Изобретение относится к области геофизики, астрономии и астрофизики, а именно к способам и устройствам измерения ускорения силы тяжести.
Известны способы для измерения абсолютного значения ускорения силы тяжести, например, к ним относятся баллистический и маятниковый.
Баллистический метод основан на измерении ускорения силы тяжести g, определяемом по результатам измерения пути и времени свободного падения оптического уголкового отражателя.
Главными источниками погрешностей баллистического метода являются торможение падающего отражателя окружающим воздухом, взаимодействие с электрическими и магнитными полями, микроколебания фундамента, вращение отражателя, не вертикальность светового луча. Поэтому баллистические гравиметры практически невозможно использовать с подвижных оснований: на надводных и подводных судах, автомобилях, авиатранспорте (Огородова Л.В., Шимбирев Б.П., Юзефович А.П. Гравиметрия. М.: «Недра», 1978, с.82).
Известен маятниковый способ измерения ускорения силы тяжести и устройство «Агат», реализующее данный способ, представляющее собой комплекс высокоточной маятниковой аппаратуры (Грушинский Н.П., Сажина М. Гравитационная разведка. «Недра», 1981, с.97). Принцип, лежащий в основе измерений ускорения силы тяжести маятникового способа, заключается в использовании зависимости периода колебаний свободного маятника от ускорения силы тяжести g. Однако данный способ имеет ряд ограничений. Например, для его осуществления необходимо либо предварительное вычисление силы тяжести в исходной точке, либо для вычисления абсолютного значения g - знание длины маятника с высокой степенью точности, кроме того, способ длителен по времени, так как для получения точных значений g необходимо значительно увеличить время наблюдения. К недостаткам способа можно отнести также необходимость учета поправок, вызванных колебаниями маятника в плоскостях, отличных от плоскости качания, которые часто непредсказуемы, учета силы трения и изменения температуры.
Гравиметрический комплекс «Агат» для реализации известного способа включает источник питания, стандарт частоты, измерительную систему, состоящую из запускающего устройства, чувствительного элемента в виде трех двухмаятниковых приборов и оптической системы съема информации, соединенной с пересчетным устройством.
К недостаткам известного устройства можно отнести ограниченность области его использования и невысокую точность определения ускорения силы тяжести из-за трудности учета помех, вызванных колебаниями маятника в направлениях, отличных от плоскости качания маятника, а также массивность устройства.
Наиболее близким к заявляемому способу является маятниковый способ измерения ускорения силы тяжести, основанный на свойстве взаимности точек подвеса и центра качания маятника: если одна из точек лежит на оси качания, то вторая становится центром качания, при этом расстояние между ними равно приведенной длине. На свойстве взаимности точек основано и оборотное маятниковое устройство, реализующее данный способ (Огородова Л.В., Шимбирев Б.П., Юзефович А.П. Гравиметрия. М.: «Недра», 1978, с.74,89).
Ускорение силы тяжести по известному способу вычисляют, измеряя колебания оборотного маятника, снабженного двумя призмами, лезвия которых параллельны. Колебания маятника наблюдают в прямом и обратном положениях. По измеренным периодам колебаний T1 и T2 и расстоянию l между лезвиями вычисляют период колебаний Т маятника с приведенной длиной l и далее по известным зависимостям вычисляют ускорение силы тяжести g.
Устройство для реализации известного способа включает источник питания, систему измерения времени колебаний, измерительную систему, состоящую из запускающего устройства, чувствительного элемента в виде оборотного маятника, снабженного двумя призмами, лезвия которых, являясь точками подвеса, параллельны. Запись колебаний производится с использованием оптической системы съема информации, включающей источник света, передающей луч света на зеркало, установленное на маятнике, и пересчетное устройство. В прямом и обратном положении маятника измеряют число колебаний по числу световых импульсов, возникающих при прохождениях маятника через положение равновесия. Измерение периода колебаний маятника осуществляется системой измерения времени серии колебаний. Расстояние между лезвиями контролируют по эталону длины. Пересчетное устройство обеспечивает на выходе цифровую величину периода колебаний. Далее по известным зависимостям вычисляют ускорение силы тяжести g. Чувствительный элемент изолирован от внешней среды, размещен в корпусе на жестком основании.
К недостаткам известного устройства можно отнести ограниченность области его использования и невысокую точность определения ускорения силы тяжести из-за трудности учета помех, вызванных колебаниями маятника в направлениях, отличных от плоскости качания маятника, а также массивность устройства.
Задача заявляемой группы изобретений состоит в повышении точности определения ускорения силы тяжести g, расширении области использования, а также улучшении удобства эксплуатации.
Поставленная задача решается способом измерения ускорения силы тяжести g, включающим определение угловой скорости вращения волчка и угловой скорости прецессии волчка в прямом и обратном положениях волчка, при этом в качестве волчка используют насаженный на ось диск со сквозными отверстиями в форме сегментов, угловую скорость вращения волчка определяют по количеству пересечений светового потока сегментами диска в единицу времени, угловую скорость прецессии волчка - по количеству пересечений светового потока осью волчка, а ускорение силы тяжести вычисляют по формуле 
Поставленная задача решается также устройством для измерения ускорения силы тяжести g, содержащим источник питания, пересчетное устройство, соединенное с системой измерения времени колебаний и оптической системой съема информации, размещенной в корпусе измерительной системы, включающей чувствительный элемент и систему запуска чувствительного элемента, при этом чувствительный элемент выполнен в виде волчка в форме насаженного на ось диска со сквозными отверстиями в форме сегментов, установленного на твердой платформе с возможностью переворота вокруг горизонтальной оси, оптическая система съема информации включает два датчика съема информации, каждый из которых состоит из источника и приемника света, при этом один из датчиков установлен с возможностью измерения световых импульсов по количеству пересечений светового потока осью волчка, а другой - с возможностью измерения импульсов по количеству пересечений светового потока сегментами диска в единицу времени, при этом каждый датчик съема информации соединен со своим пересчетным устройством.
Известно, что согласно правилу прецессии гироскопа (Никитин Н.Н. Курс теоретической механики. М.: Высш. шк., 1990, с.607), под действием момента силы тяжести Р относительно основания оси (точка О) волчок прецессирует вокруг вертикальной оси (OZ) согласно уравнению

где l - расстояние от основания оси до центра тяжести волчка и, следовательно,

Для плоского однородного диска радиусом R и массой М момент инерции J0 относительно точки О равен:

И, подставляя (3) в (2), получим:

а

где ω1=2πn1об/мин/60, ω2=2πn2об/мин/60.
Заявляемый способ измерения ускорения силы тяжести основан на том, что ускорение в точке центра тяжести волчка постоянно, и, приравнивая правые части уравнения ускорения силы тяжести (4) в прямом положении волчка 


Далее, подставляя полученные значения l в уравнения ускорения силы тяжести в прямом и обратном положении волчка, получаем формулу для расчета ускорения свободного падения:

То есть, для вычисления g заявленным способом необходимо измерить угловые скорости вращения ω1 и прецессии ω2 волчка в прямом (первоначальном) положении и угловые скорости вращения ω3 и прецессии ω4 волчка в обратном (перевернутом) положении, длину L оси волчка и радиус R диска, что позволяет повысить точность определения ускорения силы тяжести g, поскольку не требуется нахождения расстояния от точки опоры оси волчка до центра тяжести l, которое трудно поддается точному определению. Длину же оси L волчка и радиус R диска можно точно изменить предварительно. Кроме этого, значительное увеличение скорости прецессии (колебаний) волчка относительно частоты колебаний маятника и отсутствие влияния на угловые скорости вращения и прецессии волчка наклонов измерительной системы в разных плоскостях также повышают точность определения ускорения силы тяжести g.
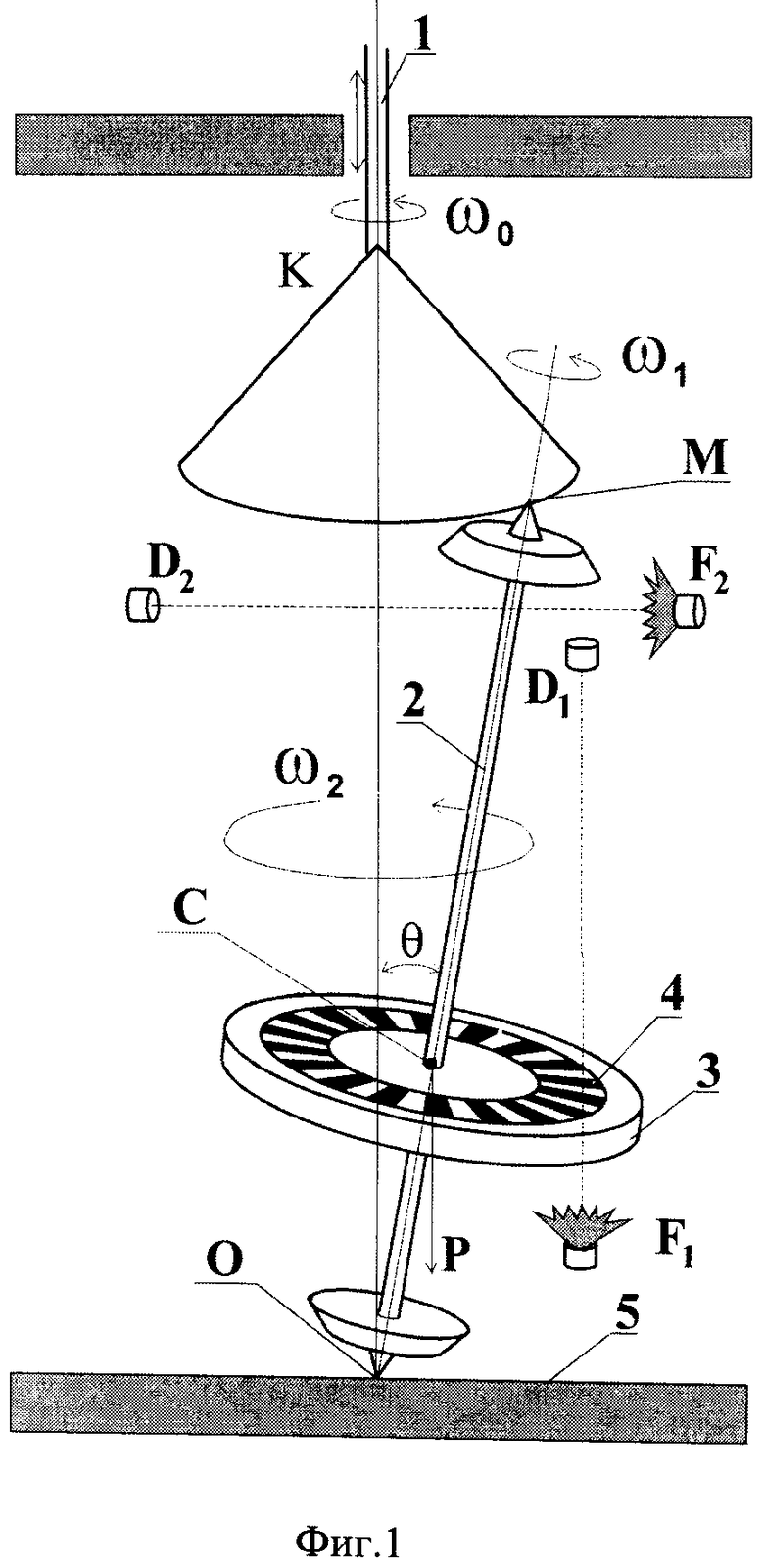
На фиг.1 и 2 представлена принципиальная схема измерительной системы для измерения ускорения силы тяжести g в прямом (Фиг.1) и обратном (Фиг.2) положениях, где 1 - система запуска, 2 - ось ОМ волчка, О - основание оси, 3 - диск, 4 - сквозные отверстия в форме сегментов, 5 - платформа, F1 и F2 - источники света, D1 -приемник светового потока, пересеченного сегментами (4) диска в единицу времени, D2 - приемник света после пересечения света осью (ОМ) волчка, С - центр тяжести волчка.
Заявляемое устройство работает следующим образом.
Система запуска (1) измерительной системы раскручивает волчок, захватывая верхний конец оси (2) волчка и затем, поднимаясь вверх, освобождает его. При этом ось (2) волчка начинает прецессировать вокруг вертикальной оси OZ с угловой скоростью ω2. Источник света F2 и приемник D2 размещены напротив друг друга так, что при прецессии ось (2) волчка периодически перекрывает световой поток D2, поступающий от источника F2. А источник света F1 и приемник D1 расположены так, что свет от источника F1 пересекается, проходит через сегменты (4) диска, сегментами диска (4) и попадает в приемник D1. Затем волчок переворачивают и снова раскручивают. Угловую скорость прецессии ω2 и ω4 измеряют по количеству пересечений в единицу времени осью ОМ волчка светового потока от F1. Угловую скорость вращения ω1 и ω3 волчка определяют по количеству пересечений сегментами (4) диска светового потока от F1, поступивших в D1 за то же время. Полученные импульсы светового потока поступают в пересчетные устройства (на фигурах не показаны), где вычисляют угловые скорости вращения волчка ω1 и ω3, угловую скорость прецессии ω2 и ω4. Зная длину (L) оси и радиус (R) диска волчка, по формуле
Волчок представляет собой диск, например латунный, со сквозными отверстиями в форме сегментов, насаженный на ось из твердого, коррозионно-стойкого материала, например, стали.
Платформу измерительной системы выполняют из материала, обладающего высокой твердостью, прочностью и малым коэффициентом трения пары ось волчка-платформа, например, агата.
В качестве источников и приемников света используют, например, оптопары с открытым оптическим каналом.
Система запуска волчка может быть реализована различными путями, например, в виде разгоняющего устройства из двух сопряженных конусов, один из которых находится в верхней части разгоняющего устройства и приводится во вращение, например, электромотором или воздушной турбиной, а другой расположен в верхней и нижней части оси волчка.
Для переворота волчка вокруг горизонтальной оси могут быть использованы, например, внешний или внутренний манипулятор.
Для повышения точности измерения корпус измерительной системы может быть выполнен термостатированным.
Остальные комплектующие элементы гравиметра: источник питания, стандарт частоты для определения времени измерений, пересчетные устройства являются стандартными, и их параметры зависят от поставленной задачи, а также условий использования. Например, пересчетные устройства могут быть выполнены на базе микропроцессора, что позволит сразу вычислять g.
По сравнению с прототипом заявляемое устройство отличается значительно меньшими размерами и весом, что даст возможность эксплуатировать его в полевых и морских работах.
Таким образом, совокупность существенных признаков предложенного нового способа и устройства для определения ускорения силы тяжести позволяют получить заявляемый технический результат - повышение точности измерений и удобства эксплуатации
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2011 |
|
RU2461027C1 |
| РЕЗЕРВИРОВАННЫЙ АМОРТИЗИРОВАННЫЙ БЛОК ДАТЧИКОВ МАЛОГАБАРИТНОЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2021 |
|
RU2778428C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА С ПОМОЩЬЮ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2340875C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ОДНООСНЫМ МИКРОМЕХАНИЧЕСКИМ ГИРОСКОПОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2385462C1 |
| Способ генерирования направленных инерционных асимметричных колебаний рабочего оборудования вибрационных машин | 2020 |
|
RU2740282C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА С ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ РОТОРА ГИРОМОТОРА | 2014 |
|
RU2570223C1 |
| СВЧ-ПРИБОР КЛИСТРОННОГО ТИПА | 2009 |
|
RU2393577C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2825190C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2002 |
|
RU2262678C2 |
| СПОСОБ ВЫСТАВКИ МОРСКОЙ БИНС | 2014 |
|
RU2572651C1 |

Предложены способ и устройство измерения ускорения силы тяжести g. В способе определяют угловую скорость вращения волчка и угловую скорость прецессии волчка в прямом и обратном положениях волчка. В качестве волчка используют насаженный на ось диск со сквозными отверстиями в форме сегмента. Угловую скорость вращения волчка определяют по количеству пересечений светового потока сегментами диска в единицу времени. Угловую скорость прецессии волчка определяют по количеству пересечений светового потока осью волчка. Ускорение силы тяжести вычисляют по формуле
1. Способ измерения ускорения силы тяжести g, включающий определение угловой скорости вращения волчка и угловой скорости прецессии волчка в прямом и обратном положениях волчка, при этом в качестве волчка используют насаженный на ось диск со сквозными отверстиями в форме сегмента, угловую скорость вращения волчка определяют по количеству пересечений светового потока сегментами диска в единицу времени, угловую скорость прецессии волчка - по количеству пересечений светового потока осью волчка, а ускорение силы тяжести вычисляют по формуле
2. Устройство для измерения ускорения силы тяжести g, содержащее источник питания, пересчетное устройство, соединенное с системой измерения времени колебаний и оптической системой съема информации, размещенной в корпусе измерительной системы, включающей чувствительный элемент и систему запуска чувствительного элемента, отличающееся тем, что чувствительный элемент выполнен в виде установленного на твердой платформе с возможностью переворота вокруг горизонтальной оси волчка в форме насаженного на ось диска со сквозными отверстиями в форме сегмента, оптическая система съема информации включает два датчика съема информации, каждый из которых состоит из источника и приемника света, при этом один из датчиков установлен с возможностью измерения световых импульсов по количеству пересечений светового потока осью волчка, а другой - с возможностью измерения импульсов по количеству пересечений светового потока сегментами диска в единицу времени, при этом каждый датчик съема информации соединен со своим пересчетным устройством.
| Прибор для ориентирования отклоняющего инструмента при наклонном бурении скважин | 1956 |
|
SU108644A1 |
| Способ восстановления цветочувствительности слоев цветной многослойной пленки | 1949 |
|
SU95042A1 |
| Устройство для определения местоположения движущихся самолетов | 1934 |
|
SU45567A1 |
| WO 1995005615 A1, 23.02.1995. | |||

