Изобретение относится к системам мониторинга состояния железнодорожного подвижного состава, в частности, грузовых вагонов.
Наличие информации о техническом состоянии железнодорожного грузового вагона, например, информации о ходе процесса загрузки-выгрузки железнодорожного грузового вагона, весе груза, размещенного в кузове железнодорожного грузового вагона, температуре буксового узла, информации о техническом состоянии колесных пар, о качестве поверхности катания колес, являются насущной необходимостью при эксплуатации железнодорожного грузового вагона.
Известно устройство для взвешивания грузового вагона «WEIGHING SYSTEM FOR WEIGHING RAILROAD CARS AND THEIR LOAD» по патенту US 6441324, G01G 19/08 от 28.07.2000 г.
Способ взвешивания, реализованный в данном устройстве, заключается в измерения упругой деформации измерительными датчиками, установленными на пятнике кузова, которым кузов опирается на надрессорную балку ходовой тележки. Система содержит измерительные датчики, связанные с информационными электронными блоками, которые производят получение, обработку и хранение данных от измерительных датчиков и их передачу по линиям связи на внешнее устройство отображения информации. При всех положительных качествах, присущих данной системе, сложно осуществимым является выявление распределения веса кузова грузового вагона по его продольным сторонам, по причине малых измерительных плечей, выполненных в виде радиуса пятника.
Также из уровня техники известна система мониторинга железнодорожного грузового вагона, способ и устройство которой реализованы по патенту US 2015219487 (A1) «RAILWAY FREIGHT CAR ON-BOARD WEIGHING SYSTEM», B61D 49/00, G01G 19/04 от 31 января 2014 г. Данная система содержит кузов железнодорожного грузового вагона, опирающийся на ходовые тележки, содержащие надрессорную балку, боковые рамы, множество датчиков, установленных непосредственно на надрессорной балке, боковых рамах, и предназначенных для измерения упругих деформаций надрессорной балки от действия веса кузова с грузом железнодорожного грузового вагона, при этом датчики связаны с информационными электронными блоками, которые производят получение, обработку и хранение полученных от измерительных датчиков данных, блок связи в виде приемо-передатчика для передачи данных на удаленный терминал, блок питания электроэнергией.
Основной технической проблемой, присущей данной системе, является малая чувствительность и низкая точность получаемой информации о весе перевозимого груза, обусловленная использованием нестабильной схемы передачи нагрузок на надрессорную балку и боковую раму, по причине нежесткости их взаимных связей, вызванных большими допусками на изготовление надрессорной балки и боковых рам, а также непостоянством и неопределенностью сил трения в системе рессорного подвешивания надрессорной балки. Кроме того, рассмотренные системы не позволяют определять распределение веса по осям колесных пар, колесам, определять наличие дефектов непосредственно по каждому из колес железнодорожного грузового вагона.
Техническим результатом заявляемого устройства является увеличение чувствительности и точности получаемой информации о весе перевозимого груза.
Наиболее предпочтительным местом размещения датчиков для определения веса являются менее жесткие и точно изготовленные элементы системы ходовых частей железнодорожного грузового вагона.
Одними из таких элементов являются оси колесных пар.
Ось колесной пары испытывает непосредственное воздействие от веса кузова железнодорожного грузового вагона и перевозимого в нем груза и обладает ярко выраженной способностью к упругой деформации от прилагаемых к ней через подшипники сил. Ось колесной пары своею шейкой непосредственно взаимодействует с таким важным узлом грузового вагона как подшипник, что делает возможным осуществлять контроль за состоянием такого важного узла грузового вагона как буксовый узел колесной пары, от состояния которой во многом зависит работоспособность грузового вагона.
Кроме того, использование в качестве источника информации о техническом состоянии грузового вагона точно выполненных, в части допусков на геометрию и свойств металла, и при этом однозначно сопряженных элементов, таких как подшипники и шейки оси колесной пары, позволяет увеличить достоверность получаемых данных измерений. В связи с тем, что нагрузка на шейку оси колесной пары в предлагаемой системе передается через подшипник, который, обладая малой силой трения, не вносит больших погрешностей в результаты измерений, появляется возможность через поведение и динамическое состояние шейки колесной пары производить контроль за состоянием колес, в частности, за состоянием поверхности катания колеса, дефектами рельсов, механическим и температурным состоянием подшипников, буксового узла, в том числе, подшипникового адаптера.
Целью данного изобретения является создание способа и устройства, позволяющих более точно определять величины технических параметров при эксплуатации грузового вагона, в частности, веса кузова грузового вагона, распределения веса по продольным сторонам кузова грузового вагона, усилия от веса кузова грузового вагона, приходящегося на каждую ходовую тележку, каждую колесную пару, на каждое колесо колесной пары, температуру буксового узла колесных пар, состояние поверхности катания колеса грузового вагона, температуру подшипников, скорость перемещения грузового вагона, скорость вращения каждой колесной пары с возможностью сравнения этих скоростей для определения проблемной колесной пары в части определения затрудненного вращения колесной пары по причинам дефектов поверхности катания, разрушения буксового узла, схода с рельса колесной пары.
Техническая сущность данного изобретения заключается в размещении измерительных датчиков непосредственно на оси колесной пары как детали, наиболее подверженной упругой деформации, линейно зависящей от веса кузова грузового вагона. Размещенные на оси колесной пары измерительные датчики устанавливают преимущественно в вертикальной плоскости, перпендикулярной продольной оси симметрии колесной пары, выступающей как поперечное измерительное сечение, которое может быть расположено в любой части оси колесной пары и в любых количествах. Такой способ и устройство позволяет осуществлять измерение упругих деформаций и по полученным данным производить вычисления и определять с высокой точностью суммарное воздействие веса кузова и размещенного в нем груза как на всю колесную пару, так и на каждое колесо колесной пары в отдельности.
Такая способность предлагаемой системы позволяет определять распределение веса по сторонам вагона, точно определять центр от вертикального и горизонтального приложения массы от груза и кузова, степень смещения центра масс от геометрического центра кузова, как следствие этого - допустимый перекос кузова от воздействия не отцентрированных масс груза. Кроме того, размещение измерительных датчиков на оси колесной пары в непосредственной близости от буксового узла и колес позволяет производить контроль за состоянием буксового узла, а именно за температурой и состоянием подшипника, за техническим состоянием колес, за степенью износа колес и подшипников, проводить мониторинг появления и развития дефектов и неисправностей колес, производить контроль за исправностью и качеством рельсового пути, в том числе каждой нити рельсового пути, а при прохождении кривых - за состоянием кривых участков рельсового пути.
Сущность изобретения реализована в предлагаемом способе и системе мониторинга железнодорожного грузового вагона.
Способ мониторинга железнодорожного грузового вагона включает в себя следующие действия:
- размещение на оси колесных пар измерительных датчиков,
- считывание измерительными датчиками величины отклонения контролируемого параметра железнодорожного грузового вагона,
- передачу данных от измерительных датчиков в информационный электронный блок с соответствующим программным обеспечением, который осуществляет сбор, обработку и хранение данных, полученных от измерительных датчиков,
- передачу результатов измерений параметров технического состояния железнодорожного грузового вагона на внешние блоки хранения и индикации информации о техническом состоянии железнодорожного грузового вагона.
Заявляемая система мониторинга железнодорожного грузового вагона представлена на чертежах, где:
на Фиг. 1 изображена колесная пара, оборудованная системой мониторинга железнодорожного грузового вагона, остальные узлы и детали железнодорожного вагона условно не показаны, измерительные датчики размещены на оси колесной пары;
на Фиг. 2 - то же самое, при этом измерительные датчики размещены на оси колесной пары в одном поперечном измерительном сечении, лежащем в вертикальной плоскости «А-А», перпендикулярной продольной оси симметрии «O1-О1» колесной пары;
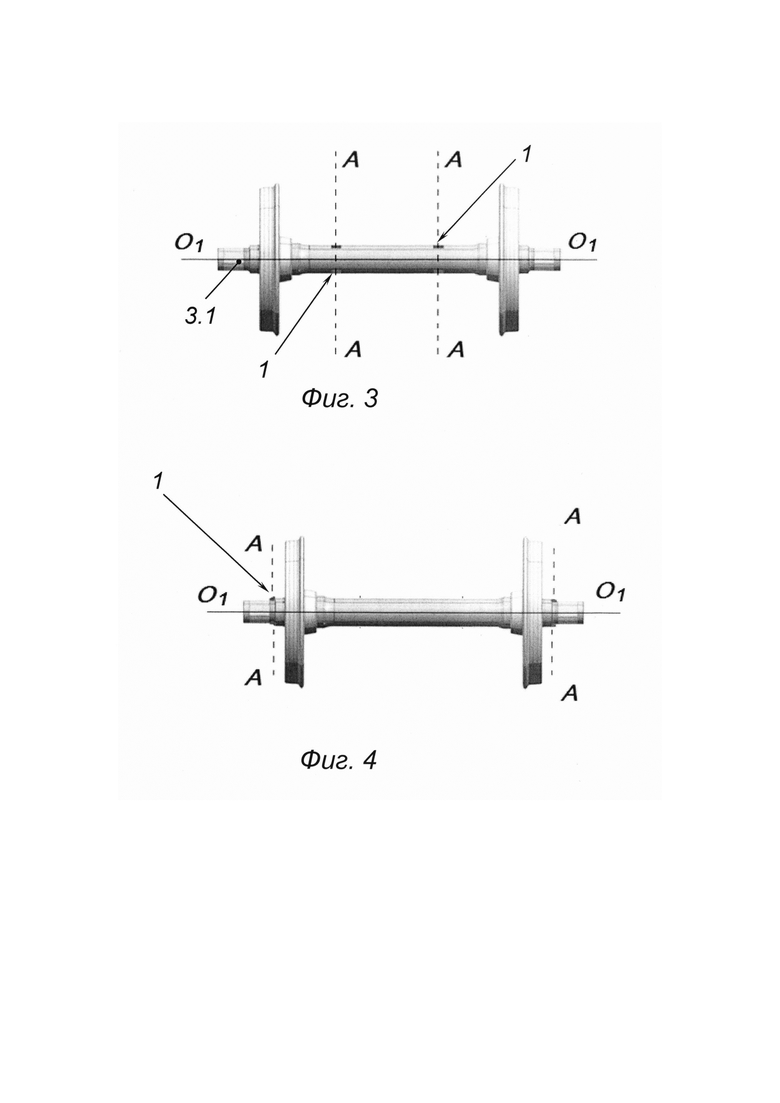
на Фиг. 3 - то же самое, при этом измерительные датчики размещены на оси колесной пары, при этом система содержит по меньшей мере два поперечных измерительных сечения, лежащих в вертикальных плоскостях «А-А», размещенных в средней части оси колесной пары;
на Фиг. 4 - то же самое, при этом измерительные датчики размещены на оси колесной пары, система содержит по меньшей мере два поперечных измерительных сечения, лежащих в вертикальных плоскостях «А-А», размещенных в зоне шейки оси колесной пары;
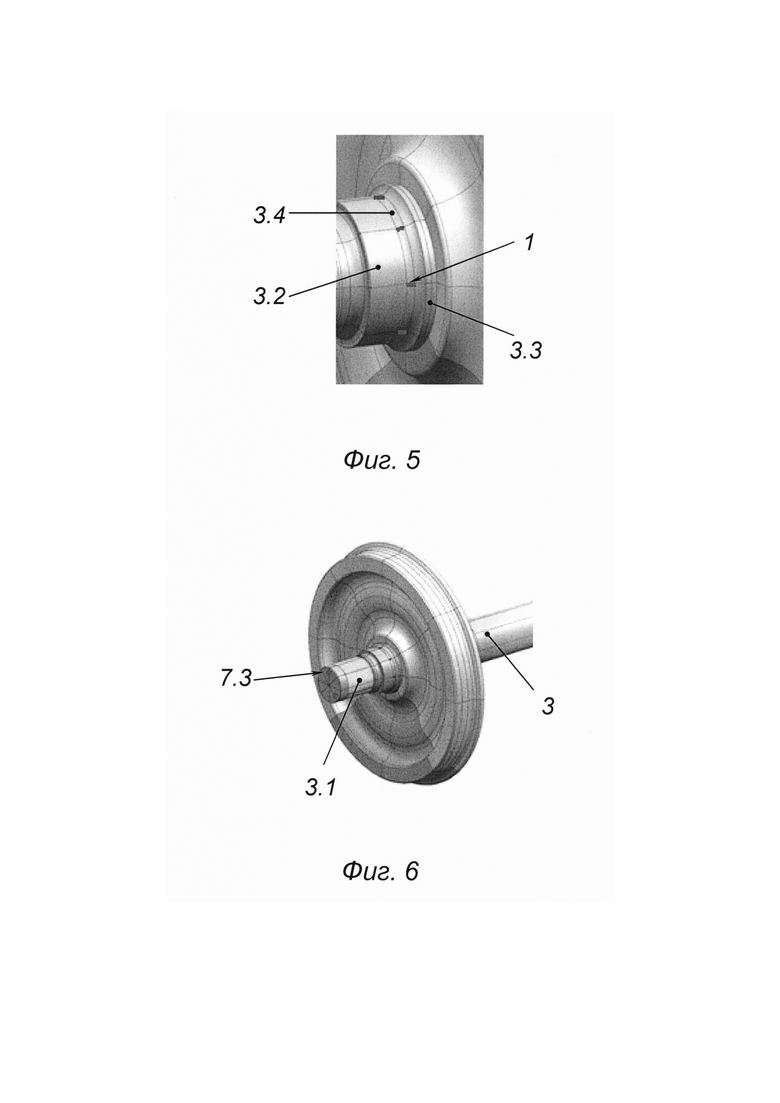
на Фиг. 5 - местный вид предподступичной части оси колесной пары, на котором в гантельной ее части установлены измерительные датчики;
на Фиг. 6 - вид одного из колес колесной пары;
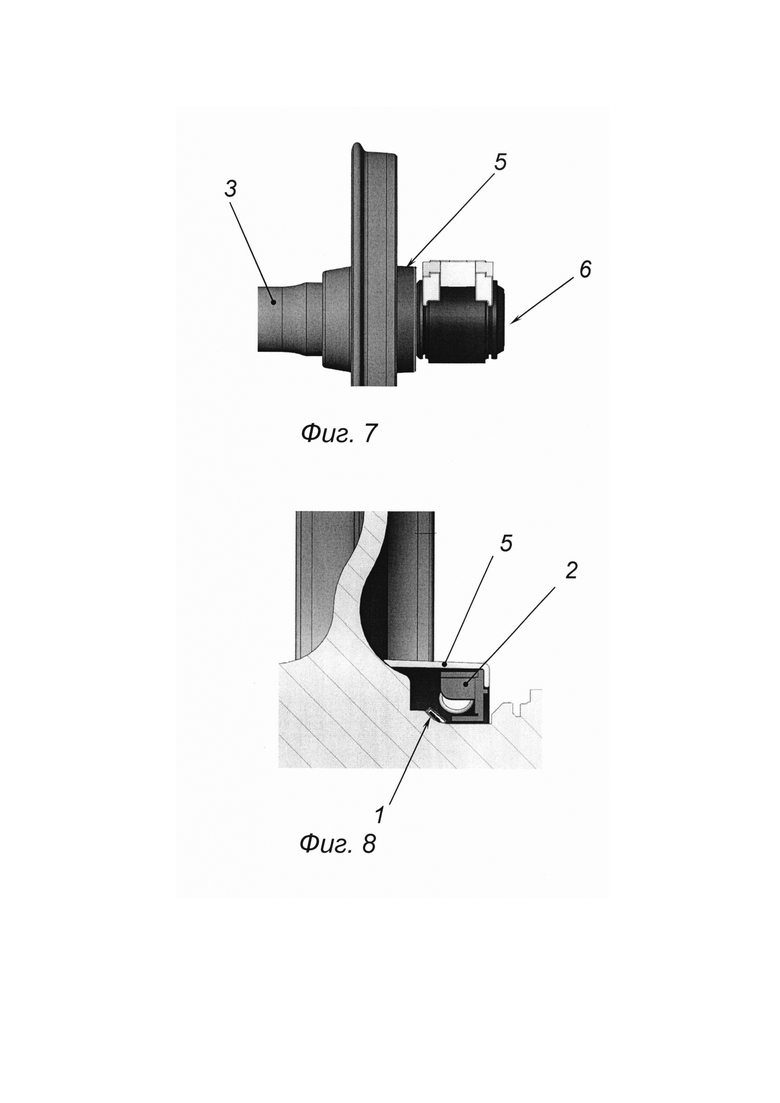
на Фиг. 7 - местный вид колесной пары с буксовым узлом и защитной крышкой;
на Фиг. 8 - поперечный разрез на Фиг. 7;
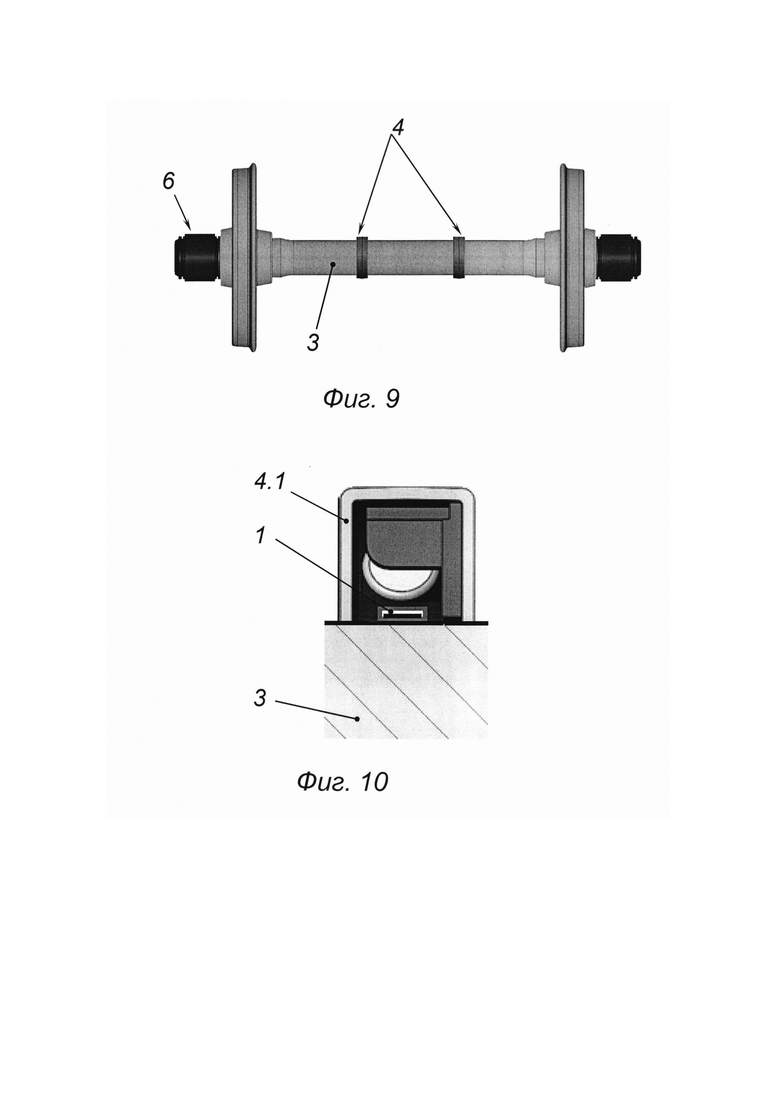
на Фиг. 9 - общий вид колесной пары с системой мониторинга железнодорожного грузового вагона, размещенной в средней части оси колесной пары и закрытой защитными кожухами;
на Фиг. 10 - поперечный разрез блоков системы мониторинга железнодорожного грузового вагона на Фиг. 9;
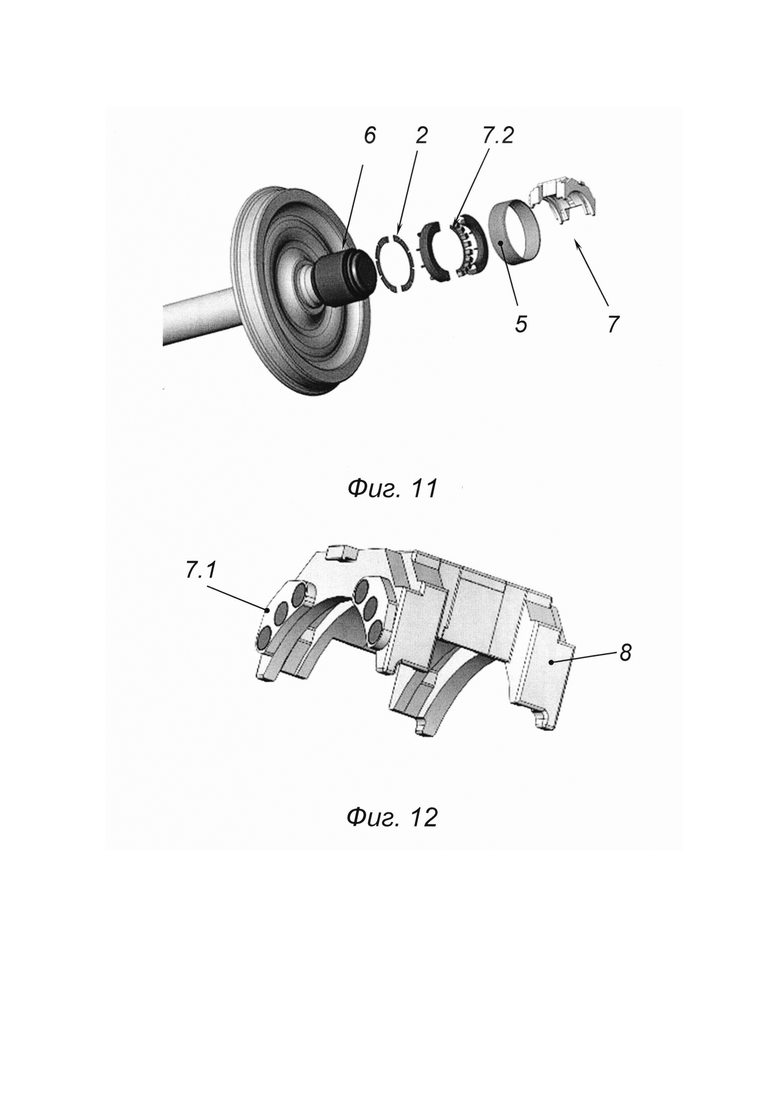
на Фиг. 11 - местный вид колесной пары с буксовым узлом и условно снятыми элементами системы мониторинга железнодорожного грузового вагона;
на Фиг. 12 - общий вид адаптера с размещенными элементами системы мониторинга железнодорожного грузового вагона;
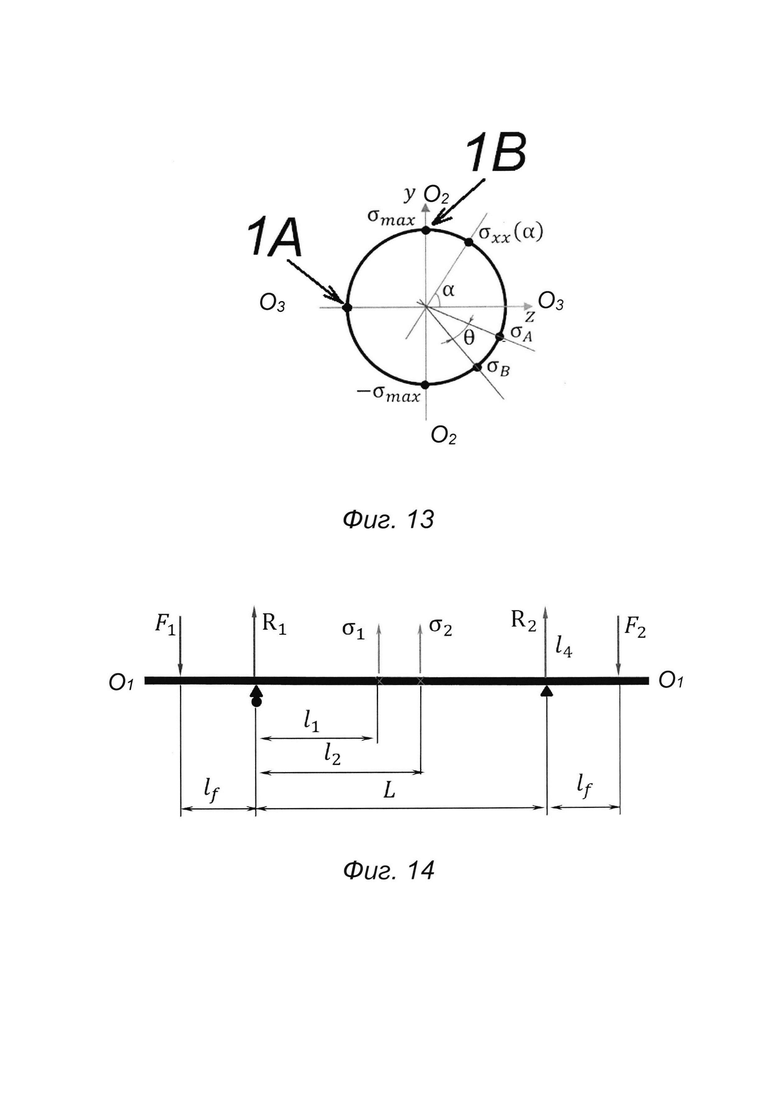
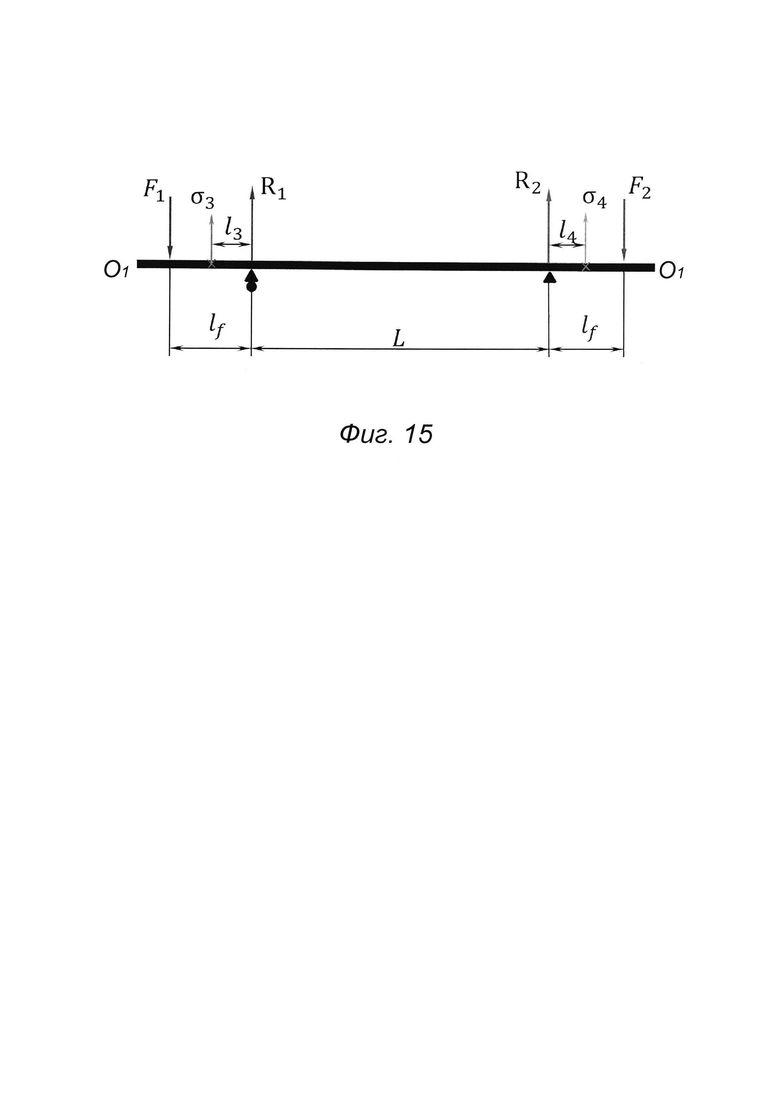
на Фиг. 13, 14, 15 - расчетные схемы с изображением сил и реакций, действующих на ось колесной пары.
Предлагается способ мониторинга железнодорожного грузового вагона, включающий следующие действия:
- размещение комплектов, по крайней мере из двух измерительных датчиков на оси, по меньшей мере одной из колесных пар, при этом рядом размещенные соседние измерительные датчики каждого комплекта размещают вне центральной продольной плоскости, проходящей через продольную ось «O1-О1» симметрии колесной пары, затем
- измеряют угол «θ» между проекциями ближайших соседних измерительных датчиков каждого из комплектов на вертикальную плоскость, перпендикулярную продольной оси симметрии «O1-О1» колесной пары каждого из комплектов;
- вносят значение углов «θ» каждого из комплектов в информационно электронный блок для использования этих значений в качестве постоянной для данного значения углов «θ» каждого из комплектов в алгоритмах математических вычислений при определении напряжений, возникающих в соответствующей оси колесной пары;
- фиксируют с помощью измерительных датчиков отклонения контролируемых параметров технического состояния железнодорожного грузового вагона, которые подают в информационные электронные блоки с соответствующим программным обеспечением, где производится обработка и хранение данных измерений.
Предлагается также способ мониторинга железнодорожного грузового вагона, включающий в себя следующие действия:
- размещение измерительных датчиков в средней части оси колесных пар, при этом рядом размещенные соседние измерительные датчики каждого комплекта размещают вне центральной продольной плоскости, проходящей через продольную ось «O1-О1» симметрии колесной пары;
- измеряют угол «θ» между проекциями ближайших соседних измерительных датчиков каждого из комплектов на вертикальную плоскость, перпендикулярную продольной оси симметрии «O1-О1» колесной пары каждого из комплектов;
- вносят значение углов «θ» каждого из комплектов в информационно электронный блок для использования этих значений в качестве постоянной для данного значения углов «θ» каждого из комплектов в алгоритмах математических вычислений при определении напряжений, возникающих в соответствующей оси колесной пары;
- фиксируют с помощью измерительных датчиков отклонения контролируемых параметров технического состояния железнодорожного грузового вагона, которые подают в информационные электронные блоки с соответствующим программным обеспечением, где производится обработка и хранение данных измерений.
В качестве варианта использования такого способа предусмотрено размещение комплекта измерительных датчиков в средней части оси колесных пар в одной вертикальной плоскости, перпендикулярной продольной оси симметрии «O1-О1» колесной пары, образующей одно поперечное измерительное сечение;
Также в качестве варианта использования предлагаемого способа предусмотрено размещение измерительных датчиков в средней части оси колесных пар по крайней мере в двух вертикальных плоскостях, перпендикулярных продольной оси симметрии «O1-О1» колесной пары, образующих, по крайней мере два поперечных измерительных сечения; при этом измерительные датчики в каждом из измерительных сечений не размещены в одной плоскости, проходящей через продольную ось симметрии «O1-О1» колесной пары.
Размещении измерительных датчиков непосредственно на оси колесной пары, создание с помощью измерительных датчиков измерительных сечений в различных частях оси колесной пары, используя минимальное значение измерительных датчиков, например, двух при определении веса железнодорожного грузового вагона, не размещенных в одной плоскости, проходящей через продольную ось симметрии «O1-О1» колесной пары, позволяет осуществлять измерение упругих деформаций и по полученным данным производить вычисления и определить с высокой точностью как суммарное воздействие на всю колесную пару, так и на каждое колесо колесной пары в отдельности от действия веса кузова и размещенного в нем груза.
В качестве еще одного способа мониторинга железнодорожного грузового вагона предлагается способ, включающий следующие действия:
- размещают комплекты, по крайней мере из двух измерительных датчиков по меньшей мере в одной консольной части оси колесной пары, при этом рядом размещенные соседние измерительные датчики каждого комплекта размещают вне центральной продольной плоскости, проходящей через продольную ось «O1-О1» симметрии колесной пары;
- измеряют угол «θ» между проекциями ближайших соседних измерительных датчиков каждого из комплектов на вертикальную плоскость, перпендикулярную продольной оси симметрии «O1-О1» колесной пары каждого из комплектов;
- вносят значение углов «θ» каждого из комплектов в информационно электронный блок для использования этих значений в качестве постоянной для данного значения углов «θ» каждого из комплектов в алгоритмах математических вычислений при определении напряжений, возникающих в соответствующей оси колесной пары;
- фиксируют с помощью измерительных датчиков отклонения контролируемых параметров технического состояния железнодорожного грузового вагона, которые подают в информационные электронные блоки с соответствующим программным обеспечением, где производится обработка и хранение данных измерений.
В качестве развития указанного выше способа предлагается мониторинг железнодорожного грузового вагона, при котором измерительные датчики размещают в консольной части оси колесной пары, а именно в галтельной ее части.
В качестве еще одного способа мониторинга железнодорожного грузового вагона предлагается способ, включающий следующие действия: размещение на торце консольной части оси колесной пары измерительных датчиков, считывание измерительными датчиками величины отклонения контролируемого параметра железнодорожного грузового вагона, передачу данных от измерительных датчиков в информационный электронный блок с соответствующим программным обеспечением, который осуществляет сбор, обработку и хранение данных, полученных от измерительных датчиков, передачу результатов измерений параметров технического состояния железнодорожного грузового вагона по каналам связи на внешние блоки хранения и индикации информации о техническом состоянии железнодорожного грузового вагона.
Предлагаемые способы мониторинга железнодорожного грузового вагона реализованы с помощью системы мониторинга железнодорожного вагона.
Предлагаемая система мониторинга содержит измерительные датчики 1 (Фиг. 1, 2, 3, 4), связанные линиями внутренней связи (не показаны) с информационными электронными блоками 2 (Фиг. 8). Информационные электронные блоки 2 предназначены для сбора, обработки и хранения данных, полученных от измерительных датчиков 1. Обработанные информационными электронными блоками 2 результаты измерений по линиям внешней связи (Wi-Fi, GSM) передаются к внешним блокам индикации блокам управления системой мониторинга (не показаны). С целью получения достоверной информации о контролируемых параметрах грузового вагона, например, таких как вес кузова вагона, ускорение вагона, ускорения, удары колесной пары, измерительные датчики 1 размещают на оси 3 колесной пары (Фиг. 3). При этом на оси 3 колесной пары размещают по меньшей мере два измерительных датчика 1 (Фиг. 1). Величина упругого воздействия на ось 3 колесной пары в этом случае определяется по показаниям измерительных датчиков 1 с корректировкой данных информационными электронными блоками 2 с учетом особенностей местоположения измерительных датчиков 1 относительно их взаимного положения и положения относительно конструкторских элементов оси 3 колесной пары. Главным условием получения более точной информации от работы предлагаемого варианта системы является условие, при котором рядом размещенные непосредственно друг с другом ближайшие соседние датчики не лежат в одной центральной общей продольной плоскости, проходящей через продольную ось симметрии «O1-О1» колесной пары, то есть измерительные датчики 1 размещены вне центральной продольной плоскости, проходящей через продольную ось симметрии «O1-О1» колесной пары. Угол между плоскостями, в которых расположены два измерительные датчика 1, в этом случае не должен быть равен 180° (Фиг. 13). Данное условие размещения измерительных датчиков 1 обусловлено тем, что центральная продольная плоскость «O3-О3» (ось 0 - Z), представляет собой для измерительных датчиков 1А «мертвую зону». При попадании одного из измерительных датчиков 1А, по меньшей мере, из пары измерительных датчиков, в указанную плоскость «O3-О3» (ось 0 - Z) такой измерительный датчик 1А не воспринимает растягивающего/сжимающего усилия оси 3 колесной пары, что не фиксируется чувствительным элементом измерительного датчика 1А, вследствие чего точность измерения будет наименьшей. При размещении измерительного датчика 1В в поперечном измерительном сечении, которое расположено в поперечной плоскости, проходящей через вертикальную поперечную ось симметрии «O2-О2» (ось 0 - Y), такой измерительный датчик 1В воспринимает истинную упругую деформацию оси 3 колесной пары в указанной плоскости «O2-О2» (ось 0 - Y), и измерение происходит с наибольшей точностью. При увеличении количества измерительных датчиков 1 точность измерения возрастает.
В качестве измерительных датчиков 1 могут быть использованы тензорезисторы, преобразующие величину упругой деформации оси 3 колесной пары в электрический сигнал. Также в качестве измерительных датчиков 1 могут быть использованы датчики ускорения (акселерометры), используемые для контроля за состоянием колесной пары или железнодорожного грузового вагона; в качестве блока питания для этого варианта системы может быть использован аккумулятор, генератор электрического тока или их совместное применение.
В качестве другого независимого технического решения предлагается система мониторинга железнодорожного грузового вагона, содержащая измерительные датчики 1, связанные линиями внутренней связи (не показаны) с информационными электронными блоками 2. Информационные электронные блоки 2 предназначенные для сбора, обработки и хранения данных, линии внешней связи для передачи данных от информационных электронных блоков 2 к внешним блокам индикации информации и управления системой мониторинга, блоки питания. Усовершенствование для данного технического решения заключается в том, что измерительные датчики 1 размещенные на оси 3 колесной пары, размещены в одной вертикальной плоскости «А-А» (Фиг. 2), образующей одно поперечное измерительное вертикальное сечение, перпендикулярное продольной оси симметрии «O1-О1» колесной пары, при этом рядом размещенные непосредственно друг с другом ближайшие соседние датчики также не лежат в одной центральной общей продольной плоскости, проходящей через продольную ось симметрии «O1-О1» колесной пары. Размещение измерительных датчиков 1 в одной вертикальной плоскости «А-А», перпендикулярной продольной оси симметрии «O1-О1» колесной пары, устраняет погрешности, возникающие в случае размещении измерительных датчиков 1 в несовпадающих между собой вертикальных плоскостях, как изложено в вышеописанном варианте. При этом не требуется корректировка результатов измерений, обусловленная разнесением измерительных датчиков 1 по разным вертикальным плоскостям. На разных по жесткости элементах оси колесной пары в качестве измерительных датчиков 1 использованы тензорезисторы, преобразующие величину упругой деформации оси колесной пары в электрический сигнал. В качестве измерительных датчиков 1 могут быть использованы датчики ускорения (акселерометры), используемые для контроля за состоянием колесной пары, в качестве блока питания может быть использован аккумулятор, генератор электрического тока или их совместное применение.
В качестве еще одного технического решения предлагается система мониторинга железнодорожного грузового вагона, содержащая измерительные датчики 1, связанные линиями внутренней связи (не показаны) с информационными электронными блоками 2, предназначенными для сбора, обработки и хранения данных, линии внешней связи для передачи данных от информационных электронных блоков 2 к внешним блокам индикации информации и управления системой мониторинга, блоки питания. Измерительные датчики 1 в этом варианте, кроме того, что размещены в средней части оси 3 колесной пары, размещены, по крайней мере, в двух вертикальных плоскостях (Фиг. 3), образующих соответствующие поперечные вертикальные измерительные сечения, перпендикулярные продольной оси симметрии «O1-О1» колесной пары, при этом в каждом из поперечных вертикальных измерительных сечений размещен комплект из, по крайней мере двух измерительных датчиков 1, причем рядом размещенные непосредственно друг с другом ближайшие соседние датчики 1 не лежат в одной центральной общей продольной плоскости, проходящей через продольную ось симметрии «O1-О1» колесной пары.
В качестве развития данной системы в качестве измерительных датчиков 1 могут быть использованы тензорезисторы, преобразующие величину упругой деформации оси 3 колесной пары в электрический сигнал, датчики ускорения, используемые для контроля за состоянием колесной пары, в качестве блока питания может быть использован аккумулятор.
Также предлагается система мониторинга железнодорожного грузового вагона, содержащего кузов, установленный на ходовые тележки с колесными парами, система включает в себя измерительные датчики 1, связанные линиями внутренней связи с информационными электронными блоками 2. Информационные электронные блоки 2 предназначены для сбора, обработки и хранения данных, полученных от измерительных датчиков 1. Обработанные информационными электронными блоками 2 результаты измерений по линиям внешней связи (Wi-Fi, GSM) передаются к внешним блокам хранения, индикации информации и управления системой мониторинга (не показаны). Измерительные датчики 1 размещены на оси 3 колесной пары, при этом система содержит по меньшей мере два измерительных датчика 1, размещенные непосредственно друг с другом ближайшие соседние датчики не лежат в одной центральной общей продольной плоскости, проходящей через продольную ось симметрии «O1-О1» колесной пары, при этом система содержит по меньшей мере два поперечных измерительных сечения, каждый из которых размещен в консольной части 3.1 оси 3 колесной пары (Фиг. 4).
В качестве развития данного варианта системы мониторинга предлагается система, в которой, усовершенствование заключается в том, что каждое поперечное измерительное сечение консольной части 3.1 оси 3 колесной пары находится между предподступичной 3.2 и подступичной 3.3 участками (Фиг. 5) оси 3 колесной пары, при этом измерительные датчики 1 установлены на галтели 3.4 - плавном переходе между указанными участками 3.2 и 3.3, как в месте концентрации наибольшей упругой деформации в оси 3 колесной пары.
В качестве развития данного варианта системы мониторинга предлагается система, в которой усовершенствование заключается в том, что информационные электронные блоки 2, блок связи, блок питания могут быть размещены на монтажной плате, выполненной в виде двух полуколец 2.1, установленных на оси 3 колесной пары и закрытых защитным кожухом 4, также выполненным из двух соединенных между собой защитных полуколец 4.1, охватывающих ось 3 колесной пары в ее средней части (Фиг. 9, 10).
Кроме этого, защитный кожух 4 может быть дополнительно закрыт предохранительным кольцом 5. В качестве измерительных датчиков 1 могут быть использованы тензорезисторы, преобразующие величину упругой деформации оси 3 колесной пары в электрический сигнал. В качестве измерительных датчиков 1 также могут быть использованы датчики ускорения (акселерометры), используемые для контроля за состоянием колесной пары; в качестве измерительных датчиков 1 могут быть использованы датчики температуры для контроля буксового узла 6 колесной пары; или в качестве измерительных датчиков 1 могут быть использованы датчик числа оборотов колесной пары, используемые для определения скорости движения железнодорожного грузового вагона; в качестве блока питания может быть использован аккумулятор, или в качестве блока питания может быть использован генератор электрического тока 7; при этом одна часть генератора электрического тока 7.1 (Фиг. 11) размещена на неподвижной части - адаптере 8, вторая подвижная часть 7.2 смонтирована на подвижной части, закрепленной на оси 3 колесной пары; либо одна часть генератора электрического тока может быть размещена на неподвижной части - буксового узла, вторая часть 7.3 на торце оси 3 колесной пары (Фиг. 6).
Предлагаемая система мониторинга железнодорожного грузового вагона обеспечивает заявленный технический результат, который заключается в увеличении чувствительности и точности получаемой информации о весе перевозимого груза, следующим образом.
Для определения реакций R1 R2 и силы F1 F2 (Фиг. 3, 14) достаточно определить продольные максимальные напряжения σ1, σ2 в двух измерительных поперечных сечениях в вертикальных плоскостях «А-А», которые определяют по формулам:
где:
F1, F2 - силы, действующие на ось, Н;
σ1, σ2 - напряжения, Па;
l1, l2, lf - плечи приложения сил, м;
Wz - момент сопротивления, м3
Напряжения σ1, σ2 определяют на основе измеренных упругих деформаций ε1, ε2, с помощью формулы:
σi=Е εi,
где: Е - модуль Юнга материала, на котором установлен датчик, Н/м2 (кгс/мм2).
Аналогично определяют реакции R1 R2 и силы Fl F2 (Фиг. 4, 15) при размещении измерительных датчиков 1 на консольных частях оси 3 колесной пар:

Напряжение σхх по поверхности оси 3 колесной пары (Фиг. 13) определяют по формулам
σхх (α)=σmax⋅sin(α),
где:
σхх(α) - напряжение для произвольного угла α, Па;
σmax - наибольшее напряжение, Па.
где:
σmax - наибольшее напряжение, Па;
σA - напряжение в точке А на поверхности оси 3 колесной пары, Па;
σВ - напряжение в точке В на поверхности оси 3 колесной пары, Па;
θ - угол между точками А и В, град.
Для определения нагрузки на ось 3 колесной пары достаточно измерений в двух измерительных поперечных сечениях в вертикальных плоскостях «А-А» в средней части оси 3 колесной пары, либо в консольных частях 3.1 оси 3 колесной пары. Указанные расчеты осуществляет информационные электронные блоки 2 по приведенным выше алгоритмам математических вычислений.
Таким образом достигается увеличении чувствительности и точности получаемой информации о весе перевозимого груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ПОЕЗДА | 2006 |
|
RU2457131C2 |
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2800560C1 |
| Устройство мониторинга и диагностики грузового вагона | 2020 |
|
RU2745168C1 |
| УСТРОЙСТВО МОНИТОРИНГА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2016 |
|
RU2627959C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| ТЕЛЕЖКА ГРУЗОВОГО ВАГОНА | 2005 |
|
RU2292282C1 |
| Система мониторинга состояния грузового железнодорожного вагона | 2022 |
|
RU2798214C1 |
| СИСТЕМА ДИСТАНЦИОННОГО МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2681275C1 |
| Двухосная железнодорожная тележка | 1982 |
|
SU1093589A1 |
| ДАТЧИК СИСТЕМЫ БЕСПРОВОДНОГО КОНТРОЛЯ НАГРЕВА БУКС | 2009 |
|
RU2413644C1 |
Изобретение относится к системам мониторинга состояния железнодорожного подвижного состава, в частности грузовых вагонов. Для определения нагрузки на ось (3) колесной пары достаточно измерений в двух измерительных поперечных сечениях в вертикальных плоскостях «А-А» в средней части оси (3) колесной пары либо в консольных частях оси (3) колесной пары. В результате увеличивается чувствительность и точность получаемой информации о весе перевозимого груза. 7 н. и 25 з.п. ф-лы, 15 ил.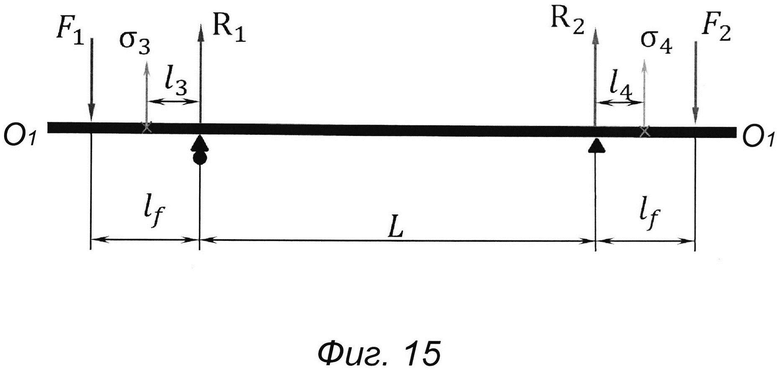
1. Способ мониторинга железнодорожного грузового вагона, включающий в себя следующие действия:
- размещают комплекты по крайней мере из двух измерительных датчиков на оси по меньшей мере одной из колесных пар, при этом рядом размещенные соседние измерительные датчики каждого комплекта размещают вне центральной продольной плоскости, проходящей через продольную ось O1-O1 симметрии колесной пары, затем
- измеряют угол θ между проекциями ближайших соседних измерительных датчиков каждого из комплектов на вертикальную плоскость, перпендикулярную продольной оси симметрии O1-O1 колесной пары каждого из комплектов;
- вносят значение углов θ каждого из комплектов в информационно электронный блок для использования этих значений в качестве постоянной для данного значения углов θ каждого из комплектов в алгоритмах математических вычислений при определении напряжений, возникающих в соответствующей оси колесной пары;
- фиксируют с помощью измерительных датчиков отклонения контролируемых параметров технического состояния железнодорожного грузового вагона, которые подают в информационные электронные блоки с соответствующим программным обеспечением, где производится обработка и хранение данных измерений.
2. Способ мониторинга железнодорожного грузового вагона, включающий в себя следующие действия:
- размещение измерительных датчиков в средней части оси по меньшей мере одной из колесных пар, при этом рядом размещенные соседние измерительные датчики каждого комплекта размещают вне центральной продольной плоскости, проходящей через продольную ось O1-O1 симметрии колесной пары, затем
- измеряют угол θ между проекциями ближайших соседних измерительных датчиков каждого из комплектов на вертикальную плоскость, перпендикулярную продольной оси симметрии O1-O1 колесной пары каждого из комплектов;
- вносят значение углов θ каждого из комплектов в информационно электронный блок для использования этих значений в качестве постоянной для данного значения углов θ каждого из комплектов в алгоритмах математических вычислений при определении напряжений, возникающих в соответствующей оси колесной пары;
- фиксируют с помощью измерительных датчиков отклонения контролируемых параметров технического состояния железнодорожного грузового вагона, которые подают в информационные электронные блоки с соответствующим программным обеспечением, где производится обработка и хранение данных измерений.
3. Способ мониторинга по п. 2, при котором производят размещение комплекта измерительных датчиков в средней части оси по меньшей мере одной из колесных пар в одной вертикальной плоскости, перпендикулярной продольной оси симметрии O1-O1 колесной пары, образующей одно поперечное измерительное сечение.
4. Способ мониторинга по п. 2, при котором производят размещение измерительных датчиков в средней части оси колесных пар по крайней мере в двух вертикальных плоскостях, перпендикулярных продольной оси симметрии O1-O1 колесной пары, образующих по крайней мере два поперечных измерительных сечения; при этом измерительные датчики в каждом из измерительных сечений не размещены в одной плоскости, проходящей через продольную ось симметрии O1-O1 колесной пары.
5. Способ мониторинга железнодорожного грузового вагона, включающий в себя следующие действия:
- размещают комплекты по крайней мере из двух измерительных датчиков по меньшей мере в одной консольной части оси колесной пары, при этом рядом размещенные соседние измерительные датчики каждого комплекта размещают вне центральной продольной плоскости, проходящей через продольную ось O1-O1 симметрии колесной пары;
- измеряют угол θ между проекциями ближайших соседних измерительных датчиков каждого из комплектов на вертикальную плоскость, перпендикулярную продольной оси симметрии O1-O1 колесной пары каждого из комплектов;
- вносят значение углов θ каждого из комплектов в информационно электронный блок для использования этих значений в качестве постоянной для данного значения углов θ каждого из комплектов в алгоритмах математических вычислений при определении напряжений, возникающих в соответствующей оси колесной пары;
- фиксируют с помощью измерительных датчиков отклонения контролируемых параметров технического состояния железнодорожного грузового вагона, которые подают в информационные электронные блоки с соответствующим программным обеспечением, где производится обработка и хранение данных измерений.
6. Способ мониторинга железнодорожного грузового вагона по п. 5, при котором измерительные датчики размещают на галтели консольной части оси колесной пары.
7. Способ мониторинга железнодорожного грузового вагона по п. 5, при котором измерительные датчики размещают на торце консольной части оси колесной пары.
8. Система мониторинга железнодорожного грузового вагона, содержащего кузов, установленный на ходовые тележки с колесными парами, включающая в себя комплект измерительных датчиков, связанных линиями внутренней связи с информационными электронными блоками, предназначенными для сбора, обработки и хранения данных, линии внешней связи для передачи данных от информационных электронных блоков к внешним блокам индикации информации и управления системой мониторинга, блоки питания, отличающаяся тем, что измерительные датчики размещены на оси по меньшей мере одной из колесных пар, при этом система содержит комплект, состоящий по меньшей мере из двух измерительных датчиков, из которых рядом размещенные непосредственно друг с другом ближайшие соседние датчики не лежат в одной центральной общей продольной плоскости, проходящей через продольную ось O1-O1 симметрии колесной пары.
9. Система мониторинга по п. 8, отличающаяся тем, что в качестве измерительных датчиков использованы тензорезисторы, преобразующие величину упругой деформации оси колесной пары в электрический сигнал.
10. Система мониторинга по п. 8, отличающаяся тем, что в качестве измерительных датчиков использованы датчики ускорения, используемые для контроля за состоянием колесной пары.
11. Система мониторинга по п. 8, отличающаяся тем, что в качестве блока питания использован аккумулятор.
12. Система мониторинга по п. 8, отличающаяся тем, что в качестве блока питания использован генератор электрического тока.
13. Система мониторинга железнодорожного грузового вагона, содержащего кузов, установленный на ходовые тележки с колесными парами, включающая в себя комплект измерительных датчиков, связанных линиями внутренней связи с информационными электронными блоками, предназначенными для сбора, обработки и хранения данных, линии внешней связи для передачи данных от информационных электронных блоков к внешним блокам индикации и управления системой, блоки питания, отличающаяся тем, что комплект измерительных датчиков размещен на оси по меньшей мере одной из колесных пар, при этом измерительные датчики размещены в одной вертикальной плоскости А-А, образующей одно измерительное вертикальное сечение, перпендикулярное продольной оси симметрии O1-O1 колесной пары, при этом рядом размещенные непосредственно друг с другом ближайшие соседние датчики не лежат в одной центральной общей продольной плоскости, проходящей через продольную ось O1-O1 симметрии колесной пары.
14. Система мониторинга по п. 13, отличающаяся тем, что в качестве измерительных датчиков использованы тензорезисторы, преобразующие величину упругой деформации оси колесной пары в электрический сигнал.
15. Система мониторинга по п. 13, отличающаяся тем, что в качестве измерительных датчиков использованы датчики ускорения, используемые для контроля за состоянием колесной пары.
16. Система мониторинга по п. 13, отличающаяся тем, что в качестве блока питания использован аккумулятор.
17. Система мониторинга железнодорожного грузового вагона, содержащего кузов, установленный на ходовые тележки с колесными парами, включающая в себя комплекты измерительных датчиков, связанных линиями внутренней связи с информационными электронными блоками, предназначенными для сбора, обработки и хранения данных, линии внешней связи для передачи данных от информационных электронных блоков к внешним блокам индикации и управления системой, блоки питания, отличающаяся тем, что в средней части оси по меньшей мере одной из колесных пар в вертикальных плоскостях, образующих по меньшей мере два поперечных измерительных вертикальных сечения, перпендикулярных продольной оси симметрии O1-O1 колесной пары, при этом в каждом из измерительных сечений размещен комплект из по крайней мере двух измерительных датчиков, из которых рядом размещенные непосредственно друг с другом ближайшие соседние датчики не лежат в одной центральной общей продольной плоскости, проходящей через продольную ось O1-O1 симметрии колесной пары.
18. Система мониторинга по п. 17, отличающаяся тем, что в качестве измерительных датчиков использованы тензорезисторы, преобразующие величину упругой деформации оси колесной пары в электрический сигнал.
19. Система мониторинга по п. 17, отличающаяся тем, что в качестве измерительных датчиков использованы датчики ускорения, используемые для контроля за состоянием колесной пары.
20. Система мониторинга по п. 17, отличающаяся тем, что в качестве блока питания использован аккумулятор.
21. Система мониторинга железнодорожного грузового вагона, содержащего кузов, установленный на ходовые тележки с колесными парами, включающая в себя комплекты измерительных датчиков, связанных линиями внутренней связи с информационными электронными блоками, предназначенными для сбора, обработки и хранения данных, линии внешней связи для передачи данных от информационных электронных блоков к внешним блокам индикации и управления системой, блоки питания, отличающаяся тем, что в вертикальных плоскостях, образующих по меньшей мере два поперечных измерительных сечения, перпендикулярных продольной оси по меньшей мере одной из колесных пар, размещены по меньшей мере два измерительных датчика, при этом рядом размещенные непосредственно друг с другом ближайшие соседние датчики не лежат в одной центральной общей продольной плоскости, проходящей через продольную ось симметрии O1-O1 колесной пары, при этом каждое из указанных поперечных измерительных сечений размещено в консольной части оси колесной пары.
22. Система мониторинга по п. 21, отличающаяся тем, что поперечное измерительное сечение размещено между предподступичной и подступичной участками оси колесной пары, при этом измерительные датчики установлены на галтели - плавном переходе между указанными участками как месте концентрации наибольшего внутреннего напряжения в оси колесной пары.
23. Система мониторинга по п. 21, отличающаяся тем, что информационные электронные блоки, блок связи, блок питания размещены на монтажной плате, выполненной в виде двух полуколец, установленных на оси колесной пары и закрытых защитным кожухом, также выполненным из двух соединенных между собой защитных полуколец.
24. Система мониторинга по п. 21, отличающаяся тем, что защитный кожух дополнительно закрыт предохранительным кольцом.
25. Система мониторинга по п. 21, отличающаяся тем, что в качестве измерительных датчиков использованы тензорезисторы, преобразующие величину упругой деформации оси колесной пары в электрический сигнал.
26. Система мониторинга по п. 21, отличающаяся тем, что в качестве измерительных датчиков использованы датчики ускорения (акселерометры), используемые для контроля за состоянием колесной пары.
27. Система мониторинга по п. 21, отличающаяся тем, что в качестве измерительных датчиков использованы датчики температуры, используемые для контроля буксового узла колесной пары.
28. Система мониторинга по п. 21, отличающаяся тем, что в качестве измерительных датчиков использованы датчики числа оборотов колесной пары, используемые для определения скорости движения железнодорожного грузового вагона.
29. Система мониторинга по п. 21, отличающаяся тем, что в качестве блока питания использован аккумулятор.
30. Система мониторинга по п. 21, отличающаяся тем, что в качестве блока питания использован генератор электрического тока.
31. Система мониторинга по п. 21, отличающаяся тем, что одна часть генератора электрического тока размещена на неподвижной части - адаптере, вторая - на оси колесной пары.
32. Система мониторинга по п. 21, отличающаяся тем, что одна часть генератора электрического тока размещена на неподвижной части - буксовом узле, вторая - на торце оси колесной пары.
| ВСТРОЕННАЯ СИСТЕМА ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТОВАРНЫХ ВАГОНОВ | 2015 |
|
RU2600420C2 |
| Способ соединения звеньев браслета и т.п. | 1948 |
|
SU76711A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПОВРЕЖДЕНИЙ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ ЕДИНИЦ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2494902C2 |
| CN 1094470345 A, 15.03.2019. | |||

