Изобретение относится к области приборостроения и предназначено для измерения линейных ускорений и угловых скоростей в составе малогабаритной бесплатформенной инерциальной навигационной системы, работающей в условиях сильной вибрации, высокодинамичного беспилотного летательного аппарата с повышенной надежностью.
Наиболее близким к заявляемым техническим решениям является амортизированный блок датчиков малогабаритной бесплатформенной инерциальной системы (Патент РФ на полезную модель №121364, МПК: G01C 21/00, опубл. 20.10.2012 г., бюл. №29), состоящий из амортизируемого корпуса, в состав которого включены три акселерометра, два динамически настраиваемых гироскопа, элементы электропроводки и съема информации. К недостаткам устройства можно отнести недостаточную надежность устройства, вызванную тем, что в условиях сильной вибрации, характерной для полета высокодинамичных беспилотных летательных аппаратов, увеличивается вероятность выхода из строя любого акселерометра или динамически настраиваемого гироскопа, т.к. они содержат подвижные части, подверженные вибрации. При их отказе устройство перестает выполнять свою функцию, что приводит к неисправности системы управления беспилотного летательного аппарата.
Известны навигационная система и корпус навигационной системы (Патент РФ №2702845, МПК: G01C 21/00, опубл. 11.10.2019, бюл. 29), состоящий из корпуса, четырех волоконно-оптических гироскопов, четырех угловых акселерометров, четырех линейных акселерометров и блока электроники. К недостаткам указанного устройства можно отнести большие габариты, низкую устойчивость к механическим нагрузкам, отсутствие амортизированного основания, избыточное количество датчиков для системы управления беспилотного летательного аппарата.
Известен датчик крена и оборотов быстровращающегося управляемого снаряда (Патент РФ на полезную модель №143669, МПК: G01C 21/00, опубл. 27.07.2014 г., бюл. №21), состоящий из двух МЭМС акселерометров, МЭМС датчика угловой скорости, датчика магнитного поля, блока электроники. К недостаткам устройства можно отнести недостаточную надежность устройства, вызванную тем, что при выходе из строя любого акселерометра или датчика угловой скорости устройство перестает выполнять свою функцию, низкую точность МЭМС датчиков, устройство измеряет только угол крена и угловую скорость относительно продольной оси, что недостаточно для управления высокодинамичным беспилотным летательным аппаратом.
Технический результат, создаваемый изобретением, - повышение точности, надежности и механической устойчивости устройства.
Для достижения указанного результата предлагается резервированный амортизированный блок датчиков малогабаритной бесплатформенной инерциальной системы, содержащий корпус, установленный на четыре амортизатора, выполненный в виде двух усеченных правильных четырехугольных пирамид, соединенных основаниями, четыре акселерометра, установленные на первую усеченную пирамиду таким образом, что их оси чувствительности перпендикулярны боковым граням пирамиды и пересекаются в одной точке, два динамически настраиваемых гироскопа, установленные на противоположных гранях второй усеченной пирамиды таким образом, что их оси чувствительности симметричны относительно высоты пирамиды, а
точка пересечения осей каждого динамически настраиваемого гироскопа находится на апофеме боковой грани, разъем и элементы электропроводки.
Применение вместо трех акселерометров четырех, использование сигналов всех четырех измерительных осей двух динамически настраиваемых гироскопов, а также расположение датчиков специальным образом, позволит обеспечить функционирование устройства при выходе из строя любого одного из четырех акселерометров и при выходе из строя любой одной из четырех измерительных осей двух динамически настраиваемых гироскопов. При исправном функционировании всех датчиков точность определения проекций угловой скорости и линейного ускорения возрастает по сравнению с амортизированным блоком датчиков, содержащим три акселерометра и два динамически настраиваемых гироскопа.
Заявителем не выявлены источники, содержащие информацию о технических решениях, идентичных настоящему изобретению, что позволяет сделать вывод о его соответствии критерию «новизна».
Реализация отличительных признаков заявленного устройства позволяет обеспечить повышение точности, надежности и механической устойчивости устройства.
Указанные обстоятельства обуславливают, по мнению заявителя, соответствие данного технического решения критерию «изобретательский уровень». Сущность изобретения поясняется чертежами, на которых изображено:
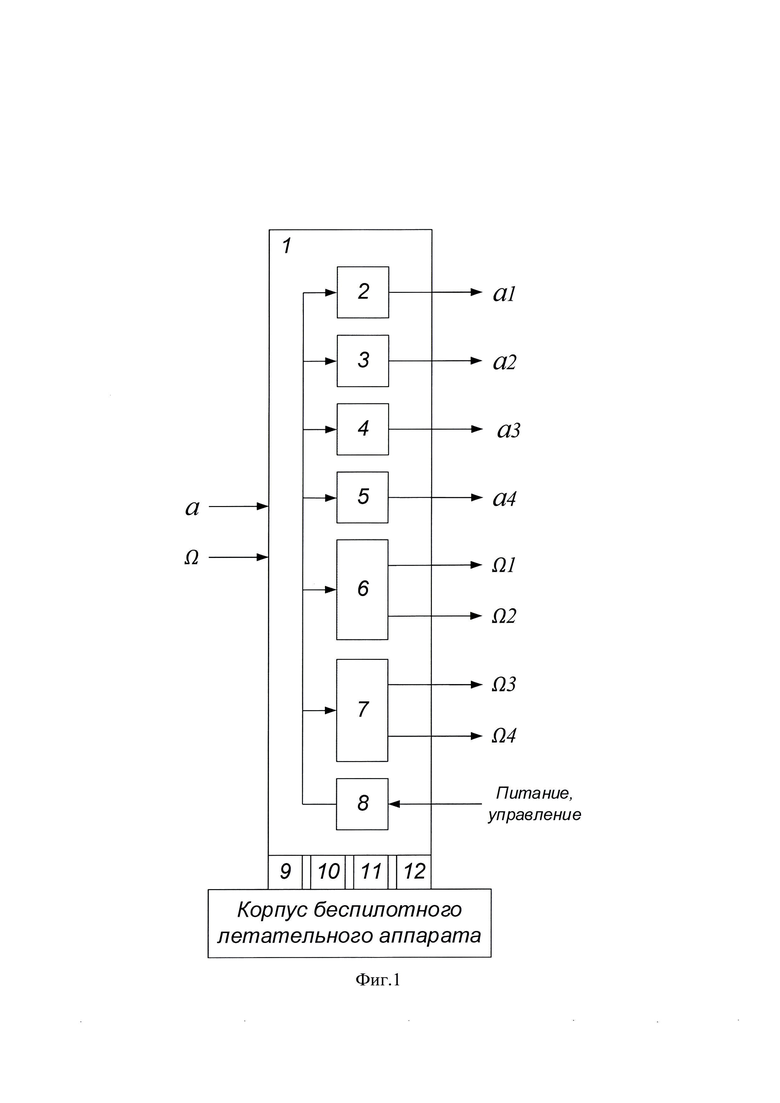
на фиг. 1 - структурная схема резервированного блока датчиков малогабаритной бесплатформенной инерциальной навигационной системы,
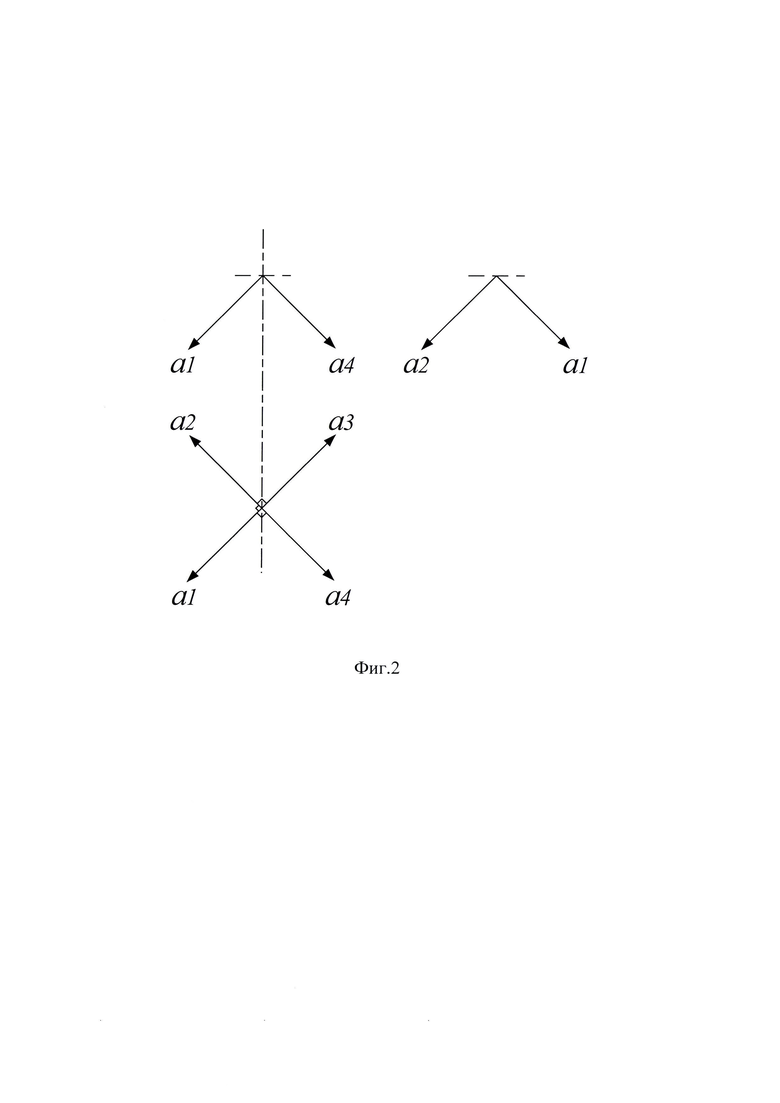
на фиг. 2 - рисунок, показывающий направление измерительных осей акселерометров изделия,
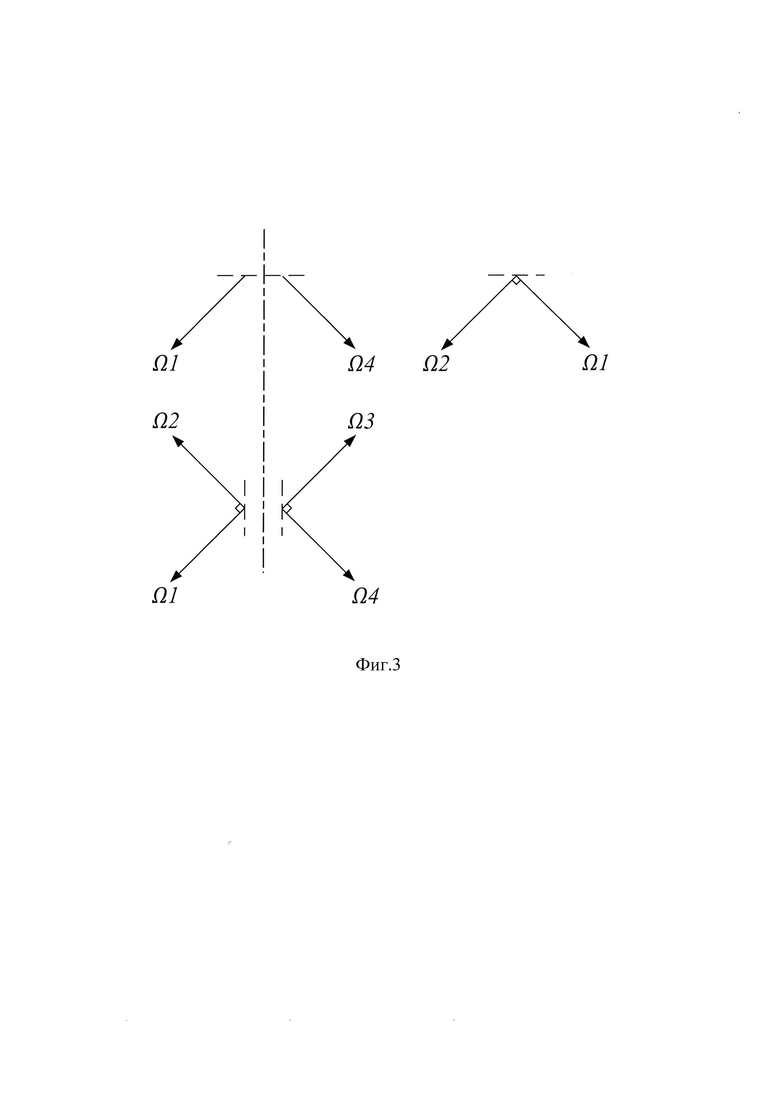
на фиг. 3 - рисунок, показывающий направление измерительных осей динамически настраиваемых гироскопов изделия,
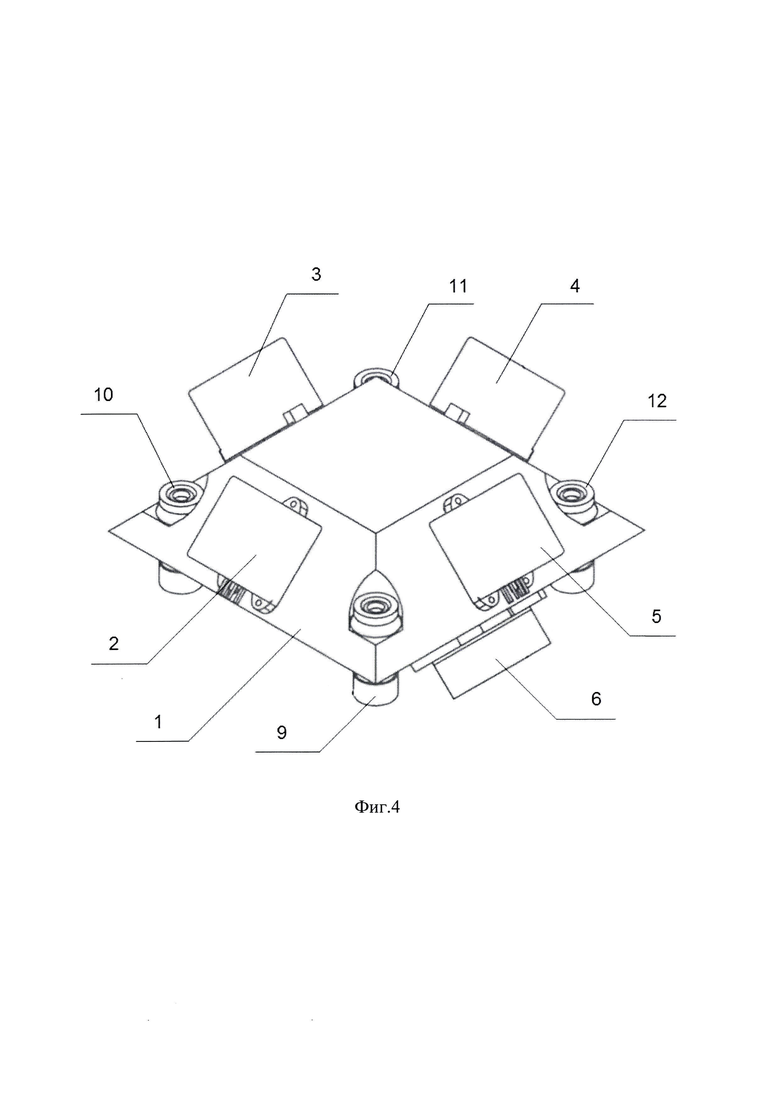
на фиг. 4 - общий вид резервированного блока датчиков малогабаритной бесплатформенной инерциальной навигационной системы,
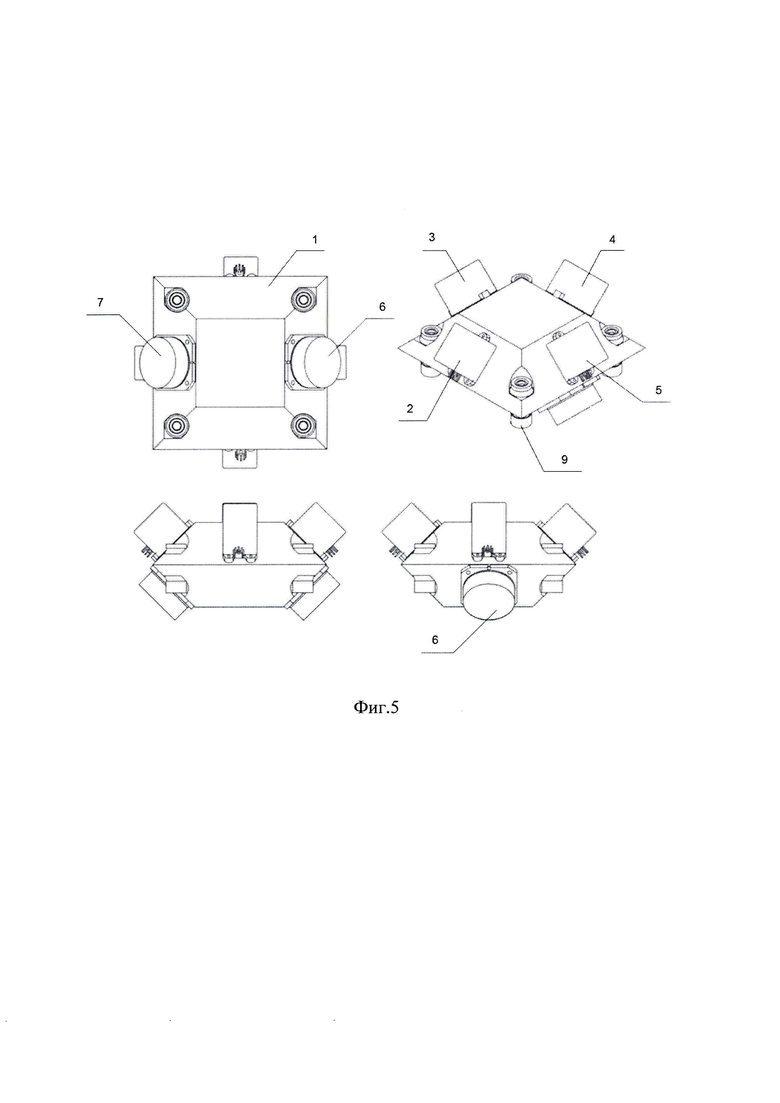
на фиг. 5 - чертеж конструкции резервированного блока датчиков малогабаритной бесплатформенной инерциальной навигационной системы.
Резервированный амортизированный блок датчиков малогабаритной бесплатформенной инерциальной навигационной системы состоит из корпуса 1, на который действуют внешнее линейное ускорение а и угловая скорость Ω, четыре акселерометра 2…5, предназначенные для измерения проекций линейного ускорения а на оси a1, а2, а3, а4, два динамически настраиваемых гироскопа 6, 7, каждый из которых измеряет проекции вектора угловой скорости Ω на две оси Ω1, Ω2 и две оси Ω3, Ω4 соответственно, разъема и элементов электропроводки 8, четырех устройств амортизации 9-12, предназначенных для уменьшения влияния вибрации, характерной для работы двигательной установки высокодинамичных беспилотных летательных аппаратов.
Резервированный амортизированный блок датчиков малогабаритной бесплатформенной инерциальной навигационной системы работает следующим образом. Через разъем и элементы электропроводки 8 на акселерометры 2…5 подается напряжение питания, на динамически настраиваемые гироскопы 6, 7 подается напряжение питания и управляющие сигналы. Происходит включение датчиков линейного ускорения и динамически настраиваемых гироскопов. На корпус 1 и закрепленные на нем четыре акселерометра 2…5 и два динамически настраиваемых гироскопа 6, 7 воздействуют силы, зависящие от вектора линейного ускорения а и вектора угловой скорости Ω. Акселерометры 2…5 измеряют величину проекции вектора линейного ускорения а на оси чувствительности a1, а2, а3, а4. Динамически настраиваемый гироскоп 6 измеряет величину проекции вектора угловой скорости Ω на оси чувствительности Ω1, Ω2. Динамически настраиваемый гироскоп 7 измеряет величину проекции вектора угловой скорости Ω на оси чувствительности Ω3, Ω4. Особенностью данной схемы является избыточность измеряемой информации о воздействующем параметре. Так при одновременном пропадании одного из параметров a1, а2, а3, а4 и одного из параметров Ω1, Ω2, Ω3, Ω4 существует возможность по трем оставшимся параметрам каждого наименования определить значение вектора линейного ускорения а и вектора угловой скорости Ω, воздействующих на корпус 1.
Изобретение может быть использовано для измерения линейных ускорений и угловых скоростей в составе малогабаритной бесплатформенной инерциальной навигационной системы, работающей в условиях сильной вибрации, высокодинамичного беспилотного летательного аппарата с повышенной надежностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ НА МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2577567C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
| Бесплатформенный инерциальный измерительный блок | 2023 |
|
RU2797150C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
Изобретение относится к области приборостроения и предназначено для измерения линейных ускорений и угловых скоростей в составе малогабаритной бесплатформенной инерциальной навигационной системы (БИНС), работающей в условиях сильной вибрации, высокодинамичного беспилотного летательного аппарата с повышенной надежностью. Резервированный амортизированный блок датчиков малогабаритной БИНС содержит корпус, выполненный в виде двух усеченных правильных четырехугольных пирамид, соединенных основаниями, разъем и элементы электропроводки. При этом корпус установлен на четыре амортизатора и содержит четыре акселерометра, установленные на первую усеченную пирамиду таким образом, что их оси чувствительности перпендикулярны боковым граням пирамиды и пересекаются в одной точке, два динамически настраиваемых гироскопа, установленные на противоположных гранях второй усеченной пирамиды таким образом, что их оси чувствительности симметричны относительно высоты пирамиды, а точка пресечения осей каждого динамически настраиваемого гироскопа находится на апофеме боковой грани. Технический результат – повышение точности, надежности и механической устойчивости заявленного блока датчиков малогабаритной БИНС. 5 ил.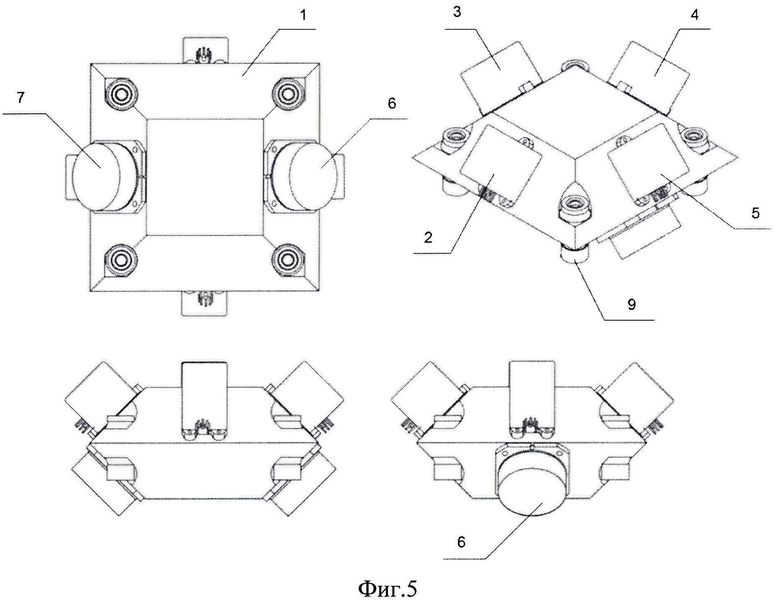
Резервированный амортизированный блок датчиков малогабаритной бесплатформенной инерциальной навигационной системы, содержащий корпус, выполненный в виде двух усеченных правильных четырехугольных пирамид, соединенных основаниями, разъем и элементы электропроводки, отличающийся тем, что корпус установлен на четыре амортизатора и содержит четыре акселерометра, установленные на первую усеченную пирамиду таким образом, что их оси чувствительности перпендикулярны боковым граням пирамиды и пересекаются в одной точке, два динамически настраиваемых гироскопа, установленные на противоположных гранях второй усеченной пирамиды таким образом, что их оси чувствительности симметричны относительно высоты пирамиды, а точка пресечения осей каждого динамически настраиваемого гироскопа находится на апофеме боковой грани.
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| CN 111397601 A, 10.07.2020. | |||

