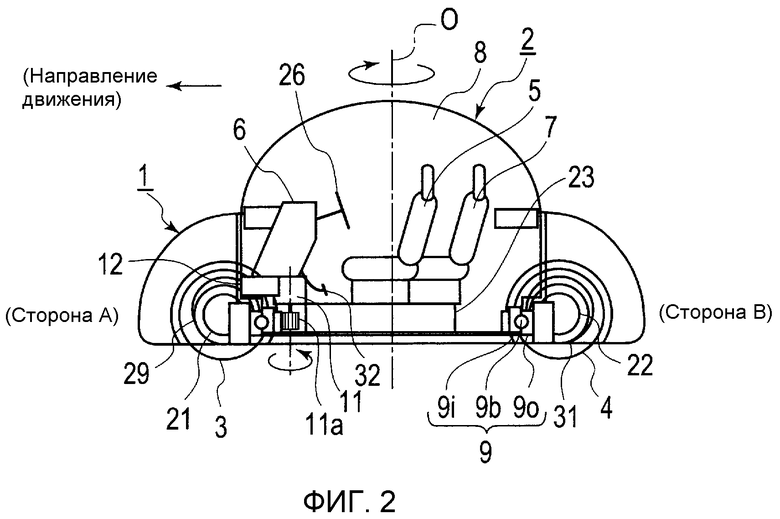
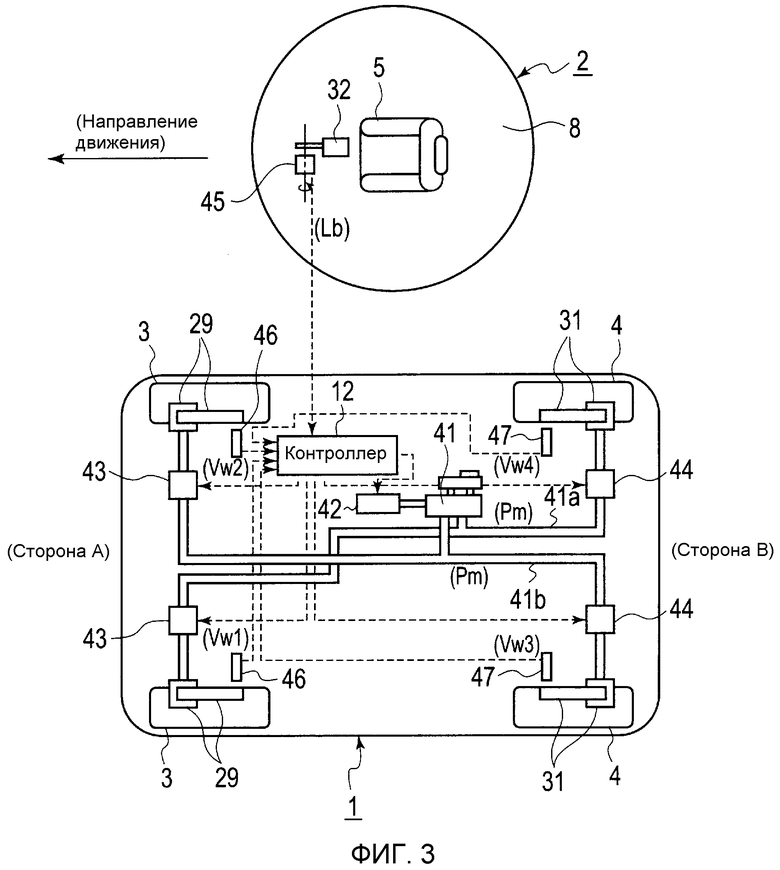
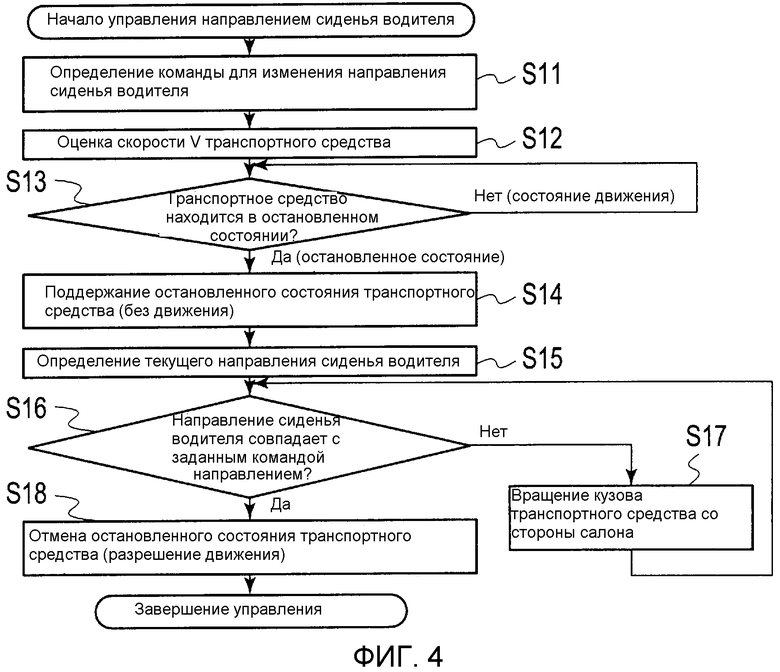
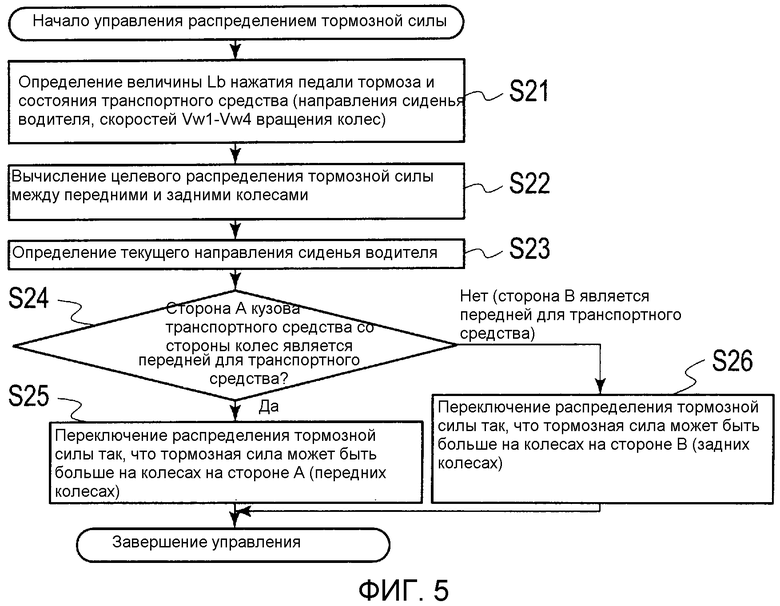
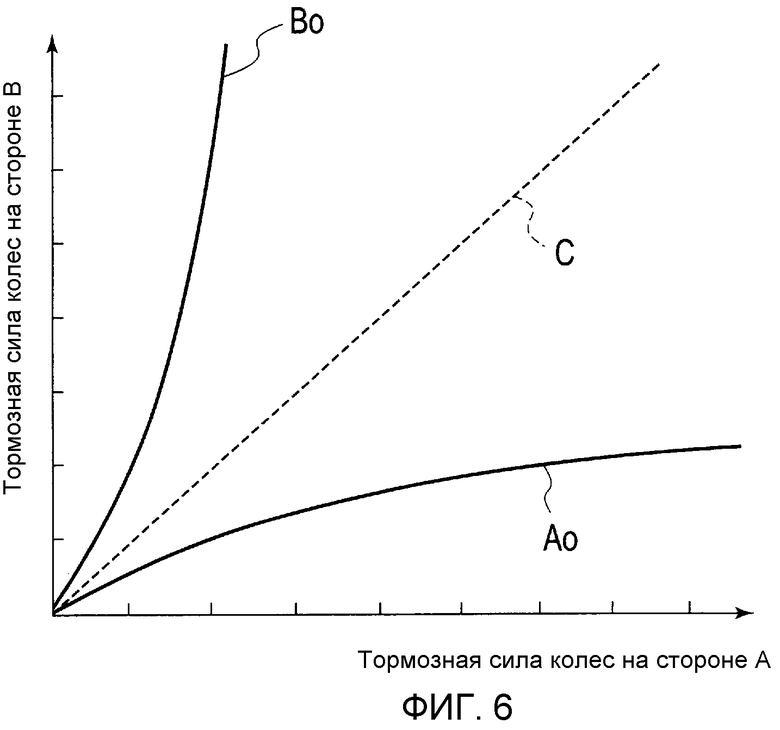
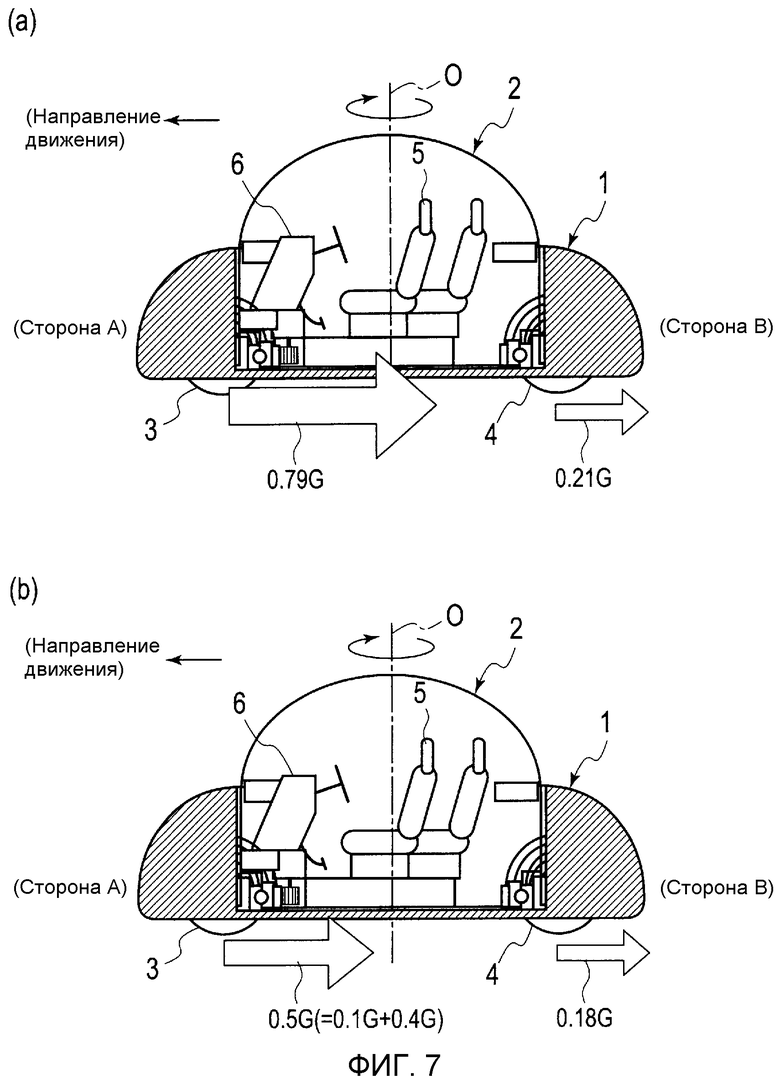
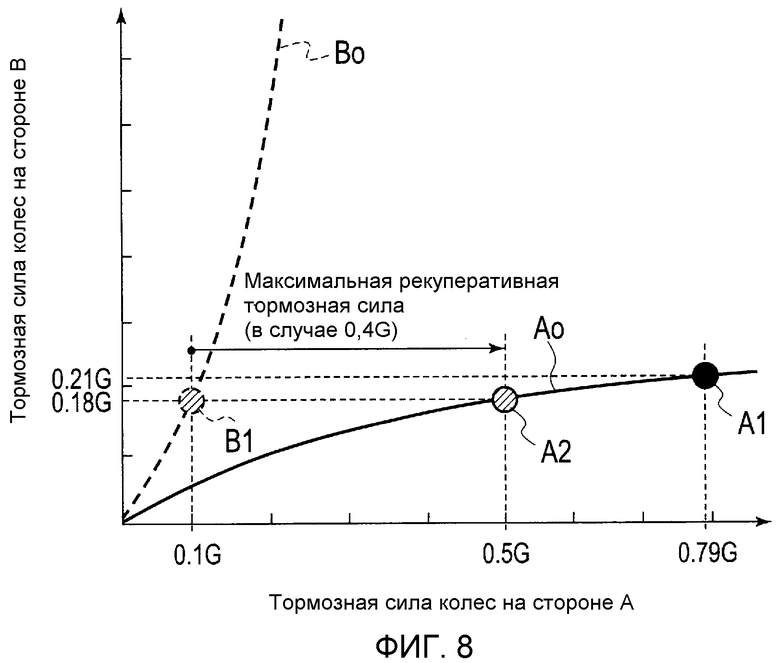
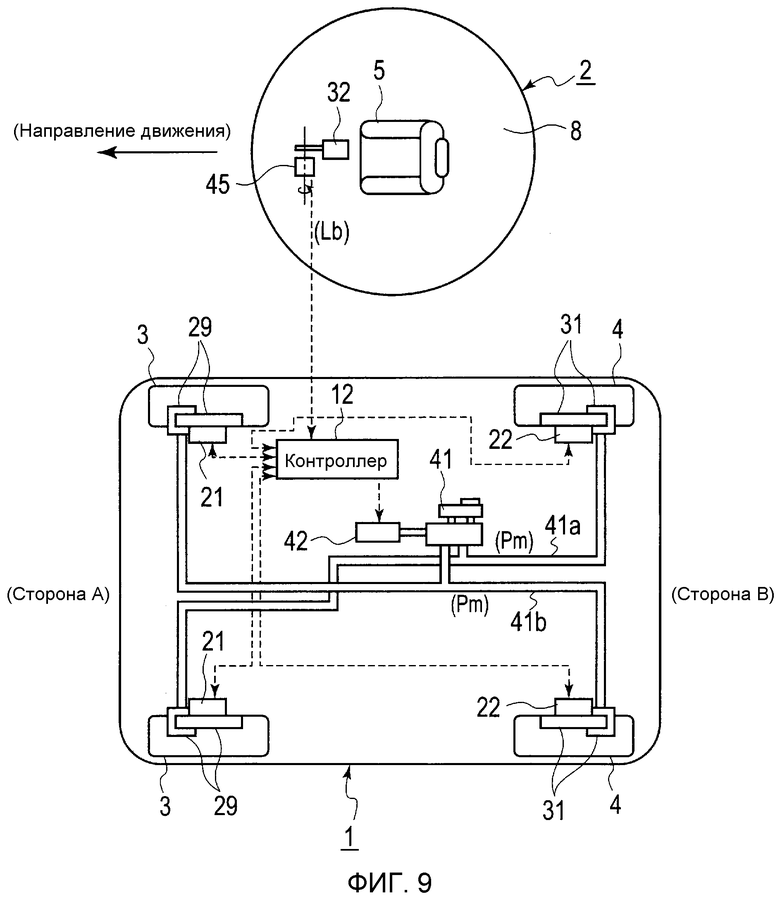
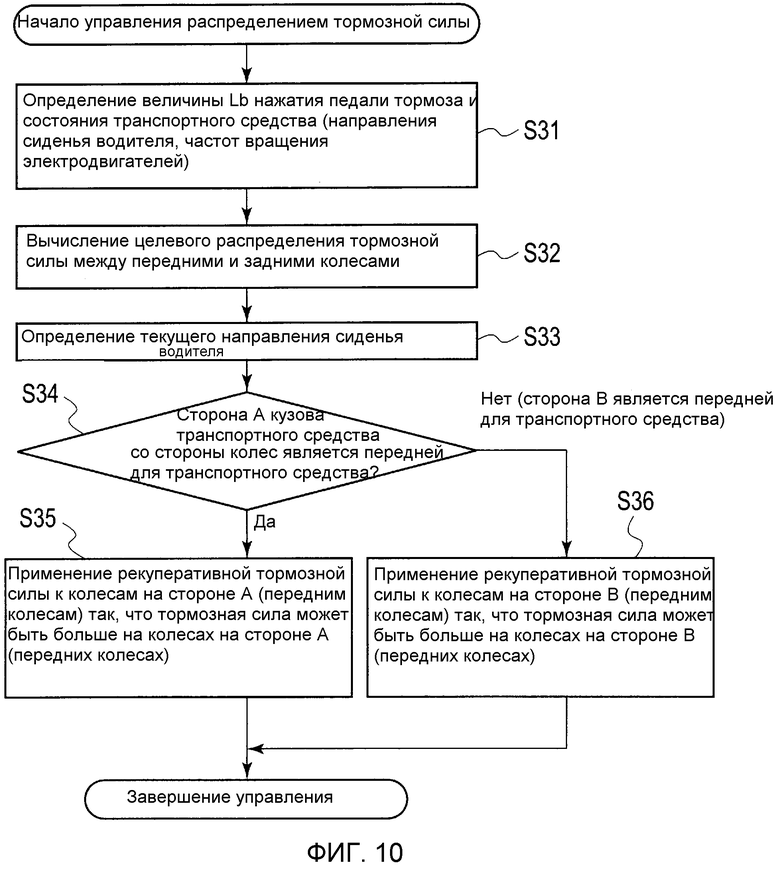
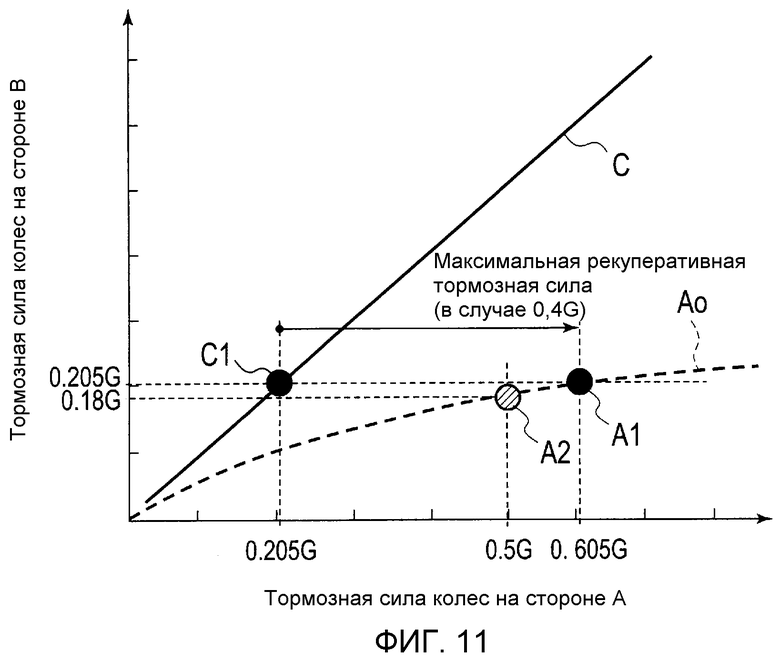
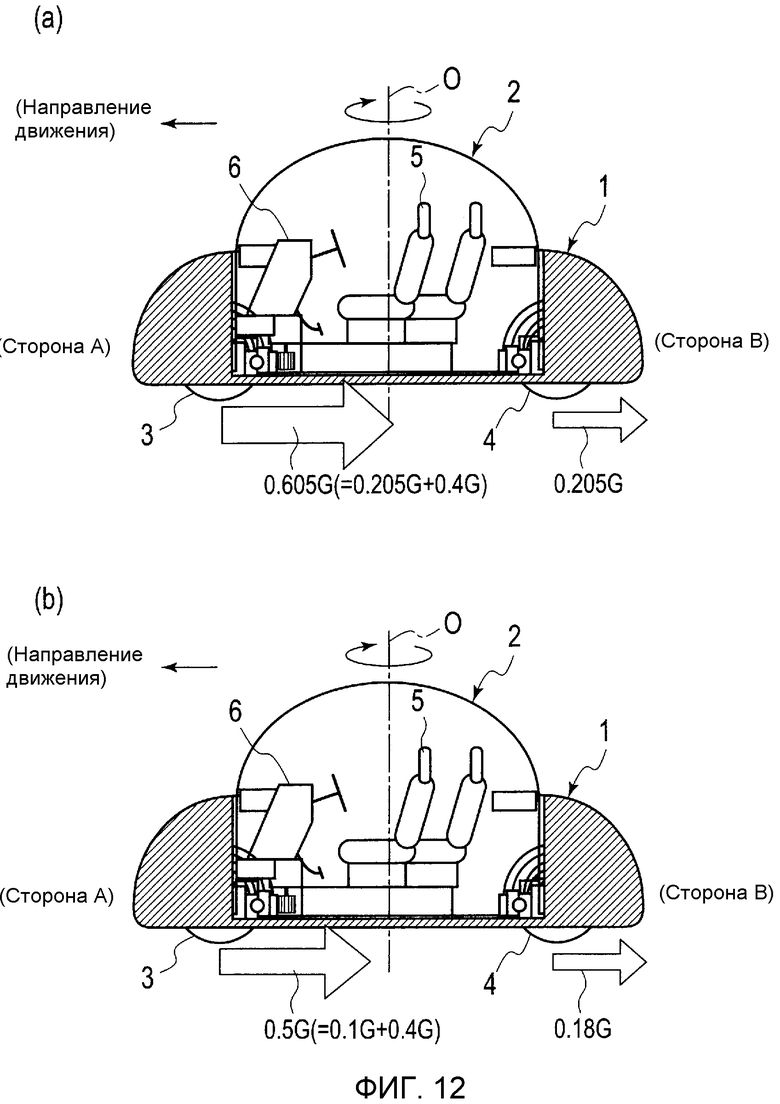
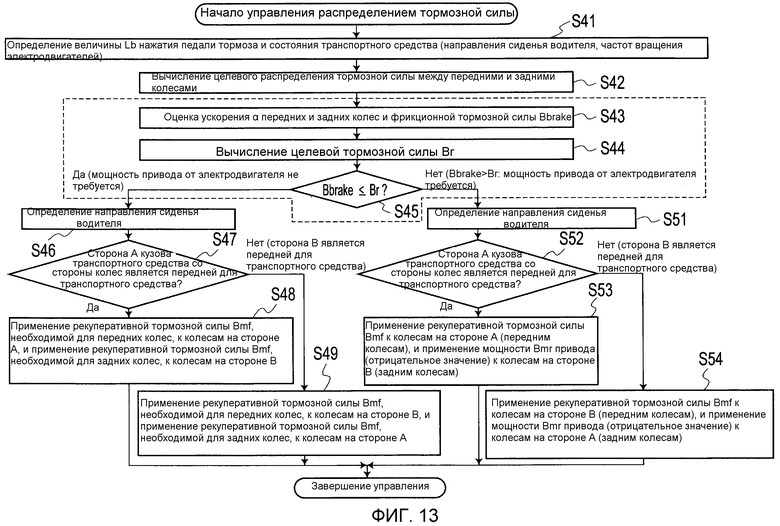
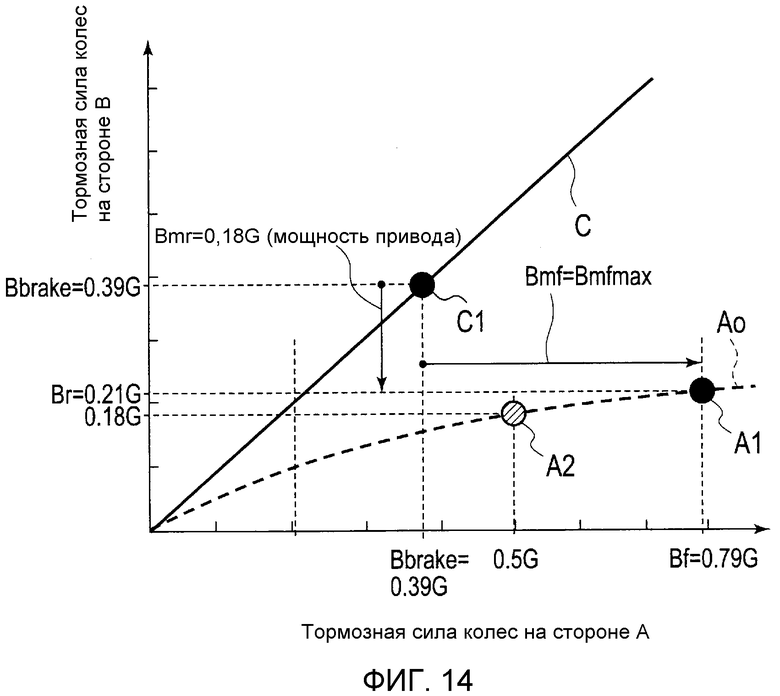
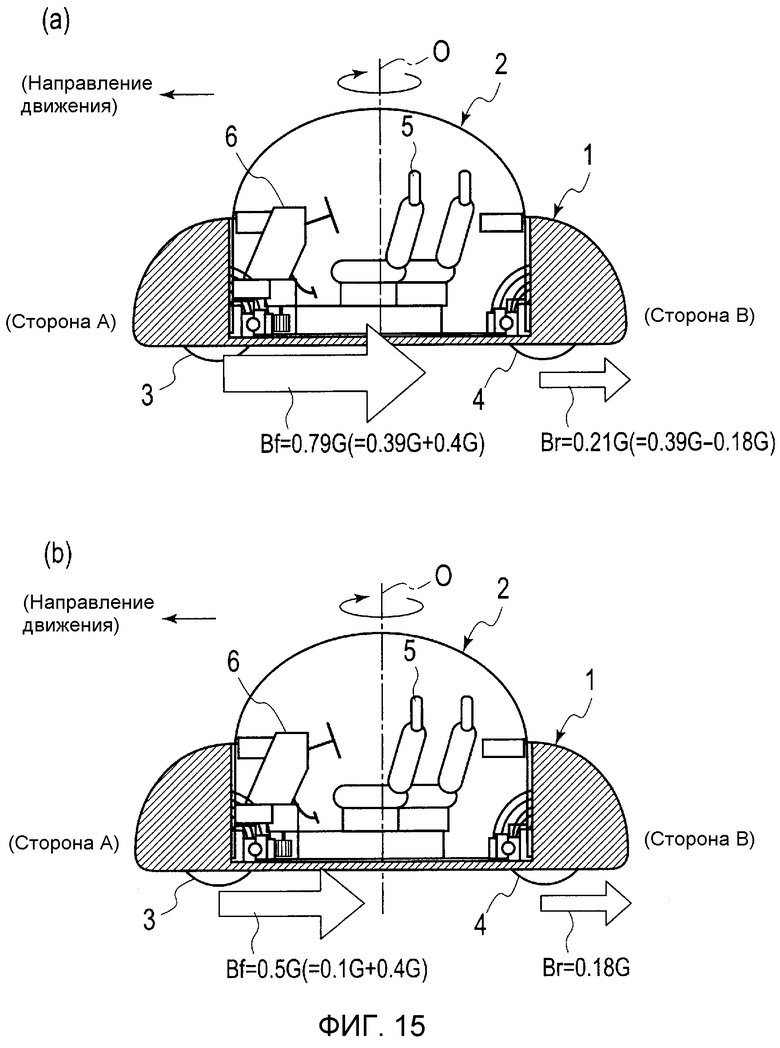
Группа изобретений относится к тормозному оборудованию и способу торможения для транспортного средства с изменяемым направлением сиденья водителя. Тормозное оборудование транспортного средства с сиденьем водителя, направление которого является изменяемым, содержит детектор направления сиденья водителя, модуль торможения и модуль переключения. Способ торможения для указанного транспортного средства включает этапы, на которых определяют, обращено ли сиденье водителя в одну или другую сторону и затормаживают колеса на одной стороне, в направлении движения кузова транспортного средства и колеса на другой стороне. При этом заданное распределение тормозной силы изменяют в соответствии с определяемым направлением сиденья водителя. Изобретение также относится к транспортному средству с изменяемым сиденьем водителя, в котором применяется указанное тормозное оборудование. Решение направлено на повышение стабильности замедления транспортного средства вне зависимости от его направления движения. 3 н. и 6 з.п. ф-лы, 15 ил.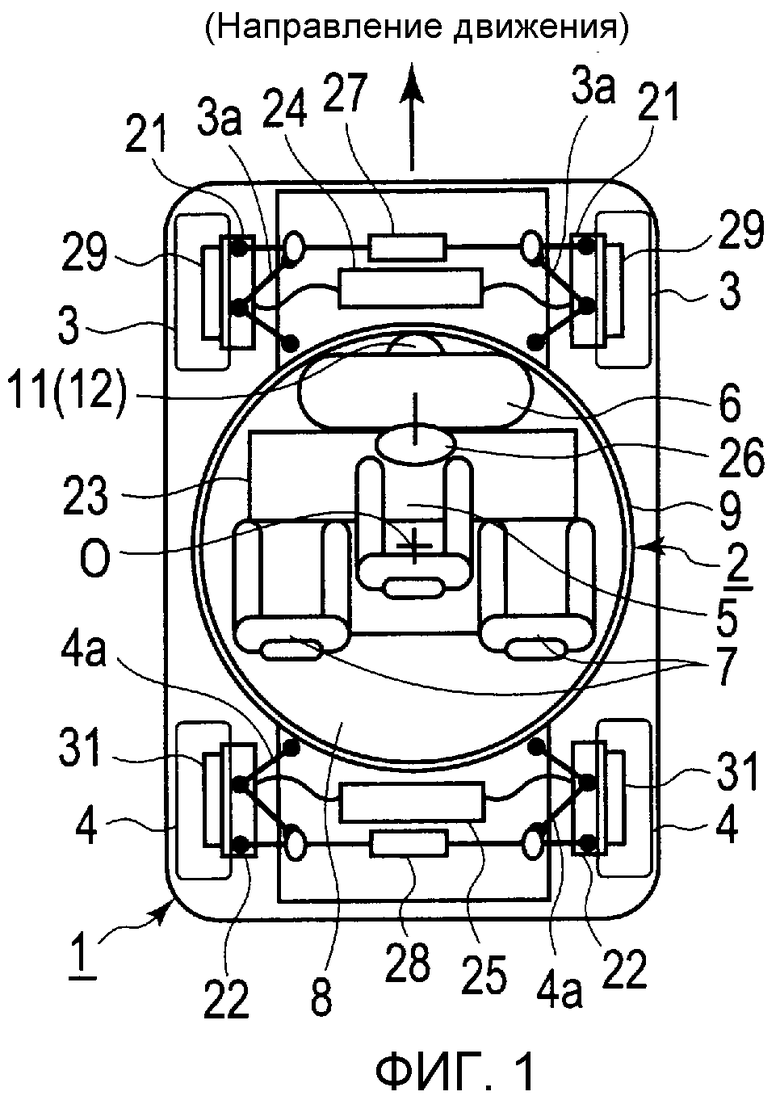
1. Тормозное оборудование транспортного средства с сиденьем водителя, направление которого является изменяемым, причем транспортное средство включает в себя:
кузов транспортного средства со стороны колес, который имеет подвешенные на нем колеса и допускает движение и остановку посредством приведения в движение и торможения колес; и
кузов транспортного средства со стороны салона, который монтируется на кузове транспортного средства со стороны колес таким образом, что он допускает поворот, по меньшей мере, в направлениях, приводящих к тому, что сиденье водителя соответственно обращено в одну и другую сторону в направлении движения кузова транспортного средства со стороны колес, при этом тормозное оборудование содержит:
детектор направления сиденья водителя, выполненный с возможностью определения того, что сиденье водителя обращено в одну или другую сторону в направлении движения кузова транспортного средства со стороны колес;
модуль торможения, выполненный с возможностью торможения колес на одной стороне, которые находятся ближе к одной стороне в направлении движения кузова транспортного средства со стороны колес и колес на другой стороне, которые находятся ближе к другой стороне в направлении движения кузова транспортного средства со стороны колес при управлении распределением тормозной силы между тормозными силами колес на одной стороне и колес на другой стороне таким образом, что распределение тормозной силы становится заданным распределением тормозной силы на основе идеальных характеристик распределения тормозной силы; и
модуль переключения, выполненный с возможностью изменения заданного распределения тормозной силы в соответствии с направлением сиденья водителя, определяемым посредством детектора направления сиденья водителя.
2. Тормозное оборудование по п.1, в котором модуль переключения переключает заданное распределение тормозной силы на такое распределение тормозной силы, при котором из колес на одной стороне и колес на другой стороне передним колесам на стороне, в которую обращено сиденье водителя, обеспечивается большая тормозная сила, чем задним колесам на противоположной стороне.
3. Тормозное оборудование по п.1, в котором модуль торможения включает в себя:
тормозную систему для колес на одной стороне и
тормозную систему для колес на другой стороне, которая имеет технические требования, идентичные техническим требованиям тормозной системы для колес на одной стороне.
4. Тормозное оборудование по п.3, в котором модуль торможения включает в себя:
модуль фрикционного торможения, выполненный с возможностью торможения колес на одной стороне и колес на другой стороне через фрикционное торможение с идентичной тормозной силой, и
модуль рекуперативного торможения, выполненный с возможностью торможения колес на одной стороне и колес на другой стороне через рекуперативное торможение под отдельным управлением, и
модуль торможения по отдельности управляет рекуперативными тормозными силами колес на одной стороне и колес на другой стороне и тем самым управляет распределением тормозной силы между колесами на одной стороне и колесами на другой стороне таким образом, что распределение тормозной силы становится заданным распределением тормозной силы.
5. Тормозное оборудование по п.4, дополнительно содержащее:
модуль оценки замедления транспортного средства, выполненный с возможностью оценки значения замедления, требуемого для транспортного средства; и
модуль вычисления целевой тормозной силы задних колес, выполненный с возможностью вычисления целевой тормозной силы задних колес из значения требуемого замедления, оцененного посредством модуля оценки замедления транспортного средства, при этом, когда фрикционная тормозная сила задних колес превышает целевую тормозную силу задних колес, модуль рекуперативного торможения применяет мощность привода от электродвигателя к задним колесам посредством использования рекуперативного тормозного электродвигателя вместо рекуперативной тормозной силы.
6. Тормозное оборудование по п.5, в котором:
целевая тормозная сила задних колес является целевой тормозной силой задних колес согласно идеальным характеристикам распределения тормозной силы, которые приводят к тому, что передние колеса и задние колеса блокируются одновременно, и
модуль торможения управляет тормозной силой передних колес таким образом, что тормозная сила передних колес становится целевой тормозной силой передних колес согласно идеальным характеристикам распределения тормозной силы.
7. Тормозное оборудование по п.6, в котором мощность привода от электродвигателя, которая должна применяться к задним колесам посредством использования рекуперативного тормозного электродвигателя, равна разности между фрикционной тормозной силой задних колес и целевой тормозной силой задних колес.
8. Способ торможения для транспортного средства с сиденьем водителя, направление которого является изменяемым, причем транспортное средство включает в себя:
кузов транспортного средства со стороны колес, который имеет подвешенные на нем колеса и допускает движение и остановку посредством приведения в движение и торможения колес; и
кузов транспортного средства со стороны салона, который монтируется на кузове транспортного средства со стороны колес таким образом, что он допускает поворот, по меньшей мере, в направлениях, приводящих к тому, что сиденье водителя соответственно обращено в одну и другую сторону в направлении движения кузова транспортного средства со стороны колес, при этом способ включает этапы, на которых:
определяют, обращено ли сиденье водителя в одну или другую сторону в направлении движения кузова транспортного средства со стороны колес;
и
затормаживают колеса на одной стороне, которые находятся ближе к одной стороне, в направлении движения кузова транспортного средства со стороны колес, и колеса на другой стороне, которые находятся ближе к другой стороне в направлении движения кузова транспортного средства со стороны колес при управлении распределением тормозной силы между тормозными силами колес на одной стороне и колес на другой стороне таким образом, что распределение тормозной силы становится заданным распределением тормозной силы на основе идеальных характеристик распределения тормозной силы,
при этом заданное распределение тормозной силы изменяют в соответствии с определяемым направлением сиденья водителя.
9. Транспортное средство с сиденьем водителя, направление которого является изменяемым, содержащее:
кузов транспортного средства со стороны колес, который имеет подвешенные на нем колеса и допускает движение и остановку посредством приведения в движение и торможения колес;
кузов транспортного средства со стороны салона, который монтируется на кузове транспортного средства со стороны колес таким образом, что он допускает поворот, по меньшей мере, в направлениях, приводящих к тому, что сиденье водителя соответственно обращено в одну и другую сторону в направлении движения кузова транспортного средства со стороны колес;
детектор направления сиденья водителя, выполненный с возможностью определения того, что сиденье водителя обращено в одну или другую сторону в направлении движения кузова транспортного средства со стороны колес;
модуль торможения, выполненный с возможностью торможения колес на одной стороне, которые находятся ближе к одной стороне, в направлении движения кузова транспортного средства со стороны колес и колес на другой стороне, которые находятся ближе к другой стороне в направлении движения кузова транспортного средства со стороны колес при управлении распределением тормозной силы между тормозными силами колес на одной стороне и колес на другой стороне таким образом, что распределение тормозной силы становится заданным распределением тормозной силы на основе идеальных характеристик распределения тормозной силы; и
модуль переключения, выполненный с возможностью изменения заданного распределения тормозной силы в соответствии с направлением сиденья водителя, определяемым посредством детектора направления сиденья водителя.
| JP 2004312943 A, 04.11.2004 | |||
| US 2003127272 A1, 10.07.2003 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЛИЧЕСТВА ТОПЛИВА В БАКЕ АВТОМОБИЛЯ | 2005 |
|
RU2301406C1 |

