ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству, предназначенному для обеспечения подвижности тела человека и, в особенности, для приведения в движение позвоночной оси, артикуляции таза и нижних конечностей относительно этой позвоночной оси.
Изобретение, таким образом, является частью области исследований такой подвижности тела с помощью использования платформы или пластины, выполненной с возможностью колебаться по множеству осей, проходящих через ее центр, причем такие различные колебания могут осуществляться случайным образом.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
На сегодняшний день предложены различные аппараты для осуществления операций коррекции и реабилитации общей биомеханики. Их назначением больше является, в частности, обеспечение мышечных тренировок спортсменов.
Эти аппараты содержат обычно платформу, способную совершать колебания относительно центрального опорного шарнира, описанную, например, в документах US-А-2827894 и US-А-4290601. Движение платформы приводит к потере равновесия находящимся на ней человеком, что вызывает реакцию со стороны человека и обеспечивает искомое придание подвижности различным биомеханическим элементам, в частности, позвоночному столбу, тазовому поясу конечностей и суставам.
В документе ЕР 1023111 описано, например, также устройство, в котором платформа осуществляет одновременное вращательное движение и колебательное движение. Другими словами, кинематика устройства, описанного в этом документе, ограничена вращательным колебанием с регулируемыми амплитудой и скоростью. Однако такое устройство оказывается особенно сложным в изготовлении и, кроме того, колебательные движения ограничены амплитудой и самой конструкцией, при этом случайный характер колебаний не может быть получен по тем же причинам.
В документе WO 2007/141429 предложено, например, также устройство рассматриваемого типа, но которое также имеет ограниченные степени свободы колебаний из-за типа суппорта и привода платформы, которой оно снабжено, что уменьшает возможности и эффективность лечения из-за отсутствия любого случайного характера колебаний.
Изобретение предлагает устройство рассматриваемого типа, которое придает платформе множество степеней свободы колебания, то есть способное позволить платформе осуществлять множество возможных качаний относительно оси, проходящей, по существу, через ее центр. Из этого множества вытекает возможность осуществлять дискретные качания и придавать колебанию случайный характер, способствующий, в частности, реабилитации, а также тренировкам, необходимым спортсменам.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение предлагает устройство для придания телу подвижности, содержащее приемную платформу, подвижную относительно неподвижного основания, предназначенную для удержания тренируемого человека в стоячем положении.
В соответствии с изобретением платформа соединена с основанием двойным шарнирным соединением и приводится в колебательное движение относительно оси, проходящей, по существу, через ее центр, с помощью приводов, соединенных каждый шарнирным соединением с одним и тем же валом, жестко соединенным с упомянутой платформой, при этом сами упомянутые приводы шарнирно соединены с основанием.
В частности, платформа шарнирно установлена на верхней раме, задающей первую, по существу горизонтальную шарнирную ось, при этом сама рама шарнирно установлена на основании по второй шарнирной оси, по существу, горизонтальной и перпендикулярной упомянутой первой оси.
Упомянутая платформа снабжена осью или центральным валом, размещенным перпендикулярно относительно ее плоскости, а приводы, в количестве двух, жестко соединены со свободным концом упомянутого вала с помощью кардана, при этом направления работы упомянутых приводов, по существу, перпендикулярны одно другому.
Каждый из этих приводов образован силовым цилиндром, в частности, электрическим, точка крепления которого к станине образована шарнирной связью.
Предпочтительно, устройство для придания подвижности телу по изобретению объединено с рукоятками и, в общем случае, любым средством для удержания, позволяющим человеку, который подвергается лечению или тренировке, держаться с помощью верхних конечностей, учитывая нарушения равновесия, которым он подвергается при колебаниях платформы, на которой он находится.
Изобретение направлено также на использование устройства для придания подвижности телу по изобретению, в соответствии с которым амплитуда и различные колебательные движения, прикладываемые к платформе, регулируются по определенным программам, выполненным с возможностью включать в себя режим случайных колебаний.
Альтернативно, колебательные движения платформы осуществляются в режиме реального времени по команде джойстика, управляемого человеком, обеспечивающим контроль упомянутого придания подвижности телу, и, в частности, врачом-специалистом. В этом случае ответ платформы является немедленным и прямым и точно следует действию врача-специалиста посредством команд, подаваемых с помощью джойстика.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
фиг.1 и 2 схематично изображают в изометрии виды по двум различным направлениям принципа работы устройства для придания подвижности телу по изобретению.
Фиг.3 схематично изображает в изометрии в разобранном виде вариант осуществления по изобретению.
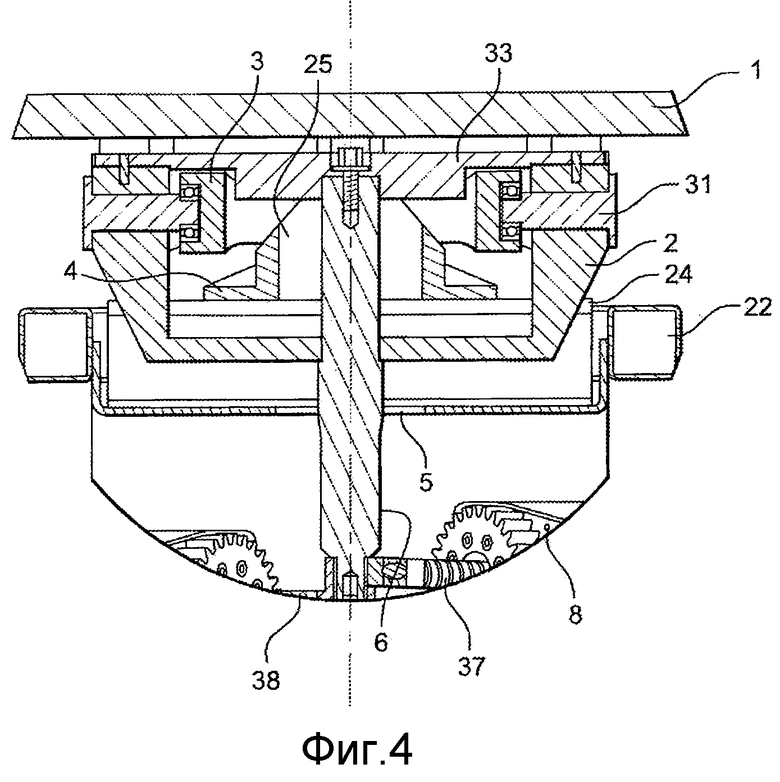
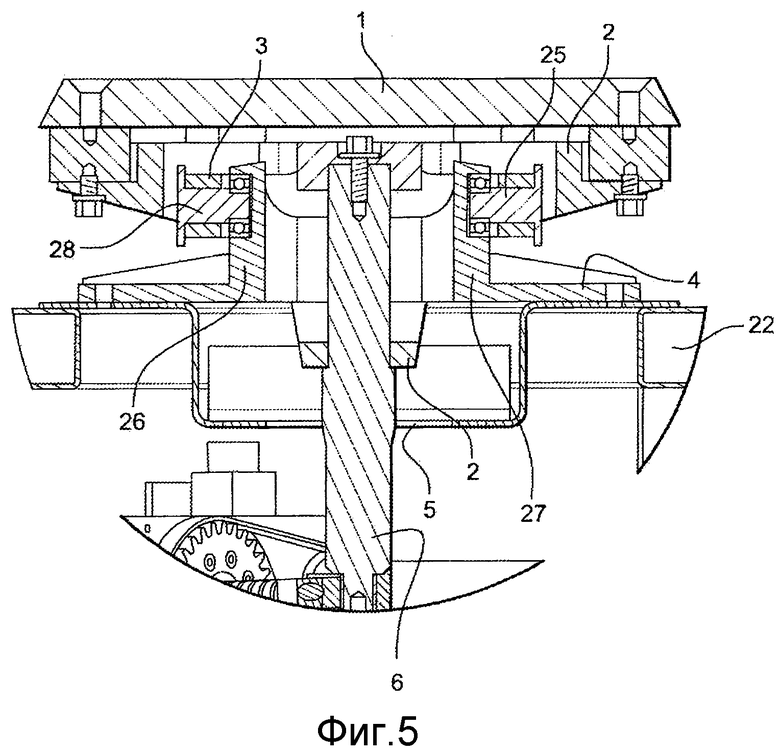
Фиг.4 и 5 схематично изображают два вида в сагиттальном сечении устройства по изобретению в двух перпендикулярных одна относительно другой плоскостях.
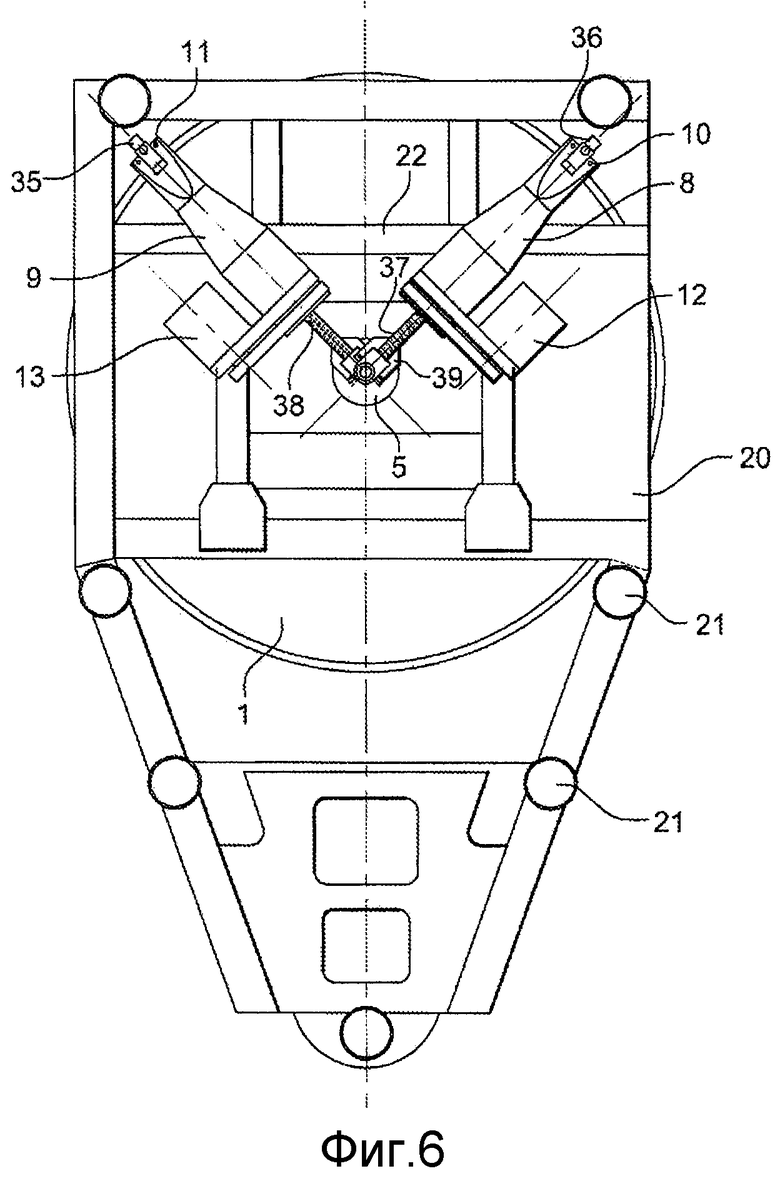
Фиг.6 схематично изображает устройство по изобретению на виде снизу.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
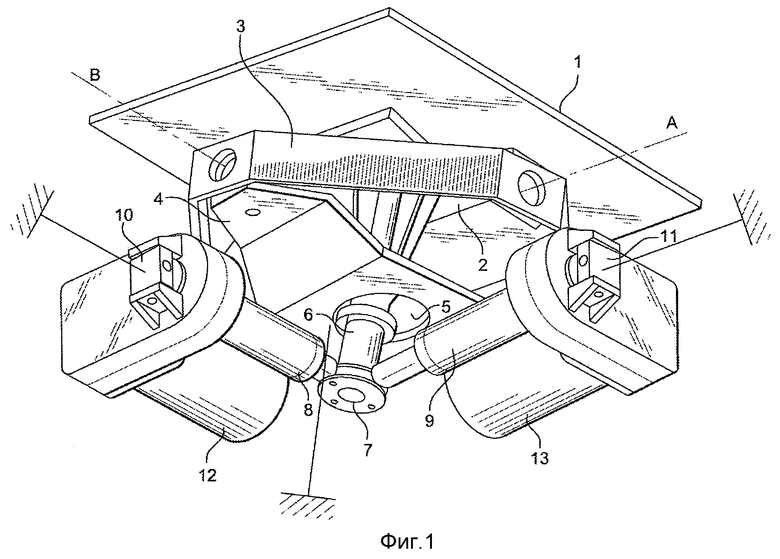
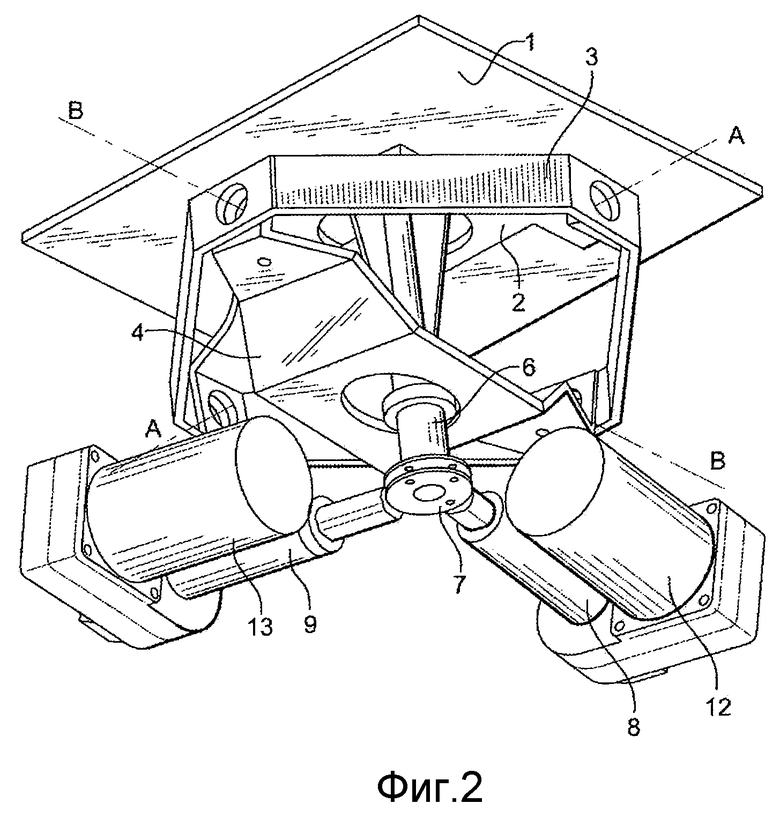
На фиг.1 и 2 изображен вид в изометрии, схематично иллюстрирующий принцип работы устройства по изобретению.
По существу, устройство содержит платформу 1, схематично представленную квадратной формой, но которая может иметь любую другую форму, в частности, круглую или овальную.
Платформа 1 шарнирно установлена с помощью жесткой арматуры 2 на верхней жесткой раме 3 по горизонтальной шарнирной оси А-А, пунктирно показанной на фиг.1. Другими словами, связь платформы 1 с верхней рамой является шарнирным соединением, при этом упомянутая платформа 1 установлена с возможностью поворота относительно упомянутой оси А-А.
Следовательно, верхняя рама 3 сама шарнирно установлена на жесткой арматуре 4, соединенной с основанием устройства, по шарнирной оси В-В, показанной пунктирной линией, также горизонтальной и ориентированной перпендикулярно относительно оси А-А.
Другими словами, платформа 1 соединена с основанием двойным шарнирным соединением.
С учетом этого двойного шарнирного соединения платформа 1 способна иметь неопределенное количество направлений относительно ее исходной горизонтальной плоскости.
Для уточнения возможности обеспечения этого множества направлений и, следовательно, передачи человеку, вставшему на упомянутую платформу, бесконечного множества колебательных движений для принудительного изменения его равновесия и обеспечения необходимых различных движений для придания подвижности упомянутая платформа 1 продолжается вниз валом 6, по существу, жестко соединенным с центром платформы любыми подходящими средствами, например, болтами или тому подобным. Таким образом, в описанном примере вал 6 ориентирован перпендикулярно плоскости платформы 1.
Свободный конец этого вала 6, то есть противолежащий платформе 1, соединен шарнирным соединением с двумя приводами 8 и 9, в данном случае образованными электрическими силовыми цилиндрами.
Упомянутые приводы сами соединены со станиной с помощью шарнирного соединения, соответственно 10 и 11, и в данном случае снабжены карданами, обеспечивающими упомянутым приводам определенные отклонения в горизонтальной плоскости.
В частности, эти приводы 8 и 9 образованы каждый шариковым винтом, способным поворачиваться в двух направлениях с помощью бесщеточного двигателя, соответственно 12 и 13, снабженного кодирующим устройством, или же, при необходимости, редуктором. Свободный конец каждого из винтов соединен с нижним свободным концом 7 вала 6 с помощью кардана для обеспечения углового перемещения конца винта относительно свободного конца 7 вала 6. Два привода 8 и 9 направлены перпендикулярно один другому, когда платформа находится в положении покоя, то есть плоско или горизонтально.
Отсюда понятно, что, воздействуя, с одной стороны, на соответствующие скорости вращения бесщеточных двигателей 12, 13, и, с другой стороны, на направления вращения винтов, можно придать валу 6 и, соответственно, платформе 1, которая с ним непосредственно связана, любой возможный тип направления. Отклонение вала 6, однако, ограничено конструкцией и в данном случае окном 5, выполненным в жесткой арматуре 4.
Поставленной целью не является обеспечение сильного наклона платформы, но придание последней неограниченного и неопределенного количества направлений и, таким образом, увеличение количества возможных колебаний относительно ее центральной оси 6.
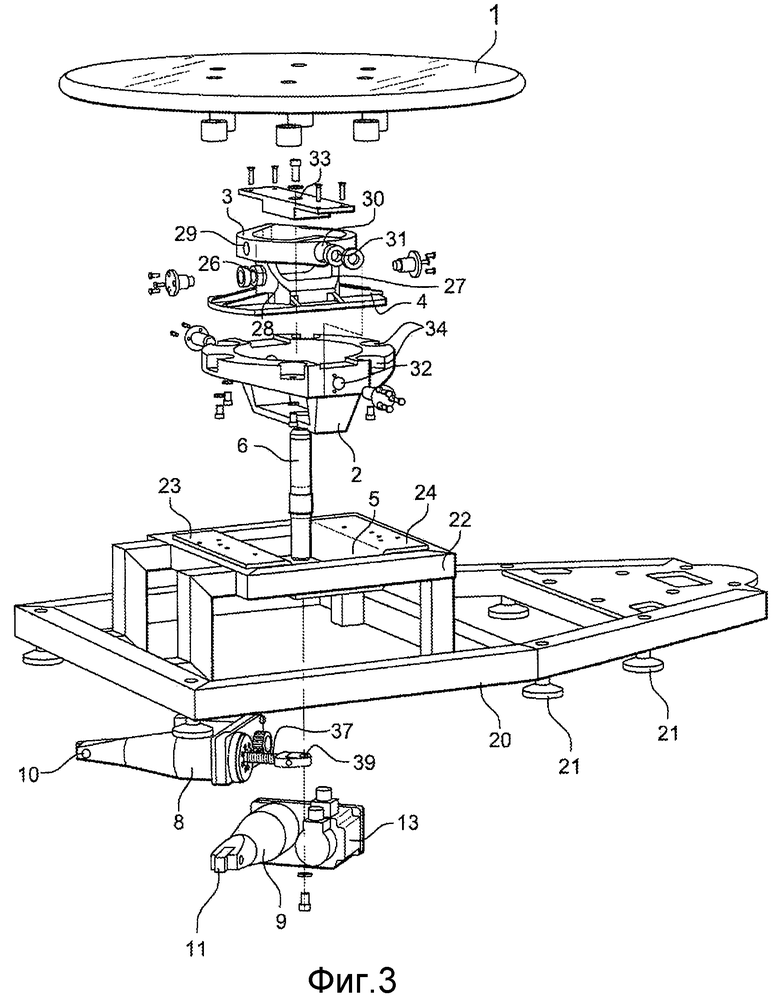
На фиг.3-6 представлены различные варианты осуществления устройства по изобретению.
Таким образом, устройство образовано станиной 20, размещенной на полу на ножках 21, в данном случае на шести, предпочтительно снабженных нескользящим покрытием.
Станина 20 содержит сверху основание 22, которое жестко с ней соединено, например, сваркой.
Верхняя станина 22 снабжена двумя пластинами 23, 24 для крепления жесткой арматуры 4. Эти две пластины разнесены одна от другой и вместе с верхней станиной 22 образуют окно 5 для ограничения отклонения вала 6.
Жесткая арматура 4 снабжена в центре сквозным отверстием 25, предназначенным для прохода вала 6. Она закреплена болтами на упомянутых пластинах 23, 24. Кроме того, она снабжена расположенными одна напротив другой вертикальными консолями 26, 27, каждая из внешних поверхностей которых принимает шарнирный штифт 28, предназначенные для взаимодействия со сквозными отверстиями 29, выполненными по периферии верхней рамы 3.
Упомянутая верхняя рама 3 также выполнена полой в центре для обеспечения прохода вала 6. Кроме того, она содержит два других сквозных отверстия 30, также расположенных одно напротив другого, но ось, которая их соединяет и соответствует оси А-А по фиг.1 и 2, ориентирована на 90º относительно оси, связывающей сквозные отверстия 29, и соответствует оси В-В упомянутых фигур 1 и 2.
В отверстия 30, в свою очередь, вставлены шарнирные штифты 31, предназначенные для взаимодействия со сквозными отверстиями 32, выполненными по периферии жесткой арматуры 2. Она имеет верхнюю поверхность, к которой привинчена пластина 33, жестко соединенная с плитой, образующей платформу 1, при этом на уровне пластины привинчиванием закреплен верхний конец вала 6. Плита присоединена болтами к верхней поверхности жесткой арматуры 2, которая имеет пазы 34 для приема болтов или гаек.
На фиг.6 изображено размещение приводов 8 и 9. Они расположены внизу относительно комплекса устройства и размещаются в объеме, определяемом станиной 20, под верхним основанием 22. Упомянутые приводы соединены соответственно под углом к станине 20 с помощью шарнирного соединения 10, 11, ось которого проходит через лапку крепления 35, 39, соединенную со станиной.
Концы шариковых винтов 37, 38, являющиеся основными составными частями этих приводов, закреплены на нижнем конце вала 6 с помощью кардана 39, 40.
Понятно, что вследствие бесконечного множества возможных качательных движений платформы можно добиться значительной подвижности позвоночной оси. Обеспечивая это, устройство по изобретению особенно применимо при часто встречающихся патологиях упомянутой позвоночной оси.
Кроме того, это устройство можно использовать для других применений, среди которых можно назвать следующие, не ограничивающие изобретение:
- восстановление формы;
- телесное равновесие;
- похудание;
- реабилитация, в частности, плеча, колена, бедра, позвоночного столба;
- тренировка спортсменов, в частности высокого уровня.
В зависимости от выявленной патологии и в зависимости от намеченного применения могут быть реализованы различные программы скорости колебаний и углов колебаний с помощью программируемого автоматического устройства, воздействующего непосредственно на бесщеточные двигатели двух приводов.
В заключение, можно также представить придание платформе специфических движений, например, с помощью джойстика, непосредственно приводимого в действие врачом, наблюдаемого за больным, при этом движения джойстика соответствуют движениям, передаваемым платформе. Таким образом, можно очень точно адаптировать лечение в зависимости от выявленной патологии. Кроме того, вполне возможно сохранить специфическую траекторию, связанную с патологией конкретного человека, и автоматически ее использовать в режиме самообслуживания.
Устройство, кроме того, снабжено рукоятками (не изображенными на чертеже), расположенными, по существу, на высоте туловища стандартного пользователя для обеспечения возможности последнему держаться без риска падения, учитывая передаваемые платформе колебательные движения, на которой он находится в стоячем положении. Эти рукоятки, кроме того, могут осуществлять особые движения для оптимизации реабилитационного действия или желаемых упражнений для развития мускулатуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАВНОВЕСИЯ ЧЕЛОВЕЧЕСКОГО ТЕЛА | 1998 |
|
RU2203119C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПЕВТИЧЕСКОГО ОЗДОРОВЛЕНИЯ ЧЕЛОВЕКА | 2012 |
|
RU2519975C1 |
| УСТРОЙСТВО ДЛЯ ПРИДАНИЯ ОБЩЕЙ ПОДВИЖНОСТИ ТЕЛУ | 2007 |
|
RU2414944C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| МЕХАНУРГИЧЕСКИЙ СТОЛ ДЛЯ МАССАЖА И МАНУАЛЬНОЙ ТЕРАПИИ | 2009 |
|
RU2391084C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВЕРТЕБРАЛЬНЫЙ ТРЕНАЖЕР | 2001 |
|
RU2181275C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КИРПИЧА | 2001 |
|
RU2193967C1 |
| Роботизированное кресло-тренажер | 2024 |
|
RU2837297C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
Изобретение относится к медицине. Устройство для придания подвижности человеческому телу содержит приемную платформу, которая подвижна относительно неподвижного основания и предназначена для удержания тренируемого человека в стоячем положении. Платформа соединена с основанием двойным шарнирным соединением. Платформу приводят в колебательное движение относительно оси, которая проходит, по существу, через центр, с помощью двух приводов. Каждый из приводов соединен шарнирным соединением с валом и с основанием. Вал жестко соединен с платформой. Технический результат - возможность осуществлять дискретные качания и придавать колебанию случайный характер, который способствует реабилитации и тренировкам. 3 н. и 5 з.п. ф-лы, 6 ил.
1. Устройство для придания подвижности телу, содержащее приемную платформу (1), подвижную относительно неподвижного основания (20, 22), предназначенную для удержания тренируемого человека в стоячем положении, отличающееся тем, что платформа (1) соединена с основанием двойным шарнирным соединением, а также тем, что она приводится в колебательное движение относительно оси, проходящей, по существу, через ее центр, с помощью приводов (8, 9), каждый из которых соединен шарнирным соединением с одним валом (6), жестко соединенным с упомянутой платформой, при этом упомянутые приводы (8, 9) шарнирно соединены с основанием.
2. Устройство по п.1, отличающееся тем, что платформа (1) шарнирно установлена на раме или жесткой верхней арматуре (3), задающей первую, по существу, горизонтальную шарнирную ось (А-А), при этом упомянутая верхняя рама (3) сама шарнирно установлена на жесткой арматуре (4) по второй, по существу, горизонтальной шарнирной оси (В-В), перпендикулярной первой шарнирной оси, при этом упомянутая жесткая арматура соединена с основанием (20, 22).
3. Устройство по п.2, отличающееся тем, что платформа (1) снабжена осью или центральным валом (6), расположенным перпендикулярно относительно ее плоскости, а также тем, что приводы (8, 9), в количестве двух, соединены со свободным концом упомянутого вала с помощью кардана (39, 40), при этом направления работы упомянутых приводов, по существу, перпендикулярны одно другому.
4. Устройство по одному из пп.1-3, отличающееся тем, что каждый из приводов (8, 9) образован силовым цилиндром, в частности электрическим, точка крепления которого к основанию образована шарнирным соединением (10, 11) типа кардана.
5. Устройство по п.4, отличающееся тем, что каждый из приводов образован шариковым винтом (37, 38), выполненным с возможностью вращения в двух направлениях посредством бесщеточного двигателя (12, 13), снабженного кодирующим устройством, или же редуктором.
6. Устройство по одному из пп.1-3, 5, отличающееся тем, что оно содержит, кроме того, рукоятки и, в общем, любое средство для удержания, предоставляющее человеку, который подвергается лечению или тренировке, возможность держаться посредством верхних конечностей, учитывая нарушения равновесия, которым он подвергается вследствие колебаний платформы, на которой он находится.
7. Использование устройства по одному из пп.1-6, за исключением способов терапевтического лечения человеческого тела, отличающееся тем, что амплитуда и различные колебательные движения, переданные платформе (1), регулируются по определенным программам, выполненным с возможностью включать в себя режим случайных колебаний.
8. Использование устройства по одному из пп.1-6, за исключением способов терапевтического лечения человеческого тела, отличающееся тем, что амплитуда и различные колебательные движения, переданные платформе (1) в режиме реального времени, осуществляются по команде джойстика, которым манипулирует человек, обеспечивающий контроль упомянутого придания подвижности телу, и в частности, практикующий врач.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2094627C1 |
| СПОСОБ ЛЕЧЕНИЯ НЕВРОЛОГИЧЕСКИХ ПРОЯВЛЕНИЙ ПОЯСНИЧНОГО ОСТЕОХОНДРОЗА | 1991 |
|
RU2026054C1 |
| СПОСОБ ГИДРОФОБИЗАЦИИ ШИФЕРА | 2002 |
|
RU2243191C2 |
| Устройство для разработки движений в суставах конечностей | 1985 |
|
SU1297855A1 |
| Устройство для разработки верхней конечности | 1982 |
|
SU1025427A1 |
| Устройство для реабилитации конечностей | 1980 |
|
SU938998A1 |
| ЕР 1491237 А1, 29.12.2004. | |||

