Изобретение относится к области определения азимута заданного направления и может быть использовано в геодезии, навигации, топографии, системах прицеливания и наведения.
Из уровня техники известен способ определения азимута на основе свойств одноосных волоконно-оптических гироскопов, при осуществлении которого измеряют проекцию горизонтальной составляющей скорости вращения Земли на ось чувствительности гироскопа. На выходе гироскопа получают синусоидальный сигнал, в котором нулевые значения соответствуют направлениям на восток или запад, а максимум и минимум - на север и на юг. Амплитуда этого сигнала пропорциональна горизонтальной составляющей скорости вращения Земли, а его фаза определяет положение оси чувствительности гироскопа относительно плоскости меридиана (см. В.Е.Прилуцкий, В.Г.Пономарев, В.Г.Марчук и др. «Интерферометрические волоконно-оптические гироскопы с линейным выходом» // Научно-технический журнал «Гироскопия и навигация», №3 (46), 2004, стр.62-68).
Недостатком данного способа является сложность установления моментов времени, когда фаза выходного сигнала соответствует нулевому, максимальному или минимальному значению, что влияет на точность определения азимута в эти моменты.
Кроме того, измерение угловой скорости вращения Земли в данном способе требует использования дополнительного оборудования, а именно двигателя, предназначенного для обеспечения равномерного вращения гироскопа вокруг оси, и датчика измерения угла отклонения оси чувствительности гироскопа от продольной оси объекта, что усложняет измерения, необходимые для определения азимута.
Наиболее близким по технической сущности к заявляемому способу является способ определения азимута (способ аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости), взятый за прототип, включающий предварительную выставку оси чувствительности датчика угловой скорости в горизонт в первое положение и ее повороты в горизонтальной плоскости вокруг собственной оси на заданные углы во второе положение на 180°, а затем в третье положение на 90°, определение показаний датчика угловой скорости в трех указанных положениях и вычисление азимута с использованием полученных показаний по формуле
где Ux1, Ux2, Uх3 - показания напряжения с эталонного сопротивления датчика угловой скорости соответственно в первом, втором и третьем положениях (см. статью S.P.Redkin. "Analitical gyrocompassing by angular rate sensor based on dynamically tuned gyro". Saint Petersburg International Conference on Gyroscopic technology. May 1994).
Известный способ аналитического гирокомпасирования позволяет при измерении угловой скорости вращения Земли производить автокомпенсацию систематических погрешностей, обусловленных дрейфом нуля и отклонениями масштабного коэффициента датчика угловой скорости.
Недостатком известного способа являются значительные погрешности при определении азимута (±30 угловых минут), связанные с практически круговым разворотом датчика угловой скорости в горизонтальной плоскости, имея в виду выставку оси чувствительности датчика угловой скорости в горизонт в первое положение, ее поворот во второе положение на 180°, а затем в третье положение на 90°, и сложностью фиксации датчика угловой скорости на заданных углах, что снижает точность определения азимута.
Компенсация этих погрешностей требует дополнительных замеров полученных фактических углов азимутального поворота гироскопа, а не заданных, и ввода в вычисления азимута соответствующих математических поправок, что усложняет измерение проекций угловой скорости вращения Земли и вычисление азимута.
Кроме того, осуществление поворотов оси чувствительности в горизонтальной плоскости, а именно в первое положение, на 180° и 90° требует длительного интервала времени и дополнительного оборудования, обеспечивающего связь с подвижной частью датчика угловой скорости, что усложняет проведение измерений проекций угловой скорости вращения Земли.
Техническим результатом заявляемого изобретения является упрощение определения азимута за счет упрощения измерений угловой скорости вращения Земли и вычисления азимута, а также повышение точности определения азимута.
Указанный технический результат достигается тем, что в известном способе определения азимута с помощью датчика угловой скорости, включающем предварительную выставку оси чувствительности датчика угловой скорости и ее повороты на заданные углы, определение показаний датчика угловой скорости на заданных углах и вычисление азимута с использованием полученных показаний, согласно изобретению предварительную выставку оси чувствительности датчика угловой скорости осуществляют в вертикаль, после чего ось чувствительности каждый раз поворотом от вертикали устанавливают в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол, в каждом из четырех положений считывают показания датчика угловой скорости, а азимут направления первого положения оси чувствительности определяют по формуле
где Ω1, Ω2, Ω3, Ω4 - показания датчика угловой скорости, пронумерованные по часовой стрелке относительно первого положения оси чувствительности.
Предварительная выставка оси чувствительности датчика угловой скорости в вертикаль и ее установка каждый раз поворотом от вертикали в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол, позволяет разместить датчик угловой скорости в положении, равноудаленном от четырех положений, обеспечив при этом минимальную траекторию поворотов оси чувствительности и ее точную установку на заданный угол, что повышает точность определения азимута.
Последовательная установка оси чувствительности каждый раз поворотом от вертикали в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол, позволяет получить попарные симметричные положения оси чувствительности, что упрощает измерение угловой скорости вращения Земли и вычисление азимута, а также устраняет постоянные погрешности измерений, связанные с влиянием дрейфа нуля и масштабного коэффициента датчика угловой скорости, что также повышает точность определения азимута.
Одинаковые ненулевые острые углы, на которые каждый раз поворотом от вертикали устанавливают ось чувствительности, позволяют зафиксировать ось чувствительности в каждом из четырех положений и исключить ее дальнейшее движение, что упрощает определение азимута за счет упрощения углового позиционирования датчика угловой скорости и повышает точность определения азимута.
При этом повороты оси чувствительности от вертикали на одинаковые ненулевые острые углы не требуют использования дополнительного оборудования для обеспечения связи с подвижной частью датчика угловой скорости, что упрощает проведение измерений угловой скорости вращения Земли и, следовательно, упрощает определение азимута.
Математическая формула, с помощью которой определяют азимут первого положения оси чувствительности датчика угловой скорости, содержит попарные разности считанных с датчика угловой скорости четырех показаний, соответствующие попарным симметричным положениям оси чувствительности, что позволяет исключить из расчетов значение масштабного коэффициента, показание датчика при значении угловой скорости, равной нулю, и величину одинакового ненулевого острого угла, что упрощает определение азимута за счет упрощения его вычисления.
Технических решений, совпадающих с совокупностью существенных признаков заявляемого изобретения, не выявлено, что позволяет сделать вывод о соответствии заявляемого изобретения такому условию патентоспособности как «новизна».
Заявляемые существенные признаки, предопределяющие получение указанного технического результата, явным образом не следуют из уровня техники, что позволяет сделать вывод о соответствии заявляемого изобретения такому условию патентоспособности как «изобретательский уровень».
Условие патентоспособности «промышленная применимость» подтверждено на примере конкретного осуществления заявляемого способа определения азимута с помощью датчика угловой скорости.
На чертеже представлены проекции угловой скорости вращения Земли ω на вертикаль ωв, на горизонтальную плоскость в направлении на север ωг, на юг (-ωг) и в четырех направлениях, расположенных в двух вертикальных ортогональных плоскостях I и II, имеющих с вертикалью одинаковый ненулевой острый угол ε и соответствующих четырем положениям оси чувствительности датчика угловой скорости.
Для определения азимута А с помощью датчика угловой скорости заявляемым способом осуществляют предварительную выставку оси чувствительности датчика угловой скорости в вертикаль, после чего ось чувствительности каждый раз поворотом от вертикали устанавливают в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол ε, равный 30°.
В каждом из четырех положений считывают показания датчика угловой скорости Ω1, Ω2, Ω3, Ω4, которые соответствуют проекциям угловой скорости вращения Земли ω1, ω2, ω3, ω4, включающим две составляющие измеряемой скорости - вертикальную, равную ωвcosε, не зависящую от азимута и постоянную для всех положений, и горизонтальные, равные ωгsinεcosA, -ωгsinεsinA, -ωгsinεcosA, ωгsinεsinA.
Включение в измеряемые величины дополнительной составляющей угловой скорости вращения Земли, а именно вертикальной, равной ωвcosε, при использовании заявляемого способа в средних и высоких географических широтах обеспечивает знакопостоянство измеряемых величин и исключает ошибки, возникающие при определении угловой скорости со значением, близким к нулю.
Показания датчика угловой скорости Ω1, Ω2, Ω3, Ω4, полученные в каждом из четырех положений с учетом масштабного коэффициента К, и показания датчика Ω0, соответствующего нулю угловой скорости, связаны с проекциями угловой скорости следующими уравнениями:




после проведения математических преобразований, а именно вычитания уравнения (3) из уравнения (1) и вычитания уравнения (2) из уравнения (4), получают соответственно выражения:


после чего делят выражение (6) на выражение (5):

и получают формулу для определения значения азимута А как функцию измеряемых параметров:
где Ω1, Ω2, Ω3, Ω4 - показания датчика угловой скорости, пронумерованные по часовой стрелке относительно первого положения оси чувствительности.
Преимуществом данной формулы (8) является ее простота и удобство вычисления азимута, так как в заявляемое математическое выражение входят только считанные с датчика угловой скорости показания, полученные при проведении измерений в четырех положениях, в которые устанавливают ось чувствительности.
Кроме того, в данное выражение не входят конкретные значения величин масштабного коэффициента К, показания датчика Ω0, соответствующего нулю угловой скорости, и величин одинакового ненулевого острого угла ε, то есть на точность определения азимута не влияют равные для всех четырех положений оси чувствительности погрешности в замерах Ω1, Ω2, Ω3, Ω4 и поворотах оси чувствительности на угол ε, что является необходимым условием автокомпенсации указанных постоянных погрешностей.
Таким образом, единственным фактором, влияющим на точность определения азимута, являются случайные погрешности, обусловленные наличием зоны нечувствительности датчика угловой скорости.
Оценку влияния случайных погрешностей Δ Ω1, Δ Ω2, Δ Ω3, Δ Ω4 в данном способе определения азимута осуществляют путем дифференцирования соотношения (8) и с использованием уравнений (1 - 4), в результате чего получают выражение для вычисления дисперсии суммарной погрешности определения азимута ∂[ΔА]:
 .
.
При условии, что дисперсии погрешности каждого измерения равны между собой, то есть ∂[KΔ Ω1]=∂[KΔ Ω2]=∂[KΔ Ω3]=∂[KΔ Ω4]=∂[K Ω], получают следующие выражения:
для суммарной дисперсии ошибки определения азимута 
и для среднеквадратической погрешности
где ϕ - географическая широта места;
σΔА - среднеквадратическая погрешность определения азимута;
σΔω - среднеквадратическая погрешность измерения угловой скорости.
Из представленных выражений видно, что для средних значений широты ϕ и ненулевого острого угла ε, равных, например, ϕ=60° и ε=30° соответственно, величина коэффициента влияния ошибок измерений на точность определения азимута заявляемым способом сведена к минимуму и составляет
то есть для достижения точности определения азимута в 3 угл.мин [˜10-3 рад] требуемая чувствительность датчика угловой скорости должна находиться на уровне 0,005 [угл.сек/сек].
Порог чувствительности, близкий к этой величине, имеют датчики угловой скорости типа ВОГ951, выпускаемые АОЗТ НТК «Физоптика» (г.Москва), и ДУС 500 ПНППК (г.Пермь).
Использование заявляемого способа определения азимута с помощью датчика угловой скорости позволяет упростить определение азимута за счет упрощения измерений угловой скорости вращения Земли и вычисления азимута, а также повысить точность определения азимута.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА С ПОМОЩЬЮ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2021 |
|
RU2759502C1 |
| ГИРОИНКЛИНОМЕТР ДЛЯ ПРОВЕДЕНИЯ ИНКЛИНОМЕТРИЧЕСКОЙ СЪЕМКИ И СПОСОБ ЕЁ ПРОВЕДЕНИЯ | 2024 |
|
RU2829726C1 |
| СПОСОБ ОЦЕНКИ ПОГРЕШНОСТЕЙ ТРЕХОСНОГО ГИРОСКОПА | 2015 |
|
RU2619443C2 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2571199C1 |
| ГИРОГОРИЗОНТКОМПАС | 2016 |
|
RU2617136C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2012 |
|
RU2494405C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| РЕЗЕРВИРОВАННЫЙ АМОРТИЗИРОВАННЫЙ БЛОК ДАТЧИКОВ МАЛОГАБАРИТНОЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2021 |
|
RU2778428C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА С ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ РОТОРА ГИРОМОТОРА | 2014 |
|
RU2570223C1 |
Изобретение относится к области определения азимута заданного направления и может быть использовано в геодезии, навигации, топографии, системах прицеливания и наведения. Способ определения азимута с помощью датчика угловой скорости включает предварительную выставку оси чувствительности датчика угловой скорости и ее повороты на заданные углы, определение показаний датчика угловой скорости на заданных углах и вычисление азимута с использованием полученных показаний, причем предварительную выставку оси чувствительности датчика угловой скорости осуществляют в вертикаль, после чего ось чувствительности каждый раз поворотом от вертикали устанавливают в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол, в каждом из четырех положений считывают показания датчика угловой скорости, а азимут направления первого положения оси чувствительности определяют по формуле

где Ω1, Ω2, Ω3, Ω4 - показания датчика угловой скорости, пронумерованные по часовой стрелке относительно первого положения оси чувствительности. Техническим результат: упрощение определения азимута за счет упрощения измерений угловой скорости вращения Земли и вычисления азимута, а также повышение точности его определения. 1 ил.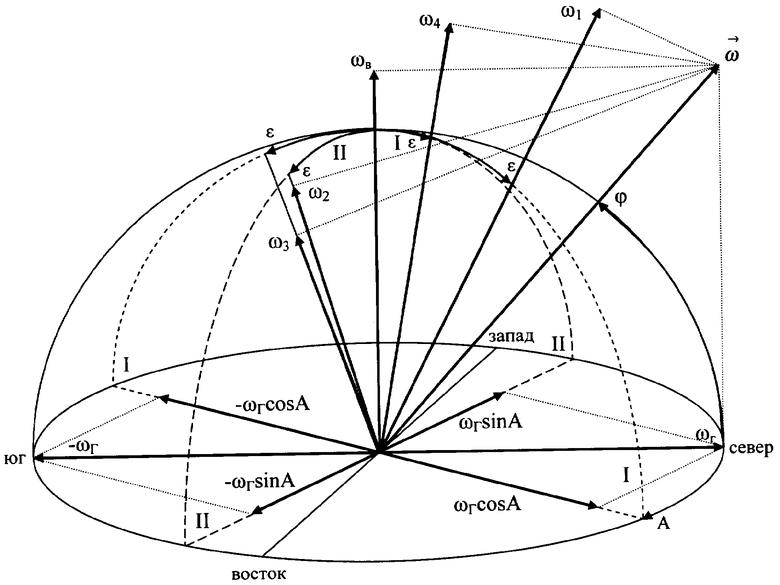
Способ определения азимута с помощью датчика угловой скорости, включающий предварительную выставку оси чувствительности датчика угловой скорости и ее повороты на заданные углы, определение показаний датчика угловой скорости на заданных углах и вычисление азимута с использованием полученных показаний, отличающийся тем, что предварительную выставку оси чувствительности датчика угловой скорости осуществляют в вертикаль, после чего ось чувствительности каждый раз поворотом от вертикали устанавливают в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол, в каждом из четырех положений считывают показания датчика угловой скорости, а азимут направления первого положения оси чувствительности определяют по формуле
 ,
,
где Ω1, Ω2, Ω3, Ω4 - показания датчика угловой скорости, пронумерованные по часовой стрелке относительно первого положения оси чувствительности датчика угловой скорости.
| S.P | |||
| Redkin "Analitical gyrocompassing by angular rate sensor based on dynamically tuned gyro" | |||
| Saint Petersburg International Conference on Gyroscopic technology | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| СПОСОБ АНАЛИТИЧЕСКОГО ГИРОКОМПАСИРОВАНИЯ С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2110767C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ НЕТОЧНОЙ ВЫСТАВКЕ ГИРОСКОПА НА ОБЪЕКТЕ | 2004 |
|
RU2267748C1 |
| JP 2000321070 A, 24.11.2000. | |||

