Изобретение относится к области систем автоматического регулирования. Оно может быть использовано при автоматизации работы различных промышленных объектов (химических реакторов, теплообменников и др.), имеющих в своей структуре несколько каналов управления одной технологической величиной (температуры, давления и т.п.), путем использования одного или нескольких контуров регулирования, подключаемых в зависимости от динамических и энергетических характеристик объекта и особенностей возмущающего воздействия.
Известны системы регулирования, использующие для поддержания значения технологической величины два управляющих воздействия (см. например, Е.Г. Дудников и др. «Автоматическое управление в химической промышленности». М.: Химия, 1987. - 368 с.), где один из каналов управления, наилучший в отношении качества переходных процессов, является неэкономичным, в то время как другой канал управления наоборот является экономичным, но уступает по качеству переходных процессов. В результате в лучшем с позиции качества управления для повышения быстродействия используют П-регулятор, а в экономичном канале управления ПИ- или ПИД-регулятор с целью исключения статической ошибки. При построении такой системы возникают трудности, связанные с расчетом системы регулирования и подключения других каналов управления, лучших с позиции максимального подавления действующего возмущения (помехи).
Цель предлагаемого изобретения - улучшение качества регулирования и энергетической эффективности управления технологическим объектом за счет выбора динамически эффективных (лучших в отношении качества переходного процесса) и энергетически эффективных (лучших в отношении энергосбережения) каналов регулирования и включения их в работу в зависимости от частотных характеристик возмущающих воздействий (сигналов помех) и реакции на них отдельных контуров регулирования. Кроме того, ввиду разделения частотных спектров работы контуров управления упрощается расчет настроек соответствующих регуляторов.
Химико-технологическая система (ХТС) предназначена для целенаправленной переработки определенного сырьевого потока вещества в необходимый продукт при энергетических воздействиях на исходное вещество и протекании химических превращений. ХТС можно охарактеризовать соответствующей структурой, определяющей взаимосвязи между ее элементами, и совокупностью переменных (координат), определяющих ее состояние в данный момент. Для управляемых ХТС наиболее характерными являются три типа координат: управляемые координаты, управляющие и координаты, соответствующие внешним возмущениям.
В общем виде в установившемся состоянии взаимосвязь между этими координатами можно представить совокупностью алгебраических уравнений в неявной форме.

где 


k - совокупность конструктивных параметров;
v - стехиометрические координаты и физико-химические константы;
η - КПД элементов ХТС.
В состав вектора П входят также и различные энергетические потоки, используемые для ведения технологического процесса в рассматриваемой ХТС.
Эффективность функционирования ХТС обычно оценивается с помощью какого-либо критерия эффективности, в выражение которого практически всегда входят управляемые и управляющие координаты:

D - параметры, влияющие на эффективность работы ХТС.
Задача оптимизации режима функционирования ХТС заключается в подборе такого вектора управляющих координат 

где 
Q - индекс, обозначающий вид варьируемых переменных (

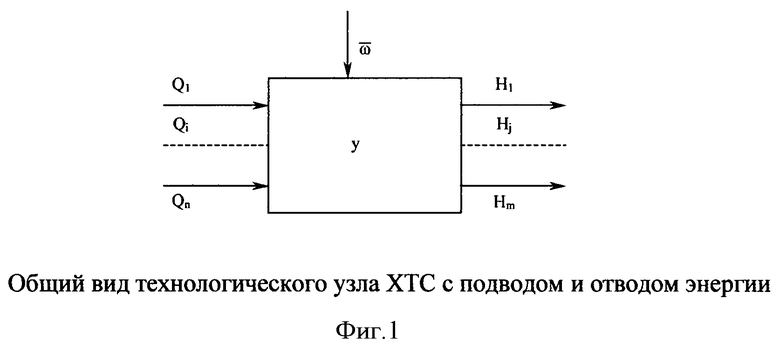
В подавляющем большинстве случаев в ХТС с целью теплового или химического воздействия на протекающие процессы используются различные источники энергии: электроэнергия, горючие газы, пар и т.д. Аналогично, возможно использование "на стороне" различных видов вторичных энергетических ресурсов (ВЭР), получаемых в процессе функционирования рассматриваемой конкретной ХТС. Отдельные технологические узлы ХТС, использующие внешнюю энергию и (или) производящие ВЭР, построены обычно так, как приводится на рисунке (см. фигуру 1), где Qi - поток i-го вида энергии, подводимой к узлу ХТС; Hj - поток j-го вида энергии, отводимой от узла; y - управляемая переменная, характеризующая работу технологического узла.
В общем виде зависимость между переменной y и потоками Qi и Нj нелинейная:
f(y,Q1,…,Qn, H1,…,Hm)=0
Однако для технологических процессов, основу которых составляют энергетические превращения, в установившихся режимах можно с достаточной степенью точности представить эту зависимость в линеаризованной форме

где ki, cj - коэффициенты, отражающие балансовые и кинетические зависимости. Критерий эффективности типа (2) для такого узла ХТС, отражающий условия энергетических преобразований, Iэ=Φ(Qi,Hj), i∈I, j∈J будем называть критерием энергосбережения. Часто его можно представить в виде аддитивной функции:

где ai, bj - коэффициенты веса; I и J - множества целых чисел соответственно из ряда 

Причем, необходимо иметь в виду, что отдельные входные и выходные потоки из (4) являются внешними возмущениями и не входят в критерий (5).
Задача оптимизации процесса энергетических преобразований в рассматриваемом узле может выглядеть, например, как 
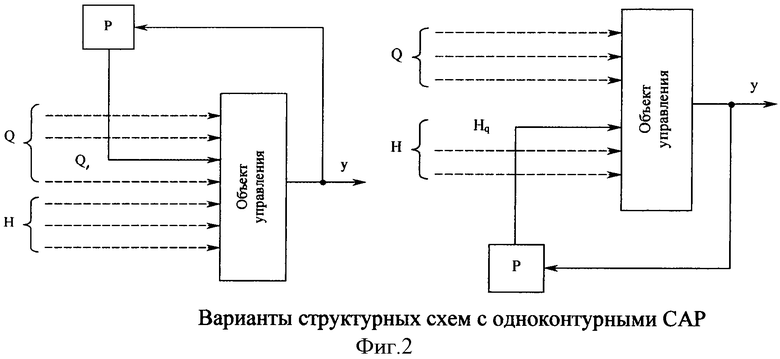
Спецификой таких узлов является то, что в химической технологии часто можно найти не одну, а несколько управляющих координат, воздействующих на одну и ту же управляемую переменную. Отсюда возникает возможность выбора той или иной управляющей координаты для организации CAP. Но в любом случае в типовой структуре CAP для управления какой-либо переменной у используется только одна регулирующая координата (обычно лучшая по динамическим показателям), и структура объекта с CAP выглядит так, как, например, показано на фигуре 2, где Р - регулятор. Управляющие координаты Ql и Hq можно условно назвать динамически эффективными, т.е. позволяющими на их основе построить динамически эффективные CAP. Однако использованные в CAP управляющие координаты Ql и Hq могут быть далеко не лучшими с точки зрения критерия эффективности (5), т.е. с точки зрения энергосбережения.
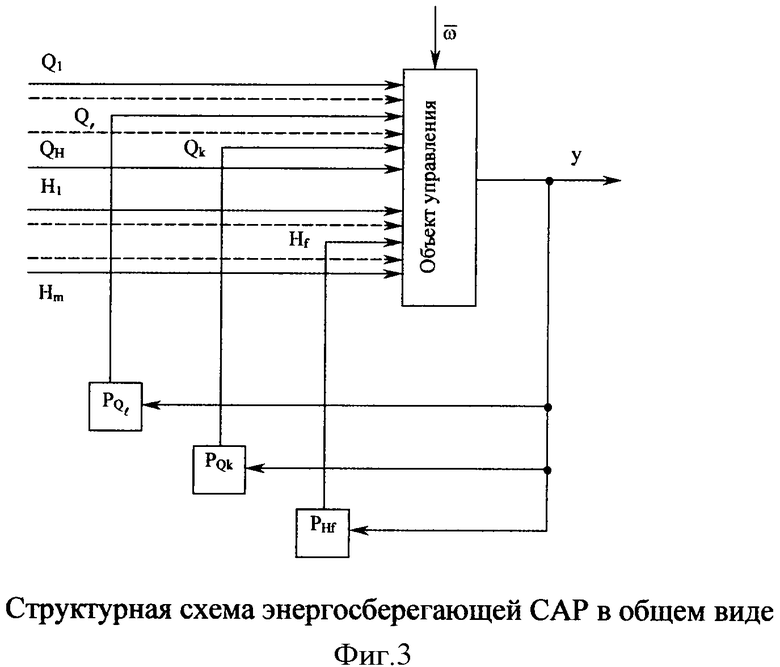
Задачу энергосбережения и одновременного достижения эффективного управления в условиях реально действующих возмущений предлагается решить с помощью применения многоконтурных CAP, использующих для целей стабилизации одной переменной y(t) одновременно несколько управляющих координат. Типовая структурная схема такой CAP показана на фигуре 3, где Qℓ, Qк, Hf - управляющие координаты; PQℓ, PQk, PHf - регуляторы в контурах с соответствующими управляющими координатами. Аналогично понятию динамически эффективной управляющей координаты (в данном случае Ql) введем понятие энергоэффективных координат, позволяющих существенно воздействовать на критерий энергосбережения (Qk, Hf и т.д.).
CAP, построенные в соответствии со структурной схемой, показанной на фигуре 3, и минимизирующие критерий эффективности (5), будем называть энергосберегающими CAP (ЭСАР).
Действительно, для стабилизации переменной у при стохастическом изменении 

или, учитывая, что в статике должно иметь место M{y}=yзад:

где Кобi - коэффициенты усиления по соответствующим каналам управления ЭСАУ;
Kобωj - коэффициенты усиления по каналам возмущения ωj;
yзад - заданное значение стабилизируемой переменной.
Если энергетический критерий (5) представить в форме:
где αi - соответствующие коэффициенты веса,
то оптимум в задаче min Iэ при типовых ограничениях на управление ui

находится в одной из вершин гипермногогранника, определяемого соотношениями (7), (9).
Таким образом, анализ особенностей организации типовых ХТС приводит к выводу, что оптимизировать установившиеся режимы их работы по критерию энергосбережения возможно с помощью ЭСАР, обладающих структурной избыточностью в управлении. Как следствие этого такие ЭСАР должны обладать специфической многоконтурностью с числом управлений, превышающим число управляемых переменных.
Теперь рассмотрим эту задачу с учетом условий динамических режимов. Расположение гиперплоскости (7), соответствующей конкретному технологическому режиму управляемой ХТС, в первую очередь определяется совокупностью внешних возмущающих факторов 
В соответствии с этим в стохастическом возмущении ωj(t) можно условно выделить две составляющие: высокочастотную 



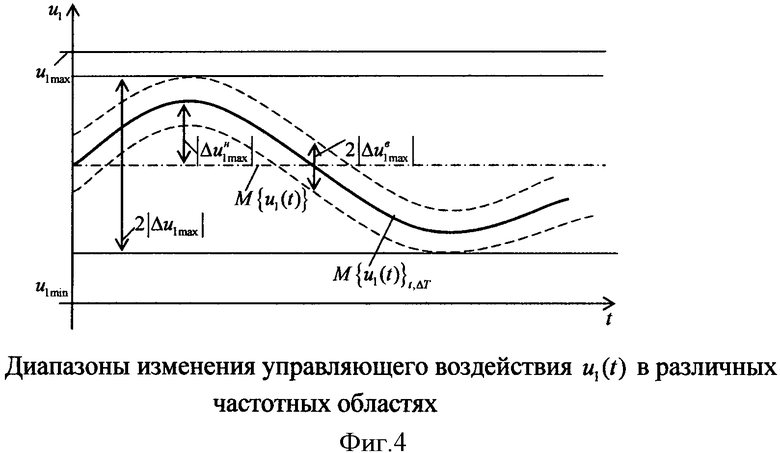
Предположим, что существует управляющая координата u1(t), достаточно эффективно стабилизирующая переменную y(t) во всем частотном диапазоне изменения ω(t). Принятое разбиение возмущающего воздействия на ωв(t) и ωн(t) позволяет аналогично представить и управление u1(t) - в области высоких и инфранизких частот. Причем можно ввести в рассмотрение величины 

Анализ графика (фигура 4) позволяет сделать вывод, что минимизировать (или максимизировать) величину в соответствии с требованием критерия энергосбережения (8) можно путем уменьшения значений 

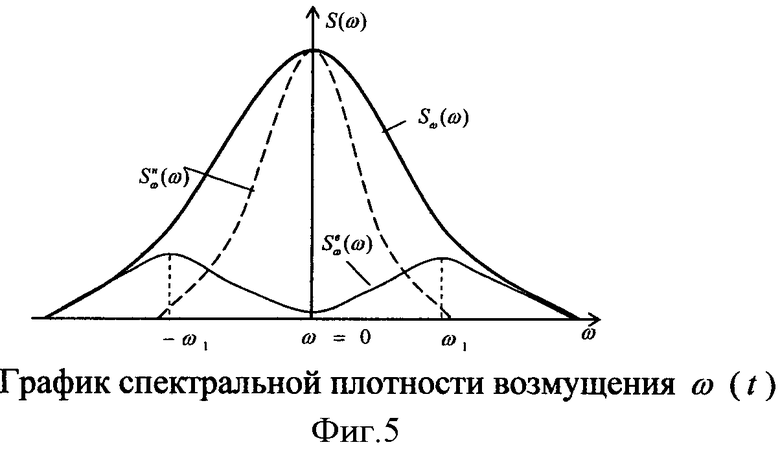
Иными словами, спектральная плотность возмущающего воздействия ω(t) как бы разбивается на высокочастотную и инфранизкочастотную части (фигура 5) и организуется двухконтурная CAP с управляющими координатами u1(t), ui(t), i≠1. Причем первая из них обладает более высокими динамическими свойствами, а вторая - более эффективна в смысле критерия энергосбережения.
Таким образом, CAP имеет избыточное количество управляющих координат (как минимум две управляющие переменные), каждая из которых, в зависимости от частотных свойств и влияния на критерий энергосбережения, настраивается на подавление соответствующей части спектра внешнего возмущения. Естественно предположить, что если существует m управляющих координат, отличающихся по частотным свойствам и влиянию на критерий энергосбережения, то график Sω(ω) может быть аналогичным образом представлен в виде совокупности m составляющих, каждая из которых подавляется соответствующим образом настроенным контуром с управляющей координатой ui(t). Т.е. вновь возникает структура CAP, приведенная на фигуре 3.
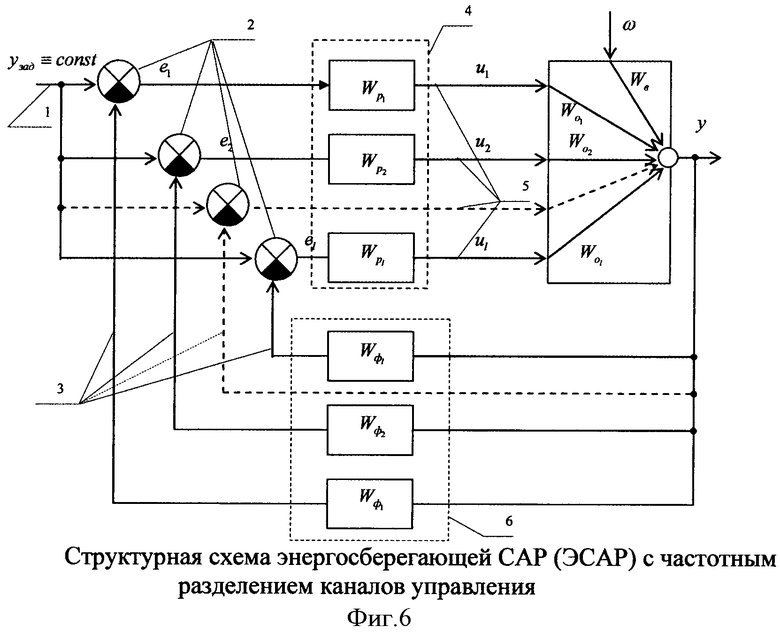
Структура многоконтурной CAP с частотным разделением каналов управления (см. фигуру 6) содержит входной канал задания 1, алгебраические сумматоры 2, на которых происходит сравнение сигнала задания 1 с сигналом обратной связи 3, блок регуляторов 4 с соответствующими каналами управления 5. Особенность предлагаемой структуры определяется наличием полосовых фильтров 6 в каждом из каналов управления. В предлагаемой структуре для разделения частот в каналах управления используются идеальные полосовые фильтры, которые имеют частотные характеристики следующего вида:

где ωj - частота среза по j-тому каналу; 
Использование идеальных фильтров не привносит в систему дополнительного запаздывания и способствует тому, что замкнутая система остается устойчивой при условии, что отдельные контуры регулирования изначально устойчивы.
Таким образом, согласно предлагаемой структуре многоконтурной системы регулирования с частотным разделением каналов управления благодаря использованию идеальных полосовых фильтров происходит поочередная работа каждого из контуров регулирования в отдельности, что в конечном итоге позволяет достичь требуемой динамической и энергетической эффективности работы ЭСАР в целом. Кроме того, упрощается процедура поиска оптимальных настроечных параметров регуляторов, так как настройки одного регулятора не зависят от настроечных параметров другого.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ОДНОФАЗНОГО КОЛЛЕКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2491706C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| ДИНАМИЧЕСКИЙ МОНИТОРИНГ МОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745984C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| СПОСОБ КОНТРОЛЯ И ИЗМЕРЕНИЯ ПЛАВНОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2069366C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ПО ЗАДАННЫМ ПОКАЗАТЕЛЯМ КАЧЕСТВА (ВАРИАНТЫ) | 2003 |
|
RU2261466C2 |
Изобретение относится к области систем автоматического регулирования. Оно может быть использовано при автоматизации работы различных промышленных объектов, имеющих в своей структуре несколько каналов управления одной технологической величиной, путем использования одного или нескольких контуров регулирования, подключаемых в зависимости от динамических и энергетических характеристик объекта и особенностей возмущающего воздействия. Технический результат - улучшение качества регулирования и энергетической эффективности управления технологическим объектом за счет выбора динамически эффективных и энергетически эффективных каналов регулирования и включения их в работу в зависимости от частотных характеристик возмущающих воздействий и реакции на них отдельных контуров регулирования. Кроме того, ввиду разделения частотных спектров работы контуров управления упрощается расчет настроек соответствующих регуляторов. Структура многоконтурной CAP с частотным разделением каналов управления содержит входной канал задания, алгебраические сумматоры, на которых происходит сравнение сигнала задания с сигналом обратной связи, блок регуляторов с соответствующими каналами управления. Особенность предлагаемой структуры определяется наличием полосовых фильтров в каждом из каналов управления. В предлагаемой структуре для разделения частот в каналах управления используются идеальные полосовые фильтры, которые не привносят в систему дополнительного запаздывания и способствуют тому, что замкнутая система остается устойчивой при условии, что отдельные контуры регулирования изначально устойчивы. Таким образом, согласно предлагаемой структуре многоконтурной CAP с частотным разделением каналов управления благодаря применению идеальных полосовых фильтров происходит поочередная работа каждого из контуров регулирования в отдельности, позволяя в итоге достичь требуемой динамической и энергетической эффективности работы ЭСАР в целом. 6 ил.
Энергосберегающая система автоматического регулирования, содержащая входной канал задания, алгебраические сумматоры, на которых происходит сравнение сигнала задания с сигналом обратной связи, блок регуляторов с соответствующими каналами управления (в простейшем случае - двумя), обладающими различными энергетическими и динамическими характеристиками, отличающаяся тем, что в каждом из каналов управления, с целью повышения динамической и энергетической эффективности работы системы управления в целом, присутствуют полосовые фильтры, способствующие разделению и независимому включению в работу каждого из контуров регулирования, настроенных, в зависимости от их частотных свойств и влияния на критерий энергосбережения, на эффективное подавление соответствующей части спектра внешнего возмущения.
| ДУДНИКОВ Е.Г | |||
| Автоматическое управление в химической промышленности | |||
| - М.: Химия, 1987, стр.61-62, рис.1.44 | |||
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| US 3287615 A1, 22.11.1966 | |||
| US 20040243258 A1, 02.12.2004. | |||

