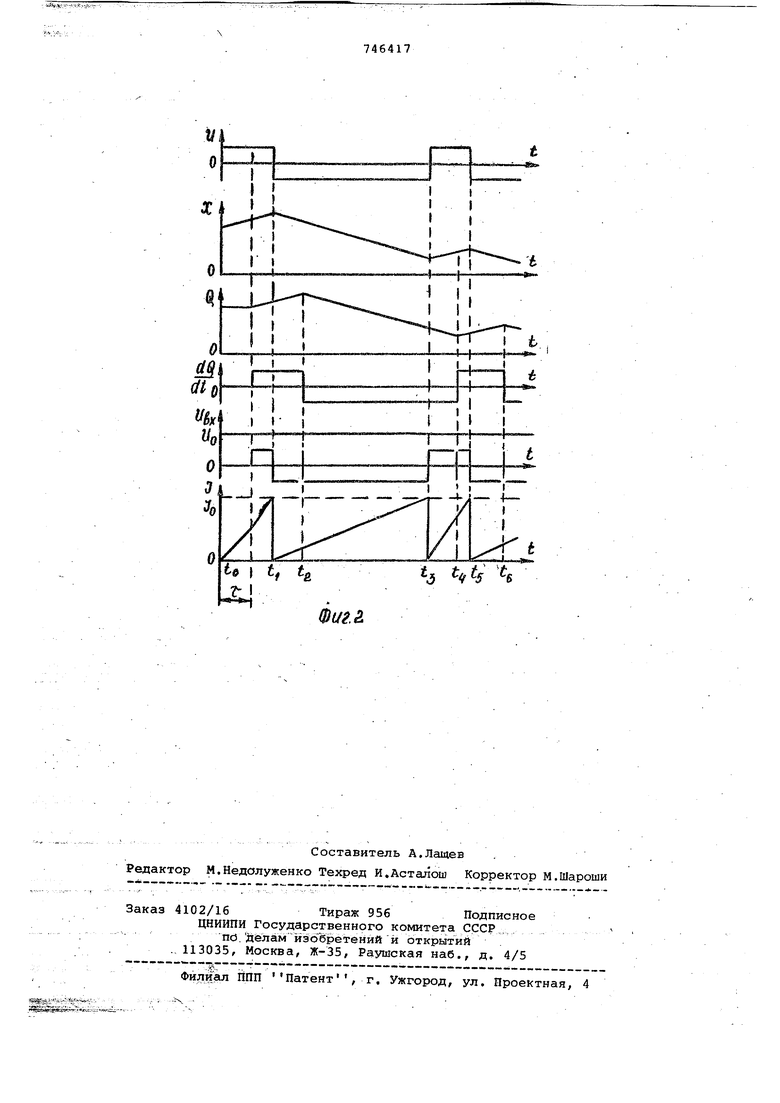
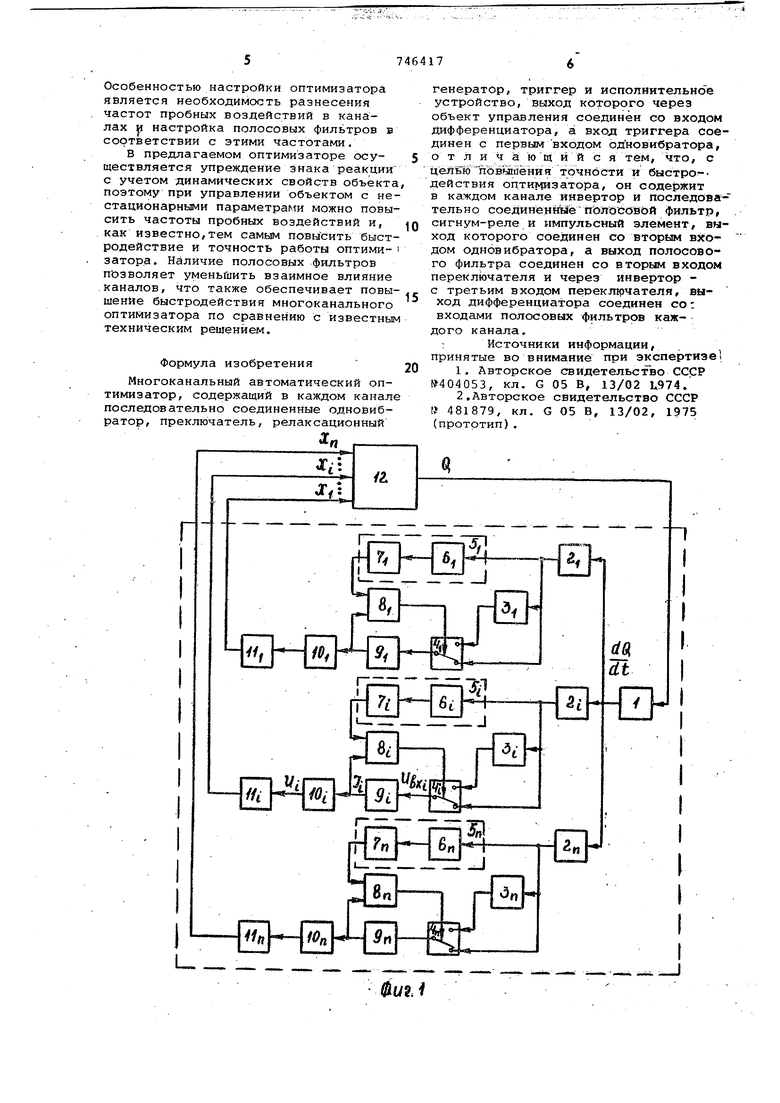
Изобретение относится к автомати- зации управления, в частности к экстремальному управлению, Известны многоканальные автомати ческие оптимизаторы,позволяющие нахо дить экстремальное значение функции многих переменных 1. Однако для устойчивой работы этих устройств, при оптимизации инерционного объекта с запаздыванием, необходимо снижение частот пробпых воздействий, что приводит к увеличению времени поиска и амплитуды колебаний в экстремуме. Наиболее близким техническим ре шением к предлагаемому является многоканальный автоматический оптимизатор с упреждением знака реакции на пробные воздействия, содержащий в каждом канале последовательно соединенные одновибратор, переключатель, релаксационный генератор, триггер и исполнительное устройство, выход ко торого через объект управления соеди нен со входом дифференциатора, а вхо триггера соединен с первым входом од новибратора 2. Недостаток оптимизатора - низкая точность и малое быстродействие. Целью предполагаемого изобретения является повышение быстродействия и точности работы системы при оптимизации нестационарных инерционных объектов с запаздыванием. Поставленная цельдостигается тем, что.оптимизатор содержит в каждом к нале инвертор и последовательно соединенные полосовой фильтр, сигнумреле и импульсный элемент выход кото-, рого соединен со вторым входом одновиб.ратора, а выход по.лосового, фильтра соединен со вторым входом переключателя и через инвертор - с третьим входом переключателя, выход дифференциатора соединен со входами полосовых фильтров каждого канала. На фиг. 1 показана блок-схема предлагаемого устройства; на фиг, 2 - временные диаграммы работы Устройство (фиг.1) содержит дифференциатор 1 и п однотипных (по Числу независимых йеременных) каналов, каждый из которых содержит полосовой фильтр 2, инвертор 3, переключатель 4, элемент адаптации 5, состоящий из сигнум-реле б и импульсного элемента 7,одновибратор В, управляемый релаксационный генератор 9, триггер 10 с счетным уходом и исполнительное устройст 11.объект;управления 12. В каждом канале оптимизатора выхо полосового фильтра 2 соединен с вход инвертора 3 и одним входом переключа теля 4, а выход инвертора 3 соединен с другим входом переключателя 4. Выход полосового фильтра 2 также соединен с входом элемента адаптации 5. Е:лхе« элемента адаптации 5, состоящего из последовательно соединенных сигнум-реле 6 и импульсного элемента 7, соединен с запускающим входом одновибратора 8, выход которого соединен с. управляющим входом переключателя 4, а выход переключателя 4 соединен с входом управляемого релаксационного генератора 9, выход которого соединен с возвращающим вхо дом одновибратора 8 и входом триггера 10. Выход триггера 10 соединен с входом исполнительного устройства 11, выход которого подключён к соответствующему входу объекта, управления 12, Выход объекта управления 12 соединен с входом диференциатора 1, выход которого соединен с входами по лосовых фильтров всех каналов оптимизатора. Принцип действия предлагаемого ус ройства рассматривается на примере работы одного канала при управлении объектом, состоящим из последователь но соединенных звена запаздывания и статического звена с модульной харак теристикой. Полосовой фильтр на входе канала оптимизатора (фиг.1) необходим в многоканальной системе, поэтому для понимания принципа действия одного канала полосовой фильтр исключают . Работа одного канала оптимизитора иллюстрируется временными диаграммами (фиг.2). Пусть в момент времени to на входе триггера 10, сигнал U; положительный, тогда х на выходе ис полнительного устройства 11} увеличивается, для случая исполнительного устройства интегрирующего типа. Сигнал Q на выходе объекта 12 увеличивается лишь через время запаздывания С , поэтому на выходе дифференциатор 1 появляется сигнал т- через время t . На вход управляемого генератора 9 j , состоящего из интегратора с поро говым элементом, подается сигнал Up , где UQ - постоянная величина. При достижении сигналом на выхо де интегратора величины порога срабатывается Зд поро.говогбэлемента, генера тсэр 9} срабатыгоает и изменяет состоянТия триггера 10J и однорибратора 8,. Одновибратор изменяет состо яние переключателя 41, т.е. Подключает на вход генератора 9J входной, сигнал через инвертор 3J После йэ .мёнения состояния триггера в момент tj производная | изменит свой знак лишь в момент t через время запаэL5fei :j :iiy - :..V.-.: - .- -, /S,,, давания Т , но с момента t сигнал вход генератора 9; поступает через инвертор 3;; , т.е. с измененным знаком, который будет на выходе дифференциатора 1 лишь через время. D . В момент tg сигнал на выходе диффе- ренциатора изменяет знак в результате чего элемент адаптации 54 возвращащает одновибратор 8 в исходное состояние и сигнал на вход генератора подается минуя инвертоп 3 } . Таким образом, на каждом полупериоде пробного воздействия осуществляется упреждение знака реакции на впемя запаздывания i . . При изменении времени запаздывания f изменяется и интервал упреждения, т.е. фаза сигнала Uj,x; всегда соответствует фазе сигнала Uj независимо от сдвиха фазы сигнала в объкте управления (фиг.2 соответственно моменты tjt.H . Следует также отметить, что применение одновибратора 81 для управления переключателем 4( приводит к повышению надежности всей системы. В случае потери импульса на возврат одновибратора, а соответственно и переключателя 4| в исходное положение, при врейени выдержки одновибратора, равному нескольким полупериодам пробных воздействий, одновибратор сам возвращается в исходное положение, т.е. в зависимости от времени выдержки одновибратора при потере импульса канал не полностью работоспособен только в течение нескольких полупериодов пробных воздействий. При управлении объектом, линейная часть которого состоит из двух последовательно соединенных инерционных звеньев, изменение знака пробного воздействия на входе объекта повлечет изменение знака реакции на это пробное воздействие лишь через воемя, определяемое динамическими параметрами объекта, .Этот момент ссГОТветствует моменту изменения знака первой производной выходной величины объекта, причем при стационарных параметрах объекта время с Момента изменения производной выходной величины объекта различный.В предлагаемом автоматическом оптимизаторе и осуществляется упреждение знака реакции с момента изменения состояния триггера до момента перехода через нуль первой производной составляющей выходного сигала объекта, имеющей частоту пробных воздействий этого же канала. Вкщеление этой составляющей из выходного сигнала дифференциатора 1 осуществляется - полосовыми - фильтрами 2i , 2; 2„. - Многоканальный автоматический оптимизатор состоит из параллельно HI аналогично работающих каналов, независимость работы которых обёспечйвается полосовыми фильтрами 2i 2j 2. Особенностью настройки оптимизатора является необходимость разнесения частот пробных воздействий в каналах настройка полосовых фильтров в соответствии с этими частотами. В предлагаемом оптимизаторе осуществляется упреждение знака реакции с учетом динамических свойств объекта поэтому при управлении объектом с нестационарными параметрами можно повысить частоты пробных воздействий и, как известно,тем самым повысить быстродействие и точность работы оптимизатора. Наличие полосовых фильтров позволяет уменьшить взаимное влияние каналов, что также обеспечивает повышение быстродействия многоканального оптимизатора по сравнению с известным техническим решением. Формула изобретения Многоканальный автоматический оптимизатор, содержащий в каждом канал последовательно соединенные одновибратор, преключатель, релаксационный генератор, триггер и исполнительное устройство, выход которого через объект управления соединен со входом Дифференциатора, а вход триггера соединен с первым входом одновибратора, о т л и ч а и и с я тем, что, с цёлШпбвышёнйя точности и быстро-действия onTHNDisaTOpa, он в каждом канале инвертор и последовательно соединеннУё полосовой фильтр, сигнум-реле и импульсный элемент, выход которого соединен со вторым входом одновибратора, а выход полосового фильтра соединен со вторым входом переключателя и через инвертор с третьим входом перекл рчатвля, выход дифференциатора соединен со: входами полосовых фильтров каж- дого канала. Источники информации, принятые во внимание при экспертизе; 1. Авторское свидетельство СССР №404053, кл, G 05 В, 13/02 L974. 2,Авторское свидетельство СССР № 481879, кл. G 05 В, 13/02, 1975 (прототип).
Ф1/г&
г
jj ц 5 В
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный автоматический оптимизатор | 1974 |
|
SU481879A1 |
| Устройство для поиска экстремума | 1983 |
|
SU1091119A1 |
| Экстремальная система управления | 1984 |
|
SU1241191A1 |
| МНОГОКАНАЛЬНОЕ АВТОМАТИЧЕСКОЕ УСТРОЙСТВО | 1973 |
|
SU388245A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Устройство для управления неустойчивым экстремальным объектом | 1982 |
|
SU1034015A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU769490A1 |
| АВТОМАТИЧЕСКИЙ ЭКСТРЕМАЛЬНЫЙ ОПТИМИЗАТОР | 1968 |
|
SU219657A1 |
| Система управления | 1983 |
|
SU1168896A1 |